SST89E516RD仿真芯片使用方法
一、仿真设定
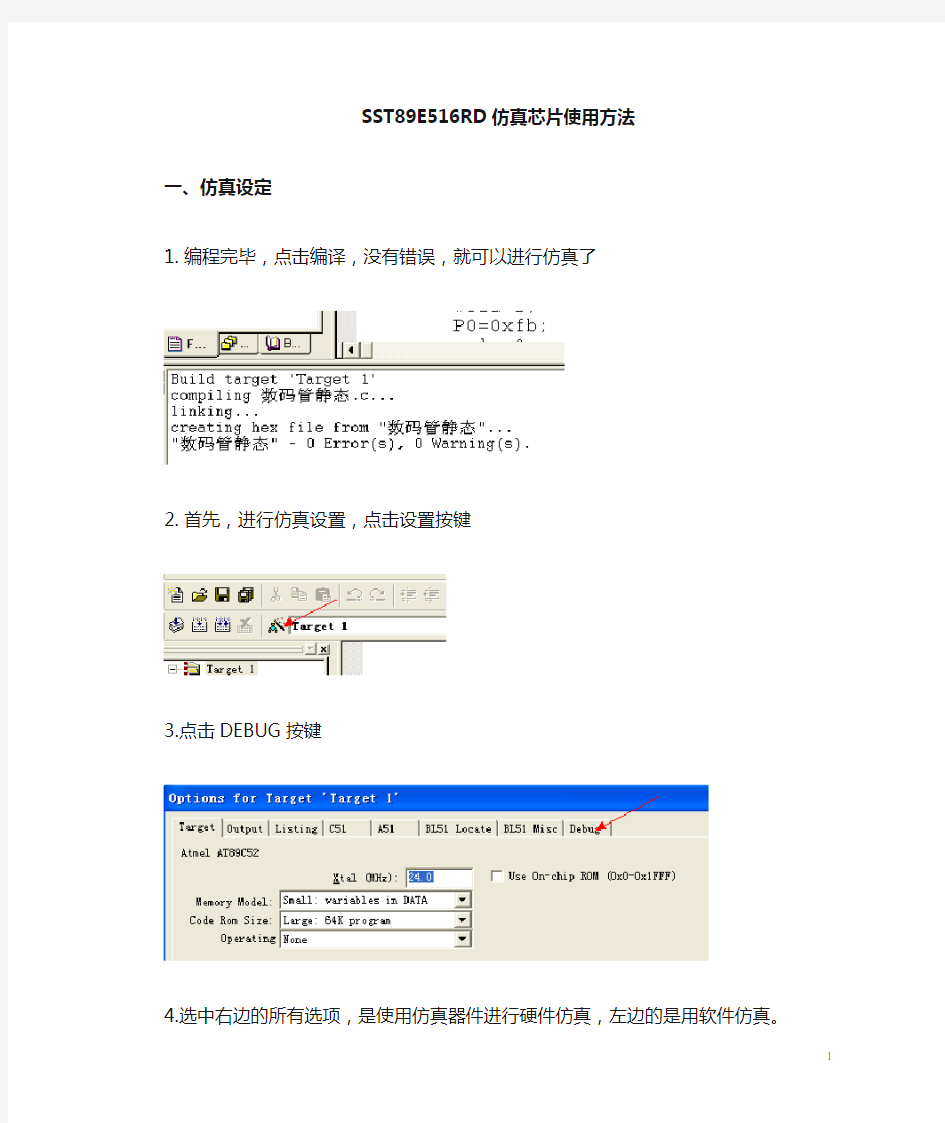
1.编程完毕,点击编译,没有错误,就可以进行仿真了
2.首先,进行仿真设置,点击设置按键
3.点击DEBUG按键
4.选中右边的所有选项,是使用仿真器件进行硬件仿真,左边的是用软件仿真。
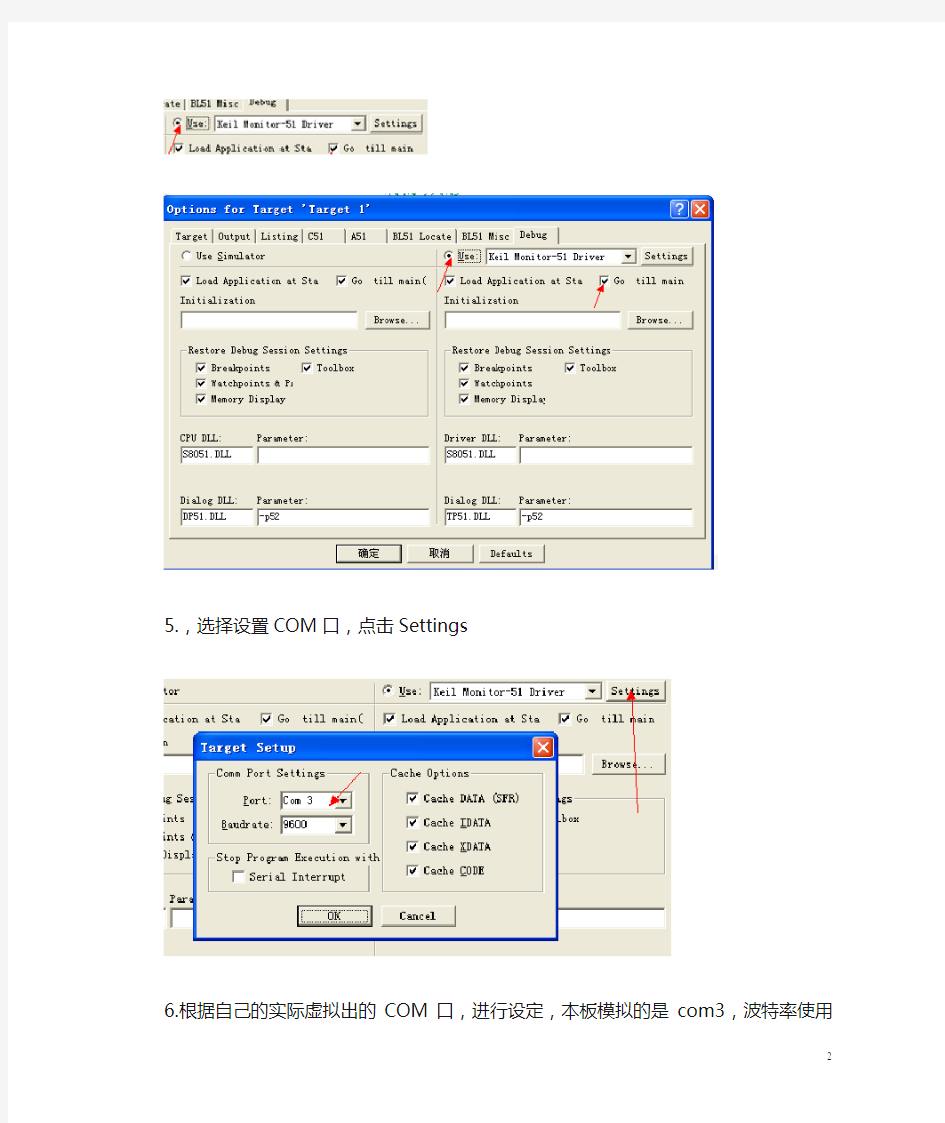
5.,选择设置COM口,点击Settings
6.根据自己的实际虚拟出的COM口,进行设定,本板模拟的是com3,波特率使用默认的9600就可以
设置完毕,点击OK
二、开始仿真
1.首先给EV-51电路板上电
2.点击仿真按键
3.进入仿真环境
4.硬件仿真使用方法同软件仿真一样
5.肯能遇到的问题解答
?如果出现以下界面
可能原因:1.电路板未上电,给电路板上电即可解决
https://www.doczj.com/doc/a917268758.html,口设置不对,点击Settings..,设置com口即可设计完毕后,点击Try Again,即可。
51仿真器使用说明 初学51单片机或是业余玩玩单片机开发,每次总要不断的调试程序,如没有仿真器又不喜欢用软件仿真,那只有每次把编译好的程序烧录到芯片上,然后在应用电路或实验板上观察程序运行的结果,对于一些小程序这样的做好也可以很快找到程序上的错误,但是程序稍大,变量也会变的很多,系统调试就极为复杂,此时就需要有一台仿真器。一台好的仿真器非常贵,这里介绍这种自制的51芯片仿真器。 这个仿真器的仿真CPU是使用SST公司的SST89C516RD2。 1.制作带串口的的最小应用板 无论是EasyIAP还是仿真器,都需要用串行口使SST89C58芯片和PC上位机进行通讯传输数据,因此先要设计RS232/TTL转换电路。由于现在的电脑多取消了普通串口,因此我们此处设计了一个usb转TTL的串口接口电路,使用的接口芯片是PL2303。 2.通过编程器烧写仿真监控程序 接下来需要把仿真CPU的HEX文件烧到SST89C58里面,再把它插到上面的最小系统电路中就可以了。因为SST89C58有两个程序存储区,在这里要注意的是在烧写时就把仿真监控程序烧到SST89C58的第二个存储区也就是的RB1。烧写时要求用支持SST89C58的编程器。 3. 仿真器原理简介 SST的MCU SoftICE通过PC的一个COM口与KEIL uVision2 Debugger 通讯它可以实时地调试目标程序,因此提供使用SST单片机的工程师简单有效和容易使用在板上调试程序。尽管小而紧凑,SoftICE却提供高级仿真器的大部分功能与KEIL uVision2 Debugger 一起使用。 SoftICE提供以下特性: 源代码调试支持汇编语言和C51高级语言 单步执行STEP和STEP OVER 断点调试做多到10个固定和1个临时断点 全速运行 显示修改变量 读/写数据存储器 读/写代码存储器 读/写SFR特殊功能寄存器 读/写P0-P3端口 下载INTEL HEX文件 对8051程序存储区的反汇编 在线汇编 SST MCU产品特有的IAP功能In Application Programming SoftICE 用到的MCU 硬件资源 SST的SoftICE用到的MCU硬件资源如下
电路仿真软件的使用方法
河南机电高等专科学校软件实习报告 系部:电子通信工程系 专业:应用电子技术 班级:应电111 学生姓名: xxx 学号: xxxxxxxx
201x年xx月xx日 实习任务书 1.时间:201x年xx月xx日~201x年xx月xx日 2. 实训单位:河南机电高等专科学校 3. 实训目的:学习电路仿真软件的使用方法 4. 实训任务: ①了解电路仿真与EDA技术的基础常识; ②了解电路仿真软件的作用及其特点; ③了解软件仿真结果与实际电路结果的异同; ④熟悉电路仿真软件的界面,能熟练的在电路仿真软件环境中绘制电路图; ⑤能够使用电路仿真软件的各种分析功能对电路进行软件仿真; ⑥会使用电路仿真软件中的虚拟仪器对电路进行数据和波形等的测量; ⑦作好实习笔记,对自己所发现的疑难问题及时请教解决; ⑧联系自己专业知识,体会本软件的具体应用,总结自己的心得体会; ⑨参考相关的的书籍、资料,认真完成实训报告。
软件实习报告 前言:经过半学期深入地学习基础电路知识,我们终于有机会学习电路仿真用软件设计并检验电路,深入的理解电路定理,增加我们对专业的兴趣,增强我们的实际动手操作能力。 实习报告: 实验一、戴维南定理和诺顿定理的研究 一、实验目的 1、求出一个已知网络的戴维南等效电路。 2、求出一个已知网络的诺顿等效电路。 3、验证戴维南定理和诺顿定理的正确性。
二、实验器材 直流电压源 1个 电压表 1个 电流表 1个 电阻 3个 万用表 1个 三、实验原理及实验电路 任何一个具有固定电阻和电源的线性二端网络,都可以用一个串联电阻的等效电压源来代替,这个等效电压源的电压等于原网络开路时的端电压U oc ,或用一个并联电阻的等效电流源来代替,这个等效电压源的电压等于原网络开路时的端电压I sc 。下图电路中负载为RL ,试用EWB 仿真测得到除去负载后的二端网络的开路电压、短路电流以及等效电阻大小。 0.5Ω RL=0.25Ω
FANUC机器人仿真软件操作手册
2008年10月第1版ROBOGUIDE 使用手册(弧焊部分基础篇)
目录 目录 (1) 第一章概述 (2) 1.1. 软件安装 (2) 1.2. 软件注册 (3) 1.3. 新建Workcell的步骤 (4) 1.3.1. 新建 (4) 1.3.2. 添加附加轴的设置 (11) 1.4. 添加焊枪,TCP设置。 (16) 1.5. Workcell的存储目录 (20) 1.6.鼠标操作 (22) 第二章创建变位机 (25) 3.1.利用自建数模创建 (25) 3.1.1.快速简易方法 (25) 3.1.2.导入外部模型方法 (42) 3.2.利用模型库创建 (54) 3.2.1.导入默认配置的模型库变位机 (54) 3.2.2.手动装配模型库变位机 (58) 第三章创建机器人行走轴 (66) 3.1. 行走轴-利用模型库 (66) 3.2. 行走轴-自建数模 (75) 第四章变位机协调功能 (82) 4.1. 单轴变位机协调功能设置 (82) 4.2. 单轴变位机协调功能示例 (96) 第五章添加其他外围设备 (98) 第六章仿真录像的制作 (102)
第一章概述 1.1. 软件安装 本教程中所用软件版本号为V6.407269 正确安装ROBOGUIDE ,先安装安装盘里的SimPRO,选择需要的虚拟机器人的软件版本。安装完SimPRO后再安装WeldPro。安装完,会要求注册;若未注册,有30天时间试用。
如果需要用到变位机协调功能,还需要安装MultiRobot Arc Package。 1.2. 软件注册 注册方法:打开WeldPRO程序,点击Help / Register WeldPRO 弹出如下窗口,
实验一实验箱仿真器使用及单片机I/O口编程 一、实验目的 1.熟悉伟福单片机实验箱仿真器的使用方法。 2. 掌握单片机的指令系统及上机实验过程。 3.掌握源程序的程序调试方法(包括断点设置、单步执行、连续执行等)及通过相应的窗口查看寄存器、存储器内容等方法。 4.掌握单片机的I/O口的特点及应用,如P1口进行数据输入、输出的编程方法。 5.学习延时子程序的编写与使用。 二、实验属性(验证性) 三、实验仪器设备及器材 1.伟福Lab8000单片机实验仪一台; 2.PC机一台; 3. 连接导线十根。 四、实验原理及要求 1.阅读所购实验指导书前置实验箱的硬件及附录A中相关部分资料,了解伟福单片机实验仪的键盘和软件调试环境的使用方法。 2.阅读相关程序,编写实验要求对应程序,调试运行观察实验运行结果。 五、实验内容及步骤 实验内容 内容1 输入给定的或自己编写的简单程序,通过软仿真学习汇编程序调试方法; 内容2 实验箱的P1.0—P1.3口连接四个发光二极管,编写程序,开机后控制四个发光管循环点亮,规律如下图所示: O X X X X O X X X X O X X X X O 循环运行,间隔一秒变化一次,显示出闪烁效果。 内容3 P1.0—P1.3口连接四个发光二极管,P1.4—P1.7接四个拨码开关,编写程序,使得四个开关分别控制四个发光管: 对应的开关推上去时发光管亮, 对应的开关推下来时发光管灭。 实验步骤(实验内容2、3的程序须在实验前自己设计编写完成) 1、PC机--实验箱(仿真器-目标板(用户板))的连接; 认真阅读仿真器实验说明,了解仿真器、仿真头上插座、插头的用途及形状,跳线 含义及设置,完成“PC机--实验箱(仿真器-目标板(用户板))的连接”。 2、安实验要求先连接插接线,然后再打开实验箱电源; 3、进入开发试验软件环境,进行仿真器设置; 4、汇编语言源程序输入(或打开已有 . ASM源文件)、编辑、运行、调试。 六、实验报告
一.当今流行的电路仿真软件及其特性 电路仿真属于电子设计自动化(EDA)的组成部分。一般把电路仿真分为三个层次:物理级、电路级和系统级。教学中重点运用的为电路级仿真。 电路级仿真分析由元器件构成的电路性能,包括数字电路的逻辑仿真和模拟电路的交直流分析、瞬态分析等。电路级仿真必须有元器件模型库的支持,仿真信号和波形输出代替了实际电路调试中的信号源和示波器。电路仿真主要是检验设计方案在功能方面的正确性。电路仿真技术使设计人员在实际电子系统产生之前,就有可能全面地了解电路的各种特性。目前比较流行的电路仿真软件大体上说有:ORCAD、Protel、Multisim、TINA、ICAP/4、Circuitmaker、Micro-CAP 和Edison等一系列仿真软件。 电路仿真软件的基本特点: ●仿真项目的数量和性能: 仿真项目的多少是电路仿真软件的主要指标。各种电路仿真软件都有的基本功能是:静态工作点分析、瞬态分析、直流扫描和交流小信号分析等4项;可能有的分析是:傅里叶分析、参数分析、温度分析、蒙特卡罗分析、噪声分析、传输函数、直流和交流灵敏度分析、失真度分析、极点和零点分析等。仿真软件如SIMextrix只有6项仿真功能,而Tina6.0有20项,Protel、ORCAD、P-CAD等软件的仿真功能在10项左右。专业化的电路仿真软件有更多的仿真功能。对电子设计和教学的各种需求考虑的比较周到。例如TINA的符号分析、Pspice和ICAP/4的元件参数变量和最优化分析、Multisim的网络分析、CircuitMaker的错误设置等都是比较有特色的功能。 Pspice语言擅长于分析模拟电路,对数字电路的处理不是很有效。对于纯数字电路的分析和仿真,最好采用基于VHDL等硬件描述语言的仿真软件,例如,Altera公司的可编程逻辑器件开发软件MAX+plusII等。 ●仿真元器件的数量和精度: 元件库中仿真元件的数量和精度决定了仿真的适用性和精确度。电路仿真软件的元件库有数千个到1--2万个不等的仿真元件,但软件内含的元件模型总是落后于实际元器件的生产与应用。因此,除了软件本身的器件库之外,器件制造商的网站是元器件模型的重要来源。大量的网络信息也能提供有用的仿真模型。设计者如果对仿真元件模型有比较深入的研究,可根据最新器件的外部特性参数自定义元件模型,构建自己的元件库。对于教学工作者来说,软件内的元件模型库,基本上可以满足常规教学需要,主要问题在于国产元器件与国外元器件的替代,并建立教学中常用的国产元器件库。 电路仿真软件的元件分类方式有两种:按元器件类型如电源、二极管、74系列等分成若干个大类;或按元器件制造商分类,大多数仿真软件有电路图形符号的预览,便于选取使用。
DMI仿真软件操作说明书(doc 11页)
DMI仿真软件使用说明书 DMI仿真软件,让你更快的掌握DMI的使 用,熟悉DMI的功能… 制作小组:21组 组长: 黄鸿珺 20088525 组员: 魏红燕 20088510 王珂麟 20088520 高正乾 20088524
目录
产品说明书 使用须知: 由于该系统完全模拟CTCS功能所以读者需要了解CTCS的功能。CTCS系统描述 CTCS基本功能:在不干扰机车乘务员正常驾驶的前提下有效地保证列车运行安全。 1.安全防护: 在任何情况下防止列车无行车许可运行。防止列车超速运行。包括:列车超过进路允许速度;列车超过线路结构规定的速度;列车超过机车车辆构造速度;列车超过铁力有关运行设备的限速; 防止列车溜逸。 2.人机界面: 为乘务员提供的必须的显示,数据输出及操作装置。能够以字符,数字及图形等方式显示列车运行速度,允许速度,目标速度和目标距离。能够实现给出列车超速,制动,允许缓解等表示以及设备故障状态的报警。 3.检查功能: 具有开机自检和动态检测功能。具有关键动作的记录功能及监测接口。 4.可靠性和安全性: 按照信号故障导向安全原则进行系统设计,采用冗余结构,满足电磁兼容性相关标准。
DMI人机界面 DMI是列控车载设备的显示和操作界面,安装在便于司机操作和观察的位置。相关规定应符合有关标准和技术条件的要求 1.报警功能 人机界面应设有声报警功能,能够及时给出列车超速,切除牵引力,制动,允许缓解或故障状态等的报警和表示。 2.人机界面应有数据功能 输出列车参数有关的信息,输入操作应简明并有清晰的表示。对机车乘务员输入的数据和操作应进行合理性判断。 3.设置位置: 应设置在机车乘务员便于观察及可接近的区域,符合标准化安装尺寸要求。显示部分要便于观察,常用按钮,开关应易于机车乘务员操作。 4.DMI的显示与操作标准统一 文字及语音信息采用中文,用双针速度表,数字,图形显示相结合的方式提供运行速度,允许速度,目标速度和目标距离。 软件设计原理及实现的功能: 根据CTCS系统的功能要求,设计出符合要求的CTCS系统DMI界面的B,D区域,由visual c #2008编写的,制作DMI界面的B,D区,实现列车速度与目标距离的显示情况,以及相关的功能部件的显示。大致有两部分构成,实现两个区域的相互关联。 根据需求分析,运用软件编写符合要求的DMI界面相应区域,实现
第一章Xlink仿真器特性描述 ?硬件特性 ?USB 2.0全速接口 ?JTAG / IEEE1149.1标准 ?可编程JTAG时钟,最高可达6Mbits / sec ?JTAG信号电平自适应支持,1.2V ~ 5V ?MULI-ICE 20-PIN标准调试接口 ?USB串口扩展,RS232标准,最高支持921600波特率 ?铝合金外壳,小巧便携 ?软件特性 ?支持在线调试多种CPU内核 ●arm720t ●arm7tdmi ●arm920t ●arm9tdmi ●arm926ejs ●arm966 ●avr ●arm11 ●cortex_m3 ●cortex_m8 ●xscale ?支持GDB调试协议 ?支持单步、跳转、全速、条件断点、变量显示、堆栈跟踪、内存查看等?支持在线烧写NOR Flash、NAND Flash及某些CPU的片内ROM ?支持低阶命令行功能,使用telnet方式登陆 ?支持Eclipse集成开发环境
第二章安装Xlink USB JTAG服务程序 双击xlink-usb-jtag-setup-0.4.0.exe,进入安装向导 点击下一步 目标文件夹路径不能带有空格符号,建议安装在C盘根目录下。
点击安装,进入安装过程 点击完成按钮,结束安装向导 备注:Xlink USB JTAG驱动程序目录为安装目录下的driver目录
第三章安装Xlink USB JTAG驱动程序 将Xlink仿真器插入USB口,在右下角会出现设备插入提示 如未自动弹出驱动安装界面,请打开设备管理器,在Xlink USB Jtag上右键,并点击“更新驱动程序软件” 选择“浏览计算机以查找驱动程序软件”
使用方法: 1.本软件无需安装,解压缩后双击S7_200.exe即可使用; 2.仿真前先用STEP 7 - MicroWIN编写程序,编写完成后在菜单栏“文件”里点击“导出”,弹出一个“导出程序块”的对话框,选择存储路径,填写文件名,保存类型的扩展名为awl,之后点保存; 3.打开仿真软件,输入密码“6596”,双击PLC面板选择CPU型号,点击菜单栏的“程序”,点“装载程序”,在弹出的对话框中选择要装载的程序部分和STEP 7 - MicroWIN的版本号,一般情况下选“全部”就行了,之后“确定”,找到awl文件的路径“打开”导出的程序,在弹出的对话框点击“确定”,再点那个绿色的三角运行按钮让PLC进入运行状态,点击下面那一排输入的小开关给PLC 输入信号就可以进行仿真了。 使用教程: 本教程中介绍的是juan luis villanueva设计的英文版S7-200 PLC 仿真软件(V2.0),原版为西班牙语。关于本软件的详细介绍,可以参考 https://www.doczj.com/doc/a917268758.html,/canalPLC。 该仿真软件可以仿真大量的S7-200指令(支持常用的位触点指令、定时器指令、计数器指令、比较指令、逻辑运算指令和大部分的数学运算指令等,但部分指令如顺序控制指令、循环指令、高速计数器指令和通讯指令等尚无法支持,仿真软件支持的仿真指令可参考 https://www.doczj.com/doc/a917268758.html,/canalPLC/interest.htm)。仿真程序提供了数字信号输入开关、两个模拟电位器和LED输出显示,仿真程序同时还支持对TD-200文本显示器的仿真,在实验条件尚不具备的情况下,完全可以作为学习S7-200的一个辅助工具。 仿真软件界面介绍:
51单片机简易仿真器的制作 实验目的: 由于市场上现有的单片机仿真器非常昂贵,为了减少在开发单片机时的成本,故提出利用SST公司的SST89E564RD系列单片机制作简单的51单片机仿真器。 实验环境: 1.硬件环境: 计算机一台SST89E564RD单片机MAX232芯片串口线一根 2.软件环境: Protel99SE软件和KeilC51软件。 其中Protel99SE可以完成硬件原理图的设计,以及PCB板的制作;KeilC51可以完成工程的建立,代码的编写,程序的编译以及最终的软硬件仿真。 实验内容: 1.实验原理: 只需将SST单片机的RXD P3.0 和TXD P3.1 管脚通过一个RS232的电平转 换电路连接到PC的COM串口即可,可使用这个RS232的转换电路做一个通用的8051的下载线。下载时只需将下载线连接到用户目标板上单片机的P3.0 P3.1 VCCGND4个管脚即可进行下载或仿真。 设计的原理图如图1所示,在实际的设计过程中,添加了一个发光二极管,其目的很简单,就是为了验证仿真器供电正常。
图1 SST89E564单片机仿真器原理图 设计的SST89E564单片机仿真器的PCB 板如图2所示,在设计并印制PCB 板之后,硬件电路的设计就完成了。
图2 SST89E564单片机仿真器PCB板
2.实验步骤: 1)通过SST 串口下载软件BootLoader 下载SOFTICE 监控代码 由于SST的MCU在出厂时已经将BOOT LOADER的下载监控程序写入到芯片中,因此无需编程器就可通过SST BOOT-STRAP LOADER软件工具将用户程序下载到SST的MCU中,从而运行用户程序。 SST BOOT-STRAP LOADER软件工具还可将原来的MCU内部的下载监控程序转换为SoftICE的监控程序,从而实现SOFTICE的仿真功能。 执行SSTEasyIAP11F.exe软件运行SST Boot-Strap Loader,在内部模式下检测到对应器件的型号后,SoftICE固件通过按SoftICE菜单下“Download SoftICE”选项下载,便将SoftICE固件下载到MCU 。在BLOCK1的SST Boot-Strap Loader 会被SoftICE固件代替。 详细操作步骤如下 A 选择连接的串口 B 选择芯片型号和内部存储器模式(选择使用SST89E564RD,使用片内程序存储器)
普中51仿真器下载操作说明 首先安装普中51仿真器的驱动:(安装时,用管理员身份运行,最好要把360 等杀蠹软件先关掉成功后再打开) 双击set up图标 H3 setup^ESexe 墉setup_x54ieMe 对应什么电脑系统就装什么驱动,有win32,win64; 具体安装步骤如下: 选择路径中,选择与你keil安装的路径一样就行了(这里我们把KEIL1安装在E 盘)
一旦“安装”由灰色变成黑色,点击它就行了 最后点击确定即可。 如果电脑XP系统出现这种情况: 没有癖J DIFWI. dll J因]此这个应用程序未能启动-重新安装应用程序可能会修复此问题, 就把那个驱动安装文件中的这个 函叩Ldll 2015718 口炀应用程序扩星M12KE 复制到WINDOW SYSTEM32面,
本文这里用的是MDK Keil4.74版本,在“Debug”硬件仿真设置中找到PZ51 Tracker Driver就行了,如果没有找到就说明KEIL版本不合适,需要安装新版本的keil软件。 仿真步骤:打开一个能够正常编译通过的工程
蜉虻淄更斗 由 * 官盅主山#赛M 丈兰*机何-奇21、RMM 宰口丈虹 发零养号取」o.i-^p-oj - p7i &ior4 EH F f^it V PTW Piajrrt Flash Ochug Rtripheraik T DA J I 5VCS ^X'iinaguw Hf|p j 「一』割.一 二 I I F ■株%|毒竺帕" 乏 _______________________________________________ 日9 ¥ 姓 专笆目莎暨| %" | Tflrffrtt 卜|卷&蓉幸朗 由可记 ■ @ 固心tu □ REG51,M 国 mmWL ■ x 1、进入KEIL 硬件仿真设置 j_J F arget 1 E-^ Saurce Group 1 为 SIARIJPA5_ S -[£] Eiiin.c 孟J&EG5LT □ P .右 F U 7 I 顷- Build Output 4-6 47 — 4S void UsartC&nf iomira^ian (I- 49 F 50 SCOH-gS “讦旨布丁作方于1 51 1MW==10SMC I F 厂云也汁婚程工涪万式£ 5; PC03T-3KE 2-7 打波特军H 倍 4^3 rHi=cxFa : ”奸救舞戒培宅日宣.往急蓝才玉是弟况的 S4 TLl*i :Xr*2 SS 〃 E£=Lr 〃打开接收中新 5< /< El=l ; 〃打开总中酎 57 TR1-1; 〃位开甘钦对 5? S9 J *.此入出一 矗- W2J 薪祐- £? L £T void Dela^lOcis ( -iLSlzned int cf F/1M 室 O LIS ce R ( €9 un#igH/di ch4)x A f b ;
PLC是“Programmable Logic Controller(可编程序逻辑控制器)”的英文缩写,是采用微电脑技术制造的自动控制设备。它以顺序控制为主,回路调节为辅,能完成逻辑判断、定时、记忆和算术运算等功能。与传统的继电器控制相比,PLC控制具有控制速度快、可靠性高、灵活性强、硬件接线简单、改变工艺方便等优点。 PLC的基本构成见图1-1,简要说明如下: 1. 中央处理器CPU 起运算控制作用,指挥协调整机运行。 2. 存储器ROM RAM 存放程序和数据 (1) 系统程序存储器ROM 存放生产厂家写入的系统程序,用户不可更改。 (2) 随机读写存储器RAM 存放随机变化的数据。 (3) 用户程序存储器EPROM或E2 PROM 存放用户编写的用户程序。 3. 通信接口与计算机、编程器等设备通信,实现程序读写、监控、联网等功能。 4. 电源利用开关电源将AC220V转变成DC5V供给芯片;DC12V供给输出继电器; DC24V供给输入端传感器。另有锂电池做为备份电源。 5. 输入接口IN 将外部开关或传感器的信号传递给PLC。 6. 输出接口OUT 将PLC的控制信号输出到接触器、电磁阀线圈等外部执行部件。作为一般技术人员,对于上述构成,主要关心的是输入输出接口。输入输出接口的详细情况,见第9页§3.2的有关介绍和图2-3 PLC输入输出接口电路示意图。
随着PLC技术的发展,其功能越来越多,集成度越来越高,网络功能越来越强,PLC与PC 机联网形成的PLC及其网络技术广泛地应用到工业自动化控制之中,PLC集三电与一体,具有良好的控制精度和高可靠性,使得PLC成为现代工业自动化的支柱。 PLC的生产厂家和型号、种类繁多,不同型号自成体系,有不同的程序语言和使用方法,但是编程指导思想和模式是相同的,其编程和调试步骤如下: 1. 设计I/O接线图 根据现场输入条件和程序运行结果等生产工艺要求,设计PLC的外围元件接线图,作为现场接线的依据,也作为PLC程序设计的重要依据。(I/O接线图参见9页图2-3) 2. 编制PLC的梯形图和指令语句表 根据生产工艺要求在计算机上利用专用编程软件编制PLC的梯形图,并转换成指令语句表(FX系列PLC编程常用指令见13页表2-2)。 3. 程序写出与联机调试 用编程电缆连接计算机和PLC主机,执行“写出”操作,将指令语句表写出到PLC主机。PLC 输入端连接信号开关,输出端连接执行部件,暂不连接主回路负载,进行联机调。 PLC的控制方式是由继电器控制方式演化而来,由PLC内部的微电子电路构成的模拟线圈和触点取代了继电器的线圈和触点,用PLC 的程序指令取代继电器控制的连接导线,将各个元件按照一定的逻辑关系连接起来,PLC控制的梯形图在许多方面可以看作是继电器控制的电路图。 可以理解为,PLC内部有大量的由软件程序构成的继电器、计时器和计数器等软元件,用软件程序按照一定的规则将它们连接起来,取代继电控制电路中的控制回路。 本文第一章介绍利用PLC计算机仿真软件,学习PLC用户程序设计,并且仿真试运行、调试程序。由于仿真软件不需要真正的PLC主机,就可以在计算机上仿真运行调试,所以它既是学习PLC程序设计的得力助手,也给实际工作中调试程序带来很大方便。本章的编程仿真练习题,请读者认真完成,会对掌握PLC应用大有帮助。 本文第二章介绍PLC实际应用的编程软件的使用方法。 §2 PLC计算机仿真软件 FX系列PLC可用“FX-TRN-BEG-C”仿真软件,进行仿真运行。该软件既能够编制梯形图程序,也能够将梯形图程序转换成指令语句表程序,模拟写出到PLC主机,并模拟仿真PLC控制现场机械设备运行。 使用“FX-TRN-BEG-C”仿真软件,须将显示器象素调整为1024*768,如果显示器象素较低,则无法运行该软件。 §2.1 仿真软件界面和使用方法介绍 启动“FX-TRN-BEG-C”仿真软件,进入仿真软件首页。软件的A-1、A-2两个章节,介绍PLC 的基础知识,此处从略,请读者自行学习。从A-3开始,以后的章节可以进行编程和仿真培训练习,界面显示如图2-1所示。
普中A R M仿真器使用 说明书 -CAL-FENGHAI.-(YICAI)-Company One1
普中ARM仿真器下载操作说明 本文这里用的是MDK 版本,如果在硬件仿真设置中找不到CMSIS-DAP请更换版本,版本过低的KEIL不会显示CMSIS-DAP-Debugger。 注意:ARM 仿真器在WIN10 上当仿真器插到电脑上时,随电脑开机重启使用之前要把USB 拔了重插才能识别 步骤:打开一个能够正常编译通过的工程
1、进入KEIL硬件仿真设置 2、设置好硬件仿真后我们点Settings进入更深入的设置,请按照我这个面板这样设置。 (PS:这里我们也可以选择SW模式,把SWJ勾上Port选择SW就是SW模式了)
3、设置好debug页面。我们点击Flash Download进入下载设置把Rese and Run 勾上
4、点击add我们就来到了这一个页面,找到STM32F10x High-density Flash 512k 选中点add添加就回到第4步页面,有显示STM32F10x High-density 512k 点ok 完成设置。 6、完成以上设置后我们点Utilities页面,这里也选择CMSIS-DAP选择好之后我们点ok完成设置(ps:如果这个界面没有Use Target for flash Programming选择CMSIS-DAP就忽略这一项)
7、(keil下载)设置好之后我们编译程序没问题我们点Download进行下载提示Verify OK就说明已经下载成功了 8、(在线仿真调试)我们可以直接在keil里面调试程序,点工具栏的start debug 开始调试,如果退出也是点这个按钮
MSP-FET430UIF 仿真器使用说明
目录 1.功能描述 2.JTAG连接关系 3.IAR开发环境的安装 4.仿真器驱动的安装 5.配置仿真器及仿真方法 5.1编译程序 5.2正确设置仿真器的参数 5.3如何用msp430仿真器调试程序 5.4第三方软件下载程序 6.注意事项 7.常见问题答解
1. 功能描述 a. 本仿真器为USB接口的JTAG仿真器。USB口从计算机取电,不需要外接源, 并能针对不同需求给目标板或用户板提供1.8V~3.6V(300mA)电源。 b. 对MSP430低功耗flash全系列单片机进行编程和在线仿真. c. 完全兼容TI仪器原厂MSP-FET430UIF开发工具。 d. 支持在线升级,烧熔丝加密。 e. 采用TI仪器标准的2×7 PIN(IDC-14)标准连接器。 f. 支持IAR430、AQ430、HI-TECH、GCC 以及TI等一些第三方编译器集成开 发环境下的实时仿真、调试、单步执行、断点设置、存储器容查看修改等。 g. 支持程序烧写读取和熔丝烧断功能。 h. 支持JTAG、SBW(2 Wire JTAG)接口。 i. 支持固件升级功能。 2. JTAG连接关系 仿真器与目标板上MSP430系列MCU的连接关系分为2线连接和4线连接,如下两图所示:(注意:JTAG 接口的定义描述也可以由下图得到) 4 线连接关系示意图
2 线连接关系示意图 3. IAR开发环境的安装 我以iar for msp430 5.5.为例,但是建议安装我们提供的iar for msp430 5.2; 首先,运行“配套光盘:\ msp430软件\IAR安装软件及注册机iar for msp430 5.5.rar” 解压并进行安装。安装步骤如下图所示 等待,直至出现如下图
怎样利用电路仿真软件进行模拟电路课程的学习电路分析实验报告 实验二 学习用multisim软件对电路进行仿真 一.实验要求与目的 1.进一步熟悉multisim软件的各种功能。 2.巩固学习用multisim软件画电路图。 3.学会使用multisim里面的各种仪器分析模拟电路。 4.用multisim软件对电路进行仿真。 二、实验仪器 电脑一台及其仿真软件。 三.实验内容及步骤
(1)在电子仿真软件Multisim 基本界面的电子平台上组建如图所示的仿真电路。双击电位器图标,将弹出的对话框的“Valve”选项卡的“Increment”栏改成“1”,将“Label”选项卡的“RefDes”栏改成“RP。 ” 2)调节RP大约在35%左右时,利用直流工作点分析方法分析直 流工作点的值。直流工作点分析(DC Operating Point Analysis)是用来分析和计算电路静态工作点的,进行分析时,Multisim 自动将电路分析条件设为电感、交流电压源短路,电容断开。 单击Multisim 菜单“Simulate/Analyses/DC operating Point…”,在弹出的对话框中选择待分析的电路节点,如2图所示。单击Simulate 按钮进行直流工作点分析。分析结果如图3所示。列出了
单级阻容耦合放大电路各节点对地电压数据,根据各节点对地电压数据,可容易计算出直流工作点的值,依据分析结果,将测试结果填入表1中,比较理论估算与仿真分析结果。 表1 静态工作点数据 电压放大倍数测试 (1)关闭仿真开关,从电子仿真软件Multisim 10基本界面虚拟仪器工具条中,调出虚拟函数信号发生器和虚拟双踪示波器,将虚拟函数信号发生器接到电路输入端,将虚拟示波器两个通道分别接到电路的输入端和输出端,如图4所示。 (2)开启仿真开关,双击虚拟函数信号发生器图标“XFG1”,将打开虚拟函数信号发生器放大面板,首确认“Waveforms”栏下选取的是正弦信号,然后再确认频率为1kHZ”;再确认幅度为 10mVp,如图5所示。 四.仿真分析 动态测量仿真电路
Machining数控仿真软件简明使用手册视频教程下载:软件基本操作: 机床视图右键菜单介绍: A.XOZ平面:改变机床视图视角 B.YOZ平面:改变机床视图视角 C.XOY平面:改变机床视图视角 D.隐藏/显示床身: 在机床视图中点右键,选择“隐藏床身”或者“显示床身” E.快速定位: 让主轴移动到工件中心位置。 F.开关机舱门 3D机床模型操作: A.鼠标左键旋转 B.鼠标滚轮放大或缩小 C.按下鼠标中键平移 提示窗口: 软件菜单介绍 A.加工时间 估算加工程序所需时间
B.文件 1.导入:导入一个加工程序,但必须在E DIT模式下打开或者新建了一个程序的情况下才能导入2?保存工件:保存已加工工件 3.读入工件:打开保存的工件 C.设置 1.显示刀具轨迹 选中后会在自动加工中显示加工轨迹。 2.显示床身 选中该选项将显示床身。 3.机床声音 选中该选项将启用声音效果。 4.模型阴影 选中该选项将启用阴影效果,但是一些比较老的显卡运行速度会下降。如果速度慢请取消该选项。 D.视图 视图:当面板视图被关闭后,用该菜单将面板重新打开。 双屏显示:分别在两个显示器中显示面板和机床模型。 E.切换面板 各系统间进行切换操作。 F.设置工件 选择工件类型,工件类型为:长方体和圆柱体。 设置工件的显示精度,精度有3级: 1.性能:工件精度较低 2.平衡:工件精度中等 3.质量:工件精度较高 请根据显卡能力选择适当的精度,较高的精度资源占用高。 G.检查更新 检查是否有新版本,该功能需要联网。 H.帮助文档
2.刀具选择 1.新建刀具: 添加刀具:按“Add按钮添加新的刀具,然后在自定义刀具对话框中输入直径和长度2.编辑刀具: 双击“ Tool Select "中列表中的条目进行刀具参数编辑。 3.删除刀具: 按“ Delete ”按钮删除所选刀具。 4 .选择刀具: 鼠标移动到右边刀具栏,出现"select tool" 对话框,在里面选择所需的刀具。再点击“ Tool Number”下拉菜单,选择所需的刀号。点击“ OK确认。 将刀具移动到刀具库上,单击鼠标左键,刀具装入。将鼠标移动至刀位可以查看刀号。 3.数控面板操作 FANUC 0iM 操作控制面板急停按钮 电源开 电源关 循环启动 循环停止 自动模式编辑模式手动输入模式步进模式 手轮模式回参考点手动模式
51仿真器原理图及制作过程 -------------------------------------------------------------------------------- 51仿真器原理图及制作过程 此仿真器是采用SST89E564 芯片配合一些电子元器件制作的仿真器。仿真程序代码63K,现将此仿真器的资料整理如下(部分网站上也有整理,但不够完善): 1.仿真器电路原理图: 2.根据以上原理图将以上硬件搭好,再准备一条串口延长线和电路板连好,另 外我们再下载一个制作仿真器的软件SSTEasyIAP11F.exe 将*程序写入到 芯片,写完之后我们仿真器也就做好了。具体方法如下: 3.SSTEasyIAP11F.exe 软件的下载地址: https://www.doczj.com/doc/a917268758.html,/products/software_utils/softice/index.xhtml 本文来自: https://www.doczj.com/doc/a917268758.html, 原文网址:https://www.doczj.com/doc/a917268758.html,/mcu/51mcu/0084927.html https://www.doczj.com/doc/a917268758.html,/products/software_utils/softice/index.xhtml 4.解压后打开如下界面:
5.按下图操作,点击红色箭头: 6.得到如下界面,我们先选择仿真芯片为SST89E564,然后点击OK
7.得到下图后,我们点击确定,上电. 8.当出现下图红色箭头所示,表示连接成功.
9.接下来我们开始下载*程序,单击红色箭头的Download SoftICE 10.如下图所示,我们点击OK开始下载*程序
敬告用户 欢迎您成为我公司DSP仿真器产品的用户,在未阅读此敬告前请勿使用 我公司产品。如果您已开始使用,说明您已阅读并接受本敬告。 1. 本说明书中的资料如有更改,恕不另行通知。 2. 在相关法律所允许的最大范围内,本公司及其经销商对于因本产品 故障所造成的任何损失均不承担责任。不论损害的方式如何,本 公司及其经销商所赔付给您或其他责任人的责任总额,以您对本产品的实际已付为最高额。 3. 本公司及其经销商对所售产品自购买之日起三个月包换、一年保 修,其前提是您按说明书正常操作,对于非正常操作所致的损坏, 实行收费修理。 一、功能与特点 主要特点: 1、铝合金外壳,金属外壳抗外界电磁干扰能力更加先进,高档的外壳更显美观、专业 2、体积更小,有如一张名片大小 3、接口更加安全 4、性能更加卓越 5、速度较其他仿真器快一倍 · 采用高速版本USB2.0 标准接口,即插即用,传输速度可达480MB/S,向下兼容 USB1.1 主机; · 标准Jtag 仿真接口,不占用用户资源;特别接口安全保护设计,全面支持JTAG 接口 热插拔; · 支持Windows98/NT/2000/XP 操作系统; · 支持TI CCS2.X、支持CCS3.1 集成开发环境,支持c 语言和汇编语言; · 实现对F28x/F240x/F24x/F20x 的Flash 可靠编程; · 仿真速度快,支持RTDX 数据交换; · 不占用目标系统资源; · 自动适应目标板DSP 电压; · 设计独特,完全克服目标板掉电后造成的系统死机;完全解决目标板掉电后不能重 起CCS 的问题; · 可仿真调试TI 公司 TMS320C2000、TMS320C3000、TMS320C5000、TMS320C6000、3X、C4X、C5X、C8X 及OMAP、DM642 等全系列DSP 芯片。 · 支持多DSP 调试,一套开发系统可以对板上的多个DSP 芯片同时进行调试. · 对TI 的未来的芯片,只需升级软件便可轻松应用。 · 安装简单,运行稳定,价格低廉。 二、仿真DSP 范围 可仿真调试TI 公司: TMS320C2000 系列:F20X、F24X、F240X、F28XX 等 TMS320C3000 系列:VC33 等 TMS320C5000 系列:54X 、55X 等 TMS320C6000 系列:62XX/67XX、64X 等 OMAP:如1510、5910 等全系列TI DSP 芯片
项目一:焊接机器人 1.打开Robot studio软件,单击创建新建空工作站,同时保存一下,如下图所示; 2.选择ABB机器人模型IRB1600,单击添加,选择承重能力和到达距离,选择确定,如下图所示: 3.导入设备-tools-Binzel air 22,并拖动安装在机器人法兰盘上: 4.选择建模-固体-矩形体,设定长宽高,点击创建: 5.选择基本-机器人系统-从布局创建系统-下一步-下一步-完成; 6.控制器启动完成后,选择路径-创建一个空路径, 创建成功后,修改下方参数:moveJ , V1000,Z100 8.激活当前路径,选择机器人起点,单击示教指令 9.开启捕捉末端或角点,同时将机器人的移动模式设为手动线性,将机器人工具移到矩形体的一个角点上,单击示教指令,形成第一条路径,依次示教四个角点,形成路径,右击路径,选择查看机器人目标,可将机器人移动到当前位置 10.路径制作完成后,选择基本-同步到VC,在弹出的对话框中全部勾选,并点击确定,同步完成后选择仿真-仿真设定-将路径添加到主队列,选择应用--确定; 11.选择仿真录像,点击播放,开始仿真录像。 项目二:搬运机器人 1.新建空工作站--导入机器人IRB4600--选择最大承重能力,选择建模-固体-圆柱体,添加两个圆柱体,半径为200mm,高度分别为60mm和500mm,把其中一个作为工具添加到法兰盘上,同时导入两个设备Euro pallet如下图所示: 2.右击物体或在左侧布局窗口中右击物体名称,在下拉菜单中选择设定颜色来更改颜色: 3.根据布局创建机器人系统,细节与项目一相同,系统完全启动后,选择控制器-配置编辑器,在下拉菜单中选择I/O,在弹出窗口中新建Unit,细节如下图所示; 4.Unit新建完毕后,右击新建signal,新建do1和do2,细节如下图所示: 5.新建完毕后,重启控制器 6.重启完毕后,选择仿真-配置-事件管理器-添加事件,细节如下图所示: 7.事件添加完成后,开始创建路径啊,依次示教,机器人到达指定位置时,右击插入逻辑指令,如图所示: 8.路径创建完成后,同步到VC,仿真设定,然后进行仿真录像 项目三:叉车搬运 1.打开软件,新建空工作站,导入机器人模型IRB4600,选择最大承重能力,然后选择基本--导入几何体--浏览几何体--选择本地几何体--打开,如下图所示: 2.利用平移和旋转指令,将不同几何体按下图位置摆放整齐: 3.创建一个300*300*70的方体分别作为tool,将其创建为工具,具体操作如下图所示: 4.设定tool的本地原点为它的中心点,如下图所示: 5.选中tool,点击创建工具,将tool创建为工具,具体操作如下: 6.创建完成后将其安装在机器人法兰盘上,右击机器人选择显示机器人工作范围,可看到机器人最大到达距离,再次选择取消显示: 4.创建四个200*200*200的方体分别作为Box1~Box4,设定为不同颜色,将Box2~Box4设为不可见 5.布局结束,如下图所示:, 6.根据布局创建机器人系统,待系统启动完毕后,选择控制器--配置编辑器-新建Unit --新建signal,包括do1~do 15,如下图所示: 7.设置完成后,重启控制器,打开事件管理器,添加所需事件,包括显示对象,附加对象,提取对象,移动对象四类事件,具体如下:
80C51系列单片机 仿真器选购指南 (第二版) 广州周立功单片机发展有限公司2003年5月10日
目录 第一章为什么要使用仿真器 第二章仿真器中使用的技术 第三章国内仿真器的现状 第四章仿真器设计的误区 第五章如何挑选通用仿真器 第六章如何测试通用仿真器 第七章如何挑选采用HOOKS技术的仿真器
第一章 为什么要使用仿真器 1.1 仿真的概念 仿真的概念其实使用非常广 最终的含义就是使用可控可控 可控的手段来模仿真实的情况 在嵌入式系统的设计中仿真应用的范围主要集中在对程序的仿真上例如在单片机的开发过程中 程序的设计是最为重要的但也是难度最大的一种最简单和原始的开发流程是 编写程序 烧写芯片 验 证功能这种方法对于简单的小系统是可以对付的但在大系统中使用这种方法则是完全不可能的 1.2 仿真的种类 软件仿真这种方法主要是使用计算机软件来模拟运行实际的单片机运行因此仿真与硬件无关的系 统具有一定的优点用户不需要搭建硬件电路就可以对程序进行验证 特别适合于偏重算法的程序 软件 仿真的缺点是无法完全仿真与硬件相关的部分因此最终还要通过硬件仿真来完成最终的设计 硬件仿真使用附加的硬件来替代用户系统的单片机并完成单片机全部或大部分的功能使用了附加 硬件后用户就可以对程序的运行进行控制例如单步 全速 查看资源 断点等 硬件仿真是开发过程中 所必须的 1.3 为什么要使用仿真器? 在与一些有经验的工程师交谈中我们会发现有相当一部分工程师在开发中不使用或很少仿真器向 他们询问原因得到的回答是仿真器不可靠 但是他们是如何解决程序开发中遇到的问题呢 通过深入 的交流才明白他们是按照这样的方法来开发程序的 (1) 根据自己的设计建立一个符合要求的硬件平台如果该平台涉及的程序比较复杂还要搭建一个 人机交流的通道人机交流通道可能是一个简单的发光二极管 蜂鸣器 复杂的可能是串口通讯口 LCD 显示屏 (2) 写一个最简单的程序例如只是将发光二极管连续的闪烁程序编译后烧写到单片机芯片中验证硬件平台是否工作正常 (3) 硬件平台正常工作后编写系统最低层的驱动程序 每次程序更改后都重新烧写单片机芯片验证 如果在程序验证中遇到问题则可能在程序中加入一些调试手段例如通过串口发送一些信息到PC 端的 超级终端上 用于了解程序的运行情况 (4) 系统低层驱动程序完成后再编写用户框架程序由于这部分已经不涉及到硬件部分所以程序中的问题用户一般能够发现 但是更多的调查表明使用以上方法的工程师总的看来所设计的程序不是很庞大或很复杂因为在做简单的项目时 我们可以通过一个发光二极管就可以表达出内部的信息 如果程序复杂可能需要更多的 信息来表示内部的状态 这样可能就需要串口协助调试 如果程序更复杂 硬件更多 实时性更强 那工 程师就要更多的增强调试手段串口可能就不能满足了 需要类似于断点的功能因为我想知道在某一个 时刻单片机内部的状态究竟是怎样 如果用户程序的修改非常频繁可能一次又一次地的烧写芯片占用的时间就很多这时用户就会想能下载程序并运行的装置 到这里您会看到随着用户要求的越来越高调试装置已经越来越象一个通用的仿真器了因此我 们的建议是不要回避使用仿真器 因为使用仿真器能提高您的开发速度