
Elementary photogrammetry
双像解析摄影测量
立体观察(视差(空间前方交会方法(5?Copyright Reserved A
S 1
S 2
p 1
p 2
l 1
l 2
同名光线:同一地面点发出的两条光线
同名像点:同名光线在左右像片上的构像
同名核线:核面与左右像片面的交线
核面:摄影基线与某一地面点组成的平面
摄影基线:相邻两摄站的连线
a 1a 2
6
地面点的同名像点总对于同名点的搜索可
9
?Copyright Reserved
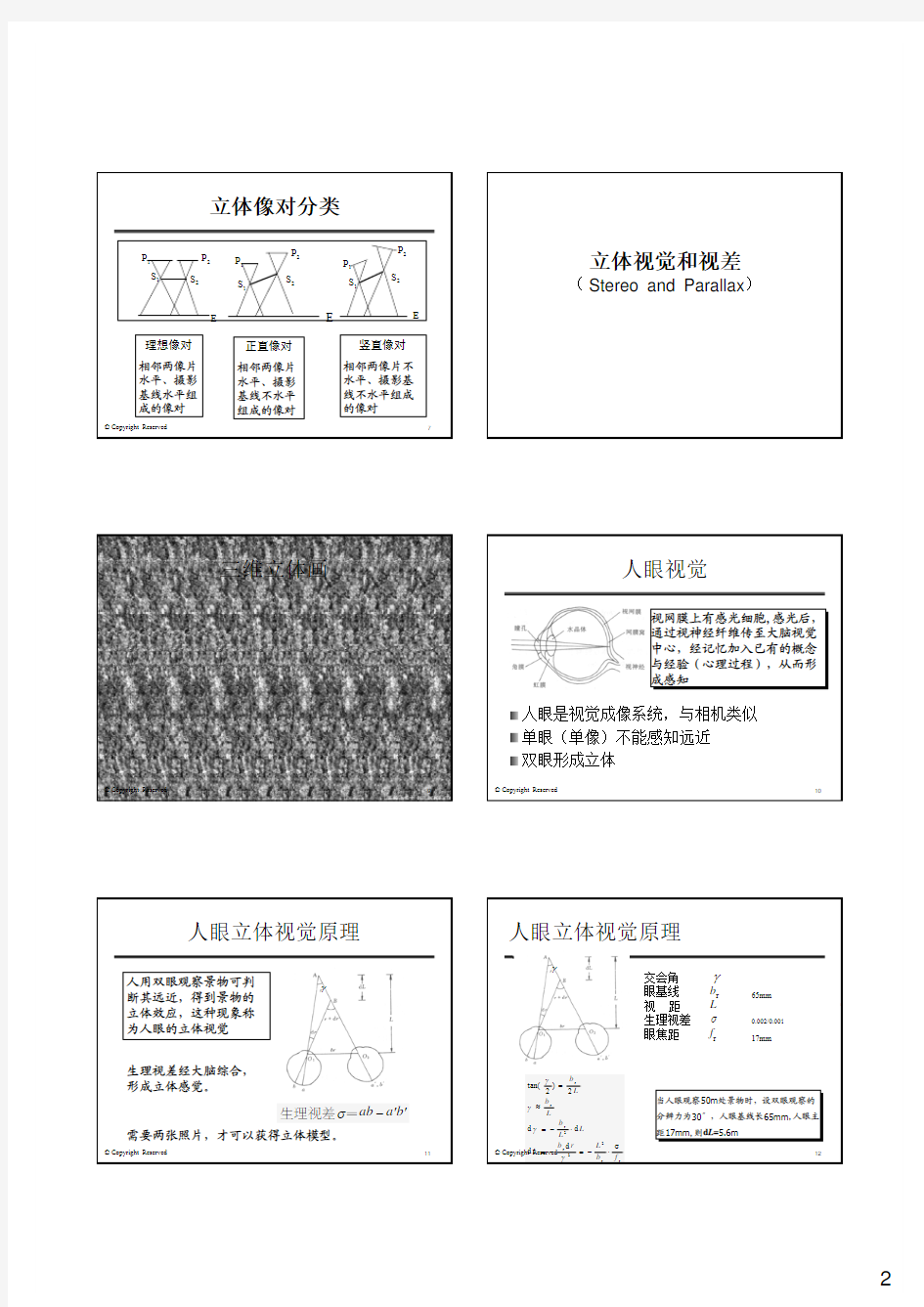
三维立体画人眼是视觉成像系统,与相机类似单眼(单像)不能感知远近双眼形成立体
视网膜上有感光细胞,感光后,通过视神经纤维传至大脑视觉中心,经记忆加入已有的概念与经验(心理过程),从而形成感知
γ
γ
空间景物在底片上构像人眼观察相片产生生理视差重建空间景物的立体视觉为什么要求像片有60%从不同位置获取目标的立体像对
16
?Copyright Reserved 三维立体画
17?Copyright Reserved 三维立体画18
?Copyright Reserved 三维立体画
在一个桥架上安置两个相同的简单透镜
20左右像片的影像叠映在同一个承影面上,
21
可以分别对左右像片进行调焦、亮度调节及必要旋转,观
像片可在两个相互垂直方向共同移动,也可一张像片相对
立体量测原理
定测标动测标26
模拟摄影测量
解析摄影测量
接口?计算机
数字摄影测量
左右像片同名像点的坐标量测值为(x a ,y a )左右视差p =x a –x a ’上下视差q = Steko 1818 型立体坐标量测仪
手轮
Y 手轮
上下视差环
上下视差(q )读数鼓
左右视差(Copyright Reserved
PSK-2精密立体坐标量测仪
Copyright Reserved
BC2解析测图仪
数字摄影测量工作站
32
?Copyright Reserved
34
Parallax
=40-(-30)=70mm =42-(-32)=74mm
Intersection
(立体像对的前方交会)
Intersection
双像解析摄影测量
如何用数学的方法,建立地面的立体模型,获得地面点的空间坐标
a 1(x
1
,y
1
)
A(X,Y,Z)a
2
(x
2
,y
2
)
S
2
f p
B Z f p B Z Z y p B
Y y p B Y Y x p B
B X x p B X X S S A S S A S S A ?=?=+=+=++=+=212
1112
11100121212=?==?==?=s s Z s s Y s s X Z Z B Y Y B B X X B p
B N N =
=21212
1=?==y y q y y ????
?
??????=??????????????
?
??????=??????????f y x Z Y X f y x Z Y X 2222211111,
双像解析摄影测量
解析法处理立体像对的三种方法:
Summary
双像解析摄影测量
立体观察(视差(空间前方交会方法(
1、摄影测量对航摄资料有哪些基本要求? 答:1)影像的色调要求影像清晰,色调一致,反差适中,像片上不应有妨碍测图的阴影。 2)像片重叠 同一航线上要求两相邻像片应有一定的重叠,称航向重叠。航向重叠:60% ~ 65% ,最小不应小于53%;相邻航线间也应有足够的重叠称旁向重叠。旁向重 叠:30% ~ 40% 最小不得小于15% 3)像片倾角在摄影瞬间摄影机轴发生了倾斜,摄影机轴与铅直方向的夹角称为相片倾角,不大于2°,最大不超过3°。 4)航线弯曲受技术和自然条件限制,飞机往往不能按预定航线飞行而产生弯曲,造成漏摄或旁向重叠过小从而影像内业成图。一般要求航摄最大偏距与全航线长之比不大于3%。 5)像片旋角相邻像片的主点连线与像幅沿航线方向两框标连线间的夹角称像片旋角,一般要求像片旋角不超过6°,最大不超过8°。 2、什么是像片重叠?为什么要求相邻像片之间及航线之间的像片要有一定的重叠?答:两张相邻的像片之间重叠的部分叫像片重叠为了满足测图的需要,在同一航线上,相邻两像片应有一定范围的重叠,称为航向重叠。相邻航线也应有足够的重叠,称为旁向重叠。 3、摄影测量常用哪些坐标系统,各坐标又是如何定义的? 像方坐标系:像平面坐标系、像空间坐标系、像空间辅助坐标系;像平面坐标系:是以像主点为原点的右手平面坐标系。 像空间坐标系:以摄影中心S为坐标原点,x、y轴与像平面坐标系的x、y轴平行,z轴与光轴重合,形成像空间右手指教坐标系S-xyz。 像空间辅助坐标系:像点坐标可以直接从像片上量取获得,而各个像片的像空间坐标是不统一的,给计算带来了困难,就需要建立统一的坐标系,于是有了像空间辅助在坐标系。有三种取法:1. 取u、v、w轴系分别平行于地面摄影测量坐标系D-XYZ,这样同一像点a在像空间坐标系坐标为x,y,z = (-f),而在像空间辅助坐标系中的坐标为u,v,w;2. 是以每条航线第一张像片的像空间坐标系作为像空间辅助坐标系;3. 以每个相片对的左像片摄影中心为坐标原点,摄影基线方向为u轴,以摄影基线及左片光轴构成的平面作为uw平面,过原点且垂直于uw平面(左核面)的轴为v构成右手直角坐标系。 物方坐标系:地面测量坐标系、地面摄影测量坐标系; 地面测量坐标系:高斯-克吕格3度或6度带投影的平面直角坐标系与定义的从某一基准面量起的高程两者组合而成的空间左手坐标系 地面摄影测量坐标系:地面测量坐标系是左手系,像空间辅助坐标系是右手系,给地面点由像空间辅助坐标系转换到地面测量坐标系带来困难,为此要建立一个过渡性坐标系,称为地面摄影测量坐标系。原点在测区内某一地面点上,X轴大致与航向一致的水平方向,Y轴与X轴正交,轴沿铅垂方向,构成右手直角坐标系。
摄影测量与遥感 一、单项选择题(每题的备选答案中只有一个最符合题意,不答或答错不得分)1.目前,主流的常规航空摄影机的像幅为(B )。 A. 18cm×18cm B. 23cm×23cm C. 36cm×36cm D. 46cm×46cm 2.航摄仪有效使用面积内镜头分辨率的要求(B)。 A. 每毫米内不少于20线对 B. 每毫米内不少于25线对 C. 每毫米内不少于30线对 D. 每毫米内不少于40线对 3.下列关于航空摄影时飞行质量的要求,叙述错误的是(B)。 A. 航向重叠度一般应为60%-65%;个别最大不应大于75%,最小不应小于56% B. 像片倾斜角一般不大于3°,个别最大不大于5° C. 航摄比例尺越大,像片旋角的允许值就越大,但一般以不超过8°为宜 D. 航线弯曲度一般不大于3% 4.同一条航线内相邻像片之间的影像重叠称为(A)重叠。 A. 航向 B. 旁向 C. 水平 D. 垂直 5.相邻航线相邻像片之间的影像重叠称为(B)重叠。 A. 航向 B. 旁向 C. 水平 D. 垂直 6.航摄像片上一线段与地面上相应线段的水平距离之比称为(C)比例尺。 A. 地形图 B. 测图 C. 摄影 D. 制图 7.框幅式航空摄影属于(D)投影成像。 A. 正射 B. 垂直 C. 斜距 D. 中心 8.当成图比例尺为1:10000时,应选择的航摄比例尺为(A) A. 1:20 000~1:40 000 B. 1:10 000~1:20 000 C. 1:25 000~1:60 000 D. 1:7000~1:14 000 9.下列各项中,关于航摄分区划分的原则叙述错误的是(A)。 A. 分区内的地形高差不得大于三分之一航高 B. 当地面高差突变,地形特征差别显著时,可以破图幅划分航摄分区 C. 在地形高差许可且能够确保航线的直线性的情况下,航摄分区的跨度应尽量划大 D. 分区界线应与图廓线相一致 10.一张航摄像片有(B)个内方位元素。 A. 2 B. 3 C. 4 D. 6 11.一张航摄像片有(D )个外方位元素。 A. 2 B. 3 C. 4 D. 6 12.航片上的投影差是由(A )引起的像点位移。 A. 地形起伏 B. 像片倾斜 C. 摄影姿态 D. 地球曲率 13.将一个重叠向内的立体像对的左右像片对调后,观测到的是(B )。 A. 正立体 B. 负立体
一、名词解释: 遥感2、遥感技术3、电磁波4、电磁波谱5、大气窗口6、影响匹配7、光谱反射率8、光谱反射特性曲线9、遥感平台10、遥感传感器11、数字影像12、空间域图像13、频率域图像14、图像采样15几何变形16、几何校正17、图像判读18、大气校正19、图像增强20、图像直方图21遥感图像判读22、监督法分类23、非监督法分类 二、回答问题 怎样才能将光学影像变成数字影像。 简述遥感数字影像增强处理的目的,例举一种增强处理方法 何为传感器的空间分辨率、辐射分辨率、光谱分辨率? 叙述监督分类与非监督分类的区别。 遥感图像处理软件的基本功能有哪些? 遥感图像目视判读的依据有哪些,有哪些影响因素? 航测外业主要包括哪些工作? 航空摄影的投影与地形图有何不同? 像主点与像片主距概念 光学和机械框标及作用 数字影像分辨率是什么? 摄影机检校要求与内容? 航空摄影的基本要求? 航空摄影质量检查与成果提交内容? 什么是基于核线的一维影像匹配 什么是投影差? 分区摄影基准面的高度是如何划分的? 摄影季节和航摄时间的选择应该注意什么问题? 航片比例尺有什么特点? 双向空间后发交会-前方交会解求地面点坐标的步骤? 连续法相对定向元素和单独像对相对定向元素是什么? 对定向元素有哪几个? 什么是立体像对的相对定向和绝对定向? 摄影测量坐标系分类 人造立体视觉的条件和类型 什么是视模型 左右视差和上下视差的概念 分像的方法 什么是立体像对 前方交会计算地面点的步骤 绝对定向至少需要几个地面控制点 像对相对定向需要地面控制点吗? 航测立体测图的方法有哪些? 模拟法立体测图的作业过程: 模拟法立体测图的自我检查内容包括那些? 遥感图像的目视解译方法 我们实验的遥感图像辐射增强处理有那些内容? 为什要对图像做几何校正?
摄影测量与遥感技术 作者:林青涛 20世纪60年代以来,由于航天技术、计算机技术和空间探测技术及地面处理技术的发展,产生了一门新的学科——遥感技术。所谓遥感就是在远离目标的地方,运用传感器将来自物体的电磁波信号记录下来并经处理后,用来测定和识别目标的性质和空间分布。从广义上说,航空摄影是遥感技术的一种手段,而遥感技术也正是在航空摄影的基础上发展起来的。 一、摄影测量与遥感技术概念 摄影测量与遥感学科隶属于地球空间信息科学的范畴,它是利用非接触成像和其他传感器对地球表面及环境、其他目标或过程获取可靠的信息,并进行记录、量测、分析和表达的科学与技术。摄影测量与遥感的主要特点是在像片上进行量测和解译,无需接触物体本身,因而很少受自然和地理条件的限制,而且可摄得瞬间的动态物体影像。二、摄影测量与遥感技术的发展 1、摄影测量及其发展 摄影测量的基本含义是基于像片的量测和解译,它是利用光学或数码摄影机摄影得到的影像,研究和确定被摄影物的形状、大小、位置、性质和相互关系的一门科学和技术。其内容涉及被摄影物的影像获取方法,影像信息的记录和存储方法,基于单张或多张像片的信息提取方法,数据的处理和传输,产品的表达与应用等方面的理论、设备和技术。 摄影测量的特点之一是在影像上进行量测和解译,无需接触被测目标物体本身,因而很少受自然和环境条件的限制,而且各种类型影像均是客观目标物体的真实反映,影像信息丰富、逼真,人们可以从中获得被研究目标物体的大量几何和物理信息。 到目前为止,摄影测量已有近170年的发展历史了。概括而言,摄影测量经历了模拟法、解析法和数字化三个发展阶段。表1列出了摄影测量三个发展阶段的主要特点。 如果说从模拟摄影测量到解析摄影测量到解析摄影测量的发展是一次技术的进步,那么从解析摄影测量到数字摄影测量的发展则是一场技术的革命。数字摄影测量与模拟、解析摄影测量的最大区别在于:它处理的原理信息不仅可以是航空像片经扫描得到的数字化影像或由数字传感器直接得到的数字影像,其产品的数字形式,更主要的是它最终以计算机视觉代替人眼的立体观测,因而它所使用的仪器最终只有通用的计算机及其相应的外部设备,故而是一种计算机视觉的方法。 2、遥感及其发展
《摄影测量原理》 实 验 报 告 院系: 班级: 姓名: 指导教师: 实验一预备知识 一、实验目得 1、了解4d得基本概念。 2、了解VirtuoZo NT系统得运行环境及软件模块得操作特点。 3、了解实习工作流程,从而能对4d产品生产实习有个整体概念。 二、实验内容 1、熟悉4D得基本概念。 数字高程模型(缩写DEM)就是在某一投影平面(如高斯投影平面)上规则格网点得平面坐标(X,Y)及高程(Z)得数据集。 数字正射影像图(缩写DOM)就是利用数字高程模型(DEM)对经扫描处理得数字化航空像片,经逐像元进行投影差改正、镶嵌,按国家基本比例尺地形图图幅范围剪裁生成得数字正射影像数据集。它就是同时具有地图几何精度与影像特征得图像,具有精度高、信息丰富、直观真实等优点。 数字线划地图(缩写DLG)就是现有地形图要素得矢量数据集,保存各要素间得空间关系与相关得属性信息,全面地描述地表目标。 数字栅格地图(缩写DRG)就是现有纸质地形图经计算机处理后得到得栅格数据文件。每一幅地形图在扫描数字化后,经几何纠正,并进行内容更新与数据压缩处理,彩色地形图还应经色彩校正,使每幅图像得色彩基本一致。数字栅格地图在内容上、几何精度与色彩上与国家基本比例尺地形图保持一致。 2、了解VirtuoZo NT系统,熟悉系统得运行环境及配置,主要软件模块以及作业方式等,了解系统目录。 3、系统启动。 4、4d产品制作流程
根据VirtuoZo制作4d产品得基本工作流程如下: 三、实验方 法与步骤 通过阅读 实验指导书, 对制作DE M、DOM流 程以及基本知 识进行足够得 了解。 四、实验结 果 五、实验心得与体会 通过学习摄影测量这门课,我已经了解4D得一些知识,现在又做了这次实验,使我对4D产品又加深了了解,此外,我也接触到了一个软件VirtuoZo NT,我开始就将这个软件进行练习,不断得去了解这个软件,通过实习指导书与视频,我对这个软件得又了更进一步得了解,这个软件就是做摄影测量实验得基础,在这个界面里能够做出一个完美得数字模型,能够将整个城市或者整个地区得影像制作成地形图与正摄投影图,能够使人们更加直观得瞧出地区得整体景象,我们能够用它制作4D产品,我要理解这个软件得制作流程,能够更好得做出产品。
摄影测量与遥感专业攻读博士生学位培养方案 (专业代码:081602 授工学博士学位) 一、培养目标 本专业培养具有国际学术视野,富有创新思维和创新能力,主动适应国家经济社会建设发展需要的高层次拔尖创新人才,具体要求是: 1. 具有坚定正确的政治方向;热爱祖国,热爱人民,遵纪守法;诚信公正,有社会责任感; 具有良好的道德品质与学术修养。 2. 掌握所在学科领域坚实宽广的基础理论和系统深入的专门知识;熟练地掌握一门外语,使用和阅读本专业文献,进行学术交流;有独立从事学术研究工作的能力;并在某一方向上做深入的研究,取得创造性的成果。 3. 身心健康。 二、研究方向 1. 图像信息获取、处理与应用 研究图像信息获取、数字图像的处理、分析与识别的算法、地形图扫描影像的自动识别技术、遥感影像目标的自动提取技术、影像压缩与编码技术、多种影像信息的融合技术、小波理论、分形理论及人工神经网络等理论和图像工程应用。 2. 数字摄影测量 主要研究多传感器集成的近景、航空、航天和行星数字摄影测量的理论和方法以及数字摄影测量系统的开发。主要研究:基于摄影几何的摄影测量、三线阵CCD影像处理、激光雷达数据处理、SAR/InSAR数据处理、机载/车载测图系统、GPS辅助空中三角测量、POS理论与方法、图像处理与信息提取、三维重建、高空间分辨率遥感卫星影像几何处理等。 3. 计算机视觉 研究图像匹配与配准、三维目标的自动重建、三维深度信息的恢复、序列图像的处理与分析、工业部件的自动测量与识别、汽车自动导航、虚拟现实、机器学习和视频分析等理论与方法。 4. 遥感技术与应用 主要研究可见光、多光谱、高光谱、雷达遥感影像的分析、处理、目标识别方法,多元遥感影像的综合分析方法、时序遥感影像的分析等理论与方法,探讨测绘、环境、地质、林业等领域的应用关键问题。 5. 定量遥感 主要研究大气、水体、陆地定量遥感相关的辐射定标、大气校正、地物目标光谱特性、
Lesson 60 The future 卜算未来 Does what Madam Bellinsky said come true? At a village fair, I decided to visit a fortune-teller called Madam Bellinsky .I went into her tent and she told me to sit down. After I had given her some money, she looked into a crystal ball and said:’A relation of yours is coming to see you. She will be arriving this evening and intends to stay for a few days. The moment you leave this tent, you will get a big surprise. A woman you know well will rush towards you. She will speak to you and then she will lead you away from this place. That is all.’As soon as I went outside, I forgot all about Madam Bbllinsky because my wife hurried towards me. ‘Where have you been hiding?’ she asked impatiently. ‘Your sister will be here in less than an hour and we must be at the station to meet her. We are late already.’ As she walked away, I followed her out lf the fair.
一.名词解释 1.摄影比例尺 严格讲,摄影比例尺是指航摄像片上一线段为J 与地向上相应线段的水干距L 之比。由于影像片有倾角,地形有起伏,所以摄影比例尺在像片上处处不相等。一般指的摄影比例尺,是把摄影像片当作水平像片,地面取平均高程.这时像片上的一线段l 与地面上相应线段的水平距L 之比,称为摄影比例尺1/m 2.像片倾角 空中摄影采用竖直摄影方式,即摄影瞬间摄影机的主光轴近似与地面垂直,它偏离铅垂线的夹角应小于3D ,夹角称为像片倾角。 3.航向重叠 同一条航线内相邻像片之间的影像重叠称为航向重叠,一般要求在60%以上。4.旁向重叠 相邻航线的重叠称为旁向重叠,重叠度要求在24%以上 5.摄影基线 控制像片重叠度时,是将飞机视为匀速运动,每隔一定空间距离拍摄一张像片,摄站的间距称为空间摄影基线B 。 6.像平面坐标系 像平面坐标系用以表示像点在像平面上的位置,通常采用右手坐标系,x ,y 轴的选择按需要而定.在解析和数字摄影测量中,常根据框标来确定像平面坐标系,称为像框标坐标系。 7.像主点 相机主光轴与像平面的交点 8.内方位元素 内方位元素是表示摄影中心与像片之间相关位置的参数,包括三个参数。即摄影中心到像片的垂距(主距)f 及像主点o 在像框标坐标系中的坐标0 0,y x 9.外方位元素 外方位元素是表示摄影中心和像片在地面坐标系中的位置和姿态的参数,一张像片的外方位元素包括六个参数,其中有三个是直线元素,用于描述摄影中心的空间坐标值;另外三个是角元素,用于表达像片面的空间姿态。 10.空间后方交会 已知像片的内方位元素以及至少三个地面点坐标并量测出相应的像点坐标,则可根据共线方程列出至少六个方程式,解求出像片六个外方位元素,称为空间后方交会。 11.中心投影变换
第一章 1、传统摄影测量学定义:摄影测量学是利用光学摄影机获取的像片,经过处理以获取被摄物体的形状、大小、位置、特性及其相互关系的一门学科。 2、摄影测量与遥感的定义:摄影测量与遥感是从非接触成像及其他传感器系统,通过记录、量测、分析与表达等处理,获取地球及其环境和其他物体可靠信息的工艺、科学与技术。(其中,摄影测量侧重于提取几何信息,遥感侧重于提取物理信息。也就是说,摄影测量是从非接触成像系统,通过记录、量测、分析与表达等处理,获取地球及其环境和其它物体的几何、属性等可靠信息的工艺、科学与技术) 3、摄影测量的分类 ①按距离远近:航天摄影测量、航空摄影测量、地面摄影测量、近景摄影测量、显微摄影测量 ②按用途:地形摄影测量、非地形摄影测量 ③按处理手段:模拟摄影测量、解析摄影测量、数字摄影测量 4、地形摄影测量的主要任务:测绘各种比例尺的地形图及城镇、农业、林业、地质、交通、工程、资源与规划等部门需要的各种专题图,建立地形数据库,为各种地理信息系统提供三维基础数据 5、非地形摄影测量的主要任务:用于工业、建筑、考古、医学、生物、体育、变形观测、事故调查、公安侦破与军事侦察等方面 6、数字地图:DLG(数字线划地图)、DOM(数字正射影像)、DEM(数字高程模型)、DRG (数字栅格地图) 7、摄影测量的特点: ①无需接触物体本身获得被摄物体信息(较少受到周围环境与条件的限制) ②由二维影像重建三维目标 ③面采集数据方式 ④同时提取物体的几何与物理特性 8、摄影测量学的三个发展阶段:模拟摄影测量、解析摄影测量、数字摄影测量 9、模拟摄影测量:利用光学/机械投影方法实现摄影过程的反转,用两个/多个投影器模拟摄影机摄影时的位置和姿态构成与实际地形表面成比例的几何模型,通过对该模型的量测得到地形图和各种专题图 10、模拟摄影测量的特征: ①形成了较完整的摄影测量学的基本概念 ②依据相片变为地形图的作业过程及需要,生产了大量复杂、昂贵的摄影测量仪器 ③根据仪器及测量原理的不同,形成了较完整的相片变为地形图的测绘方法 11、模拟立体测图仪分为:光学投影、光学-机械投影、机械投影 12、1957年,海拉瓦博士提出解析测图仪的思想,标志着解析摄影测量的开始 13、解析摄影测量:以电子计算机为主要手段,通过对摄影像片的量测和解析计算来研究和确定被摄物体的形状、大小、位置、性质及其相互关系,并提供各种摄影测量产品的一门科学。 14、解析测图仪与模拟测图仪的主要区别:前者使用的是数字投影方式,后者使用的是模拟的物理投影方式。 仪器设计和结构上的不同:前者是由计算机控制的坐标量测系统,后者使用纯光学、机械型的模拟测图装置 操作方式的不同:前者是计算机辅助的人工操作,后者是完全手工操作
摄影测量与遥感 1摄影测量 基本原理 1.1.1摄影测量的定义 摄影测量学是通过影像研究信息的获取、处理、提取和成果表达的一门信息科学。1988年ISPRS在日本京都第16届大会上对摄影测量与遥感的定义:摄影测量与遥感是对非接触传感器系统获得的影像及其数字表达进行记录、量测和解译,从而获得自然物体和环境的可靠信息的一门工艺、科学和技术。 摄影测量学可从不同角度进行分类。按摄影距离的远近分,可分为航天摄影测量、航空摄影测量、地面摄影测量、近景摄影测量和显微摄影测量。按用途分类,有地形摄影测量和非地形摄影测量。按处理的技术手段分,有模拟摄影测量、解析摄影测量和数字摄影测量。 1.1.2摄影测量学发展的三个阶段 模拟法摄影测量(1851-1970)其基本原理是利用光学/机械投影方法实现摄影过程的反转,用两个/多个投影器,模拟摄影机摄影时的位置和姿态,构成与实际地形表面成比例的几何模型,通过对该模型的量测得到地形图和各种专题图。 解析法摄影测量(1950-1980)以电子计算机为主要手段,通过对摄影像片的量测和解析计算方法的交会方式,来研究和确定被摄物体的形状、大小、位置、性质及其相互关系,并提供各种摄影测量产品的一门科学。 数字摄影测量(1970-现在)基于摄影测量的基本原理,通过对所获取的数字/数字化影像进行处理,自动(半自动)提取被摄对象用数字方式表达的几何与物理信息,从而获得各种形式的数字产品和目视化产品。
1.1.3单张航摄像片解析 航摄影像是航空摄影测量的原始资料。像片解析就是用数学分析的方法,研究被摄景物在航摄像片上的成像规律,像片上影像与所摄物体之间的数学关系,从而建立像点与物点的坐标关系式。像片解析是摄影测量的理论基础。 为了由像点反求物点,必须知道摄影时摄影物镜或投影中心、像片与地面三者之间的相关位置。而确定它们之间相关位置的参数称为像片的方位元素,像片的方位元素分为内方位元素和外方为元素两部分。内元素3个:确定摄影物镜后节点与像片之间相互位置关系的参数(x0,y0,f),可恢复摄影光束。外方位元素6个:3个直线元素描述摄影中心在地面空间直角坐标系中的位置(Xs、Ys、Zs),3个角元素描述像片在摄影瞬间的空间姿态(航向倾角φ、像片旋角κ、旁向倾角ω)。 为了研究像点与地面相应点的数学关系,必须建立中心投影的构像方程。下式为一般地区中心投影的构像方程,由于这个方程推导中像点、投影中心和地面点三点共线,故又称共线方程式,是摄影测量中重要的基本公式之一。 图1-1 共线方程式 利用航摄像片上三个以上像点坐标和对应地面点坐标,计算像片外方位元素的工作,称为单张像片的空间后方交会。根据计算的结果,就可以将按中心投影规律获取的摄影比例尺航摄像片转换成以测图比例尺表示的正射投影地形图。 1.1.4双像解析摄影测量 单张像片只能研究物体的平面位置,而在两个不同摄站对同一地区摄取具有重叠的一个立体像对,则可构成立体模型来解求地面物体的空间位置。按照立体像对与被摄物体的几何关系,以数学计算方式,通过计算机解求被摄物体的三维空间坐标,称为双像解析摄影测量。
当代摄影测量作业 1.摄影测量的“3个”基本关系?各有什么难点? 摄影测量的射影空间中的基本几何关系式包括:物像之间的共线条件关系式、物像之间的直接关系式、像像之间的共面条件关系式。 (1)射影空间中物像之间的共线条件方程式, 在欧氏空间下的共线条件方程是一个非线性方程。同时在实践中广泛采用它的主要困难在于,这种方法将导致庞大的法方程系。 (2)物像之间的直接关系式 如果再把物方射影坐标系的单位点E和另外一个未知点a的射影坐标以及它们所对应的像点坐标代入式中,并整理得到矩阵形式为: 该关系式建立了物点与像点射影坐标之间的直接关系,它不包含任何中间参数,在求解物点的摄影坐标时非常有用。 (3)像像之间的共面条件关系式 利用射影坐标与欧氏坐标之间的转换关系,把以上欧氏坐标用射影坐标代换,并经过整理得:
该形式就是射影空间中同名点之间的共面条件关系式。 2.大幅面航空数码相机制造有什么难点?现有的解决方案有哪些? 各有什么优缺点? 制造大幅面阵航空数码相机最主要的困难是大幅面的面阵列CCD的制造比较困难,对于面阵 CCD 传感器,由于受生产技术的制约——CCD 芯片的面积越大,成本越高,出现“坏点”的机率就会越大,制造较大面积的 CCD 芯片存在的难点是“坏点”问题。随着 CCD 面积的增大,这些因素很大程度上制约了大面阵 CCD 图像传感器的发展。所以生产像幅为230 X 230 mm2的大幅面的面阵CCD相机还有困难。 解决方的方案有:面阵CCD拼接 面阵CCD拼接的技术方案主要有两类:外拼接和内拼接。从成像视场的角度分析,外拼接主要是指外视场分光的方法,外视场分光是由多个光学系统组成,每个光学系统有一个或多个CCD器件独立成像,分别占据视场的一部分, 共同组成整个大视场。内拼接是指所有 CCD 共用一套镜头系统,其实现途径有两种:一种是 CCD 器件直接拼接,顾名思义就是 CCD 器件在机械上首尾搭接。另一种是通过光学系统分光的方法进行光学拼接。这种 CCD 拼接在实现形式上也有两种:光路分光和光束分光。光路分光是通过棱镜将光路分成多路,把镜头系统的一个像面分成独立的几个子像面,从而达到拼接的目的。光束分光是一种两次成像的分光系统,将第一次成像像面上的光束分成多束,再通过光纤分束或透镜分束等方法将各束光分别成像在第二像面上,从而达到分光的目的。由于普通 CCD 器件的光敏面以外的边缘以及引脚的影响,直接拼接时 CCD 器件之间会产生缝隙,实现难度比较大;虽然市场上已有一些可供拼接的CCD 器件出现,这些CCD 器件的引脚都做在一侧,光敏面以外的边缘也很小,但是直接拼接实现起来仍十分困难,无法达到无缝拼接的目的。 随着计算机和 CCD 技术的发展,航空数码相机必将成为高分辨率、高精度航空遥感以及无控制航测的主要技术手段,航空数字影像也必将成为大比例尺地理空间信息获取的重要数据源。随着数字航空遥感的进一步发展,航空数码相机必将在信息化测绘中发挥重要作用。 3.分析比较航空面阵、航空线阵、航天线阵空中三角测量的异同?
大学生毕业实习总结:摄影测量与遥感实习 摄影测量与遥感实习是摄影测量学和遥感技术相应用的综合实习课。本课程的任务是通过实习掌握摄影测量的原理、影像处理方法、成图方法,掌握遥感的信息获取、图像处理、分类判读及制图的方法和作业程序。从而更系统地掌握摄影测量与遥感技术。通过实习使我们更熟练地掌握摄影测量及遥感的原理,信息获取的途径,数字处理系统和应用处理方法。进一步巩固和深化理论知识,理论与实践相结合。培养我们的应用能力和创新能力、工作认真、实事求是、吃苦耐劳、团结协作的精神,为以后从事生产实践工作打下坚实的理论与实践相结合的综合素质基础。 通过一周的室内实习任务,最大的感触就是从新认识了摄影测量和遥感这门比较抽象的学课,以前在课堂上总觉得这是一门非常难懂也非常难学的课程,可是就在这周的室内收集资料实习的过程中我的想法突然改变了,其实摄影测量与遥感这门学科并没有所想的那么难懂和难学,只要我们愿意去学、去发现这门学科的奥秘我们还是非常容易掌握和理解的。开始接触是觉得它是我们所有学科中最抽象的,可是当我们把我们所学的理论知识和这次室内搜集资料的实习结合起来对比和深入研究后,才真正的发现这是一门多么有内涵和适应新时代的必要科目,很多情况下,对于大面积的测图我们都少不了对它的应用,同时在将来摄影测量和遥感也很有可能会取代我们所有传统的测图方法,真正的把它完全的应用到我们的所有调查土地资料中,
以见证它的最有效的作用。 由于我们学校大量缺少摄影测量和遥感这门学科的仪器和工具,所以学校把这次实习任务主要定为网上搜集有关这门学科的资料及书本上理论知识相结合系统的学习。虽然这方面的设备大量的缺乏,可是仍然没有撮箕到我们学习的良好心态,在这个过程中我们还是以自己的最大热情完全的投入到此次实习中。通过这次实习我们的收获很大,在很多情况下我们都得到了很多意外的收获,获益匪浅!不仅对书本上的理论知识有了通盘的理解,更重要的是从实践中检验了它的真理,了解了它的适应范围之广和作用之大,为我们以后从事工作而需要它打下了坚实的理论基础与实践经验。
摄影测量与遥感专业研究生培养方案 (专业代码:081602) 一、培养目标 本专业面向现代地理学及相关学科的地理信息技术应用领域,培养德才兼备,掌握坚实理论知识、技术方法及应用手段的摄影测量与遥感专业人才。具体体现在: 1.具备科学社会主义世界观,坚持四项基本原则,热爱母校、热爱祖国,奋发进取,德、智、体全面发展的高层次专业人才; 2.坚持真理,献身科学事业,具有高尚的科学职业道德、崇高的敬业精神、团结友爱的科学合作境界; 3.具备扎实的语言基础、数理基础、地学基础,具有较强的摄影测量与遥感方面的科学研究、技术开发、综合应用能力; 4.融宽广的知识、深厚的理论、全面的素质于一体,成为对社会有用的高素质的复合型人才。 二、研究方向 硕士阶段: 1.遥感机理、方法与应用 2.数字摄影测量 3.数字图像处理 4.虚拟地理环境技术 5.数字地球 三、招生对象 硕士阶段: 专业相同或相近的大学本科毕业生或优秀大专生(工作2年以上)。 1
博士阶段: 专业相同或相近的硕士生或优秀本科毕业生(工作6年以上)。 四、学习年限 一般为三年。 五、课程设置 硕士阶段: 2
注:A类课须全选,B类课不少于6个学分,C类课不少于6个学分,总学分不少于32学分,同等学力者和跨专业考生加选三门本科段专业主干课。 六、培养方式 1.课堂授课与讨论,包括多媒体和CAI手段的使用; 2.撰写读书报告; 3.学术交流,包括学术讲座、学术报告、学术会议等形式; 4.生产实践。 七、考核方式 1.课程考核:笔试、口试、读书报告等形式。 2.中期考核:在第3学期考核研究生的专业基础理论与技能、分析和解决问题的能力、创新能力、实验技能、综合素质,根据其成绩分别向提前攻博、进入硕士论文阶段和终止研究生学习三个方向分流。 八、学位论文 1.选题体现学科领域的前沿性和先进性; 2.做好论文开题报告; 3.结合学位论文发表学术成果; 4.论文在引用时必须注明出处,在论文最后列出所参考的文献资料。 九、答辩与学位授予 严格按照学校规定的论文评阅和答辩程序进行学位论文答辩与学位授予工作。 十、质量监测 全面实行中期考核,建立学位论文开题-预答辩-答辩制度,全面试行学位授予量化指标考核,建立研究生个人教学档案,毕业后进行不定期的追踪调查。 3
摄影测量(一) 一、填空题(20 分,每空 1 分) 1、摄影测量中常用的坐标系有、、、、 2、解求单张像片的外方位元素最少需要个点。 3、GPS辅助空中三角测量的作用是。 4、两个空间直角坐标系间的坐标变换最少需要个和个地面控制点。 5、摄影测量加密按平差范围可分为、和三种方法。 6、摄影测量的发展经历了、和三个阶段。 7、恢复立体像对左右像片的相互位置关系依据的是方程。 8、法方程消元的通式为Ni,i+1 = 。 二、名词解释(20 分,每个 4 分) 1、内部可靠性: 2、绝对定向元素: 3、像主点: 4、带状法方程系数矩阵的带宽: 5、自检校光束法区域网平差: 三、简答题(45 分,每题15分) 1、推导摄影中心点、像点与其对应物点三点位于一条直线上的共线条件方程,并简要叙述其在摄影测量中的主要用途。 2、像片外方位元素的作用是什么?用图示意以y 轴为主轴的航摄像片的外方位元素。 3、如果拥有一套POS系统,你打算如何用其快速确定地面点的三维坐标(简要叙述基本思想和具体解算过程)? 四、综合题(15 分) 设某区域由两条航线组成(如图 1 所示),试根据光束法区域网平差原理回答下列问题:① 当控制点无误差时,观测值个数n、未知数个数t 、多余观测数r ; ② 按最小带宽原则在图 a 中标出像片排列顺序号并求出带宽; ③ 在图 b 中绘出改化法方程系数矩阵结构图(保留像片外方位元素)。
摄影测量(二) 一、名词解释 1 摄影测量学 2 航向重叠 3 单像空间后方交会 4 相对行高 5 像片纠正 6 解析空中三角测量 7 透视平面旋转定律 8 外方位元素 9 核面 10 绝对定向元素 二、填空 1 摄影测量的基本问题,就是将 ________ 转换为 _______ 。 2 物体的色是随着 _________ 的光谱成分和物体对光谱成分固有不变的 ______ 、__________ 、和________ 的能力而定的。 3 人眼产生天然立体视觉的原因是由于 ________ 的存在。 4 相对定向完成的标志是 ________ 。 5 光束法区域网平差时,若像片按垂直于航带方向编号,则改化法方程系数阵带宽为______ 若按平行于航带方向编号,则带宽为_________ 。 三、简答题 1 两种常用的相对定向元素系统的特点及相对定向元素。 2 倾斜位移的特性。 3 单行带法相对定向后,为何要进行比例尺归化?为何进行? 4 独立模型法区域网平差基本思想。 5 何谓正形变换?有何特点? 四、论述题
872摄影测量与遥感综合考试大纲 一、考试组合 摄影测量与遥感综合包含摄影测量基础、数字图像处理、遥感原理与应用三个科目,任选两个科目,每个科目分数分别为75分,总分150分。 二、摄影测量基础部分考试大纲 主要内容及基本要求 1.摄影测量的基本概念和基础知识 主要内容:摄影测量的定义、任务、发展概况;摄影测量常用坐标系、成像模型等。 基本要求:掌握摄影测量学科的定义、基本任务、发展过程;熟悉摄影测量常用坐标系的建立、中心投影构像方程的建立。 2.单张航摄像片解析 主要内容:航摄像片上的特殊点线面、航摄片段内、外方位元素、空间直角坐标变换、航摄片的像点位移与比例尺、单张航片的空间后方交会。 基本要求:熟悉航空摄影中的基本几何关系、熟练掌握空间直角坐标变换、掌握单张航片的空间后方交会方法。 3.双像解析摄影测量 主要内容:航摄像对的立体观察与测量、双像解析摄影测量的任务与方法、立体像对的前方交会、双像解析计算的空间后交-前交方法、解析法相对定向、模型点坐标的计算、解析法绝对定向、光束法双像解析摄影测量、解析法空中三角测量。 基本要求:熟悉双像解析摄影测量的任务与方法、熟练掌握立体像对的前方交会、双像解析计算的空间后交-前交方法、解析法相对定向、解析法绝对定向、光束法双像解析摄影测量、解析法空中三角测量。 4.数字摄影测量 主要内容:基本概念,数字图像与影像重采样、基于灰度的影像相关、基于特征的影像匹配、同名核线的确定与核线相关。 基本要求:掌握数字摄影测量与模拟、解析摄影测量的区别与联系,熟练掌握基于灰度的影像相关方法、基于特征的影响匹配,掌握核线相关的方法。
5.测图原理及测图仪器 主要内容:立体测图方法、模拟法测图原理、模拟测图仪的结构与分类;解析测图方法、解析法测图原理、解析测图仪的结构与分类。 基本要求:掌握各种测图方法及仪器的原理。 6.数字高程模型及其应用 主要内容:基本概念,数据点的获取、预处理、存储,曲面的内插和逼近、曲线内插与逼近、等高线的绘制。 基本要求:数字高程模型的基本概念,数字高程模型的建立、数据点的获取及存储,曲面的内插和逼近、曲线内插与逼近、绘制等高线的方法。 三、数字图像处理部分考试大纲 复习内容及基本要求 主要内容包括三部分:第一部分是数字图像处理的基础;第二部分是数字图像增强处理的理论、方法和实例,包括空间域图像增强、频率域图像增强和形态学图像处理;第三部分是图像特征提取与分析的基本理论、方法和实例,包括图像分割、表示与描述和对象识别。 具体章节如下: 1、数字图像基础 内容:图像取样和量化、像素间的一些基本关系 要求:掌握图像取样和量化的概念,熟练掌握像素间的一些关系 重点:像素间的一些空间关系 2、空间域图像增强 内容:基本灰度变换、直方图处理、用算术/逻辑操作、空间滤波基础、平滑空 间滤波器、锐化空间滤波器; 要求:掌握图像空间增强的相关术语、图像灰度级变换方法、图像直方图的概 念和直方图均衡化算法。掌握图像的算术和逻辑操作方法,了解空间滤波基础, 掌握平滑空间滤波的基本概念和特点。掌握图像的一阶微分和二阶微分的典型 计算方法、锐化空间滤波的基本概念和特点。 重点:直方图概念;平滑空间滤波器;图像一阶微分、二阶微分的概念和计算 方法;拉普拉斯算子和典型梯度增强算法 3、频率域图像增强 内容:傅立叶变换概念、频率域滤波的基本步骤、低通和高通滤波器。 要求:掌握二维傅立叶离散变换及反变换的定义,掌握频率域滤波器的概念、 性质和计算步骤,掌握空间域滤波和频率域滤波的对应关系。掌握低通和高通 滤波器的概念和性质。 重点:二维离散傅立叶变换和反变换;频率域滤波的概念和计算步骤;高斯低
1.什么是摄影测量学,摄影测量发展的三个阶段 摄影测量学是对研究的物体进行摄影,测量和解译所获得的影像,获取被摄物体的几何信息和物理信息的一门科学。三个阶段:模拟、解析、数字摄影测量。 2.根据成图的需要,规定了摄影比例尺后,如何选择航空摄影机与航摄高度?答:采用特宽角航摄机,航高值就小,采用常角或窄角航摄机,航高值就大。(航高的大小将决定飞机实际升限和最小安全高度的限制,另外,测图的高程测定精度与航高有关(高程中误差与航高成正比))大比例尺单像测图,应选用常角或窄角航摄机,小比例尺立体测图应选用特宽角航摄机。 3.什么是航摄像片的内外方位元素,各有何作用? 答:内方位元素包括三个参数,即摄影中心S到像片的垂距(主距)f及像主点o在像框标坐标系中的坐标00,y x,用其来恢复摄影光束。确定摄影光束在摄影瞬间的空间位置和姿态的参数,称为外方位元素,一张的外方位元素包括六个参数,其中有三个是直线元素,用于描述摄影中心的空问坐标值;另外三个是角元素,用于表达像片面的空间姿态。 4.摄影测量中常用的坐标系有哪些,各有何作用? 答:摄影测量中常用的坐标系有两大类。一类是用于描述像点的位置,称为像方空间坐标系;另——类是用于描述地面点的位置.称为物方空间坐标系。 (1)像方空间坐标系①像平面坐标系像平面坐标系用以表示像点在像平面上的位置,通常采用右手坐标系,xy轴的选择按需要而定.在解析和数字摄影测量中,常根据框标来确定像平面坐标系,称为像框标坐标系。②像空间坐标系为了便于进行空间坐标的变换,需要建立起描述像点在像空间位置的坐标系,即像空间坐标系。以摄影中心S为坐标原点,xy,轴与像平面坐标系的xy轴平行,z轴与主光轴重合,形成像空间右手直角坐标系s-xyz③像空间辅助坐标系像点的像空间坐标可直接以像平面坐标求得,但这种坐标的待点是每张像片的像空间坐标系不统一,这给计算带来困难。为此,需要建立一种相对统一的坐标系.称为像空间辅助坐标系,用s-XYZ表示。此坐标系的原点仍选在摄影中心S坐标轴系的选择视需要而定。 (2)物方空间坐标系①摄影测量坐标系将像空间辅助坐标系XYZ S?沿着Z轴反方向平移至地面点P,得到的坐标系称为摄影测量坐标系②地面测量坐标系地面测量坐标系通常指地图投影坐标系,也就是国家测图所采用的高斯—克吕格3带或6带投影的平面直角坐标系和高程系,两者组成的空间直角坐标系是左手系。③地面摄影测量坐标系由于摄影测量坐标系采用的是右手系,而地面测量坐标系采用的是左手系,这给由摄影测量坐标到地面测量坐标的转换带来了困难。为此,在摄影测量坐标系与地面测量坐标系之间建立一种过渡性的坐标系,称为地面摄影测量坐标系,其坐标原点在测区内的其一地面点上。 5.摄影测量中,为什么常要把像空间坐标变换为像空间辅助坐标,常用的坐标变换公式是什么?答:由于将像平面坐标求像点的像空间坐标时,每张相片的像空间坐标系不统一,给计算带来困难。因此建立相对统一的像空间辅助坐标系。像空间坐标系和像空间 7.什么叫共线方程,它在摄影测量中有何应用 答:共线方程是:共线方程即中心投影的构像方程共线方程式包括十二个数据:以像主点为原点的像点坐标,相应地面点坐标,像片主距及外方位元素。 主要应用如下:(1)单片后方交会和立体模型的空间前方交会;②求像底点的坐标;③光束法平差中的基本方程④解析测图仪中的数字投影器;⑤航空摄影模拟;⑥利用DEM进行单张像片测图。 9.什么叫像点位移,简述引起像点位移的因素答:当航摄像片有倾角或地面有高差时,所摄的像片与上述理想情况的差异。这种差异反映为一个地面点在地面水平的水平像片上的构像与地面有起伏时或斜像片上构成的点位不同,这种点位的差异称为像点位移。
一、名词解释 1摄影测量学 2航向重叠 3单像空间后方交会 4相对航高 5解析空中三角测量 6外方位元素 7核面 8绝对定向元素 二、问答题 1.写出中心投影的共线方程式并说明式中各参数的含义。 2.指出采用“后方交会+前方交会”和“相对定向+绝对定向”两种方法计算地面点坐标的基本步骤。 3.简述利用光束法(一步定向法)求解物点坐标的基本思想。 4.简述解析绝对定向的基本过程。 5.简述相对定向的基本过程。
6.试述航带网法解析空中三角测量的基本步骤。 二、填空 1摄影测量的基本问题,就是将_________转换为__________。 2人眼产生天然立体视觉的原因是由于_________的存在。 3相对定向完成的标志是__________。 三、简答题 1两种常用的相对定向元素系统的特点及相对定向元素。 2倾斜位移的特性。 3单航带法相对定向后,为何要进行比例尺归化?怎样进行? 4独立模型法区域网平差基本思想。 5何谓正形变换?有何特点? 四、论述题 1空间后方交会的计算步骤。 2有三条航线,每条航线六张像片组成一个区域,
采用光束法区域网平差。 (1)写出整体平差的误差方程式的一般式。(2)将像片进行合理编号,并计算带宽,内存容量。 (3)请画出改化法方程系数阵结构简图。 参考答案: 一、 1是对研究的对象进行摄影,根据所获得的构想信 息,从几何方面和物理方面加以 分析研究,从而对所摄影的对象 本质提供各种资料的一门学科。2供测图用的航测相片沿飞行方向上相邻像片的重叠。 3知道像片的内方位元素,以及三个地面点坐标和量测出的相应像点的坐标,就可以根据共线方程求出六个外方位元素的方法。
对摄影测量基本原理的认识 宋剑虹 (贵州大学矿业学院测绘工程 09级2班) 内容摘要 摄影测量【photogrammetry】有二百多年的历史了。通过对摄影测量的学习和认识。本文从摄影测量最基本的原理出发,简单回顾了它的发展历程,本文立足于对武汉大学第二版《摄影测量》教程的学习以及对摄影测量基础知识的了解和认识后,阐述了摄影测量的一些基本知识。着重阐述了当代摄影测量技术最新理论的发展。尤其是对摄影测量的分类,分别阐述大地摄影测量、航空摄影测量、航天摄影测量的一些基本原理后相关技术要点。对大地摄影测量、航空摄影测量的内外业的有关步骤和相应技术作了一定的论述。最后,总结出自己的在学习过程中的对摄影测量的认识,作为测绘专业学生,我更看到新的希望。 关键词:摄影测量测量技术基本原理航天技术
目录 一、引言 (3) 二、摄影测量概述 (3) (一)关于摄影测量 (3) 1.摄影测量学的定义和任务 (3) 2.摄影测量的特点 (3) (二)摄影测量的发展阶段 (4) 三、摄影测量学的分类 (4) (一)地面摄影测量 (4) 1.地面摄影测量的基本原理 (4) 2.地面立体摄影测量的摄影方式 (4) 3.地面摄影测量分为外业工作和内业工作 (5) (二)航空摄影测量 (5) 1.航空摄影测量的基本原理 (5) 2.航空摄影测量的测图方法 (6) 3.航空摄影测量的作业分外业和内业 (7) (三)航天摄影测量 (7) 1.航天摄影测量的基本原理 (8) 2.航天摄影测量的特点 (8) 3.航天摄影测量的应用前景 (8) 四、结语 (8)
一、引言 摄影测量学有二百多年的历史了。最初叫图形量学(据 Iconometry 而来,或译作量影术)。1837年,发明摄影技术后,才叫摄影测量学。数学家勃兰特早在18世纪就论述了摄影测量学的基础——透视几何理论。1839年,法国报到了摄影像片的产生后,摄影测量学开始了它的发展历程。19世纪中叶,法国陆军上校劳塞达利用所谓“明箱”装置,测制了万森城堡图。劳塞达被公认为“摄影测量之父”。航空技术发达以后,摄影测量学被称为航空摄影测量学。1975年,卫星上天后,航空测量发展到了航天摄影测量。 通过上世纪八九十年代对数字摄影测量的研究、开发与推广,进入21世纪,我国数字摄影测量以世人难以想象的速度发展,数字摄影测量工作站在中国的摄影测量生产中获得了普遍的应用与推广,摄影测量的教学也由过去只有少数院校才能进行的“贵族”式的教学得到了极大的普及。目前,全国至少有40多所大专院校的测绘工程专业开设摄影测量课程,这极大地拓宽了摄影测量所需人才的培养渠道。 二、摄影测量概述 (一)关于摄影测量 1.摄影测量学的定义和任务 摄影测量【photogrammetry】指的是通过影像研究信息的获取、处理、提取和成果表达的一门信息科学。传统摄影测量学定义:是利用光学摄影机获取的像片,经过处理以获取被摄物体的形状、大小、位置、特性及其相互关系的一门学科。摄影测量学是测绘学的分支学科,它的主要任务是用于测绘各种比例尺的地形图、建立数字地面模型,为各种地理信息系统和土地信息系统提供基础数据。摄影测量学要解决的两大问题是几何定位和影像解译。几何定位就是确定被摄物体的大小、形状和空间位置。几何定位的基本原理源于测量学的前方交会方法,它是根据两个已知的摄影站点和两条已知的摄影方向线,交会出构成这两条摄影光线的待定地面点的三维坐标。影像解译就是确定影像对应地物的性质。 2.摄影测量的特点 在影像上进行量测和解译,主要工作在室内进行,无需接触物体本身,因而很少受气候、地理等条件的限制;所摄影像是客观物体或目标的真实反映,信息丰富、形象直观,人们可以从中获得所研究物体的大量几何信息和物理信息;可以拍摄动态物体的瞬间影像,完成常规方法难以实现的测量工作;适用于大范围地形测绘,成图快、效率高;产品形式多样,可以生产纸质地形图、数字线划图、数字高程模型、数字正摄影像等。