(10)授权公告号 (45)授权公告日 (21)申请号 201520612489.8 (22)申请日 2015.08.14 G01N 1/14(2006.01) (73)专利权人克拉玛依市天明化工有限责任公 司 地址834000 新疆维吾尔自治区克拉玛依市 白碱滩区三平镇建设路88号 (72)发明人王明宪 刘莉 慎娜娜 许海涛 杨利 吴伟龙 (54)实用新型名称 一种新型液体化工产品取样器 (57)摘要 本实用新型公开了一种新型化工液体产品取 样器,包括取样器本体,所述取样器本体的底部设 有取样孔,所述取样器本体的外壁设有刻度,以便 后期控制抽样层位的位置;所述取样器本体内安 装具有活动塞座的活动把手;本实用新型的优点 在于:结构简单,使用方便,取样精确,避免了取 样器撒漏,有利于取样器的清洗。(51)Int.Cl. (19)中华人民共和国国家知识产权局(12)实用新型专利权利要求书1页 说明书2页 附图1页CN 204855204 U 2015.12.09 C N 204855204 U
1.一种新型化工液体产品取样器,其特征在于:包括取样器本体,所述取样器本体的底部设有取样孔,所述取样器本体的外壁设有刻度,以便后期控制抽样层位的位置;所述取样器本体内安装具有活动塞座的活动把手。 2.根据权利要求1所述的一种新型化工液体产品取样器,其特征在于:所述取样器本体的外壁安装有可移动式管套。
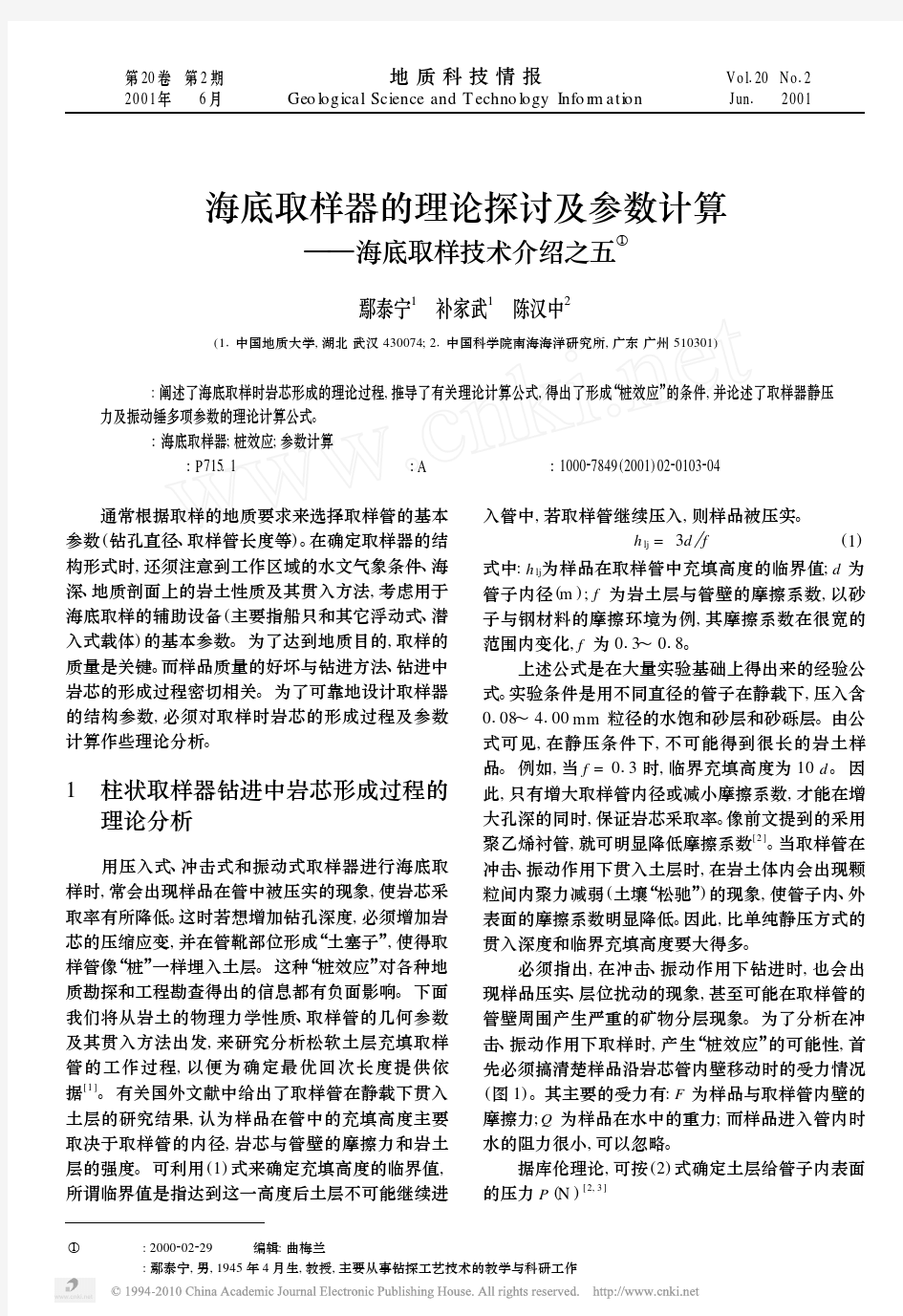
一种新型液体化工产品取样器 技术领域 [0001] 本实用新型涉及一种化工产品取样装置,具体地说是一种新型液体化工产品取样器,属于化工产品取样装置领域。 背景技术 [0002] 在化工生产、试验领域,针对液体、膏状黏稠液体的取样器一般都是玻璃取样器,但是化工产品、原料取样过程发现,传统取样器存在抽取样品时不易控制具体的取样位置,抽取的样品容易撒漏;并且在玻璃取样器表面会黏沾大量的抽取样品,在用同一取样器抽取不同样品时,外壁黏沾的样品清洗不干净,会污染待测样品,反复清洗工作量又比较大,不易处理。 实用新型内容 [0003] 为了解决上述问题,本实用新型设计了一种新型化工液体产品取样器,结构简单,使用方便,取样精确,避免了取样器撒漏,有利于取样器的的清洗。 [0004] 本实用新型的技术方案为: [0005] 一种新型化工液体产品取样器,包括取样器本体,所述取样器本体的底部设有取样孔,所述取样器本体的外壁设有刻度,以便后期控制抽样层位的位置;所述取样器本体内安装具有活动塞座的活动把手,用手指控制使活动塞座与活动把手同时上下滑动。[0006] 使用时,将玻璃取样器插入取样桶中,可根据需取样的层位不同,确定刻度位置,同时根据活动塞座控制取样器抽取样品的层位。 [0007] 进一步地,所述取样器本体的外壁安装可移动式管套,取样时,将可移动的管套移至取样器最高处,取样后管壁黏有大量液体、膏状黏稠物时,移动管套,将取样器外壁的物质刮除,这样就避免了取样器撒漏、抽取下一桶时,上一桶样品的对其的影响,并有利于取样器的的清洗。 [0008] 本实用新型的优点在于:结构简单,使用方便,取样精确,避免了取样器撒漏,有利于取样器的的清洗。 [0009] 下面结合附图和实施例对本实用新型作进一步说明。 附图说明 [0010] 图1为本实用新型实施例的结构示意图。 具体实施方式 [0011] 以下对本实用新型的优选实施例进行说明,应当理解,此处所描述的优选实施例仅用于说明和解释本实用新型,并不用于限定本实用新型。 [0012] 实施例1 [0013] 如图1所示,一种新型化工液体产品取样器,包括取样器本体1,所述取样器本体1
水下机器人设计概述 摘要:由于海洋开发利用越来越受到人们重视,水下机器人有着广阔的应用前景。但是目前为止,还没有成熟固定的水下机器人设计方法。本文通过论述水下机器人的构成、水下机器人的构成、排水量的初步估算、艇形选择、重量重心的计算、浮力浮心的计算、阻力的测定与计算、有效功率的计算等阐明了水下机器人基本的设计思路。此外探讨了计算机在水下机器人设计中的应用。 关键字:水下机器人、设计、计算机辅助设计 一.水下机器人的构成 水下机器人由控制系统、载体、观通系统三大系统组成。控制系统是处理和分析内部和外部各种信息的综合系统,根据这些信息形成对载体的控制功能。观通系统是利用摄像机、照相机、照明灯、声纳、及多种传感器收集有关外界和系统工作的所有信息的装置。而载体则是装载控制系统和观通系统的基础和构架。 二.根据选择设备,初步估算排水量 跟据水下机器人的用途不同,水下机器的设备也有很大的差别。通常是根据设计任务书,分析各种性能参数,确定出合适的设备。选择设备应该使水下机器人的重量最轻,因为无论是从使用还是从经济性角度讲,排水量越小是越有利的。由于潜水器要保持重量和浮力的平衡,所以可以分别从重量和浮力两个不同的角度研究排水量与各主要要素间的关系。三.艇型选择 潜水器根据使命任务和技术要求的不同,其外型尺寸、结构型式都有很大的差异。由于潜水器的航速不高,阻力性能对其外形要求不高,因而除采用水滴形和常规型艇型之外,更多的潜水器外型设计是出于使用维修方便、布置合理等方面考虑,因此其外型可能显得不规则,特别是无人带线遥控潜水器,其典型形式是框架式结构。 四.耐压壳材料选择 常用的耐压壳有高强度刚、铝合金、钛合金、复合材料(包括玻璃、陶瓷、丙烯酸朔料等等)。由于水下机器人主要受到静水压力的作用,所以选择耐压壳要综合考虑下潜的深度、耐压壳的形状、材料特性等因素。另外由于海水腐蚀性强,耐压壳还要有一定的抗腐蚀的能力。 四.潜水器推进与操纵方式选择 潜水器由于任务不同,对推进和操纵的要求也不同。但综合起来,潜水器主要要求巡航、搜索和悬停三种水下运行方式。由于在水下有海流存在,为满足潜水器的使命任务,一般要求潜水器在悬停或近乎悬停状态下作6个自由度或者至少5个自由度运动,在水流作用下也能够作相应的机动,因此在选择推力系统时,必须考虑在要求的方向发出推力和力矩。例如其搭配方式可以为:两个可在垂直面内作3600旋转的导管推力器加水平舵和首推力器、并联可旋转的喷水推进器等等。 五.阻力的确定。 由于水下机器人的主体上搭载的附体较多,且有些机器人的艇形是框架式的,所以用计算流体力学是很难得出其所受的阻力,即便算出也会因为误差太大而无法应用。所以阻力的确定主要是通过试验的方法。如果试验条件限制,或者机器人体积过大,则需要进行模型试验。根据相似理论,满足主要影响因素,保证模型和实体的弗罗德数或者雷洛数相等,测出水下机器人的摩擦阻力系数、形状阻力系数经过换算,得出实体的阻力。
低成本水下机器人 策 划 书 申报项目: 低成本水下机器人 申报人: 孟永志 项目负责人: 孟永志 申报日期: 年4月17日
低成本水下机器人策划书 机器人项目创业计划执行概要 水下机器人从20世纪后半叶诞生,是工作于水下的极限作业机器人,能潜入水中代替人完成某些操作,又称无人遥控潜水器,主要运用在海上救援。由于水下环境恶劣危险,人的潜水深度有限,所以水下机器人日益成为开发海洋的重要工具。在军事斗争中,无人化作战平台将在未来现代化战争中发挥重要的作用,无人舰艇将与无人地面战车、无人飞机一起在战场上进行高效卓越地作战。另外,无论战争期间还是和平时期,水下机器人还可以定期对航道、训练场、舰艇机动区实施定期或不定期检查,保障这些水域的作业安全。 载人潜水器由人工输入信号操控各种动作,由潜水员和科学家通过观察窗直接观察外部环境。其优点是由人工亲自做出各种核心决策,便于处理各种复杂问题,但是人生命安全的危险性增大,由于载人需要足够的耐压空间、可靠的生命安全保障和生命维持系统,这将为潜水器带来体积庞大、系统复杂、造价高昂、工作环境受限等不利因素。 有缆水下机器人(ROV)需要由电缆从母船接受动力,并且ROV不是完全自主的,它需要人为的干预。主要由水面设备(包括操纵控制台、电缆绞车、吊放设备、供电系统等)和水下设备(包括中继器和潜水器本体)组成。潜水器本体在水下靠推进器运动,本体上装有观测设备(摄像机、照相机、照明灯等)和作业设备(机械手、切割器、清洗器等)。潜水器的 水下运动和作业,是由操作员在水面母舰上控制和监视,电缆向本体提供动力和交换信息,中继器可减少电缆对本体运动的干扰。由于人们通过电缆对ROV进行遥控操作,电缆对ROV像“脐带”对于胎儿一样至关重要,但是由于细长的电缆悬在海中成为ROV最脆弱的部分,大大限制了机器人的活动范围和工作效率。 无缆水下机器人(AUV)又称自治水下机器人、智能水下机器人,是将人工智能、探测识别、信息融合、智能控制、系统集成等多方面的技术集中应用于同一水下载体上,在没有人工实时控制的情况下,自主决策、控制完成复杂海洋环境中的预定任务使命的机器人。是从简单的遥控式向监控式发展,即由母舰计算机和潜水器本体计算机实行递阶控制,它能对观测信息进行加工,建立环境和内部状态模型。操作人员通过人机交互系统以面向过程的抽象符号或语言下达命令,并接受经计算机加工处理的信息,对潜水器的运行和动作过程进行
1、水质采样器根据应用的场合,可以分为固定式在线式采样器与便携式可移动采样器; 固定式在线式采样器一般会与在线水质监测设备联机运行,比如与在线式COD 测定仪实现超标留样功能,与数据采集传输仪联动实现远程控制采样功能;便携式水质采样器一般应用于户外或者野外的水质自动采样,它要求采样器体积要便于移动,稍大一些的便携式采样器一般会具有底轮、拉杆等附件,便携式采样器还需要具有备用电源,以应用于无外电源的场合,优秀的便携式水质自动采样器会具有车载充电或太阳能供电等模式;除了固定式和便携式的,还有一些两用的,可以做在线水质采样,也可以便携式水质采样 下附:便携式水质采样器和固定式水质采样器 TC-8000G型便携式一体野外自动水质采样器 一、仪器描述 TC-8000G型便携式一体野外自动水质采样器采用一体式设计,整机嵌入坚固的一体式设计工具箱内,整机防水设计,外壳坚固,功能丰富,操作简单,可
全天候应用,无需有复杂的专业知识,该产品非常方便用户便携应用,亦可在某些特定的场合作为在线采样器使用,性价比高,满足用户的大应用需求。 二、功能特点 1、机箱采用一体化开模设计,整机坚固耐用;采用防水设计,防护等级IP67,可在雨雪等恶劣天气中工作; 2、仪器自带底轮,自带拉杆,方便用户移动应用; 3、内置锂电池供电,满足48小时工作(可增加电池以继续延长工作时间),支持车载供电、太阳能等多种充电方式; 4、电池电量自动检测,当内置电池欠压时提示用户及时充电; 5、桶满自动检测,非接触式检测方式,当采样桶中水满时自动停止采样,并声光报警提示用户; 6、缺桶自动检测,当采样桶被移走时自动停止采样,并声光报警提示用户,待重新安装后继续工作; 7、混合式步进电机,细分驱动器,运行平稳,噪音极小; 8、多种信号接口方式,方便与各种在线设备联机应用,具备USB接口; 8、自动采样时,单次采样间隔、采样量、采样次数均可设置,可无限次自动采样; 7、具有自动排空功能,可自动排空采样管,清洗采样管路; 8、具有支持手动、自动采样功能,正反转向可调,转速可调; 9、人性化设计,参数设置方便,操作简单,一键式启动采样; 10、具有数据存储功能,设置参数自动保存,断电不丢失,上电自启动; 11、蠕动采样方式,采用优质的进口蠕动管,采样误差少;
GB/T4756-1998石油液体手工取样法 一、范围 1、本标准规定了用手工方法从固定油罐、铁路罐车、公路罐车、油船、油驳、桶、听,或从正在输送液体的管线中取得液态烃、油罐残渣和沉沉淀物样品的方法 2、本标准适用于液体石油产品、原油及中间产品,其罐内压力应为常压或接近常压,且被取样的石油或液体石油产品在从接近环境温度直到100℃时应为液态 3、本标准不适用于特殊石油产品的特殊性质分析的取样,如:电器绝缘油、液化石油气、液化天然气、沥青和化学产品以及雷德蒸汽压高于180kPa的不稳定原油的取样 4、本标准规定的取样方法适用于采取用于下列目的的样品: A、确定油品质量如果用于A、 B、C B、确定油品中水含量目的的取样条件有冲突 C、确定所转移的液体中的其他污染物必须单独取样 5、专业术语 ⑴完整样品:样品处于没有被改变的完整状态,即所保存的样品和从散装液体中取得时具有相同的组成 ⑵样品准备:在制备分析样品时,必须进行均化,并成为稳定样品 ⑶样品处理:指样品准备、转移、划分和运输,包括从取样器(接受器)中将样品转移到容器和从容器中将样品转移到进行分析的实验室仪器中 ⑷组合样:按规定的比例合并若干个点样所得到的代表整体物料的样品 ⑸点样:在油罐内规定的位置上或是在泵送操作期间在规定的时间从管线中取得的样品 ⑹出口液面样:从油罐内输出液体的最低液面取得的样品 ⑺上部样:在石油液体的顶表面下其深度1/6液面处所取得的样品 ⑻中部样:在石油液体的顶表面下其深度5/6液面处所取得的样品 ⑼下部样:在石油液体的顶表面下其深度1/2液面处所取得的样品 ⑽顶部样:在石油液体的顶表面下150mm处所取得的点样 ⑾表面样(撇取样):从液体石油表面取得的样品 ⑿溶解水:在常温下与油形成溶液而存在于油中的水 ⒀悬浮水:以细小水滴的形式悬浮在油中的水 ⒁游离水:与油分开存在的一层水,其典型的位于油层下面 ⒂总水:石油货物中的溶解水、悬浮水和游离水的总和 *撇取样油面 *顶部样 *上部样
水下机器人发展概述 1水下机器人发展背景 在浩瀚的宇宙中,有一个蔚蓝色的星球,那是人类赖以生存的地方——地球。地球的表面积为5.1亿平方公里,而海洋的面积为3.6亿平方公里。地球表面积的71%被海洋所覆盖。在烟波浩渺的海洋深处,蕴藏着什么样的宝藏?是否存在着智慧生命?海底生物是怎样生活的?海底的地形地貌又是什么样的?所有这一切都使海洋充满了神秘的色彩,也吸引了无数科学家、探险家为之探索。从远古时代起,人们就泛舟于海上。从19世纪起,人们开始利用各种手段对海洋进行探察。20世纪,水下机器人技术作为人类探索海洋的最重要的手段,受到了人们普遍的关注。进入21世纪,海洋作为人类尚未开发的处女地,已成为国际上战略竞争的焦点,因而也成为高技术研究的重要领域。毫不夸张地说,本世纪是人类进军海洋的世纪。人类关注海洋,是因为陆上的资源有限,海洋中却蕴藏着丰富的矿产资源、生物资源和能源。另一个重要原因是,占地球表面积49%的海洋是国际海底区域,该区域内的资源不属于任何国家,而属于全人类。但是如果哪一个国家有技术实力,就可以独享这部分资源。因此争夺国际海底资源也是一项造福子孙后代的伟大事业。水下机器人作为一种高技术手段,在海底这块人类未来最现实的可发展空间中起着至关重要的作用,发展水下机器人的意义是显而易见的。 2水下机器人的定义与分类 2.1水下机器人的定义与概述 水下机器人也称作无人水下潜水器(unmannedunderwatervehicles,UUV),它并不是一个人们通常想象的具有类人形状的机器,而是一种可以在水下代替人完成某种任务的装置。在外形上更像一艘微小型潜艇,水下机器人的自身形态是依据水下工作要求来设计的。生活在陆地上的人类经过自然进化,诸多的自身形态特点是为了满足陆地运动、感知和作业要求,所以大多数陆地机器人在外观上都有类人化趋势,这是符合仿生学原理的。水下环境是属于鱼类的“天下”,人类身体的形态特点与鱼类相比则完全处于劣势,所以水下运载体的仿生大多体现在对鱼类的仿生上。目前水下机器人大部分是框架式和类似于潜艇的回转细长体,随着仿生技术的不断发展,仿鱼类形态甚至是运动方式的水下机器人将会不断发展。水下机器人工作在充满未知和挑战的海洋环境中,风、浪、流、深水压力等各种复杂的海洋环境对水下机器人的运动和控制干扰严重,使得水下机器人的通信和导航定位十分困难,这是与陆地机器人最大的不同,也是目前阻碍水下机器人发展的主要因素。 2.2水下机器人的分类 水下潜水器根据是否载人分为载人潜水器和无人潜水器两类。载人潜水器由人工输入信号操控各种机动与动作,由潜水员和科学家通过观察窗直接观察外部环境,其优点是由人工亲自做出各种核心决策,便于处理各种复杂问题,但是人生命安全的危险性增大。由于载人需要足够的耐压空间、可靠的生命安全保障和生命维持系统,这将为潜水器带来体积庞大、系统复杂、造
全自动水质采样器 一、全自动水质采样器产品简介: TC-8000D型便携式全自动等比例采水器仪器符合国家水质自动采样器技术要求及检测方法(HJ/T372-2007),是集流量测量和水样采集一体化的多功能监测仪器,具有体积小,重量轻,便于携带等特点,是国家环保总局水环境能力监测仪器设备的中标产品。适用于各级环境监测站、污水处理厂、水利、水务及科研院所,对工业污染源排放口、江、河、湖、海等水样进行自动采样。 二、全自动水质采样器仪器特色 1.模块化的程序结构,双CPU控制电路,多级光电隔离,提高了产品的综合性能★ 2.配置多种输入接口,可与流量计、液位计联机,完成采样 3.仪器底部配备万向轮设计,且带有锁扣,可在斜坡等场地固定住仪器,使用运输更方便;★ 4.高可靠蠕动泵,混合式步进电机细分驱动,运行平稳可靠 5.具有两级软件密码系统,保护内部程序不被修改,防止非法操作; 6.仪器佩戴有锁扣,防止人为对已采集样品的置换; 7.具有等比例采样、超标留样、手动控制采样、定时定量采样、即时定量采样、液位比例采样、定流定量等多种采样方式;
8.具有即时启动、外部信号触发启动、预设时间启动等多种启动方式,满足对不同采样方式的需求; 9.仪器可接入包括4~20mA、RS232、RS485、开关量信号,方便与其他仪器联机运行,也可选配远程通信接口以及打印功能,远程控制仪器及打印数据; 10.管路可自动排空、预淋洗,保证样品的代表性;仪器具有多种水样分装方式(单瓶单样、单瓶多样、多瓶单样)自动分装样品; 11.主机内置大容量存储单元,可存储两年的包括月、日、时的流量记录以及操作记录,方便统计分析; 12.内置大容量进口锂电池,仪器可持续工作50小时,交直流两用,配有车载充电器插口; 13.采用高性能蠕动泵头和高强度医用蠕动管配合液体传感器,有效提高样品采集精度; 14. 全塑外壳,冷藏箱保存样品,携带方便 15. 配套有备用水质样品箱,可与水质采样器配套使用★ 三、全自动水质采样器技术参数 1、流量特性:300~1600mL/min ★ 2、采样间隔:1~10000分钟,幅度1分钟 3、采样量:1~1000ml,幅度1毫升 4、垂直吸程:8米 5、水平吸程:100米,具有管路自动排空、预淋洗功能★ 6、样品个数:1-12个可设,可混合采样★ 7、样品容量:12个聚乙烯瓶*1000mL/个 8、蠕动管规格:6.9*12.5mm 9、管路气密性:连续承压0.17Mpa,间隔承压0.27Mpa ★ 10、运行稳定性:无故障连续运行大于1500h/次 11、采样量误差:±5% 12、等比例采样误差:±7% 13、采样重复精度:±5ml(用户可自校)
1范围 1.1 本方法规定了用手工法从固定油罐、铁路罐车、公路罐车、油船和驳船、桶和听、或者从正在输送液体的管线中(见3.3)获得液态烃、油罐残渣和沉淀物样品的方法。 1.2 本方法适用于从油罐中贮存的或是由管线输送的液体石油产品、原油和中间产品中采取样品,其罐内压力应为常压或接近常压,并且,被取样的石油或液体石油产品在从接近环境温度直到100℃时应为液态。 本方法规定的取样方法不适用于特殊石油产品的特殊性质分析的取样。对于这类石油产品特殊性质分析样品的采取应该按其他有关标准的规定进行,例如电气绝缘油、液化石油气、液化天然气、沥青和化学产品以及雷德蒸气压高于180 kPa(1.8 bar。)的不稳定原油的取样都有相应的特殊要求。 1.3 两个基本的手工取样法是: a)油罐取样; b)管线取样。 当接收或发运一批油品时,不是采用油罐取样就是采用管线取样,或者是两者都采用。如果使用两种方法时,所取得的两组样品不应被混合。 1.4 本方法还规定了减少或消除样品中轻组分损失的方法。在样品处理或转移期间,可能出现上述损失,而使得样品失去代表性。 1.5如果将适用于采取贮存的或移动的均匀石油液体的代表性样品的方法用于采取在组成和沉淀物和(或)水分含量方面有明显差别的不均匀液体的样品时,所取得的样品可能没有代表性。 1.6本方法规定的取样方法适用于采取用于下列目的的样品: a)确定油品质量; b)确定油品中水含量; c)确定所转移的液体中的其他污染物。 如果对于a)、b)和c)目的的取样条件有冲突时,必须单独取样。 1.7 本方法还规定了用于确定罐内不均匀油品的不均匀程度,并估计其质量和数量的取样方法。 1.8 本方法还包括了罐内残渣和沉淀物的取样方法,以及在惰性气体压力下的液态烃的取样技术。 2 相关技术术语
自动取样器操作规程 一.自动取样器系统组成 取样器由过滤器、泵体、取样系统、流量计,及相应管道配件组装,经由出入口法兰与主管道连接,形成旁路。打开出入口阀门,旁路并入主管道系统,即可进行自动取样。关闭出入口阀门,旁路与主管道系统隔离,即可作自动取样器之保养维修。 重要事项 请特别注意: 1. 启动泵体之前,确定液体充满座管道,不得残存空气,才能启动泵体。 2. 任何时候都必须严格遵守先开(出入口)阀门,后开泵体;先关泵体,后关阀门的顺序; 3. 排污口接管须保持畅通,不得增设阀门,以保证安全阀在超压时能顺利泄压; 二.自动取样器首次并入主管道运行 如下操作程序,可以完全排除器体管道中空气及污物,适用于首次并入主管道运行,或保养清洗后管道中残留油垢、清洁剂时。
重要事项 所有排污阀都关闭,必须确定出口阀关闭。慢慢打开入口阀同时观察压力表,压力表上升直到停止不动,慢慢开排气阀,确认空气完全排除后关闭排气阀(停留10-15 秒)再重开排气阀,再三确认空气必须完全排除(此动作可再三重复多次),最后再慢慢开出口阀,再回来检查压力表,直到稳定再开排气阀,直到真正确认空气完全排除再关闭,启动Pump(2)。 1. 慢慢打开入口端阀门,让主管道油品缓缓进入; 2. 慢慢打开出口端阀门; 3. 小心慢慢打开密度计上方的排气阀,再三确定完全排除空气后再关紧; 4. 打开排污阀,排除空气及污物,之后再关紧。此时单向阀之后各段管道应已充满纯净油品,仅流量开关段仍有可能积存空气或污物; 5. 关闭出口端阀门; 6. 重复动作 3,打开排气阀,空气及污物排除,确定完全排除空气后再关闭排气阀; 7. 完全打开出入口端阀门; 8. 开启泵体运行。 正常运行中,样品流速不宜太大(2000~3500 升/小时) 自动取样器大修后重新并入,也依上述程序操作。 三.自动取样器保养与维修
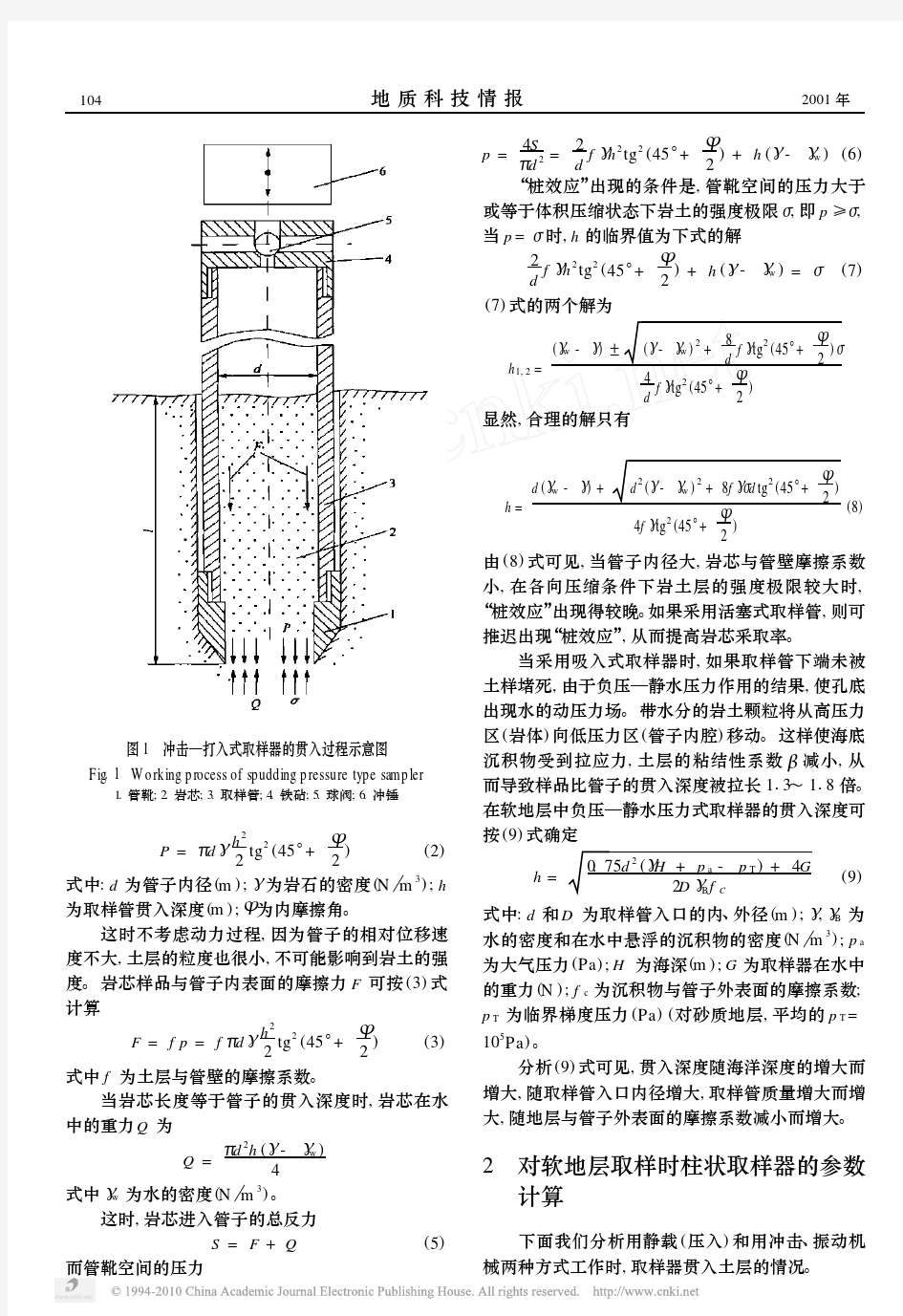
一次性高粘度液体取样器ViscoThief ViscoThief Single Use Sampler for High Viscosity Liquids The Disposable ViscoThief is ideal for sampling viscous materials such as oils, creams, shampoo and honey.Simple to operate. Takes a sample within seconds. ? Assembled & Packed in a Cleanroom
? FDA & EU 10/2011Conforming Materials ? BSE/TSE Free ? Full Batch Traceability ? Suitable for use in ATEX areas (500mm and 1000mm lengths only) ? Available Sterile (gamma irradiated*) Operation: 1. Insert the sampler into the product 2. At the required depth pull up the handle. The sample will be drawn into the sampler 3. Withdraw sampler 4. Push down handle to expel the sample Note: The further the handle is pulled the greater the sample volume 1. 订货号:SC8055H-500,长度:500mm,是否灭菌:No,最大取样量:100ml,直径:21mm,材质:HDPE,包装数量:20 2. 订货号:SC8055H-500S,长度:500mm,是否灭菌:Yes,最大取样量:100ml,直径:21mm,材质:HDPE,包装数量:20 3. 订货号:SC8055H-1000,长度:1000mm,是否灭菌:No,最大取样量:190ml,直径:21mm,材质:HDPE,包装数量:20 4. 订货号:SC8055H-1000S,长度:1000mm,是否灭菌:Yes,最大取样量:190ml,直径:21mm,材质:HDPE,包装数量:20 5. 订货号:SC8055H-1500,长度:1500mm,是否灭菌:No,最大取样量:300ml,直径:21mm,材质:HDPE,包装数量:20 6. 订货号:SC8055H-1500S,长度:1500mm,是否灭菌:Yes*,最大取样量:300ml,直径:21mm,材质:HDPE,包装数量:20 7. 订货号:SC8055P-500,长度:500mm,是否灭菌:No,最大取样量:100ml,直径:21mm,材质:PP,包装数量:20 8. 订货号:SC8055P-1000,长度:1000mm,是否灭菌:No,最大取样量:190ml,直径:21mm,材质:PP,包装数量:20 * SC8055H-1500S samplers are sterilised by Electron Beam
水质自动采样器建设要求 仅以市场主流产品全自动水质采样器(LFLY-DW2004)为例说明水质自动采样器建设要求。 一、产品特性 LFLY-DW2004全自动水质留样系统是力合科技(湖南)股份有限公司自主研制开发的水质留样仪器,其主要特点有:采样方式:自动采样、手动采样、随机采样; 触发方式:常规采样、瞬时采样、等时等比例采样、远程遥控采样; 样品冷藏、自动混合样品、分项目样品贮存; 关键部分采用不锈钢设计,避免用生锈而影响工作; 可接流量计、PH计等外设,并自动采集流量和PH值进行显示和传送到中心平台; 冷藏系统可使水样恒温在设定的温度的±1℃范围内,如设定为4℃,系统会恒温在4±1℃范围内; 水样储存温度:0℃~20℃可调; 手动、等时及等比三种工作模式可选; 具有高灵敏度进样液位检测器; 可自动将所有数据传送到中心平台服务器进行存储和处理; 5.7英寸TFT液晶显示(320*240),可以图形显示当前
12个留样瓶的储水状态; 具备数字(RS232或RS485)和模拟(4~20mA,0~20mA,0~24mA,0~5V)输出(选配) 可根据外接(4~20mA)信号进行相应的显示和以及对强电的反控; 自动打印留样结果(选配); 具有自动清洗、反吹洗和润洗的功能; 具有缺水样报警功能; 采样量只能在采样成功后自动存储,不会误报采样量; 自动加密、故障报警 分装方式:可采混合样和平行样。 采样系统与其他在线系统兼容,超标留样功能要求保证采样分析的水样和超标所留水样为同一个水样。 工作温度:额定工作温度为-5℃~55℃; 相对湿度:≤90%RH; 电源电压:交流220V±10%; 电源频率:50Hz±1Hz。
水下机器人发展趋势 关键词:水下机器人、智能水下机器人、智能体系、运动控制、通讯导航、探测识别、高效能源 随着人类海洋开发的步伐不断加快,水下机器人技术作为人类探索海洋最重要的手段得到了空前的重视和发展。作者对水下机器人进行了定义与分类。介绍了近年来国内外水下机器人的发展现状与发展趋势,重点针对智能水下机器人的主要关键技术及未来发展方向进行了分析。地球的表面积为5.1亿km2,而海洋的面积为3.6亿km2。占地球表面积71%的海洋是人类赖以生存和发展的四大战略空间——陆、海、空、天中继陆地之后的第二大空间,是能源、生物资源和金属资源的战略性开发基地,不但是目前最现实的,而且是最具发展潜力的空间。作为蓝色国土的海洋密切关系到人类的生存和发展,进入21世纪后,人类更加强烈的感受到陆地资源日趋紧张的压力,这是人类面临的最现实的问题。海洋即将成为人类可持续发展的重要基地,是人类未来的希望。水下机器人从20世纪后半叶诞生起,就伴随着人类认识海洋、开发海洋和保护海洋的进程不断发展。专为在普通潜水技术较难到达的区域和深度执行各种任务而生的水下机器人,将使海洋开发进人一个全新的时代,在人类争相向海洋进军的21世纪,水下机器人技术作为人类探索海洋最重要的手段必将得到空前的重视和发展[1]。 1海洋对人类的重要性
海洋作为蓝色国土,首先是一个沿海国家的“门户”,是其与远方联系的便捷途径,并且“门户”的安全是国家安全的重要组成部分,早在2 500多年前古希腊海洋学家锹未斯托克就提出过“谁控制了海洋,谁就控制了一切”。很久以来人们就依赖于海洋航道进行大量的物品贸易,现在整个世界大部分的货物运输都依赖于海上运输,海洋运输是整个经济正常运转必要的一环。更重要的是,现在很多国家的石油、矿石等最基本的生产资料大部分都依赖于海洋运输,海洋运输的安全和对海洋的控制力成为一个国家生存的基本保障。 近年来再次掀起海洋热的浪潮是因为陆上的资源有限,很多资源已经开发殆尽,而海洋中蕴藏着丰富的能源、矿产资源、生物资源和金属资源等,人们急需开发这些资源以接替所剩不多的陆上资源来维持发展。更为重要的是,地球上半数以上面积的海洋是国际海域,这些区域内全部的资源属于全体人类,不属于任何国家。但目前的现状是只有少数国家有能力对这些资源进行初步开采,这些国家在其已探明的区域拥有优先开采权,相对于那些没有能力开采的国家这几乎就等于独享这部分资源。因此海洋已经成为国际战略竞争的焦点,争夺国际海洋资源是一项造福子孙后代的伟大事业。所以水下技术成为目前重点研究的高新技术之一,智能水下机器人作为高效率的水下工作平台在海洋开发与利用中起到至关重要的作用。 2水下机器人的定义与分类
水质自动采样器广泛应用于污染源、污水处理厂进出口,与COD、氨氮、重金属等在线监测仪联机使用。流量跟踪采样模式,可根据瞬时流量自动调整采样流量,实现连续采样,确保采集的水样更具代表性。提供A\B桶混合样功能,可向在线监测仪提供无间断的混合水样,可有效避免弥补了在测量周期内的采样盲区在线监测仪间断测量以点代面的不足。仪器完全符合HJ353-2019、HJ354-2019、HJ355-2019的国家标准,该采样器是在线监控系统、总量减排整体解决方案的理想配套设备。同时、该仪器可以实现采集混合水样、混匀及暂存混合水样、超标留样及报警、冷藏样品、自动清洗及排空等功能。 水质采样器选型指南 1、水质采样器适用于那些行业? 适用于各级环境监测站、污水处理厂、水利、水务及科研院所,对工业污染源排放口、江、河、湖、海等水样进行自动采样。 水质采样器是用来做什么的? 2、水质采样器用来做什么的? 水质采样器是采集水质样品的一种装置。分为:人工采样器、水质自动采样器,在线自动采水器。 3、水质采样器类型 (1)人工采样器 型号产品特点 JC-800 带温度计,采样深度达到30米 JC-800A 采样深度达到50米,可以采油和采水 JC-800C 主要有三部分:采样杆和,采样瓶,控制阀门组成,长度达
4米 JC-800D 分为水平式和垂直式,适用于河流,湖泊海洋等任意深度采 样 (2)水质自动采样器 型号产品特点 JC-8000A 最大垂直吸程:10m,无储水瓶 JC-8000B 最大垂直吸程:8m,无储水瓶 JC-8000D 最大垂直吸程:8m,具有12个储水瓶,一体机 样品瓶容量:1000毫升 采样方式:定时定量采样、定流定量采样、等时等流量比例、等时等液位比例、即时定量采样 分瓶方式:单瓶单样、单瓶多样、多瓶单样 JC-8000E 最大垂直吸程:8m,具有12或24个储水瓶,分体式 样品瓶容量:1000毫升 采样方式:定时定量采样、定流定量采样、等时等流量比例、等时等液位比例、即时定量采样 分瓶方式:单瓶单样、单瓶多样、多瓶单样 (3)在线自动采水器 型号产品特点
全自动等比例水质采样器 一、全自动等比例水质采样器仪器简介 仪器采用全金属外壳,并且优化内部采样程序以更好的适应我国水质污染现状及环境检测部门水质采样的需求;仪器设计符合国家水质自动采样器技术要求及检测方法 (HJ/T372-2007),该型号采水器引进高稳定性蠕动泵,结合智能化程序,可以实现定时、定量、定时间隔、定流间隔等多种采样模式,适用于各级环境监测站、污水处理厂、水利、水务及科研院所,对工业污染源排放口、江、河、湖、海等水样进行自动采样。 二、全自动等比例水质采样器仪器特色 1.全金属外壳代替塑料外壳,更耐用,更有效适应现场采样的技术要求;★ 2.全金属防雨罩,可适应雨雪等恶劣天气气候下的室外采样; 3.仪器底部配备万向轮设计,且带有锁扣,可在斜坡等场地固定住仪器,使用运输更方便;★ 4.采用 5.5英寸大屏幕LCD蓝色背投显示屏,屏幕可动态显示每个样品瓶的样品体积; 5.具有两级软件密码系统,保护内部程序不被修改,防止非法操作; 6.仪器佩戴有锁扣,与用户自配的锁具结合使用可实现对仪器采集的样品保护,防止人为对已采集样品的置换;
7.具有等比例采样、超标留样、手动控制采样、定时定量采样、即时定量采样、液位比例采样、定流定量等多种采样方式; 8.具有即时启动、外部信号触发启动、预设时间启动等多种启动方式,满足对不同采样方式的需求; 9.仪器可接入包括4~20mA、RS232、RS485、开关量信号,方便与其他仪器联机运行,也可选配远程通信接口以及打印功能,远程控制仪器及打印数据; 10.管路可自动排空、预淋洗,保证样品的代表性;仪器具有多种水样分装方式(单瓶单样、单瓶多样、多瓶单样)自动分装样品; 11.主机内置大容量存储单元,可存储两年的包括月、日、时的流量记录以及操作记录,方便统计分析; 12.内置大容量进口锂电池,仪器可持续工作50小时,交直流两用,配有车载充电器插口; 13.采用高性能蠕动泵头和高强度医用蠕动管配合液体传感器,有效提高样品采集精度; 14. 配套有备用水质样品箱,可与水质采样器配套使用★ 三、全自动等比例水质采样器技术参数 1、流量特性:300~1600mL/min ★ 2、采样间隔:1~10000分钟,幅度1分钟 3、采样量:1~1000ml,幅度1毫升 4、垂直吸程:8米 5、水平吸程:100米,具有管路自动排空、预淋洗功能★ 6、样品个数:1-24个可设,可混合采样★ 7、样品容量:24个聚乙烯瓶*1000mL/个 8、蠕动管规格:6.9*12.5mm 9、管路气密性:连续承压0.17Mpa,间隔承压0.27Mpa ★ 10、运行稳定性:无故障连续运行大于1500h/次 11、采样量误差:±5% 12、等比例采样误差:±7%
水下机器人发展概述 --船舶102 赵书孝 1005080224 无人遥控潜水器,也称水下机器人。一种工作于水下的极限作业机器人,能潜入水中代替人完成某些操作,又称潜水器。水下环境恶劣危险,人的潜水深度有限,所以水下机器人已成为开发海洋的重要工具。无人遥控潜水器主要有,有缆遥控潜水器和无缆遥控潜水器两种,其中有缆避控潜水器又分为水中自航式、拖航式和能在海底结构物上爬行式三种。 特别是近10年来,无人遥控潜水器的发展是非常快的。从1953年第一艘无人遥控潜水器问世,到1974年的20年里,全世界共研制了20艘。特别是l974年以后,由于海洋油气业的迅速发展,无人遥控潜水器也得到飞速发展。到1981年,无人遥控潜水器发展到了400余艘,其中90%以上是直接;或间接为海洋石油开采业服务的。1988年,无人遥控潜水器又得到长足发展,猛增到958艘,比1981年增加了110%。这个时期增加的潜水器多数为有缆遥控潜水器,大约为800艘上下,其中420余艘是直接为海上池气开采用的。无人无缆潜水器的发展相对慢一些,只研制出26艘,其中工业用的仪8艘,其他的均用于军事和科学研究。另外,载人和无人混合理潜水器在这个时期也得到发展,已经研制出32艘,其中28艘用于工业服务。 无人有缆潜水器研制与发展 无人有缆潜水器的研制开始于70年代,80年代进入了较快的发展时期。1987年,日本海事科学技术中心研究成功深海无人遥控潜水器“海鲀3K”号,可下潜3300米。研制“海鲀3K”号的目的,是为了在载人潜水之前对预定潜水点进行调查而设计的,供专门从事深海研究的,同时,也可利用“海鲀3K”号进行海底救护。“海鲀3K”号属于有缆式潜水器,在设计上有前后、上下、左右三个方向各配置两套动力装置,基本能满足深海采集样品的需要。1988年,该技术中心配合“深海6500”号载人潜水器进行深海调查作业的需要,建造了万米级无人遥控潜水器。这种潜水器由工作母船进行控制操作,可以较长时间进行深海调查。这种潜水器可望在1992年内建成,总投资为40亿日元。日本对于无人有缆潜水器的研制比较重视,不仅有近期的研究项目,而且还有较大型的长远计划。目前,日本正在实施一项包括开发先进无人遥控潜水器的大型规划。这种无人有缆潜水器系统在遥控作业、声学影像、水下遥测全向推力器、海水传动系统、陶瓷应用技术水下航行定位和控制等方面都要有新的开拓与突破。这项工作的直接目标是有效地服务于200米以内水深的油气开采业,完全取代目前由潜水人员去完成的危险水下作业。在无人有缆潜水技术方面,始终保持了明显的超前发展的优势。根据欧洲尤里卡计划,英国、意大利将联合研制无人遥控潜水器。这种潜水器性能优良,能在6000米水深持续工作250小时,比现在正在使用的只能在水下4000米深度连续工作只有l2小时的潜水器性能优良的多。按照尤里卡EU-191计划还将建造两艘无人遥控潜水器,一艘为有缆式潜水器,主要用于水下检查维修;另一艘为无人无缆潜水器,主要用于水下测量。这项潜水工程计划将由英国;意大利、丹麦等国家的l7个机构参加。英国科学
8000D水质自动采样器, 自动水质采样器,水质自动采样器8000D LB-8000D自动水质采样器 青岛孙志强水质采样器 水质自动采样器8000D 水质自动采样器8000D青岛厂家 便携式水质采样器8000D 中标产品水质自动采样器8000d 8000d水质采样器厂家青岛宜兰 青岛宜兰水质采样器8000D生产厂家 青岛自动水质采样器8000D 水质自动采样器8000D厂家是谁 8000D水质采样器多少钱 水质采样器8000D价格 环保总局水环境监测专用采水器 自动采水器标配12瓶采样 水质取样器用于污水处理厂 水质监测仪水质采样器 采水器8000D自动采水器 污水处理厂用自动采水器 自动采水器12瓶采样采水器 自动水质采样器8000d 便携式自动采水器 水质采样器用于污水采样 水样采样器用于水利水务研究所 水质采样器对排放到江河里污染源水样采样用于各级环境监测站 水样采样器 水质自动采样器符合行业标准 水利局用水质采样器 水质自动采样器8000D 水质采样器采用穿透折射原理 水质自动采样器蠕动泵吸入式 便携式分瓶水质采样器 概述:仪器符合国家水质自动采样器技术要求及检测方法(HJ/T372-2007),是集流量测量和水样采集一体化的多功能监测仪器,具有体积小,重量轻,便于携带等特点,是国家环保总局水环境能力监测仪器设备的中标产品。适用于各级环境监测站、污水处理厂、水利、水务及科研院所,对工业污染源排放口、江、河、湖、海等水样进行自动采样。 8000D功能特点: →模块化的程序结构,双CPU控制电路,多级光电隔离,提高了产品的综合性能 →配置多种输入接口,可与流量计、液位计联机,完成采样 →红外流量检测器控制自动排空、清洗管路,保证采集到新鲜、标准的水样 →高可靠蠕动泵,混合式步进电机细分驱动,运行平稳可靠
负压气体自动采样器 采集煤矿井下空气中的气样,携带到地面上通过气相色谱仪等仪器对气样中的氧、氮、一氧化碳、二氧化碳、甲烷、乙烯等做定性定量的分析,是保障煤矿安全生产正常进行的一项基础性工作。多年来,采集煤矿井下空气气样的常规方法是手工球胆采样法,这种采样方法存在着劳动强度大、样品真实性差、不安全等多方面的缺点 2 环境条件 2.1 采样器在下列条件下应能正常工作: a)环境温度:0℃~+40℃; b)平均相对湿度:≤95%RH,(+25℃时); c)大气压力:80kPa~106kPa; d)使用环境:具有甲烷、煤尘爆炸性混合物的煤矿井下。 2.2 贮存温度:-40℃~+60℃。 3.本安参数 电池组由5节镍氢电池串接4Ω限流电阻,环氧树脂胶封而成,环氧树脂厚度应≥3㎜; 电池组开路电压U :7.0V; :2.3A; 电池组短路电流I 工作电压:6.0V;工作电流:840.00mA; 4、基本性能 采样器出口气体流量为22L/min;误差:±2L/min。 5. 工作时间 采样器电池正常充电后,其工作时间应不小于40 min。正常工作时间内,采样器不应出现欠压关机,基本性能应符合第4条的规定。 6. 欠压报警功能 采样器出现欠压时,能发出光报警信号;光信号在暗处能见度应不小于20m远。 7. 外形尺寸及重量7.1外形尺寸: 215mm×130mm×110mm。7.2重量:1.6Kg 8. 工作原理 1.镍氢电池组 2.直流电动机 2.抽气泵 4.泵进气口 5.拉杆 6.进气胶管 7.泵出气口 8.贮气装置 采样器工作原理(如上图所示):把贮气装置(如球胆)通过胶管连接到采样器的出气口后,开启采样器的电源开关,采样器中的抽气泵在较短的时间内就能向贮气装置中充满空气样品,关闭采样器电源开关,拆下贮气装置后绑扎、紧固好,气样采集工作即告完成。 9.使用方法
水质自动采样器 参考资料:中国环保网(https://www.doczj.com/doc/a88985051.html,/news/details9756.htm) 一:水质采样器概述 在环境污染的监测和水体污染的调查工作中,要真实地反映水质污染状况。必须采集具有代表性的水样。特别是当前用立法和经济手段搞好环境管理的情况下,在水资源保护工作中,如何采集具有代表性水样的方法及其正确性,就是得更为重要。 工厂排放的污水的水质、水量往往在短时间内有很大变化,生活污水也随着人们生活习惯及季节变化而改变,所以总的水体和河流的污染情况是很复杂。而我们以往的取样工具,一直是比较落后的手工操作。工作量大、准确性差。 水质采样器(water sampler)是采集水质样品的一种装置。有水质人工采样器和水质自动采样器两种。水质人工采样器的材料必须对水样的组成不产生影响,且易于洗涤,对先前的样品不能有任何残留。水质自动采样器是适合于与流量成比例的库斗式采样器,它是一种智能化多功能吸入式水样分瓶采样装置。它可以根据水样采样要求实现多种采样方式(定量采样、定时定量采样、定时流量比例采样、定流定量采样和远程控制采样)及多种装瓶方式(每瓶单次采样--单采和每瓶多次采样--混采)。是对江、河、湖泊、企业排放水等实现科学监测的理想采样工具。 二:水质采样器仪器结构 主要有以下组成: (1)采样控制器: 装于室内,主要是设置采样时间和采样工作。 (2)支架、支杆、采样电机: 装于室外水池 三:水质采样器使用方法 (1)将支架、支杆按图装于室外采水点,再将采样电机,装在支杆上、根据水面的高度调整好采样电机的位置(注意:采样电机不可以全部浸入水中,只有圆盘以下可以浸入水中)(2)将采样水管从采样出水口接好、另一段接入实验室的取水瓶中。 (3)将采样电机的电源线和室内的采样器主机连好。 (4)接上主机的电源,设定好采样时间、就可工作。 (5)采样时间的设定步骤见下。