Chapter 3: Feedback Control System Characteristics
FUNDAMENTALS OF CONTROL ENGINEERING
Chapter 3: Feedback Control System Characteristics
Chapter 3: Feedback Control System Characteristics 3.1 Open- and closed-loop control systems 3.2 Control of the transient response of control systems 3.3 Steady-state error of feedback control systems 3.4 Disturbance rejection of feedback control systems 3.5 The cost of feedback 3.6 Design examples 3.7 Summary
Email: hjz@https://www.doczj.com/doc/aa7573580.html,
? School of Mechanical Engineering, Southeast University
1
? School of Mechanical Engineering, Southeast University
2
Chapter 3: Feedback Control System Characteristics
Chapter 3: Feedback Control System Characteristics
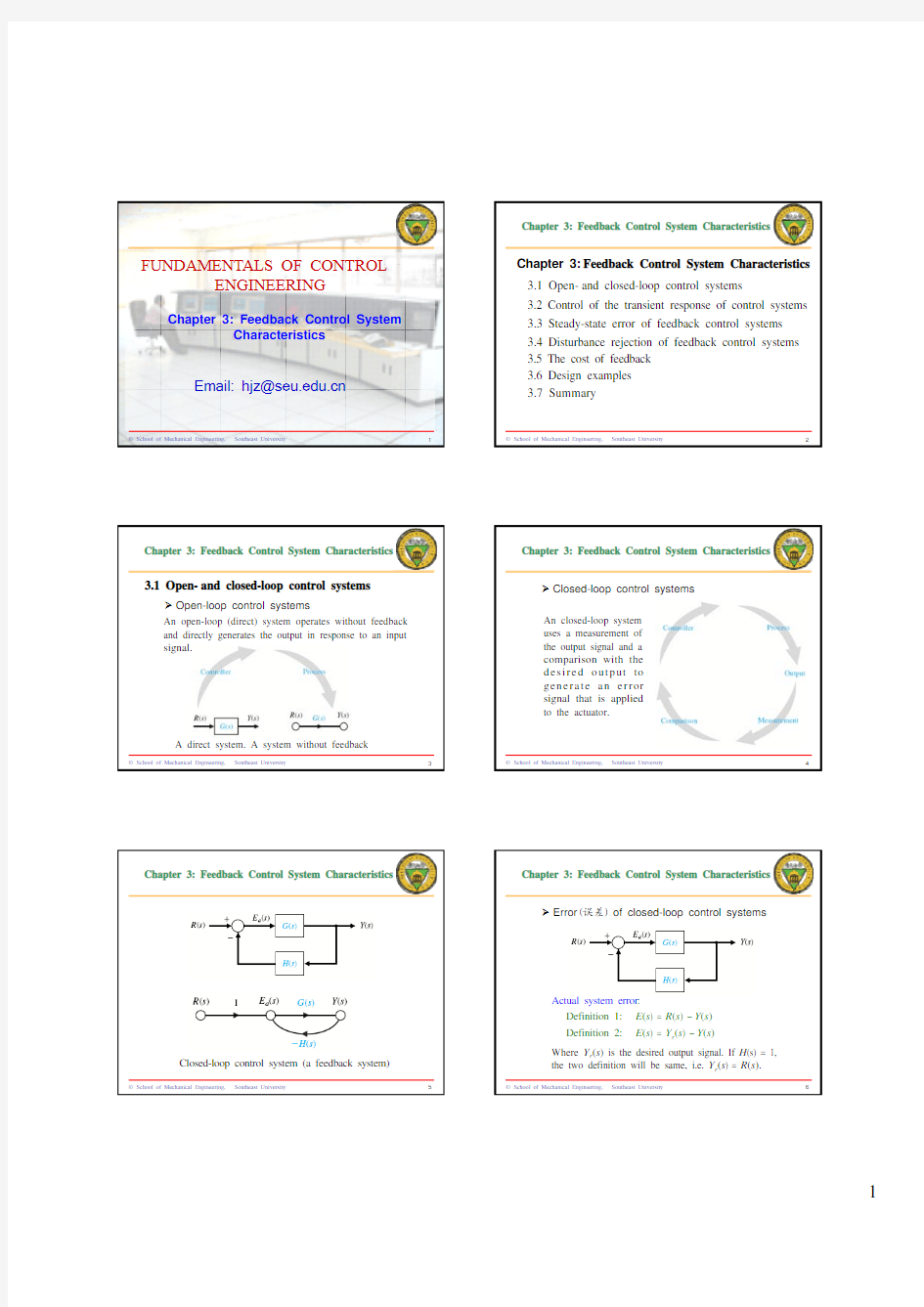
3.1 Open- and closed-loop control systems
Open-loop control systems An open-loop (direct) system operates without feedback and directly generates the output in response to an input signal.
Closed-loop control systems An closed-loop system uses a measurement of the output signal and a comparison with the desired output to generate an error signal that is applied to the actuator.
A direct system. A system without feedback
? School of Mechanical Engineering, Southeast University 3 ? School of Mechanical Engineering, Southeast University 4
Chapter 3: Feedback Control System Characteristics
Chapter 3: Feedback Control System Characteristics
Error(误差) of closed-loop control systems
Actual system error: Definition 1: Definition 2: Closed-loop control system (a feedback system)
? School of Mechanical Engineering, Southeast University 5
E(s) = R(s) – Y(s) E(s) = Yr(s) – Y(s)
Where Yr(s) is the desired output signal. If H(s) = 1, the two definition will be same, i.e. Yr(s) = R(s).
? School of Mechanical Engineering, Southeast University 6
1
Chapter 3: Feedback Control System Characteristics
Chapter 3: Feedback Control System Characteristics
A measure of the system error (deflected error)(偏差): Ea(s) = R(s) – H(s)Y(s) On the principles of the feedback control, if Ea(s) = 0, the actual system output will equal the desired output. Thus, for a non-unity feedback system (i.e. H(s) ≠ 1) the desired output will be
Yr ( s ) = R( s) H ( s) E ( s) R( s) ? Y ( s) = a H (s) H (s)
7
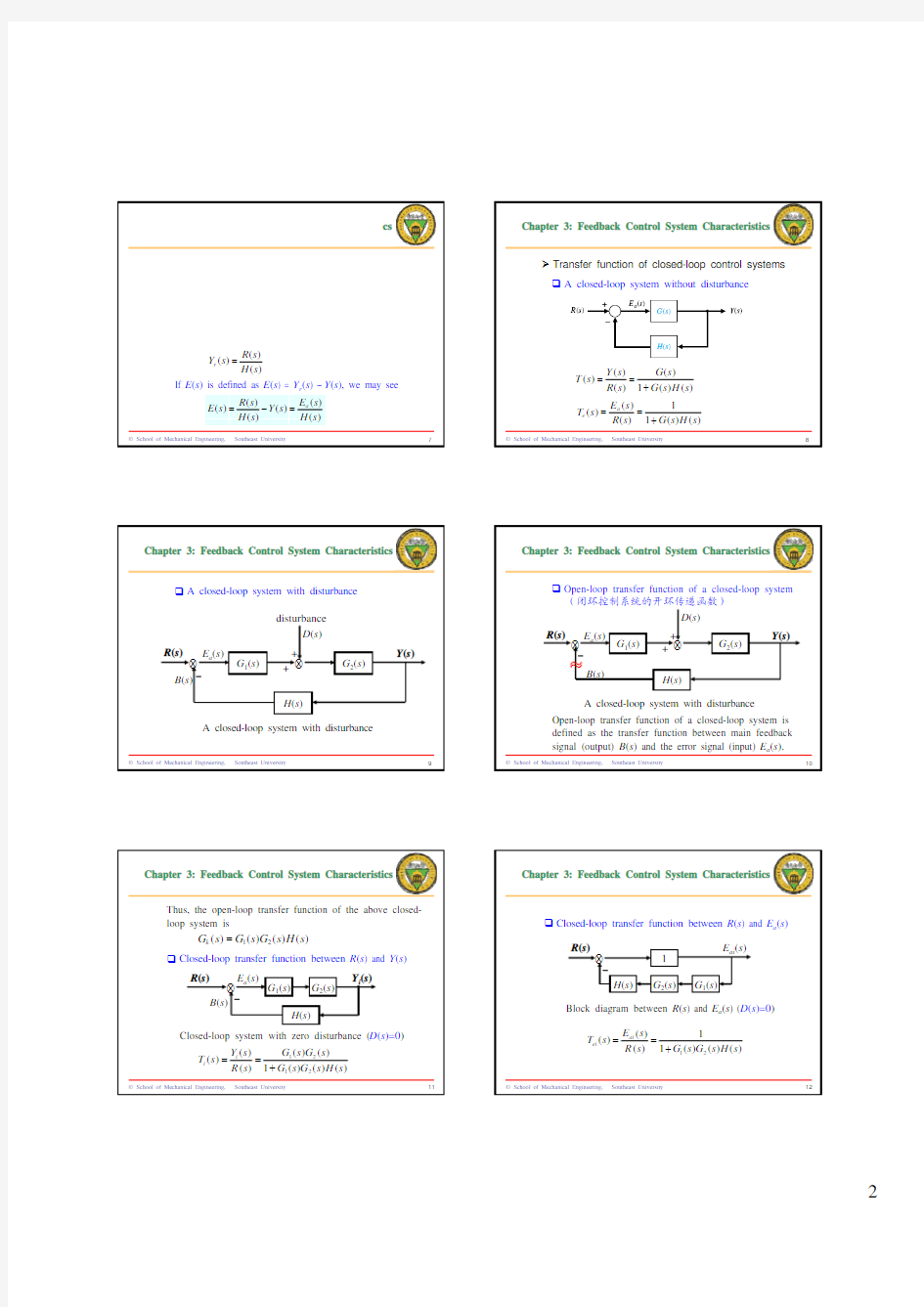
Transfer function of closed-loop control systems A closed-loop system without disturbance
If E(s) is defined as E(s) = Yr(s) – Y(s), we may see
E ( s) =
T (s) =
Y ( s) G(s) = R( s) 1 + G ( s) H ( s) Ea ( s ) 1 = R( s) 1 + G ( s ) H ( s)
8
Te ( s ) =
? School of Mechanical Engineering, Southeast University
? School of Mechanical Engineering, Southeast University
Chapter 3: Feedback Control System Characteristics
Chapter 3: Feedback Control System Characteristics
A closed-loop system with disturbance disturbance D(s) R(s)
Open-loop transfer function of a closed-loop system (闭环控制系统的开环传递函数) D(s) R(s) Y(s)
?
Ea(s)
+ G1(s) +
?
Ea(s) B(s)
G1(s)
+ +
?
G2(s)
Y(s)
?
G2(s)
B(s) H(s) A closed-loop system with disturbance
? School of Mechanical Engineering, Southeast University 9
H(s)
A closed-loop system with disturbance Open-loop transfer function of a closed-loop system is defined as the transfer function between main feedback signal (output) B(s) and the error signal (input) Ea(s).
? School of Mechanical Engineering, Southeast University 10
Chapter 3: Feedback Control System Characteristics Thus, the open-loop transfer function of the above closedloop system is Gk ( s ) = G1 ( s )G2 ( s ) H ( s ) Closed-loop transfer function between R(s) and Y(s) R(s)
Chapter 3: Feedback Control System Characteristics
Closed-loop transfer function between R(s) and Ea(s) R(s)
?
H(s)
1 G2(s) G1(s)
Eai(s)
?
B(s)
Ea(s)
G1(s) H(s)
G2(s)
Yi(s)
Block diagram between R(s) and Ea(s) (D(s)=0)
Tei ( s) = Eai ( s) 1 = R ( s ) 1 + G1 ( s )G2 ( s) H ( s )
Closed-loop system with zero disturbance (D(s)=0)
Y (s) G1 ( s )G2 ( s ) Ti ( s ) = i = R ( s ) 1 + G1 ( s )G2 ( s ) H ( s )
? School of Mechanical Engineering, Southeast University 11
? School of Mechanical Engineering, Southeast University
12
2
Chapter 3: Feedback Control System Characteristics
Chapter 3: Feedback Control System Characteristics
Closed-loop transfer function between D(s) and Y(s) D(s)
Closed-loop transfer function between D(s) and Ea(s) D(s)
?
G1(s)
G2(s) H(s)
Yd(s)
?
G2(s)
H(s) G1(s)
-1
Ead(s)
+
Closed-loop system with D(s) as input (R(s)=0)
Block diagram between Ea(s) and D(s) (R(s)=0)
Td ( s ) =
Yd ( s) G2 ( s ) = N ( s ) 1 + G1 ( s )G2 ( s) H ( s)
Ted ( s ) =
13
Ead ( s ) ? G2 ( s) H ( s ) = D( s ) 1 + G1 ( s)G2 ( s ) H ( s)
14
? School of Mechanical Engineering, Southeast University
? School of Mechanical Engineering, Southeast University
Chapter 3: Feedback Control System Characteristics
Chapter 3: Feedback Control System Characteristics
Note
Y ( s) G1 ( s )G2 ( s ) Ti ( s ) = i = R ( s ) 1 + G1 ( s )G2 ( s ) H ( s )
Tei ( s) = Ea ( s ) 1 = R ( s) 1 + G1 ( s )G2 ( s ) H ( s)
System output of the closed-loop system with disturbance On the properties of linear system, the system output stimulated by the input and disturbance is
Y ( s ) = Yi ( s) + Yd ( s)
Y ( s) G2 ( s ) Td ( s ) = d = N ( s ) 1 + G1 ( s )G2 ( s) H ( s)
Ted ( s) = ? G2 ( s) H ( s) Ea ( s ) = D ( s ) 1 + G1 ( s )G2 ( s) H ( s)
1+Gk(s)
=
G1 ( s )G2 ( s ) G2 ( s) R( s) + D( s ) 1 + G1 ( s)G2 ( s) H ( s) 1 + G1 ( s)G2 ( s) H ( s)
Ea ( s) = Eai ( s ) + Ead ( s ) =
15
? G2 ( s ) H ( s) 1 R(s) + D( s) 1 + G1 ( s )G2 ( s ) H ( s) 1 + G1 ( s )G2 ( s ) H ( s)
16
? School of Mechanical Engineering, Southeast University
? School of Mechanical Engineering, Southeast University
Chapter 3: Feedback Control System Characteristics
Chapter 3: Feedback Control System Characteristics
3.2 Control of the transient response(瞬态响应) of control systems
Transient response of control systems The transient response is the response of a system as a function of time. The transient response of control systems often must be adjusted until it is satisfactory. Example: transient response of a first–order system
Step response
R( s) =
1 s
1 1 ? Ts + 1 s
Y ( s) = G ( s) R( s) = = 1 1 ? s s+ 1 T
? t
G ( s) =
1 Ts + 1
Pole:-1/T
y (t ) = 1 ? e T , t ≥ 0
17 ? School of Mechanical Engineering, Southeast University 18
? School of Mechanical Engineering, Southeast University
3
Chapter 3: Feedback Control System Characteristics
Chapter 3: Feedback Control System Characteristics
y(t) 1
Slope=1/T B 86.5%
y (t ) = 1 ? e ? t / T
Remarks Step response of a first-order system includes two response components, i.e. ?t T Transient component:
98.2%
99.3%
99.8%
0.632 63.2%
?e
A
95%
Steady-state component: 1 Step response is determined by the time constant T. The transient response time is about (3~4)T for the response remains within 5%~2% of the final output value(i.e. the steady-state output). t
19 ? School of Mechanical Engineering, Southeast University 20
0
1T
2T
3T
4T
5T
6T
? School of Mechanical Engineering, Southeast University
Chapter 3: Feedback Control System Characteristics
Chapter 3: Feedback Control System Characteristics Impulse response y(t) 1/T Slope ?
1 T2
R(s) = 1
Time constant T can be determined from the step response curve.
e
?
t T
= 1 ? y (t )
ln[1-y(t)] 0
1 ? t = ln[1 ? y (t )] T
Y ( s) = G ( s) =
1 1 T s+ 1 T
t
Slope = -1/T
1 0.368 T
y(t)
y (t ) =
t 1 ?T e , t≥0 T
The linear relation between ln[1-y(t)] and t can also be used to identify a first-order system.
? School of Mechanical Engineering, Southeast University 21
0
T
t
22
? School of Mechanical Engineering, Southeast University
Chapter 3: Feedback Control System Characteristics
Chapter 3: Feedback Control System Characteristics
Ramp response
1 R(s) = 2 s
Y ( s ) = G ( s ) R( s ) = 1 1 1 T T ? = ? + Ts + 1 s 2 s 2 s s + 1 T
t
y(t) r(t)
r(t
t )= T
e(∞)=T
y (t ) = t ? T + Te T , t ≥ 0
?
y(t)=t-T+Te-t/T
0 t
24
? School of Mechanical Engineering, Southeast University
23
? School of Mechanical Engineering, Southeast University
4
Chapter 3: Feedback Control System Characteristics
Chapter 3: Feedback Control System Characteristics
Transient response characteristic of linear systems Note that We have
yδ (t ) =
t 1 ?T e T ? t T t T
Control of the transient response Open-loop systems
d d δ ( t ) = [1( t ) ], 1( t ) = [t ] dt dt
yδ (t ) = y s (t ) =
y s (t ) = 1 ? e
d y s (t ) dt d y t (t ) dt
Cascade controller system (without feedback). Replacing the process G(s) or designing a suitable Cascade transfer function G1(s)G(s) to obtain the desired transient response.
25 ? School of Mechanical Engineering, Southeast University 26
y t ( t ) = t ? T + Te
?
? School of Mechanical Engineering, Southeast University
Chapter 3: Feedback Control System Characteristics
Chapter 3: Feedback Control System Characteristics
Example: Open-loop speed control system
For a step speed change command
k2 E s The transient speed change is Va ( s) =
ω (t ) = K1k 2 E (1 ? e ?t T
1
)
K1 ω ( s) = G ( s) = Va ( s ) T1s + 1
? ? Km Ra J ? ? K1 = , T1 = ? Ra b + K b K m Ra b + K b K m ? ? ?
27
Usually T1 is large due to the large load inertia J, and the open-loop transient response will be too slow. Because T1 is dominated by the load inertia J, It is very difficult to improve the transient response in the open-loop case.
? School of Mechanical Engineering, Southeast University 28
? School of Mechanical Engineering, Southeast University
Chapter 3: Feedback Control System Characteristics Closed-loop systems Adjusting the feedback loop parameters to yield the desired transient response. Example: Closed-loop speed control system
Chapter 3: Feedback Control System Characteristics The transient response to a step input is then K a K1 ω (t ) = (k 2 E ) 1 ? e ?(1+ Ka Kt K1 )t T1 1 + K a K t K1
(
)
ω ( s)
R( s)
=
(K K ) (1 + K a K t K1 ) K aG(s) K a K1 = = a 1 1 + K a K t G ( s) T1s + 1 + K a K t K1 T1 (1 + K a K t K1 ) s + 1
29
The amplifier gain K a and the tachometer gain constant Kt usually are variable, we may adjust them to meet the condition KaKt K1>>1, therefore 1 ω (t ) ≈ (k 2 E ) 1 ? e ? K a Kt K1t T1 Kt For a typical application, the open-loop pole might be 1/T1=0.10, if KaKt K1=100, the closed-loop pole will be KaKt K1/T1=10, a factor of 100 in the improvement of the speed of response.
(
)
? School of Mechanical Engineering, Southeast University
? School of Mechanical Engineering, Southeast University
30
5
Chapter 3: Feedback Control System Characteristics
Chapter 3: Feedback Control System Characteristics
The response of the open-loop and closed-loop speed control system when T 1 =10 and K1KaKt =100. The time to reach 98% of the final value for the open-loop and closed-loop system is 40s and 0.4s, respectively.
? School of Mechanical Engineering, Southeast University 31
3.4 Steady-state error of feedback control systems
Steady-state error The steady-state error is the error after the transient response has decayed, leaving only the continuous response. In control engineering, the steady-state is referred to the state while time t → ∞. That is, the steady-state error can be defined as
ess = e(∞) = lim e(t )
t →∞
Where e(t) is the error signal.
? School of Mechanical Engineering, Southeast University 32
Chapter 3: Feedback Control System Characteristics
Chapter 3: Feedback Control System Characteristics
Example: steady-state error of the first-order system Step response
Calculating steady-state error Final-value theorem:
y (t ) = 1 ? e , t ≥ 0
? t T
?
t T
ess = lim e(t ) = lim sE ( s )
t →∞ s →0
e(t ) = r (t ) ? y (t ) = e , t ≥ 0
Ramp response y (t ) = t ? T + Te
? t
t ? T
e(∞ ) = 0
, t≥0
Open-loop systems
Eo ( s ) = R( s ) ? Y ( s ) = [1 ? G ( s )]R ( s ) eo (∞) = lim s[1 ? G ( s )]R ( s )
s →0
e(t ) = r (t ) ? y (t ) = T ? Te T , t ≥ 0
For a unit step input,
e(∞) = T
? School of Mechanical Engineering, Southeast University 33
eo (∞) = lim[1 ? G ( s)] = 1 ? G (0)
s →0
? School of Mechanical Engineering, Southeast University 34
Chapter 3: Feedback Control System Characteristics
Chapter 3: Feedback Control System Characteristics
Closed-loop systems
The value of G(s) when s = 0 is often called the dc gain and is normally greater than 1. Therefore the open-loop system will usually have a steady-state error of significant magnitude. By contrast the closed-loop system with a reasonably large dc loop gain G(0)H(0) will have a small steady-state error.
Ea ( s ) =
1 R( s) 1 + G ( s) H ( s)
1 1 R( s) = 1 + G (0) H (0) 1 + G ( s) H (s)
35
For a unit step input,
However, one may find the open-loop steady-state error can be adjusted to zero by calibrating the dc gain G(0) to 1, whereas the closed-loop cannot be zero. What is the advantage of the closed-loop system in this case ?
? School of Mechanical Engineering, Southeast University 36
ea (∞) = lim s
s →0
? School of Mechanical Engineering, Southeast University
6
Chapter 3: Feedback Control System Characteristics Considering a first-order process
K G ( s) = Ts + 1
Chapter 3: Feedback Control System Characteristics For the open-loop system, calibrating the K to 1 to adjust the steady-state error to zero. If the dc gain drifts or changes in some way by
ΔK K = 0.1
For a unit step input, the steady-state error of the openloop system is
the change of the open-loop steady-state error will be
eo (∞) = 1 ? G (0) = 1 ? K
For a unity feedback system, the steady-state error with the same input is
Δeo (∞) = 0.1
the relative change from the desired setting is
ea (∞) =
1 1 = 1 + G ( 0) 1 + K
37
Δeo (∞) r (t )
=
0.1 = 0.1 1
10%
? School of Mechanical Engineering, Southeast University
? School of Mechanical Engineering, Southeast University
38
Chapter 3: Feedback Control System Characteristics By contrast, set the dc gain K to 100, the closed-loop steady-state error is
Chapter 3: Feedback Control System Characteristics
3.5 Disturbance rejection of feedback control systems
Disturbance in open-loop case Considering the speed control system for a steel rolling mill.
ea (∞) = 1 101
If the K is changed in the same way as the open-loop System with ΔK K = 0.1 If the gain decreases, the steady-state error will be
e′ (∞) = 1 91 a
If the relative change of the steady-state error is Δea (∞) 1 101 ? 1 91 = = 0.0011 0.11% r (t ) 1
? School of Mechanical Engineering, Southeast University 39
When the bar engages in the rolls, the load on the rolls increases immediately from unloaded to a large load.
? School of Mechanical Engineering, Southeast University 40
Chapter 3: Feedback Control System Characteristics
Chapter 3: Feedback Control System Characteristics
This loading effect can be approximated by a step change of disturbance torque.
The speed-torque curves of a typical motor is shown following
Open-loop speed control system (no external feedback exist) with an armature-controlled dc motor (Suppose that La is negligible)
? School of Mechanical Engineering, Southeast University 41
Motor speed–torque curves
? School of Mechanical Engineering, Southeast University 42
7
Chapter 3: Feedback Control System Characteristics
Chapter 3: Feedback Control System Characteristics
The change in speed due to the load disturbance can be find from the block diagram
The steady-state error in speed due to the load torque Td(s) = D/s is
e(∞) = lim sE ( s ) = lim s ?
s →0 s →0
D 1 ? Js + b + K m K b Ra s
=
E ( s ) = R ( s ) ? ω ( s ) = ?ω ( s ) ? ? 1 =? ? Js + b + K K / R ?Td ( s ) ? m b a ? ?
? School of Mechanical Engineering, Southeast University 43
D b + K m K b Ra
? School of Mechanical Engineering, Southeast University
44
Chapter 3: Feedback Control System Characteristics
Chapter 3: Feedback Control System Characteristics
Disturbance in closed-loop case Process disturbance
G1 ( s ) = K a K m Ra G2 ( s) = 1 ( Js + b ) H ( s) = Kt + K b / K a
Closed-loop speed tachometer control system.
? School of Mechanical Engineering, Southeast University 45
Equivalent block diagram and signal-flow graph model of the closed-loop system
? School of Mechanical Engineering, Southeast University 46
Chapter 3: Feedback Control System Characteristics Define the error of the system is E(s) = R(s) – ω (s)
? ? G2 ( s ) E ( s) = ?ω ( s ) = ? ? ? 1 + G ( s )G ( s ) H ( s) ?Td ( s) 1 2 ? ?
Chapter 3: Feedback Control System Characteristics
e(∞) = ?ωc (∞) =
Ra D K a K m Kt
If G1 ( s )G2 ( s ) H ( s ) >> 1 , we have
E ( s) ? 1 Td ( s ) G1 ( s ) H ( s )
The ratio of closed-loop to open-loop steady-state speed output due to an undesirable disturbance is
Adjusting the Ka so that Ka>>Kb , we have
ωc (∞) Ra b + K m K b = ω o (∞ ) K a K m Kt
The ratio is usually less than 0.02.
G1 ( s ) H ( s ) =
Ka Km ? K ? K K K ? Kt + b ? ≈ a m t Ra ? Ka ? Ra ? ?
47
? School of Mechanical Engineering, Southeast University
? School of Mechanical Engineering, Southeast University
48
8
Chapter 3: Feedback Control System Characteristics
Chapter 3: Feedback Control System Characteristics Measurement noise disturbance
If The closed-loop system speed–torque curves
? School of Mechanical Engineering, Southeast University 49
G1 ( s )G2 ( s ) H1 ( s ) H 2 ( s ) >> 1
1 ? G1 ( s)G2 ( s) H 2 ( s) N ( s) ? ? N ( s) 1 + G1 ( s)G2 ( s) H1 ( s ) H 2 ( s ) H1 ( s)
50
Yn ( s ) =
? School of Mechanical Engineering, Southeast University
Chapter 3: Feedback Control System Characteristics
Chapter 3: Feedback Control System Characteristics
Clearly the H1(s) should be as large as possible to decrease the influence of disturbance, this is equivalent to maximizing the signal-to-noise ratio of the measurement sensor and is equivalent to requiring that the feedback elements H(s) be well designed and operated with minimum noise, drift, and parameter variation.
Output noise disturbance
If |G(s)H(s)|>>1
Y (s) =
1 1 Td ( s ) ≈ Td ( s ) 1 + G(s) H (s) G ( s) H ( s)
? School of Mechanical Engineering, Southeast University
51
? School of Mechanical Engineering, Southeast University
52
Chapter 3: Feedback Control System Characteristics
Chapter 3: Feedback Control System Characteristics disturbance D(s) R(s)
Input noise disturbance D(s) 1 1
?
Ea(s)
+ G1(s) +
?
G2(s)
Y(s)
B(s) G -H 1 Y(s) H(s) A closed-loop system with disturbance
R(s)
May the input noise disturbance be reduced by the feedback control ?
Y ( s ) = Yi ( s) + Yd ( s ) = G1 ( s )G2 ( s) G2 ( s ) R( s ) + D( s ) 1 + G1 ( s)G2 ( s ) H ( s ) 1 + G1 ( s )G2 ( s ) H ( s)
54
? School of Mechanical Engineering, Southeast University
53
? School of Mechanical Engineering, Southeast University
9
Chapter 3: Feedback Control System Characteristics If G1 ( s )G2 ( s ) H ( s ) >> 1 and G1 ( s ) H ( s ) >> 1 ,
Y (s) = ≈ ≈ G1 ( s)G2 ( s) G2 ( s ) R( s) + D( s ) 1 + G1 ( s )G2 ( s ) H ( s ) 1 + G1 ( s)G2 ( s) H ( s ) 1 1 R( s) + D( s) H (s) G1 ( s ) H ( s ) 1 R( s) H (s)
1 ? G2 ( s) H ( s ) R( s ) + D( s ) 1 + G1 ( s )G2 ( s ) H ( s) 1 + G1 ( s)G2 ( s ) H ( s ) 1 D( s ) G1 ( s )
55
Chapter 3: Feedback Control System Characteristics
3.6 The cost of feedback
Increasing the number of components and complexity of the system Loss of gain Introduction of the possibility of instability
Ea ( s ) =
≈?
? School of Mechanical Engineering, Southeast University
? School of Mechanical Engineering, Southeast University
56
Chapter 3: Feedback Control System Characteristics
Chapter 3: Feedback Control System Characteristics
3.7 Design examples
Mars rover vehicle
Control system for rover; (a) open-loop (without feedback) and (b) closed-loop with feedback. The input is R(s) 1/s.
? School of Mechanical Engineering, Southeast University 57 ? School of Mechanical Engineering, Southeast University 58
Chapter 3: Feedback Control System Characteristics
Chapter 3: Feedback Control System Characteristics
Open-loop system
To ( s) = Y (s) K = R( s ) s 2 + 4s + 5
For the disturbance D(s) = 1/s, the steady-state value is ?1 1 ? 1 yo (∞) = lim s ? ? = s →0 ? ( s + 1)( s + 3) ? s 3
for K=2, To(s)=Tc(s)
Closed-loop system
Y ( s) K Tc ( s ) = = R( s) s 2 + 4s + 3 + K
1 1 ? ?1 yc (∞) = lim s ? 2 ? = s →0 ? s + 4s + 3 + K ? s 3 + K To minimize the effect of the disturbance, it is clearly that a larger value of K would be desirable. However, as we increase K beyond K = 50, the transient performance of the system for the ramp input r(t) begins to deteriorate.
59 ? School of Mechanical Engineering, Southeast University 60
? School of Mechanical Engineering, Southeast University
10
Chapter 3: Feedback Control System Characteristics
Chapter 3: Feedback Control System Characteristics
Unit-Ramp Response 3
1.4
1.2
2.5
k=50 1
2 Amplitude
0.8
1.5
y(t) 0.6 0.4 0.2
0 0.5 1 1.5 Time (sec) 2 2.5 3
1
0.5
0
0
0
500
1000
1500
2000 t(ms)
2500
3000
3500
4000
? School of Mechanical Engineering, Southeast University
61
? School of Mechanical Engineering, Southeast University
62
Chapter 3: Feedback Control System Characteristics Disk drive read system
Chapter 3: Feedback Control System Characteristics
Disk drive head control system with the typical parameters of Table 2.11. Control system for disk drive head reader
E (s) = 1 R(s) 1 + K a G1 ( s)G2 ( s )
T (s) = = Y (s) K a G1 ( s )G2 ( s ) = R( s ) 1 + K a G1 ( s)G2 ( s ) 5000 K a s 3 + 1020s 2 + 20000s + 5000 K a
64
? ? 1 e(∞) = lim s ? ? R( s ) s →0 ?1 + K aG1 ( s )G2 ( s ) ?
? School of Mechanical Engineering, Southeast University
63
? School of Mechanical Engineering, Southeast University
Chapter 3: Feedback Control System Characteristics
Chapter 3: Feedback Control System Characteristics
? School of Mechanical Engineering, Southeast University
65
? School of Mechanical Engineering, Southeast University
66
11
Chapter 3: Feedback Control System Characteristics
Chapter 3: Feedback Control System Characteristics
Y (s) G2 ( s ) = D( s ) 1 + K a G1 ( s )G2 ( s )
Disturbance response for Ka=80, D(s)=1/s
Faster in response, but oscillatory increases.
? School of Mechanical Engineering, Southeast University
67
? School of Mechanical Engineering, Southeast University
68
Chapter 3: Feedback Control System Characteristics
Chapter 3: Feedback Control System Characteristics
Open- and closed-loop control systems Steady-state error of feedback control systems
3.8 Summary
Disturbance rejection of feedback control systems
? School of Mechanical Engineering, Southeast University
69
? School of Mechanical Engineering, Southeast University
70
Chapter 3: Feedback Control System Characteristics
Chapter 3: Feedback Control System Characteristics
The advantage for using feedback: Ease of control and adjustment of the transient response Improvement in the rejection of the disturbance and noise Improvement in the reduction of the steady-state error Assignments: E4.7(a)(c)(d) AP4.2 AP4.7 DP4.3
? School of Mechanical Engineering, Southeast University
71
? School of Mechanical Engineering, Southeast University
72
12
第一章 烷烃(试题及答案) 一、命名下列化合物 1.CH CH 3CH 3 C CH 2CH 23CH 3CH 3 2. C 2H 5CH 3CH 3C CH 2CH 2CH 33CH 2CH 2 2,2,3-甲基己烷 4,4-二甲基-5-乙基辛烷 3. C 2H 5 CHCH CH 3CH 3CH 3 4. CH C 2H 5CH CH CH 3CH 3 CH 2CH 2CH 3CH 3CH 2 2,3-二甲基戊烷 2,6-二甲基-3-乙基辛烷 5. CH C 2H 5CH CH CH 3CH 3CH 3 CH 3CH 2 6.CH C 2H 5CH CH CH 33C 2H 5CH 3CH 2 2,4-二甲基-3-乙基己烷 2,5-二甲基-3-乙基庚烷 7. CH C 2H 5CH CH 3CH 3 CH 2CH 2CH 3 CH 2CH 2CH 3 8.CH 2CH 3C (C 2H 5)2(CH 3) 2,6-二甲基-5-乙基壬烷 3-甲基-3-乙基戊烷 9. CH 2CH 2CH CH 2CH 3 CH CH 332CH 2CH 3 10. (CH 3)2CH CH 2CH 2(C 2H 5)2 3-甲基-5-乙基辛烷 2-甲基-5-乙基庚烷 二、写出下列化合物的结构式 1. 2,2,4-三甲基戊烷 2. 4-甲基-5-异丙基辛烷 (CH 3)3CCH 2CH(CH 3)2 CH 2CH 2CH CH CH 33CH 2CH(CH 3)2 2CH 3 3.2-甲基-3-乙基庚烷 4. 4-异丙基-5-丁基癸烷 CH CH 3CH(CH 3)2(CH 2)32H 5 CH 2(CH 2)4CH CH CH 3CH 3 CH 2CH 3 3)2(CH 2)3 5.2-甲基-3-乙基己烷 6. 2,4-二甲基-3-乙基己烷 CH 2CH 2CH CH 3CH(CH 3)2CH 2CH 3 CH 2CH CH 3CH CH 3CH(CH 3)2CH 2CH 3 7.2,2,3,3-四甲基戊烷 8.2,4-二甲基-4-乙基庚烷 (CH 3)3C C 2H 5CH 3CH 3C (CH 3)2CH CH 2CH 3 2H 5CH 3 CH 2C CH 2 9. 2,5-二甲基己烷 10. 2,2,3-三甲基丁烷 (CH 3)2CHCH 2CH(CH 3)2CH 2 (CH 3)3C CH(CH 3)2 三、回答问题 1.2,2-二甲基丁烷的一氯代产物
第三章 例题与思考题 1.空位数随温度升高而增加,在20℃和1020℃之间,由于热膨胀bcc 铁的晶格常数增加0.51%,而密度减少 2.0%,假设在20℃时,此金属中每1000个单位晶胞中有1个空位,试估计在1020℃时每1000个单位晶胞中有多少个部位? 2.在500℃(773K)所做扩散实验指出,在1010个原子中有一个原子具有足够的激活能可以跳出其平衡位置而进入间隙位置,在600℃(873K)时,此比例会增加到109,问: (1)此跳跃所需要的激活能? (2)在700℃具有足够能量的原子所占的比例为多少? 3.在金属中形成一个空位所需要的激活能为2.0eV (或0.32×10-18J )。在800℃时,1×104个原子中有一个空位,问在何种温度下,1000个原子中含有1个空位? 4.Cu 晶体空位形成能 Ev=1.44×10-19J/atcm ,材料常数A=1,k=1.38×10-23J/k ,计算: (1)在500℃下,每立方米Cu 中的空位数目; (2)500℃下的平衡空位浓度。(Ar(Cu))=63.54g/mol, 500℃ Cu =8.96×106g/cm 3 5.在图1中的阴影面为晶体的滑移面,该晶体的ABCD 表面有一圆形标记,它与滑移面相交,标记左侧有一根位错线,试问当刃、螺位错线从晶体的左侧滑移至右侧时,表面的标记发生什么变化?并指出刃、螺位错滑移的切应力方向。 6.已知位错环ABCD 的柏氏矢量为b ,外应力τ和σ,如下图2所示,求: (1)位错环各边是什么位错? (2)设想在晶体中怎样才能得到这个位错? (3)在足够大的切应力τ作用下,位错环将如何运动? (4)在足够大的正应力σ作用下,位错环将如何运动? 图2 7.在图3晶体二维图形,晶格间距a ,含正刃位错和负刃位错,则: (1)围绕两个位错作柏氏回路,b =?; (2)围绕单个作柏氏回路,b =?(表明方向和强度)
第三章统计数据的整理作业 补充作业:教材P82,统计作图,第1题。 一、判断题.(正确的打“√”,错误的打“×”) 1.统计分组的关键在于分组标志的选择。() 2.分布数列由分组名称和各组的次数或频率组成。( ) 3.简单分组就是指对研究现象按一个标志进行的分组。( ) 4.对于离散型变量数列,只能编制单项数列,不能编制组距数列。() 二、单项选择题. 1、在全距一定的情况下,组距的大小与组数的多少成( ) A. 正比 B. 反比 C. 无比例关系 D. 有时成正比有时成反比 2、某连续变量数列,其末组为开口组,下限为200,又知其邻组的组中值为170, 末组的组中值为() A. 260 B. 215 C. 230 D. 185 3、一个等距数列末组为开口组,已知其下限为400,相邻组组距为50,则该组 的组中值为() A. 450 B. 425 C. 350 D. 325 4、按数量标志分组时,确定组距的基本原则是()。 A. 各组的组距应当相近或相等 B. 各组的组距应当有明显的差别 C. 要尽可能保持各组内的同质性和组间的差异性 D. 要尽可能分出组与组之间数量上的差异 5、统计分组的关键在于()。 A.确定组中值B.确定组距 C.确定组数D.选择分组标志和划分各组界限 6、变量数列是()。 A.按数量标志分组的数列B.按品质标志分组的数列 C.按数量标志或品质标志分组的数列D.按数量指标分组的数列 7、某同学统计学考试成绩为80分,应将其计入()。 A.成绩为80分以下人数中B.成绩为70~80分的人数中 C.成绩为80~90分的人数中D.根据具体情况来具体确定 8、在编制组距数列时,当资料中存在少数特大和特小的变量值时,宜采用() 形式处理。 A.开口组B.等距 C.闭口组D.不等距 9、组距、组限和组中值之间的关系是()。
习题3解答 判断题 1.栈和队列都是限制存取点的线性结构(TRUE) 2.栈和队列是两种重要的线性结构。( TRUE ) 3.带头结点的单链表形式的队列,头指针F指向队列的头结点,尾指针R指向队列的最后一个结点(TRUE) 4.在对不带头结点的链队列作出队操作时,不会改变头指针的值。(FALSE) 单项选择题: 5.若已知一个栈的入栈序列是1,2,3,…,n,其输出序列为p1,p2,p3,…,p n,若p1=n,则p i为( )。 A.i B.n=i C.n-i+1 D.不确定 答:C [当p1=n,即n是最先出栈的,根据栈的原理,n必定是最后入栈的,那么输入顺序必定是1,2,3,…,n,则出栈的序列是n,…,3,2,1,所以答案是C。] 6.栈和队列的共同点是( )。 A.都是先进后出B.都是先进先出 C.只允许在端点处插入和删除元素D.没有共同点 答:C 7.若依次输入数据元素序列{a,b,c,d,e,f,g}进栈,出栈操作可以和入栈操作间隔进行,则下列哪个元素序列可以由出栈序列得到?( ) A.{d,e,c,f,b,g,a} B.{ f,e,g,d,a,c,b} C.{e,f,d,g,b,c,a} D.{ c,d,b,e,g,a,f} 答:A 8.一个栈的入栈序列是1,2,3,4,5,则下列序列中不可能的出栈序列是( ) A. 2,3,4,1,5 B. 5,4,1,3,2 C. 2,3,1,4,5 D. 1,5,4,3,2 答:B 9. 队列操作的原则是( ) A. 先进先出 B. 后进先出 C. 只能进行插入 D. 只能进行删除 答:A 10. 栈的插入与删除是在( )进行。 A.栈顶 B. 栈底 C. 任意位置 D. 指定位置 答:A 11.假设顺序栈的定义为: typedef struct { selemtype *base; /* 栈底指针*/ selemtype *top; /* 栈顶指针*/ int stacksize; /* 当前已分配的存储空间,以元素为单位*/ }sqstack; 变量st为sqstack型,则栈st为空的判断条件为()。 A.st.base == NULL B. st.top == st.stacksize
1.计算当压力增加到500×105Pa时锡的熔点的变化时,已知在105Pa下,锡的熔点为505K, 熔化热7196J/mol,摩尔质量为118.8×10-3kg/mol,固体锡的体积质量密度7.30×103kg/m,熔化时的体积变化为+2.7%。 2.考虑在一个大气压下液态铝的凝固,对于不同程度的过冷度,即:ΔT=1,10,100和 200℃,计算: (a)临界晶核尺寸; (b)半径为r*的晶核个数; (c)从液态转变到固态时,单位体积的自由能变化ΔG*(形核功); (d)从液态转变到固态时,临界尺寸r*处的自由能的变化ΔGv。 铝的熔点Tm=993K,单位体积熔化热Lm=1.836×109J/m3,固液界面比表面能δ=93mJ/m2,书中表6-4是121mJ/m2,原子体积V0=1.66×10-29m3。 3. (a)已知液态纯镍在1.013×105Pa(1个大气压),过冷度为319℃时发生均匀形核。设临界晶核半径为1nm,纯镍的熔点为1726K,熔化热Lm=18075J/mol,摩尔体积V=6.6cm3/mol,计算纯镍的液-固界面能和临界形核功。 (b)若要在2045K发生均匀形核,需将大气压增加到多少?已知凝固时体积变化ΔV=-0.26cm3/mol(1J=9.87×105 cm3.Pa)。 4. 纯金属的均匀形核率可以下式表示: 式中A≈1035,exp(-Q/kT)≈10-2,ΔG*为临界形核功,k为波耳兹曼常数,其值为1.38*10-23J/K (a)假设过冷度ΔT分别为20℃和200℃,界面能σ=2×10-5J/cm2,熔化热ΔHm=12600J/mol,熔点Tm=1000K,摩尔体积V=6cm3/mol,计算均匀形核率。 (b)若为非均匀形核,晶核与杂质的接触角θ=60°,则如何变化?ΔT为多少? (c) 导出r*与ΔT的关系式,计算r*=1nm时的ΔT/Tm。 5.试证明在同样过冷度下均匀形核时,球形晶核较立方晶核更易形成。 6. 证明任意形状晶核的临界晶核形成功ΔG*与临界晶核体积V*的关系: ΔGV——液固相单位体积自由能差。 7.绘图并推导纯金属的凝固驱动力⊿G=Lm⊿T/Tm。 8.合金中相平衡的条件是什么? 9.什么是相变?相变在材料研究中有何意义? 10.名词解释: 冷却曲线过冷现象过冷度结构起伏晶胚 晶核晶粒晶界形核率长大速度 均匀形核非均匀形核能量起伏光滑界面粗糙界面 11.纯金属液固转变的驱动力是什么?为什么说过冷度越大这个相变的驱动力也越大?12.试说明与气态金属相比,液态金属的性质更接近于固态金属。 13.液态金属的结晶过程是与的过程。 14.证明均匀形核的临界形核功等于表面能的1/3。 15.能否说明过冷度⊿T越大,相变的形核率就越大,为什么?
《有机化学》试题库(2016) 一、选择题 (一)单选题 1、不对称烯烃与卤化氢等极性试剂进行加成反应时,加成反应的产物应遵守( A )。 A 马氏规则 B 定位规则 C 反马氏规则 D 扎衣采夫规则 2、(CH 3)2CHCH 2Cl 与(CH 3)3CCl 之间是什么异构体:( A ) A .碳链异构 B. 位置异构 C. 官能团异构 D. 互变异构 3、下列各组化合物中有顺反异构体的是:(C ) CH 3 CH 3CH 2C CH 3 CH CCl 2CH 2CH 3CH 2CH CBrCl CH 3CH 2CH C CH 3CH 3 A. B. C.D. 4、下列哪种类型的化合物可用卢卡斯试剂鉴别( B ) A 、卤代烃 B 、伯、仲、叔醇 C 、醛酮 D 、烯烃 5、下列化合物中溶解性最大的是( B )。 A CH 3CH 2CH 2OH B CH 2(O H )CH 2 C H 2(O H ) C CH 3CH 2CH 3 D CH 3 OCH 2CH 3 6、下列化合物中,能发生银镜反应的是( D ) A 甲酸 B 乙酸 C 乙酸甲酯 D 丙酮 7、在食品及药品工业中,常采用( D )作防腐剂 A 碳酸氢钠 B 乙酸钠 C 亚硝酸钠 D 苯甲酸钠 8、下列四种化合物按碱性强弱排列正确的是( B )。 A.①>②>③>④ B.④>③>②>① C.②>①>③>④ D.②<①<③<④ 9、蛋白质是( C )物质。 A 酸性 B 碱性 C 两性 D 中性
CH 3CH CH 2CH 3OH CH 3C CH 2CH 3O CHO 10、下列与 CH 3 H CH 3CH 2OH 等同的分子是( A ) A CH 3 H HO CH 2CH 3B CH 3H CH 3CH 2OH C CH 3 H OH CH 2CH 3 D 11、烷烃的同系物通式符合( A )。 A . C n H 2n+2 B. C n H 2n C.C n H 2n-2 D.C n H 2n-6 12、单烯烃与单环烷烃的通式( A )。 A.相同 B.不同 C.差2个H D.以上都错 14、下列化合物中酸性最弱的是( A ) A 、CH 3COOH B 、FCH 2COOH C 、BrCH 2COOH D 、ClCH 2COOH 15、果糖属于( A )。 A.单糖 B.双糖 C.多糖 D.以上都错 16. 下列物质与卢卡斯试剂作用,最先出现浑浊的是………………( C ) A 伯醇 B 仲醇 C 叔醇 D 叔卤代烃 17.蒸馏乙醇时,采用的加热方式是…………………………………( B ) A .油浴 B.水浴 C. 沙浴 D.气浴 18. 炔烃中的叁键组成是……………………………………………( A ) A.一个П和两个σ键 B.两个П键和一个 σ键 C.三个П键 D.三个σ键 19、下列物质不能发生碘仿反应的是( B )。 A 、丁酮 B 、3-戊酮 C 、丙酮 D 、乙醛 20、用做消毒剂和防腐剂的福尔马林是( A )的水溶液。 A 甲醛 B 甲醇 C 甲酸 D 乙醇 22、下列化合物能溶于稀NaOH 的是:( C ) A 、苯甲醚 B 、 氯乙烯 C 、 对硝基苯酚 D 、 溴乙烯 24、下列物质既具有酸性又能发生银镜反应的是( A )。 A 甲酸 B 甲醛 C 丙酮 D 乙醛 25、下列物质中酸性最强的是( D ) A 碳酸 B 苯酚 C 水 D 乙酸 27.下列既能起碘仿反应,又能与NaHSO 3反应的是 ·········· ( ) A.CH 3CH 2CHO B.CH 3CH 2OH C. D. E. 28.苯与硝酸发生的反应属于 ···················· ( A ) A.亲电取代 B.亲核取代 C.亲电加成 D.亲核加成 E.氧化反应
3.1 随机电压信号()U t 在各不同时刻上是统计独立的,而且,一阶概率密度函数是高斯的、均值为0,方差为2,试求: (1)密度函数();f u t 、()1212,;,f u u t t 和 ()1212,,...,;,,...,k k f u u u t t t ,k 为任意整数; (2)()U t 的平稳性。 3.1解: (1) 2 1 (;)exp{}4u f u t =- 1,2121,12,222 12(;,)()()1 exp{}44 f u u t t f u t f u t u u π=+=- 1,212 ,1 2 1(, ,;,,)() 1exp{} 4 k k k i i i k i i f u u u t t t f u t u ====- ∏∑ (2)由于任意k 阶概率密度函数与t 无关,因 此它是严平稳的。也是严格循环平稳的;因为是高斯随机信号,所以()U t 也是广义平稳
的和广义循环平稳的。 3.2 3.3 3.4 已知随机信号()X t 和()Y t 相互独立且各自平稳,证明新的随机信号()()()Z t X t Y t =也是平稳的。 3.4解: ()X t 与()Y t 各自平稳,设[()]X m E X t =, [()] Y m E Y t =, ()[X()X()] X R E t t ττ=+, ()[Y()Y()]Y R E t t ττ=+ Z ()[Z()][()Y()][()][()]X Y m t E t E X t t E X t E Y t m m ===?=,为常数 (,)[Z()Z()][()Y()()Y()][X()()][Y()()]()()() Z X Y Z R t t E t t E X t t X t t E t X t E t Y t R R R τττττττττ+=+=++=+?+=?= ∴ ()Z R τ仅与τ 有关,故Z()()Y()t X t t =也是平稳
第3章贷款申请受理和贷前调查 一、单选题 (1)贷款发放的第一道关口为()。[2009年6月真题] A.贷前调查 B.信贷营销 C.贷款项目评估 D.不良贷款管理 答案A (2)面谈结束时,如经了解客户的贷款申请可以考虑,但不确定是否可受理,调查人员应()。「2009年6月真题] A.申报贷款 B.先做必要承诺,留住客户 C.不作表态 D.准备后续调查 答案D (3)发放公司贷款流程中,银行下列行为具有法律效力的是()。[2009年6月真题] A.银行表明贷款意向 B.出具贷款意向书 C.做出贷款承诺 D.告知客户 答案C (4)实务操作中,建议采用()方式进行现场调研,同时通过其他调查方法对考察结果加以证实。[2009年6月真题] A.多次检查 B.全面检查 C.突击检查 D.约见检查 答案C (5)下列各项中,可用来考察借款人与银行关系的项目是()。[2009年6月真题] A.借款人财务状况 B.借款人经济效益 C.不良贷款比率 D.借款人规模 答案C (6)一般情况下,最常用、最重要的贷前调查方法是()。 A.委托调查 B.搜索调查 C.现场调研
D.突击检查 答案C (7)公司信贷的借款人指()。 A.经工商行政管理机关(或主管机关)核准登记的自然人 B.经行政机关核准登记的企(事)业法人 C.经行政机关核准登记的自然人 D.经工商行政管理机关(或主管机关)核准登记的企(事)业法人 答案D (8)根据贷款安全性调查,良好的公司治理机制不包括下列哪一项()。 A.严格的目标责任制 B.科学的决策系统 C.创新的会计准则 D.清晰的发展战略 答案C (9)除国务院规定外,有限责任公司和股份有限公司对外股本权益性投资累计未超过其净资产总额的()。 A.30% B.40% C.50% D.60% 答案C (10)关于贷款合法合规性调查,不正确的是()。 A.对有限责任公司和股份有限公司对外股本权益性投资情况进行调查 B.对购销合同的真实性进行认定 C.对借款人的借款目的进行调查 D.认定借款人、担保人法人资格 答案A (11)()的主要目的在于确定是否能够受理该笔贷款业务,是否投入更多的时间和精力进行后续的贷款洽谈,以及是否需要正式开始贷前调查工作。 A.头脑风暴 B.内部意见反馈 C.合作洽谈 D.前期调查 答案D (12)()是银行受理借款人申请后,对借款人的信用等级以及借款的合法性、安全性、盈利性等情况进行调查,核实抵(质)押物、保证人情况,测定贷款风险度的过程。 A.搜寻调查
有机化学习题精选 第二章 烷烃 选择: 1.引起烷烃构象的原因就是( ) A 、 分子中的双键旋转受阻 B 、 分子中的单双键共轭 C 、 分子中的两个碳原子围绕碳碳单键作相对旋转 D 、 分子中有吸电子基团 2.丁烷的最稳定构象就是( ) A 、 全重叠式 B 、 部分重叠式 C 、 对位交叉式 D 、 邻位交叉式 3.下列化合物沸点最高的就是( ) A 、2-甲基己烷 B 、庚烷 C 、2-甲基庚烷 D 、3,3-二甲基戊烷 4.化合物HOCH 2-CH 2OH 的稳定构象就是 ( ) A. B. C. D. 5、 CH 3CH 22CH 22CH 3CH 3CHCH 3CH 2CH 3 CH 3 化合物 用系统命名法命名为( ) A 、3-甲基-3-乙基-6-异丙基辛烷 B 、2,2-二乙基-5-异丙基庚烷 C 、2,2,5-三乙基-6-甲基庚烷 D 、2,6-二甲基-3,6-二乙基辛烷 第三章 烯烃 选择: 1.下列具有顺反异构体的就是( ) A 、FCH=CH 2 B 、CH 3CH 2CH=CHCH 3 C 、CH 3CH=C(CH 3)2 D 、(CH 3)2C=C(CH 3)2 2.下列烯烃氢化热最大的就是( ) A 、反-3-己烯 B 、2-甲基-2-戊烯 C 、顺-3-己烯 D 、2,3-二甲-2-丁烯 3.下列哪种烯烃的氢化热最小?( ) A.E-2-丁烯 B.Z-2-丁烯 C. 1-丁烯 D.异丁烯 4 、 CH-CH 3化合物 在过氧化合物存在下与HBr 反应,主要产物是( ) A.1-苯基-2-溴丙烷 B.1-苯基-1-溴丙烷 C.1-苯基-3-溴丙烷 D.邻溴苯基丙烷
《有机化学》试题库(2016) 一、选择题 (一)单选题 1、不对称烯烃与卤化氢等极性试剂进行加成反应时,加成反应的产物应遵守(A)。A马氏规则B定位规则C反马氏规则D扎衣采夫规则 2、(CH3)2CHCH2Cl与(CH3)3CCl之间是什么异构体:(A) A.碳链异构 B. 位置异构 C. 官能团异构 D. 互变异构 3、下列各组化合物中有顺反异构体的是:(C ) CH3 CH3CH2 C CH3 CH CCl2 CH2CH3CH2CH CBrCl CH3CH2CH C CH3 CH3 A. B. C. D. 4、下列哪种类型的化合物可用卢卡斯试剂鉴别(B) A、卤代烃 B、伯、仲、叔醇 C、醛酮 D、烯烃 5、下列化合物中溶解性最大的是(B )。 A CH3CH 2CH2OH B CH2(O H)CH2 C H2(O H) C CH3CH2CH3 D CH3 OCH2CH3 6、下列化合物中,能发生银镜反应的是(D) A 甲酸B乙酸C乙酸甲酯D丙酮 7、在食品及药品工业中,常采用(D)作防腐剂 A碳酸氢钠B乙酸钠C亚硝酸钠D苯甲酸钠 8、下列四种化合物按碱性强弱排列正确的是( B )。 A.①>②>③>④ B.④>③>②>① C.②>①>③>④ D.②<①<③<④ 9、蛋白质是(C)物质。 A酸性 B 碱性C两性 D 中性 10、下列与 CH3 H CH3CH2OH 等同的分子是( A )
CH 3CH CH 2CH 3 OH CH 3 C CH 2CH 3 O CHO A CH 3 H HO CH 2CH 3B CH 3H CH 3CH 2OH C CH 3 H OH CH 2CH 3 D 11、烷烃的同系物通式符合( A )。 A . C n H 2n+2 B. C n H 2n C.C n H 2n-2 D.C n H 2n-6 12、单烯烃与单环烷烃的通式( A )。 A.相同 B.不同 C.差2个H D.以上都错 14、下列化合物中酸性最弱的是( A ) A 、CH 3COOH B 、FCH 2COOH C 、BrCH 2COOH D 、ClCH 2COOH 15、果糖属于( A )。 A.单糖 B.双糖 C.多糖 D.以上都错 16. 下列物质与卢卡斯试剂作用,最先出现浑浊的是………………( C ) A 伯醇 B 仲醇 C 叔醇 D 叔卤代烃 17.蒸馏乙醇时,采用的加热方式是…………………………………(B ) A .油浴 B.水浴 C.沙浴 D.气浴 18. 炔烃中的叁键组成是……………………………………………(A ) A.一个П和两个σ键 B.两个П键和一个σ键 C.三个П键 D.三个σ键 19、下列物质不能发生碘仿反应的是( B )。 A 、丁酮 B 、3-戊酮 C 、丙酮 D 、乙醛 20、用做消毒剂和防腐剂的福尔马林是( A )的水溶液。 A 甲醛 B 甲醇 C 甲酸 D 乙醇 22、下列化合物能溶于稀NaOH 的是:( C ) A 、苯甲醚 B 、氯乙烯 C 、对硝基苯酚 D 、 溴乙烯 24、下列物质既具有酸性又能发生银镜反应的是( A )。 A 甲酸 B 甲醛 C 丙酮 D 乙醛 25、下列物质中酸性最强的是( D ) A 碳酸 B 苯酚 C 水 D 乙酸 27.下列既能起碘仿反应,又能与NaHSO 3反应的是 ································· ( ) A.CH 3CH 2CHO B.CH 3CH 2OH C. D. E. 28.苯与硝酸发生的反应属于 ······························································· ( A ) A.亲电取代 B.亲核取代 C.亲电加成 D.亲核加成 E.氧化反应 29.下列说法有错误的是 ····································································· ( ) A.物质具有旋光性和对映异构体的条件是结构是手性分子 B.中性氨基酸的水溶液呈酸性
试题库一命名题 1. 2. 3. CH 3CH 2C(CH 2CH 3)2CH 2CH 3 4. CH 3CH 2CH(CH 3) CH 2CH (CH 3)2 5. 6. (CH 3)4C 7.(CH 3)3CCH 2Br 8. (CH 3)2CHCH 2CH 2CH(CH 2CH 3) 2 9. 10. 11.(CH 3CH 2)2C=CH 2 12. (CH 3)2CHCH 2CH=C(CH 3)2 13. 14. 15. 16. 17. 18. CH 3(CH 2)3CH(CH 2)3CH 3 C(CH 3)2CH 2CH(CH 3)2C C CH 32CH 3 CH 3CH 3CH 2CH 3CH 2CH 2CHCH 2CH 2CH 3CH 3C H C(CH 3)3(CH 3)2CH H CH 3CH 2-C-CH 2CH 2CH 3CHCH 3 C C H CH 2CH 2CH 3CH 3 CH 3CH 2 CH 3-C-CHCH 3 CH 3 Cl CH(CH 3)2CH 3CHCH 2CHCH 2Br C 2H 5CH 3C H 3)2C 2H 5CH 3CH 3CH 2 CH 3CH 2CH 2CH 3CH(CH 3)2C Br C 6H 5 H
19. 20.CH2=CHC≡CH 21.CH3CH=CHC≡CH 22.(CH3)2C=CH-C≡C-CH3 23.CH3CH (C2H5)C≡CCH3 24.(CH3) 3CC≡C-(CH2) 2-C (CH3) 3 25. 26.27.28.29.30.31.32.33.34. Cl Cl 3 H3C CH(CH3)2 H3C CH(CH3)2 CH3 Cl SO3H CH2CH2CH3 NO2 SO3H OH OH SO3H O2N NO2 OH CH3 COOH C Cl C F CH3 CH3
有机化学习题精选 第二章烷烃 选择: 1.引起烷烃构象的原因是() A. 分子中的双键旋转受阻 B. 分子中的单双键共轭 C. 分子中的两个碳原子围绕碳碳单键作相对旋转 D. 分子中有吸电子基团 2.丁烷的最稳定构象是() A. 全重叠式 B. 部分重叠式 C. 对位交叉式 D. 邻位交叉式 3.下列化合物沸点最高的是() A、2-甲基己烷 B、庚烷 C、2-甲基庚烷 D、3,3-二甲基戊烷 4.化合物HOCH2-CH2OH的稳定构象是() A. B. C. D. 5. CH3CH22CH22CH3 CH3CHCH3CH2CH3 CH3 化合物用系统命名法命名为() A、3-甲基-3-乙基-6-异丙基辛烷 B、2,2-二乙基-5-异丙基庚烷 C、2,2,5-三乙基-6-甲基庚烷 D、2,6-二甲基-3,6-二乙基辛烷 第三章烯烃 选择: 1.下列具有顺反异构体的是() A、FCH=CH2 B、CH3CH2CH=CHCH3 C、CH3CH=C(CH3)2 D、(CH3)2C=C(CH3)2 2.下列烯烃氢化热最大的是() A、反-3-己烯 B、2-甲基-2-戊烯 C、顺-3-己烯 D、2,3-二甲-2-丁烯 3.下列哪种烯烃的氢化热最小?() A.E-2-丁烯B.Z-2-丁烯C.1-丁烯D.异丁烯 4. CH-CH3 化合物在过氧化合物存在下与HBr反应,主要产物是( ) A.1-苯基-2-溴丙烷B.1-苯基-1-溴丙烷C.1-苯基-3-溴丙烷D.邻溴苯基丙烷
5. CH3 化合物 H3C C(CH3)3 H H H 命名为( ) A.(2Z,4E)-4-叔丁基-2,4-己二烯B.(2E,4Z)-3-叔丁基-2,4-己二烯C.(2Z,4E)-3-叔丁基-2,4-己二烯D.(2E,4Z)-4-叔丁基-2,4-己二烯6.关于烯烃的催化加氢反应,下列叙述错误的是() A.催化加氢反应是在催化剂表面进行的B.催化加氢反应是定量进行的C.催化加氢反应是反式加成D.催化加氢反应是放热的 方程式: 1.CH3CH=CCH2CH32622 H2O CH3 2.CH3CH=CCH2CH33 CH3 3.CH3CH=CCH2CH CH3 HBr / ROOR 4.CH3CH=CH2 + Cl2 500o C 5.CH3CH2CH=CH2 + H2SO4 2 第四章炔烃二烯烃 选择: 1.丁二烯与下列烯烃衍生物进行Diels-Alder反应最活泼的是() CH2Cl CN CH3OCH 3 A. B. C. D. 2.下列二烯烃氢化热最小的是() A. 1,2-丁二烯 B. 1,4-戊二烯 C. 1,3-丁二烯 D. 1,3-戊二烯 3.下列二烯烃最稳定的是() A. 1,2-丁二烯 B. 1,4-戊二烯 C. 1,3-丁二烯 D. 1,3-戊二烯 4. 下列碳正离子最稳定的是()
Test Bank—Chapter Three (Operating Systems) Multiple Choice Questions 1. Which of the following components of an operating system maintains the directory system? A. Device drivers B. File manager C. Memory manager ANSWER: B 2. Which of the following components of an operating system handles the details associated with particular peripheral equipment? A. Device drivers B. File manager C. Memory manager ANSWER: A 3. Which of the following components of an operating system is not part of the kernel? A. Shell B. File manager C. Scheduler ANSWER: A 4. Multitasking in a computer with only one CPU is accomplished by a technique called A. Bootstrapping B. Batch processing C. Multiprogramming ANSWER: C 5. Execution of an operating system is initiated by a program called the A. Window manager B. Scheduler C. Bootstrap ANSWER: C 6. The end of a time slice is indicted by the occurrence of a signal called A. An interrupt B. A semaphore C. A login ANSWER: A 7. A section of a program that should be executed by at most one process at a time is called a A. Utility B. Critical region C. Privileged instruction ANSWER: B 8. Which of the following is not an attempt to provide security? A. Passwords B. Privilege levels C. Multitasking ANSWER: C
目录 第一章绪论习题答案第二章开链烃 一、学习要求 二、本章要点 三、问题参考答案 四、习题参考答案 第三章环烃 一、学习要求 二、本章要点 三、问题参考答案 四、习题参考答案 第四章对映异构 一、学习要求 二、本章要点 三、问题参考答案 四、习题参考答案 第五章卤代烃 一、学习要求 二、本章要点 三、问题参考答案 四、习题参考答案 第六章醇酚醚 一、学习要求 二、本章要点 三、问题参考答案 四、习题参考答案 第七章醛酮醌 一、学习要求 二、本章要点 三、问题参考答案 四、习题参考答案 第八章羧酸及其衍生物 一、学习要求 二、本章要点 三、问题参考答案 四、习题参考答案 第九章羟基酸和酮酸 一、学习要求 二、本章要点 三、问题参考答案 四、习题参考答案第十章含氮与含磷化合物 一、学习要求 二、本章要点 三、问题参考答案 四、习题参考答案 第十一章杂环化合物 一、学习要求 二、本章要点 三、问题参考答案 四、习题参考答案 第十二章脂类 一、学习要求 二、本章要点 三、问题参考答案 四、习题参考答案 第十三章糖类 一、学习要求 二、本章要点 三、问题参考答案 四、习题参考答案 第十四章蛋白质和核酸 一、学习要求 二、本章要点 三、问题参考答案 四、习题参考答案 第十五章医用高分子 一、学习要求 二、本章要点 三、问题参考答案 四、习题参考答案 综合练习题(一) 综合练习题(一)参考答案综合练习题(二) 综合练习题(二)参考答案综合练习题(三) 综合练习题(三)参考答案综合练习题(四) 综合练习题(四)参考答案综合练习题(五) 综合练习题(五)参考答案
有机化学题库 第一章 烷烃(试题及答案) 一、命名下列化合物: 1.CH CH 3CH 3 C CH 2CH 23CH 3CH 3 2. C 2H 5CH 3CH 3C CH 2CH 2CH 33CH 2CH 2 2,2,3-甲基己烷 4,4-二甲基-5-乙基辛烷 3. C 2H 5CHCH CH 3CH 3 CH 3 4. CH C 2H 5CH CH 33CH 2CH 2CH 3CH 3CH 2 2,3-二甲基戊烷 2,6-二甲基-3-乙基辛烷 5. CH C 2H 5CH CH CH 33 CH 3 CH 3CH 2 6.CH C 2H 5CH CH CH 3CH 3C 2H 5CH 3CH 2 2,4-二甲基-3-乙基己烷 2,5-二甲基-3-乙基庚烷 7. CH C 2H 5CH CH 3CH 3 2CH 2CH 3 CH 2CH 2CH 3 8.CH 2CH 3C (C 2H 5)2(CH 3) 2,6-二甲基-5-乙基壬烷 3-甲基-3-乙基戊烷 9. CH 2CH 2CH CH 2CH 3 CH CH 332CH 2CH 3 10. (CH 3)2CH CH 2CH 2(C 2H 5)2 3-甲基-5-乙基辛烷 2-甲基-5-乙基庚烷 二、写出下列化合物的结构式: 1. 2,2,4-三甲基戊烷 2. 4-甲基-5-异丙基辛烷 (CH 3)3CCH 2CH(CH 3)2 CH 2CH 2CH CH CH 33CH 2CH(CH 3)2 2CH 3
Chapter 3 Foundations of Planning 预习、复习练习题目 单项选择题 1.Planning involves defining the organization’s goals, establishing an overall strategy for achieving those goals, and developing a comprehensive set of plans _____________. a. as to which shift will perform what work functions b. to determine which manager will be in charge of which department c. to integrate and coordinate work activities d. to establish the quality and quantity of work to be accomplished 2.Planning gives direction, reduces the impact of change, minimizes waste and redundancy, and __________. a. establishes the workloads for each of the departments b. sets the basis used for promotion of individuals within the organization c. eliminates departments that are not needed within the plan d. sets the standards used in the management process of controlling 3.Planning can’t eliminate change. Managers plan in order to ___________. a. be prepared when changes in management at the top occur b. look ahead and develop the most effective response to changes c. decide what needs to be done when a change in environments happen d. have the appropriate materials available when the demand for them comes about 4.One criticism of formal planning is that it focuses managers’ attention on _________. a. the changing future b. today’s competition c. tomorrow’s survival d. yesterday’s successes and failures 5.The most common ways to describe organizational plans are by their frequency of use, time frame, specificity, and ___________. a. quantifiability b. flexibility c. breadth d. attainability 6.Strategic plans include the formulation of goals, whereas tactical plans define ways to _____________. a. maximize the organization’s profits b. achieve the goals c. minimize the number of employees that have to be laid off in hard times d. provide the most efficient methods of production
201.下列化合物中哪些可能有顺反异构体?( ) A : CHCl=CHCl ; B :CH 2=CCl 2 ; C :1-戊烯; D :2-甲基-2-丁烯 202.烯烃与卤素在高温或光照下进行反应,卤素进攻得主要位置是:( ) A : 双键C 原子; B :双键的α-C 原子 ; C :双键的β-C 原子; D :叔C 原子 203.(Z )-2-丁烯加溴得到的产物是:( ) A : 赤式,内消旋体; B :苏式,内消旋体; C : 赤式,一对d l ; D :苏式,一对d l 204.(Ⅰ) CH 3CH 2CH 2CH 2+;(Ⅱ) CH 3CH +CH 2CH 3 ;(Ⅲ) (CH 3)3C + 三种碳正离子 稳定性顺序如何?( ) A : Ⅰ>Ⅱ>Ⅲ; B :Ⅲ>Ⅱ>Ⅰ ; C : Ⅱ>Ⅰ>Ⅲ; D :Ⅱ>Ⅲ>Ⅰ 205.HBr 与3,3-二甲基-1-丁烯加成生成2,3-二甲基-2-溴丁烷的反应机理是什么?( ) A : 碳正离子重排; B :自由基反应 ; C :碳负离子重排; D :1,3迁移 206.下列化合物中,分子间不能发生羟醛缩合反应的是:( ) O (CH 3)2CHCHO C 2CH 3 CHO 207.(S)-α-HCN 加成然后进行水解得主要产 物是?( COOH C 2H 5 HO CH 3 H H COOH 2H 5HO CH 3H H COOH 2H 5 CH 3H H H COOH 2H 5CH 3H H OH 208.下列反应,都涉及到一个碳正离子的重排,如迁移碳是一个手性碳,则在 迁移过程中,手性碳的构型发生翻转的反应是:( ) A :贝克曼重排; B :拜尔—维利格氧化; C :片哪醇重排; D :在加热条件下,C(1,3)σ同面迁移 209.苯乙酮 主要得到下列何种产物? ( ) CF 3COOOH CHCl 3
`0346 07A2 要合成甲基叔丁基醚,下列诸合成路线中,最佳合成路线是( ) (A ) CH 3C OH CH 3CH 3 与CH 3OH 及浓硫酸共热。 (B ) CH 3 C Br CH 3 CH 3 与CH 3ON a 共热。 (C )CH 3Br 与 CH 3 CH 3CH 3C ONa 共热。 (D ) CH 3C OH CH 3 CH 3 与CH 3OH 在Al 2O 3存在下共热。 `0349 07A2 下列醇中,最易脱水成烯烃的是( ) (A )OH (B )CHCH 3OH (C )CH 3CH CH CH 3 CH 3 OH (D ) CH 3CH 2 CH CH 3 OH `0350 07A1 下列物质下,不能溶于冷的浓硫酸中的是( ) (A )溴乙烷 (B )乙醇 (C )乙醚 (D )乙烯 `0351 07A1 乙烯中混有少量乙醚杂质,可使用的除杂质试剂是( ) (A )浓硫酸 (B )高锰酸钾溶液 (C )浓盐酸 (D )氢氧化钠溶液 `0352 07A2 下列反应中,属于消除反应的是( ) (A )溴乙烷与氢氧化钠水溶液共热 (B )溴乙烷与氢氧化钠醇溶液共热 (C )乙醇与浓硫酸加热到170℃制乙烯 (D )乙醇与浓硫酸加热到140℃制乙醚 `0353 07A1 下列各组液体混和物能用分液漏斗分开的是( ) (A )乙醇和水 (B )四氯化碳和水 (C )乙醇和苯 (D )四氯化碳和苯 `0356 07B2 写出该结构式的系统命名: `0358 07B2
写出该结构式的系统命名: `0360 07B2 写出该化合物的构造式:对硝基苄基苯甲醚`0362 07B2 写出该化合物的构造式:2,3-二甲氧基丁烷 `0364 07C1 用简便且有明显现象的方法鉴别下列各组化合物 CH2OH OH CH3 `0365 07C2 用简便且有明显现象的方法鉴别下列各组化合物 CH3CH2OCH2CH3 , CH3CH2CH2CH2OH , CH3(CH2)4CH3 `0366 07C1 `0370 07C1 完成下列各反应: `0371 07C1 用简单的化学方法区别以下各组化合物 正丁醇,甲丙醚,环已烷。 `0372 07C2 用简单的化学方法区别以下各组化合物 乙苯,苯乙醚,苯酚,1-苯基乙醇。 `0373 07C1 试用适当的方法结合将下列混合物中的少量杂质除去。 乙醚中含有少量乙醇。 `0375 07C2