大型汽轮机组DEH系统电液伺服阀的应用及维护
【摘要】电液伺服阀是DEH系统的关键部件,其工作状况直接影响汽轮发电机组的可靠性。通过对电液伺服阀的结构及运行特性的分析,阐述了各种电液伺服阀的结构特点和应用状况,供汽轮机电调系统检修和运行人员操作调整参考。【关键词】汽轮机电液调节系统电液伺服阀
Application and Maintenance of Electrohydraulic Servo Valve in DEH System of Large Size Generating Units
Abstract Electrohydraulic servo valve is a key component of DEH system. Its working condition directly influences the reliability of steam turbine-generator unit. Through the analysis of structure and operation characteristics of electrohydraulic servo valve, the structure features and application status of various electrohydraulic servo valve are elaborated.
Key words steam turbine electrohydraulic regulation system electrohydraulic servo valve
300 MW以上机组广泛采用数字电液调节系统(DEH),提高了汽轮机运行的可靠性和经济性。电液伺服阀是机组DEH系统关键部件,其工作可靠性将直接影响到机组的安全稳定运行。通过对DEH系统的运行分析以及参考检修电液伺服阀的经验,发现DEH系统中的许多故障如汽门摆动、拒开、拒关等均与电液伺服阀的工作状况有关。例如华北某电厂300 MW机组一段时间里常发生汽门摆动,引起机组负荷摆动,经查是由于伺服阀高频振荡引起;再如南方某电厂300 MW机组启动过程中,由于伺服阀的卡涩,使汽轮机从1 500 r/min突然冲至 3 000 r/min,非常危险。从统计分析看,引起伺服阀故障的原因较多,除与油质及其使用环境有关外,还与伺服阀自身的结构形式、性能参数的稳定性 有关。
1 DEH系统中伺服阀的应用状况及特点
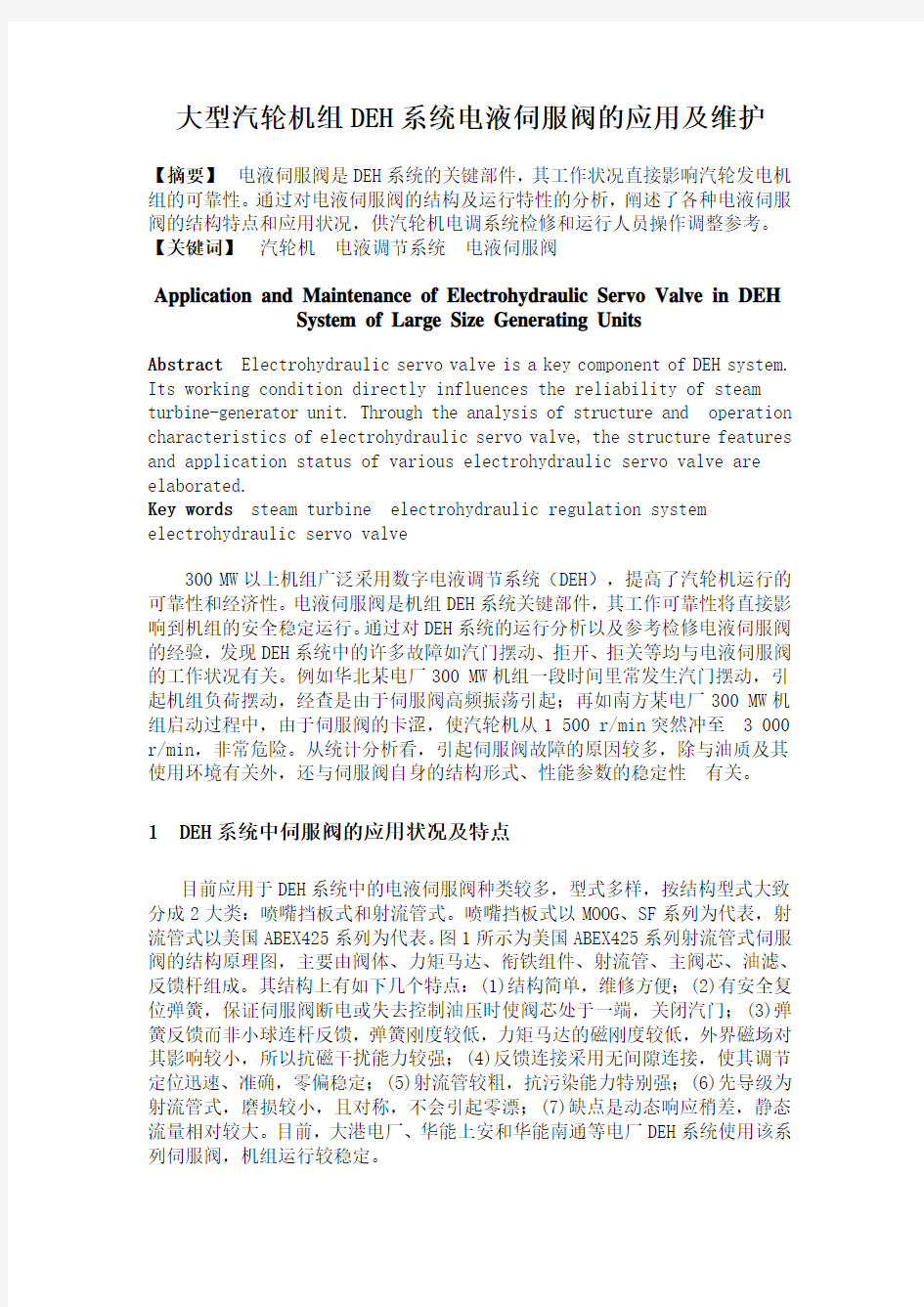
目前应用于DEH系统中的电液伺服阀种类较多,型式多样,按结构型式大致分成2大类:喷嘴挡板式和射流管式。喷嘴挡板式以MOOG、SF系列为代表,射流管式以美国ABEX425系列为代表。图1所示为美国ABEX425系列射流管式伺服阀的结构原理图,主要由阀体、力矩马达、衔铁组件、射流管、主阀芯、油滤、反馈杆组成。其结构上有如下几个特点:(1)结构简单,维修方便;(2)有安全复位弹簧,保证伺服阀断电或失去控制油压时使阀芯处于一端,关闭汽门;(3)弹簧反馈而非小球连杆反馈,弹簧刚度较低,力矩马达的磁刚度较低,外界磁场对其影响较小,所以抗磁干扰能力较强;(4)反馈连接采用无间隙连接,使其调节定位迅速、准确,零偏稳定;(5)射流管较粗,抗污染能力特别强;(6)先导级为射流管式,磨损较小,且对称,不会引起零漂;(7)缺点是动态响应稍差,静态流量相对较大。目前,大港电厂、华能上安和华能南通等电厂DEH系统使用该系列伺服阀,机组运行较稳定。
图1 ABEX425射流管式伺服阀结构原理图
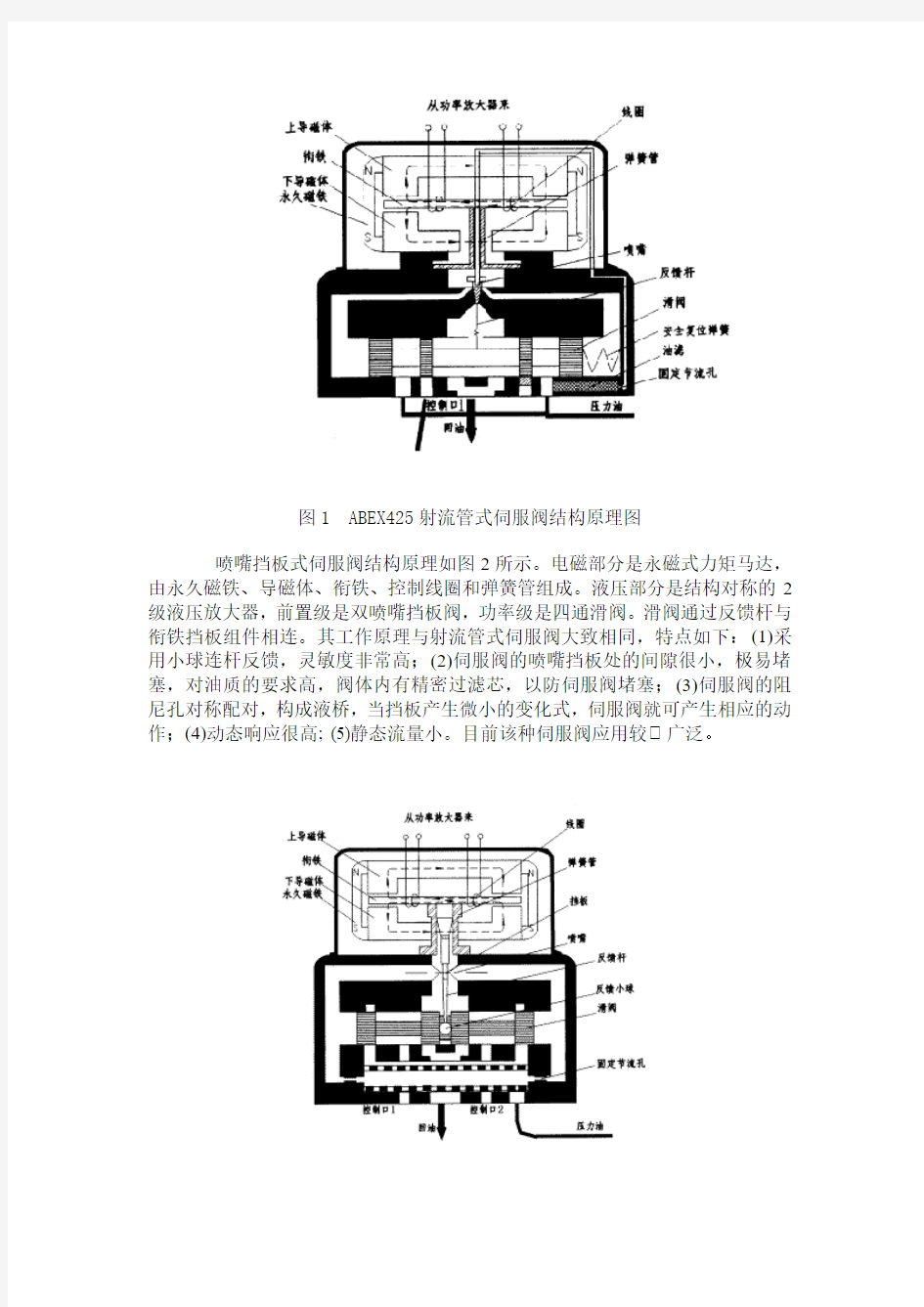
喷嘴挡板式伺服阀结构原理如图2所示。电磁部分是永磁式力矩马达,由永久磁铁、导磁体、衔铁、控制线圈和弹簧管组成。液压部分是结构对称的2级液压放大器,前置级是双喷嘴挡板阀,功率级是四通滑阀。滑阀通过反馈杆与衔铁挡板组件相连。其工作原理与射流管式伺服阀大致相同,特点如下:(1)采用小球连杆反馈,灵敏度非常高;(2)伺服阀的喷嘴挡板处的间隙很小,极易堵塞,对油质的要求高,阀体内有精密过滤芯,以防伺服阀堵塞;(3)伺服阀的阻尼孔对称配对,构成液桥,当挡板产生微小的变化式,伺服阀就可产生相应的动作;(4)动态响应很高; (5)静态流量小。目前该种伺服阀应用较 广泛。
图2 喷嘴挡板式伺服阀结构原理图
喷嘴挡板式伺服阀的优点是灵敏度高,动态响应快,线性度好,其缺点是容易被脏物堵塞,抗污染能力差,对油液的洁净度要求高;射流管式伺服阀的优点是抗污染能力强,可靠性高,压力效率和容积效率高,寿命长,不会引起零漂,其缺点是零位泄漏量稍大,低温特性差,频率响应低,但足以满足汽轮机调节保安系统的需要。
2 DEH系统中伺服阀的主要故障现象及原因
通过现场调研及对伺服阀的检测,发现DEH系统中电液伺服阀常出现以下几种典型故障,现列于表1。
3 采取的技术措施
通过多年对DEH系统的研究和对伺服阀的检测、维修,发现由油质污染造成伺服阀卡涩故障的约占40%;由伺服阀本身的结构特性引起的伺服阀振动,导致汽门摆动的约占10%;由磨损引起泄漏增大故障的约占10%左右;零偏不稳的约占5%,其它故障约占35%,解决上述问题应注意以下几点:
表1DEH系统中电液伺服阀的常见故障
3.1加强油质管理
DEH系统普遍采用磷酸酯抗燃油,由于这类油是一种人工合成的物质,在使用过程中极易劣化,主要表现为污染颗粒度的增加和酸值升高。DEH系统用抗燃油一般要求达到MOOG2级,酸值KOH应小于0.2‰。抗燃油污染颗粒度增加,极易造成伺服阀卡涩,同时,使阀芯的磨损,泄漏增加。通过几年来对抗燃油的油质分析和处理,发现抗燃油酸值的升高,对伺服阀部件产生腐蚀作用,特别是对伺服阀阀芯及阀套锐边的腐蚀,这是使伺服阀泄漏增加的主要原因。为此,要定期化验油质,同时加强油液进货渠道管理,补油时要使用专用的滤油设备,
在系统中安装在线运行的再生装置。
3.2加强对伺服阀的管理
由于伺服阀的规格型号较多,要根据机组DEH系统要求,选用合适的伺服阀,尽量选用原机组中同规格型号的伺服阀;伺服阀在工作一定时间后,要定期利用专用试验设备进行检测,普通的冲洗台尽管也可以冲洗堵塞的伺服阀,但不能对伺服阀的性能进行定量的分析,不能判断伺服阀的性能指标是否能满足运行要求,也不能解决伺服阀的其它故障,通过专用的试验设备对伺服阀的性能参数的调整及清洗,使伺服阀始终处于最佳工作状态,防止伺服阀突发事故,不但可以延长伺服阀的使用寿命,还可防患于未然。
3.3改善伺服阀的工作环境
通过对故障阀的使用现场所作的调查,发现伺服阀工作处的环境温度高达60 ℃以上,伺服阀长期在高温下工作,对力矩马达的工作特性有较大影响,直接影响伺服阀的特性。
3.4严禁使用与抗燃油不相符的材质
经调研及对伺服阀的检测,发现有些电厂伺服阀使用丁晴橡胶密封件,不但引起伺服阀泄漏,同时使抗燃液变质;再如,DEH系统中蓄能器使用丁晴橡胶囊,同样造成抗燃液变质。
4 结束语
电液伺服阀作为DEH系统的关键部件,其性能的优劣及稳定性直接影响机组的安全运行,加强对伺服阀的管理,对新购伺服阀进行检测与参数调整,运行中的伺服阀定期检测,并采取在线运行的再生装置防止抗燃液老化变质,对DEH 系统乃至整个机组的安全运行尤为重要。
第二章 思考题 1、为什么把液压控制阀称为液压放大元件? 答:因为液压控制阀将输入的机械信号(位移)转换为液压信号(压力、流量)输出,并进行功率放大,移动阀芯所需要的信号功率很小,而系统的输出功率却可以很大。 2、什么是理想滑阀?什么是实际滑阀? 答: 理想滑阀是指径向间隙为零,工作边锐利的滑阀。 实际滑阀是指有径向间隙,同时阀口工作边也不可避免地存在小圆角的滑阀。 4、什么叫阀的工作点?零位工作点的条件是什么? 答:阀的工作点是指压力-流量曲线上的点,即稳态情况下,负载压力为p L ,阀位移x V 时,阀的负载流量为q L 的位置。 零位工作点的条件是 q =p =x =0L L V 。 5、在计算系统稳定性、响应特性和稳态误差时,应如何选定阀的系数?为什么? 答:流量增益q q = x L V K ??,为放大倍数,直接影响系统的开环增益。 流量-压力系数c q =- p L L K ??,直接影响阀控执行元件的阻尼比和速度刚度。 压力增益p p = x L V K ??,表示阀控执行元件组合启动大惯量或大摩擦力负载的能力 当各系数增大时对系统的影响如下表所示。 7、径向间隙对零开口滑阀的静态特性有什么影响?为什么要研究实际零开口滑阀的泄漏特性? 答:理想零开口滑阀c0=0K ,p0=K ∞,而实际零开口滑阀由于径向间隙的影响,存在泄漏 流量2c c0r = 32W K πμ ,p0c K ,两者相差很大。
理想零开口滑阀实际零开口滑阀因有径向间隙和工作边的小圆角,存在泄漏,泄漏特性决定了阀的性能,用泄漏流量曲线可以度量阀芯在中位时的液压功率损失大小,用中位泄漏流量曲线来判断阀的加工配合质量。 8、理想零开口阀具有线性流量增益,性能比较好,应用最广泛,但加工困难;因为实际阀总存在径向间隙和工作边圆角的影响。 9、什么是稳态液动力?什么是瞬态液动力? 答:稳态液动力是指,在阀口开度一定的稳定流动情况下,液流对阀芯的反作用力。 瞬态液动力是指,在阀芯运动过程中,阀开口量变化使通过阀口的流量发生变化,引起阀腔内液流速度随时间变化,其动量变化对阀芯产生的反作用力。 习题 1、有一零开口全周通油的四边滑阀,其直径-3 d=810m ?,径向间隙-6c r =510m ?,供油压力5s p =7010a P ?,采用10号航空液压油在40C 。 工作,流量系数d C =0.62,求阀的零位 系数。 解:零开口四边滑阀的零位系数为: 零位流量增益 q0d K C =零位流量-压力系数 2c c0r 32W K πμ = 零位压力增益 p0c K = 将数据代入得 2q0 1.4m s K = 123c0 4.410m s a K P -=?? 11p0 3.1710a m K P =? 2、已知一正开口量-3 =0.0510m U ?的四边滑阀,在供油压力5s p =7010a P ?下测得零位泄 露流量c q =5min L ,求阀的三个零位系数。 解:正开口四边滑阀的零位系数为: 零位流量增益 c q0q K U = 零位流量-压力系数 c c0s q 2p K =
电液比例阀就是阀内比例电磁铁输入电压信号产生相应动作,使工作阀阀芯产生位移,阀口尺寸发生改变并以此完成与输入电压成比例压力、流量输出元件。阀芯位移也可以以机械、液压或电形式进行反馈。电液比例阀具有形式种类多样、容易组成使用电气及计算机控制各种电液系统、控制精度高、安装使用灵活以及抗污染能力强等多方面优点,应用领域日益拓宽。近年研发生产插装式比例阀与比例多路阀充分考虑到工程机械使用特点,具有先导控制、负载传感与压力补偿等功能。它出现对移动式液压机械整体技术水平提升具有重要意义。特别就是电控先导操作、无线遥控与有线遥控操作等方面展现了其良好应用前景。 2 工程机械电液比例阀种类与形式 电液比例阀包括比例流量阀、比例压力阀、比例换向阀。工程机械液压操作特点,以结构形式划分电液比例阀主要有两类:一类就是螺旋插装式比例阀(screwin cartridge proportional valve),另一类就是滑阀式比例阀(spool proportional valve)。 螺旋插装式比例阀就是螺纹将电磁比例插装件固定油路集成块上元件,螺旋插装阀具有应用灵活、节省管路与成本低廉等特点,近年来工程机械上应用越来越广泛。常用螺旋插装式比例阀有二通、三通、四通与多通等形式,二通式比例阀主比例节流阀,它常它元件一起构成复合阀,对流量、压力进行控制;三通式比例阀主比例减压阀,也就是移动式机械液压系统中应用较多比例阀,它主对液动操作多路阀先导油路进行操作。利用三通式比例减压阀可以代替传统手动减压式先导阀,它比手动先导阀具有更多灵活性与更高控制精度。可以制成如图1所示比例伺服控制手动多路阀,不同输入信号,减压阀使输出活塞具有不同压力或流量进而实现对多路阀阀芯位移进行比例控制。四通或多通螺旋插装式比例阀可以对工作装置实现单独控制。 滑阀式比例阀又称分配阀,就是移动式机械液压系统最基本元件之一,就是能实现方向与流量调节复合阀。电液滑阀式比例多路阀就是比较理想电液转换控制元件,它保留了手动多路阀基本功能,还增加了位置电反馈比例伺服操作与负载传感等先进控制手段。它就是工程机械分配阀更新换代产品。 出于制造成本考虑与工程机械控制精度要求不高特点,一般比例多路阀内不配置位移感应传感器,具有电子检测与纠错功能。,阀芯位移量容易受负载变化引起压力波动影响,操作过程中要靠视觉观察来保证作业完成。电控、遥控操作时更应注意外界干涉影响。近来,电子技术发展,人们越来越多采用内装差动变压器(LDVT)等位移传感器构成阀芯位置移动检测,实现阀芯位移闭环控制。这种由电磁比例阀、位置反馈传感器、驱动放大器与其它电子电路组成高度集成比例阀,具有一定校正功能,可以有效克服一般比例阀缺点,使控制精度到较大提高。 3 电液比例多路阀负载传感与压力补偿技术 节约能量、降低油温与提高控制精度,同时也使同步动作几个执行元件运动时互不干扰,现较先进工程机械都采用了负载传感与压力补偿技术。负载传感与压力补偿就是一个很相似概念,都就是利用负载变化引起压力变化去调节泵或阀压力与流量以适应系统工作需求。负载传感对定量泵系统来讲就是将负载压力负载感应油路引至远程调压溢流阀上,当负载较小时,溢流阀调定压力也较小;负载较大,调定压力也较大,但也始终存一定溢流损失。变量泵系统就是将负载传感油路引入到泵变量机构,使泵输出压力随负载压力升高而升高(始终为较小固定压差),使泵输出流量与系统实际需要流量相等,无溢流损失,实现了节能。 压力补偿就是提高阀控制性能而采取一种保证措施。将阀口后负载压力引入
电液伺服技术的发展与未来展望 电液伺服系统的特点 电液伺服系统有许多优点,其中最突出的就是响应速度快、输出功率大、控制精确性高,因而在航空、航天、军事、冶金、交通、工程机械等领域得到了广泛的应用。人类使用水利机械及液压传动虽然已有很长的历史,但液压控制技术的快速发展却还是近几十年的事,随着电液伺服阀的诞生,使液压伺服技术进入了电液伺服时代,其应用领域也得到广泛的扩展。随着现代科学技术特别是材料科学的发展,人们更加重视动态试验。而电液伺服技术是实现动态高周疲劳、程控疲劳和低周疲劳以及静态的恒变形速率、恒负荷速率和各种模拟仿真试验系统的最佳技术手段。 国内电液伺服试验机的起步 国外试验机同行在电液伺服技术的应用和研制起步较早,自二十世纪50年代中期以来就先后生产了各种使用电液伺服系统的试验机,如美国MTS、英国Instron、瑞士Amsler(现在分为瑞士RUMUL和瑞士W+B试验机公司)、德国Sehench和日本岛津等公司都先后研制成功各种电液伺服试验机。当时我国在这个应用领域还是空白,使用的电液伺服试验机都是从这些国家进口的。 我国试验机厂家是在上世纪70年代初才开始研制电液伺服试验机,长春试验机研究所、长春试验机厂、红山试验机厂和济南试验机厂等开始进行研制。在国家财力的支持下,先后都成功地开发出电液伺服动静试验机,并开始在国内应用。正是通过当时这段时间的成功实践,培养锻炼出一批技术人员,创建了我国今后电液伺服技术发展的平台,奠定了国内在该技术领域的基础。 国内电液伺服试验机的发展阶段 国内电液伺服试验机的发展按照产品发展时期的特点大致划分成两个阶段:即自主发展阶段和与国外合作发展阶段。 自主发展阶段:二十世纪70年代末期到二十世纪90年代初期,国内的电液伺服试验机都是以自主开发为主。主要是集中在国内几个有实力的试验机厂家,如长春试验机研究所、长春试验机厂、红山试验机厂和济南试验机厂等。这个时期的主要代表性的产品有:1983年长春试验机研究所研制的2000kN电液伺服岩石压力试验机,该设备采用高压容器作为围压,模拟试样的真实受力情况。是三轴动静试验机的代表性产品,并首次把计算机引入电液伺服试验机的控制。1984年长春试验机研究所研制的3000kN电液伺服双缸卧式拉力试验机。该项目中首次应用静压支撑技术,成功地在两个卧式伺服油缸上实现静压支撑。另外,还首次应用了伺服同步技术,实现双缸系统的同步跟踪和精确定位。双缸的同步
电液伺服阀基础知识介绍 射流管式电液伺服阀与喷嘴挡板式电液伺服阀是目前世界上运用最普遍的典型两级流量控制伺服阀。博格公司的DSHR一级先导就是射流管阀,而派克公司的TDL一级先导就是喷嘴挡板阀,下面对两种阀的结构、工作原理及特点作个比较与介绍。并着重分析了射流管式伺服阀在可靠性及工作性能方面的一些优势。 工作原理: ★喷嘴挡板式伺服阀的原理:TDL 图1 为喷嘴挡板式伺服阀的原理图。它主要由力矩马达、喷嘴挡板式液压放大器、滑阀式功率级及反馈杆组件构成。其工作过程为:输入到力矩马达线圈的电气控制信号在衔铁两端产生磁力,使衔铁挡板组件偏转。挡板的偏移将一侧喷嘴挡板可变节流口减小,液流阻力增大,喷嘴的背压升高;而另一侧的可变节流口增大,液流阻力减小,液流的背压降低。这样可得到与挡板位置变化相对应的喷嘴背压,此背压加到与与喷嘴腔相通的阀芯端部,推动阀芯移动。而阀芯又推动反馈杆端部的小球,产生反馈力矩作用在衔铁挡板组件上。当反馈力矩逐渐等于电磁力矩时,衔铁挡板组件被逐渐移回到对中的位置。于是,阀芯停留在某一位置。在该位置上,反馈杆的力矩等于输入控制 电流产生的的力矩,因此,阀芯位置与输入控制电流大小成正比。当供油压力及负载压力为一定时,输出到负载的流量与阀芯位置成正比。 图1双喷嘴挡板式力反馈电液流量伺服阀
★射流管式伺服阀的原理: 图2 为射流管式伺服阀的原理图。力矩马达采用永磁结构,弹簧管支承着衔铁射流管组件,并使马达与液压部分隔离,所以力矩马达是干式的。前置级为射流放大器,它由射流管与接受器组成。当马达线圈输入控制电,在衔铁上生成的控制磁通与永磁磁通相互作用,于是衔铁上产生一个力矩,促使衔铁、弹簧管、喷嘴组件偏转一个正比于力矩的小角度。经过喷嘴的高速射流的偏转,使得接受器一腔压力升高,另一腔压力降低,连接这两腔的阀芯两端形成压差,阀芯运动直到反馈组件产生的力矩与马达力矩相平衡,使喷嘴又回到两接受器的中间位置为止。这样阀芯的位移与控制电流的大小成正比,阀的输出流量就比例于控制电流。 图2 射流管式力反馈电液流量伺服阀 ★两种阀的主要特点: 射流管式与喷嘴挡板式最大差别在于喷嘴挡板式以改变流体回路上所通过的阻抗来进行力的控制。相反,射流管式是靠射流喷嘴喷射工作液,将压力能变成动能,控制两个接受孔获得能量的比例来进行力的控制。这种方式的阀与喷嘴挡板式相比因射流喷嘴大,由污粒等工作液中杂物引起的危害小,抗污染能力强。且射流管式液压放大器的压力效率及容积效率高,一般为70%以上,有时也可达到90%以上的高效率。输出控制力(滑阀驱动力)大,进一步提高了抗污染能力。同样其灵敏度、分辨率及低压工作性能大大优于喷嘴挡板阀。另外,由于射流管式由于在喷嘴的下游进行力控制,当喷嘴被杂物完全堵死时,因两个接受孔均无能量输入,滑阀阀芯的两端面也没有油压的作用,反馈弹簧的弯曲变形力会使阀芯回到零位上,伺服阀可避免过大的流量输出,具有“失效对中”能力,并不会发生所谓的“满舵”现象。但射流管式液压放大器及整个阀的性能不易理论
电液比例阀工作原理-标准化文件发布号:(9556-EUATWK-MWUB-WUNN-INNUL-DDQTY-KII
电液比例阀是阀内比例电磁铁输入电压信号产生相应动作,使工作阀阀芯产生位移,阀口尺寸发生改变并以此完成与输入电压成比例压力、流量输出元件。阀芯位移也可以以机械、液压或电形式进行反馈。电液比例阀具有形式种类多样、容易组成使用电气及计算机控制各种电液系统、控制精度高、安装使用灵活以及抗污染能力强等多方面优点,应用领域日益拓宽。近年研发生产插装式比例阀和比例多路阀充分考虑到工程机械使用特点,具有先导控制、负载传感和压力补偿等功能。它出现对移动式液压机械整体技术水平提升具有重要意义。特别是电控先导操作、无线遥控和有线遥控操作等方面展现了其良好应用前景。 2 工程机械电液比例阀种类和形式 电液比例阀包括比例流量阀、比例压力阀、比例换向阀。工程机械液压操作特点,以结构形式划分电液比例阀主要有两类:一类是螺旋插装式比例阀(screwin cartridge proportional valve),另一类是滑阀式比例阀(spool proportional valve)。 螺旋插装式比例阀是螺纹将电磁比例插装件固定油路集成块上元件,螺旋插装阀具有应用灵活、节省管路和成本低廉等特点,近年来工程机械上应用越来越广泛。常用螺旋插装式比例阀有二通、三通、四通和多通等形式,二通式比例阀主比例节流阀,它常它元件一起构成复合阀,对流量、压力进行控制;三通式比例阀主比例减压阀,也是移动式机械液压系统中应用较多比例阀,它主对液动操作多路阀先导油路进行操作。利用三通式比例减压阀可以代替传统手动减压式先导阀,它比手动先导阀具有更多灵活性和更高控制精度。可以制成如图1所示比例伺服控制手动多路阀,不同输入信号,减压阀使输出活塞具有不同压力或流量进而实现对多路阀阀芯位移进行比例控制。四通或多通螺旋插装式比例阀可以对工作装置实现单独控制。 滑阀式比例阀又称分配阀,是移动式机械液压系统最基本元件之一,是能实现方向与流量调节复合阀。电液滑阀式比例多路阀是比较理想电液转换控制元件,它保留了手动多路阀基本功能,还增加了位置电反馈比例伺服操作和负载传感等先进控制手段。它是工程机械分配阀更新换代产品。 出于制造成本考虑和工程机械控制精度要求不高特点,一般比例多路阀内不配置位移感应传感器,具有电子检测和纠错功能。,阀芯位移量容易受负载变化引起压力波动影响,操作过程中要靠视觉观察来保证作业完成。电控、遥控操作时更应注意外界干涉影响。近来,电子技术发展,人们越来越多采用内装差动变压器(LDVT)等位移传感器构成阀芯位置移动检测,实现阀芯位移闭环控制。这种由电磁比例阀、位置反馈传感器、驱动放大器和其它电子电路组成高度集成比例阀,具有一定校正功能,可以有效克服一般比例阀缺点,使控制精度到较大提高。 3 电液比例多路阀负载传感与压力补偿技术
电液伺服阀与比电液例阀的研究现状与发展趋势 摘要:电液比例阀是电液比例控制技术的核心元件,它按照输入电信号指令,连续成比例地控制液压系统的压力、流量或方向等参数。电液伺服阀是电液伺服控制系统中的关键元件。二者均在电液比例系统以及电液伺服系统中起到重要作用。本文中以电液比例换向阀和电液伺服阀为例详细介绍了其工作原理,并从性能、方展、前景等方面分别对两类阀进行了阐述,使我们对其有了更深刻的认识。 关键词:电液比例阀;电液比例换向阀;电液伺服阀;现状;趋势 1 引言 液压工业己成为全球性的工业,国际液压界一些著名公司如美国的派克汉尼汾公司(PARKER HANNIFIN)、德国的力士乐(REXROTH)和博世公司(BOSCH)等居世界领先地位,我国液压工业距国外还有一定的差距。 现代液控技术始于第一次世界大战后。今天,机电一体化的进程对液控技术提出了更多的需求,而计算机技术和控制理论的发展则为液压技术注入了新的动力。电液比例阀与电液伺服阀作为液压系统中的重要控制元件,分别代表了电液比例技术与电液伺服技术的发展情况。电液伺服阀与电液比例阀的出现使液压系统与现代化的电子技术结合的更加紧。 电液比例阀,是电液比例控制技术的核心和主要功率放大元件,代表了流体控制技术的发展方向[ 1 ] 。它以传统的工业用液压控制阀为基础,采用电- 机械转换装置,将电信号转换为位移信号,按输入电信号指令连续、成比例地控制液压系统的压力、流量或方向等参数。 电液伺服阀不仅能够实现微小电气信号向大功率液压信号(流量与压力)的转换,还可以根据输入电信号的大小,成比例地输出相应的流量和压力。因此,在电液伺服系统中,电液伺服阀将电气部分与液压部分连接起来,实现整个系统的控制策略和执行元件的动作。所以,电液伺服阀的性能,特别是其电液伺服阀的动特性和稳定性,直接影响到整个液压系统乃至机械设备的可靠性和寿命。电液伺服阀的发展史就是一部力图获得速度更快、精度更高、稳定性更好的创新史[ 2 ]。 2 发展历史 2.1电液伺服阀发展历史 最早使用液压伺服技术的机构也许已经湮灭在浩瀚的历史长河中。直到1750 年左右,用于控制给水系统和蒸汽锅炉水位的液位控制阀在英国出现。随着工业革命的发展,控制策略的不断改进, 进而影响到液压技术的发展。在二战前夕,由于空气动力学的应用要求一种能够实现机械信号与气体信号转换装置。在二战末期,伺服阀是采用滑阀阀芯在阀套中移动的结构。阀芯的运动是直流螺线管产生的电磁力与弹簧产生的压力共同作用的结果,因此,此时的伺服阀还仅仅是一种单级开环控制阀。二战结束后,电液伺服阀开发研制进入了迅速发展时期,很多结构设计进一步提高了电液伺服阀的性能。特别是1960年的电液伺服阀设计更多地显示出了现代伺服阀的特点。如:两级间形成了闭环反馈控制;力矩马达更轻移动距离更小;前置级对功率级的压差通常可达到50%以上;前置级无摩擦并且与工作油液相互独立;前置级的机械对称结构减小了温度、压力变化对零位的影响。
第二章 液压放大元件 习题 1. 有一零开口全周通油的四边滑阀,其直径m d 3108-?=,径向间隙 m r c 6105-?=,供油压力Pa p s 51070?=,采用10号航空液压油在40C ?工作,流 量系数62.0=d C ,求阀的零位系数。s pa ??=-2104.1μ3/870m kg =ρ 解:对于全开口的阀,d W π= 由零开口四边滑阀零位系数 2. 已知一正开口量m U 31005.0-?=的四边滑阀,在供油压力Pa p s 51070?=下测得零位泄漏流量min /5L q c =,求阀的三个零位系数。 解:正开口四边滑阀零位系数ρ s d q p w c k 20= s s d co p p wu c k ρ = ρ s d c p wu c q 2= 3. 一零开口全周通油的四边滑阀,其直径m d 3108-?=,供油压力 Pa p s 510210?=,最大开口量m x m 30105.0-?=,求最大空载稳态液动力。 解:全开口的阀d W π= 最大空载液动力: 4. 有一阀控系统,阀为零开口四边滑阀,供油压力Pa p s 510210?=,系统稳定性要求阀的流量增益s m K q /072.220=,试设计计算滑阀的直径d 的最大开口量 m x 0。计算时取流量系数62.0=d C ,油液密度3/870m kg =ρ。 解:零开口四边滑阀的流量增益: 故m d 31085.6-?= 全周开口滑阀不产生流量饱和条件
5. 已知一双喷嘴挡板阀,供油压力Pa p s 510210?=,零位泄漏流量 s m q c /105.736-?=,设计计算N D 、0f x 、0D ,并求出零位系数。计算时取8.00d =C , 64.0df =C ,3/870m kg =ρ。 解:由零位泄漏量 ρπs f N df c p X D C q 02???= 即16 0N f D X = 得: mm p C q D s df c N 438.0216=??= ρ π 则: 若: 8.00 =d df C C , 16 10= N f D X 则mm D D N 193.044.00== 第三章 液压动力元件 习题 1. 有一阀控液压马达系统,已知:液压马达排量为rad m D m /10636-?=,马达容积效率为95%,额定流量为s m q n /1066.634-?=,额定压力Pa p n 510140?=,高低压腔总容积34103m V t -?=。拖动纯惯性负载,负载转动惯量为2 2.0m kg J t ?=,阀的流量增益s m K q /42=,流量-压力系数Pa s m K c ??=-/105.1316。液体等效体积弹性模量Pa 8e 107?=β。试求出以阀芯位移V x 为输入,液压马达转角m θ为输出的传递函数。 解:解:由阀控液压马达的三个基本方程 由阀控液压马达的三个基本方程 可得 ()q m m 32 t c tm t t 22 e m m s s s 4V K D J K C X V J D D θβ= +++
工程机械电液比例阀特点、原理及应用 工程机械电液比例阀的特点及其应用—感谢山东科技大冯开林教授 1 引言 电液比例阀是阀内比例电磁铁根据输入的电压信号产生相应动作,使工作阀阀芯产生位移,阀口尺寸发生改变并以此完成与输入电压成比例的压力、流量输出的元件。阀芯位移也可以以机械、液压或电的形式进行反馈。由于电液比例阀具有形式种类多样、容易组成使用电气及计算机控制的各种电液系统、控制精度高、安装使用灵活以及抗污染能力强等多方面优点,因此应用领域日益拓宽。近年研发生产的插装式比例阀和比例多路阀充分考虑到工程机械的使用特点,具有先导控制、负载传感和压力补偿等功能。它的出现对移动式液压机械整体技术水平的提升具有重要意义。特别是在电控先导操作、无线遥控和有线遥控操作等 方面展现了其良好的应用前景。 2 工程机械电液比例阀的种类和形式 电液比例阀包括比例流量阀、比例压力阀、比例换向阀。根据工程机械液压操作的特点,以结构形式划分电液比例阀主要有两类:一类是螺旋插装式比例阀(screwin cartridge proportional valve),另一类是滑阀式比例阀(spool proportional valve)。 螺旋插装式比例阀是通过螺纹将电磁比例插装件固定在油路集成块上的元件,螺旋插装阀具有应用灵活、节省管路和成本低廉等特点,近年来在工程机械上的应用越来越广泛。常用的螺旋插装式比例阀有二通、三通、四通和多通等形式,二通式比例阀主要是比例节流阀,它常与其它元件一起构成复合阀,对流量、压力进行控制;三通式比例阀主要是比例减压阀,也是移动式机械液压系统中应用较多的比例阀,它主要是对液动操作多路阀的先导油路进行操作。利用三通式比例减压阀可以代替传统的手动减压式先导阀,它比手动的先导阀具有更多的灵活性和更高的控制精度。可以制成如图1所示的比例伺服控制手动多路阀,根据不同的输入信号,减压阀使输出活塞具有不同的压力或流量进而实现对多路阀阀芯的位移进行比例控制。四通或多通的螺旋插装式比例阀可以对工作装置实现单独的控制。 滑阀式比例阀又称分配阀,是移动式机械液压系统最基本的元件之一,是能实现方向与流量调节的复合阀。电液滑阀式比例多路阀是比较理想的电液转换控制元件,它不仅保留了手动多路阀的基本功能,还增加了位置电反馈的比例伺服操作和负载传感等先进的控制手段。所以它是工程机械分配阀的更新换代产品。 出于制造成本的考虑和工程机械控制精度要求不高的特点,一般比例多路阀内不配置位移感应传感器,也不具有电子检测和纠错功能。所以,阀芯位移量容易受负载变化引起的压力波动的影响,操作过程中要靠视觉观察来保证作业的完成。在电控、遥控操作时更应注
电液伺服阀论述 1.概述 电液伺服阀是电液伺服系统中的核心元件。它既是电液转换元件,又是功率放大元件。在系统中将输入的小功率电信号转换为大功率的液压能(压力与能量)输出,其性能对系统特性影响很大。电液伺服阀在电厂中被广泛使用,伺服阀是电液伺服控制系统中的重要控制元件,在系统中起着电液转换和功率放大作用。电液伺服阀的性能和可靠性将直接影响系统的性能和安全,是电液伺服控制系统中引人瞩目的关键元件。 20 世纪70 年代以来,国内开始了对电液伺服系统的研究和应用。近年来,随着国内机械工业的高速发展,对于高精度金属成型装备的需求大大增加,大规格电液伺服系统在锻压机械、轧钢机械、折弯机中的应用越来越广泛。而电液伺服阀的发展可以追溯到二战末期,1940 年前后,在飞机上最早出现了电液伺服控制系统。电液伺服阀将输入的小功率电信号转换为大功率液压输出形式( 压力和流量) ,具有控制精度高和响应速度快的特点。电液伺服阀结构精密,对油液介质要求高,价格昂贵。典型结构有喷嘴挡板式和射流管式,喷嘴挡板式动态响应快,灵敏度高,但是零位泄漏量大,喷嘴易堵塞。与喷嘴挡板式电液伺服阀相比,射流管式电液伺服阀抗污染能力强,但是响应速度略慢。 为使电液伺服系统能够可靠并廉价地应用到实际工业生产中,20 世纪60 年代末,出现了电液比例阀。电液比例阀是阀内比例电磁铁根据输入的电压信号产生相应动作,使阀芯产生位移,阀口尺寸发生改变并以此完成与输入电压成比例的压力、流量输出的元件。后来又经过了一系列的发展,20 世纪末,伺服技术与比例技术相结合,伺服比例阀应运而生。与电液伺服阀相比,电液比例阀抗污染能力强,成本低,但是其直线性和响应速度均不及电液伺服阀。 电液伺服阀和电液比例阀有其独有的特点和优势,但也因其自身结构特点的原因,有一些先天的劣势。特别是当要求输出的液压功率较大,而电-机械转换元件输出功率较小,无法直接驱动功率级主阀时,需要增加液压先导级,无疑使阀的结构更加复杂,稳定性降低。而电磁直驱式大规格电液伺服阀以其新的设计
当A相通电转为A和B同时通电时,转子的磁极将同时受到A相绕组产生的磁场和B相绕组产生的磁场的共同吸引,转子的磁极则停在A和B两相磁极之间,此时步距角为15°,减小一半。 三相反应式步进电机的一个通电循环周期如下:A→AB→B→BC→C→CA,每个循环周期分为六拍。 每拍转子转过15°,一个通电循环周期转子转过90°。 与单三拍相比,六拍驱动方式的步进角更小,更适用于需要精确定位的控制系统中。 2.为什么说液压阻尼比是一个可变量?低阻尼对液压系统的动态 特性有什么影响?如何提高系统的阻尼?这些方法各有什么优缺 点? 因为阀的流量-压力系数是影响液压阻尼比的重要参数,而阀开口是可变的,流量-压力会随之改变,所以液压阻尼比是一个可变量。 低阻尼会使系统的稳定性下降。 提高液压阻尼比的方法:设置液压缸管路泄露通道;采用正开口阀;增设阻尼器;采用压力反馈、动压反馈或加速度反馈等。 采用压力反馈可以提高系统的阻尼比和固有频率,但会降低系统的开环增益,系统刚度降低, 干扰误差增加。 动压反馈校正能提高系统的阻尼比同时不改变系统的刚度。 加速度反馈校正可以提高系统的阻尼比,同时降低谐振的振幅。 低阻尼是影响系统的稳定性和限制系统频宽的主要因素之一。提高系统的阻尼的方法有以下几种: 1)设置旁路泄露通道。在液压缸两个工作腔之间设置旁路通道增加泄露系C。缺点是增大了功率损失,降低了系统的总压力增益和系统的刚度,增加数 tp 外负载力引起的误差。另外,系统性能受温度变化的影响较大。 K值大,可以增加阻尼,但也要使系统刚度2)采用正开口阀,正开口阀的 c0
降低,而且零位泄漏量引起的功率损失比第一种办法还要大。另外正开口阀还要带来非线性流量增益、稳态液动力变化等问题。 3)增加负载的粘性阻尼。需要另外设置阻尼器,增加了结构的复杂性。 4)在液压缸两腔之间连接一个机-液瞬态压力反馈网络,或采用压力反馈或动压反馈伺服阀。 3、影响液压动力执行元件特性的因素有哪些?有什么影响?如 何实现液压动力执行元件与负载的匹配? 答:影响液压动力执行元件特性的因素有液压源压力、负载流量大小、液压缸尺寸。 影响:1)提高液压源压力,特性曲线形状不变,顶点右移。 2)提高流量大小,特性曲线顶点不变,形状变宽。 3)提高液压缸活塞面积,顶点右移,形状变窄,功率不变。 液压动力执行元件特性曲线包含负载特性曲线,且两曲线在最大功率处有公共切点,即为 液压动力执行元件与负载的最佳匹配。 4、液压固有频率有什么意义?提高液压固有频率对系统有什么 好处?如何提高系统固有频率? 答:液压固有频率是负载惯性与液压缸封闭油腔中液体的压缩性相互作用的结果。 它常常是系统的最低频率,它的大小决定着伺服系统的响应速度。 提高液压固有频率可以提高系统的响应速度和动态品质。 提高方法:1)尽可能使阀靠近液压缸,减少管道体积,使系统油液体积减小到最低。2)选择高 品质液压油,弹性模量尽可能高。3)增加液压系统管道和腔室结构的刚度。液压固有频率是负载质量与液压缸工作腔中的油压缩性所形成的液压弹簧相互作用的结果。液压固有频率标示液压动力元件的响应速度。 提高液压固有频率的办法:增大液压缸活塞杆面积,Ap。减小总压缩体积Vt。减小折算到活塞上的总质量Mt。提高油液的有效体积弹性模量βe,液压阻尼比合适。 5.步进电机是将电脉冲信号转变为角位移或线位移的开环控制元件。在非超载的情况下,电机的转速、停止的位置只取决于脉冲信号的频率和脉冲数,而不受负载变化的影响,即给电机加一个脉冲信号,电机则转过一个步距角。这一线性关系的存在,加上步进电机只有周期性的误差而无累积误差等特点。使得在速度、位置等控制领域用步进电机来控制变的非常的简单。 6.什么叫动力元件,有哪几种动力元件? 液压动力元件是由液压放大元件(液压控制单元)和液压执行元件组成。液压放大元件可以使液压控制阀,也可以是伺服变量泵。液压执行元件是液压缸或液压马达。由他们组成四种基本型式的液压动力元件:阀控液压缸,阀控液压马达,泵控液压缸,泵控液压马达。前两种动力元件可以构成阀控(节流控制)系统,后两种动力元件可以构成泵控(容积控制)系统。
` 第二章 思考题 1、为什么把液压控制阀称为液压放大元件 答:因为液压控制阀将输入的机械信号(位移)转换为液压信号(压力、流量)输出,并进行功率放大,移动阀芯所需要的信号功率很小,而系统的输出功率却可以很大。 2、什么是理想滑阀什么是实际滑阀 答:理想滑阀是指径向间隙为零,工作边锐利的滑阀。 实际滑阀是指有径向间隙,同时阀口工作边也不可避免地存在小圆角的滑阀。 4、什么叫阀的工作点零位工作点的条件是什么 | 答:阀的工作点是指压力-流量曲线上的点,即稳态情况下,负载压力为p L ,阀位移x V 时, 阀的负载流量为q L 的位置。 零位工作点的条件是q=p=x=0 L L V 。 5、在计算系统稳定性、响应特性和稳态误差时,应如何选定阀的系数为什么 答:流量增益 q q = x L V K ? ? ,为放大倍数,直接影响系统的开环增益。 流量-压力系数 c q =- p L L K ? ? ,直接影响阀控执行元件的阻尼比和速度刚度。 压力增益 p p = x L V K ? ? ,表示阀控执行元件组合启动大惯量或大摩擦力负载的能力 当各系数增大时对系统的影响如下表所示。 , 7、径向间隙对零开口滑阀的静态特性有什么影响为什么要研究实际零开口滑阀的泄漏特性 答:理想零开口滑阀 c0=0 K, p0= K∞,而实际零开口滑阀由于径向间隙的影响,存在泄漏
流量2c c0r = 32W K πμ ,p0c K ,两者相差很大。 理想零开口滑阀实际零开口滑阀因有径向间隙和工作边的小圆角,存在泄漏,泄漏特性决定了阀的性能,用泄漏流量曲线可以度量阀芯在中位时的液压功率损失大小,用中位泄漏流量曲线来判断阀的加工配合质量。 9、什么是稳态液动力什么是瞬态液动力 答:稳态液动力是指,在阀口开度一定的稳定流动情况下,液流对阀芯的反作用力。 瞬态液动力是指,在阀芯运动过程中,阀开口量变化使通过阀口的流量发生变化,引起阀腔内液流速度随时间变化,其动量变化对阀芯产生的反作用力。 > 习题 1、有一零开口全周通油的四边滑阀,其直径-3 d=810m ?,径向间隙-6c r =510m ?,供油压力5s p =7010a P ?,采用10号航空液压油在40C 。 工作,流量系数d C =0.62,求阀的零位 系数。 解:零开口四边滑阀的零位系数为: 零位流量增益 q0d K C =零位流量-压力系数 2c c0r 32W K πμ = 零位压力增益 p0c K = 将数据代入得 2q0 1.4m s K = ! 123c0 4.410m s a K P -=?? 11p0 3.1710a m K P =? 2、已知一正开口量-3 =0.0510m U ?的四边滑阀,在供油压力5s p =7010a P ?下测得零位泄 露流量c q =5min L ,求阀的三个零位系数。 解:正开口四边滑阀的零位系数为:
3.2.1直动式比例溢流阀 直动式比例溢流阀的工作原理及结构见图3-2,。这是一种带位置电反馈的双弹簧结构的直动式溢流阀。它于手调式直动溢流阀的功能完全一样。其主要区别是用比例电磁铁取代了手动弹簧力调节组件。 如图3-2a所示,它主要包括阀体6,带位置传感器1、比例电磁铁2、阀座7、阀芯5及调压弹簧4等主要零件。当电信号输入时,电磁铁产生相应的电磁力,通过弹簧座3加在调压弹簧4和阀芯上,并对弹簧预压缩。此预压缩量决定了溢流压力。而压缩量正比输入电信号,所以溢流压力也正比于输入电信号,实现对压力的比例控制。 弹簧座德实际位置由差动变压器式位移传感器1检测,实际值被反馈到输入端与输入值进行比较,当出现误差就由电控制器产生信号加以纠正。由图3-2b所示的结构框图可见,利用这种原理,可排除电磁铁摩擦的影响,从而较少迟滞和提高重复精度等因素会影响调压精度。显然这是一种属于间接检测的反馈方式。 a b 图3-2 带位置电反馈的直动式溢流阀 a)工作原理及结构b)结构框图 1—位移传感器2—比例电磁铁3—弹簧座4—调压弹簧 5—阀芯6—阀体7—阀座8—调零螺钉 普通溢流阀可以靠不同刚度的调压弹簧来改变压力等级,而比例溢流阀却不能。由于比例电磁铁的推力是一定的,所以不同的等级要靠改变阀座的孔径来获得。这就使得不同压力等级时,其允许的最大溢流量也不相同。根据压力等级不同,最大过流量为2~10L/min。阀的最大设定压力就是阀的额定工作压力,而设定最低压力与溢流量有关。这种直动式的溢流阀除在小流量场合下单独作用,作为调节元件外,更多的是作为先导式溢流阀或减压阀的先
导阀用。另外,位于阀底部德调节螺钉8,可在一定范围内,调节溢流阀的工作零位。 3.2.2先导式比例溢流阀 1.结构及工作原理 图3-3所示为一种先导式比例溢流阀的结构图。它的上部位先导级6,是一个直动式比例溢流阀。下部为主阀级11,中部带有一个手调限压阀10,用于防止系统过载。 当比例电磁铁9通有输入信号电流时,它施加一个直接作用在先导阀芯8上。先导压力油从内部先导油口(取下螺堵13)或从外部先导油口X处进入,经流道口和节流3后分成两股,一股经节流孔5作用在先导阀芯7上,另一股经节流孔4作用在阀芯撒谎女上部。只要A油口压的压力不足以使导阀打开,主阀芯的上下腔的压力就保持相等,从而主阀芯保持关闭状态。这是因为主阀芯上下有效面积相等,从而主阀芯保持关闭状态。这是因为主阀芯上下有效面积相等,而上面有一个软弹簧向下施加一个力,使阀芯关闭。 当主阀芯是锥阀,它既小又轻,要求的行程也很小,所以这种阀的响应很快。阀套上有三个径向分布的油孔,当阀开启时使油流分散流走,大大减少噪声。节流孔4起动态压力发 亏作用,提高阀芯的稳定性。 图3-3 先导式比例溢流阀 1—先导油流道2—主阀弹簧 3.、4、5—节流口6—先导阀 7—外泄口8—先导阀芯9—比例电磁铁10—安全阀 11—主阀级12—主阀芯13—内部先导油口螺堵 A—进油口B—出油口X—外部先导油口Y—外部先导卸油口 与传统的先导式溢流阀不同,比例溢流阀的压力等级的获得是靠改变先导阀的阀座孔径来实现的。这点与比例直动式溢流阀完全相同。较大的阀座孔径对应着较低的压力等级。小阀座孔径可获得较高的额定值。阀座的孔径通常由制造厂根据阀座的压力等级在制造时已经确定。
电液伺服阀的发展与研究现状 陈潜201302070902 健行理工1301班 电液伺服阀是电液伺服控制中的关键元件,它是一种接受模拟电信号后,相应输出调制的流量和压力的液压控制阀。电液伺服阀具有动态响应快、控制精度高、使用寿命长等优点,已广泛应用于航空、航天、舰船、冶金、化工等领域的电液伺服控制系统中。电液伺服阀是电液联合控制的多级伺服元件,它能将微弱的电气输入信号放大成大功率的液压能量输出。它具有控制精度高和放大倍数大等优点,在液压控制系统中得到广泛的应用。 一发展过程 1750年左右,用于控制给水系统和蒸汽锅炉水位的液位控制阀在英国出现。随着工业革命的发展,控制策略的不断改进,进而影响到液压技术的发展。在二战前夕,由于空气动力学的应用,要求发明一种能够实现机械信号与气体信号转换装置。在二战末期,伺服阀是采用滑阀阀芯在阀套中移动的结构。阀芯的运动是直流螺线管产生的电磁力与弹簧产生的压力共同作用的结果,因此,此时的伺服阀还仅仅是一种单级开环控制阀。二战结束后,电液伺服阀开发研制进入了迅速发展时期,很多结构设计进一步提高了电液伺服阀的性能。特别是1960年的电液伺服阀设计更多地显示出了现代伺服阀的特点。 1946年,英国人获得了两级阀的专利。 1950年,W.C.Moog第一个发明了单喷嘴两级伺服阀。 1953年至1955年间,T.H.Carson发明了机械反馈式两级伺服阀,W.C.Moog 发明了双喷嘴两级伺服阀,Wolpin发明了干式力矩马达,消除了原来浸在油液内的力矩马达由油液污染带来的可靠性问题。 1957年Atchley利用射流管原理研制了两级射流管伺服阀。 1959年Atchley研制了三级电反馈伺服阀。 1959年2月,国外某液压与气动杂志对当时的伺服阀情况作了12页的报道,显示了当时伺服阀蓬勃发展的状况。那时生产各种类型的伺服阀的制造商有20多家。大多数生产具有反馈及力矩马达的两级伺服阀。
电液伺服阀的发展历史及研究现状分析(一) 论文关键词:电液伺服阀发展历史发展趋势 论文摘要:电液伺服阀是电液伺服控制系统中的关键元件。文章详细论述了电液伺服阀的发展历史及研究现状。最后对电液伺服阀的趋势进行了展望。 一、概述 电液伺服阀不仅能够实现微小电气信号向大功率液压信号(流量与压力)的转换,还可以根据输人电信号的大小,成比例地输出相应的流量和压力。因此,在电液伺服系统中,电液伺服阀将电气部分与液压部分连接起来,实现整个系统的控制策略和执行元件的动作。所以,电液伺服阀的性能,特别是其电液伺服阀的动特性和稳定性,直接影响到整个液压系统乃至机械设备的可靠性和寿命。电液伺服阀的发展史就是一部力图获得速度更快、精度更高、稳定性更好的创新史。 二、发展历史 1.早期。最早使用液压伺服技术的机构也许已经湮灭在浩瀚的历史长河中。但是最早对这门学科作出了突出贡献的人可以肯定的说是Ktesbios。公元前247年到285年,生活在亚历山大城的古埃及人Ktesbios发明了很多液压伺服机构。其中最为杰出的一种是水钟,他设计的水钟可以显示长达一个月的准确时间。其原理是通过节流孔将浮标显示的液面高度与容器形成一个闭环反馈系统。从某种意义上说,这种浮标已经具备现代液压伺服阀的雏形。 但是,在随后漫长的历史阶段,液压控制技术一直停滞不前。直到1750年左右,用于控制给水系统和蒸汽锅炉水位的液位控制阀在英国出现。随着工业革命的发展,控制策略的不断改进,进而影响到液压技术的发展。1795年,约瑟夫·布拉马应用帕斯卡原理制作了水压机,1796年,莫兹利为了使水压机更好的工作,设计了水压机泵的密封装置—皮碗密封。而它是我们现在密封技术的初形。到了18世纪末期,蓄能器在英国出现。19世纪早期,开始采用油液代替水成为液压系统的介质,同时方向控制阀采用电信号进行驱动。 2二战期间。在二战前夕,由于空气动力学的应用要求一种能够实现机械信号与气体信号转换装置。阿斯卡尼亚控制器公司及Askania-Werke根据射流原理发明了射流管阀并申请了专利。根据同样的原理,福克斯波罗申请了双喷嘴挡板阀的专利。德国西门子公司发明了永磁式力矩马达,它可以接受通过弹簧输人的机械信号和移动线圈产生的电信号,并开创性地使用在航空领域。 在二战末期,伺服阀是采用滑阀阀芯在阀套中移动的结构。阀芯的运动是直流螺线管产生的电磁力与弹簧产生的压力共同作用的结果,因此,此时的伺服阀还仅仅是一种单级开环控制阀。 3二战后。二次世界大战之后,由于军事的刺激,自动控制理论特别是武器和飞行器控制系统的研究得到进一步发展。这从另一个方面大大刺激了液压伺服阀的研制与创新。 1946年,英国的廷斯利发明了两级液压阀;雷神和贝尔飞机公司获得了带反馈两级伺服阀的专利;麻省理工学院采用线性度更好、更节能的力矩马达代替螺线管作为滑阀的驱动装置。1950年,穆格发明了采用喷嘴节流孔作前置级的两级伺服阀。在此基础上,从1953年至1955年,卡森发明了机械反馈式两级伺服阀;穆格改进了双喷嘴节流孔结构;沃尔平则将湿式电磁铁改为干式的,消除了原来浸在油液内的力矩马达由油液污染带来的可靠性问题。1957年,阿奇利发明了射流管阀作为前置级的两级电液伺服阀。并于1959年成功研制出了兰级电信号反馈伺服阀。 此时的电液伺服阀开发研制进人了迅速发展时期,很多结构设计进一步提高了电液伺服阀的性能。特别是1960年的电液伺服阀设计更多地显示出了现代伺服阀的特点。如:两级间形成了闭环反馈控制;力矩马达更轻移动距离更小;前置级对功率级的压差通常可达到50%以上;前置级无摩擦并且与工作油液相互独立;前置级的机械对称结构减小了温度、压力变化对零
液压控制系统王春行版课后题答案
第二章 思考题 1、为什么把液压控制阀称为液压放大元件? 答:因为液压控制阀将输入的机械信号(位移)转换为液压信号(压力、流量)输出,并进行功率放大,移动阀芯所需要的信号功率很小,而系统的输出功率却能够很大。 2、什么是理想滑阀?什么是实际滑阀? 答:理想滑阀是指径向间隙为零,工作边锐利的滑阀。 实际滑阀是指有径向间隙,同时阀口工作边也不可避免地存在小圆角的滑阀。 4、什么叫阀的工作点?零位工作点的条件是什么? 答:阀的工作点是指压力-流量曲线上的点,即稳态情况下,负载 压力为p L ,阀位移x V 时,阀的负载流量为q L 的位置。 零位工作点的条件是q=p=x=0 L L V 。 5、在计算系统稳定性、响应特性和稳态误差时,应如何选定阀的系数?为什么? 答:流量增益 q q = x L V K ? ? ,为放大倍数,直接影响系统的开环增益。 流量-压力系数 c q =- p L L K ? ? ,直接影响阀控执行元件的阻尼比和 速度刚度。 压力增益 p p = x L V K ? ? ,表示阀控执行元件组合启动大惯量或大摩 擦力负载的能力
当各系数增大时对系统的影响如下表所示。 7、径向间隙对零开口滑阀的静态特性有什么影响?为什么要研究实际零开口滑阀的泄漏特性? 答:理想零开口滑阀c0=0K ,p0=K ∞,而实际零开口滑阀由于径向间隙的影响,存在泄漏流量2c c0r =32W K πμ ,p0c K ,两者相差 很大。 理想零开口滑阀实际零开口滑阀因有径向间隙和工作边的小圆角,存在泄漏,泄漏特性决定了阀的性能,用泄漏流量曲线能够度量阀芯在中位时的液压功率损失大小,用中位泄漏流量曲线来判断阀的加工配合质量。 9、什么是稳态液动力?什么是瞬态液动力? 答:稳态液动力是指,在阀口开度一定的稳定流动情况下,液流对阀芯的反作用力。 瞬态液动力是指,在阀芯运动过程中,阀开口量变化使经过阀口的流量发生变化,引起阀腔内液流速度随时间变化,其动量变化对阀芯产生的反作用力。