%MATLAB程序:已知三个位置设计平面四杆机构求解程序(位移矩阵法) clear;clc; %凡是变量名前带v的为数值变量,不带的是符号变量 vxp1=0; vyp1=0; vsita1=0*pi/180; vxp2=-2; vyp2=6; vsita2=40*pi/180; vxp3=-10; vyp3=8; vsita3=90*pi/180; %精确位置P1,P2,P3及各角度 vsita12=vsita2-vsita1; vsita13=vsita3-vsita1; vxa=-10; vya=-2; vxd=-5; vyd=-2; %选定A,D点 %所有数值均在此确定,更改此处即可解出不同数值的四杆机构位移矩阵方程 syms xp1 yp1 xp2 yp2 xp3 yp3 sita12 sita13; syms xa ya xb1 yb1 xb2 yb2 xb3 yb3; f1='(xb2-xa)^2+(yb2-ya)^2=(xb1-xa)^2+(yb1-ya)^2'; f2='(xb3-xa)^2+(yb3-ya)^2=(xb1-xa)^2+(yb1-ya)^2'; %前两个机构方程 f3='xb2=cos(sita12)*xb1-sin(sita12)*yb1+xp2-xp1*cos(sita12)+yp1*sin(sita12)'; f4='yb2=sin(sita12)*xb1+cos(sita12)*yb1+yp2-xp1*sin(sita12)-yp1*cos(sita12)'; %由第一个位移矩阵方程得出 f5='xb3=cos(sita13)*xb1-sin(sita13)*yb1+xp3-xp1*cos(sita13)+yp1*sin(sita13)'; f6='yb3=sin(sita13)*xb1+cos(sita13)*yb1+yp3-xp1*sin(sita13)-yp1*cos(sita13)'; %由第二个位移矩阵方程得出 f1=subs(f1,{xa,ya},{vxa,vya}); f2=subs(f2,{xa,ya},{vxa,vya}); f3=subs(f3,{xp1,xp2,yp1,sita12},{vxp1,vxp2,vyp1,vsita12}); f4=subs(f4,{xp1,yp1,yp2,sita12},{vxp1,vyp1,vyp2,vsita12}); f5=subs(f5,{xp1,xp3,yp1,sita13},{vxp1,vxp3,vyp1,vsita13}); f6=subs(f6,{xp1,yp1,yp3,sita13},{vxp1,vyp1,vyp3,vsita13}); %代入具体数值 [xb1,xb2,xb3,yb1,yb2,yb3]=solve(f1,f2,f3,f4,f5,f6); %解方程 vxb1=vpa(xb1); vyb1=vpa(yb1); vxb2=vpa(xb2); vyb2=vpa(yb2); vxb3=vpa(xb3); vyb3=vpa(yb3); (vxb1-vxa)^2+(vyb1-vya)^2; (vxb2-vxa)^2+(vyb2-vya)^2; (vxb3-vxa)^2+(vyb3-vya)^2; %去掉这三行分号可验证B点三个位置是否距离A点相等 syms xd yd xc1 yc1 xc2 yc2 xc3 yc3;
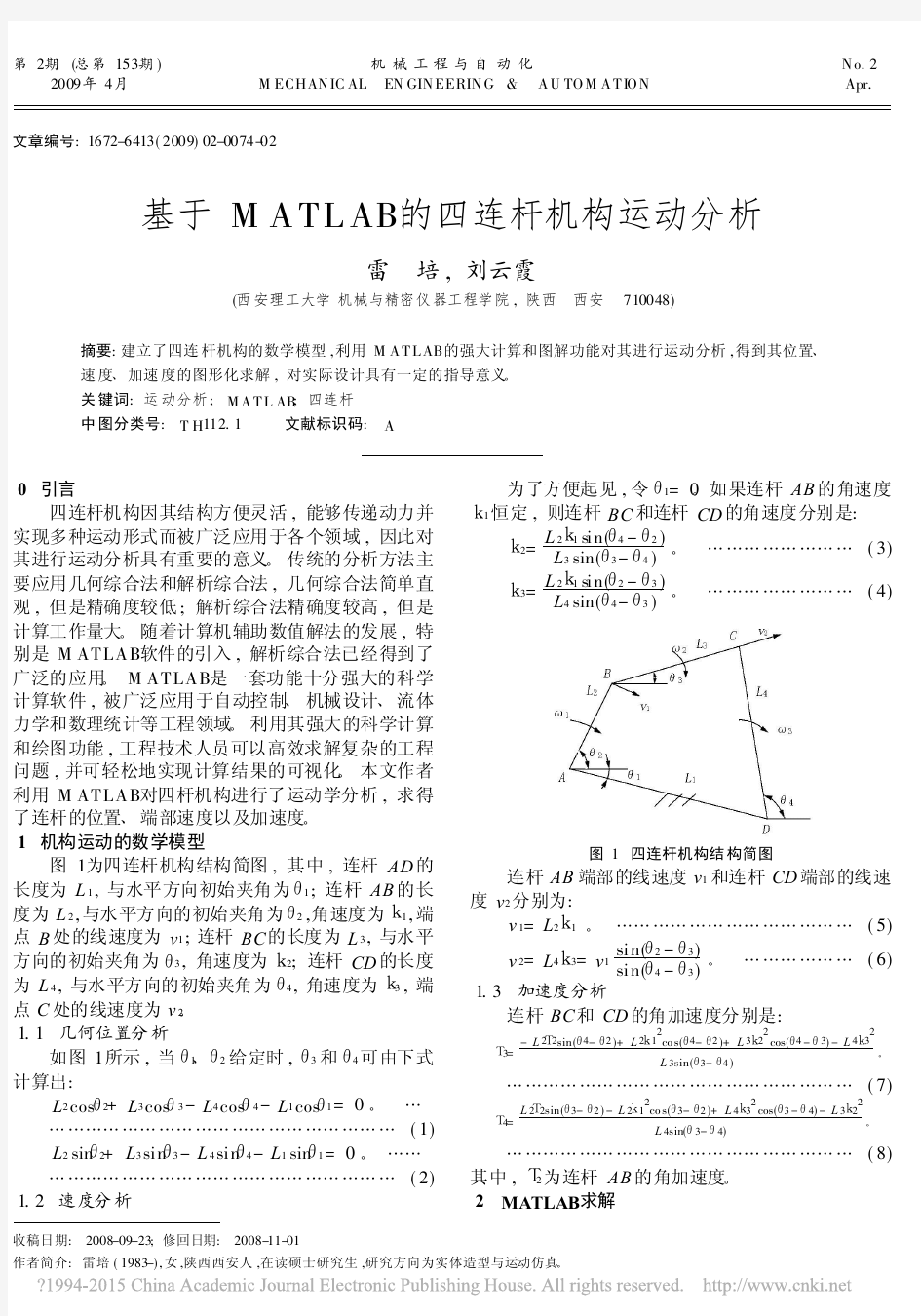
平面四杆机构的运动仿真模型分析 1前言 平面四杆机构是是平面连杆机构的基础,它虽然结构简单,但其承载能力大,而且同样能够实现多种运动轨迹曲线和运动规律,因而在工程实践中得到广泛应用。 平面四杆机构的运动分析, 就是对机构上某点的位移、轨迹、速度、加速度进行分析, 根据原动件的运动规律, 求解出从动件的运动规律。平面四杆机构的运动设计方法有很多,传统的有图解法、解析法和实验法。随着计算机技术的飞速发展,机构设计及运动分析已逐渐脱离传统方法,取而代之的是计算机仿真技术。本文在UG NX5环境下对平面四杆机构进行草图建模,通过草图中的尺寸约束、几何约束及动画尺寸等功能确定各连杆的尺寸,之后建立相应的连杆、运动副及运动驱动,对建立的运动模型进行运动学分析,给出构件上某点的运动轨迹及其速度和加速度变化规律曲线,文章最后简要分析几个应用于工程的平面四杆机构实例。 2平面四杆机构的建模 2.1问题的提出 平面四杆机构因其承载能力大,可以满足或近似满足很多的运动规律,所以其应用非常广泛,本文以基于曲柄摇杆机构的物料传送机构为例,讨论其建模及运动分析。 如图1所示,ABCD为曲柄摇杆机构,曲柄AB为主动件,机构在运动中要求连杆BC的延伸线上E点保持近似直线运动,其中直线轨迹为工作行程,圆弧轨迹为回程或空程,从而实现物料传送的功能。
2.2平面四杆机构的建模 由于物料传送机构为曲柄摇杆机构,所以它符合曲柄存在条件。根据机械原理课程中的应用实例[1],选取AB=100,BC=CD=CE=250,AD=200,单位均为毫米。 在UG NX5的Sketch环境里,创建如图2所示的草图,并作相应的尺寸约束和几何约束,其中EE'为通过E点的水平轨迹参考线,用以检验E点的工作行程运动轨迹。现通过草图里的尺寸动画功能,令AB与AD的夹角从0°到360°变化,可看到E点的变化轨迹为直线和圆弧,如图3所示为尺寸动画的四个截图,其中图3(a)中的E点为水平轨迹的起点,图3(b)中的E点为水平轨迹的中点,图3(c)中的E点为水平轨迹的终点,而图3(d)中的E点为圆弧轨迹(图中未画出)即回程的中点。 如E点轨迹不符合设计要求,则可适当调整各杆件的尺寸,再通过尺寸动画功能检验。
大作业(一) 平面连杆机构的运动分析 (题号:4-B) 班级:机制096 学号:2009012369 姓名:刘希富 同组其他人员:________________________ 完成日期:________________________
平面连杆机构的运动分析题目 试用计算机完成下列平面连杆机构的运动分析。 1.图a 所示的为一平面六杆机构。假设已知各构件的尺寸如表1所示,原动件1以等角速度ω1=1rad/s 沿着逆时针方向回转,试求各从动件的角位移、角速度和角加速度以及E 点的位移、速度和加速度的变化情况。 a ) 表1 平面六杆机构的尺寸参数(单位:mm ) mm l 0.652=',mm x G 5.153=,mm y G 7.41= 二、平面连杆机构的运动分析方程 1)位置分析 建立封闭矢量多边形 l 1+l 2=l 4+l 3; l 1+l 2 + l 2’=AG +l 5 +l 6; (式1) 将机构的封闭矢量方程式(1)写成在两坐标上的投影式,并改写成方程左边仅含未知量项的形式,即得
(式2)由于牛顿迭代法不便于限制l5,l6的位置。故在计算式采用复数矢量法直接求的。 求,; (1)(2)消去θ2得 经整理后并可简化为 式中: 解之可得 实际运动中0<θ3<180,故‘ +-’适当选择; 求θ5,θ6 : 先有 则 2)角速度分析
E点速度 ;3)角加速度分析 ; E点加速度 采用高斯消去法求角速度,角加速度; 三、程序流程图
源程序;#include
基于matlab的连杆机构设计
————————————————————————————————作者: ————————————————————————————————日期:
目录 1平面连杆机构的运动分析 (1) 1.2 机构的工作原理 (1) 1.3机构的数学模型的建立 (1) 1.3.1建立机构的闭环矢量位置方程...................................................1 1.3.2求解方法.....................................................................2 2基于MATLAB程序设计 (4) 2.1 程序流程图 (4) 2.2 M文件编写 (6) 2.3程序运行结果输出 (7) 3 基于MATLAB图形界面设计 (11) 3.1界面设计……………………………………………………………………………………………11 3.2代码设计……………………………………………………………………………………………12
4 小结 (17) 参考文献 (18) 1平面连杆机构的运动分析 1.1 机构运动分析的任务、目的和方法 曲柄摇杆机构是平面连杆机构中最基本的由转动副组成的四杆机构,它可以用来实现转动和摆动之间运动形式的转换或传递动力。 对四杆机构进行运动分析的意义是:在机构尺寸参数已知的情况下,假定主动件(曲柄)做匀速转动,撇开力的作用,仅从运动几何关系上分析从动件(连杆、摇杆)的角位移、角速度、角加速度等运动参数的变化情况。还可以根据机构闭环矢量方程计算从动件的位移偏差。上述这些内容,无论是设计新的机械,还是为了了解现有机械的运动性能,都是十分必要的,而且它还是研究机械运动性能和动力性能提供必要的依据。 机构运动分析的方法很多,主要有图解法和解析法。当需要简捷直观地了解机构的某个或某几个位置的运动特性时,采用图解法比较方便,而且精度也能满足实际问题的要求。而当需要精确地知道或要了解机构在整个运动循环过程中的运动特性时,采用解析法并借助计算机,不仅可获得很高的计算精度及一系列位置的分析结果,并能绘制机构相应的运动线图,同时还可以把机构分析和机构综合问题联系起来,以便于机构的优化设计。 1.2 机构的工作原理 在平面四杆机构中,其具有曲柄的条件为: a.各杆的长度应满足杆长条件,即: 最短杆长度+最长杆长度≤其余两杆长度之和。 b.组成该周转副的两杆中必有一杆为最短杆,且其最短杆为连架杆或机架(当最短杆为连架杆时,四杆机构为曲柄摇杆机构;当最短杆为机架时,则为双曲柄机构)。 在如下图1所示的曲柄摇杆机构中,构件AB为曲柄,则B点应能通过曲柄与连杆两次共线的位置。
机械原理大作业(一)平面六杆机构的运动分析 班级: 学号: 姓名: 同组者: 完成时间:
一.题目 1.1 说明 如图所示为一片面六杆机构各构件尺寸如表格1所示,又知原动件1以等角速度ω=1rad/s沿逆时针方向回转,试求各从动件的角位移、角加速度以及E点的位移、速度及加速度的变化情况。1.2 数据 组号L1L2L’2L3L4L5L6 x G y G 1-A 26.5 105.6 65.0 67.5 87.5 34.4 25.0 600 153.5 41.7 表格1 条件数据 1.3 要求 三人一组,编程计算出原动件从0~360o时(计算点数N=36)所要求各运动变量的大小,并绘制运动线图及点的轨迹曲线。
二.解题步骤 由封闭图形ABCD可得: 由封闭图形AGFECD可得 于是有: 112233 1122433 sin sin sin1 cos cos sin2 l l l l l l l θθθ θθθ +=-------- +=+----- / 1122225566 / 1122225566 cos cos sin cos cos153.53 sin sin cos sin sin41.74 l l l l l l l l l l θθθθθ θθθθθ +++=+---- +-+=+----- 对以上1到4导可得- 222333111 222333111 / 55566611122222 / 55566611122222 cos cos cos sin sin sin sin sin sin(sin cos) cos cos cos(cos sin) l l l l l l l l l l l l l l l l θωθωθω θωθωθω θωθωθωωθθ θωθωθωωθθ-+= -=- -=--- -=--+
四连杆机构运动学分析 使用ADAMS 建立如图1所示的四连杆机构,二杆长150mm ,三杆长500mm ,四杆长450mm ,二杆的转动速度为πrad/s ,二杆初始角度为90度。用Matlab 建立该系统的运动约束方程,计算结果,并与ADAMS 仿真结果进行对比。 图1 四杆机构 一、位置分析 1、由地面约束得到: {R x 1=0 R y 1=0θ1=0 2、由O 点约束得: { R x 2?l 22cos θ2=0R y 2?l 22 sin θ2=0 二杆 三杆 四杆 O 点 A 点 B 点 C 点
3、由A 点约束得: { R x 2+l 22cos θ2?R x 3+l 32cos θ3=0R y 2+l 22sin θ2?R y 3+l 32 sin θ3=0 4、由B 点约束得: { R x 3+l 32cos θ3?R x 4+l 42cos θ4=0R y 3+l 32sin θ3?R y 4+l 42 sin θ4=0 5、由C 点约束得: { R x 4+l 4cos θ4?l 5cos θ1=0R y 4+l 42 sin θ4?l 5sin θ1=0 6、由二杆驱动约束得: θ2?ω2=0 积分得: θ2?θ02?ω2t =0 由上面九个方程组成此机构的运动约束方程,用Matlab 表示为: fx=@(x)([x(1); x(2); x(3); x(4)-l2/2*cos(x(6)); x(5)-l2/2*sin(x(6)); x(4)+l2/2*cos(x(6))-x(7)+l3/2*cos(x(9)); x(5)+l2/2*sin(x(6))-x(8)+l3/2*sin(x(9)); x(7)+l3/2*cos(x(9))-x(10)+l4/2*cos(x(12)); x(8)+l3/2*sin(x(9))-x(11)+l4/2*sin(x(12)); x(10)+l4/2*cos(x(12))-x(1)-l5; x(11)+l4/2*sin(x(12))-x(2); x(6)-w*i-zhj0;]); x(1) x(2) x(3) x(4) x(5) x(6) x(7) x(8) x(9) x(10) x(11) x(12) 分别表示R x 1、R y 1、θ1、R x 2、R y 2、θ2、R x 3、R y 3、θ3、R x 4、R y 4、θ4。
大作业1 连杆机构运动分析 1、运动分析题目 如图所示机构,已知机构各构件的尺寸为280mm AB =,350mm BC =,320mm CD =,160mm AD =,175mm BE = 220mm EF =,25mm G x =,80mm G y =,构件1的角速度为110rad/s ω=,试求构件2上点F 的轨迹及构件5的角位移、角速度和角加速度,并对计算结果进行分析。 2、建立坐标系 建立以点A 为原点的固定平面直角坐标系
图1 3、对机构进行结构分析 该机构由I级杆组RR(原动件1)、II级杆组RRR(杆2、杆3)和II级杆组RPR(滑块4及杆5)组成。I级杆组RR,如图2所示;II级杆组RRR,如图3所示;II级杆组RPR,如图4所示。 图2 图 3
图 4 4、各基本杆组运动分析的数学模型 (1)同一构件上点的运动分析: 图 5 如图5所示的构件AB,,已知杆AB 的角速度=10/rad s ,AB 杆长 i l =280mm,可求得B 点的位置B x 、B y ,速度xB v 、yB v ,加速度xB a 、yB a 。
=cos =280cos B i x l ??; =sin =280sin B i y l ??; = =-sin =-B xB i B dx v l y dt ω?ω; ==cos =;B yB i B dy v l x dt ω?ω 222B 2==-cos =-B xB i d x a l x dt ω?ω; 2222==-sin =-B yB i B d y a l y dt ω?ω。 (2)RRRII 级杆组的运动分析: 图 6 如图6所示是由三个回转副和两个构件组成的II 级组。已知两杆 的杆长2l 、3l 和两个外运动副B 、D 的位置(B x 、B y 、D x 、D y )、速度(xB yB xD yD v v v v 、、、)和加速度(xB yB xD yD a a a a 、、、)。求内运动副C 的位置(C C x 、y )、速度(xC yC v 、v )、加速度(xC yC a 、a )以及两杆
首先创建函数FoutBarPosition,函数fsolve通过他确定。 function t=fourbarposition(th,th2,L2,L3,L4,L1) t=[L2*cos(th2)+L3*cos(th(1))-L4*cos(th(2))-L1;… L2*sin(th2)+L3*sin(th(1))-L4*sin(th(2))]; 主程序如下: disp ' * * * * * * 平面四杆机构的运动分析* * * * * *' L1=304.8;L2=101.6;L3=254.0;L4=177.8; %给定已知量,各杆长L1,L2,L3,L4 th2=[0:1/6:2]*pi; %曲柄输入角度从0至360度,步长为pi/6 th34=zeros(length(th2),2); %建立一个N行2列的零矩阵,第一列存放options=optimset('display','off'); %θ_3,第二列存放θ_3 for m=1:length(th2) %建立for循环,求解θ_3,θ_4 th34(m,:)=fsolve('fourbarposition',[1 1],…%调用fsove函数求解关于θ_3,θ_4 options,th2(m),L2,L3,L4,L1); %的非线性超越方程,结果保存在th34中 end y=L2*sin(th2)+L3*sin(th34(:,1)'); %连杆3的D端点Y坐标值 x=L2*cos(th2)+L3*cos(th34(:,1)'); %连杆3的D端点X坐标值 xx=[L2*cos(th2)]; %连杆3的C端点X坐标值 yy=[L2*sin(th2)]; %连杆3的C端点Y坐标值 figure(1) plot([x;xx],[y;yy],'k',[0 L1],[0 0],…%绘制连杆3的几个位置点 'k--^',x,y,'ko',xx,yy,'ks') title('连杆3的几个位置点') xlabel('水平方向') ylabel('垂直方向') axis equal %XY坐标均衡 th2=[0:2/72:2]*pi; %重新细分曲柄输入角度θ_2,步长为5度 th34=zeros(length(th2),2); options=optimset('display','off'); for m=1:length(th2)
2 平面机构的运动分析 1.图 示 平 面 六 杆 机 构 的 速 度 多 边 形 中 矢 量 ed → 代 表 , 杆4 角 速 度 ω4的 方 向 为 时 针 方 向。 2.当 两 个 构 件 组 成 移 动 副 时 ,其 瞬 心 位 于 处 。当 两 构 件 组 成 纯 滚 动 的 高 副 时, 其 瞬 心 就 在 。当 求 机 构 的 不 互 相 直 接 联 接 各 构 件 间 的 瞬 心 时, 可 应 用 来 求。 3.3 个 彼 此 作 平 面 平 行 运 动 的 构 件 间 共 有 个 速 度 瞬 心, 这 几 个 瞬 心 必 定 位 于 上。 含 有6 个 构 件 的 平 面 机 构, 其 速 度 瞬 心 共 有 个, 其 中 有 个 是 绝 对 瞬 心, 有 个 是 相 对 瞬 心。 4.相 对 瞬 心 与 绝 对 瞬 心 的 相 同 点 是 ,不 同 点 是 。 5.速 度 比 例 尺 的 定 义 是 , 在 比 例 尺 单 位 相 同 的 条 件 下, 它 的 绝 对 值 愈 大, 绘 制 出 的 速 度 多 边 形 图 形 愈 小。 6.图 示 为 六 杆 机 构 的 机 构 运 动 简 图 及 速 度 多 边 形, 图 中 矢 量 cb → 代 表 , 杆3 角 速 度ω3 的 方 向 为 时 针 方 向。 7.机 构 瞬 心 的 数 目N 与 机 构 的 构 件 数 k 的 关 系 是 。 8.在 机 构 运 动 分 析 图 解 法 中, 影 像 原 理 只 适 用 于 。
9.当 两 构 件 组 成 转 动 副 时, 其 速 度 瞬 心 在 处; 组 成 移 动 副 时, 其 速 度 瞬 心 在 处; 组 成 兼 有 相 对 滚 动 和 滑 动 的 平 面 高 副 时, 其 速 度 瞬 心 在 上。 10..速 度 瞬 心 是 两 刚 体 上 为 零 的 重 合 点。 11.铰 链 四 杆 机 构 共 有 个 速 度 瞬 心,其 中 个 是 绝 对 瞬 心, 个 是 相 对 瞬 心。 12.速 度 影 像 的 相 似 原 理 只 能 应 用 于 的 各 点, 而 不 能 应 用 于 机 构 的 的 各 点。 13.作 相 对 运 动 的3 个 构 件 的3 个 瞬 心 必 。 14.当 两 构 件 组 成 转 动 副 时, 其 瞬 心 就 是 。 15.在 摆 动 导 杆 机 构 中, 当 导 杆 和 滑 块 的 相 对 运 动 为 动, 牵 连 运 动 为 动 时, 两 构 件 的 重 合 点 之 间 将 有 哥 氏 加 速 度。 哥 氏 加 速 度 的 大 小 为 ; 方 向 与 的 方 向 一 致。 16.相 对 运 动 瞬 心 是 相 对 运 动 两 构 件 上 为 零 的 重 合 点。 17.车 轮 在 地 面 上 纯 滚 动 并 以 常 速 v 前 进, 则 轮缘 上 K 点 的 绝 对 加 速 度 a a v l K K K KP ==n /2 。 - - - - - - - - - - - - - - - - - - - - - - - - - - - - - - - - - - - - - - -( ) 18.高 副 两 元 素 之 间 相 对 运 动 有 滚 动 和 滑 动 时, 其 瞬 心 就 在 两 元 素 的 接 触 点。- - - ( ) 19.在 图 示 机 构 中, 已 知ω1 及 机 构 尺 寸, 为 求 解C 2 点 的 加 速 度, 只 要 列 出 一 个 矢 量 方 程 r r r r a a a a C B C B C B 222222=++n t 就 可 以 用 图 解 法 将 a C 2求 出。- - - - - - - - - - - - - - - - - - ( ) 20.在 讨 论 杆2 和 杆3 上 的 瞬 时 重 合 点 的 速 度 和 加 速 度 关 系 时, 可 以 选 择 任 意 点 作 为 瞬 时 重 合 点。- - - - - - - - - - - - - - - - - - - - - - - - - - - - - - - - - - - - - - - - - - - - - - - - - ( )
栏杆机四杆机构运动学分析 1 四杆机构运动学分析 1.1 机构运动分析的任务、目的和方法 曲柄摇杆机构是平面连杆机构中最基本的由转动副组成的四杆机构,它可以用来实现转动和摆动之间运动形式的转换或传递动力。 对四杆机构进行运动分析的意义是:在机构尺寸参数已知的情况下,假定主动件(曲柄)做匀速转动,撇开力的作用,仅从运动几何关系上分析从动件(连杆、摇杆)的角位移、角速度、角加速度等运动参数的变化情况。还可以根据机构闭环矢量方程计算从动件的位移偏差。上述这些内容,无论是设计新的机械,还是为了了解现有机械的运动性能,都是十分必要的,而且它还是研究机械运动性能和动力性能提供必要的依据。 机构运动分析的方法很多,主要有图解法和解析法。当需要简捷直观地了解机构的某个或某几个位置的运动特性时,采用图解法比较方便,而且精度也能满足实际问题的要求。而当需要精确地知道或要了解机构在整个运动循环过程中的运动特性时,采用解析法并借助计算机,不仅可获得很高的计算精度及一系列位置的分析结果,并能绘制机构相应的运动线图,同时还可以把机构分析和机构综合问题联系起来,以便于机构的优化设计。 1.2 机构的工作原理 在平面四杆机构中,其具有曲柄的条件为: a.各杆的长度应满足杆长条件,即: 最短杆长度+最长杆长度≤其余两杆长度之和。 b.组成该周转副的两杆中必有一杆为最短杆,且其最短杆为连架杆或机架(当最短杆为连架杆时,四杆机构为曲柄摇杆机构;当最短杆为机架时,则为双曲柄机构)。 三台设备测绘数据分别如下: 第一组(2代一套)四杆机构L1=125.36mm,L2=73.4mm,L3=103.4mm,L4=103.52mm 最短杆长度+最长杆长度(125.36+73.4) <其余两杆长度之和(103.4+103.52) 最短杆为连架杆,四杆机构为曲柄摇杆机构 图1-1 II-1型栏杆机机构测绘及其运动位置图
构件上点的运动分析 函数文件(m文件) 格式:function [ 输出参数] = 函数名(输入参数) p_crank.m function [p_Nx,p_Ny]=p_crank(Ax,Ay,theta,phi,l1) v_crank.m function [v_Nx,v_Ny]=v_crank(l1,v_Ax,v_Ay,omiga,theta,phi) a_crank.m function [a_Nx,a_Ny]=a_crank(l1,a_Ax,a_Ay,alpha,omiga,theta,phi) 函数中的符号说明
函数文件(m 文件) 格式: function [ 输出参数 ] = 函数名( 输入参数 ) p_RRR.m function [cx,cy,theta2,theta3]=p_RRR(bx,by,dx,dy,l2,l3,m) v_RRR.m function [vcx,vcy,omiga2,omiga3]=v_RRR(vbx,vby,vdx,vdy,cx,cy,bx,by,dx,dy) a_RRR.m function [acx,acy,alpha2,alpha3]=a_RRR(abx,aby,adx,ady,cx,cy,bx,by,dx,dy,omiga2,omiga3) 函数中的符号说明 m =1 m = -1 RRR Ⅱ级杆组运动分析
函数文件(m 文件) 格式: function [ 输出参数 ] = 函数名( 输入参数 ) p_RRP.m function [cx,cy,sr,theta2]=p_RRP(bx,by,px,py,theta3,l2,m) v_RRP.m function [vcx,vcy,vr,omiga2]=v_RRP(bx,by,cx,cy,vbx,vby,vpx,vpy,theta2,theta3,l2,sr,omiga3) a_RRP.m function [acx,acy,ar,alpha2]=a_RRP(bx,by,cx,cy,px,py,abx,aby,apx,apy,theta3,vr,omiga2,omiga3,alpha3) 函数中的符号说明 1 1 ∠BCP < 90?,∠BC 'P > 90?, m =1 RRP Ⅱ级杆组运动分析
一、填空题: 1.速度瞬心是两刚体上瞬时速度相等的重合点。 2.若瞬心的绝对速度为零,则该瞬心称为绝对瞬心; 若瞬心的绝对速度不为零,则该瞬心称为相对瞬心。 3.当两个构件组成移动副时,其瞬心位于垂直于导路方向的无穷远处。当两构件组成高副时,两个高副元素作纯滚动,则其瞬心就在接触点处;若两个高副元素间有相对滑动时,则其瞬心在过接触点两高副元素的公法线上。 4.当求机构的不互相直接联接各构件间的瞬心时,可应用三心定理来求。 5.3个彼此作平面平行运动的构件间共有 3 个速度瞬心,这几个瞬心必定位于一条直线上。 6.机构瞬心的数目K与机构的构件数N的关系是K=N(N-1)/2 。 7.铰链四杆机构共有6个速度瞬心,其中3个是绝对瞬心。 8.速度比例尺μν表示图上每单位长度所代表的速度大小,单位为:(m/s)/mm 。 加速度比例尺μa表示图上每单位长度所代表的加速度大小,单位为(m/s2)/mm。 9.速度影像的相似原理只能应用于构件,而不能应用于整个机构。 10.在摆动导杆机构中,当导杆和滑块的相对运动为平动,牵连运动为转动时(以上两空格填转动或平动),两构件的重合点之间将有哥氏加速度。哥氏加速度的大小为2×相对速度×牵连角速度;方向为相对速度沿牵连角速度的方向转过90°之后的方向。 P直接标注在图上)。 二、试求出图示各机构在图示位置时全部瞬心的位置(用符号 ij
12 三、 在图a 所示的四杆机构中,l AB =60mm,l CD =90mm ,l AD =l BC =120mm ,ω2=10rad/s ,试用瞬心法求: 1)当φ=165°时,点C 的速度v C ; 2)当φ=165°时,构件3的BC 线上速度 a ) 24) 14(P 13) P 24 P 23→∞
游梁式抽油机是以游梁支点和曲柄轴中心的连线做固定杆,以曲柄,连杆和游梁后臂为三个活动杆所构成的四连结构。 1.1四连杆机构运动分析: 图1 复数矢量法: 为了对机构进行运动分析,先建立坐标系,并将各构件表示为杆矢量。结构封闭矢量方程式的复数矢量形式: 3121234i i i l e l e l e l ???+=+ (1) 应用欧拉公式cos sin i e i θθθ=+将(1)的实部、虚部分离,得 1122433112233cos cos cos sin sin sin l l l l l l l ??????+=+? ?+=? (2) 由此方程组可求得两个未知方位角23,??。 当要求解3?时,应将2?消去可得 2222234134313311412cos 2cos()2cos l l l l l l l l l l ????=++---- (3) 解得 3tan(/2)(/()B A C ?=- (4) 33 233 sin arctan cos B l A l ???+=+ (5) 其中:411 11 2222 32 3 cos sin 2A l l B l A B l l C l ??=-=-++-= (4)式中负号对应的四连杆机构的图形如图2所示,在求得3?之后,可利用(5)求得2?。
图2 由于初始状态1?有个初始角度,定义为01?,因此,我们可以得到关于011t ??ω=+, ω是曲柄的角速度。而通过图形3分析,我们得到OA 的角度0312 π θ??=- -。 因此悬点E 的位移公式为||s OA θ=?,速度||ds d v OA dt dt θ = =,加速度2222||dv d s d a OA dt dt dt θ===。 图3 已知附录4给出四连杆各段尺寸,前臂AO=4315mm ,后臂BO=2495mm , 连杆BD=3675mm ,曲柄半径O ’D=R=950mm ,根据已知条件我们推出''||||||||OO O D OB BD +>+违背了抽油系统的四连结构基本原则。为了合理解释光杆悬点的运动规律,我们对四连结构进行简化,可采用简谐运动、曲柄滑块结构进行研究。 1.2 简化为简谐运动时的悬点运动规律 一般我们认为曲柄半径|O ’D|比连杆长度|BD|和游梁后臂|OA|小很多,以至于它与|BD|、|OA|的比值可以忽略。此时,游梁和连杆的连接点B 的运动可以看为简谐运动,即认为B 点的运动规律和D 点做圆周运动时在垂直中心线上的投影的运动规律相同。则B 点经过时间t 时的位移B s 为
本科生毕业设计 基于MATLAB的双摇杆机构运动分析与仿真 Based on the MATLAB double rocker organization movement analysis and simulation
基于MATLAB/SIMULINK的双摇杆机构运动学分析与仿 真 邹凯旋 云南农业大学工程技术学院,昆明黑龙潭650201 摘要 平面连杆机构的应用十分广泛,它的分析及设计一直是机构学研究的一个重要课题。MATLAB的Simulink是一个对动态系统建模和仿真分析的软件包,为信号与系统仿真实验提供了很好的平台。借助其强大的模拟仿真分析功能可以方便的实现机构性能分析和动态仿真,降低分析的难度,有效提高设计工作效率、产品开发质量、降低开发成本。本设计课题以MATLAB的simulink\simMechanics 动态模拟仿真工具为平台,对双摇杆机构进行运动分析。结果表明该仿真方法能方便、准确的得到机构的运动、动力数据,能为机构的选择、优化设计提供参考依据。应用此工具可很好地对机械系统的各种运动进行分析,构造出平面连杆机构的数学模型。通过对此数学模型分析,分离出可独立求解的机构模型,并用相应的机构分析方法对它进行求解,建立了平面连杆机构运动学分析专家系统。系统可完成部分平面连杆机构的运动学分析及动画仿真,从而为机械系统的建模仿真提供一个强大而方便的工具。 关键词:连杆机构;动态仿真;SimMechanics;数学模型
Based on the MATLAB double rocker organization movement analysis and simulation Zou kaixuan Faculty of Engineering and Technology Yunan Agricultural University,Heilongtan Kunming 650201 ABSTRACT Planar linkage mechanism used widely, its analysis and design of the study of institutions has been an important subject. MATLAB Simulink is a dynamic system modeling and simulation software package, for signal and system simulation results provide a good platform. With its powerful simulation analysis function is realized the performance analysis and the dynamic simulation institutions, reduce the difficulties of analysis, effectively improve the design work efficiency and product development quality, reduce development costs. This design task to MATLAB simulink \ simMechanics dynamic simulation tools as the platform, on the double rocker organization motion analysis. The results show that the simulation method can conveniently, accurately to get the kinematic and dynamic data organization, for the choice of institutions, optimum design to provide the reference. This tool can application is mechanical system analysis of all kinds of sports, constructed the mathematical model of the planar linkage mechanism. Through mathematical model to analysis, separating out can be independent of solving mechanism model, and the corresponding institutions analysis method to solve it, a planar linkage mechanism kinematic analysis of the expert system. System can finish part of planar linkage mechanism kinematic analysis and animated simulation, thus for mechanical system modeling simulation provide a strong and convenient tool. Key words: linkage;Dynamic Simulation;SimMechanics;mathematical model
平面连杆机构的运动分析和动力分析1.1 机构运动分析的任务、目的和方法 曲柄摇杆机构是平面连杆机构中最基本的由转动副组成的四杆机构,它可以用来实现转动和摆动之间运动形式的转换或传递动力。 对四杆机构进行运动分析的意义是:在机构尺寸参数已知的情况下,假定主动件(曲柄)做匀速转动,撇开力的作用,仅从运动几何关系上分析从动件(连杆、摇杆)的角位移、角速度、角加速度等运动参数的变化情况。还可以根据机构闭环矢量方程计算从动件的位移偏差。上述这些内容,无论是设计新的机械,还是为了了解现有机械的运动性能,都是十分必要的,而且它还是研究机械运动性能和动力性能提供必要的依据。 机构运动分析的方法很多,主要有图解法和解析法。当需要简捷直观地了解机构的某个或某几个位置的运动特性时,采用图解法比较方便,而且精度也能满足实际问题的要求。而当需要精确地知道或要了解机构在整个运动循环过程中的运动特性时,采用解析法并借助计算机,不仅可获得很高的计算精度及一系列位置的分析结果,并能绘制机构相应的运动线图,同时还可以把机构分析和机构综合问题联系起来,以便于机构的优化设计。 1.2 机构的工作原理 在平面四杆机构中,其具有曲柄的条件为: a.各杆的长度应满足杆长条件,即: 最短杆长度+最长杆长度≤其余两杆长度之和。 b.组成该周转副的两杆中必有一杆为最短杆,且其最短杆为连架杆或机架(当最短杆为连架杆时,四杆机构为曲柄摇杆机构;当最短杆为机架时,则为双曲柄机构)。 第一组(2代一套)四杆机构L1=125.36mm,L2=73.4mm,L3=103.4mm,L4=103.52mm 最短杆长度+最长杆长度(125.36+73.4) ≤其余两杆长度之和(103.4+103.52) 最短杆为连架杆,四杆机构为曲柄摇杆机构 第二组(2代二套)四杆机构L1=125.36mm,L2=50.1mm,L3=109.8mm,L4=72.85mm 最短杆长度+最长杆长度(125.36+50.1) ≤其余两杆长度之和(109.8+72.85) 最短杆为连架杆,四杆机构为曲柄摇杆机构 第三组(3代)四杆机构L1=163.2mm,L2=61.6mm,L3=150mm,L4=90mm 最短杆长度+最长杆长度(163.2+61.6) ≤其余两杆长度之和(150+90) 最短杆为连架杆,四杆机构为曲柄摇杆机构 在如下图1所示的曲柄摇杆机构中,构件AB为曲柄,则B点应能通过曲柄与连杆两次共线的位置。 1.3 机构的数学模型的建立 图1机构结构简图 在用矢量法建立机构的位置方程时,需将构件用矢量来表示,并作出机构的封闭矢量多边形。如图1所示,先建立一直角坐标系。设各构件的长度分别为L1 、L2 、L3 、L4 , 其方位角为、、、。以各杆矢量组成一个封闭矢量多边形,即ABCDA。其个矢量之和必等于零。即:
平面四杆机构的运动仿真模型分析1前言 平面四杆机构是是平面连杆机构的基础,它虽然结构简单,但其承载能力大,而且同样能够实现多种运动轨迹曲线和运动规律,因而在工程实践中得到广泛应用。 平面四杆机构的运动分析, 就是对机构上某点的位移、轨迹、速度、加速度进行分析, 根据原动件的运动规律, 求解出从动件的运动规律。平面四杆机构的运动设计方法有很多,传统的有图解法、解析法和实验法。随着计算机技术的飞速发展,机构设计及运动分析已逐渐脱离传统方法,取而代之的是计算机仿真技术。本文在UG NX5环境下对平面四杆机构进行草图建模,通过草图中的尺寸约束、几何约束及动画尺寸等功能确定各连杆的尺寸,之后建立相应的连杆、运动副及运动驱动,对建立的运动模型进行运动学分析,给出构件上某点的运动轨迹及其速度和加速度变化规律曲线,文章最后简要分析几个应用于工程的平面四杆机构实例。 2平面四杆机构的建模 问题的提出 平面四杆机构因其承载能力大,可以满足或近似满足很多的运动规律,所以其应用非常广泛,本文以基于曲柄摇杆机构的物料传送机构为例,讨论其建模及运动分析。 如图1所示,ABCD为曲柄摇杆机构,曲柄AB为主动件,机构在运动中要求连杆BC的延伸线上E 点保持近似直线运动,其中直线轨迹为工作行程,圆弧轨迹为回程或空程,从而实现物料传送的功能。
平面四杆机构的建模 由于物料传送机构为曲柄摇杆机构,所以它符合曲柄存在条件。根据机械原理课程中的应用实例[1],选取AB=100,BC=CD=CE=250,AD=200,单位均为毫米。 在UG NX5的Sketch环境里,创建如图2所示的草图,并作相应的尺寸约束和几何约束,其中EE'为通过E点的水平轨迹参考线,用以检验E点的工作行程运动轨迹。现通过草图里的尺寸动画功能,令AB与AD 的夹角从0°到360°变化,可看到E点的变化轨迹为直线和圆弧,如图3所示为尺寸动画的四个截图,其中图3(a)中的E点为水平轨迹的起点,图3(b)中的E点为水平轨迹的中点,图3(c)中的E点为水平轨迹的终点,而图3(d)中的E点为圆弧轨迹(图中未画出)即回程的中点。