第16卷 第5期强激光与粒子束Vol.16,No.5 2004年5月HIGH POWER LASER AND PAR TICL E B EAMS May,2004
文章编号:100124322(2004)0520563204
激光雷达测量大气温度的傅里叶分析方法Ξ
王 刚1,2,王仕 1
(1.电子科技大学 物理电子学院,四川 成都610054;2.烟台师范学院物理与电子工程学院,山东 烟台 264025)
摘 要: 在对流层(小于12km),由于大气中气溶胶的存在,传统的利用大气中瑞利散射光谱测量大气温
度的方法具有一定的局限性。借助傅里叶分析方法对不同高度的大气后向散射光谱通过碘吸收池所产生的不
同透过率曲线进行处理,同时考虑了对流层中气溶胶的影响,可得到对流层中不同高度、不同大气后向散射比
条件下的温度轮廓线。
关键词: 激光雷达;大气温度测量;瑞利散射;米散射;后向散射比
中图分类号: TB96 文献标识码: A
Ξ收稿日期:2003209202; 修订日期:2003211217
基金项目:四川省科技厅基金资助课题(J SA2011)
作者简介:王刚(1970—),男,电子科技大学硕士研究生,现从事信息光学方面的研究工作;工作单位为烟台师范学院。
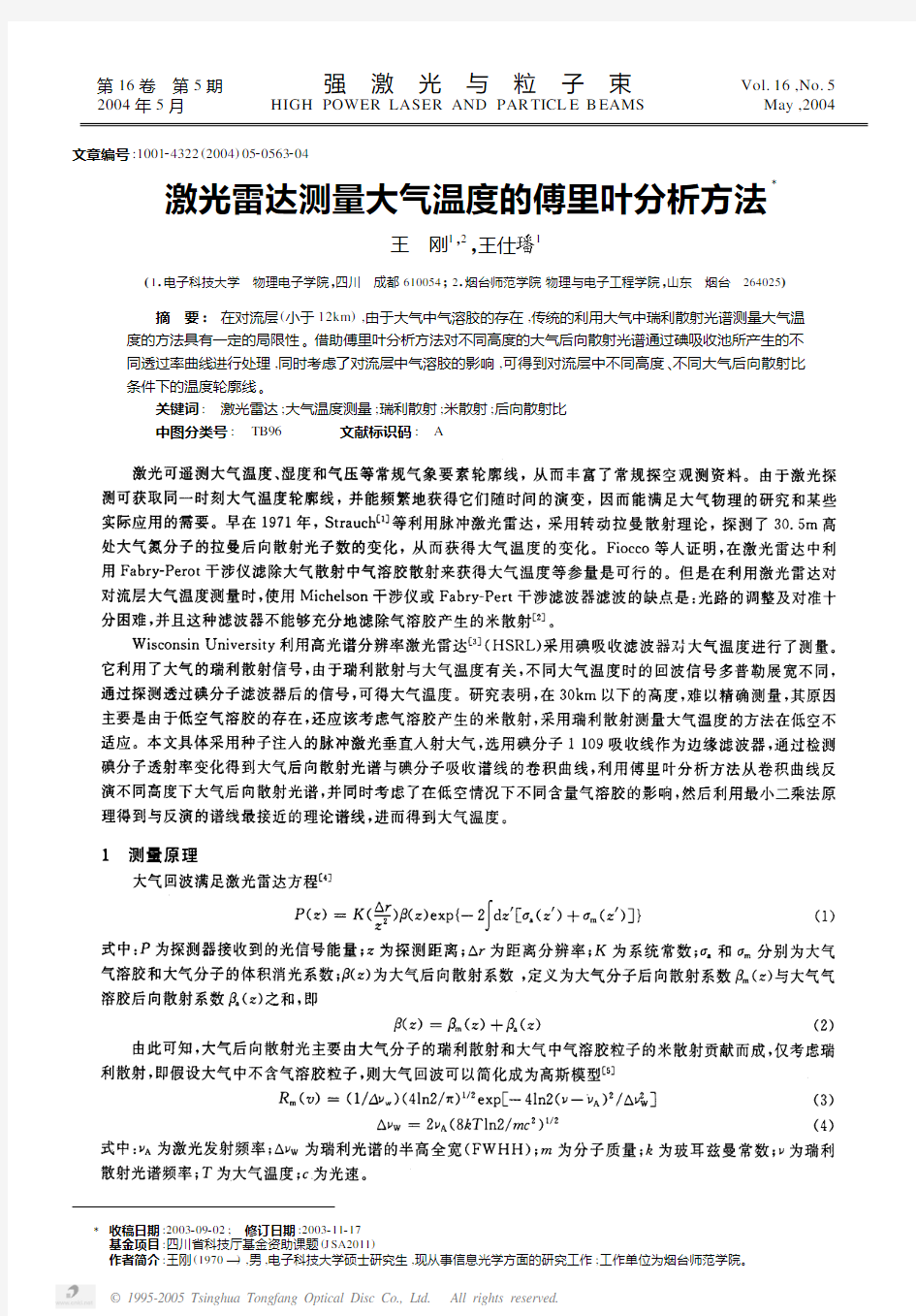
由此可知,在纯净大气中只要得到瑞利光谱的FWHH,即可得到对应的大气温度。但在低空中,上述方法的局限性很大。由于气溶胶粒子的存在,将导致大气后向散射比(R b)发生变化,R b[6]一般定义为
R b(r)=[βa(r)+βm(r)]/βm(r)(5) 利用大气分子和气溶胶散射比,可以模拟计算得到瑞利散射和气溶胶散射的混合信号[7]。图1为模拟得到的温度T=268K,R b=8时的大气后向散射光谱曲线。由于大气中气溶胶粒子的存在,使得此时的大气回波曲线与该温度下的瑞利散射曲线在光谱分布上有很大的差异,原有的通过直接测量瑞利光谱的FWHH,即可得到对应的大气温度T的方法已经不再适用。因此我们考虑用激光雷达得到的检测信号反演出实际的大气后向散射光谱,然后把实际曲线与理论曲线通过最小均方差拟合来得到当时条件下的大气温度值。
问题的关键是怎样从检测信号中无失真地反演出实际的大气后向散射光谱。我们首先考虑选用原子(分子)滤波器作为大气后向散射光谱信号的检测手段。它是20世纪80年代末发展成熟的一类超窄带(约为01001nm)共振滤波器,具有超窄带、高灵敏度和对背景噪声高抑制的特性。该类滤波器利用的是原子或分子固有的光谱吸收特性,光谱吸收线的峰值位置是固定不变的,吸收线的宽度由原子或分子蒸汽压力和温度确定。只要将滤波器置于恒温恒压环境中,则吸收线可作为频率的绝对标准。本系统中采用碘分子滤波器作为频率的绝对标准。分子碘在激光出射频率532nm附近,即18786~18789cm-1有8根主要的多普勒吸收线,
其吸收线系数为1104~1112,文中使用127I2中1109吸收线作为激光器和回波信号的频率标准[8]
。
Fig.1 Back2scattering spectrum from atmosphere(T=268K,R b=8)图1 T=268K,R b=8
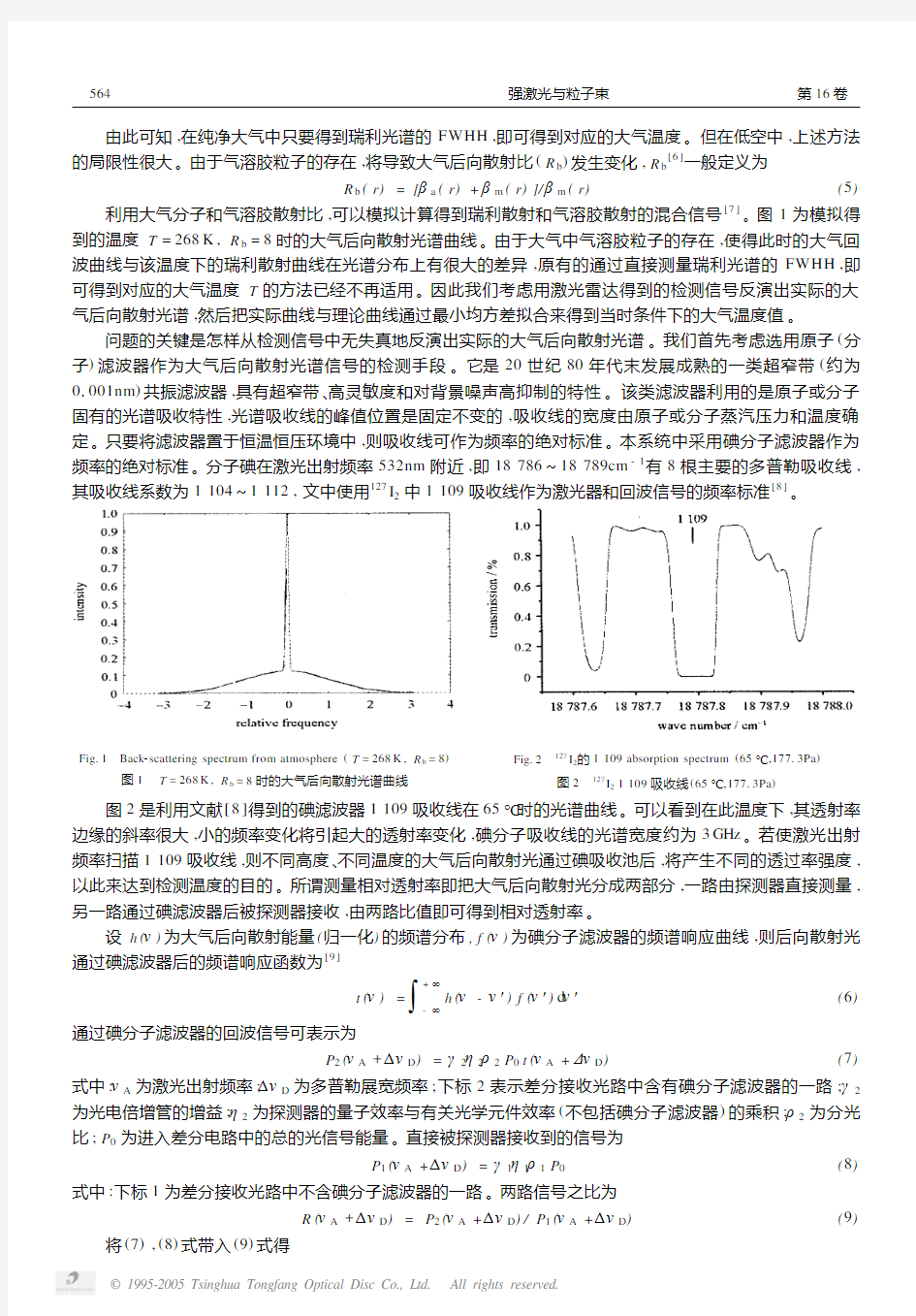
时的大气后向散射光谱曲线Fig.2 127I2的1109absorption spectrum(65℃,177.3Pa)图2 127I21109吸收线(65℃,177.3Pa)
图2是利用文献[8]得到的碘滤波器1109吸收线在65℃时的光谱曲线。可以看到在此温度下,其透射率边缘的斜率很大,小的频率变化将引起大的透射率变化,碘分子吸收线的光谱宽度约为3GHz。若使激光出射频率扫描1109吸收线,则不同高度、不同温度的大气后向散射光通过碘吸收池后,将产生不同的透过率强度,以此来达到检测温度的目的。所谓测量相对透射率即把大气后向散射光分成两部分,一路由探测器直接测量,另一路通过碘滤波器后被探测器接收,由两路比值即可得到相对透射率。
设h(ν)为大气后向散射能量(归一化)的频谱分布,f(ν)为碘分子滤波器的频谱响应曲线,则后向散射光通过碘滤波器后的频谱响应函数为[9]
t(ν)=∫+∞-∞h(ν-ν′)f(ν′)dν′(6)通过碘分子滤波器的回波信号可表示为
P2(νA+ΔνD)=γ2η2ρ2P0t(νA+ΔνD)(7)式中:νA为激光出射频率;ΔνD为多普勒展宽频率;下标2表示差分接收光路中含有碘分子滤波器的一路;γ2为光电倍增管的增益;η2为探测器的量子效率与有关光学元件效率(不包括碘分子滤波器)的乘积;ρ2为分光比;P0为进入差分电路中的总的光信号能量。直接被探测器接收到的信号为
P1(νA+ΔνD)=γ1η1ρ1P0(8)式中:下标1为差分接收光路中不含碘分子滤波器的一路。两路信号之比为
R(νA+ΔνD)=P2(νA+ΔνD)/P1(νA+ΔνD)(9) 将(7),(8)式带入(9)式得
465 强激光与粒子束 第16卷
R (νA +ΔνD )=Ct (νA +ΔνD )(10)
式中:C 为常数,由系统校正确定。通过测量R (νA +ΔνD ),并由(6)式即可认为R (νA +ΔνD )是大气后向散射
光谱与碘滤波器频谱响应曲线的卷积。
2 理论模拟
我们考虑用傅里叶光学分析方法对卷积曲线进行相应的运算、处理,得到当时的大气后向散射光谱曲线。
利用图1、图2的系统参数可模拟得到R (νA +ΔνD ),图3(a )表示温度T 相同,R b 不同的后向散射光通过碘分
子滤波器的卷积曲线,图3(b )表示卷积曲线在时域中进行退卷积的结果
。
Fig.3 Convolution curves (a )and deconvolution results (b )of different back 2scattering spectrum through an iodine absorption cell
图3 不同散射光通过碘分子滤波器的卷积曲线(a )及退卷积结果(b )
运用傅里叶变换对频域进行分析,(6)式可以改写为
T (f ν)=H (f ν)F (f ν)(10)
式中:T ,H ,F 分别为(6)式中t ,h ,f 的傅里叶变换函数。因此从频域的观点出发,前面所推导的直接退卷积
的方法,可以运用频谱函数相除求出H (f ν),然后通过傅里叶逆变换求出h (ν
)。图4(a )~(c )分别为T =260K ,R b =1时碘吸收线、大气回波及卷积曲线的频谱分析
。
Fig.4 Iodine absorption spectrum (a ),back 2scattering spectrum (b )and convolution curve (c )in the frequency domain (T =260K ,R b =1)
图4 T =260K ,R b =1时碘吸收线(a ),大气回波(b )及卷积曲线(c )的频谱分析
由以上讨论可知,在实际测量中,利用可调谐的脉冲倍频Nd :YA G 激光器作垂直方向上的频率扫描,取样频率为125MHz ,得到不同高度不同温度下的大气后向散射光谱与碘分子吸收线的响应曲线,利用傅里叶光学分析方法即可得到相应的大气后向散射光谱。在此方法中,探测灵敏度可以定义为单位温度变化所引起的透射率变化,因此,利用碘分子吸收滤波器探测大气垂直高度温度的灵敏度[10]为
S (ν,T )=d R (ν,T )d T 1R =[(R b -1)d F a (ν,T )d T +d F m (ν,T )d T
]/[(R b -1)F a (ν,T )+F m (ν,T )](11)
式中:R (ν,T )为同一扫描频率不同温度下的大气后向散射曲线与碘分子的卷积曲线;F a (ν,T ),F m (ν,T )分别为大气中气溶胶、分子与碘分子吸收线的卷积曲线。设ν0为碘分子1109吸收线的中心频率。
图5(a )表示激光出射频率ν比中心频率ν0低1GHz 的测温灵敏度;图5(b )表示激光出射频率ν比中心频率ν0高1GHz 的测温灵敏度,从图中可以看出随着R b 的增大灵敏度在降低。
5
65第5期 王 刚等:激光雷达测量大气温度的傅里叶分析方法
Fig.5 Sensitivity of measuring temperature under the condition of different transmission frequency and R b
图5 不同激光出射频率以及不同R b 条件下的测温灵敏度
综上所述,无论从频谱域还是从时域分析,都可得到大气后向散射光谱信息,然后把实测大气后向散射曲线与理论模拟的大气后向散射光谱通过最小均方差拟合比较,得到此时的大气温度和大气后向散射比。3 结 论
本文报道了利用碘分子滤波器的激光雷达测量大气温度的傅里叶光学分析方法,对测量原理给予了祥细的说明和分析。该系统采用碘分子滤波器作为多普勒频率展宽鉴频器,激光频率扫描碘吸收线,利用傅里叶分析方法求得大气后向散射光谱曲线。如想进一步提高测量精度,可采用光子计数技术。这种激光雷达系统使用的是固体激光器,体积小,功耗低,便于集成化。发展高分辨激光测温系统,有利于气象和环境的研究。参考文献:
[1] Strauch R G ,Derr V E ,Cupp R E.Atmospheric temperature measurement using Raman backscatter [J ].A ppl Opt ,1971,10(12):2665—
2669.
[2] Hair J W ,Caldwell L M ,Krueger D A ,et al.High 2spectral 2resolution lidar with iodine 2vapor filters :measurement of atmospheric 2state and aerosol
profiles[J ].A ppl Opt ,2001,40(30):20.
[3] Piironen P ,Eloranta E W.Demonstration of a high 2spectral 2resolution lidar based on an iodine absorption filter[J ].Optics Letters ,1994,19(3):
1.
[4] 孙景群.激光大气探测[M ].北京:科学出版社,1986.(Sun J Q.Atmosphere detecting by lidar.Beijing :Science Press ,1986)
[5] Measures R https://www.doczj.com/doc/ae5296137.html,ser remote sensing fundamentals and applications [M ].New Y ork :A Wiley 2Interscience Publication ,John Wiley and Sons ,
1984.
[6] Liu Z S ,Wu D ,Liu J T ,et al.Low 2altitude atmospheric wind measurement from the combined Mie and Rayleigh backscattering by Doppler lidar
with an iodine filter[J ].A ppl Opt ,2002,41(33):7079—7086.
[7] Alvarez R J ,Caldwell L M ,Y H Li ,et al.High spectral resolution lidar measurement of tropospheric backscatter ratio using barium atomic blocking
filters[J ].J of A t mospheric and Oceanic Technology ,1990,7(6):876.
[8] G erstenkorn S ,Luc P.Atlas du spectre d ’absorption de la molecule lode[M ].Laboratoire Aime Cottou ,Orsay France 1980.
[9] K orb C L ,G entry B M ,Li S X.Edge technique Doppler lidar wind measurements with high vertical resolution[J ].A ppl Opt ,1997,36:5976.
[10] 陈卫标,张亭禄,吴东,等.原子廓线激光多普勒测速仪[J ].光学学报,1997,17:346—350.(Chen W B ,Zhang T L ,Wu D ,et al.Atomic
outline for laser Doppler velocimetry[J ].Acta Optica Si nica ,1997,17:346—350)
Fourier analysis method of measuring atmosphere temperature by lidar
WAN G G ang 1,2, WAN G Shi 2fan 1
(1.School of Physical Elect ronics ,U niversity of Elect ronic Science and Technology of China ,Chengdu 610054,China ;
2.School of Physics and Elect ronic Engineering ,Yantai Norm al College ,Yantai 264025,China )
Abstract : Owing to the presence of aerosol in the troposphere (below 12km ),traditional method which uses Rayleigh scattering spectrum to measure the atmos phere temperature has certain limitations.This paper uses a Fourier analysis method to proceed transmis 2sion curve produced by atmospheric back 2scattering spectrum through the iodine cell ,considering the influence of the aerosol.This method can obtain the tem perature profile of the troposphere under the condition of different height and different back 2scattering ratio. K ey w ords : Lidar ; Atmospheric temperature measurement ; Rayleigh scattering ; Mie scattering ; Back 2scattering ratio
665 强激光与粒子束 第16卷
傅里叶分析之掐死教程(完整版)更新于2014.06.06 Heinrich · 6 个月前 作者:韩昊知乎:Heinrich 微博:@花生油工人知乎专栏:与时间无关的故事 谨以此文献给大连海事大学的吴楠老师,柳晓鸣老师,王新年老师以及张晶泊老师。 转载的同学请保留上面这句话,谢谢。如果还能保留文章来源就更感激不尽了。 我保证这篇文章和你以前看过的所有文章都不同,这是12年还在果壳的时候写的,但是当时没有来得及写完就出国了……于是拖了两年,嗯,我是拖延症患者…… 这篇文章的核心思想就是: 要让读者在不看任何数学公式的情况下理解傅里叶分析。 傅里叶分析不仅仅是一个数学工具,更是一种可以彻底颠覆一个人以前世界观的思维模式。但不幸的是,傅里叶分析的公式看起来太复杂了,所以很多大一新生
上来就懵圈并从此对它深恶痛绝。老实说,这么有意思的东西居然成了大学里的杀手课程,不得不归咎于编教材的人实在是太严肃了。(您把教材写得好玩一点会死吗?会死吗?)所以我一直想写一个有意思的文章来解释傅里叶分析,有可能的话高中生都能看懂的那种。所以,不管读到这里的您从事何种工作,我保证您都能看懂,并且一定将体会到通过傅里叶分析看到世界另一个样子时的快感。至于对于已经有一定基础的朋友,也希望不要看到会的地方就急忙往后翻,仔细读一定会有新的发现。 ——————————————以上是定场诗—————————————— 下面进入正题: 抱歉,还是要啰嗦一句:其实学习本来就不是易事,我写这篇文章的初衷也是希望大家学习起来更加轻松,充满乐趣。但是千万!千万不要把这篇文章收藏起来,或是存下地址,心里想着:以后有时间再看。这样的例子太多了,也许几年后你都没有再打开这个页面。无论如何,耐下心,读下去。这篇文章要比读课本要轻松、开心得多…… p.s.本文无论是cos还是sin,都统一用“正弦波”(Sine Wave)一词来代表简谐波。 一、什么是频域 从我们出生,我们看到的世界都以时间贯穿,股票的走势、人的身高、汽车的轨迹都会随着时间发生改变。这种以时间作为参照来观察动态世界的方法我们称其为时域分析。而我们也想当然的认为,世间万物都在随着时间不停的改变,并且永远不会静止下来。但如果我告诉你,用另一种方法来观察世界的话,你会发现世界是永恒不变的,你会不会觉得我疯了?我没有疯,这个静止的世界就叫做频域。 先举一个公式上并非很恰当,但意义上再贴切不过的例子: 在你的理解中,一段音乐是什么呢?
什么是色散呢? 当光纤的输入端光脉冲信号经过长距离传输以后,在光纤输出端,光脉冲波形发生了时域上的展宽,这种现象即为色散。以单模光纤中的色散现象为例,如下图所示: 如何消除色度色散对DWDM系统的影响: 对于DWDM系统,由于系统主要应用于1550nm窗口,如果使用G.652光纤,需要利用具有负波长色散的色散补偿光纤(DCF),对色散进行补偿,降低整个传输线路的总色散。 光的衍射 光在传播过程中,遇到障碍物或小孔时,光将偏离直线传播的途径而绕到障碍物后面传播的现象,叫光的衍射(Diffraction of light)。 光的衍射和光的干涉一样证明了光具有波动性。
物理学中,干涉(interference)是两列或两列以上的波在空间中重叠时发生叠加从而形成新的波形的现象。 光的干涉 光的干涉现象是波动独有的特征,如果光真的是一种波,就必然会观察到光的干涉现象。定义:两列或几列光波在空间相遇时相互叠加,在某些区域始终加强,在另一些区域则始终削弱,形成稳定的强弱分布的现象,证实了光具有波动性。 两束光发生干涉后,干涉条纹的光强分布与两束光的光程差/相位差有关:当相位差为周期的整数倍时光强最大;当相位差为半周期的奇数倍时光强最小。从光强最大值和最小值的和差值可以定义干涉可见度作为干涉条纹清晰度的量度。 只有两列光波的频率相同,相位差恒定,振动方向一致的相干光源,才能产生光的干涉。由两个普通独立光源发出的光,不可能具有相同的频率,更不可能存在固定的相差,因此,不能产生干涉现象。 大气气溶胶 大气气溶胶是液态或固态微粒在空气中的悬浮体系。它们能作为水滴和冰晶的凝结核、太阳辐射的吸收体和散射体,并参与各种化学循环,是大气的重要组成部分。雾、烟、霾等都是天然或人为原因造成的大气气溶胶。 大气气溶胶是悬浮在大气中的固态和液态颗粒物的总称,粒子的空气动力学直径多在0.001~100μm之间,非常之轻,足以悬浮于空气之中,当前主要包括6 大类7种气溶胶粒子,即:沙尘气溶胶、碳气溶胶(黑碳和有机碳气溶胶)、硫酸盐气溶胶、硝酸盐气溶胶、铵盐气溶胶和海盐气溶胶。 散射特性:气溶胶质点能发生光的散射,这是使天空成为蓝色,太阳落山时成为红色的原因。 多普勒频移 当移动台以恒定的速率沿某一方向移动时,由于传播路程差的原因,会造成相位和频率的变化,通常将这种变化称为多普勒频移。 多普勒效应造成的发射和接收的频率之差称为多普勒频移。它揭示了波的属性在运动中发生变化的规律。 主要内容为:物体辐射的波长因为波源和观测者的相对运动而产生变化。在运动的波源前面,波被压缩,波长变得较短,频率变得较高(蓝移blue shift)。多普勒频移,当运动在波源后面时,会产生相反的效应。波长变得较长,频率变得较低(红移red shift)。 多普勒频移及信号幅度的变化等如图所示。当火车迎面驶来时,鸣笛声的波长被压缩(如图2右侧波形变化所示),频率变高,因而声音听起来尖利刺耳。当火车远离时,声音波长就被拉长(如图2左侧波形变化所示),频率变低,从而使得声音听起来减缓且低沉。
激光雷达回波信号仿真模拟研究 摘要 关键字 第一章绪论 第一节引言 激光雷达(Lidar:Li ght D etection A nd R anging),是一种用激光器作为辐射源的雷达,是激光技术与雷达技术完美结合的产物。激光雷达的最基本的工作原理与我们常见的普通雷达基本一致,即由发射系统发射一个信号,信号到达作用目标后会产生一个回波信号,我们将回波信号经过收集处理后,就可以获得所需要的信息。与普通雷达不同的是,激光雷达的发射信号是激光而普通雷达发射的信号是无线电波,两者在波长上相比,激光信号要短的多。由于激光的高频单色光的特性,激光雷达具有了许多普通雷达无法比拟的特点,比如分辨率高,测量、追踪精度高,抗电子干扰能力强,能够获得目标的多种图像,等等。因此,利用激光雷达对大气进行监测,收集、分析数据,建立一个大气环境预测理论模型,这将会成为研究气候变化和寻求解决对策的一项重要武器。 第二节本文的选题意义 由于投入巨大,在研制激光雷达实物之前,我们需要进行模拟与仿真研究,预测即将研制的激光雷达的各性能指标,评价总体方案的可行性。激光雷达回拨信号仿真模拟就是利用现代仿真技术,逼真的复现雷达回波信号的动态过程,它是现代计算机技术、数字模拟技术和激光雷达技术相结合的产物。仿真模拟的对象是激光雷达的探测没标以及它所处的环境,模拟的手段是利用计算机和相关设备以及相关程序,模拟的方式是复现包含着激光雷达目标和目标环境信息的雷达信号。通过激光雷达回波信号的仿真模拟,进而产生回波信号,我们可以在实际雷达系统前端不具备条件的情况下,对激光雷达系统的后级设备进行调试。 第三节本文的研究思路和结构安排 本文主要研究面向气象服务应用的大气激光雷达。笔者在熟悉激光雷达的基本工作原理的前提下,学习和熟悉各种参数对大气回波能量的影响,进而学习和掌握matlab编程语言,并且根据给定的激光雷达系统参数、大气参数和光学参数,以激光雷达方程为基础,通过仿真模拟得到理想状态下的大气回波信号。但是,在实际测量工作中,由于大气中的各种干扰,我们获得的回波信号并不和理想状态下的大气回波信号一致,因此,在本文的后期工作中,笔者根据已有的大量激光雷达实测信号与模拟信号对比,既能验证仿真模拟结果的准确性,又能应用于激光雷达的性能指标等方面的分析上,具有比较高的实际应用价值。 第二章激光雷达的原理 第一节激光雷达系统 一个标准的激光雷达系统应该包含以下部件:激光器、发射系统、接收系统、光学系统、信号处理系统以及显示系统。它的工作原理图我们可以用下图表示:
大体积混凝土测温记录 表 公司标准化编码 [QQX96QT-XQQB89Q8-NQQJ6Q8-MQM9N]
大体积混凝土测温记录表
一、测温结果应在以下范围中才使砼不易产生裂缝: 混凝土浇筑体在入模温度基础上的温升值不宜大于50°C; 混凝土浇筑块体的里表温差不宜大于25°C; 混凝土浇筑体的降温速率不宜大于2.0°C/d; 混凝土浇筑体表面与大气温差不宜大于20°C。 二、根据混凝土浇注时温度变化的特点,系统设备作以下配置,一台 DM6902数字温度仪一台,K型电偶(NICR-NIAL)传感器。 三、入模测温,每台班不少于2次。配备专职测温人员,按两班考虑,对测温人员要进行培训和技术交底。测温人员要认真负责,按时按孔测温,前3天每2小时测温1次,每昼夜不得少于4次,不得遗漏或弄虚作假。测温记录要填写清楚、整洁,换班时要进行交底。 四、测温工作应连续进行,持续测温及混凝土强度达到时间,经技术部门同意后方可停止测温,一般宜连续监测15天左右。 五、测温时发现温度异常,应及时通知技术部门和项目技术负责人,以便及时采取相应措施。 六、承台分两次浇筑完成,每层测温组共分6组,每组三个测点,三个测点分别为底:距底部100~150MM;中:在浇筑厚度的中部;表:在距浇筑表面100~150MM部位。具体位置见下面测点平面布置图片。 为了控制砼内外温差不超过25度,因此要做好混凝土测温,方法是:在每个施工区域砼内部埋设测温管,测温管下口封闭(焊铁板),每个测温点埋设3条测温管,混凝土表面、中部、底部各一条。当砼浇筑后强度达到能够上人,约8小时开始采用普通玻璃温度计测温。8h—24h每2h/次;1d—3d每4h/次;3d—7d每8h/次;7d以上每1d/次。
这篇文章的核心思想就是:要让读者在不看任何数学公式的情况下理解傅里叶分析。 傅里叶分析不仅仅是一个数学工具,更是一种可以彻底颠覆一个人以前世界观的思维模式。 一、嘛叫频域 关键词:从侧面看 从我们出生,我们看到的世界都以时间贯穿,股票的走势、人的身高、汽车的轨迹都会随着时间发生改变。这种以时间作为参照来观察动态世界的方法我们称其为时域分析。而我们也想当然的认为,世间万物都在随着时间不停的改变,并且永远不会静止下来。但如果我告诉你,用另一种方法来观察世界的话,你会发现世界是永恒不变的,你会不会觉得我疯了?我没有疯,这个静止的世界就叫做频域。 先举一个公式上并非很恰当,但意义上再贴切不过的例子:在你的理解中,一段音乐是什么呢? 这是我们对音乐最普遍的理解,一个随着时间变化的震动。但我相信对于乐器小能手们来说,音乐更直观的理解是这样的: 上图是音乐在时域的样子,而下图则是音乐在频域的样子。所以频域这一概念对大家都从不陌生,只是从来没意识到而已。 现在我们可以回过头来重新看看一开始那句痴人说梦般的话:世界是永恒的。 将以上两图简化: 时域: 频域: 在时域,我们观察到钢琴的琴弦一会上一会下的摆动,就如同一支股票的走势;而在频域,只有那一个永恒的音符。 你眼中看似落叶纷飞变化无常的世界,实际只是躺在上帝怀中一份早已谱好的乐章。
傅里叶同学告诉我们,任何周期函数,都可以看作是不同振幅,不同相位正/余弦波的叠加。在第一个例子里我们可以理解为,利用对不同琴键不同力度,不同时间点的敲击,可以组合出任何一首乐曲。 而贯穿时域与频域的方法之一,就是传中说的傅里叶分析。傅里叶分析可分为傅里叶级数(Fourier Serie)和傅里叶变换(Fourier Transformation),我们从简单的开始谈起。 二、傅里叶级数(Fourier Series) 如果说能用余弦曲线波叠加出一个带90度角的矩形波来,你会相信吗?但是看看下图: 第一幅图是一个郁闷的余弦波cos(x) 第二幅图是2个卖萌的余弦波的叠加cos(x)+a cos(3x) 第三幅图是4个发春的余弦波的叠加 第四幅图是10个便秘的余弦波的叠加 随着余弦波数量逐渐的增长,他们最终会叠加成一个标准的矩形,大家从中体会到了什么道理? 随着叠加的递增,所有余弦波中上升的部分逐渐让原本缓慢增加的曲线不断变陡,而所有正弦波中下降的部分又抵消了上升到最高处时继续上升的部分使其变为水平线。一个矩形就这么叠加而成了。但是要多少个余弦波叠加起来才能形成一个标准90度角的矩形波呢?不幸的告诉大家,答案是无穷多个。 不仅仅是矩形,你能想到的任何波形都是可以如此方法用正/余弦波叠加起来的。 这是没有接触过傅里叶分析的人在直觉上的第一个难点,但是一旦接受了这样的设定,游戏就开始有意思起来了。 还是上图的余弦波累加成矩形波,我们换一个角度来看看:
编号:NJDY-CF1-01-01-01-01-00-01-01-01电土施表2—1
编号:NJDY-CF2-01-01-01-01-00-01-01-01电土施表2—1
编号:NJDY-CF3-01-01-01-01-00-01-01-01电土施表2—1 单位工程定位测量记录 编号:NJDY-CF4-01-01-01-01-00-01-01-01电土施表2—1
单位工程定位测量记录 编号:NJDY-CF5-01-01-01-01-00-01-01-01电土施表2—1
引测控制点坐 标 L3(A=1604.911,B=5374) L2(A=1604.911,B=5480) 引测水准点标高 ±0.000m相当于绝对标高 1315.328m 仪器型号及编 号 ZTS602、120070仪器校验日期2013.08.13 允许误差±5mm 定位测量示意图 复测结果: 复测合格 专业监理工程师: 年月日 测量技术负责人: 年月日 复测员: 年月日 施测员: 年月日 单位工程定位测量记录 编号:NJDY-05-45-00-01-00-01-01 电土施表2—1 单位工程名称循环水管道委托单位 中国能源建设集团东北电力 第一工程公司测量单位 中国能源建设集团东北电力 第一工程公司 监理单位 北京国电德胜工程项目管理 有限公司施测部位循环水管道施测日期2014.05.16
引测控制点坐 标 K12、K13 引测水准点标高 ±0.000m相当于绝对标高 1315.328m 仪器型号及编 号 ZTS602全站仪、 120070水准仪 仪器校验日期2013.08.13 允许误差±5mm 定位测量示意图 复测结果: 复测合格 专业监理工程师: 年月日 测量技术负责人: 年月日 复测员: 年月日 施测员: 年月日
混凝土测温规范及记录 The document was finally revised on 2021
按照国标或者地方资料软件表格要求, 当施工大体积混凝土或冬季施工时必须进行测温。 温度控制指标及测温频率: 温度监控指标如下: 内外温差:小于25℃; 降温速度:小于1~℃/d; 揭开保温层时的温差:小于15℃。 监测周期与频率如下: 混凝土浇筑初凝前:每测一次; 混凝土浇筑结束后12h:每2h 测一次; 混凝土浇筑结束后24h:每4h 测一次; 混凝土浇筑结束后72h:每8h 测一次; 混凝土浇筑结束后15d:每24h 测一次; 当内外温差小于15℃时,停止测温。 如果同条件的混凝土测温不到600c°是很正常的,在60天送检就可以了 同条件养护试块不必作混凝土测温,在现场上如果对大体积混凝土作测温也不是用同条件试块的。进入养护室的就不是同条件养护了。 所以,同条件养护试块只记录混凝土构件附近的气象温度,而不记录混凝土试块本身的温度。 PART 1: 测温记录(C2—6—12) 冬季施工时,应进行搅拌测温(包括现场搅拌、)并记录。混凝土冬施搅拌测温记录包括大气温度、温度、出罐温度、人模温度等。测温的具体要求应有书面技术交底,执行人必须按照规定操作。签字完毕后交归档。“现场搅拌或商品混凝土”字样填人“备注”栏。表格中各温度值需标注。 13.测温记录(表C2—6—13) (1)混凝土的冬期施工应符合国家现行标准《建筑工程冬期施工规程》 (JGJl04) 和方案的规定。
(2)测温起止时间指室外连续5d低于5~C时起,至室外日平均气温连续5d高于5~C冬施结束;掺加的混凝土未达到临界强度(4MPa)之前每隔2h测量一次,达到抗冻临界强度(4MPa)且温度变化正常,测温间隔时间可由2h调整为6h。(3)混凝土冬施养护测温应先绘制测温点(标明具体),包括测温点的部位、深度等。测温记录应包括大气温度、各测温孔的实测温度、同一时间测得的各测温孔的平均温度和间隔时间等。此外还应进行计算(本次、累计)。表格中各温度值需标注正负号。 (4)关于测温的项目、测温次数和测温孔设置按要求执行现行有关标准规定。14.养护测温记录 大体积混凝土施工应对人模时大气温度、各测温孔温度、内外和裂缝进行检查和记录。大体积混凝土养护测温应附测温点布置图,包括测温点的布置部位、深度等。表格中各温度值需标注正负号。 PART2: 5、冬期施工混凝土的测温工作 混凝土冬期施工测温 在离建筑物10m以外,距地面高度,通风条件较好的地方安装规格不小 于300*300*400的白色百叶箱。 测温孔位置的选择,选择在温度变化大、容易散失热量的部位、易于遭受冻结的部位,西北部或前阴的地方应多设置,测温孔的口不迎风设置,且临时封闭。 结构测孔的设置 (1)梁(包括简支撑与连接梁):梁上测温孔应垂直的,孔深为梁高的
傅里叶分析应用于热传导问题 (物理系郭素梅指导教师陆立柱) 〔摘要〕傅里叶分析是一种重要的数学工具,本文综述了用傅里叶分析解决细杆的热传导问题,并进行了讨论。傅里叶分析包括傅里叶级数和傅里叶积分,用傅里叶级数法解决有界细杆的热传导问题,用含参数的傅里叶变换法解决无界细杆的热传导问题,比其它方法更系统,体现出一种数学与物理对应的美感。 〔关键词〕傅里叶级数傅里叶积分傅里叶变换细杆的热传导问题 引言 1822年,傅里叶在研究热传导问题时,创造了傅里叶分析,随着时代的进步,这一数学工具被广泛地应用于信号分析、匹配滤波、图象处理等方面,掌握这种具有广泛用途和发展前景的工具是十分必要的.热传导是历来研究的热点,尤其是随着计算机电子设备的高集成化发展,机器内发热部件和集成电路元件的发热量随之增加,传统的强制冷方式已不能达到理想效果,因此,热传导设计成了重要问题。万变不离其宗,为了更好地掌握傅里叶分析,为了更好地掌握热传导问题,本文就一维热传导问题对傅里叶分析作了全面详尽的论述。 1.傅里叶分析 1.1 傅里叶级数 傅里叶级数在应用上有以下优点[1]:能表示不连续的函数、周期函数,能对任意函数作调 和分析。 若函数() f x以2l为周期,即 +=[2] (2)() f x l f x (1.1.1)
则可取三角函数族 1, cos x l π,cos 2x l π, … cos n x l π ,… sin x l π,sin 2x l π, (i) n x l π , … (1.1.2) 作为基本函数族,将()f x 展开为级数[3] ()f x =0 a +1 (n n a ∞ =∑cos n x l π+ n b cos n x l π) (1.1.3) 可以证明,函数族(1.1.2)是正交完备的[4]。根据三角函数族的正交性,可求得(1.1.3)中的展 开系数为 1()cos 1()sin l n l n l n l n a f d l l n b f d l l πξξξδπξξξ--?=??? ?=?? ?? (1.1.4) 其中 2(0)1 (0) n n n δ?=?=? ≠?? (1.1.3)称为周期函数()f x 的傅里叶级数展开式,其中的展开系数 (1.1.4)称为傅里叶系数。关于傅里叶级数的收敛性问题[2],有Dirichlet 定理[4]。 若周期函数是奇函数,则由傅里叶系数计算公式(1.1.4)可见,0a 及诸k a 均等于零,展开式(1.1.3)为 () f x = 1 sin n n n x b l π∞ =∑,
利用Excel进行FFT和Fourier分析的基本步骤 实例:杭州市2000人口分布密度[根据2000年人口普查的街道数据经环带(rings)平均计算得到的结果,数据由冯健博士处理]。下面的变换实质是一种空间自相关的分析过程。 第一步,录入数据 在Excel中录入数据不赘述(见表1)。 表1 原始数据序列表2 补充后的数据序列 第二步,补充数据 由于Fourier变换(FT)一般是借助快速Fourier变换(Fast Fourier Transformation, FFT)算法,而这种算法的技术过程涉及到对称处理,故数据序列的长度必须是2N(N=1,2,3,…,)。如果数据序列长度不是2N,就必须对数据进行补充或者裁减。现在数据长度是26,介于24=16到25=32之间,而26到32更近一些,如果裁减数据,就会损失许多信息。因此,采用补充数据的方式。 补充的方法非常简单,在数据序列后面加0,直到序列长度为32=25为止(表2)。当然,延续到64=26也可以,总之必须是2的整数倍。不过,补充的“虚拟数据”越多,变换结果的误差也就越大。
第三步,Fourier变换的选项设置 沿着工具(Tools)→数据分析(Data Analysis)的路径打开数据分析复选框(图1)。 图1 数据分析(Data Analysis)的路径 在数据分析选项框中选择傅立叶分析(Fourier Analysis)(图2)。 图2 数据分析(Data Analysis) 在Fourier分析对话框中进行如下设置:在输入区域中输入数据序列的单元格范围“$B$1:$B$33”;选中“标志位于第一行(L)”;将输出区域设为“$C$2”或者“$C$2:$C$33”(图3a)。 a
激光雷达在军事中的应用 摘要:本文简要介绍激光雷达的特点、激光雷达探测的基本物理原理及其在军事领域的应用现状.Laser rader’s character was briefly introduced in this essay.Besides,its elementary physical fundamental was also introduced as well al its use from military field. 关键词:激光雷达;探测;军事应用 1引言 激光雷达是现代激光技术与传统雷达技术相结合的产物,由发射机、天线、接收机、跟踪架及信息处理等部分组成。发射机是各种形式的激光器,如二氧化碳激光器、掺钕钇铝石榴石激光器半导体激光器及波长可调谐的固体激光器等;天线是光学望远镜;接收机采用各种形式的光电探测器,如光电倍增管、半导体光电二极管、雪崩光电二极管、红外和可见光多元探测器件等。激光雷达采用脉冲或连续波2种工作方式即为直接探测和外差探测。它像传统的微波雷达一样,由雷达向目标发射波束,然后接收目标反射回来的信号,并将其与发射信号对比,获得目标的距离、速度以及姿态等参数.但是它又不同于传统的微波雷达,它发射的不是微波束,而是激光束,使激光雷达具有不同于普通微波雷达的特点. 根据激光器的不同,激光雷达可工作在红外光谱、可见光谱和紫外光谱的波段上.相对于工作在米波至毫米波波段的微波雷达而言,激光雷达的工作波长短,是微波雷达的万分之一到千分之一,根据光学仪器的分辨率与波长成反比的原理,利用激光雷达可以获得极高的角分辨率和距离分辨率,通常角分辨率不低于0.1mrad ,距离分辨率可达0.1m , 利用多普勒效应可以获得10m / s 以内的速度分辨率.这些指标是一般微波雷达难以达到的,因此激光雷达可获得比微波雷达清晰得多的目标图像。 激光束的方向性好、能量集中,在20km 外,其光束也只有茶杯口大小,因而敌方难以截获,而且激光束的抗电磁干扰能力强,难以受到敌方有源干扰的影响. 由于各种地物回波影响,因而在低空存在微波雷达无法探测的盲区.而对于激光雷达,只有被激光照射的目标才能产生反射,不存在低空地物回波的影响,所以激光雷达的低空探测性能好.激光雷达体积小、重量轻,有的整套激光雷达系统的重量仅几十千克.例如为了适应海军陆战队的需要,美国桑迪亚国家实验室和伯恩斯公司都提出了手持激光雷达的设计方案.相对于重达数吨、乃至数十吨的微波雷达而言,激光雷达的机动性能显然要好得多. 任何事物都是一分为二的,激光雷达也有自身的缺陷.激光光束窄、方向性好,虽然表现出能量集中的优点,但不宜用作战场监视雷达搜索大空域.而且激光的传输受环境影响大,尤其是在雨、雪、雾的天气,激光在传输过程中的衰减更大.当然,激光在大气层外传输时不易衰减,有其得天独厚的优势.经过几十年的努力,科学家们趋利避害,已研制出多种类型的军用激光雷达.激光雷达在军事上可用于对各种飞行目标轨迹的测量。如对导弹对卫星的精密定轨等。激光雷达与红外、电视等光电设备相结合,组成地面、舰载和机载的火力控制系统对目标进行搜索、识别、跟踪和测量。由于激光雷达可以获取目标的三维图像及速度信息,有利于识别隐身目标。激光雷达可以对大气进行监测,遥测大气中的污染和毒剂,还可测量大气的温度、湿度、风速、能见度及云层高度。用激激光器作为辐射源的雷达。 2. 用干战场侦察的激光雷达 众所周知,普通的成像技术(如电视摄像、航空摄影及红外成像等)获得的场景图像都是反映被摄区域辐射强度几何分布的图像,而激光雷达可以通过采集方位角一俯冲角一距离一速度一强度等三维数据,再将这些数据以图像的形式显示出来,从而可产生极高分辨率的辐射强度几何图像、距离图像、速度图像等,因而它提供了普通成像技术所不能提供的信息. 例如美国桑迪亚国家实验库研制的一种激光雷达,激光器功率为120MW ,显示屏幕的像素为64
脉搏、语音 及图像信号的傅里叶分析 一、实验简介 任何波形的周期信号均可用傅里叶级数来表示。傅里叶级数的各项代表了不同频率的正弦或余弦信号,即任何波形的周期信号都可以看作是这些信号(谐波)的叠加。利用不同的方法,可以从周期信号中分解出它的各次谐波的幅值和相位。也可依据信号的傅里叶级数表达式,将各次谐波按表达式的要求叠加得到所期望的信号。 二、实验目的 1、了解常用周期信号的傅里叶级数表示。 2、了解周期脉搏信号、语音信号及图像信号的傅里叶分析过程 3、理解体会傅里叶分析的理论及现实意义 三、实验仪器 脉搏语音实验仪器,数字信号发生器,示波器 四、实验原理 1、周期信号傅里叶分析的数学基础 任意一个周期为T 的函数f(t)都可以表示为傅里叶级数: 00010000 1 ()(cos sin ) 21()() 1 ()cos()()1 ()sin()()n n n n n f t a a n t b n t a f t d t a f t n t d t b f t n t d t π π π ππ πωωωωπ ωωωπ ωωωπ ∞ =-- - =++=== ∑??? 其中0ω为角频率,称为基频,0a 为常数,n a 和n b 称为第n 次谐波的幅值。任何
周期性非简谐交变信号均可用上述傅里叶级数进行展开,即分解为一系列不同次谐波的叠加。 对于如图1所示的方波,一个周期内的函数表达式为: (0t<)2() (-t 0)2 h f t h ππ? ≤??=? ?-≤
C—31 工程名称:文锦丽都4#楼部位:筏板入模温度:24℃养护方法: 测温时间 大气 温度各测孔温度(℃)内外温差时间 间隔 裂缝 检查 月日时 1 2 3 4 5 6 7 8 9 10 表面内部 7 21 7:54 18℃57 61 59 62 60 58 39℃2h 无69 75 73 74 73 72 7 21 9:58 21℃69 72 69 70 71 68 44℃2h 无78 81 75 82 82 80 7 21 12:02 19℃56 67 62 70 68 58 42℃2h 无63 74 71 77 75 67 7 21 14:06 23℃58 63 64 70 64 59 42℃2h 无60 68 70 76 73 66 7 21 16:10 28℃63 57 57 68 59 57 44℃2h 无70 63 66 75 73 64 7 21 18:04: 26℃60 58 61 69 62 57 42℃2h 无68 65 67 77 69 65 7 21 20:00 24℃61 67 64 62 67 63 42℃2h 无67 72 69 70 73 71 7 21 22:05 20℃57 54 59 56 58 58 40℃2h 无62 63 68 64 65 66 7 21 23:58 18℃57 56 58 57 59 56 32℃2h 无62 63 65 63 65 62 7 22 2:00 13℃54 56 59 55 52 58 30℃ 2h 无61 61 67 64 60 63 7 22 4:05 14℃57 59 61 56 53 54 31℃ 2h 无66 67 68 64 60 61 7 22 6:10 15℃58 55 65 54 58 59 33℃ 2h 无64 62 70 65 67 66 7 22 8:07 19℃59 61 63 60 64 60 40℃ 2h 无72 71 73 71 74 72 7 22 10:10 24℃51 53 56 53 54 57 40℃ 2h 无60 62 63 62 63 66 施工单位:浙江中仑建设有限公司青海分公司监理单位:青岛商业建设监理有限公司青海分公司测温员:监理工程师:
激光雷达探测大气气溶胶研究进展 周军 (中国科学院大气成分与光学重点实验室,合肥市230031)摘要本文分析了米散射(Mie)激光雷达、拉曼(Raman)激光雷达、高光谱分辨激 光雷达(HSRL)及偏振(Polarization)激光雷达在大气气溶胶探测研究中的特点及其应用进展。随着激光技术、光学机械加工技术、信号探测与采集技术的发展和新的探 测原理与方法的涌现,大气气溶胶探测激光雷达取得了长足的技术进步。激光雷达由 单波长单功能向多波长多功能发展;由仅仅夜晚探测向白天夜晚连续探测发展;由需 要人工干预向着无人值守自动化运行发展;由实验室的研究设备型向商业化产品型转 化。对于大气气溶胶光学参数、微物理参数和气溶胶分类的探测研究,需要定量地获 取多波长大气气溶胶消光系数、后向散射系数及退偏振比等光学参数,如2α(355nm,532nm)+3β(355nm,532nm,1064nm)+2δ(355nm,532nm)等。为此,研制被称 之为Next generation aerosol lidar的多波长Raman/HSRL-Mie-Polarization激光雷达系统为激光雷达界所关注。为了适应区域性和全球气候与环境变化对大气气溶胶三维空间 分布和时间演变资料(4D)的需求,近些年来,先后建立了区域性的地基大气气溶胶激光雷达观测网(如EARLINET、AD-Net等)。国际气象组织(WMO)正在此基础上组建全球大气气溶胶激光雷达观测网,G AW A esosol LI dar O bservation N etwork (GALION)。同时,气溶胶激光雷达的支撑平台也由地基向机载(如国家航空遥感系统)和星载(如CALIPSO)方向发展。 关键词激光雷达、大气气溶胶、气溶胶观测网 1. 气溶胶激光雷达的功能 2008年10月世界气象组织(WMO)发布的GAW Report No.178《Plan for implementation of the GAW Aerosol Lidar Observation Network GALION》文件中明确地给出了各种类型的激光雷达探测大气气溶胶的功能[1],如表1所示。 表1.各种类型的激光雷达探测大气气溶胶(云)的功能。
傅里叶分析之掐死教程(完整版) 投递人itwriter发布于2014-06-07 10:50 评论(24)有34667人阅读原文链接[收藏]?? 作者:韩昊 知乎:Heinrich 微博:@花生油工人 知乎专栏:与时间无关的故事 谨以此文献给大连海事大学的吴楠老师,柳晓鸣老师,王新年老师以及张晶泊老师。 转载的同学请保留上面这句话,谢谢。如果还能保留文章来源就更感激不尽了。 ——更新于,想直接看更新的同学可以直接跳到第四章———— 我保证这篇文章和你以前看过的所有文章都不同,这是 12 年还在果壳的时候写的,但是当时没有来得及写完就出国了……于是拖了两年,嗯,我是拖延症患者…… 这篇文章的核心思想就是: 要让读者在不看任何数学公式的情况下理解傅里叶分析。 傅里叶分析不仅仅是一个数学工具,更是一种可以彻底颠覆一个人以前世界观的思维模式。但不幸的是,傅里叶分析的公式看起来太复杂了,所以很多大一新生上来就懵圈并从此
对它深恶痛绝。老实说,这么有意思的东西居然成了大学里的杀手课程,不得不归咎于编教材的人实在是太严肃了。(您把教材写得好玩一点会死吗会死吗)所以我一直想写一个有意思的文章来解释傅里叶分析,有可能的话高中生都能看懂的那种。所以,不管读到这里的您从事何种工作,我保证您都能看懂,并且一定将体会到通过傅里叶分析看到世界另一个样子时的快感。至于对于已经有一定基础的朋友,也希望不要看到会的地方就急忙往后翻,仔细读一定会有新的发现。 ————以上是定场诗———— 下面进入正题: 抱歉,还是要啰嗦一句:其实学习本来就不是易事,我写这篇文章的初衷也是希望大家学习起来更加轻松,充满乐趣。但是千万!千万不要把这篇文章收藏起来,或是存下地址,心里想着:以后有时间再看。这样的例子太多了,也许几年后你都没有再打开这个页面。无论如何,耐下心,读下去。这篇文章要比读课本要轻松、开心得多…… .本文无论是 cos 还是 sin,都统一用“正弦波”(Sine Wave)一词来代表简谐波。 一、什么是频域 从我们出生,我们看到的世界都以时间贯穿,股票的走势、人的身高、汽车的轨迹都会随着时间发生改变。这种以时间作为参照来观察动态世界的方法我们称其为时域分析。而我们也想当然的认为,世间万物都在随着时间不停的改变,并且永远不会静止下来。但如果我告诉你,用另一种方法来观察世界的话,你会发现世界是永恒不变的,你会不会觉得我疯了我没有疯,这个静止的世界就叫做频域。 先举一个公式上并非很恰当,但意义上再贴切不过的例子: 在你的理解中,一段音乐是什么呢 这是我们对音乐最普遍的理解,一个随着时间变化的震动。但我相信对于乐器小能手们来说,音乐更直观的理解是这样的:
激光雷达技术及其应用综述 一、激光雷达的概念 激光雷达(LIDAR-Light Detected And Ranging)是一套复杂的光机系统,它结合了光源、光电探测等技术,有时还包括计算机图象处理技术,能够同时获得方位、俯仰角度、距离、强度等信息,特别适合用于森林结构的估计、城市建设、工业、农业、航空航天等领域[1]。一个典型的激光雷达结构示意图,如图1所示。激光雷达是一种主动式遥感探测设备,从工作原理来说,它只是把传统微波雷达的光源变成了激光:向被测目标发射激光信号,然后接收反射回来的信号、并与发射信号进行比较,作适当处理后,就可获得目标的有关信息。 激光雷达不同于机器视觉技术,使用的是更为精确的激光光源和光电传感器,而机器视觉多是使用普通相机摄像头探测和CCD或CMOS作为图像传感器。激光雷达可以实现较大测量范围内的3D立体探测,但易受环境天气因素影响;使用微波(毫米波)雷达的机器视觉探测技术,立体测量范围有限、精度不高,但抗干扰性强、测量距离远。 图 1 典型激光雷达系统结构 二、激光雷达的关键技术 2. 1 光源技术 激光雷达系统中使用的光源,目前主要是CO2激光器,半导体激光器(LD)和以Nd:YAG 为主的固体激光器。 较远测程(数百米以上)的二极管激光成像雷达对其辐射源的要求, 一是具有足够高的输出功率, 二是具有足够窄的发射波束。目前商品化的二极管激光器虽可分别达到10W 的平均功率和衍射极限的波束质量, 但同一器件却难以同时满足这两项要求。一种可能的途径是采用面发射分布反馈(SEDFB)的二极管激光器阵列和微光学(MOC)准直技术。一个40 阵列, 采用微透镜组1.3cm ×10cm 孔径, 得到0.5 ~0.75mrad 发散度的10W 连续输出功率。当然, 为了实现这样的准直效果, 必须对微光学系统进行精心设计加工, 使其达到1μm 的绝对准直精度, 采用激光辅助化学腐蚀工艺制造微光学系统, 可以满足这一要求。在具体设计时, 必须对孔径尺寸, 波束发散度和输出功率进行合理的折衷[2]。 2. 2 传感器的选择 如果说激光源是激光雷达的“发射机”,那么光电探测器就是“接收机”。类似雷达系统的接收机,光电探测器可选择如光电倍增管、半导体光电二极管、雪崩光电二极管(APD)、红外和可见光多元探测器件等[3]。 从激光源发射的脉冲只有小部分光子到达了光电探测器的有源探测区域[4]。若大气衰减不会随着脉冲路径发生变化,则激光的光束发散角可忽略不计,照明点小于目标,入射角度
按照国标或者地方资料软件表格要求, 当施工大体积混凝土或冬季施工时必须进行测温。 温度控制指标及测温频率: 温度监控指标如下: 内外温差:小于25℃; 降温速度:小于1~2.0℃/d; 揭开保温层时的温差:小于15℃。 监测周期与频率如下: 混凝土浇筑初凝前:每0.5h 测一次; 混凝土浇筑结束后12h:每2h 测一次; 混凝土浇筑结束后24h:每4h 测一次; 混凝土浇筑结束后72h:每8h 测一次; 混凝土浇筑结束后15d:每24h 测一次; 当内外温差小于15℃时,停止测温。 如果同条件的混凝土测温不到600c°是很正常的,在60天送检就可以了 同条件养护试块不必作混凝土测温,在现场上如果对大体积混凝土作测温也不是用同条件试块的。进入养护室的就不是同条件养护了。 所以,同条件养护试块只记录混凝土构件附近的气象温度,而不记录混凝土试块本身的温度。 PART 1: 混凝土搅拌测温记录(C2—6—12) 冬季混凝土施工时,应进行搅拌测温(包括现场搅拌、商品混凝土)并记录。混凝土冬施搅拌测温记录包括大气温度、原材料温度、出罐温度、人模温度等。测温的具体要求应有书面技术交底,执行人必须按照规定操作。原始记录签字完毕后交资料员归档。“现场搅拌或商品混凝土”字样填人“备注”栏。表格中各温度值需标注正负号。 13.混凝土养护测温记录(表C2—6—13) (1)混凝土的冬期施工应符合国家现行标准《建筑工程冬期施工规程》 (JGJl04)和施工技术方案的规定。 (2)测温起止时间指室外日平均气温连续5d低于5~C时起,至室外日平均气温连续5d高于5~C冬施结束;掺加防冻剂的混凝土未达到抗冻临界强度(4MPa)之前每隔2h测量一次,达到抗冻临界强度(4MPa)且温度变化正常,测温间隔时间可由2h调整为6h。 (3)混凝土冬施养护测温应先绘制测温点布置图(标明具体部位名称),包括测温点的部位、深度等。测温记录应包括大气温度、各测温孔的实测温度、同一时间测得的各测温孔的平均温度和间隔时间等。此外还应进行成熟度计算(本次、累计)。表格中各温度值需标注正负号。 (4)关于测温的项目、测温次数和测温孔设置按要求执行现行有关标准规定。 14.大体积混凝土养护测温记录 大体积混凝土施工应对人模时大气温度、各测温孔温度、内外温差和裂缝进行检查和记录。大体积混凝土养护测温应附测温点布置图,包括测温点的布置部位、深度等。表格中各温度值需标注正负号。
第十七届全国科学计算与信息化会议暨智慧科研论坛 Contribution ID:13Type:not specified 大气能见度激光雷达数据采集系统 Tuesday,August18,201511:35AM(0:15) Content 大气能见度激光雷达数据采集系统 摘要:针对大气能见度激光雷达,本文设计了一套双通道高速数据采集系统。系统硬件基于FPGA设 计,支持在门控信号输入与激光雷达同步工作。通过硬件逻辑,可实现双通道数据的实时计数,并完 成多次数据的实时累加和数据存储。本系统通过USB2.0高速接口与计算机进行互联。上位机软件的 编写由Labwindows/CVI可视化虚拟仪器编写。此外该系统功耗低,成本低廉,探测距离大,可以满足 大气能见度激光雷达的数据采集需求。关键词:大气能见度;FPGA;数据采集;USB文章分类:3 硬件环境与基础设施 1.引言 相比于其他探测方式,激光雷达作为一种新型的大气探测工具,可以更加精确地反映大气对传 输于其中的激光的衰减作用,因此激光雷达在大气能见度探测方面有着重要应用。探测中要求 数据采集系统速度快,死时间小,针对这种需求,设计了一套专用的双通道数据采集系统。2. 能见度探测原理 大气能见度跟大气消光系数存在确定的数量关系。其中大气消光系数跟激光回波的强度存在关 系。因此激光雷达探测大气能见度时,首先发射一定波长的激光束,将回波转换为电信号进行 数据采集,从而得到回波功率随距离变化的曲线,进而进行大气消光系数的反演以及能见度计 算。 2.系统框架 双通道信号以及触发信号通过一个甄别器后,转换为标准TTL电平送入FPGA,门控信号触发 FPGA跟激光雷达同步工作,信号送入FPGA计数。比较器的阈值由FPGA通过DAC输出。FPGA与 上位机之间的通信是通过USB接口芯片实现的。 3.系统设计 FPGA是系统的核心,采用Altera公司的EP1C12Q240C8N芯片。FPGA内部主要由存储器,计数 器,锁存器以及控制逻辑组成。比较器的阈值由串行DAC输出。BIN宽度是通过计数器分频时钟 来实现的。为了提高信噪比,需要将数据多次累加以减少随机误差,而累加次数的设定是通过 设定触发次数比较器输入端来实现的。两个计数器进行乒乓计数,以减少计数死时间。一个计 数器记录一个BIN宽度的数据。下一个计数周期到来时,将上一次记录的数据Load进计数器里 进行累加。累加到一定次数时,上位机读取数据。USB芯片从总线上取走数据,等待上位机取 走数据。数据采集完毕后,采集完成的标志位置高,将RAM和读写地址产生器清零。 4.软件设计 USB接口芯片为Cypress公司的CY7C68013,其内部集成了一个可运行USB固件程序的8051增 强型内核。该程序实现命令和数据在上位机和下位机之间传送。上位机软件采用虚拟仪器技 术,使用Labwindows/CVI编写。界面简洁,功能齐全。 5.结论 整套系统可实现对数据的高速采集,工作稳定。系统探测距离为61.440千米,整机功率仅为 0.77瓦特,适用于低功耗场合,可以满足能见度激光雷达的数据采集要求。 Summary Primary author(s):Mr.孙,荣奇(核探测与核电子学国家重点实验室) Co-author(s):Mr.刘,宇哲(核探测与核电子学国家重点实验室);Mr.路,后兵(核探测与核电子学国家重点实验室);Prof.金,革(核探测与核电子学国家重点实验室) Presenter(s):Mr.孙,荣奇(核探测与核电子学国家重点实验室) Session Classi?cation:电子学与数据获取(I)