第6章 ADAMS模型语言及仿真控制语言
本章对ADAMS的模型语言及仿真控制语言进行了简介。通过本章的学习可以掌握ADAMS/Solver模型语言adm文件、ADAMS/Solver仿真控制语言acf文件的语法、结构,对一些关键语句进行深入的说明,通过学习可以深刻理解ADAMS中几何、约束、力元等的实质,可以脱离ADAMS/View环境直接利用ADAMS/Solver进行一些高级应用,并为进一步的ADAMS二次开发打下基础。
6.1ADAMS的主要文件介绍
ADAMS中关于模型及分析主要有以下几种类型文件:ADAMS/View二进制数据库bin 文件、ADAMS/View命令cmd文件、ADAMS/Solver模型语言adm文件、ADAMS/Solver 仿真控制语言acf文件,以及ADAMS/Solver仿真分析结果文件:req文件、res文件、gra 文件、out文件、msg文件。
ADAMS/View二进制数据库bin文件以“.bin”为文件名后缀,文件中记录了从ADAMS 启动后到存储为bin文件时的全部信息-包含模型的完整拓扑结构信息、模型仿真信息以及后处理信息。可以包含多个模型、多个分析工况和结果。可以保存ADAMS/View的各种设置信息。文件为二进制不能阅读、编辑,只能通过ADAMS/View调阅,由于信息全面一般文件都比较大。
ADAMS/View命令cmd文件以“.cmd”为文件名后缀,是由ADAMS/View命令编写的模型文件,可以包含模型的完整拓扑结构信息(包括所有几何信息)、模型仿真信息,为文本文件,可读性强,可以进行编程,是ADAMS的二次开发语言,不包含ADAMS/View 的环境设置信息,不包含仿真结果信息,只能包含单个模型。
ADAMS/Solver模型语言(ADAMS Data Language)adm文件,以“.adm”为文件名后缀,文件中包含模型中拓扑结构信息,但有些几何形体如link等不能保留。ADAMS/View 的环境设置不能保留。ADAMS/Solver可以读取adm文件,与ADAMS/Solver仿真控制语言acf文件配合可以直接利用ADAMS/Solver进行求解。
ADAMS/Solver仿真控制语言acf文件,以“.acf”为文件名后缀,文件中可以包含ADAMS/Solver命令对模型进行修改和控制的命令,从而控制仿真的进行。
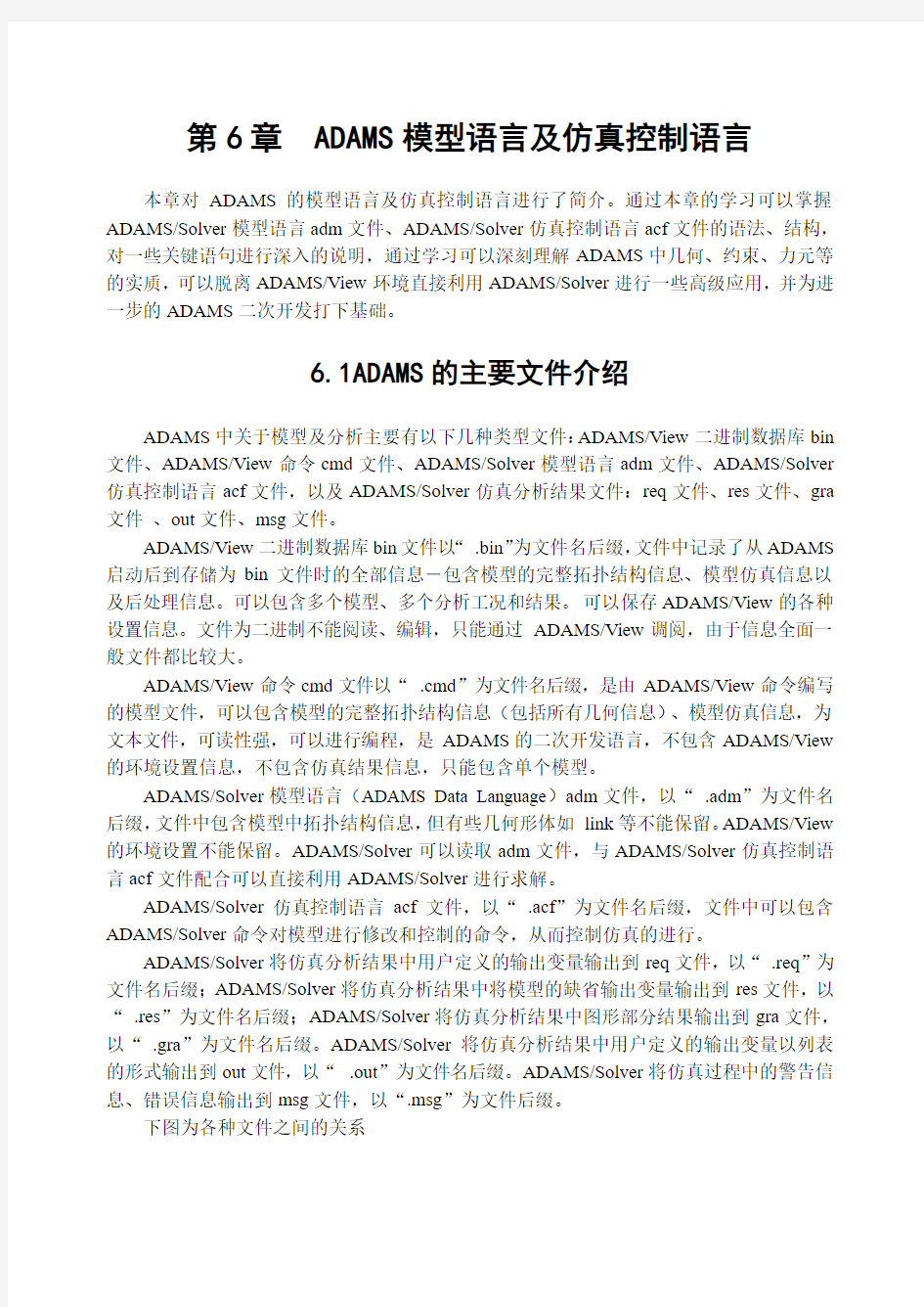
ADAMS/Solver将仿真分析结果中用户定义的输出变量输出到req文件,以“.req”为文件名后缀;ADAMS/Solver将仿真分析结果中将模型的缺省输出变量输出到res文件,以“.res”为文件名后缀;ADAMS/Solver将仿真分析结果中图形部分结果输出到gra文件,以“.gra”为文件名后缀。ADAMS/Solver将仿真分析结果中用户定义的输出变量以列表的形式输出到out文件,以“.out”为文件名后缀。ADAMS/Solver将仿真过程中的警告信息、错误信息输出到msg文件,以“.msg”为文件后缀。
下图为各种文件之间的关系
机械系统动力学分析及ADAMS应用
图6-1ADAMS各文件间的关系
6.2ADAMS/Solver模型语言(ADAMS DATA Language)adm
6.2.1 ADAMS/Solver模型语言分类及其语法介绍
ADAMS/Solver模型语言可以定义系统的拓扑结构,确定系统的输出,定义仿真分析参数等。
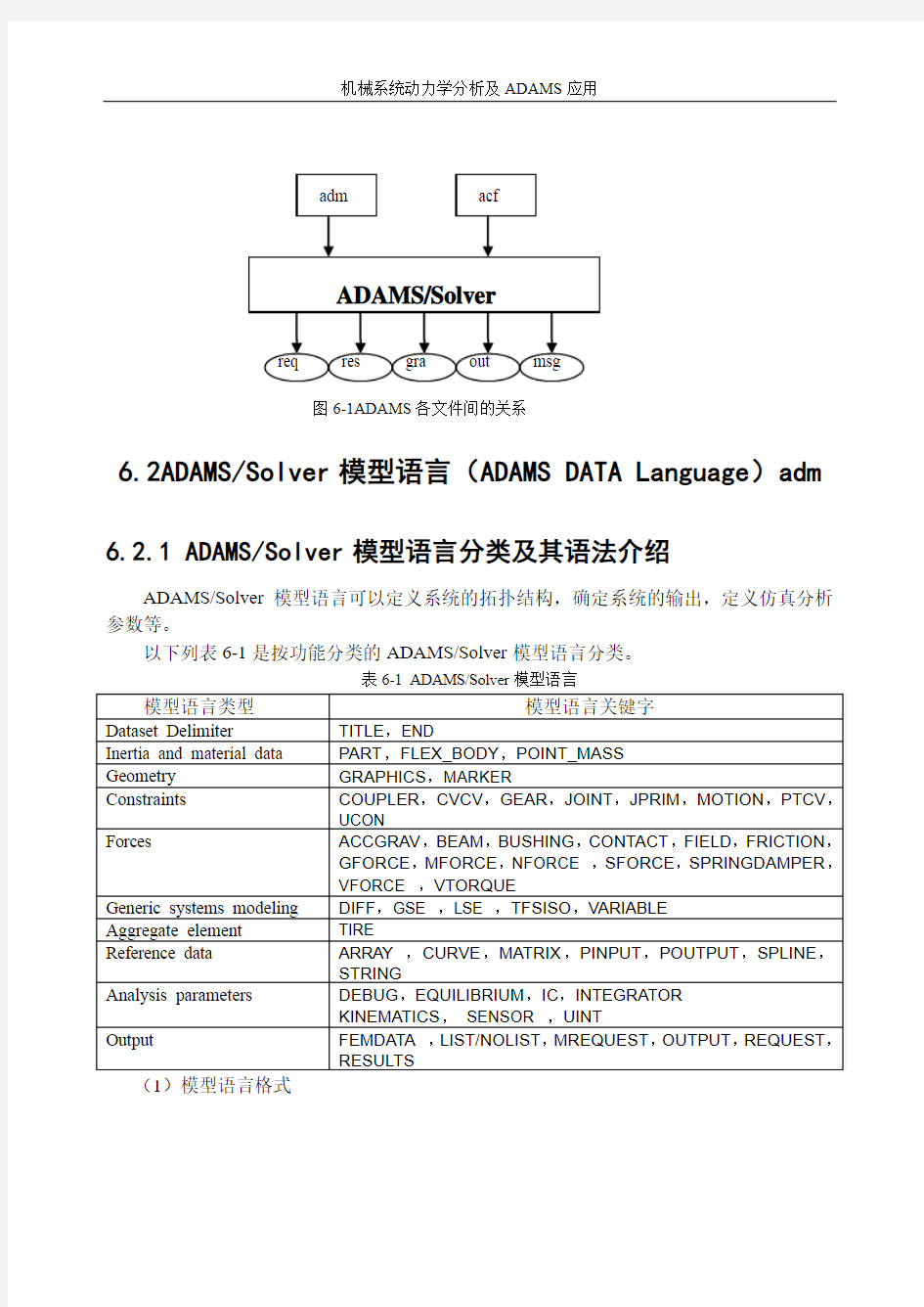
以下列表6-1是按功能分类的ADAMS/Solver模型语言分类。
表6-1 ADAMS/Solver模型语言
(1)模型语言格式
第6章 ADAMS 模型语言及仿真控制语言
1,...,1,...,/[,]1(1,...),...(1,...)v vn v vn NAME id ARG c v vn ARGn c v vn e e ????????????????==???????????????????
?????
ADAMS/Solver 模型语言的格式如上,一般必包括“/”、id 号以及一个或多个变量表达
式。现以MARKER 语句说明。
[],,,,,,,,,/,,,_,,,,QP x y z REULER a b c QP x y z PART id MARKER id ZP x y z POINT MASS id XP x y z USEXP FLOATING ?????=???????????=????????????????=????=??????????=??????????=????????=??????????????????????????
其中{}表示三项中必须选择一种参数,[ ]表示可以任选两种中一种参数,[[ ]]表示一种参
数组合。因此在ADAMS/Solver 模型语言定义中可以定义如下:
MARKER/201,PART=4,QP=100,100,100,REULER=90D,0D,0D
MARKER/202,PART=4,QP=100,100,100,ZP=100,100,105,XP=100,105,100
MARKER/203,PART=4,FLOATING
(2)变量表达式
其中变量表达式分为以下几类:可以根据类别不同选择不同的变量名、变量可以由一
系列数值赋值、变量由一系列字符串赋值、变量由表达式赋值。
1.根据类别不同选择不同的关键词
如上面MARKER 第三种定义,其中FLOATING 为关键词,不需赋值。又如
SFORCE/10, I=8, J=9,TRANSLATION,FUNCTION=100 * DM(8, 9) * * (-1.3) - 200
其中TRANSLATION 是可以在TRANSLATION 和RORTATION 两个关键词选择一个,不需赋值。
2.变量可以由一系列数值赋值
如上面MARKER 中QP=100,100,100
3.变量由一系列字符串赋值
如积分算法说明定义:
INTEGRATOR/GSTIFF, PA TTERN = T:F:F:F:T:F:F:F:T:T, HMIN = 1.0E-005, KMAX = 3,
INTERPOLATE = ON, CORRECTOR = MODIFIED
其中PATTERN = T:F:F:F:T:F:F:F:T:T 由一系列字符串赋值
4.变量由表达式赋值
如MOTION/1, JOINT=1, FUNCTION=POL Y(TIME,0,0,360D)
MOTION/2, JOINT=2, FUNCTION=USER(0, 0, 6.28)
机械系统动力学分析及ADAMS应用
其中FUNCTION=POL Y(TIME,0,0,360D) 为函数表达式,FUNCTION=USER(0, 0, 6.28)为用户子程序表达式。
(3)模型语言中的特殊约定
1.关于角度:模型语言中角度缺省单位为弧度,如需度则需在数字后加D。
如:RELUER=90D,0D,90D,在out文件中角度缺省单位为弧度,可以通过OUTPUT 语句中设置DSCALE变为度。
2.关于变量:可以任意颠倒变量的先后次序;变量名可以利用缩写;变量可以大写,也可以小写;如果没有提供变量并赋值,ADAMS/Solver认为变量被赋缺省值。不要将实型赋给整型变量。
3.空格与制表符:一个变量中连续出现5个空格或更多的空格,ADAMS/Solver认为空格后无效,但TITLE和函数表达式除外。
4.说明语句:感叹号后为说明,说明语句可以在任何位置。
5.续行:第一例为“,”表示该行为续行,或行尾为“&”表示下行为续行。如下所示:
PART/2, MASS = 2.3,CM = 5, IP = 183.005,&17310.260, 17418.946
6.隔符:同一语句中变量间的分隔符使用“/”,“=”,“,”,“\”,“;”,其中“;”表示可以在一行写两个语句。
7.id号:用于同一系统存在多个相同拓扑结构类型定义,如:
MARKER/201,PART=4,QP=100,100,100,REULER=90D,0D,0D
MARKER/202,PART=4,QP=100,100,100,ZP=100,100,105,XP=100,105,100
其中201、202为id号,以区分同一语句MARKER。
8.语句:一个语句必须在前5例开始,否则ADAMS/Solver认为该行为注释行;语句必须在1-80例之间,可以续行。
6.2.2模型文件的开头与结尾
(1)TITLE
位于adm模型文件的第一行,为一串字符,如:
This is The Truck Simulation Model 2003/10
(2)END
位于adm模型文件的最后一行。
TITLE 与END之间的语句构成ADAMS/Slover的主题,语句顺序可以变化。
6.2.3惯性单元
惯性单元包含三种惯性单元PART,FLEX_BODY,POINT_MASS,这里仅对PART简要介绍,FLEX_BODY,POINT_MASS可以有关ADAMS参考手册。
PART:PART语句确定刚体的质量、惯量信息、质心位置、初始位置、方位、初始速度。
PART语句有两种:
PART/id,GROUND。表明该PART被定义为地面。
第6章 ADAMS 模型语言及仿真控制语言
,
[][]/,[,] [,] [,]
[,,, [,,,]][,_]
,,,,,,,,,,,,,,,,,,,PART id MASS r CM r IM r IP xx yy zz xy xz yz MATERIAL mat name VX x VY y QG x y z REULER a b c VZ z WX a QG x y z ZG x y z XG x y z WY b WZ c ======????=????????==??=??????????=??===????????????=?=???[,][,][,1:2:3:4:5:6]
VM id WM id EXACT c c c c c c ???????????????????????
?=== ● MASS 为PART 的质量;
● CM 为质心坐标系id 号;
● IM 为惯量坐标系id 号;
● IP 为PART 的相对于IM 惯量坐标系的惯量,没有IM 时为相对于CM 质心坐标系
的惯量;
● MATERIAL 为PART 的材料特性;
● QG 为PART 局部坐标系圆点;REULER 为PART 局部坐标系相对于地面坐标系的
三个欧拉角;
● QG 为PART 局部坐标系圆点;ZG 为PART 局部坐标系的Z 轴方向上一点,XG 为
PART 局部坐标系的XOZ 平面上任一点;
● VX 、VY 、VZ 、为PART 质心处初始速度在VM 坐标系的三个投影分量;
● WX 、WY 、WZ 为PART 初始角速度在WM 坐标系的三个投影分量;
● VM 为定义初始速度的坐标系,缺省为地面坐标系;
● WM 为定义初角始速度的坐标系,缺省为CM 坐标系;
● EXACT 为PART 的质心坐标系相对于局部坐标系的六个坐标中的精确输入值,在
初始装配中保持不变,关键字为X ,Y ,Z ,PSI ,THETA ,PHI ,其顺序可以任意。
举例如下:
PART/2, QG = 0, 0, 10, REULER =90D ,30D ,45D
, MASS = 1.40, CM = 3, IP = 145.2, 13716.1, 13802.2, VX = 10
, VY = 10, VZ = 0, WX = 0D, WY = 0D, WZ = 10D, EXACT = X:Y:PSI
上面语句表明,该PART id 号为2,该PART 局部坐标系圆点在地面坐标系中的位置为0,
0,10;PART 局部坐标系相对于地面坐标的欧拉角为90D ,30D ,45D ;质量为1.40;质心坐标系标号为3;相对于质心坐标系的惯量为145.2, 13716.1, 13802.2,0,0,0;质心处初始速度(在地面坐标系分解)为10,10,0;初始角速度为在质心坐标系分解为0D/sec, 0D/sec, 10D/sec,其中质心坐标x ,y 及在PART 局部坐标系中的第一个欧拉角在初始装配中保持不变(或优先保持不变)。
机械系统动力学分析及ADAMS 应用
6.2.4几何单元
几何单元包含GRAPHICS ,MARKER 两种几何单元,这里分别对GRAPHICS ,
MARKER 语句进行介绍。
GRAPHICS :GRAPHICS 语句用于确定接触碰撞或表达图形,可以分两类分别定义接
触的、定义几何图形的。这里介绍用于定义接触的GRAPHICS 语句。
用于接触的GRAPHICS 语句如下:
, ARC, CM id, RADIUS r, RANGLE r , BOX, CORNER id, X x, Y y, Z z , CIRCLE, CM id, RADIUS r , CURVE, CID id, CRM id , CYLINDER, CM id, RADIUS r, LENGTH r,RANGLE r GRAPHICS/id , ===============FRUSTUM, CM id, RADIUS r, LENGTH r, TOP r,BOTTOM r, [RANGLE r], POINT, RM id , PLANE, RM id, XMIN r, XMAX r, YMIN r, YMAX r , ELLIPSOID, CM id, XSCALE r, YSCALE r, ZSCALE r ================, EXTERNAL, RM id, {File file_name, [ELEMENT geometry_name]}????????????????????????????????????==??=????
● ARC :创建一个圆弧,由三个参数表达圆弧:
CM 为圆弧的圆心坐标系的id 号;RADIUS 为圆弧的半径值;RANGLE 为圆弧的角度,
要注意,CM 坐标系的x 轴为圆弧的始点。
举例如下:
MARKER/2, PART = 3, QP = -450, -50, 0, REULER = 1.565051177D, 0D, 0D
GRAPHICS/2, ARC, CM = 2, RANGLE = 170D, RADIUS = 158.0
表明在MARKER (id =2)处作一个半径为158.0的圆弧,范围为170D 。
● BOX :创建一个矩形体,由4个参数表达长方体:
CORNER 为该长方体一个角处的坐标系的id 号;X ,Y 和Z 是长方体沿着上面坐标系
x ,y 和z 轴三个方向的长度。
● CIRCLE :创建一个圆,由2个参数表达圆:
CM 为圆心处坐标系的id 号;RADIUS 为圆的半径。
● CURVE :创建基于数据单元CURVE 语句的曲线图形。
CID 为所需创建CURVE 的id 号;CRM 为定义曲线的参考坐标系的id 号。CONTACT 。
和CVCV 语句需要的曲线为平面曲线,且该平面必须为包含RM 标记点的x,y 轴的平面。
● CYLINDER:创建一个顶面和底面都垂直于中心轴线的圆柱体,由4个参数表达。
CM 为圆柱底面处圆心坐标系的id 号,CM 坐标系的z 轴方向为圆柱体的中心线;
RADIUS 为圆柱体半径;RANGLE 为圆柱体圆弧的角度,且总是以CM 坐标系的x 轴
为起始点;LENGTH 为圆柱体的高度。
第6章 ADAMS 模型语言及仿真控制语言
举例如下:
GRAPHICS/6, CYLINDER, CM = 5, RANGLE = 160D, LENGTH = -200, RADIUS = 500 ● ELLIPSOID :创建一个椭圆,由4个参数表达。
CM 为椭圆的圆心坐标系的id 号。XSCALE ,YSCALE 和ZSCALE 为沿着CM 坐标系的x ,y 和z 轴的直径,如果三个值都相等,那就会创建一个球。
● FRUSTRUM:创建一个顶面和底面都垂直于中心轴线的锥体,由4个参数表达。 CM 为锥体底面的圆心坐标系id 号,CM 坐标系的z 轴为锥体的中心轴线;TOP 和BOTTOM 分别为锥体的上、下圆平面半径;RANGLE 为锥体的旋转角度,且总是以CM 坐标系x 轴为起始点;LENGTH 为锥体的高度。
举例如下:
GRAPHICS/10, FRUSTUM, CM = 5, RANGLE = 260D, LENGTH = 400
, SIDES = 20, TOP = 500, BOTTOM = 1000
● PLANE :创建一个有限平面,由5个参数表达。
RM 为该平面的参考坐标系id 号,该平面位于RM 坐标系的x-y 平面内(也就是说RM 坐标系的z 轴垂直于该平面;XMIN ,XMAX ,YMIN 和YMAX 为该平面在RM 坐标系的x-y 平面内的范围。平面为二维的,可以定义与其他单元(点,圆弧,圆和曲线以及球)接触碰撞。
● EXTERNAL :创建ADAMS/Solver 可以识别的Parasolid 图形,用于接触碰撞。 例如:
GRAPHICS/19, EXTERNAL, RM=100, FILE = test.xmt_txt,ELEMENT = part1
该GRAPHICS 语句创建一个三维实体。该实体的数据包含在Parasolid 的文件testl.Xmt_txt 中。该文件中包含了几个几何实体,其中一个名为Part1。该实体以坐标系100为参考坐标系。
MARKER :该语句在空间定义了一个几何点和以该点引伸出的三个相互垂直的坐标轴。它的描叙形式如下所示:
,,,,,,,,,,/, ,,,_, ,, [,],QP x y z REULER a b c QP x y z PART id MARKER id ZP x y z POINT MASS id XP x y z USEXP FLOATING ?????=???????????=?????????????=???????=??????????=??????????=????????=??????????????????????????
,,,/ [,_],___,,,qp x y z MARKER id FLEX BODY id NODE ID fem node id REULER a b c ?=???==????=????
MARKER 必须从属于PART 、POINT_MASS 、FLEX_BODY 三种惯性单元之一。特性上存与惯性单元固定或浮动。MARKER 作为坐标系需要一个点定义其圆点,关于其方向
机械系统动力学分析及ADAMS 应用
有三种定义方法。
举例说明:
MARKER/6, PART=4,QP=0,1,0, REULER=90D,45D,100D
MARKER/7, PART=4,QP=0,1,0, ZP =0,1,10,XP =0,10,10
MARKER/8, PART=4,QP=0,1,0, ZP =0,1,10,XP =0,10,10,USEXP
MARKER/9, PART=4,FLOTING
以上4个坐标系中6、7、8为与PART 4固定的坐标系,9为属于PART 4但为浮动坐标系,浮动坐标系在ADAMS/Solver 中的VTORQUE ,VFORCE , GFORCE , CVCV , and PTCV 中需要。
坐标系6利用欧拉角定义该坐标系相对于PART 4的物体局部坐标系;
坐标系7利用ZP 表达坐标系的z 轴(QP 指向ZP ),XP 为坐标系XOZ 平面上一点,但不能与QP 、ZP 共线;ADAMS/Solver 自动确定其x 轴。
坐标系8利用XP 表达坐标系的x 轴(QP 指向XP ),ZP 为坐标系XOZ 平面上一点,但不能与QP 、XP 共线,ADAMS/Solver 自动确定z 轴,这种用法必须使用USEXP 关键字。
又如柔体上坐标系:
MARKER/12, FLEX_BODY=5,NODE_ID=40,REULER=90D,30D,45D
MARKER/13, FLEX_BODY=5,QP=100,100,0,REULER=90D,30D,45D
坐标系12位于FLEX_BODY 5上节点40处,利用欧拉角定义该坐标系相对于
FLEX_BODY 5的物体局部坐标系;
坐标系13位于FLEX_BODY 5上,相对于FLEX_BODY 5的物体局部坐标系的位置为100,100,0,利用欧拉角定义该坐标系相对于FLEX_BODY 5的物体局部坐标系;
ADAMS/Solver 自动确定并调整其到相近节点处。
6.2.5约束单元
约束单元包括COUPLER ,CVCV ,GEAR ,JOINT ,JPRIM ,MOTION ,PTCV , UCON 单元,这里分别对COUPLER ,JOINT 语句进行介绍,其它单元参考手册。
COUPLER 语句:COUPLER 语句将两个或者三个移动副或者转动副关联。其描叙如下:
/, 1, 2[,3]
,[1,]2[,3], ::,(1,...,30)COUPLER id JOINTS id id id T T T SCALES r r r TYPE R R R FUNCTION USER r r =??????????=????=??????????????=????????????????????
其中存在关系式:
r1*q1+r2*q2+r3*q3=0
q2/q3=r2/r3
举例说明如下:
JOINT/1, CYLINDRICAL, I = 3, J = 4
JOINT/2, REVOLUTE, I = 7, J = 8
JOINT/3, TRANSLATIONAL, I = 10, J = 11
COUPLER/1, JOINTS = 3, 2, 1, TYPE = T:R:T, SCALES = 90D, 2, -90D
第6章 ADAMS 模型语言及仿真控制语言
该COUPLER 语句将Joint 3的平动连接到Joint 2的转动上、Joint 1的平动上。铰链间位移关系为:(90D/180*3.14)*q1 +2*q2+(-90D/180*3.14)*q3 = 0。
同时满足q2/q3=2/(-90D/180*3.14)。
关系式中角度变量需换算为弧度。
JOINT 语句:JOINT 语句确定物体(刚体和柔性体)间的运动学约束。JOINT 的类型有:等速铰(constant-velocity), 圆柱铰(cylindrical),固定铰(fixed),虎克铰 (Hooke), 平面铰
(planar),齿轮齿条铰 (rack-and-pinion),转动铰 (revolute), 螺纹铰(screw), 球铰 (spherical),移动铰(translational), 和广义万向节铰(universal joints).
其格式如下:
,1,2 , 1,2/, , ,, [,1,2],,[1,2]CONVEL CYLINDRICAL ICTRAN r r FIXED ICROT r r HOOKE PLANAR JOINT id I id J id RACKPIN PD r REVOLUTE IC r r SCREW PITCH r SPHERICAL TRANSLATIONAL IC r r UNIVERSAL ??=???????=??????======???????????????????????????????????????
J OINT 利用I 、 J MARKER 来定义运动学铰链约束。下面对各种运动学约束的要求作介绍。
● CONVEL
该铰链定义两个 PART 具有相同转动速度, I 、J MARKER 的坐标必须相同且I 、J MARKER 的Z 轴是两个 PART 的转动轴,I MARKER Z 轴方向背离J MARKER ,J MARKER Z 轴方向背离I MARKER ,同时,I MARKER X 轴方向需与J MARKER X 轴方向平行。产生4个约束方程。
● CYLINDRICAL
该铰链定义两个 PART 可以沿着I 、J MARKER 的Z 轴平动和转动。定义要求I 、J
MARKER 的坐标必须相同,其Z 轴需同向并重合。产生4个约束方程。
● FIXED
该铰链定义两个 PART 固接,要求I 和J MARKER 坐标圆点重合。产生个6约束方程。 ● HOOKE
该铰链定义两个PART 可以分别沿自己的I MARKER 的x 轴、JMARKER 的y 轴转动。定义要求I MARKER 的X 轴垂直于J MARKER 的Y 轴,从而形成十字叉,I MARKER 的Z 轴、J MARKER 的Z 轴分别为其转轴方向,I 和J MARKER 的原点重合,在十字的中心。HOOKE 与UNIVERSAL 的功能相同,但两者之间MARKER 的定义方式不同。产生4个约束方程。
机械系统动力学分析及ADAMS 应用
● PLANAR
该铰链定义一个PART 的一个平面可以相对于第二个PART 的一个平面相对滑动。定义要求I MARKER 和J MARKER 的Z 轴平行,XOY 平面重合。产生3个约束方程。
● RACKPIN
该铰链定义一个PART 的的一个转动自由度与另一个PART 的移动自由度相关。定义要求I MARKER 的Z 轴为其转动轴向,J MARKER 的Z 轴为其移动轴向,PD 应为I MARKER 的Z 轴到J MARKER 的Z 轴距离的两倍,产生一个约束方程,完全可以由COUPLER 代替。
● REVOLUTE
该铰链定义一个PART 可以相对于第二个PART 以一确定轴线转动。定义要求I
MARKER 和J MARKER 的坐标圆点以及Z 轴重合,Z 轴为其相对转动轴。产生5个约束方程。
● SCREW
该铰链定义一个PART 可以相对于第二个PART 以一确定轴线转动并同时沿着该轴线移动,只不过转动与移动存在一定的关系,即每转一圈产生一个螺距(PITCH )的移动。定义要求I MARKER 和J MARKER 的Z 轴共线。产生一个约束方程。
● SPHERICAL
该铰链定义一个PART 可以相对于第二个PART 自由转动。定义要求I MARKER 和J MARKER 的坐标圆点重合,产生3个约束方程。
● TRANSLATIONAL
该铰链定义一个PART 可以相对于第二个PART 沿着一轴线移动,不能转动。定义要求I MARKER 和J MARKER 的Z 轴共线。产生5个约束方程。
● UNIVERSAL
该铰链定义两个PART 可以分别沿自己的I MARKER 的Z 轴、JMARKER 的Z 轴转动。定义要求I MARKER 的Z 轴垂直于J MARKER 的Z 轴,从而形成十字叉, I 和J MARKER 的原点重合,在十字的中心。UNIVERSAL 与HOOKE 的功能相同,但两者之间MARKER 的定义方式不同。产生4个约束方程。
6.2.6力元
力元包括ACCG RA V ,BEAM ,BUSHING ,CONTACT ,FIELD ,FRICTION ,GFORCE ,MFORCE ,NFORCE ,SFORCE ,SPRINGDAMPER ,VFORCE ,VTORQUE 单元,这里分别对BEAM ,FIELD 语句进行介绍,其它单元参考手册。
BEAM :ADAMS 中可以使用无质量的等截面梁来定义两个PART 之间的作用力。ADAMS/Solver 根据输入梁的物理特性,按照铁木辛柯梁理论求解梁中的各种力。
其语句格式如下:
/, , , , , , , [,] [,], , 1,...,21,BEAM id I id J id LENGTH r IXX r IYY r IZZ r AREA r ASY r ASZ r EMODULUS r GMODULUS r
CMATRIX r r CRATIO r ===========???=?????=??????
利用I MARKER 、J MARKER 定义一个无质量梁,其中 J MARKER 的 X 轴为梁的轴
第6章 ADAMS 模型语言及仿真控制语言
向。I MARKER 在梁无变形时应在J MARKER 的 X 轴上,并且I MARKER 、J MARKER 的坐标系平行。其它参数如下:
● LENGTH 为梁沿着J MARKER 的 X 轴的非变形长度。
● IXX 为沿J MARKER 的 X 轴极惯性矩。
● IYY 、IZZ 分别为沿着梁的横截面的中心轴(y-y 和z-z )的惯性矩。
● AREA 为梁的横截面积。梁的中性轴一定垂直通过该横截面。
● ASY 为铁木辛柯梁的y 方向的剪切修正因子。
● ASZ 为铁木辛柯梁的z 方向的剪切修正因子。
● EMODULUS 为铁木辛柯梁的弹性杨氏模量。
● GMODULUS 为铁木辛柯梁的弹性剪切模量。
● CMA TRIX=r1,...,r21,为梁的结构阻尼矩阵元素,矩阵是对称的,只需要指明一半
的数据。输入矩阵的值如下式:
????????
??????????r21 r20 r18 r15 r11 r06r19 r17 r14 r10 r05r16 r13 r09 r04r12 r08 r03r07 r02r01
● CRATIO 为铁木辛柯梁结构阻尼矩阵与刚度矩阵的比率,缺省为零。
在梁的两个端点之间,作用有线性的拉伸、弯曲和扭转力矩,梁中各种力的计算公式如下式:
11112131415161222621
223242526233353132334353634441425355626600000000000000
000000000000x y z x y z F K C C C C C C x L F K K C C C C C C y F K K C C C C C C z K C C C T a K K b T K K c T ??-????????????????????????=--??????????????????????????????????
43445464515253545565616263646566x y z x y z V V V C C C C C C C C C C C C C C C ωωω????????????????????????????????????????
式中,,F T 分别为力和力矩; ,,,,,,,,,,,x y z x y Z
X Y Z a b c V V V ωωω分别表示,I J MARKER 之间的相对位移、转角、
速度、角速度;
机械系统动力学分析及ADAMS 应用
,K C 分别表示刚度系数和阻尼系数;
L 为梁,I J MARKER 之间的距离(梁的长度);
举例如下:
BEAM/2, I=10, J=20, LENGTH=100
, IXX=1000, IYY=500, IZZ=500, AREA=25.0
, ASY=1.11, ASZ=1.11, EMOD=28E6, GMOD=10.6E6,
, CRATIO=0.0001
FIELD :该语句定义,I J MARKER 之间的平动和转动的作用力和反作用力。语句格式如下:
, , 1,...,36, 1,...,36, 1,...,6, 1,...,6/, , , ( 1[,..., 30])
[\ 1,...,6]C R A T I O r C M A T R I X r r K M A T R I X r r F O R C E r r L E N G T H r r F I E L D i d I
i d J i d F U N C T I O N U S E R r r L E N G T H r r ??????=???????=??????????=??????=??????=????===?=???????????????????????????????????? ● CRATIO 为CMATRIX 相对于KMATRIX 的比率。如果输入CRATIO ,ADAMS/Solver
通过CRATIO 乘KMATRIX 获得CMA TRIX 。缺省值为零。
● CMA TRIX 为一个6*6的阻尼系数。其格式如下式:
?????????
???????????r36 r30 r24 r18 r12 r6r35 r29 r23 r17 r11 r5r34 r28 r22 r16 r10 r4r33 r27 r21 r15 r9 r3r32 r26 r20 r14 r8 r2r31 r25 r19 r13 r7 r1 ● KMATRIX 为一个6*6的刚度系数矩阵。其格式如下:
第6章 ADAMS 模型语言及仿真控制语言
?????????
???????????r36 r30 r24 r18 r12 r6r35 r29 r23 r17 r11 r5r34 r28 r22 r16 r10 r4r33 r27 r21 r15 r9 r3r32 r26 r20 r14 r8 r2r31 r25 r19 r13 r7 r1 ● FORCE 为对应于,I J MARKER 之间3个移动和3个转动的预载荷。
● LENGTH 为,I J MARKER 之间6个自由状态下的初始位移。
● FUNCTION 为利用用户子程序FIESUB 来定义一个非线性力场。
● FIELD 的力与力矩关系如下式:
0111213141516021
22232425260313233343536414243444546051
525354555606162636465660x y z x y z F x x K K K K K K F y y K K K K K K z z F K K K K K K K K K K K K T a a K K K K K K T b b K K K K K K c c T ??-??????????-???????????-??=-???-??????????-???????-?????????111213141516122122324252623313233435363414243445464151525354556526162636465663x y z x y z V F C C C C C C V F C C C C C C F V C C C C C C C C C C C C T C C C C C C T C C C C C C T ωωω???????????????????????????-+???????????????????????????????????????
FIELD 的计算公式同BUSHING 的计算公式相似,不同之处是FIELD 计算公式中刚度和阻尼系数ij K 和ij C (i j ≠)不为零。同时,考虑初始位移,,X Y Z 和转角,,a b c 。FIELD 提供了定义最一般的力的方法,因此也可以利用FIELD 来定义一般情况下的梁,例如可以定义变截面的梁或者是使用非线性材料的梁。
举例如下:
FIELD/1, I=100, J=57, KMA TRIX=0.198E+04
, 0, 0.126E-01, 0, -0.147E+04, 0,
, 0, 0, 0, 0, 0, 0,
, 0.126E-01, 0, 0.208E+03, 0, -0.933E-02, 0,
, 0, 0, 0, 0, 0, 0,
,-0.147E+04, 0, -0.933E-02, 0, 0.763E+07, 0,
, 0, 0, 0, 0, 0, 0
, LENGTH=0, 150, 0, 0, 0, 0
6.2.7系统模型单元
系统单元包括DIFF ,GSE ,LSE ,TFSISO ,V ARIABLE ,这里分别对DIFF ,VARIABLE
机械系统动力学分析及ADAMS 应用
语句进行介绍。
DIFF :DIFF 语句用于创建一个用户自定义的状态变量,利用一阶微分方程来表达该变量。其格式如下:
/ 1 [,2][,_], [\]
(1[,...,30])e DIFF id IC r r STATIC HOLD FUNCTION IMPLICIT USER r r ??==???
?
● IC 当输入表达式为变量的显式时,为定义变量的初始值;如果输入表达式是一个隐
函数表达式,为定义变量的初始值及导数的近似值。如果提供的是一个显函数,就不用提供变量的导数的初值,因为ADAMS/Solver 可以从方程中直接计算出变量的导数。
● STA TIC_HOLD 指在静态分析和准静态分析中变量的值不允许改变。
● IMPLICIT 指函数表达式或者DIFSUB 子程序定义为隐式微分方程。如果没有指明为
IMPLICIT 的情况下,ADAMS/Solver 就会假定表达式或者DIFSUB 为显式方程。
● FUNCTION USER(r1[,...,r30])e ??=????为微分方程表达式,用户可以自定义表达式来定义微分方
程。其格式中,USER 为字符串,r1[,…,r30]为数值表,传递系统变量到用户定义子程序DIFSUB 中。在函数表达式中,DIF (i )为DIFF/i 语句中定义的变量值。DIF1(i )为DIFF/i 语句定义的变量的导数。
举例如下:
DIFF/1, IC=2
,FUNCTION = -5.0*DIF(1) + 8.0 + COS(TIME)
DIFF/1定义了变量的显式形式为:
()58cos y y t ?
=-++,y(0) = 2
DIFF/2, IC=2, IMPLICIT
, FUNCTION = DIF1(2) + 5.0*DIF(2) - 8.0 - COS(TIME)
DIFF/2定义公式的隐式形式为:
()58cos 0y y t ?
+--= y(0) = 2
V ARIABLE :V ARIABLE 语句以代数表达式的形式定义变量。其格式如下:
/, [] (1[,...,30])e VARIABLE id IC r FUNCTION USER r r ??==???
? IC 为V ARIABLE 的初始值。
????
??=r30])..,USER(r1[,.FUNCTION e 为V ARIABLE 的表达式子程序中定义的变量。如果显通过表达式来定义变量,FUNCTION 后面需要有等号和表达式。如果用用户子程序来定义变量,FUNCTION 后面需要有等号,字符串USER ,以及ADAMS/Solver 将要传递给用
第6章 ADAMS 模型语言及仿真控制语言
户子程序V ARSUB 的值(r1[,…r30])
举例如下:
V ARIABLE/4, FUNCTION = IMPACT(DZ(10,90),
, VZ(10,90), 1, 3E5, 1.2, 1,.05)
该V ARIABLE 语句利用碰撞函数定义了一个变量。
6.2.8轮胎单元
TIRE :TIRE 语句定义轮胎单元。该语句可以模拟车辆与地面之间的相互作用力以及轮胎的旋转作用,须提供轮胎的属性文件(.tpf )和路面数据文件(.rdf )。轮胎属性文件包含一些参数,如ADAMS/Solver 用来计算轮胎力的cornering stiffness (侧偏刚度)。而且轮胎模型类型不同,轮胎属性文件中的须提供的参数也不相同。路面数据文件(.rdf )定义了轮胎碾过的路面数据。
TIRE 的其格式如下:
???????
?????=====?????????????????
???????????????????????????????===??????????
??????????????????????????????????============id JOINT ,r]V Z r][,V Y r][,V X NONE[,JOINT ,id30]id[,...,USTRING S ,r30]r1[,...,S UPARAMETER ,USER UATIRE SMITHERS FIALA DELFT MODEL ,r WZ ,r]WIDTH i[,SEG S ,r]ALPHA0r[,RLENG TH ,RG RA ,c RDF ,z y,x ,CMOFFSET ,id IMARKID ,c
TPF r,MASS id,J yz], x z,x y,zz[, yy,x x ,IP TIRE/id,
轮胎是一个综合单元,它代表了由一些更基本的ADAMS/Solver 语句组成的复杂实体,这些语句包括PART,MARKER,GRAPHICS,和GFORCE 。当每次创建一个TIRE 时,ADAMS/Solver 会自动地创建这些语句。这些组成部分的作用如下:
● PART :用来表达轮胎的惯性力。
● GFORCE :以一组三维力和力矩来表达车辆与路面的相互作用。
● MARKERS :指定连接点处的坐标。
● JOINT :将轮胎连接到车辆上。
● GRAPHICS :显示轮胎和路面状况。
机械系统动力学分析及ADAMS应用
语句中的各部分参数意义如下:
●ALPHA0=r :指明αold 的初始值,用来计算轮胎侧偏角的一阶滞后影响。
●CMOFFSET=x,y,z:定义从I MARKER点到轮胎质心处的位移。x,y和z为I MARKER
的坐标值。轮胎质心MARKER与I MARKER的坐标方向相同。
●IMARKID=id:为TIRE创建的I MARKER的id号。I MARKER为轮胎连接到车辆上
的位置和方向。如果没有指明I MERKID时,ADAMS/Solver会在内部创建I
MARKER。当使用了JOINT=NONE选项时,必需要指明I MARKER。
●IP=xx,yy,zz[,xy,xz,yz]:指明轮胎的6个惯性矩(积)。惯性矩(积)相对于轮胎的质
心坐标CM。
●J=id:为轮胎被连接到车辆上的MARKER的id号。J MARKER的z 轴必须平行于轮
胎的旋转轴(使用右手法则)。如果车辆的四个轮子都向前旋转,则四个轮胎的J MARKER的z 轴都要指向左边。
●JOINT=id:指明TIRE语句中创建的连接点转动铰链的id号。JOINT缺省时为
ADAMS/Tire自动创建的id值。
●JOINT=NONE:允许创建轮胎,但不直接连到车辆上。需要使用JOINT或者
BUSHING进一步语句才能将轮胎安装到车辆上。
●MASS=r:指明轮胎部分的质量。该值包括轮胎,轮辋和所有刚性连接的旋转子部
件(如刹车片等等)。
●RDF=c:指明路面数据文件(RDF)的路径和文件名。该路面数据文件包含了一个
三维路谱和路面的摩擦属性的信息。
●RGRA:定义一个flag值(0或1),1使ADAMS/Solver自动生成路面图形。该图形是
由TIRE命令中指明的路面数据文件中的数据生成的。
●RLENGTH为考虑轮胎侧偏角一阶滞后影响的松弛长度(relaxation length)。
●SEGS为圆柱和锥体的两个平行的圆之间的绘制的直线段的数量,近似的代表圆的
圆周。
●TPF=c:为轮胎属性文件的路径和文件名。轮胎属性文件包含了DAMS/Solver用来
计算在给定的系统条件下的轮胎力和力矩的所有的输入数据。
●UPARAMETERS=r1[,...,r30]:定义了至多三十个实数用来传递给TIRSUB函数。●USTRINGS=id1[,...,id30]:定义了至多三十个字符串标志符,它们的相应的字符串
被传递给TIRSUB。
●VX=r,VY=r,VZ=r:指明了轮胎质心处沿着全局坐标系的x ,y,z轴的初始速
度。
●WIDTH=r:为轮胎的宽度。
●WZ=r:轮胎相对于I MARKER的z 轴的初始的旋转速度。
举例如下:
TIRE/1, J=303
, MASS=10,
, IP=25.0E4,25.0E4,33.0E4
, TPF=TIRE.TPF
第6章 ADAMS 模型语言及仿真控制语言
该例子中,缺省文件为Fiala 模型。缺省的路面为平直路面。另外,所有需要的单元被自动创建。下面的一个例子涉及到了一些初始转速和路面图形:
TIRE/2, J=305
, MASS=10,
, IP=25.09E4,25.09E4,33.56E4
, TPF=TIRE.TPF
, WZ=22.5
, SEGS=5
, RGRA
6.2.9数据单元
数据单元包括ARRAY ,CURVE ,MATRIX ,PINPUT ,POUTPUT ,SPLINE ,STRING ,这里分别对ARRAY ,CURVE 语句进行介绍。
ARRAY :ARRAY 语句定义一组数组,其中可包括输入变量(U ),状态变量(X ),和输出变量(Y ),或者与系统单元GSE ,LSE 和TFSISO 相关的的初始条件。
其语句形式如下:
????????
??????======r1200]r1[,...,NUMBERS i],SIZE [, IC][,i]SIZE [, Y ,id1200]id1[,...,V ARIABLES i],SIZE [, U ,i]SIZE [,X ,ARRAY /id ● IC 创建一维数组,可以在用户自定义子程序中引用。也可以为LSE 或者GSE 来分配
初始状态数组。
● NUMBERS=r1[,...,r1200]:当使用IC 数组时,允许输入一维的实数组。
● SIZE=I :定义数组的大小。范围为1到1200。
● V ARIABLES=id1[,...,id1200]:将全部V ARIABLE 的id 集合。
● X :对于系统单元LSE ,GSE 或者TFSISO ,将 ARRAY 命令指定为状态变量数组。 ● U :将集合了V ARIABLES 创建为数组。
● Y :对于系统单元LSE ,GSE 或者TFSISO ,将 ARRAY 命令指定为输出数组。 举例如下:
ARRAY/1, X
ARRAY/2, U, V ARIABLES=2
ARRAY/3, IC, NUMBERS= 0.0, 0.0
CURVE::该语句定义三维参数曲线,其表达式如下所示:
机械系统动力学分析及ADAMS 应用
/, , (1[,...,30])\ ,__ [,]OPEN CURVE id CLOSED MINPAR r FUNCTION USER r r MAXPAR r CONTROL POINTS MATRIX id CURVE POINTS TENSION r ?????
????=???=??????=????????????=????=????
● CLOSED :曲线是闭环曲线。
● OPEN :曲线为开环曲线。
● FUNCTION=USER (r1[,...,r30])\:定义并传递参数给用户子程序CURSUB 以计算曲
线坐标和偏导。
● MAXPAR=r :用户子程序定义曲线参数的最大值。缺省值为1.0。
● MINPAR=r :为用户子程序定义曲线参数的最小值。缺省值为-1.0。
● MATRIX=id :为包含曲线数据的MA TRIX 的id 号。
● CONTROL_POINTS : 基于控制点的三次多项式的B 样条曲线。
● CURVE_POINTS :曲线通过数据点。
● TENSION=r :为B 样条曲线运算使用中的收敛因子。缺省值为0.05。其范围为0到无
穷大。
举例如下:
CURVE/5, OPEN, CURVE_POINTS, MATRIX=2
该语句以MARTRIX/2中的曲线点坐标创建了一条开环曲线。ADAMS/Solver 以B 样条曲线来对该点进行插值。
6.2.10分析参数单元
分析参数单元包括DEBUG ,EQUILIBRIUM ,IC ,INTEGRATOR ,KINEMATICS , SENSOR ,UINT 。这里分别对DEBUG , EQUILIBRIUM 语句进行介绍。
DEBUG :该语句用于输出数据的定义以方便系统调试。其语句形式如下:
}{[]??
??????????????????????????????????????????TOPOLOG Y ,DOF ,RHSDUMP ,JMDUMP ,REQDUMP ,V EBOSE ,EPRINT DUMP DEBUG /
● DOF :将自由度信息以表格文件的形式打印出。缺省为Off 。
● DUMP :将系统的方程按ADAMS/Solver 内部表示法文件的形式打印出。缺省为Off 。 ● EPRINT :打印出每一步长下的信息,可以根据输出的信息确定误差的来源。缺省
为Off 。
● JMDUMP :在每次迭代时雅可比矩阵运算信息。缺省为Off 。
● REQDUMP :在每次迭代时,对REQUEST 和MREQUEST 进行输出。缺省为Off 。 ● RHSDUMP :在每次迭代时,对YY 数组(状态向量),RHS 数组(误差信息),和
DELTA 数组(状态向量的增量)进行输出。缺省为Off 。
第6章 ADAMS 模型语言及仿真控制语言
● TOPOLOGY :msg 文件中打印出系统拓扑结构数据。缺省为Off 。
● VERBOSE :将附加的信息打印到屏幕,如子程序名等。缺省为Off 。
举例如下:
DEBUG/EPRINT
该DEBUG 语句将打印出每一步长下的信息。
EQUILIBRIUM :该EQUILIBRIUM 语句指明了在静平衡分析和准静态分析中的误差和其它参数。其语句形式如下:
, , ,, , 1 [ : . . . : 10], /, _ ,_,ALIMIT r ERROR r IMBALANCE r STATIC MAXIT r PATTERN c c STABILITY r EQUILIBRIUM TLIMIT r ACCELERATION ERROR r GLOBAL DYNAMIC ?=???????=????????=????=????????=????=????????=????= ,__ ,_ DAMPING r KINETIC ENERGY ERROR r SETTLING TIME r ????????????????????????????????????=????????????=??????=??????????
● ACCELERATION_ERROR=r :利用动力学仿真进行静力学仿真时允许的最大加速
度误差。缺省值为1.0E-02,取值范围大于零。
● ALIMIT=r :在进行静态仿真时允许的最大角度增加量。缺省值为0.17453(10D ),
取值范围大于零。
● DYNAMIC : ADAMS/Solver 利用动力学进行静力学仿真。
● ERROR=r :在静力学仿真时允许的最大相对位移误差。缺省值为1.0E-04,取值范
围大于零。
● GLOBAL_DAMPING=r :指明动力学仿真时施加在所有物体上的阻尼系数。缺省值
为0,取值范围大于等于零。
● IMBALANCE=r :在静态仿真时允许的最大不平衡力。缺省值为1.0E-04,取值范围
大于零。
● KINETIC_ENERGY_ERROR=r :指明在静态仿真时最大动能误差。缺省值为
1.0E-02,取值范围大于零。
● MAXIT=I:在静态仿真时最大迭代数。缺省值为25,取值范围大于零。
● PATTERN=c1[:...:c10]:在静力学仿真中Newton-Raphson 迭代的雅可比矩阵是否进
行更新运算。
● SETTLING_TIME=r :在利用动力学分析进行静力学仿真时允许的最长时间。缺省
值为100,取值范围大于零。
● STABILITY=r:将质量阵和阻尼阵按此比例增加到刚度阵,将增加收敛速度而不影
响精度。
● STA TIC=r :ADAMS/Solver 使用静态分析进行静力学仿真。缺省为STA TIC 。
机械系统动力学分析及ADAMS 应用
● TLIMIT=r :指明在静态仿真时最大平移增量。缺省值为20,取值范围大于零。 举例如下:
EQUILIBRIUM/ STABILITY=0.01, TLIMIT=10
, IMBALANCE=1.0E-05
6.2.11输出单元
输出单元包括FEMDATA ,LIST/NOLIST ,MREQUEST ,OUTPUT ,REQUEST ,RESULTS 。这里分别对FEMDATA, MREQUEST 语句进行介绍。
FEMDATA :该语句输出构件载荷,变形,应力和应变的数据文件,以作为有限元分析金或疲劳寿命分析的输入。如果使用OUTPUT 命令就必需要指明FEMDATA 产生文件的类型。只有在OUTPUT 命令中指明了格式FEMDATA 才会输出文件。其语句格式如下:
[][][][][]
[]
[]
[]
n SKIP , t2 END , t1 START name FILE ,idn][,? id1 NODE id, FLEX_BODY ,STRESS,idn][,? id1 NODE id, FLEX_BODY STRAIN,idn][,? id1 NODE ,node_id DATUM id, FLEX_BODY RMATION,NODAL_DEFO id FLEX_BODY RMATION,MODAL_DEFO GMAG :FMAG :FZ :FY :FX PEAK_SLICE ,id FLEX_BODY id RM LOADS,,
FEMDATA/id ====??????????????????========???=???==
●
LOADS :输出所有施加在指定物体上的外部力以及惯性力,以时间为函数的。 ●
RM = id :输出载荷的参考坐标系。 ●
FLEX_BODY = id : 指明FENDATA 输出数据的柔性体的ID 值。 ●
PEAK_SLICE = FX:FY:FZ:FMAG:GMAG :在载荷的峰值处输出FEM 载荷数据。 ●
MODAL_DEFORMA TION :输出指定柔性体上模态变形,以时间为函数的。 ●
NODAL_DEFORMA TION :输出指定柔性体上节点变形,以时间为函数的。 ●
DATUM = node_id :指明节点的ID 。ADAMS/Solver 根据节点的ID 来计算节点的位移。 ●
NODE = id1 [,…,idn]:指明将要输出数据的节点集合。 ●
STRAIN :输出在指定物体上的应变信息。 ●
STRESS :输出在指定物体上的应力信息。 ●
FILE = name :对FEM 数据指明输出文件名。 ●
START = t1:指明输出数据的开始时间。缺省情况下为仿真开始时间。 ● END = t2:指明时间t2,在该时间点终止数据输出。
液压挖掘机工作装置在ADAMS中的运动 仿真解析 姓名:XXX 部门:XXX 日期:XXX
液压挖掘机工作装置在ADAMS中的运动仿真解析虚拟样机技术在使用过程中为液压挖掘机设计提供了有效的方法 和手段,在使用过程中受到了条件限制,较少的单位会对运行学进行仿真研究,降低了色剂方案可行性。文章基于动力学仿真软件ADAMS建立起了挖掘机工作装置虚拟系统,更好的完成了前期处理工作,使得建模正确性更高。 液压缸顺序工作的运动仿真分析 1.1.基于尺寸确定 当液压的挖掘机工作装置尺寸以及基本结构都确定下来之后,该挖掘机的工作范围也基本确定下来。简单理解就是挖掘机铲斗齿尖轨迹的包络图得以确定。在包括图中,有些部分区间靠近的比较紧密,有的会深入到挖掘机停点底部下,这一个位置虽然还可以挖掘到,但是在挖掘过程中会引起土壤坍塌,从而影响机械运行稳定,使得施工安全性受到影响。在以上动臂液压缸、斗杆液压缸和铲斗液压缸运动仿真分析过程中,选择的挖掘机工作顺序和方式一般都是在装置范畴内,这里讲解的顺序指的是,挖掘工作进行时,各个油缸都是根据一定顺序进行收缩或者伸出。例如:挖掘进行时,需要先下降动动臂,再收回斗杆,这个动作完成之后,在使用铲斗进行挖掘。 1.2.顺序工作运动仿真实现的路线 仿真路线是,在斗杆液压缸、动臂液压缸、铲斗液压缸上进行设置,一般在不同的时间段内,它的运动驱动函数都不同,需要进行调节处理,使得各缸在相应的工作极限范围内相互运行,这样就可以获得挖掘机的工作范围。可以在液压缸移动副约束处添加移动驱动,改变运动方式, 第 2 页共 5 页
将其更换成位移运动方式。运动的函数输入时,需要注意相匹配的的STEP函数。对液压缸进行STEP函数值设置时,应该满足运动函数需求。当完成了函数值输入之后,在运行状态下可以启动ADAMS软件的仿真模块。 1.3.仿真过程 当工作面从最初的范围逐渐移动时,一般最初的指的是停机状态下。可以适当的对斗杆、铲斗液压缸进行调整,将其保持在全缩的状态中,逐渐对动臂液压缸拉伸,将其缩小到CD弧线上。这个伸缩过程需要得到弧线支撑,基于保障弧线运动轨迹基础上做好控制工作。其中在进行一次姿态调整之后,作业范围会缩小,而且包络图中的各个点会逐渐深入挖掘机的底部,在这个范围上可以实现挖掘,但是可能出现塌陷实现,导致机械无法正常施工。因此,一般除了有条件的挖沟作业之外进行使用,其他施工一般都不会使用。可以在模型中建立起一个处于回转中心轴的三维坐标,将坐标点确定为(608,.0,0.0,1254.3306),这样就可以测量出方向移动值,可以得出这个位置的位移,这样便可以达到最大高度值,其实这个测量方法比较简单,也比较容易掌握。根据曲线变化得出,从得到的曲线中得出最终的数值,可以查看到最大值,平均值以及最小值等。 工作装置模型的运动学仿真分析 2.1.参数范围 运动学仿真中的参数范围确定一般都包含速度、位移以及加速度,这些参数会有一个变化范围。在进行运动学仿真分析中,需要基于ADAMS/Solver求解,就可以得出代数方程。因此,在进行仿真系统自由度确认时,一般自由度的必须为零。如果这个时候会考虑到物体的惯性 第 3 页共 5 页
13柔性体介绍 (253) 13.1柔性体引入ADAMS建模 (253) 13.1.1打开原有的X5后悬架模板 (253) 13.1.2将小连杆的模态中性文件导入ADAMS (254) 13.2利用Hyper Mesh及Motion View软件来生成模态中性文件MNF (256) 13.2.1创建小连接杆的CAD模型 (256) 13.2.2将iges格式文件导入到Hyper Mesh划分网格 (257) 13.2.3创建材料 (268) 13.2.4创建刚性单元 (273) 13.2.5给刚性中心节点编号 (282) 13.2.6导出nastran模板格式文件 (283) 13.2.7创建h3d文件及MNF文件 (284) 252
《柔性体篇》 13柔性体介绍 在模型中引入柔性体可以提高仿真的精度。柔性体可采用模态中性文件(MNF)来描述。该文件是一个二进制文件,包含了以下信息: 几何信息(结点位置及其连接); 结点质量和惯量; 模态; 模态质量和模态刚度。 可以利用ANSYS、NASTRAN、ABAQUS等限元软件包进行分析并将结果写成模态中性文件,输入到ADAMS/View或ADAMS/Car中,建立相应零件的柔性体。 13.1柔性体引入ADAMS建模 在模型中引入柔性体首先要在ADAMS/Car中读入模态中性文件,然后ADAMS/Car会创建必要的几何实体用以显示柔性体。然后在模型中与其它刚体部件之间施加约束。本教程以后悬架的小连接板为例。 13.1.1打开原有的X5后悬架模板 253
13.1.2将小连杆的模态中性文件导入ADAMS 在ADAMS/Car中读入模态中性文件的过程如下: Parts>Flexible Body>New 1)从Build菜单中选择 设定对话框如下,在Left Modal Neutral File和Right Modal Neutral File里右击鼠标选择自己已经创建好的MNF文件,点击OK。 254
ADAMS大作业 机构名称:平板式抓取机构 指导老师:贾璐 学号: 姓名:H L 班级:机制一班
目录 1、启动工作环境 (2) 1.1启动ADAMS软件 (2) 2、设置工作环境 (2) 2.1设置工作网格 (2) 2.2设置图标 (3) 2.3调出坐标 (3) 2.4设置单位 (3) 3、建模 (3) 3.1画出平面闭合曲线 (3) 3.1.1平面闭合曲线一的绘制 (3) 3.1.2曲线二的绘制 (4) 3.1.3曲线三的绘制 (5) 3.1.4曲线四的绘制 (5) 3.2拉伸成三维实体 (5) 3.2.1曲线一的拉伸 (6) 3.2.2曲线二的拉伸 (6) 3.2.3曲线三的拉伸 (6) 3.2.4曲线四的拉伸 (6) 3.3孔的绘制 (7) 3.4贯通杆的绘制 (8) 3.5使贯通杆与Part5形成一个整体 (8) 3.6长方体块的绘制与移动 (8) 3.6.1绘制 (8) 3.6.2移动 (9) 3.7连杆的绘制 (10) 4、添加各种副 (11) 4.1添加转动副 (11) 4.2添加固定副 (12) 4.3添加移动副 (12) 5、添加运动及运动函数的编辑 (13) 5.1添加运动 (13) 5.2运动函数的编辑 (13) 6、防真 (14) 7、防真分析 (15) 7.1位移曲线一的生成 (15) 7.2位移曲线二的生成 (16) 7.3角度曲线的生成 (17) 8、视频输出 (18) 9、退出ADAMS (20) 10、感想 (20)
1、启动工作环境 1.1启动ADAMS软件 双击ADAMS图标,命名如图1-1,点击进入ADAMS 工作环境。右击,点击,将背景颜色修改为白色。 图1-1 2、设置工作环境 2.1设置工作网格 点击,选择其中的,将工作网格设置为如图2-1所示,点击完成设置。
液压挖掘机工作装置在ADAMS中的运动仿真解 析参考文本 In The Actual Work Production Management, In Order To Ensure The Smooth Progress Of The Process, And Consider The Relationship Between Each Link, The Specific Requirements Of Each Link To Achieve Risk Control And Planning 某某管理中心 XX年XX月
液压挖掘机工作装置在ADAMS中的运动仿真解析参考文本 使用指引:此安全管理资料应用在实际工作生产管理中为了保障过程顺利推进,同时考虑各个环节之间的关系,每个环节实现的具体要求而进行的风险控制与规划,并将危害降低到最小,文档经过下载可进行自定义修改,请根据实际需求进行调整与使用。 虚拟样机技术在使用过程中为液压挖掘机设计提供了 有效的方法和手段,在使用过程中受到了条件限制,较少 的单位会对运行学进行仿真研究,降低了色剂方案可行 性。文章基于动力学仿真软件ADAMS建立起了挖掘机工 作装置虚拟系统,更好的完成了前期处理工作,使得建模 正确性更高。 液压缸顺序工作的运动仿真分析 1.1.基于尺寸确定 当液压的挖掘机工作装置尺寸以及基本结构都确定下 来之后,该挖掘机的工作范围也基本确定下来。简单理解 就是挖掘机铲斗齿尖轨迹的包络图得以确定。在包括图
中,有些部分区间靠近的比较紧密,有的会深入到挖掘机停点底部下,这一个位置虽然还可以挖掘到,但是在挖掘过程中会引起土壤坍塌,从而影响机械运行稳定,使得施工安全性受到影响。在以上动臂液压缸、斗杆液压缸和铲斗液压缸运动仿真分析过程中,选择的挖掘机工作顺序和方式一般都是在装置范畴内,这里讲解的顺序指的是,挖掘工作进行时,各个油缸都是根据一定顺序进行收缩或者伸出。例如:挖掘进行时,需要先下降动动臂,再收回斗杆,这个动作完成之后,在使用铲斗进行挖掘。 1.2.顺序工作运动仿真实现的路线 仿真路线是,在斗杆液压缸、动臂液压缸、铲斗液压缸上进行设置,一般在不同的时间段内,它的运动驱动函数都不同,需要进行调节处理,使得各缸在相应的工作极限范围内相互运行,这样就可以获得挖掘机的工作范围。可以在液压缸移动副约束处添加移动驱动,改变运动方
第10章 ADAMS参数化建模及优化设计
本章将通过一个具体的工程实例,介绍ADAMS/View的参数化建模以及ADAMS/View 提供的3种类型的参数化分析方法:设计研究(Design study)、试验设计(Design of Experiments, DOE)和优化分析(Optimization)。其中DOE是通过ADAMS/Insight来完成,设计研究和优化分析在ADAMS/View中完成。通过本章学习,可以初步了解ADAMS参数化建模和优化的功能。 10.1 ADAMS参数化建模简介 ADAMS提供了强大的参数化建模功能。在建立模型时,根据分析需要,确定相关的关键变量,并将这些关键变量设置为可以改变的设计变量。在分析时,只需要改变这些设计变量值的大小,虚拟样机模型自动得到更新。如果,需要仿真根据事先确定好的参数进行,可以由程序预先设置好一系列可变的参数,ADAMS自动进行系列仿真,以便于观察不同参数值下样机性能的变化。 进行参数化建模时,确定好影响样机性能的关键输入值后,ADAMS/View提供了4种参数化的方法: (1)参数化点坐标在建模过程中,点坐标用于几何形体、约束点位置和驱动的位置。点坐标参数化时,修改点坐标值,与参数化点相关联的对象都得以自动修改。 (2)使用设计变量通过使用设计变量,可以方便的修改模型中的已被设置为设计变量的对象。例如,我们可以将连杆的长度或弹簧的刚度设置为设计变量。当设计变量的参数值发生改变时,与设计变量相关联的对象的属性也得到更新。 (3)参数化运动方式通过参数化运动方式,可以方便的指定模型的运动方式和轨迹。 (4)使用参数表达式使用参数表达式是模型参数化的最基本的一种参数化途径。当以上三种方法不能表达对象间的复杂关系时,可以通过参数表达式来进行参数化。 参数化的模型可以使用户方便的修改模型而不用考虑模型内部之间的关联变动,而且可以达到对模型优化的目的。参数化机制是ADAMS中重要的机制。 10.2 ADAMS参数化分析简介 参数化分析有利于了解各设计变量对样机性能的影响。在参数化分析过程中,根据参数化建模时建立的设计变量,采用不同的参数值,进行一系列的仿真。然后根据返回的分析结果进行参数化分析,得出一个或多个参数变化对样机性能的影响。再进一步对各种参数进行优化分析,得出最优化的样机。ADAMS/View提供的3种类型的参数化分析方法包括:设计研究(Design study)、试验设计(Design of Experiments, DOE)和优化分析(Optimization)。 10.2.1 设计研究(Design study) 在建立好参数化模型后,当取不同的设计变量,或者当设计变量值的大小发生改变时,仿真过程中,样机的性能将会发生变化。而样机的性能怎样变化,这是设计研究主要考虑的内容。在设计研究过程中,设计变量按照一定的规则在一定的范围内进行取值。根据设计变
1起重机的建模和仿真,如下图所示。 1)启动ADAMS 1. 运行ADAMS,选择create a new model; 2. modal name 中命名为lift_mecha; 3. 确认gravity 文本框中是earth normal (-global Y),units文本框中是MKS;ok 4. 选择setting——working grid,在打开的参数设置中,设置size在X和Y方向均为20 m,spacing在X和Y方向均为1m;ok 5. 通过缩放按钮,使窗口显示所有栅格,单击F4打开坐标窗口。 2)建模 1. 查看左下角的坐标系为XY平面 2. 选择setting——icons下的new size图标单位为1
3. 在工具图标中,选择实体建模按钮中的box按钮 4. 设置实体参数; On ground Length :12 Height:4 Depth:8 5. 鼠标点击屏幕上中心坐标处,建立基座部分 6. 继续box建立Mount座架部件,设置参数: New part Length :3 Height:3 Depth: 3.5 设置完毕,在基座右上角建立座架Mount部件 7. 左键点击立体视角按钮,查看模型,座架Mount不在基座中间,调整座架到基座中间部位:
①右键选择主工具箱中的position按钮图标中的move按钮 ②在打开的参数设置对话框中选择Vector,Distance项中输入3m,实现Mount 移至基座中间位置 ③设置完毕,选择座架实体,移动方向箭头按Z轴方向,Distance项中输入2.25m,完成座架的移动 右键选择座架,在快捷菜单中选择rename,命名为Mount 8. 选择setting—working grid 打开栅格设置对话框,在set location中,选择pick 选择Mount.cm座架质心,并选择X轴和Y轴方向,选择完毕,栅格位于座架中心
曲柄滑块机构的仿真与分析: 图中件1、2、为齿轮,按圆柱建模,其中齿轮2半径350mm、厚度50mm;齿轮1半径150mm、厚度40mm;件3连杆(宽150mm;厚60mm)、件4长方体滑块(长600mm、宽300mm、高400mm),要求整个模型与栅格成对称状态。其中:齿轮1材料密度为7.8 10-3kg/cm2;连杆3质量Q=65kg,惯性矩Ixx=0.132kg.m2,Iyy=6.80kg.m2,Izz=6.91kg.m2;滑块4材料为铝。 绘图步骤简介: 步骤1:启动ADAMS/View程序 1)选择MD Adams>Adams-view MD 2010 2)在打开的对话框中选择create a new model 。 3)选择start in 后在单击,在自己指定的工作目录下新建的一个文件夹,以保存样机模型。 4)在model name栏中输入模型名称:model_lixiang 5)在gravity选项栏中选择earth normal(-global Y)。 6)在units文本框设定为MMKS—mm、kg、N、s、deg 。 7)单击ok按钮。如图:
步骤2:设定建模环境 1)选择settings>working grid,按图所示进行设置工作栅格大小及间距。 2)单击ok按钮,可看到工作栅格已经改变。 3)在主工具箱中选择,显示view控制图标。 4)按F键或在主工具箱中单击,可看到整个工作栅格。 步骤3:样机建模 1、创建设计点 1)在集合建模工具集中,单击点工具图标 2)在主工具箱的选项栏中选择添加到零件上add to ground。 3)在建模视窗中,先点击ground,再选择该点,点击右键,打开修改点对话框,修改坐标为A(-800,-20,20),重复此过程,依次创建点B(-300,0,25)、C(0,0,0)、D(1000,0,0) 2、创建驱动齿轮1 1)在集合建模工具集中,单击圆柱工具图标、。 2)在主工具箱的选项栏中选择新零件new part 3)在长度选项输入40mm、半径选项输入150mm,如图(1)。 4)在建模视窗中,点击点(-800,-20,20),水平拖动鼠标至点的右边点击,创建圆柱体5)旋转圆柱体与屏幕垂直:鼠标放在圆柱体左端附近,点击右键,选择标记点marker菜单,
英文资料翻译:MSC.ADAMS/View使用入门 MSC.ADAMS/View 使用入门练习 欢迎浏览MSC.Software的网址 美国总部:https://www.doczj.com/doc/ad3707872.html, 中国办事处:https://www.doczj.com/doc/ad3707872.html,
目 录 第一章弹簧挂锁设计问题介绍 总论--------------------------------------------------------------------------------1 你将学习的内容----------------------------------------------------------------------1 你将创建的模型----------------------------------------------------------------------2 设计要求------------------------------------------------------------------------3 弹簧挂锁的工作原理--------------------------------------------------------------3 第二章建模 总论--------------------------------------------------------------------------------5 建造曲柄和手柄----------------------------------------------------------------------5 启动ADAMS/View并建立一个新的数据文件-------------------------------------------6 熟悉ADAMS/View的界面 ----------------------------------------------------------6 设置工作环境--------------------------------------------------------------------7 创建设计点----------------------------------------------------------------------8 建造曲柄(pivot)---------------------------------------------------------------9 重新命名曲柄(pivot)-----------------------------------------------------------9 建造手柄(handle)--------------------------------------------------------------9 用转动副连接各个构件------------------------------------------------------------9 模拟模型的运动-----------------------------------------------------------------10 观察参数化的效果---------------------------------------------------------------10 建造钩子(Hook)和连杆(Slider)---------------------------------------------------10 建造钩子和连杆-----------------------------------------------------------------11 用铰链连接各构件---------------------------------------------------------------12 模型运动仿真-------------------------------------------------------------------12 存储你的数据文件-------------------------------------------------------------------12 第三章测试初始模型 总论-------------------------------------------------------------------------------13 生成地块(Ground Block)-------------------------------------------------------------14 加一个Inplane 虚约束---------------------------------------------------------------14 加一个拉压弹簧---------------------------------------------------------------------15 加一个手柄力-----------------------------------------------------------------------15 弹簧力的测试-----------------------------------------------------------------------16 角度测试---------------------------------------------------------------------------17 生成一个传感器---------------------------------------------------------------------18 存储模型---------------------------------------------------------------------------18 模型仿真---------------------------------------------------------------------------18 第四章验证测试结果 总论-------------------------------------------------------------------------------20 输入物理样机试验数据---------------------------------------------------------------20 用物理样机试验数据建立曲线图-------------------------------------------------------21 编辑曲线图-------------------------------------------------------------------------22 用仿真数据建立曲线图---------------------------------------------------------------22 存储模型--------------------------------------------------------------------------23
7.1机械夹紧机构建模使用实例 机械系统建模实例将创建一种机械夹紧机构模型,是阿波罗登月计划中用于夹紧登月舱和宇宙飞船的十二个夹紧机构之一。夹紧机构包括:摇臂(Pivot)、手柄(Handle)、锁钩(Hook)、连杆(Slider)和固定块(ground Block)等物体。 夹紧机构的工作原理是:如图7-1所示,在夹紧机构手柄(Handle)处施加一个作用力,驱动机构运动,使其锁钩(Hook)处产生十倍于作用力的夹紧力,用于夹紧登月舱和宇宙飞船。 夹紧机构的设计要求是:至少产生800N的夹紧力;施加在手柄上的力应不大于80N;释放手柄的力应最小;在振动环境中夹紧机构应安全可靠。 手柄Handle 锁钩Hook 图7-1 夹紧机构三维模型图 以下将从创建几何构件、添加约束、添加载荷及结果后处理等几个方面详细介绍机械夹紧机构模型的建立。通过本实例的学习,能够详细了解ADAMS软件设计流程及使用方法。 7.1.1创建几何构件 1、创建新模型 本实例将使用ADAMS/View的零件库、约束库和力库创建夹紧机构模型。 首先打开ADAMS/View,选择“Create a new model”,模型名称(Model Name):Latch,点击OK,创建新模型完毕。其它设置如图7-2所示:
图7-2 创建新模型 2、设置工作环境 选择菜单栏【Settings】→【Units】命令,设置模型物理量单位,如图7-3所示: 图7-3设置模型物理量单位 选择菜单栏【Settings】→【Working Grid】命令,设置工作网格,如图7-4所示:
图7-4设置工作网格 3、创建设计点 设计点是几何构件形状设计和位置定位的参考点。本实例将通过设计点列表编辑器创建几何构件模型所需要的全部设计点。 选择并点击几何模型库(Geometric Modeling)中的点(Point),下拉菜单选择(Add to Ground)、(Don’t Attach),并单击Point Table列表编辑器,创建并生成Point_1、Point_2等六个设计点,如图7-5、图7-6所示: 图7-5设计点列表编辑器
一.ADAMS软件简介 (2) 1.1ADAMS软件概述 (2) 1.2用户界面模块(ADAMS/View) (3) 1.3求解器模块(ADAMS/Solver) (5) 1.4后处理模块(ADAMS/PostProcessor) (6) 1.5控制模块(ADAMS/Controls) (8) 二.典型机器人虚拟实验 (9) 2.1串联机器人 (9) 2.1.1 运动学分析 (9) 2.1.2 动力学分析 (14) 2.1.3 轨迹规划 (17) 2.1.4 基于ADAMS和MATLAB的联合运动控制 (22)
一.ADAMS软件简介 虚拟样机仿真分析软件ADAMS(Automatic Dynamic Analysis of Mechanical Systems)是对机械系统的运动学与动力学进行仿真的商用软件,由美国MDI (Mechnical Dynamics Inc.)开发,在经历了12个版本后,被美国MSC公司收购。ADAMS集建模、计算和后处理于一体,ADAMS有许多个模块组成,基本模块是View模块和Postprocess模块,通常的机械系统都可以用这两个模块来完成,另外在ADAMS中还针对专业领域而单独开发的一些专用模块和嵌入模块,例如专业模块包括汽车模块ADAMS/Car、发动机模块ADAMS/Engine、火车模块 ADAMS/Rail、飞机模块ADAMS/Aircraft等;嵌入模块如振动模块 ADAMS/Vibration、耐久性模块ADAMS/Durability、液压模块ADAMS/Hydraulic、控制模块ADAMS/Control和柔性体模块ADAMS/AutoFlex等[3]。 1.1ADAMS软件概述 ADAMS是以计算多体系统动力学(Computational Dynamics of Multibody Systems)为基础,包含多个专业模块和专业领域的虚拟样机开发系统软件,利用它可以建立复杂机械系统的运动学和动力学模型,其模型可以是刚体的,也可以是柔性体,以及刚柔混合体模型。如果在产品的概念设计阶段就采取ADAMS进行辅助分析,就可以在建造真实的物理样机之前,对产品进行各种性能测试,达到缩短开发周期、降低开发成本的目的。 ADAMS,即机械系统动力学自动分析(Automatic Dynamic Analysis of Mechanical Systems)该软件是美国MDI公司(Mechnical Dynamics Inc.)开发的虚
Adams 实例建模仿真 目录 Adams课程论文 (1) 第一章模型的建立 (2) 1、模型的介绍 (2) 2、启动ADAMS (2) 3、栅格设置 (3) 4、创建齿轮 (3) 5、创建连杆 (5) 6、创建滑块 (6) 第二章创建转动副,移动副,齿轮副,驱动力,仿真 (7) 1、创建转动副 (7) 2、创建移动副 (8) 3、创建齿轮副 (9) 4、创建驱动力 (10) 5、仿真 (11) 第三章计算结果后处理 (12) 1、滑块的速度曲线 (12) 2、滑块位移曲线 (12) 3、滑块加速度曲线 (13) 4、齿轮1与齿轮2转角曲线 (13) 5、连杆曲线图 (14) 6、录制动画并导出 (15) 第四章总结 (17)
第一章模型的建立 1、模型的介绍 如图一所示,该模型由齿数z为200,模数m为4,半径400mm的齿轮1,齿数z为100,模数m为4,半径200mm的齿轮2,以及连杆和滑块组成。该模型的运动形式为齿轮1为驱动轮,带动齿轮2转动,齿轮2于连杆偏心连接,带动连杆推动滑块直线反复运动。实质上是将齿轮的转动转化为滑块的平动。 图1-1 模型简图 2、启动ADAMS 2.1 在桌面点击ADAMS快捷键Adams - View x64 2013,或者Windows开始菜单启动:“开始”—“所有程序”—“MSC.Software”—“Adams x64 2013”—“A View”—“Adams-View”。 2.2 启动后出现Welcome欢迎窗口,如图1-1所示,点击New Model,出现Create New Model,Model Name为adams,Gravity为Earth Normal,Units为MMKS。 2.3 单击OK,进入ADAMS。
Matlab与adams联合仿真实例 本实例以matlab为外部控制程序,使用PID算法控制偏心杆的摆动,使偏心杆平衡到指定位置。 1.在adams/view中建立偏心杆模型 图1 偏心杆模型 1)新建模型 如图所示,将Units设置为MMKS。设置自己的Working Directory,这里设置为C:\adams\exercise。点击OK按钮。 图2 新建模型对话框 2)创建连杆 设置连杆参数为Length=400,Width=20,Depth=20,创建如图所示的连杆。 图3 创建连杆 3)创建转动幅 在连杆质心MARKER点处创建转动幅,旋转副的参数设置为1Location和Normal To grid将连杆与大地相连。
图4 创建转动幅 4)创建球体 球体选项设置为Add to part,半径设置为20,单击连杆右侧Marker点,将球体添加到连杆上 图5 创建球体 5)创建单分量力矩 单击Forces>Create a Torque(Single Component)Applied Forces,设置为Space Fixed,Normal to Grid,将Characteristic设置为Constant,勾选Torque并输入0,单击连杆,再点击连杆左侧的Marker点,在连杆上创建一个单分量力矩。 图6 创建单分量力矩
2.模型参数设置 1)创建状态变量 图7 新建状态变量 点击图上所示得按钮,弹出创建状态变量对话框,创建输入状态变量Torque,将Name 修改为.MODEL_1.Torque。 图8 新建输入状态变量Torque 再分别创建状态变量Angel和Velocity(后面所设计控制系统为角度PID控制,反馈变量为Angel,Velocity为Angel对时间求导,不需要变量Velocity,这里设置Velocity是为了展示多个变量的创建)。设置Angel的函数AZ(MARKER_3,MARKER_4)*180/PI,Velocity 的函数为WZ(MARKER_3,MARKER_4)*180/PI。(MARKER_3为连杆上的点,MARKER_4为地面上固定的点)AZ(MARKER_i,MARKER_j)表示MARKER_i绕MARKER_j的Z轴旋转的角度,WZ表示MARKER_i绕MARKER_j的Z轴旋转的角速度。
10悬架分析 (225) 10.1悬架模型参数调整 (225) 10.2悬架参数设定 (229) 10.3悬架仿真 (231) 10.4查看后处理结果 (233) 附例 (234) 224
《悬架分析篇》 10悬架分析 在ADAMS/Car下可进行的悬架分析包括: (1)车轮同向运动(Parallel wheel analysis) (2)车轮反向运动(Oppositel wheel analysis) (3)侧倾和垂直力分析(Roll and vertical forces)-悬架的侧倾角变化,同时保持作用于悬架的总垂直力不变,因此作用于左右车轮的垂直力会变化,导致左右轮心的位置改变。 (4)单轮运动(Single wheel travel)-一个车轮固定,另一个车轮运动。 转向(Steering)-在给定轮心高度下,在转向盘或转向机上施加运动。 (5)静态分析(Static load)-可以在轮心或轮胎印迹上施加载荷,如纵向力、侧向力、垂直力。 (6)外部文件分析(External file)-利用外部文件来驱动仿真。 1)载荷分析(Loadcase),文件中包含的输入可以是轮心位移、转向盘转角,或 者是作用力; 2)车轮包络分析(wheel envelope),车轮同向运动的同时,车轮发生转到,主 要是与CAD软件结合检查悬架、转向系等与车身的干涉。 10.1悬架模型参数调整 在前面第8章已经完成前悬架模块的装配,在子系统或装配体中质量、硬点、衬套、弹簧和减振器特性是可以修该的,以满足用户实际情况。 1)修改质量特性 在部件附近右击鼠标,在出现的清单里找到所要修改的部件,选择Modify。 出现如下窗口: 225
基于adams的凸轮机构运动仿真 摘要:虚拟样机技术是一种崭新的产品开发技术,其中ADAMS软件是目前最著名的虚拟样机分析软件之一。本文阐述了虚拟样机技术和ADAMS软件的特点及其应用,以凸轮机构为研究对象,对其进行动力学分析。主要运用我们学习过的机械原理等理论知识对机构进行运动学和动力学的相关理论计算;利用ADAMS软件在图形显示方面的优势,采用其基本模块ADAMS/View(界面模块)进行一系列建模、运动分析和动态模拟仿真工作,验证模型的正确性,并对机构在整个周期内的可行性进行计算分析,记录相应信息,输出所需要的位置、速度、加速度等曲线与理论结果比较,充分展现虚拟样机技术的优越性,为虚拟样机技术的深入研究打下基础。 关键词:ADAMS;凸轮机构;运动学分析;仿真 引言 凸轮机构的应用十分广泛,在生产机械中应用凸轮机构可以较容易的实现不同的工作要求。特别是实现间歇式的运动过程!但是,目前对于该类模型的动态仿真很少。本例主要就推程、回程等要求进行预设。力图通过adams实现对该凸轮机构的构建以及后续的仿真,并尝试进行一定的机构优化。 1.研究内容 这里,我主要研究内容为理论凸轮设计在adams中的设计及其动态仿真。后续,根据输出的相应的速度、加速度曲线等将进行一定的设计优化。力图真实还原凸轮机构在设计中的真实过程。 2.工作原理 凸轮机构是由凸轮,从动件和机架三个基本构件组成的高副机构。凸轮是一个具有曲线轮廓或凹槽的构件,一般为主动件,作等速回转运动或往复直线运动。通过对凸轮轮廓进行不同的设计,可以实现从动件不同形式的运动。以此来满足机械设计中对于运动的精细控制过程。 3.动力学建模 (1)建模前期准备 情景设想:某公司需要设计一凸轮机构实现对物料的间歇夹紧过程。其给出相应数据如下。 注:其他的暂 不作要求。 (2)设计
第11章 ADAMS二次开发及实例 ADAMS具有很强的二次开发功能,包括ADAMS/View界面的用户化设计,利用cmd语言实现自动建模和仿真控制,通过编制用户子程序满足用户的某些特定需求,甚至可以拓展ADAMS的功能。 本章主要介绍如何定制用户化界面、宏命令的用法和条件循环命令的用法,以及综合以上功能的应用实例。由于用户子程序的主要内容已在第9章进行了详细介绍,因此本章只对所涉及到的用户子程序编译联接操作过程进行简单介绍。 11.1 定制用户界面 ADAMS/View的界面对象都是以层次结构存储在模型数据库中,类似于零件模型的层次结构。所有定制的界面对象都存储在名为GUI的数据库中,该数据库可以很方便地管理所有的标准界面对象。如图11-1所示。 图11-1 界面对象的层次结构
机械系统动力学分析及ADAMS应用 最上层的界面对象是窗口和对话框。如果主要建模窗口起名为main的话,其数据库全名应为.gui.main。 尽管窗口和对话框看起来很相似,但它们却是很不相同的。窗口通常是在用户工作的时候在屏幕上停留一段时间,而对话框通常是在用户输入数据或是进行访问控制时才会出现。窗口有工具条和菜单栏,窗口和对话框也包含其他的界面对象如按钮,标签等等。 大多数用户化操作涉及到创建对话框或者修改标准对话框。但若不用创建一个完整的用户化界面时,则通常只用修改菜单条和工具栏。 ADAMS所包含界面对象属性如表11-1所示。 表11-1 ADAMS所包含界面对象属性
第11章ADAMS二次开发及实例 在大多数情况下,用户定制界面是指制作用户自己的菜单和对话框。通常可使用菜单编辑器和对话框编辑器来定制界面,通过它们可以很快地访问并改变大多数界面对象和功能。下面就这两方面的内容作简单介绍。 11.1.1 定制菜单 1。菜单编辑器 通过以下菜单路径可以调出菜单编辑器窗口: Main menu==》Tools==》Menu==》Modify…… 菜单编辑器窗口如图11-2所示: 图11-2 菜单编辑窗口 在菜单编辑器窗口中显示的是ADAMS菜单文件,菜单文件是按照一定的语法书写的解释性程序文件,在默认情况下,菜单编辑器窗口里显示的是描述ADAMS标准菜单的菜单文件,通过按照一定的语法规则修改该菜单文件,就可以得到用户化的菜单。
ADAMS大作业 姓名:柴猛
学号:20107064 目录 绪论 (1) 模型机构 (2) 模型建立 (3) 约束添
加 (9) 运动添加 (11) 模型仿真 (14) 小结 (17) 参考文献 (17)
绪论 大型旋挖钻机是我国近年来引进、发展的桩工机械, 逐步取代了对环境污染严重、效率低下的其它建筑工程桩孔施工机械。旋挖钻机的钻桅变幅机构对整机布局和操纵稳定性影响很大, 它是实现钻孔位置变化及改变钻桅位置状态的关键部件。钻桅是旋挖钻机主执行机构的重要支撑, 其为钻具、调整机构、加压系统等提供结构支撑, 整个桅杆对于保证整机的正常运行和工作质量起着至关重要的作用。 旋挖钻机主要是运用于灌注桩施工,功能为钻孔。而在当今灌注桩施工中旋挖钻机具有优于其它方式的优点: 1.钻井效率高; 2.成孔质量好; 3.环境污染小。 本文主要是对旋挖钻机的钻桅举升装置进行运动仿真分析。
模型机构 钻桅举升装置主要由钻头,钻杆,变幅机构,桅杆以及油缸组成, 工作过程:对孔,下钻,钻进,提钻,回转,卸土六个主要步骤。 对孔:为了保证钻桅的垂直度,采用了平行四边形平动机构,并结合液压杆及回转机构完成孔的定位; 下钻:由于钻具质量大,应控制其下降速度,将钢丝绳与钻杆通过回转接头连接,采用卷扬提升系统控制钻具的升降;钻进:通过动力头驱动扭矩并传递给钻杆,再由钻杆传递给钻钭以实现钻进;提钻:与下钻具有相同的控制系统和运动过程; 回转:由回转机构完成;卸土:通过卷扬系统和连杆的旋转来完成。
模型建立 把实际模型按比例缩 小 一.底座 因为底座不参与运动分析,所以可以用方块代替底座:
一.ADAMS软件简介 虚拟样机仿真分析软件ADAMS(Automatic Dynamic Analysis of Mechanical Systems)是对机械系统的运动学与动力学进行仿真的商用软件,由美国MDI (Mechnical Dynamics Inc.)开发,在经历了12个版本后,被美国MSC公司收购。ADAMS集建模、计算和后处理于一体,ADAMS有许多个模块组成,基本模块是View模块和Postprocess模块,通常的机械系统都可以用这两个模块来完成,另外在ADAMS中还针对专业领域而单独开发的一些专用模块和嵌入模块,例如专业模块包括汽车模块ADAMS/Car、发动机模块ADAMS/Engine、火车模块ADAMS/Rail、飞机模块ADAMS/Aircraft等;嵌入模块如振动模块ADAMS/Vibration、耐久性模块ADAMS/Durability、液压模块ADAMS/Hydraulic、控制模块ADAMS/Control和柔性体模块ADAMS/AutoFlex等[3]。 1.1ADAMS软件概述 ADAMS是以计算多体系统动力学(Computational Dynamics of Multibody Systems)为基础,包含多个专业模块和专业领域的虚拟样机开发系统软件,利用它可以建立复杂机械系统的运动学和动力学模型,其模型可以是刚体的,也可以是柔性体,以及刚柔混合体模型。如果在产品的概念设计阶段就采取ADAMS 进行辅助分析,就可以在建造真实的物理样机之前,对产品进行各种性能测试,达到缩短开发周期、降低开发成本的目的。 ADAMS,即机械系统动力学自动分析(Automatic Dynamic Analysis of Mechanical Systems)该软件是美国MDI公司(Mechnical Dynamics Inc.)开发的虚拟样机分析软件。目前,ADAMS已经被全世界各行各业的数百家主要制造商采用。根据1999年机械系统动态分析软件国际市场份额的统计资料,ADAMS 软件销售总额近八千万美元、占据了51%的份额。 ADAMS软件使用交互式图形环境和零件库、约束库、力库,创建完全参数化的机械系统几何模型,其求解器采用多刚体系统动力学理论中的拉格朗日方程方法,建立系统动力学方程,对虚拟机械系统进行静力学、运动学和动力学分析,