第六章評估
了解軟體的使用範圍與限制是相當重要的。光學系統設計一個重點是光束覓跡(ray tracing)。在光束覓跡中,必須釐清輸入及輸出數據的含意。而分析結果是經由一些評估指令來完成(例如斑點圖(spot diagram),它包含了與光束覓跡相關的可量測量之模型,而徑向能量分佈(radial energy distribution)或調變傳遞函數(modulation transfer functions)也是相當重要的分析。要將這些指令使用得
漓盡致,不僅是要把系統設定(如孔徑大小等)弄對,還必須使用足夠數量的光束以便適切地表達出整個系統的效能。不適切的輸入或者使用的評估超出分析模型的適用範圍,計算結果未必有意義。
在這一章裡主要介紹OSLO各個分析的基本輸入條件及數據輸出的意義。
6-1 系統數據(System Data)
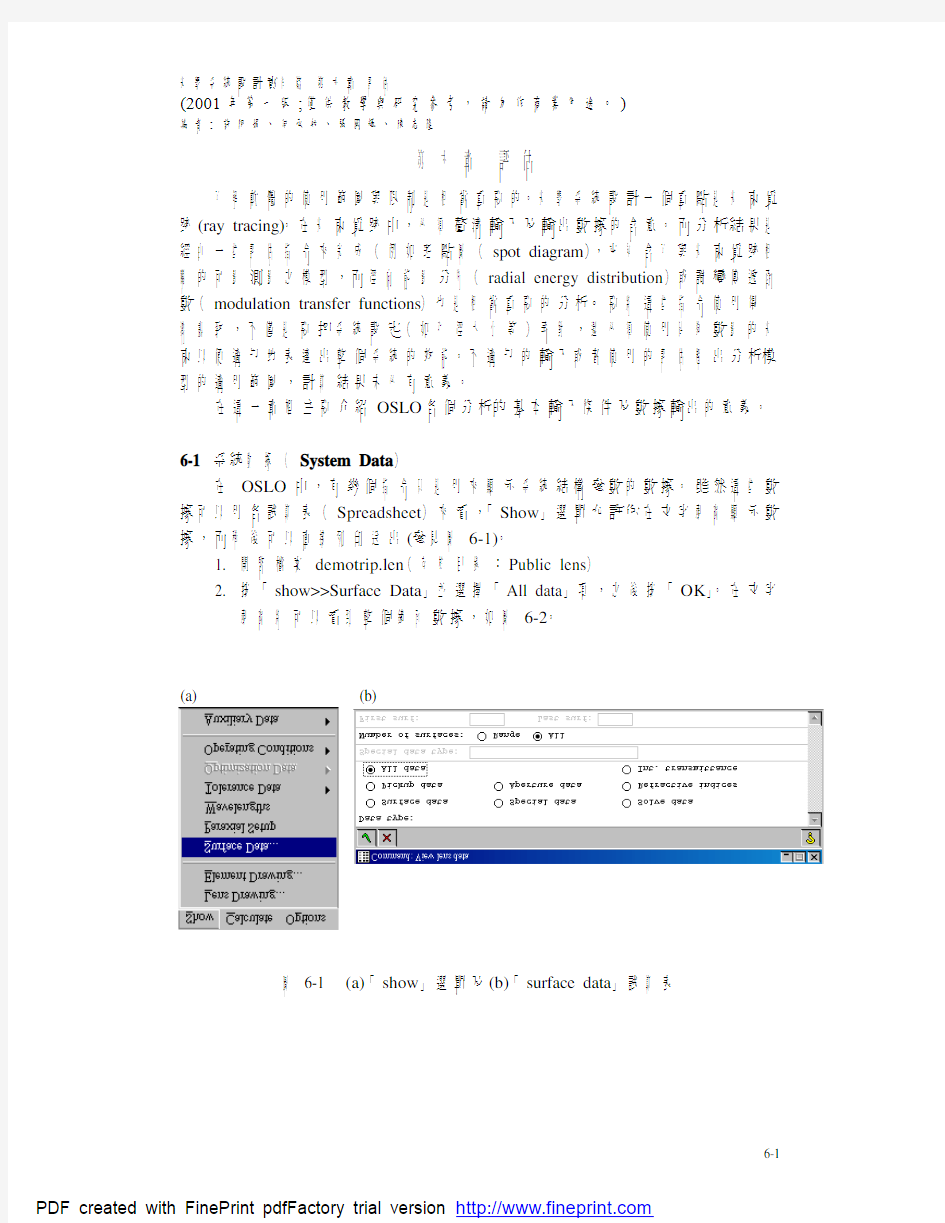
在OSLO中,有幾個指令只是用來顯示系統結構參數的數據。雖然這些數據可以用各試算表(Spreadsheet)來看,「Show」選單允許你在文字視窗顯示數據,而稍後可以直接列印送出(參見圖6-1)。
1. 開啟檔案demotrip.len(存於目錄:Public lens)
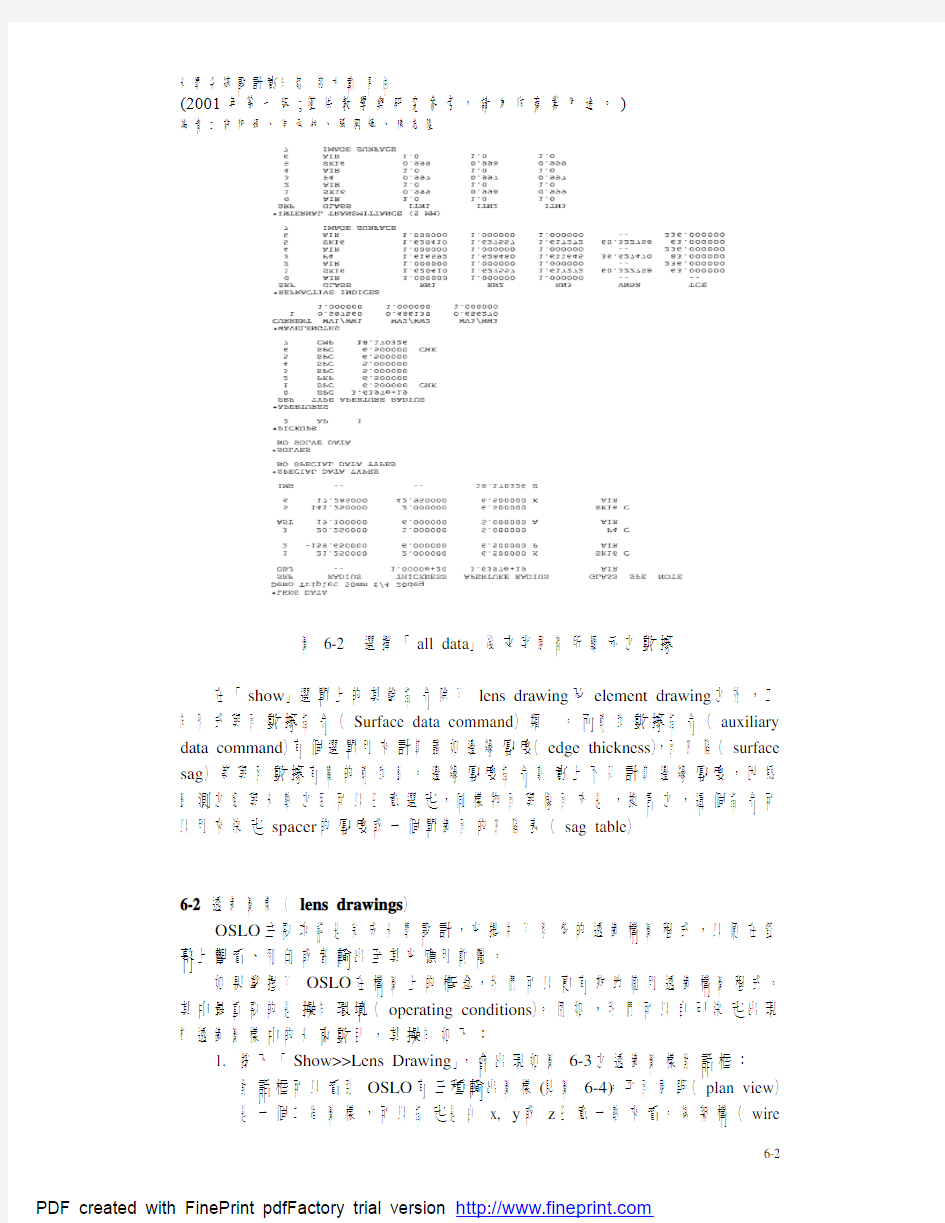
2. 按「show>>Surface Data」並選擇「All data」項,之後按「OK」。在文字
視窗將可以看到整個鏡面數據,如圖6-2。
(a) (b)
圖6-1 (a)「show」選單及(b)「surface data」試算表
圖6-2 選擇「all data」後文字視窗所顯示之數據在「show」選單上的其餘指令除了lens drawing及element drawing之外,工作形式與面數據指令(Surface data command)類。而輔助數據指令(auxiliary data command)有個選單用來計算諸如邊緣厚度(edge thickness),面凹陷(surface sag)等與面數據有關的輔助量。邊緣厚度指令事實上不只計算邊緣厚度,因為量測之處與光軸之距可以任意選定,同樣物面與像面亦是,換言之,這個指令可以用來決定spacer的厚度或一個單鏡面的凹陷表(sag table)
6-2 透鏡圖樣(lens drawings)
OSLO主要功能是完成光學設計,它提供了眾多的透鏡構圖程式,以便在螢幕上觀看、列印或者輸出至其它應用軟體。
如果掌握了OSLO在構圖上的概念,我們可以更有效地使用透鏡構圖程式。其中最重要的是操作環境(operating conditions)。例如,我們可以自己決定出現於透鏡圖樣中的光束數目,其操作如下:
1. 按下「Show>>Lens Drawing」,會出現如圖6-3之透鏡圖樣對話框:
對話框可以看到OSLO有三種輸出圖樣(見圖6-4)。平面視野(plan view)
是一個二維圖樣,可以指定是由x, y或z任意一軸來看。線架構(wire
frame)及立體模型(solid model)圖樣則是三維立體圖樣,而前者以孔
徑,子午(meridional)及緯(sagittal)線畫出,後者則是會以更立體的方式表
現出來。平面視野及立體模型可以用「SHIFT+F1」及「SHIFT+F2」快
速鍵去執行。
圖6-3 透鏡圖樣對話
(a)
(b) (c)
圖6-4 (a)平面視野圖樣圖(b)線架圖樣圖及(c) 立體模型圖樣圖
2. 按下對話框的左下角「Operating conditions」,則會出現更新透鏡圖樣設
定(update lens drawing operating conditions)試算表。(這個試算表也可以經由更新選單(Update menu)得到)
在試算表中大多數項目提供進階控制。然而像光束扇形(ray fans)的物點數目(number of field points)及整個光束圖的各個數據表是不斷地改變以便對某一透鏡作分析了解。初始及最後距離也是常變來變去以便顯示物面與像面之間的軌跡。
透鏡圖樣的各個特性可以用「demotrip.len」的一個伸版本來解說。在此版本中放大倍率設為「-1」。
3. 關閉透鏡圖樣試算表,並開啟「demotrip.len」檔案。然後開啟透鏡面數
據試算表,並修改透鏡數據如下:
l 改變透鏡名字(id)為「Triplet with –1 magnification」
l 按下「Draw On」去啟動自動圖樣功能
l 開啟近軸數據試算表(Paraxial data Spreadsheet)並在Conjugate下的放大率項(magnification field)鍵入「-1」(圖6-5)。關上試算表並回到面數據試算表,此時可以看到th[0]及th[6]已經改變。
圖6-5 修改放大倍率
l 在自動圖樣視窗可以看到最上及最下方邊緣光束並沒有通過最後一個元件。此時可以改變面5及面6的孔徑為7.0。如此最上方及最下方的邊緣光束就可以通過最後一個元件,此時,自動圖樣及數據試算表應如圖6-6及圖6-7:
(b)
(a)
圖6-6 修改放大倍率後之圖樣圖(a)及面數據(b)
圖6-7 修改面5及面6之孔徑大小後之圖樣圖
這個例子說明了孔徑檢查的效果,需注意的是即使光束是在曲面孔徑之外,光束的最上及最下方邊緣仍會通過負元件。這是因為沒有設定啟用「孔徑檢查」,換句話說,如果沒有設定「孔徑檢查」的話,光束就不會通過
面
7,除非增加孔徑到7.0。
接下來,假定你要使透鏡圖樣得以顯示從物面到像面的所有光束,其操作如下:
4. 按下「Update>>Operating Conditions>>Lens Drawings 」,在初始距離項
「Initial distance field 」輸入th[0],而最末距離項「Final distance field 」輸入th[6](現在你可以用代數式來代表透鏡數據)(圖6-8),並按下「OK 」以關閉試算表並回到面數據試算表,現在自動圖樣視窗如圖6-9所示:
圖6-8 修改最初及最末距離
圖6-9 修改最初及最末距離之圖樣圖
現在,假設我們想要顯示整個光暈光束 (vignetted beam),而不是只有離軸主線(chief ray off axis ),則動作如下:
5. 執行指令「User>>Check Vigntting 」,按下「Enter 」接受預設的場點(field point )「1.0」(圖5-38)。此時文
所示:
圖6-10 檢查光暈(vignetting)的指令操作
圖6-11 檢查光暈(vignetting)指令操作後顯示之文字視窗
這個指令顯示了由物點邊緣(edge of the field )離開的最上方及最下方光束所需的孔徑大小(fractional aperture )。
6. 按下「Update>>Operating Conditions>> Lens Drawing 」並設定第二個場點(field point )的光束數目為3,並將此一場點的最小瞳孔(Min Pupil)改設為-0.508,而最大瞳孔(Max Pupil)改成0.619(圖6-12)。關閉試算表,如此最後自動圖樣如下(圖6-13):
圖6-12 修
改第二個場點
之光軸
數及瞳
孔(pupil)的最大、最小值。
圖6-13 加入第二個場點光束軸之圖樣圖
7. 最後一個步驟,就是另存新檔,再另開新檔,其動作為按「File>>New 」(注意此時必須關閉面數據試算表),並接受設定值,然後按「OK 」。之後重新開啟透鏡檔案,注意此時自動圖樣視窗顯示了我們所設定的新光束。按下「Draw lens toolbar icon 」(或者SHIFT+F1),會出現如自動圖樣視窗一樣的草圖。按下「Solid model toolbar icon 」,則會顯示三維空間實體
模型以及內定光束。
由於在OSLO中初始及最末距離值都是內定為0,所以改變初始及最末距離值是有必要的,以免誤入陷阱。我們用拋物鏡面作示範:
1. 關閉鏡面數據試算表,按下「File>>New」,並輸入「paratest」作為檔名,
設定面數為「1」,然後按「OK」,之後面數據試算表會被開啟。
2. 選用「Draw On」啟動自動圖樣。
3. 輸入入射光束半徑為20。
4. 設定鏡面1的玻璃種類,自選項表中選用「Reflect(反射)」。
5. 按下鏡面1的特殊鍵(Special button),從自動選單中選用「Polynomial
Asphere>>Conic/Toric」並就Conic參數輸入「-1」值(圖6-14),然後關
閉整個試算表。
圖6-14 更新Conic/Toric面數據
6. 輸入曲率半徑為「-10」,厚度為「-5」,孔徑設為「20」,因為一個圓錐
(Conical)鏡面其焦距為曲率半徑的一半,所以像面為鏡面2,參見圖6-15。
圖6-15 面數據更新
現在按下「Update>>Operating Conditions>>Lens Drawing」並改變場點數
為1,而自場點發出的光束為11,設Min Pupil =0而Max Pupil為1(圖
6-16(a)),然後關掉試算表,則自動圖’樣視窗會顯示如圖6-16(b)。此時
我們將發現有異常的光線軌跡,這是因為初始及最後距離都是內定值,
而其值皆為0.0。這個設定對大部份的透鏡系統而言,因為內定值0,通常是初始及最後孔徑的10%;所以可以用,但對反射器是不適合。
(a)
(b)
圖6-16 (a)只修改瞳孔(pupil)大小而未修改最初及最末距離之試算表及
(b)圖樣圖
按下「Update>>Operating Conditions>>Lens Drawing」改變最初距離為30.0,最末距離為 5.0,關掉試算表,此時自動圖樣視窗如下(圖6-17):
圖6-17 改變最初及最末距離後之圖樣圖
情況已改善了,但仍有遺漏的光束。整體看來遺漏的光束走的幾乎是垂直軌跡。我們可以檢查數值數據,用來作進一步的確認。檢驗數值數據動作如下:執行「Calculate>>Setup Object Point」,且令物座標(object coordinates)值為0.0。
圖6-18 設定物座標
按下「Calculate>>Ray Analysis」。在對話框上選定列出「Print y ray fan」,設定「Minimum fractional y component of pupil coordinate」值=0,「Maximum」為1,定光束數為11(圖6-19),這樣子的設定是跟作圖樣的設定一致,然後關閉對話區(按OK)。而在文字視窗會出現下列數據(圖6-20)。
圖6-19 「ray analysis」對話框數值設定
圖6-20 光束覓跡之數據
在上圖數據中「1.0000e+20」值顯示光束覓跡敗,很明顯的,光束自鏡面反射以正90度離開,以致於無法與像面交會。為了解決這個繪圖上的問題,一個作法是將光束數從11變成10(Update>>Operating Conditions>>Lens Drawing)。
圖6-21 光束數由11改成10後之圖樣
圖
上述例子說明了使用OSLO畫設計圖樣的一些重點。首先當你的結果看起來比較不尋常時必須作一些實驗,驗證一下以得到比較適當的結果,第二件事OSLO基本上仍是一個數值模擬的軟體,這些數值則提供了繪圖所需的依據。所以一旦圖形有些異常,就應該去檢查數值,事實上這也是為什麼在OSLO中需要圖形與文字輸出。這樣子可以提供一個有效的直觀的方式去檢查數值模擬結果。
6-3 近軸光學(Paraxial Optics)
雖然在OSLO中用來明確地顯示近軸光束數據的指令只有二個:一是paraxial_trace,另一則是paraxial_constants,其數據卻提供了一個光學系統中最重要的效能評估。值得注意的是在一個有像差的系統,近軸行為提供了系統效能的一階近描述。事實上,一個光學設計過程的目的經常是讓有像差的光束走的是近軸光學近路徑。
近軸光學只適用於軸對稱系統,亦即在此系統中有光軸。如果系統會有歪斜(tilted)或偏心(decentered)元件,近軸計算會忽視歪斜與偏心元件的存在。同樣地,如果系統含有其它特殊元件,如全像(holographic)或梯度變化折射率(gradient index),這一
真正的近軸光束是無窮小地靠近光軸。在作光束覓跡時,我們使近軸光束自光軸位移一個大的量,而且在曲面的切平面上偏折(如圖6-22)。近軸光學通常被視作「線性」,換言之,如果追蹤兩個基準光束(例如軸光束及主光束),則任何其它近軸光束的軌跡都可以由這兩個基準光束的高度及斜率的線性組合來表示,而這些組合的係數在系統中的任一點都不變。
近軸光束覓跡有個主要特徵,就是我們永遠找得到光束。即不論鏡面的曲率是多少,我們永遠可以用光束的高度及斜率來表示它。在OSLO中,近軸軸光束高度、光束斜率及入射角是用PY,PU和PI來表示。而近軸主光束(chief ray)是用PYC,PUC和PIC表示。軸光束又稱作a光束(a-ray)或邊緣光束(marginal ray),它是一個自物面中心到近軸入射瞳孔(paraxial entrance pupil)邊緣的光束。
而主光束(chief ray )又稱作b 光束(b-ray )或principal ray ,是自物面的邊緣出發連到入射瞳孔的中心。近軸光束的數據是藉由paraxial_trace (pxt )指令去計算並顯示。
一旦執行pxt 指令,OSLO 會算出七個所謂近軸常數(paraxial constant ),而了解這些常數所代表的意義是相當重要的。在下面我們以「demotrip.len 」檔案的修正版作為範例討論。
1. 打開「demotrip.len 」檔案,按下「Update>>Paraxial Setup 」,修改以下數據(參見圖6-23)
magnification = -0.5
Gaussian image height = 25 Object N.A.= 0.5
接下來,打開面數據試算表並改變面2和4厚度,由6變成60.0。
圖6-23 Paraxial Setup 參數設定
2.按下「Calculate>>Paraxial 」選擇近軸光束覓跡(Paraxial ray trace )並按下「OK 」(參見圖6-24)。重複步驟,選用近軸常數(Paraxial constant )。文字視窗應該含有下列輸出(圖6-25)。
圖6-24 光束覓跡設定
Gassian image height
Objevtive N.A
圖6-25 paraxial ray tracing 與 paraxial constants 數據
上表數據有幾個有趣的特點。第一是軸光束的高度在第一個鏡面上是78.8mm ,遠大於鏡面的曲率半徑。基本上不可能在這個系統上畫出真實光束的,但是數據是近軸光學,所以這點並不是那麼重要。
依照一般定義,等效焦距是第二主點(second principal point )到焦點(focal point )的距離。
因為依照輸入的物面之數值孔徑(object N.A.)0.5,放大率為-0.5之故,所以系統的數值孔徑(N.A.)設為 1.0。但是這裡有個值得我們注意的地方,數值孔徑(N.A.)是用軸光束角的正弦值(sin)來定義,而近軸軸光束的斜率是用其角的正切(tangent )來定義。所以一旦物體數值孔徑是0.5,則在物面的軸光束其角是30度,所以近軸光束斜率是tan (30 0)=0.57735。
為了計算在像空間(image space )的數值孔徑,我們必須對光學系統作些假設。OSLO 假設整個系統是等光程的(aplanatic )。所以在像空間中的數值孔徑必須等於物體數值孔徑除以放大率。在我們現在這個例子中是 1.0。換言之從系統出來的真實光束角度將是90度。
根據OSLO 對於近軸常數的定義,我們可以設計一個數值孔徑大於 1.0的系統,就現在這個例子而言,這代表系統不是等光程的(aplanatic )。Working -f-number 定義作
.
.*21
A N 。如同上面所述,我們也可以設定一個working -
f-number 小於0.5的系統(非等光程的(non-aplanatic )。
很明顯可以從上面討論看出真實光束光學與近軸光學的基本差異,近軸模型
事實上並
不是對應到一個完美的透鏡,而只是一個完美透鏡的一階近。 高斯成像高度(Gaussian image height )是主光束在近軸像平面的高度。在這個範例中,一旦系統離開焦點,則高斯成像高度並不等於主光束在像平面上真實的成像
的高度。
匹茲保半徑(Petzval radius)是由鏡面曲率及折射率算出,嚴格而言
,它不是
一個近軸常數。匹茲保曲率(Petzval curvature)(
PTZRAD
.1)可以用來作為透鏡複
雜度的指標。匹茲保半徑(Petzval radius)與焦距長的比值有時稱作匹茲保比例(Petzval ratio)。就單一薄透鏡而言,匹茲保比例(Petzval ratio)就是該透鏡的折射率。
上述近軸常數是對聚焦系統(focal system )作計算。對一個非聚焦系統(afocal system )而言,角放大率(angular magnifications )、眼點距(eye relief )、近軸不變量(paraxial invariants )以及Petzval 半徑一樣可以被計算。
不同波長的近軸數據,都可以先行設定波長後再執行近軸計算指令。必須注
意的是計算求解是針對波長1而定。如果系統含有特定數據,則其近軸數據是將真正光束在一個很小的孔徑(例如FY=0.0001)的計算結果轉換(Scaling the resulting ray data )而得。OSLO 有兩個星指令(*pxt 及*pxc )可以作此分析。這些指令亦被放在「User>>General Analysis 」選單上作為一階光束覓跡及一階常數
計算之用。
6-4 像差(Aberrations )
像差理論是用多項式近來考慮光學成像的不全之處或者距理想成像點的光束偏移量或理想參考球面的波前偏移量。我們可以利用物及瞳(Object and pupil )的座標多項式展開定義像差。由像差理論所作的預測其準確度是依照多項式的展開次數及所研究的系統而定。
OSLO 計算三類像差:色差(chromatic )、席德爾像差(Seidel )及第五階像差(fifth-order aberrations )。而球面像差被計算到第七階。席德爾像差量由軸光束(影像像差image aberrations )及主光束(曈孔像差,pupil aberrations )得到。而第五階像差可以用Seidel 或者Buchdahl 格式(format )表示。
只有用近軸光束數據才可以把像差給算出。換言之,一個系統的像差是可以先行分析而不必管是否有光通過其中。因此,像差理論可以用來研究設計的一般特性乃至於初步最佳化。不論系統如何改變,總是可以把系統像差係數對結構參數的偏移量給計算出來。
在OSLO 中,近軸色差(paraxial chromatic)叫做PAC 及PLC 分別代表主要軸向色差(primary axial color)及主要橫向色像差(primary lateral color)。而SAC 及SLC ,在OSLO 中分別代表次要軸向色差(secondary axial color)及次要橫向色差(secondary lateral color)。這兩種的差別在於使用波長的不同,所以PAC 及PLC 是波長2和3的色差,而SAC 及SLC 則是波長2和1的色差。在OSLO 中,中
間波長定作1,短波長叫做
2,長波長叫做3。
所有色差是用波長試算表(wavelength spreadsheet )的波長來算,如果你想計算不同波長的Seidel 像差
,那麼就必須在計算波長之前改變設定。
像差結果的詮釋對光學系統設計相當重要,在大多數的光學教科書已有詳述,在此不再重述。OSLO 的各式像差指令可以在「Calculate>>Aberrations 」選
單
上找到。(參見圖6-26)
圖6-26 各像差指令選單
6-5 光束覓跡(Ray Tracing )
光束覓跡提供嚴謹結果,不像像差理論只是提供光學系統的近評估,但是
像差理論可以適用所有孔徑及場點,而光束覓跡只是追蹤特定的光束。加果被追蹤的光束是具有代表性的,則光束覓跡對系統的特性及效能評估將非常有用。我們不需繁雜的計算就可得到很有用的結果。因此在實際的光學系統設計上,光束覓跡比像差理論還常用。
在光束覓跡裡用的基本觀念是光的能量沿著光束流動,所以決定了光束的軌跡,則我們可以定出在系統中能量流經的路徑。在細節上,這個觀念由於光束沒有寬度所以有些問題、能量必須想成由一束光所構成。無論如何,這個簡化想法對大多數系統都成立。
很重要的一件事是光束覓跡也被用來計算波前傳播上。要計算系統的波前傳播,OSLO 定出從一個物點出發到孔徑上不同位置的光束,然後定出沿著光束上等光程(optical path length )的點。通過這些點的面(與光束方向正交)就是波前(wave front )。一旦波前在像空間被建立,就可以算出繞射效應並用以評估影
像
及討論物理光學。
OSLO 提供幾個指令去追蹤通過系統的歪斜線(Skew rays ),並顯示數據結
果。在OSLO 中,大多數的光束覓跡是先設定一個物點,然後定出自這一點所發出的所有光束直到建立一個新的點。為了要指明通過系統的參考光束,我們必須指明物點的座標系,通過一些參考面的光束座標及光束所用的波長。在OSLO 中物點是藉由SOP (Setup object Point )指令定出(存於「Calculate 」選單),而顏色(color )是由目前使用中的波長指定,這可以用「Calculate 」選單中的Setup Wavelength 指令來完成。一旦選定一個物點,光束可以自物點通過鏡面(參考面RFS )指定的一點,此光束即參考光束(reference ray )。藉由參考光束之定跡,數據可以定出供稍後使用。一般而言,參考面是選用孔徑闌(aperture stop ),而參考光束用的是通過此參考面中心的主光束。但為了一般性,OSLO 允許使用者選定任一面作為參考面,並且允許參考光束通過在面上選定的任何一點。
如果參考面是內部曲面,則所追蹤出的參考光束的軌跡是由一個反覆步驟來強迫參考光束通過參考面上給定的座標(通常是參考面中心)。在此,應該注意的是真正光束覓跡的目的,光束其實是針對此物點為中心通過參考光束與面1交點的球面來定。這個球被稱作入射球面(entrance sphere )。
圖6-27說明參考光束的定義。圖6-27(a)是一個正常系統,參考光束通過孔徑闌(aperture stop )的中心,而其在物空間的伸則通過近軸入射瞳孔(paraxial entrance pupil )的中心;圖6-27(b)則是一個有大瞳孔變形(large pupil distortion )的系統,光束通過孔徑闌(aperture stop )的中心,但是它在物空間的伸並沒有通過入射瞳孔(entrance pupil )的中心,則此類系統明顯的瞳孔(pupil )位置是依視角(field )而改變。因為參考光束是反覆計算得到的,所以可以自動得到這個瞳孔移位(pupil shift )。
(a) (b)
圖6-27 參考光定義說明圖
孔徑
闌射瞳孔
參考光線
「set_object_point」指令需要使用者指明物點在相對於物高OBH比例座標(fractional coordinates)FBY,FBX和FBZ值。如果參考光束在參考面上座標不為零,則必須給定這些座標。
物點應是在一有轉動對稱性系統的Y軸上,而程式設定YZ平面為子午面(meridional plane),只有在分析無對稱性系統的時候才使用離面物點(out-of-plane object)。作斑點圖時要用的兩倍數目的光束是定義一個離面物點的結果所得到的(OSLO會自動處理),其操作步驟如下:
1. 打開「demotrip.len」檔案,按下「Calculate>>Setup Object Point」,在對話區
上設FBY=1.0,如此物點將在視野邊緣(edge of the field),按下「OK」(見圖6-28),關閉對話區而文字視窗將有下列輸出:
(a)
(b)
圖6-28 (a)設定物點對話框及(b)文字視窗顯示之數據
由指令「set_object_point」產生的數據包括光束在參考面及入射球(entrance sphere)的座標(FYRF, FXRF),(FY,FX)。當啟用近軸光束描光法時,這些點互相共軛而且其值為零,但若是啟用等光程面光束描光法(aplanctic ray aiming),這些值就不再是零。其它由此「set_object_point」指令產生的數據還有光束在像平面的高度(YC,XC)、在Y和X方向凹陷量(Y and X field sags)(YFS,XFS)及自入射球面到像空間光束的光程OPL。參考球半徑一般等於從射出瞳孔(exit pupil)到像面的參考光束所走的距離。
對於聚焦系統(focal system)而言,場凹陷(field sag)是描述像的凹陷程度,亦即在xz及yz平面上的差量焦點1(differential focus)到像面間平行於z 軸的距離(差量焦點即是差量光束與主光束的焦點)(參見圖6-29)。對非聚焦系統(afocal system)場凹陷是由屈光度(diopter)所定。
圖6-29 場凹陷示意圖
一旦物點(field point)被指定,平常光束(亦即指向入射瞳孔(entrance pupil)的光束)就可以被追蹤作系統評估。光束覓跡是由所在的比例物點(fractional object point),所用波長及在入射球上的比例座標(fractional coordinates)FY和FX,在這裡的FY和FX座標是跟光束在物空間(object space)的方向餘弦成比例,而不是方向正
圖6-30 FY、FX、FBY及FBX示意圖
「光束覓跡(trace_ray)」指令是用來定出通過系統的單一光束並顯示其所有或部份的數據。從「trace_ray」指令出來的標準輸出包含光束在每個鏡面上的座標值(x,y,z),光束角值YANG和XANG(以度為單位),以及沿著光束從前一鏡面到目前鏡面的距離值D,整個全部輸出除了前面項目外還包括方向餘弦、入射角IANG與折射角RANG(以度為單位)以及從入射球到目前鏡面的光程,如圖6-31所示。
圖6-31 光束覓跡指令之各項目圖示
接下來是在鏡面6光束的數據,對demotrip.len 例子而言,光束是由入射球的中心開始定跡到邊緣(Calculate>>Trace Ray)。我們把相關資料顯示在圖6-32。
圖6-32 光束覓跡指令操作對話框及顯示數據
D
(X,Y,Z)
(K,L,M)
YANG
RANG
IANG
课 程 设 计 光学显微镜设计 设计题目 学 号 专业班级 指导教师 学生姓名 测量显微镜
根据学号得到自己设计内容的数据要求: 1.目镜放大率10(即焦距25) 2.目镜最后一面到物面距离110 3.对准精度1.2微米 按照实验步骤,先计算好外形尺寸。然后根据数据要求选取目镜与物镜。 我先做物镜。因为这个镜片比较少。按物镜放大率选好物镜后,将参数输入。简单优化,得到比较接近自己要求的物镜。 然后做目镜,同样的做法,这个按照焦距选目镜,将参数输入。将曲率半径设为可变量,调入默认的优化函数进行优化。发现“优化不了”,所有参数均没有变化。而且发现把光源放在“焦点”位置,目镜出射的不是平行光。我百思不得其解。开始认为镜头库的参数可能有问题。最后我问老师,老师解释,那个所谓的“焦点”其实不是焦点,我错误的把“焦点”到目镜第一个面的距离当成了焦距。这个目镜是有一定厚度的,不能简单等效成薄透镜。焦点到节点的距离才是焦距。经过老师指点后,我尝试调节光源到目镜第一面的距离,想得到出射平行光,从而找到焦点。但这个寻找是很费力气的,事倍功半。老师建议我把目镜的参数倒着顺序输入参数。然后用平行光入射,然后可以轻松找到焦点。 但是,按照这个方法,倒着输入参数,把光源放在无限
远的地方(平行光入射),发现光线是发散的。不解。还是按照原来的方法。把光源放在目镜焦点上,尽量使之出射平行光。然后把它与优化好的物镜拼接起来。后来,加入理想透镜(会聚平行光线),加以优化。 还有一个问题,就是选物镜的时候,发现放大倍率符合了自己的需求,但工作距离与共轭距,不符合自己的要求。这个问题在课堂上问过老师,后来经老师指点,通过总体缩放解决。 物镜参数及优化函数
1. 购物系统的需求分析和类划分 购物系统本身是一个十分复杂的系统,有很多细节问题如果深究会更加复杂,并且一般购物系统都是网页类型的,要有一个友好的界面,但是作为一个简单项目,该项目只是为了给JAVA初学者介绍一下开发的基本思想,以及面向对象时应该怎样去设计框架和实现流程,所以只
是基于eclipse开发的一个简单的项目,并没有GUI的参与,并且很多细节问题作为后续研究,整体的设计比较简单,但是足以说明很多设计思想和设计理念,那么下面对基本的需求进行分析。 作为一个简单的购物系统,至少需要具备以下功能(这些功能分布在不同级的菜单中): (1)用户登录功能、用户账号密码修改功能,暂时不提供注册功能; (2)用户成功登录后,需要具备客户信息的管理功能、购物结算功能以及一些抽奖活动等; (3)客户信息管理功能下面又可以分出很多功能,比如说:查询、修改、增加等; (4)购物结算功能下面又可以分出很多功能,比如说:商品选购、付款、账单等; (5)抽奖活动下面又可以设计出多种的抽奖形式,从而进一步划分为许多新的功能模块。 (6)在一级菜单中要提供退出系统的功能,在二级菜单中要提供注销登录的功能,其他级菜单都要能够返回上一级菜单。 上面的这些功能都是一些比较基本的功能,那么如果按照面向流程的思想来设计,就会划分很多功能模块,然后按照流程一步步走就行,但是现在我们采用面向对象的思想来设计,那么应该如何考虑设计框架呢?面向对象的主要思想就是将一些需求抽象为许多类,然后建立这些
类之间的联系,通过不同类之间的协同合作,就可以实现所有的功能。所以,现在的主要任务就是如何合理地抽象出这些类,以及这些类要实现什么功能,类之间的联系又是什么?下面通过本次设计的结构对这一过程进行分析。 (1)StartSMS类:用于系统的启动。我们的系统肯定需要一个启动类,这个类里面包含了main方法,用来启动这个系统,这个类是最顶层的,所以不能牵涉太多底层的细节实现,只需要实现一些顶层的基本流程就行,主要还是要调用底层其他类的一些方法来实现功能。 (2)Data类:用来存放我们的所有数据信息,本次设计主要存放的是已经预存的一些可供购买的商品信息和已经注册的会员信息。为什么需要这个类呢?大家想一想,在面向对象的设计中,我们的数据比较多,肯定不能零散地到处定义、任意修改,这样会使得系统的聚合程度太低,容易出现很多错误,并且难以进行后期功能扩展和错误修改,所以我们要把用到的一些公有的数据进行归类,然后放在一个类中,并且在该类中提供对这些数据进行操作的方法。 (3)Menu类:用于显示及处理各级菜单。既然我们设计的是一个购物系统,那么即使再简单,也需要一个基本的菜单,用来和用户进行交互,由于菜单的比较多,并且各级菜单之间层层相连,所以我们需要对菜单进行统一管理,故而出现了菜单类。注意,这里的菜单只是一些顶层的菜单显示和基本的功能调用,具体底层的算法还是需要更加底层的类来实现的。
基 础 光 学 实 验 姓名:许达学号:2120903018 应物21班
一.实验仪器 基础光学轨道系统,基础光学组合狭缝及偏振片,红光激光器及光圈支架,光传感器与转动传感器,科学工作室500或750接口,DataStudio软件系统 二.实验目的 1.通过该实验让学生了解并会运用实验器材,同时学会用计算机分析和处理实验数据。 2.通过该实验让学生了解基本的光学现象,并掌握其物理机制。三.实验原理 单缝衍射:当光通过单缝发生衍射,光强极小(暗点)的衍射图案由下式给出asinθ=mλ(m=1,2,3……),其中a是狭缝宽度,θ为衍射角度,λ是光波波长。 双缝干涉:当光通过两个狭缝发生干涉,从中央最大值(亮点)到单侧某极大值的角度由下式给出dsinθ=mλ(m=1,2,3……),其中d是狭缝间距,θ为从中心到第m级最大的夹角,λ是光波波长,m为级数。 光的偏振:通过第一偏振器后偏振电场为E0,以一定的角度β穿过第二偏振器,则场强变化为E0cosβ,由于光强正比于场强的平方,则,第二偏振器透过的光强为I=I0cos2β. 四.实验内容及过程
单缝衍射 单缝衍射光强分布图 如果设单缝与接收屏的距离为s,中央极强到光强极小点的距离为c,且sinθ≈tanθ=c/s,那么可以推得a=smλ/c.又在此次实验中,s=750mm,λ=6.5E(-4)mm,那么推得a=0.4875m/c,又由图可知:当m=1时,c=(88-82)/2=3mm,推得a=0.1625mm; 当m=2时,c=(91-79)/2=6mm,推得a=0.1625mm; 当m=3时,c=(94-76)/2=9mm,推得a=0.1625mm; 当m=4时,c=(96-74)/2=11mm,推得a=0.1773mm; 得到a的平均值0.1662mm,误差E=3.9%。 双缝干涉
光电计数器实验报告 学生姓名李志 学号081244115 专业名称光信息科学与技术 指导教师易煦农 时间日期2011-10-19 摘要 21世纪是信息时代,是获取信息,处理信息,运用信息的时代。传感与检测技术的重要性在于它是获得信息并对信息进行必要处理 的基础技术,是获取信 息和处理加工信息的手段,无法获取信息则无法运用信息。 光电式传感器是将光信号转化为电信号的一种传感器。它的理论基础是光电效应。这类效应大致可分为三类。第一类是外光电效应,即在光照射下,能使电子逸出物体表面。利用这种效应所做成的器件有真空光电管、光电倍增管等。第二类是内光电效应,即在光线照射下,能使物质的电阻率改变。这类器件包括各类半导体光敏电阻。第三类是光生伏特效应,即在光线作用下,物体内产生电动势的现象,此电动势称为光生电动势。这类器件包括光电池、光电晶体管等。光电效应都是利用光电元件受光照后,电特性发生变化。敏感的光波长是在可见光附近,包括红外波长和紫外波长。数字式电子计数器有直观和计数精确的优点,目前已在各种行业中普遍使用。数字式电子计
数器有多种计数触发方式,它是由实际使用条件和环境决定的。有采用机械方式的接触式触发的,有采用电子传感器的非接触式触发的,光电式传感器是其中之一,它是一种非接触式电子传感器。采用光电传感器制作的光电式电子计数器。这种计数器在工厂的生产流水线上作产品统计,有着其他计数器不可取代的优点。 【关键词】光电效应光电传感器光电计数器 ABSTRACT The 21st century is the age of information, it is the access to information, treatment information, use of the information age. Sensing and detection technology is important because it is the access to information and the information necessary to deal with the underlying technology, is access to information and means of processing information, unable to get information you won't be able to use information. Photoelectric sensor is a light signal into an electric signal of the sensor. It is the theoretical basis of the photoelectric effect. These effects can be broadly divided into three categories. The first type is outside of the photoelectric effect, namely, in daylight, can make the tungsten surface. Use this effect caused by device with vacuum photocell, photomultiplier tubes, etc. The second category is the photoelectric effect, i.e., in the light, can make the electrical resistivity of the material change. Such devices include various types of photosensitive semiconductor. The third category is photo voltaic effect, in the light, the objects within the EMF EMF, this is called light-induced electromotive force. This class of
学院实验报告 学院:专业:班级:成绩: 姓名:学号:组别:组员: 实验地点:实验日期:指导教师签名: 实验(2)项目名称:加速度传感器、速度传感器振动测量实验和悬臂梁固有频率测量实验 1.实验项目名称 加速度传感器、速度传感器振动测量实验和悬臂梁固有频率测量实验 2.实验目的和要求 (1)了解并掌握机械振动信号测量的基本方法 (2)掌握用瞬态激振方式,进行机械阻抗测试的仪器组合及使用方法,了解瞬态激振时的数据处理方法 (3)测出悬臂梁的固有频率 3.实验原理 (1)振动测量原理 机械在运动时,由于旋转件的不平衡、负载的不均匀、结构刚度的各向异性、间隙、润滑不良、支撑松动等因素,总是伴随着各种振动。 机械振动在大多数情况下是有害的,振动往往会降低机器性能,破坏其正常工作,缩短使用寿命,甚至造成事故。机械振动还伴随着同频率的噪声,恶化环境,危害健康。另一方面,振动也被利用来完成有益的工作,如运输、夯实、清洗、粉碎、脱水等。这时必须正确选择振动参数,充分发挥振动机械的性能。 在现代企业管理制度中,除了对各种机械设备提出低振动和低噪声要求外,还需随时对机器的运行状况进行监测、分析、诊断,对工作环境进行控制。为了提高机械结构的抗振性能,有必要进行机械结构的振动分析和振动设计。这些都离不开振动测试。 振动测试包括两种方式:一是测量机械或结构在工作状态下的振动,如振动位移、速度、加速度、频率和相位等,了解被测对象的振动状态,评定等级和寻找振源,对设备进行监测、分析、诊断和预测。二是对机械设备或结构施加某种激励,测量其受迫振
动,以便求得被测对象的振动力学参量或动态性能,如固有频率、阻尼、刚度、频率响应和模态等。 振动的幅值、频率和相位是振动的三个基本参数,称为振动三要素。 幅值:幅值是振动强度的标志,它可以用峰值、有效值、平均值等方法来表示。 频率:不同的频率成分反映系统内不同的振源,通过频谱分析可以确定主要频率成分及其幅值大小,从而寻找振源,采取响应的措施。 相位:振动信号的相位信息十分重要,如利用相位关系确定共振点、测量振型、旋转件动平衡、有源振动控制、降噪等。对于复杂振动的波形分析,各谐波的相位关系是不可缺少的。 在振动测量时,应合理选择测量参数,如振动位移是研究强度和变形的重要依据;振动加速度与作用力或载荷成正比,是研究动力强度和疲劳的重要依据;振动速度决定了噪声的高低,人对机械振动的敏感程度在很大频率范围内是由速度决定的。速度又与能量和功率有关,并决定动量的大小。 (2)YD-37加速度传感器简介 压电传感器的力学模型可简化为一个单自由度质量——弹簧系统。根据压电效应的原理,当晶体上受到振动作用力时后,将产生电荷量,该电荷量与作用力成正比,这就是压电传感器完成机电转换的工作原理。压电式加速度传感器在振动测试领域中应用广泛,可以测量各种环境中的振动量。YD-37加速度传感器与DRBS-12-A型简易电荷放大器的综合灵敏度约是6080mV/m.s-2。 (3)CD-21速度传感器简介 CD-21振动速度传感器的基本原理是基于一个惯性质量(线圈组件)和壳体,壳体中固定有磁铁,惯性质量用弹性元件悬挂在壳体上工作时,将传感器壳体固定在振动体上,这样当振动体振动时,在传感器工作频率范围内,线圈与磁铁相对运动,切割磁力线,在线圈内产生感应电压,该电压值正比于振动速度值,这就是振动速度传感器的工作原理。CD-21振动速度传感器的测量范围是10~1000Hz,灵敏度约是200mv/cm.s-2。 (4)悬臂梁试验台架由底座、悬臂梁、加速度传感器、激振捶等构成。悬臂梁结构总体尺寸为120*110*150mm(长*宽*高)。可进行悬臂梁固有频率和阻尼系数的测量。 实验时通过激振捶敲击悬臂梁,产生脉冲激振,通过安装在悬臂梁上的加速度传感器获取悬臂梁受瞬态激励后输出的振动信号波形(信号触发采样方式),经信号调理设备处理后,通过数据采集仪输入计算机中,从悬臂梁脉冲响应信号波形或信号功率谱就
光电检测技术 实验报告 题目:光电报警系统的设计和制作学院:仪器科学与光电工程学院专业:测控技术与仪器 班级: 学生姓名: 指导老师:
实验三 光电报警系统的设计和制作 一、设计任务 红外报警器系统的原理框图如图1所示。由红外光源发出的红外辐射被红外探测器接收,红外辐射信号变为电信号,经信号放大和处理电路后送报警电路。系统分成发送和接收两部分,分开放置。当没有人和物体进入这两部分之间,红外辐射没有被阻挡时,报警处于不报警状态。一旦有人或物体进入这两部分之间。红外辐射被阻挡,报警器立即翻转到报警状态。 图1 红外报警器系统原理框图 二、设计方案 (1)发射端电路 用NE555组成振荡器来驱动发光管,NE555构成多谐振荡器原题图如图2所示。下面对照电路图简述其工作原理及参数选择。 图2 多谐振荡器 注:1地 GND 2触发 3输出 4复位 5控制电压 6门限(阈值) 7放电 8电源电压Vc 当3脚为高电平(略低于Vc 时),输出电压将通过R1对C1充电。A 点电压按指数规律上升,时间常数为R1C1。 当A 点电压上升到上限阙值电压(约2Vc/3时),定时器输出翻转成低电平
(略大于0V)。这时,A点电压将随C1放电而按指数规律下降。当A点下降到下限阙值电压(约Vc/3)时,定时器输出变成高电平,调整R2的阻值得到严格的方波输出。 用NE555组成振荡器来驱动发光管时,要注意发光管上串联一个限流电阻。使输出电流小于或等于发光管的最大正向电流 F I。若振荡器输出电压为Vo,则 限流电阻R取值为F F O I V V R - ≥ 。如果限流电阻低于上述公式所得值,或未加限流电阻,则会造成发光管和定时器烧毁。 D2 LED 图3 振荡发射电路原理图 (2)光电检测、比较报警电路 D4 LED R8 500 图4 光电检测放大器电路原理图比较报警电路的设计利用光敏二极管的反向特性,当接收到光信号时,光敏二极管导通良好,产生电压,放大器即可对信号处理;当没有接收到光信号时,光敏二极管截止,放大器的同相端电压几乎为0。利用1/2LF353构成的光放大器,如图所示。用1/2LF353构成一个比较放大器。放大器的正端加2V左右偏压,负端加信号电压。当光线未阻断时,从主放大器来的交流信号经二极管检波电路,再经低通滤波器后得到直流电压,使后面的放大器负载输入端电位大于(或等于)正输入端电位。
1. 购物系统的需求分析和类划分 购物系统本身是一个十分复杂的系统,有很多细节问题如果深究会更加复杂,并且一般购物系统都是网页类型的,要有一个友好的界面,但是作为一个简单项目,该项目只是为了给JAVA初学者介绍一下开发的基本思想,以及面向对象时应该怎样去设计框架和实现流程,所以只是基于eclipse开发的一个简单的项目,并没有GUI的参与,并且很多细节问题作为后续研究,整体的设计比较简单,但是足以说明很多设计思想和设计理念,那么下面对基本的需求进行分析。 作为一个简单的购物系统,至少需要具备以下功能(这些功能分布在不同级的菜单中): (1)用户登录功能、用户账号密码修改功能,暂时不提供注册功能; (2)用户成功登录后,需要具备客户信息的管理功能、购物结算功能以及一些抽奖活动等; (3)客户信息管理功能下面又可以分出很多功能,比如说:查询、修改、增加等; (4)购物结算功能下面又可以分出很多功能,比如说:商品选购、付款、账单等; (5)抽奖活动下面又可以设计出多种的抽奖形式,从而进一步划分为许多新的功能模块。
(6)在一级菜单中要提供退出系统的功能,在二级菜单中要提供注销登录的功能,其他级菜单都要能够返回上一级菜单。 上面的这些功能都是一些比较基本的功能,那么如果按照面向流程的思想来设计,就会划分很多功能模块,然后按照流程一步步走就行,但是现在我们采用面向对象的思想来设计,那么应该如何考虑设计框架呢?面向对象的主要思想就是将一些需求抽象为许多类,然后建立这些类之间的联系,通过不同类之间的协同合作,就可以实现所有的功能。所以,现在的主要任务就是如何合理地抽象出这些类,以及这些类要实现什么功能,类之间的联系又是什么?下面通过本次设计的结构对这一过程进行分析。 (1)StartSMS类:用于系统的启动。我们的系统肯定需要一个启动类,这个类里面包含了main方法,用来启动这个系统,这个类是最顶层的,所以不能牵涉太多底层的细节实现,只需要实现一些顶层的基本流程就行,主要还是要调用底层其他类的一些方法来实现功能。 (2)Data类:用来存放我们的所有数据信息,本次设计主要存放的是已经预存的一些可供购买的商品信息和已经注册的会员信息。为什么需要这个类呢?大家想一想,在面向对象的设计中,我们的数据比较多,肯定不能零散地到处定义、任意修改,这样会使得系统的聚合程度太低,容易出现很多错误,并且难以进行后期功能扩展和错误修改,所以我们要把用到的一些公有的数据进行归类,然后放在一个类中,并且在该类中提供对这些数据进行操作的方法。
常用光电仪器原理及使用 实验报告 班级:11级光信息1班 姓名:姜萌萌 学号:110104060016 指导老师:李炳新
数字存储示波器 一、实验目的 1、熟悉数字存储示波器的使用方法; 2、测量数字存储示波器产生方波的上升时间; 二、实验仪器 数字存储示波器 三、实验步骤 1、产生方波波形 ⑴、打开示波器电源阅读探头警告,然后按下OK。按下“DEFAULT SETUP”按钮,默认的电压探头衰减选项是10X。 ⑵、在P2200探头上将开关设定到10X并将探头连接到示波器的通道1上,然后向右转动将探头锁定到位,将探头端部和基线导线连接到“PROBE COMP”终端上。 ⑶、按下“AUTOSET”按钮,在数秒钟内,看到频率为1KHz 电压为5V峰峰值得方波。按两次CH1BNC按钮删除通道1,
按下CH2BNC按钮显示通道2,重复第二步和第三步。 2、自动测量 ⑴、按下“MUASURE”按钮,查看测量菜单。 ⑵、按下顶部的选项按钮,显示“测量1菜单”。 ⑶、按下“类型”“频率”“值”读书将显示测量结果级更新信息。 ⑷、按下“后退”选项按钮。 ⑸、按下顶部第二个选项按钮;显示“测量2菜单”。 ⑹、按下“类型”“周期”“值”读数将显示测量结果与更新信息。 ⑺、按下“后退”选项按钮。 ⑻、按下中间选项按钮;显示“测量3菜单”。 ⑼、按下“类型”“峰-峰值”“值”读数将显示测量结果与更新信息。 ⑽、按下“后退”选项按钮。 ⑾、按下底部倒数第二个按钮;显示“测量4菜单”。⑿、按下“类型”“上升时间”“值”读数将显示测量结果与更新信息。
LCR测试仪 一、实验目的 1、熟悉LCR测试仪的使用方法; 2、了解LCR测试仪的工作原理; 3、精确测量一些电阻,电感,电容的值; 二、实验仪器 LCR测试仪,电阻,电容,电感等元件 三、LCR测试原理 根据待测元器件实际使用的条件和组合上的差别,LCR 测量仪有两种检测模式,串联模式和并联模式。串联模式以检测元器件Z为基础,并联模式以检测元器件的导纳Y为基础,当用户将测出流过待测元件的电流I,数字电压表将测出待测元件两端的电压V,数字鉴相器将测出电压V和电流I 之间的相位角 。检测结果被储存在仪器内部微型计算机的
信息与电气工程学院 课程设计说明书(2015 /2016 学年第1 学期) 课程名称:小型数据设计 题目:红外线计数器 专业班级:计算机1401 学生姓名:何亚茹赵君王中昆 学号:140210122 140210107 140210121 指导教师:生龙 设计周数:二周 设计成绩: 2016年01月08日
目录 1 程序设计 (1) 2 课程设的主要内容 (1) 2.1设计的要求.............. . (1) 2.2创新方案及原理分析 (1) 2.3方案论证与选择 (2) 2.4软件的设计 (3) 3主要芯片设计 (4) 3.1介绍 (4) 3.2 51 单片机的特点 (5) 3.3数码管 (7) 4系统设计 (8) 4.1单片机最小设计系统 (8) 4.2红外线检测电路 (9) 4.3计数显示部分 (10) 4.4蜂鸣器报警电路 (10) 4.5按键控制电路 (11) 5 红外计数器程序设计 (11) 5.1主程序设计 (11) 5.2子程序设计 (13) 6总结 (15) 7参考文献 (16)
1、程设计目的 课利用AT89C51单片机来制作一个手动计数器。通过具体的项目设计包括确定控制任务、系统总体方案设计、硬件系统设计、控制程序的设计等,以便掌握单片机系统设计的总体思路和方法,掌握基于单片机控制的电子产品开发的技术方法,培养个人的创新意识和动手能力。 2、课程设计的主要内容 2.1设计的要求 1.利用AT89C51单片机来制作一个红外线计数器。有物体经过红外对管时计数一次。计数的范围是0~99, 计数满时,又从零开始计数。 2.整个系统有较强的抗干扰能力,具有报警能力。 3.将计数值准确显示出来。 2.2创新方案及原理分析 总体电路是由AT89C51单片机系统、红外光电管电路、蜂鸣器报警电路、数码管显示部分、复位电路部分组成,其结构如图2.1所示 图 2.1 整体方框图 红外传感器感受到外界信息时,产生高低电平,通过软件程序设置单片机内部寄存器,当传感器的高低脉冲被单片机接收到时,单片机产生中断,中断产生后进入中断服务程序,通过设置中断服务程序,进行计数。并通过P0 口将计数信息传送至数码管,数码管显示计数的个数。当电路断电后重新启动计数器时,系统自动复位(上电自动复位),以00开始重新计数。
光学基础学习报告 一、教学内容: 光电镜头是用来作为光电接收器(CCD,CMOS )的光学传感器元件。 光学特性参数: 1、 焦距EFL (学名f ’) 是指主面到相应焦点的距离(如图1.1) 图1.1 每个镜片都有前后两个主面-前主面和后主面(放大率为1的共轭面)。相应的也有两个焦点-前焦和后焦。 凸透镜:双凸;平凸;正弯月(如图1.1) 图1.2 凹透镜:双凹;平凹;负弯月 图 1.3
折射率实际反映的是光在物质中传播速度与真空中速度的比值关系。 薄透镜:)]1()1[()1('12 1R R n f -?-== Φ Φ—透镜光焦距; f ’—焦距; n —折射率; R 1,R 2-两球面曲率半径 厚透镜:2 1221)1()]1()1[()1('1R nR d n R R n f -+ -?-==Φ d -中心厚度 干涉仪与光距座可以量测f ’,R1,R2,d →利用上述的公式可以计算出n 值,从而来确定所用材料。 A 、 EFL 增加,TOTR (光学总长)增加;要降低TOTR 就必须降低EFL ,但EFL 降低, 像高就要降低 B 、 EFL 与某些象差相关 C 、 EFL 上升将使F/NO 增大 D 、 EFL ,FOV (视场角)和IMA (像高)三者间有关系 tanFOV ?=EFL IMA -铁三角关系 EFL 的增大(减小)会使像高变大(小),为了保持像高,就必须要增大(减小)FOV ,然而FOV 的增大会使得REL (相对照度)的数值增大。 2、 BFL 后焦距(学名后截距) 图2.1 3、 F 数(F/NO ) D f NO F '/= f ’-FEL D 入-入瞳直径 入瞳为光阑经其前方光学镜片所成的像,反映进入光学系统的光线 A 、 与MTF 相关,F/NO ↑,则MTF ↑;反之下降 B 、 与景深相关,F/NO ↑,则景深↑,反之下降 C 、 与象差相关,F/NO ↑,则象差↓,反之增加 D 、 与光通量相关,F/NO ↑,则光通量↓,反之增加 对于光电镜头,F/NO 最大在2.8~3.5之间(经验值)允许有±5%的误差,在物方有照
光电定向实验 李康华 (哈尔滨工业大学威海校区光电科学系,威海264209) 摘要:采用四象限探测器作为光电定向实验,学习四象限探测器的工作原理和特性,同时掌握四象限探测器定向的工作方法。实验中,四象限探测器的四个限区验证了具有完全一样的光学特性,同时四象限的定向具有较良好的线性关系。 关键词:光电定向四象限探测器 1、引言 随着光电技术的发展,光电探测的应用也越来越广泛,其中光电定向作为光电子检测技术的重要组成部分,是指用光学系统来测定目标的方位,在实际应用中具有精度高、价格低、便于自动控制和操作方便的特点,因此在光电准直、光电自动跟踪、光电制导和光电测距等各个技术领域得到了广泛的应用。光电定向方式有扫描式、调制盘式和四象限式,前两种用于连续信号工作方式,后一种用于脉冲信号工作方式。,由于四象限光电探测器能够探测光斑中心在四象限工作平面的位置,因此在激光准直、激光通信、激光制导等领域得到了广泛的应用[1]. 本光电定向实验装置采用激光器作为光源,四象限探测器作为光电探测接收器,采用目前应用最广泛的一种光电定向方式现直观,快速定位跟踪目标方位。定向原理由两种方式完成:1、硬件模拟定向,通过模拟电路进行坐标运算,运算结果通过数字表头进行显示,从而显示出定向坐标;2、软件数字定向,通过AD 转换电路对四个象限的输出数据进行采集处理,经过单片机运算处理,将数据送至电脑,由上位机软件实时显示定向结果。 本实验系统是根据光学雷达和光学制导的原理而设计的,利用其光电系统可以直接、间接地测定目标的方向。采用650nm激光器做光源,用四象限探测器显示光源方向和强度。通过实验,可以掌握四象限光电探测器原理,并观测到红外可见光辐射到四象限探测器上的位置和强度变化。并利用实验仪进行设计性实验等内容,将光学定向应用到各领域中[2]。 2、实验原理 2.1、系统介绍 光电定向是指用光学系统来测定目标的方位,在实际应用中具有精度高、价格低、便于自动控制和操作方便的特点,因此在光电准直、光电自动跟踪、光电制导和光电测距等各个技术领域得到了广泛的应用。采用激光器作为光源,四象限探测器作为光电探测接收器,根据电子和差式原理,实现可以直观、快速观测定位跟踪目标方位的光电定向装置,是目前应用最广泛的一种光电定向方式。该
系统开发过程 □五个阶段 各种系统开发方法学在范围、复杂性、完善程度以及方法上有很大的不同。尽管有的方法学分三个阶段,有的分15个阶段,但是每个方法学所描述的要完成的活动基本上是相同的。本章要阐述的最重要的一点是:最好的方法学是那些始终把用户考虑进去的方法学。过去的情况是,用户管理人员与信息服务开发组合作来完成系统的一般功能说明书,然后,由信息服务人员来进行系统开发。现在,系统开发是各占50%的比例;因此,用户管理人员应该非常熟悉系统开发的大体过程,特别应该熟悉他们单位自己使用的方法学。 系统开发过程可分为五个阶段来描述。这五个阶段是: 1.第Ⅰ阶段—系统开始和可行性研究 2.第Ⅱ阶段—系统分析和设计 3.第Ⅲ阶段—程序设计 4.第Ⅳ阶段—转换和实现 5.第Ⅴ阶段—实现后的评价 第Ⅰ阶段—系统开始和可行性研究是在为开发一个建议的系统提供人力和资源之前完成的。第Ⅰ阶段多数的工作和编写的资料是第Ⅱ阶段的输入。在第Ⅱ阶段—系统分析和设计期间,系统分析员与用户一起工作以编写详细的功能和系统的说明书。将这些说明书交给程序员,然后开始第Ⅲ阶段——程序设计。在第Ⅵ阶段—转换和实现期间,一旦软件开发出来,则建立数据文件,转换现有系统,并且实现新系统。第Ⅴ阶段—实现后的评价。在开始了系统寿命期中的生产阶段之后,提出(经常被忽略的)实现后的评价要求。 □具体开发过程 下面将逐步地描述系统开发过程。至于具体的细节、相互的影响、方法、形式等,用户管理人员应该与信息服务经理联系,与他们讨论公司当前使用的方法学,同时再看看公司内部描述方法学的手册。 1.第Ⅰ阶段—系统开始和可行性研究 在第Ⅰ阶段的活动中很少有与其他四个阶段的活动相一致的。此处所提供的方法包括对于受拒绝后的再次服务请求的方法以及将技术转移可能性的研究合并到诸过程中这些内容。第Ⅰ阶段最终的产品有两个部分。第一部分是实际的可行性研究报告,它包含对建议的或改进的系统的描述以及利润/成本分析。第二部分是系统的初步设计。它对于估价成本和利润是必要的。该初步设计是第Ⅱ阶段—系统分析和设计的直接输入。 将系统的初步设计并入可行性研究的依据是,多数可行性研究是以概念而不是以设计为基础的。如果在描述系统目标上花的时间太少,那么成本估计,甚至利润估计将是错误的。用概念来指导可行性研究注定会导致成本过高,而且用户不满意。在系统初步设计上所花费的时间是值得的,即使拒绝可行性研究也是如此。因为所编写的资料将必然会被证实其他项目中是有价值的。 下述编号的活动与表20.9.2的系统开发责任矩阵相对应。 (1)提交服务请求 图20.5.1说明了包括对受拒绝的请求再次请求处理的一种方法。所请求的服务毕竟是用户做的,因此,应该由用户着手进行。我们鼓励用户管理人员请求信息服务人员的帮助,但是应该再一次强调,业务领域的管理人员应该对各种大小的服务请求都提供合适的资料。 (2)估价服务请求 正如在责任矩阵中所注释的那样,信息服务管理人员只能承诺小的项目(由公司的方针所确定的小项目)。 (3)指定可行性研究组 信息服务经理和用户经理共同来指定适当的混合的人选以组成可行性分析研究组。该组至少由一名系统分析员和一名用户代表组成。可行性研究组的大小取决于可行性研究的范围和时间限制。 用户代表应该熟悉当前专业领域的所有工作,用户经理、总经理助理,或专业领域分析员是合理的候选者,用户的系统分析员,具有计算机信息处理基础知识的情况已经越来越普
光学系统设计实验报告 设计题目:测量显微镜光学系统 专业班级:光信息08-1班 学生姓名: 学号: 指导老师:
一实验目的 1.了解光学系统设计的基本步骤,学会基本外形尺寸的计算。 2.熟悉ZEMAX软件的操作,了解操作要领,学会应用基本的相差 评价函数并进行优化。 二、实验器材 ZEMAX软件、相关实验指导书 三、设计要求 1)设计说明书和镜头文件。镜头文件包括物镜镜头文件、目镜镜头文件和光学系统镜头文件。 2)部分技术参数选择: ①目镜放大率10 ②沿光轴,目镜最后一面到物面沿光轴的几何距离280毫米 ③对工件实边缘的对准精度为2.2微米 ④其它参数自定 3)其他要求 ①视场大小自定,尽可能大些,一般达到商用仪器的一半。 ②可以不加棱镜。如加棱镜,折转角大小自定。棱镜可以按照等效玻璃板处理。 ③可以对物镜和目镜进行整体优化或独立优化。 ④可以加上CCD。 四、具体设计 1.系统结构设计思路 1)系统结构框图
物体经物镜所成的放大的实像与分划板重合,两者一同经目镜成一放大的虚像。棱镜的型式为斯米特屋脊棱镜,它能使系统成正像,并且使光路转折45°角,以便于观察和瞄准(此处可以不加设计)。为避免景深影响瞄准精度,物镜系统采用物方远心光路,即孔径光阑位于物镜像方焦面上。 (图1 显微镜系统结构图) 2)等效光路原理图
(图2 显微镜无光轴偏转的等效光路图) 2.外形尺寸计算 1)首先绘出光学系统的等效光路原理图。如图所示,首先将棱镜作为等效空气平板处理。 2)求实际放大率。系统的有效放大率由系统的瞄准精度决定。用米字形虚线瞄准被测件轮廓,得系统有效放大率 由于工具显微镜一般要求有较大的工作距和物方线视场,又要求共轭距不能太长,因而工具显微镜的实际放大率和物镜的放大率均不宜过大。取实际放大率为 3)求数值孔径 4)求物镜和目镜的放大率 目镜的放大率 物镜的放大率 5)求目镜的焦距 ? -=Γ30102.02 .21.500055 .061.061.0 nsinU ≈??===δλk NA 3 -=ΓΓ =e β?=Γ10e mm f e e 25250 =Γ= '? ≥?=≥ Γ222 .21.55 .725.72δk
建筑物理 ——光学实验报告 实验一:材料的光反射比、透射比测量实验二:采光系数测量 实验三:室内照明实测 实验小组成员: 指导老师: 日星期二3月12年2013日期: 实验一、材料的光反射比和光透射比测量
一、实验目的与要求 室内表面的反射性能和采光口中窗玻璃的透光性能都会直接或间接的影响室内光环境的好坏,因此,在试验现场采光实测时,有必要对室内各表面材料的光反射比,采光口中透光材料的过透射比进行实测。 通过实验,了解材料的光学性质,对光反射比、透射比有一巨象的数值概念,掌握测量方法和注意事项。 二、实验原理和试验方法 (一)、光反射比的实验原理、测量内容和测量方法 光反射比测量方法分为直接测量方法和间接测量法,直接测量法是指用样板比较和光反射比仪直接得出光反射比;间接法是通过被测表面的照度和亮度得出漫反射面的光反射比。下面是间接测量法。 1.实验原理 (1)用照度计测量: P是投射到某一材料表面反射出来的光通量与被该光源的光通量的比值,根据光反射比的定义:光反射比即: φφP=P/因为测量时将使用同一照度计,其受光面积相等, 且,所以对于定向反射的表面,我们可以用上述代入式,整理后得: P=EE P/对于均匀扩散材料也可以近似的用上述式。 可知只要测出材料表面入射光照度E和材料反射光照度Ep,即可计算出其反射比。 (2)用照度计和亮度计测量 用照度计和亮度计分别测量被测表面的照度E和亮度L后按下式计算 πL/EP= 2;被测表面的亮度,cd/m式中:L---E—被测表面的照度,lx 。 2.测量内容 要求测量室内桌面、墙面、墙裙、黑板、地面的光反射比。每种材料面随机取3个点测量3次,然后取其平均值。 3.测量方法 ①将照度计电源(POWER)开关拨至“ON”,检查电池,如果仪器显示窗出现“BATT”字样,则需要换电池; ②将光接收器盖取下,将其光敏表面放在待测处,再将量程(RANGE)开关拨至适当位置,例如,拨在×1挡,测量的仪器显示值乘以量程因子即为测量结果。另有一种自动量程照度计,数字显示中的小数点随照度的大小不同而自动移位,只需将所显示的数字乘以量程因子即为测量结果(单位:lx)。有的照度计为自动量程,直接读取照度计数字即为测量结果。 ③在稳定光源下,将光接收器背面紧贴被测表面,测其入射照度E;然后将光接收器感光面对准被测表面的同一位置,逐渐平移光接收器平行离开测点,照度值逐渐增大并趋于稳定(约300mm左右),读;ρ,即可计算出光反射比Ep取反射照度值 ④测量时尽量缩短入射照度和反光照度间的时间间隔,并尽可能的保持周围光环境的一致性。
开发阶段 项目立项主要任务 提出开发请求 用户需求分析 企业的运行情况 企业管理方法 信息需求分析 基础数据管理状态 现有信息系统运行状态 确定系统目标常用工具初步调查各种调查方法系统规划划分子系统 功能结构图的总体设计 数据库系统总体结构设计 总体方案设计代码方案的总体设计 系统物理配置总体方案的设计 工程费用概算与效益分析 制定实施计划 给出系统的总体方案 经济上的可行性研究 技术上的可行性研究 可行性研究操作上的可行性研究
法律上的可行性研究 管理上的可行性研究 书写可行性分析报告 审核批准 组织机构与功 详能分析审核项目开发计划 申和可行性分析报告 组织机构与功能调查 绘制组织机构图 绘制业务功能一览表 收集相关资料 绘制业务流程图 绘制表格分配图 收集相关资料 绘制数据流程图 分析系统目标 分析原系统存在的问题 优化子系统的划分结果,分析各子系统的功能数据分析,绘制新系统的DFD图 新系统的边界分析 确定数据处理方式
系统分析报告组织结构图业务功能一览表业务流程图表格分配图 数据流图U/C矩阵PERT图细 系调业务流程分析xx 数据流分析分析系统分析与逻辑模 型设计 系系统物理配置方案 设计完成系统分析报告,交有关部门审批,选择计算机机型 确定网络 确定DBMS统设计功能结构图设计 系统流程图设计 处理流程图设计 详细设计编码 数据存储设计 输入与输出设计 指定设计规范 编写程序说明书 编写系统设计报告 物理系统的实施绘制功能结构图 划分模块
把DFD图转化为管理信息系统流程图具体规定处理过程中各个步骤 为新系统中的数据编码 统一并改进编码 DB的逻辑结构设计 DB的物理结构设计 输入设计、输出设计 制定文件名和程序名的统一格式 定义处理过程 完成系统设计报告,提交有关部门审批采购计算机和通讯网络系统 准备机房 安装调试设备 管理程序设计 业务程序设计 程序调控 分调 总调 以新系统代替旧系统 将系统交付使用,验收是否合格 编写程序设计说明书
光学设计性实验报告(一步彩虹全息) 姓名: 学号: 学院:物理学院
一步彩虹全息 摘要彩虹全息是用激光记录全息图, 是用白光再现单色或彩色像的一种全息技术。彩虹全息术的关键之处是在成像光路( 即记录光路) 中加入一狭缝, 这样在干板上也会留下狭缝的像。本文研究了一步彩虹全息图的记录和再现景象的基本原理、一步彩虹全息图与普通全息图的区别和联系、一步彩虹全息的实验光路图,探讨了拍摄一步彩虹全息图的技术要求和注意事项,指出了一步彩虹全息图的制作要点, 得出了影响拍摄效果的佳狭缝宽度、最佳狭缝位置及曝光时间对彩虹全息图再现像的影响。 关键词:一步彩虹全息;狭缝;再现 1 光学实验必须要严密,尽可能地减少实验所产生的误差; 2 实验仪器 防震全息台激光器分束镜成像透镜狭缝干板架光学元件架若干干板备件盒洗像设备一套线绳辅助棒扩束镜2个反射镜2个 3 实验原理 3.1 像面全息图 像面全息图的拍摄是用成像系统使物体成像在全息底板上,在引入一束与之相干的参考光束,即成像面全息图,它可用白光再现。再现象点的位置随波长而变化,其变化量取决于物体到全息平面的距离。 像面全息图的像(或物)位于全息图平面上,再现像也位于全息图上,只是看起来颜色有变化。因此在白光照射下,会因观察角度不同呈现的颜色亦不同。 3.2 彩虹全息的本质 彩虹全息的本质是要在观察者与物体的再现象之间形成一狭缝像,使观察者通过狭缝像来看物体的像,以实现白光再现单色像。若观察者的眼睛在狭缝像附近沿垂直于狭缝的方向移动,将看到颜色按波长顺序变化的再现像。若观察者的眼睛位于狭缝像后方适当位置, 由于狭缝对视场的限制, 通过某一波长所对应的狭缝只能看到再现像的某一条带, 其色彩与该波长对应, 并且狭缝像在空间是连
实验报告2 ――光电传感器测距功能测试 1.实验目的: 了解光电传感器测距的特性曲线; 掌握LEGO基本模型的搭建; 熟练掌握ROBOLAB软件; 2.实验要求: 能够用LEGO积木搭建小车模式,并在车头安置光电传感器。能在光电传感器紧贴红板,以垂直红板的方向作匀速直线倒车运动过程中进行光强值采集,绘制出时间-光强曲线,然后推导出位移-光强曲线及方程。 3.程序设计: 编写程序流程图并写出程序,如下所示:
ROBOLAB程序设计: 4.实验步骤: 1)搭建小车模型,参考附录步骤或自行设计(创新可加分)。 2)用ROBOLAB编写上述程序。 3)将小车与电脑用USB数据线连接,并打开NXT的电源。点击ROBOLAB 的RUN按钮,传送程序。 4)取一红颜色的纸板(或其他红板)竖直摆放,并在桌面平面与纸板垂直 方向放置直尺,用于记录小车行走的位移。 5)将小车的光电传感器紧贴红板放置,用电脑或NXT的红色按钮启动小 车,进行光强信号的采样。从直尺上读取小车的位移。 6)待小车发出音乐后,点击ROBOLAB的数据采集按钮,进行数据采集, 将数据放入红色容器。共进行四次数据采集。 7)点击ROBOLAB的计算按钮,分别对四次采集的数据进行同时显示、平 均线及拟和线处理。 8)利用数据处理结果及图表,得出时间同光强的对应关系。再利用小车位 移同时间的关系(近似为匀速直线运动),推导出小车位移同光强的关 系表达式。 5.调试与分析 a)采样次数设为24,采样间隔为0.05s,共运行1.2s。采得数据如下所示。
b)在ROBOLAB的数据计算工具中得到平均后的光电传感器特性曲线,如图所示: c)对上述平均值曲线进行线性拟合,得到的光强与时间的线性拟合函数: