
中南大学 字符设备驱动程序 课程设计报告 姓名:王学彬 专业班级:信安1002班 学号:0909103108 课程:操作系统安全课程设计 指导老师:张士庚 一、课程设计目的 1.了解Linux字符设备驱动程序的结构; 2.掌握Linux字符设备驱动程序常用结构体和操作函数的使用方法; 3.初步掌握Linux字符设备驱动程序的编写方法及过程; 4.掌握Linux字符设备驱动程序的加载方法及测试方法。 二、课程设计内容 5.设计Windows XP或者Linux操作系统下的设备驱动程序; 6.掌握虚拟字符设备的设计方法和测试方法;
7.编写测试应用程序,测试对该设备的读写等操作。 三、需求分析 3.1驱动程序介绍 驱动程序负责将应用程序如读、写等操作正确无误的传递给相关的硬件,并使硬件能够做出正确反应的代码。驱动程序像一个黑盒子,它隐藏了硬件的工作细节,应用程序只需要通过一组标准化的接口实现对硬件的操作。 3.2 Linux设备驱动程序分类 Linux设备驱动程序在Linux的内核源代码中占有很大的比例,源代码的长度日益增加,主要是驱动程序的增加。虽然Linux内核的不断升级,但驱动程序的结构还是相对稳定。 Linux系统的设备分为字符设备(char device),块设备(block device)和网络设备(network device)三种。字符设备是指在存取时没有缓存的设备,而块设备的读写都有缓存来支持,并且块设备必须能够随机存取(random access)。典型的字符设备包括鼠标,键盘,串行口等。块设备主要包括硬盘软盘设备,CD-ROM等。 网络设备在Linux里做专门的处理。Linux的网络系统主要是基于BSD unix的socket 机制。在系统和驱动程序之间定义有专门的数据结构(sk_buff)进行数据传递。系统有支持对发送数据和接收数据的缓存,提供流量控制机制,提供对多协议的支持。 3.3驱动程序的结构 驱动程序的结构如图3.1所示,应用程序经过系统调用,进入核心层,内核要控制硬件需要通过驱动程序实现,驱动程序相当于内核与硬件之间的“系统调用”。
3.2 部分软件设计 3.2.3显示子程序 动态显示程序框图如图所示。显示程序的要点有两个:一是代码转换。因为直接驱动LED 显示器的是字形码,而人们习惯的是0、1、2、…、F 等字符,因此,必须将待显示的字符转换成字形码。转换用查表的方法进行。二是通过软件实现逐位轮流点亮每个LED 。 为了实现代码转换,首先开辟一个显示缓冲区,将待显示的字符预先存放在缓冲区中。由于有4位LED 显示器,故不妨假设显示缓冲区长度为4个字节。显示缓冲区地址为DIS 0~DIS 3 ,DIS 0单元与最左边一位LED 相对应,DIS 3单元与最右边一位LED 相对应。 程序清单如下: DIS : ORG 0500H MOV A ,#00000011B MOV DPTR ,#7F00H MOVX @DPTR ,A MOV R0,#78H MOV R3,#7FH MOV A ,R3 LD : MOV DPTR ,#7F01H 开 始 结 束 8051初始化 指向下个显示缓冲单元 显示下一位 延时1mS 段选码送入 查段选表 送位选字 动态显示初始化 3位显示完?
有键闭合吗? 确有键闭合吗 闭合键释放吗 返 回 MOVX @DPTR ,A INC DPTR MOV A ,@R0 ADD A ,#0DH MOVC A ,@ DPTR ACALL DLY MOV A ,R3 JNB A ,R0 RR A ,LD1 MOV R3,A INC R0 AJMP LD0 LD1: SJMP LD1 DSEG :DB 3FH ,06H ,5BH ,4FH ,66H ,6DH 7DH ,07H ,7FH ,6FH DLY : MOV R7,#02H DL : MOV R6,#0FFH DL1: DJNZ R6,DL1 DJNZ R7,DL RET 3.2.4键盘子程序 键盘扫描子程序框图如图 图3-4 键盘扫描子程序框图 开 始 两次调用 延时子程序 判断闭合键号 键号 → A 调用延时子程序
一:安装软件 点击 选择是(Y) 选择I accept 选择Install 安装成功,点击“确定”按钮即完成安装。 二、软件的设置 点击桌面开始按钮所有程序---Virtual Audio Cable —Control panel 进入软件初始化 设置。 在Cables 中选择1(即首次设置一个虚拟通道),点击旁边的Set 按钮生成通道Cable1. 在参数设置区将Line 、Mic (可选可不选)、S/PDIF (可选可不选)三个选项后面的方框打钩,选中之后点击参数设置区内的设置按钮Set ,即完成了,对虚拟声卡通道1 的设置。 鼠标右键点击桌面右下角的喇叭------ 调整音频属性---- < 或者点击开始—控制面板--- 声音、 语音和音频设备--- 声音和音频设备>弹出: 选择语音 此时语音部分的设置为原系统默认的设备,保持不变。 选择音频: 改变声音播放、录音的选项内容:
如上图将声音播放、录音的默认设备全部改为Virtual Cable 1 。点击应用--- 确定即可。 三、打开录音机录音--- 录制电脑里播放出来的音频(不包含麦克风 里的声音) - 即“内录” 开始--- 所有程序—附件--- 娱乐--- 录音机 点击确定即可开始录音(注:此时可在电脑中打开相应的音频文件,开始录音) 此时音频波段显示有声音输入,但是电脑的耳机听不到正在播放的音频文件(属正常现象)。若想同时听到音频文件的内容点击桌面开始按钮所有程序---Virtual Audio Cable —Audio Repeater 。 修改为 点击Start 即可听到正在录制的音频文件。此时的录音即是通过虚拟声卡通道录制电脑里的声音的。 四、同时录电脑里播放的声音和麦克风收集的外部声音----- 即混录 <通过这种方法解决现有笔记本无“立体声混音”或“波形音”选项的问题> 在《三打开录音机录音--- 录制电脑里播放出来的音频(不包含麦克风里的声音)------------ 即“内录”》的同时,在打开一个irtual Audio Cable —Audio Repeater 窗口将其设置为: 即将外部麦克风收集的声音转移到虚拟声卡通道Cable1 中,同电脑里播放的声音一起被录音软件收录为音频文件。
编译hello world设备驱动程序详细过程 1、安装与你的开发板相同的内核版本的虚拟机,我的板子内核是2.6.8.1,虚拟机是2.6.9, 一般是虚拟机的内核只能比板子内核新,不能旧 #uanme –a [1](在任何目录下,输入此命令,查看虚拟机的内核版本,我的内核版本是2.6.9) 2、在虚拟机上设置共享目录,我的共享目录在linux下的/mnt/hgfs/share [2]share是自己命名的,我的物理机上,即Windows下的目录是G:/share, 3、在Windows下,把开发板的的交叉开发工具链[3],内核源码包[4],复制到物理机的共享目录下[5] 即Windows下的目录是G:/share, 4、#cp /mnt/hgfs/share/cross-3.3.2.tar.bz2 /usr/local/arm [6] 在Linux下,把交叉工具链,复制到/usr/local/arm目录下 5、#cd /usr/local/arm 6、#tar jxvf cross-3.3.2.tar.bz2 [7] 并在当前目录/usr/local/arm下解压它cross-2.95.3.tar.bz2和gec2410-linux-2.6.8.tar.bz2也是用同样的命令去解压 7、#export PATH=/usr/local/arm/3.3.2/bin:$PATH [8] 安装交叉工具链,在需要使用交叉编译时,只要在终端输入如下命令 #export PATH=/usr/local/arm/版本/bin:$PATH 即可,在需要更改不同版本的工具链时,重新启动一个终端,然后再一次输入上面的命令即可,使用哪个版本的交叉工具链,视你要编译的内核版本决定,编译2.4版本的内核,则用2.95.3版本的交叉工具链,而2.6版本内核的,则要用3.3.2版本的交叉工具链。 8、#cp gec2410-linux-2.6.8.tar.bz2 /root [9]把内核拷贝到/root目录下, 9、#cd /root 10、#tar gec2410-linux-2.6.8.tar.bz2 [10] 在/root解压开发板的内核源码压缩包gec2410-linux-2.6.8.tar.bz2,得到gec2410-linux-2.6.8.1文件夹 11、#cd /root/ gec2410-linux-2.6.8.1 12、#cp gec2410.cfg .config [11] gec2410.cfg文件是广嵌开发板提供的默认内核配置文件,在这里首先把内核配置成默认配置,然后在此基础上用make menuconfig进一步配置,但在这里,不进行进一步的配置,对于内核配置,还需要看更多的知识,在这里先存疑。 13、#make [12]在内核源代码的根目录gec2410-linux-2.6.8.1下用make命令编译内核,注意,先安装交叉工具链,再编译内核,因为这里编译的hello.ko驱动模块最终是下载到开发板上运行的,而不是在虚拟机的Linux系统运行的,如果是为了在虚拟机的Linux系统运行的,则不用安装交叉编译工具链arm-linux-gcc,而直接用gcc,用命令#arm-linux-gcc –v 可以查看当前已经安装的交叉编译工具链的版本。这里编译内核不是为了得到内核的映象文件zImage(虽然会得到内核的映象文件zImage),而是为了得到编译hello.o模块需要相关联,相依赖(depends on)的模块。 14、#cd /root 12、#mkdir hello [13]在/root目录下建立hello文件夹, 13、#cd hel 14 、#vi hello.c [12]编辑hello.c文件,内容是《Linux设备驱动程序》第三版22页的hello world程序。 15、#vi Makefile [13]在hello文件夹下编辑Makefile文件, 16、obj-m := module.o [14] 这是Makefile的内容,为obj-m := module.omodule.o视你编辑的.c文件而定,这里则要写成hello.o,写完后,保存退出。 17、cd /root/hello
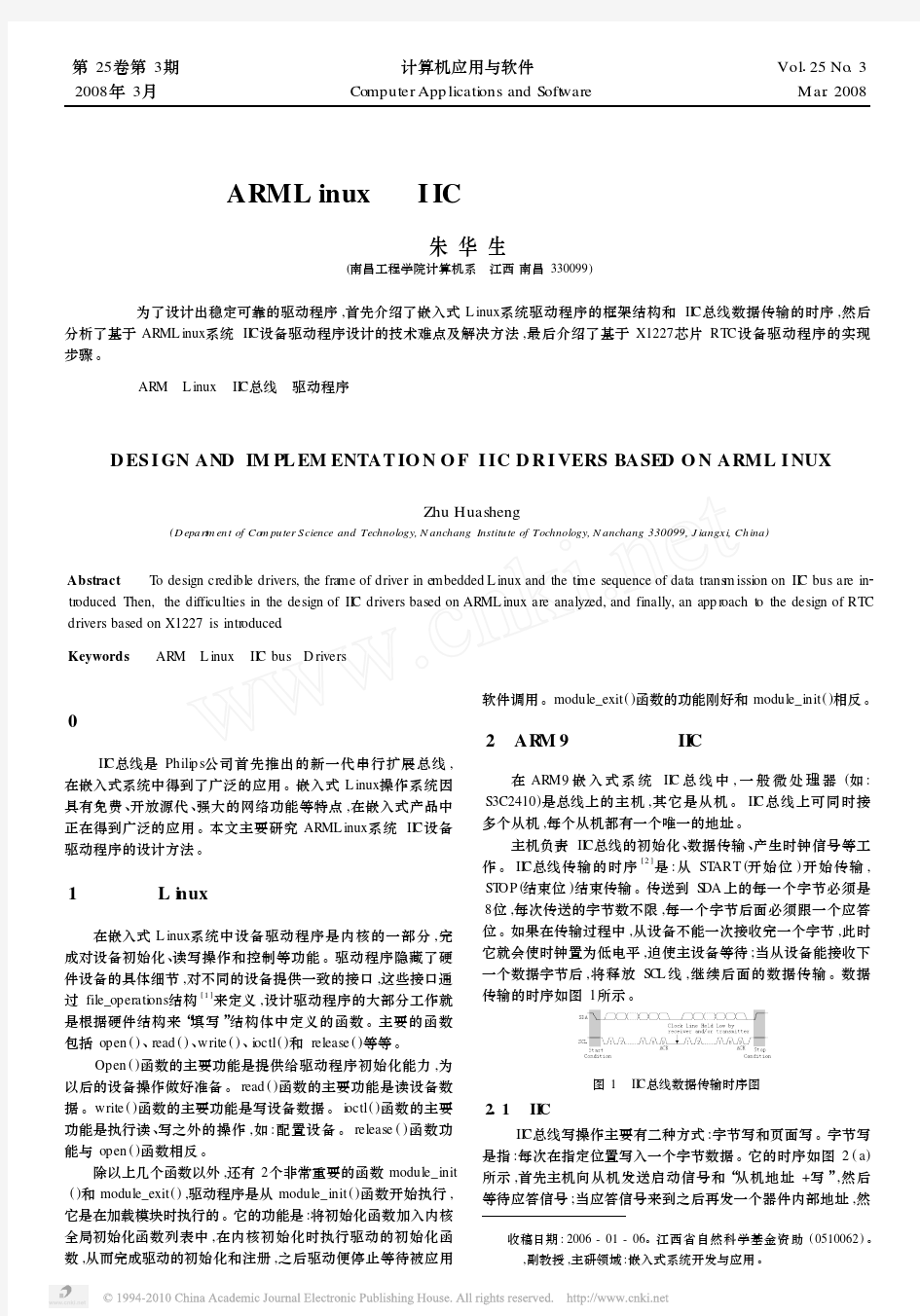
IIC设备驱动程序 IIC设备是一种通过IIC总线连接的设备,由于其简单性,被广泛引用于电子系统中。在现代电子系统中,有很多的IIC设备需要进行相互之间通信 IIC总线是由PHILIPS公司开发的两线式串行总线,用于连接微处理器和外部IIC设备。IIC设备产生于20世纪80年代,最初专用与音频和视频设备,现在在各种电子设备中都广泛应用 IIC总线有两条总线线路,一条是串行数据线(SDA),一条是串行时钟线(SCL)。SDA负责数据传输,SCL负责数据传输的时钟同步。IIC设备通过这两条总线连接到处理器的IIC总线控制器上。一种典型的设备连接如图: 与其他总线相比,IIC总线有很多重要的特点。在选择一种设备来完成特定功能时,这些特点是选择IIC设备的重要依据。 主要特点: 1,每一个连接到总线的设备都可以通过唯一的设备地址单独访问 2,串行的8位双向数据传输,位速率在标准模式下可达到100kb/s;快速模式下可以达到400kb/s;告诉模式下可以达到3.4Mb/s 3,总线长度最长7.6m左右 4,片上滤波器可以增加抗干扰能力,保证数据的完成传输 5,连接到一条IIC总线上的设备数量只受到最大电容400pF的限制 6,它是一个多主机系统,在一条总线上可以同时有多个主机存在,通过冲突检测方式和延时等待防止数据不被破坏。同一时间只能有一个主机占用总线 IIC总线在传输数据的过程中有3种类型的信号:开始信号、结束信号、和应答信号 >>开始信号(S): 当SCL为高电平时,SDA由高电平向低电平跳变,表示将要开始传输数据 >>结束信号(P):当SCL为高电平时,SDA由低电平向高电平跳变,表示结束传输数据 >>响应信号(ACK): 从机接收到8位数据后,在第9个周期,拉低SDA电平,表示已经收到数据。这个信号称为应答信号 开始信号和结束信号的波形如下图:
Linux字符设备驱动(转载) 来源: ChinaUnix博客日期:2008.01.01 18:52(共有0条评论) 我要评论 Linux字符设备驱动(转载) 这篇文章描述了在Linux 2.4下,如何建立一个虚拟的设备,对初学者来说很有帮助。原文地址:https://www.doczj.com/doc/ad2672368.html,/186/2623186.shtml Linux下的设备驱动程序被组织为一组完成不同任务的函数的集合,通过这些函数使得Windows的设备操作犹如文件一般。在应用程序看来,硬件设备只是一个设备文件,应用程序可以象操作普通文件一样对硬件设备进行操作,如open ()、close ()、read ()、write () 等。 Linux主要将设备分为二类:字符设备和块设备。字符设备是指设备发送和接收数据以字符的形式进行;而块设备则以整个数据缓冲区的形式进行。字符设备的驱动相对比较简单。 下面我们来假设一个非常简单的虚拟字符设备:这个设备中只有一个4个字节的全局变量int global_var,而这个设备的名字叫做"gobalvar"。对"gobalvar"设备的读写等操作即是对其中全局变量global_var的操作。 驱动程序是内核的一部分,因此我们需要给其添加模块初始化函数,该函数用来完成对所控设备的初始化工作,并调用register_chrdev() 函数注册字符设备: static int __init gobalvar_init(void) { if (register_chrdev(MAJOR_NUM, " gobalvar ", &gobalvar_fops)) { //…注册失败 } else
PS2键盘的单片机编程 在单片机系统中,经常使用的键盘都是专用键盘.此类键盘为单独设计制作的,成本高、使用硬件连接线多,且可靠性不高,这一状况在那些要求键盘按键较多的应用系统中更为突出.与此相比,在PC系统中广泛使用PS/2键盘具有价格低、通用可靠,且使用连接线少(仅使用2根信号线)的特点,并可满足多种系统的要求.因此在单片机系统中应用PS/2键盘是一种很好的选择. 文中在介绍PS/2协议和PS/2键盘工作原理与特点的基础上,给出了一个在单片机上实现对PS/2键盘支持的硬件连接与驱动程序设计实现.该设计实现了在单 片机系统中对PS/2标准104键盘按键输入的支持.使用Keil C51开发的驱动程序接口和库函数可以方便地移植到其他单片机或嵌入式系统中.所有程序在 Keil uVision2上编译通过,在单片机AT89C51上测试通过. 1 PS/2协议 目前,PC机广泛采用的PS/2接口为mini-DIN 6pin的连接器,如图1所示. PS/2设备有主从之分,主设备采用Female插座,从设备采用Male插头.现在广泛使用的PS/2键盘鼠标均在从设备方式下工作.PS/2接口的时钟 与数据线都是集电极开路结构,必须外接上拉电阻(一般上拉电阻设置在主设备中).主从设备之间数据通信采用双向同步串行方式传输,时钟信号由从设备产生. 1.1 从设备到主设备的通信 当从设备向主设备发送数据时,首先检查时钟线,以确认时钟线是否为高电平.如果是高电平,从设备就可以开始传输数据;反之,从设备要等待获得总线的控制权,才能开始传输数据.传输的每一帧由11位组成,发送时序及每一位的含义如图2 所示. 每一帧数据中开始位总是为0,数据校验采用奇校验方式,停止位始终为1.从设 备到主设备通信时,从设备总是在时钟线为高时改变数据线状态,主设备在时钟 下降沿读人数据线状态.
嵌入式培训专家
Linux网络设备驱动
主讲:宋宝华
https://www.doczj.com/doc/ad2672368.html,
华清远见
今天的内容
vLinux网络设备驱动架构 vLinux网络设备驱动数据流程
? NON-NAPI模式数据接收流程 ? NAPI模式数据接收流程 ? 数据发送流程
vLinux网络协议栈的实现
? TCP/UDP/IP/MAC各层数据传递 ? 网络系统调用与socket
华清远见
Linux网络设备驱动架构
华清远见
net_device
struct net_device_ops { int (*ndo_open)(struct net_device *dev); int (*ndo_start_xmit) (struct sk_buff *skb, struct net_device *dev); int (*ndo_set_mac_address)(struct net_device *dev, void *addr); int (*ndo_do_ioctl)(struct net_device *dev, struct ifreq *ifr, int cmd); void (*ndo_tx_timeout) (struct net_device *dev); ... }
struct net_device { struct net_device_stats stats; const struct net_device_ops *netdev_ops; const struct ethtool_ops *ethtool_ops; ... }
struct ethtool_ops { int (*get_settings)(struct net_device *, struct ethtool_cmd *); int (*set_settings)(struct net_device *, struct ethtool_cmd *); void (*get_drvinfo)(struct net_device *, struct ethtool_drvinfo *); int (*get_regs_len)(struct net_device *); ... }
/ 开发平台;MSP430 IIC总线驱动代码 本人试用过,可以成功的调通 /////////////////////////////////////////////////////////// //iic.c #include
如何编写Linux设备驱动程序 Linux是Unix操作系统的一种变种,在Linux下编写驱动程序的原理和思想完全类似于其他的Unix系统,但它dos或window环境下的驱动程序有很大的区别。在Linux环境下设计驱动程序,思想简洁,操作方便,功能也很强大,但是支持函数少,只能依赖kernel中的函数,有些常用的操作要自己来编写,而且调试也不方便。本文是在编写一块多媒体卡编制的驱动程序后的总结,获得了一些经验,愿与Linux fans共享,有不当之处,请予指正。 以下的一些文字主要来源于khg,johnsonm的Write linux device driver,Brennan's Guide to Inline Assembly,The Linux A-Z,还有清华BBS上的有关device driver的一些资料. 这些资料有的已经过时,有的还有一些错误,我依据自己的试验结果进行了修正. 一、Linux device driver 的概念 系统调用是操作系统内核和应用程序之间的接口,设备驱动程序是操作系统内核和机器硬件之间的接口。设备驱动程序为应用程序屏蔽了硬件的细节,这样在应用程序看来,硬件设备只是一个设备文件,应用程序可以象操作普通文件一样对硬件设备进行操作。设备驱动程序是内核的一部分,它完成以下的功能: 1)对设备初始化和释放; 2)把数据从内核传送到硬件和从硬件读取数据; 3)读取应用程序传送给设备文件的数据和回送应用程序请求的数据; 4)检测和处理设备出现的错误。 在Linux操作系统下有两类主要的设备文件类型,一种是字符设备,另一种是块设备。字符设备和块设备的主要区别是:在对字符设备发出读/写请求时,实际的硬件I/O一般就紧接着发生了,块设备则不然,它利用一块系统内存作缓冲区,当用户进程对设备请求能满足用户的要求,就返回请求的数据,如果不能,就调用请求函数来进行实际的I/O操作。块设备是主要针对磁盘等慢速设备设计的,以免耗费过多的CPU时间来等待. 已经提到,用户进程是通过设备文件来与实际的硬件打交道。每个设备文件都都有其文件属性(c/b),表示是字符设备还是块设备。另外每个文件都有两个设备号,第一个是主设备号,标识驱动程序,第二个是从设备号,标识使用同一个设备驱动程序的不同的硬件设备,比如有两个软盘,就可以用从设备号来区分他们。设备文件的主设备号必须与设备驱动程序在登记时申请的主设备号一致,否则用户进程将无法访问到驱动程序. 最后必须提到的是,在用户进程调用驱动程序时,系统进入核心态,这时不再是抢先式调度。也就是说,系统必须在你的驱动程序的子函数返回后才能进行其他的工作。如果你的驱动程序陷入死循环,不幸的是你只有重新启动机器了,然后就是漫长的fsck。 二、实例剖析 我们来写一个最简单的字符设备驱动程序。虽然它什么也不做,但是通过它可以了解Linux的设备驱动程序的工作原理.把下面的C代码输入机器,你就会获得一个真正的设备
USB设备驱动程序设计 引言 USB 总线是1995 年微软、IBM 等公司推出的一种新型通信标准总线, 特点是速度快、价格低、独立供电、支持热插拔等,其版本从早期的1.0、1.1 已经发展到目前的2.0 版本,2.0 版本的最高数据传输速度达到480Mbit/s,能 满足包括视频在内的多种高速外部设备的数据传输要求,由于其众多的优点,USB 总线越来越多的被应用到计算机与外设的接口中,芯片厂家也提供了多种USB 接口芯片供设计者使用,为了开发出功能强大的USB 设备,设计者往往 需要自己开发USB 设备驱动程序,驱动程序开发一直是Windows 开发中较难 的一个方面,但是通过使用专门的驱动程序开发包能减小开发的难度,提高工 作效率,本文使用Compuware Numega 公司的DriverStudio3.2 开发包,开发了基于NXP 公司USB2.0 控制芯片ISP1581 的USB 设备驱动程序。 USB 设备驱动程序的模型 USB 设备驱动程序是一种典型的WDM(Windows Driver Model)驱动程序,其程序模型如图1 所示。用户应用程序工作在Windows 操作系统的用户模式层,它不能直接访问USB 设备,当需要访问时,通过调用操作系统的 API(Application programming interface)函数生成I/O 请求信息包(IRP),IRP 被传输到工作于内核模式层的设备驱动程序,并通过驱动程序完成与UBS 外设通 信。设备驱动程序包括两层:函数驱动程序层和总线驱动程序层,函数驱动程 序一方面通过IRP 及API 函数与应用程序通信,另一方面调用相应的总线驱动 程序,总线驱动程序完成和外设硬件通信。USB 总线驱动程序已经由操作系统 提供,驱动程序开发的重点是函数驱动程序。 USB 设备驱动程序的设计
物理层设备 1.调制解调器 调制解调器的英文名称为modem,来源于Modulator/Demodulator,即调制器/解调器。 ⑴工作原理 调制解调器是由调制器与解调器组合而成的,故称为调制解调器。调制器的基本职能就是把从终端设备和计算机送出的数字信号转变成适合在电话线、有线电视线等模拟信道上传输的模拟信号;解调器的基本职能是将从模拟信道上接收到的模拟信号恢复成数字信号,交给终端计算机处理。 ⑵调制与解调方式 调制,有模拟调制和数字调制之分。模拟调制是对载波信号的参量进行连续地估值;而数字调制使用载波信号的某些离散状态来表征所传送的信息,在接收端对载波信号的离散参量进行检测。调制是指利用载波信号的一个或几个参数的变化来表示数字信号的一种过程。 调制方式相应的有:调幅、调频和调相三种基本方式。 调幅:振幅调制其载波信号将随着调制信号的振幅而变化。 调频:载波信号的频率随着调制信号而改变。 调相:相位调制有两相调制、四相调制和八相调制几种方式。 ⑶调制解调器的分类 按安装位置:调解解调器可以分为内置式和外置式 按传输速率分类:低速调制解调器,其传输速率在9600bps以下;中速调制解调器,其传输速率在9.6~19.2kbps之间;高速调制解调器,传输速率达到19.2~56kbps。 ⑷调制解调器的功能 ?差错控制功能:差错控制为了克服线路传输中出现的数据差错,实现调制解调器至远端调制解调器的无差错数据传送。 ?数据压缩功能:数据压缩功能是为了提高线路传输中的数据吞吐率,使数据更快地传送至对方。 ⑸调制解调器的安装 调制解调器的安装由两部分组成,线路的连接和驱动程序的安装。 线路连接: ?将电话线引线的一端插头插入调制解调器后面LINE端口。
虚拟设备驱动程序的设计与实现 由于Windows对系统底层操作采取了屏蔽的策略,因而对用户而言,系统变得 更为安全,但这却给众多的硬件或者系统软件开发人员带来了不小的困难,因为只要应用中涉及到底层的操作,开发人员就不得不深入到Windows的内核去编写属 于系统级的虚拟设备驱动程序。Win 98与Win 95设备驱动程序的机理不尽相同,Win 98不仅支持与Windows NT 5.0兼容的WDM(Win32 Driver Mode)模式驱动程序 ,而且还支持与Win 95兼容的虚拟设备驱动程序VxD(Virtual Device Driver)。下面介绍了基于Windows 9x平台的虚拟环境、虚拟设备驱动程序VxD的基本原理和 设计方法,并结合开发工具VToolsD给出了一个为可视电话音频卡配套的虚拟设备 驱动程序VxD的设计实例。 1.Windows 9x的虚拟环境 Windows 9x作为一个完整的32位多任务操作系统,它不像Window 3.x那样依 赖于MS-DOS,但为了保证软件的兼容性,Windows 9x除了支持Win16应用程序和 Win32应用程序之外,还得支持MS-DOS应用程序的运行。Windows 9x是通过虚拟机 VM(Virtual Machine)环境来确保其兼容和多任务特性的。 所谓Windows虚拟机(通常简称为Windows VM)就是指执行应用程序的虚拟环 境,它包括MS-DOS VM和System VM两种虚拟机环境。在每一个MS-DOS VM中都只运 行一个MS-DOS进程,而System VM能为所有的Windows应用程序和动态链接库DLL(Dynamic Link Libraries)提供运行环境。每个虚拟机都有独立的地址空间、寄存器状态、堆栈、局部描述符表、中断表状态和执行优先权。虽然Win16、Win32应用程序都运行在System VM环境下,但Win16应用程序共享同一地址空间, 而Win32应用程序却有自己独立的地址空间。 在编写应用程序时,编程人员经常忽略虚拟环境和实环境之间的差异,一般认为虚拟环境也就是实环境。但是,在编写虚拟设备驱动程序VxD时却不能这样做 ,因为VxD的工作是向应用程序代码提供一个与硬件接口的环境,为每一个客户虚 拟机管理虚设备的状态,透明地仲裁多个应用程序,同时对底层硬件进行访问。这就是所谓虚拟化的概念。 VxD在虚拟机管理器VMM(Virtual Machine Manager)的监控下运行,而VMM 实 际上是一个特殊的VxD。VMM执行与系统资源有关的工作,提供虚拟机环境(能产
TI-I2C驱动 一、与I2C驱动相关的文件分成两部分: 1)应用层接口部分: 程序在svn中的路径如下: 在https://dareglob-971006/svn/eocOS/branches/eocOS_v4/branches/bsp/user/i2c目录下,i2ctest.c文件,提供了lm75a_temp_read()方法,用来读取LM75A设备温度寄存器中的温度信息的功能。 2)内核驱动部分: 内核位于svn中的路径如下: https://dareglob-971006/svn/eocOS/branches/eocOS_v4/branches/bsp/kernel (1)总线驱动: i2c-davinci.c:在内核目录中driver/i2c/busses目录下,适用于TI的I2C总线驱动程序。I2C总线驱动是对I2C硬件体系结构中适配器端的实现。 (2)I2C驱动代码核心: i2c-core.c:在内核目录中driver/i2c/目录下,是I2C代码的核心,用于沟通虚拟文件系统与底层实现。该文件提供了I2C总线驱动和设备驱动的注册、注销方法,I2C通信方法上层的、与具体适配器无关的代码以及探测设备、检测设备地址的上层代码等。 (3)I2C设备驱动: lm75.c:在内核目录中driver/hwmon目录下,是针对LM75A以及其他能兼容的温度传感器的设备驱动。I2C设备驱动是对I2C硬件体系结构中设备端的实现,设备一般挂接在受CPU控制的I2C适配器上,通过I2C适配器与CPU交换数据。二、I2C简要工作流程 1)在总线驱动初始化时候,当通过Linux内核源代码/driver/base/platform.c文件中定义platform_driver_register()函数注册platform_driver结构体时,其中probe指针指向的davinci_i2c_probe()函数将被调用,以初始化适配器硬件。 2)而davinci_i2c_remove()函数则完成与davinci_i2c_probe()相反的功能。用于内存和中断等系统资源的释放和注销。 3)总线驱动i2c-davinci.c中,定义了i2c_davinci_xfer函数。该函数是I2C总线通信传输函数。并且I2C适配器对应的i2c_algorithm结构体实例为i2c_davinci_algo,其中的master_xfer函数指针指向i2c_davinci_xfer函数。 4)当设备被打开,并且用户开始读操作时,会调用设备驱动lm75.c中show_temp()函数,该函数会调用i2c-core.c中的i2c_smbus_xfer()函数,i2c_smbus_xfer()函数会检查适配器对应的i2c_algorithm结构体中是否注册了smbus_xfer函数(目前i2c_davinci_algo中未注册smbus_xfer函数),程序会调用i2c_smbus_xfer_emulated()函数,最终,还是会调用标准的I2C总线通信函数master_xfer(),由于master_xfer 已经指向i2c_davinci_xfer函数,所以会调用总线驱动i2c-davinci.c中的i2c_davinci_xfer函数来读取信息。 三、接口函数 1)应用层接口: Int lm75a_temp_read(float *temp) 读取lm75a 温度 2)内核中:lm75.c文件 static ssize_t show_temp(struct device *dev, struct device_attribute *da,char *buf)
一、课程设计目的 Linux 系统的开源性使其在嵌入式系统的开发中得到了越来越广泛的应用,但其本身并没有对种类繁多的硬件设备都提供现成的驱动程序,特别是由于工程应用中的灵活性,其驱动程序更是难以统一,这时就需开发一套适合于自己产品的设备驱动。对用户而言,设备驱动程序隐藏了设备的具体细节,对各种不同设备提供了一致的接口,一般来说是把设备映射为一个特殊的设备文件,用户程序可以像对其它文件一样对此设备文件进行操作。 通过这次课程设计可以了解linux的模块机制,懂得如何加载模块和卸载模块,进一步熟悉模块的相关操作。加深对驱动程序定义和设计的了解,了解linux驱动的编写过程,提高自己的动手能力。 二、课程设计内容与要求 字符设备驱动程序 1、设计目的:掌握设备驱动程序的编写、编译和装载、卸载方法,了解设备文件的创建,并知道如何编写测试程序测试自己的驱动程序是否能够正常工作 2、设计要求: 1) 编写一个简单的字符设备驱动程序,该字符设备包括打开、读、写、I\O控制与释放五个基本操作。 2) 编写一个测试程序,测试字符设备驱动程序的正确性。 3) 要求在实验报告中列出Linux内核的版本与内核模块加载过程。 三、系统分析与设计 1、系统分析 系统调用是操作系统内核和应用程序之间的接口,设备驱动程序是操作系统内核和机器硬件之间的接口。设备驱动程序为应用程序屏蔽了硬件的细节,这样在应用程序看来,硬件设备只是一个设备文件,应用程序可以象操作普通文件一样对硬件设备进行操作。设备驱动程序是内核的一部分,它完成以下的功能: 1、对设备初始化和释放; 2、把数据从内核传送到硬件和从硬件读取数据; 3、读取应用程序传送给设备文件的数据和回送应用程序请求的数据; 4、检测和处理设备出现的错误。 字符设备提供给应用程序的是一个流控制接口,主要包括op e n、clo s e(或r ele as e)、r e ad、w r i t e、i o c t l、p o l l和m m a p等。在系统中添加一个字符设备驱动程序,实际上就是给上述操作添加对应的代码。对于字符设备和块设备,L i n u x内核对这些操作进行了统一的抽象,把它们定义在结构体fi le_operations中。 2、系统设计: 2.1、模块设计:
驱动程序安装方法 初识电脑的人,可能为安装驱动程序而头疼。因为对驱动程序了解得不多就会在安装过程中走不少弯路,下面就给大家介绍一下安装驱动程序的两种常用方法和一些实用技巧。 一、安装即插即用设备的驱动程序 安装前的准备工作很重要,一般我们拿到要安装的新硬件时,首先要查看外包装盒,了解产品的型号、盒内部件及产品对系统的最低要求等信息。紧接着就要打开包装盒,取出硬件产品、说明书和驱动盘(光盘或软盘),认真阅读说明书或驱动盘上的ReadMe 文件,一般说明书上写有安装方法和步骤,以及安装注意事项。除了阅读说明书外,还应记得硬件产品上印刷的各种信息以及板卡产品使用的主要芯片的型号。这些信息就是确定产品型号及厂家的重要依据,只有知道这些,才能在网上查找最新的驱动程序。最后按照说明书上介绍的方法来安装硬件。通常安装内置板卡、内置驱动器,使用串口或PS /2接口的设备都应关机断电后再操作,而安装USB设备、笔记本电脑的PC卡时可以带电热插拔。当然,如果是Win2000系统则均可热插拔。完成前面的准备工作之后,就可以启动Windows 来安装驱动程序了。通常情况下,Windows 能够自动检测到PCI 卡、AGP卡、ISA卡、USB设备以及多数打印机和扫描仪等外设,并提示用户插入安装盘。以YAMAHA724声卡为例,其在Win98下安装驱动程序的详细步骤如下。 1.Win98在启动过程中会自动检测即插即用设备,一旦发现了新设备,并且在INF目录下有该设备的.inf 文件,系统将自动安装驱动程序;如果这是一个新设备,INF目录下没有相应的.inf 文件,那么系统就会启动硬件向导。我们单击“下一步”让安装向导自动搜索设备驱动程序,然后再单击“下一步”。 2.在图3中只选中“指定位置”,插入驱动光盘,并单击“浏览”,根据说明书的介绍,选择简体中文版驱动程序所在的目录“E:\Lx_so u n d /Yamaha /Win9X”,点“确定”后单击“下一步”。需要注意的是:Win95的安装向导没有自动搜索功能,我们必须选择“从磁盘安装”,并指定驱动程序所在的位置。驱动程序所在的目录通常是驱动盘上的“Win95”、“Win9X”或“Windows98”目录。 3.硬件安装向导会在指定目录下查找与设备相符的.inf 文件,此例中,硬件向导将在指定目录下找到并向作户报告发现YAMAHA724声卡驱动程序,继续按“下一步”。 4.硬件安装向导显示Windows 准备安装的驱动程序的信息,单击“下一步”后,硬件向导便会根据.inf 文件的内容把指定的文件拷贝到相应的目录下,并在注册表中写入相应的信息,安装成功后显示出对话框。 5.对多数设备而言,到这里驱动程序就算安装完毕了。但如果你安装的是声卡那就还未结束,因为刚才的步骤只能装完声卡的主体部分。单击“完成”后,Windows 又会报告发现了两个新硬件,分别是声卡的DOS 仿真部件和声卡上的游戏控制端口。由于此时SBPCI9X.inf 文件已经被拷到“Windows /INF /Other”子目录下,所以Windows 能够自动安装好这两种设备的驱动程序。 6.驱动程序安装完毕后,我们需要检查设备能否正常工作。检查前还要进行额外的设置,例如使用网卡之前必须先安装和设置网络协议,用调制解调器上网之前要先“新建连接”等。此例中,在“控制面板”里打开“系统”→“设备管理器”→“声音、视频和游戏控制器”,可以看见下面多了三个设备,只要设备的小图标上没有黄色惊叹号,就表示驱动程序运行正常。 二、安装非即插即用设备的驱动程序
#define _24cXX_H /* Includes ----------------------------------------------------------------*/ #include "stm32f10x.h" #include "value.h" //#include "stdbool.h" /* Define ------------------------------------------------------------------*/ /* EEPROM Addresses defines */ //注:32 64 的字地址是16位2个字节如果使用32或64请简单修改驱动即可 #define WC24cXX 0x00 // 器件地址写#define RC24cXX 0x01 // 器件地址读 #define USE_24C08 //使用24C08 #ifdef USE_24C02 #define MAXSIZE24cXX 256 // 总容量Bytes //级联时请修改本参数和硬件驱动 #define BLOCK_SIZE 256 // 块容量Bytes #define I2C_PAGESIZE 8 // 8个字节每页 #endif #ifdef USE_24C04 #define MAXSIZE24cXX 512 // 总容量Bytes //级联时请修改本参数和硬件驱动 #define BLOCK_SIZE 256 // 块容量Bytes #define I2C_PAGESIZE 16 // 16个字节每页 #endif #ifdef USE_24C08 #define MAXSIZE24cXX 1024 // 总容量Bytes //级联时请修改本参数和硬件驱动 #define BLOCK_SIZE 256 // 块容量Bytes #define I2C_PAGESIZE 16 // 16个字节每页 /* user define */ #define YBCV_ADDR_0 0x0000 //定义仪表控制数据结构体的EEPROM存储地址0 #define YBCV_ADDR_1 0x0200 //定义仪表控制数据结构体的EEPROM存储地址1 #define EEPROM_VERIFY YB_CTRL_V ALE_SIZE //EEPROM仪表通道修正参数存储地址 #endif #ifdef USE_24C16 #define MAXSIZE24cXX 2048 // 总容量Bytes #define I2C_PAGESIZE 16 // 16个字节每页 #endif
Linux中设备分类: 按照对设备的访问方式可分为以下三类: 1.字符设备(char device) (1)例如:键盘、鼠标、串口、帧缓存等; (2)通过/dev/下的设备节点访问;以字节为单位访问; (3)一般只支持顺序访问;(特例:帧缓存framebuffer) (4)无缓冲。 2.块设备(block device) (1)例如:磁盘、光驱、flash等; (2)以固定大小为单位访问:磁盘以扇区(512B)为单位;flash以页为单位。 (3)支持随机访问; (4)有缓冲(减少磁盘IO,提高效率)。 3.网络设备(network device) (1)无设备文件(节点); (2)应用层通过socket接口访问网络设备(报文发送和接收的媒介)。 设备驱动在内核中的结构: 1.VFS虚拟文件系统作用:向应用层提供一致的文件访问接口,正是由于VFS 的存在,才可以将设备以文件的方式访问。 2.虚拟文件系统,存在于内存中,不在磁盘上,掉电丢失。例如:/proc、/sys、 /tmp。
设备号: 1.作用:唯一地标识一个设备; 2.类型:dev_t devno;即32位无符号整型; 3.组成: (1)主设备号:用于区分不同类型(按功能划分)的设备; (2)此设备号:用于区分相同类型的不同设备。 注意:相同类型的设备(主设备号相同)可以使用同一个驱动。 4.构建设备号: int major = 250; int minor = 0; (1)dev_t devno = (major << 20) | minor;不建议使用; (2)利用宏来构建:dev_t devno = MKDEV (major, minor); 注意:我们可以通过文件$(srctree)/documentation/device.txt来查看内核对设备号的分配情况。 (1)该文本中的有对应设备文件的设备号是已经被申请过的,我们不可以重 复使用(申请); (2)从中可以看出,我们在编写驱动程序时可以使用的主设备号范围为 240~254,为了方便记忆,通常使用250作为主设备号。 字符设备驱动框架: 驱动:作用,为应用层提供访问设备的接口(对设备发的各种操作)。 一、申请设备号 1.构建设备号:dev_t devno = MKDEV (major, minor); 2.申请设备号: (1)动态申请:alloc_chrdev_region; (2)静态申请: register_chrdev_region。