第24卷 第2期
2009年4月
电力学报
JOU R NA L OF ELECT RIC P OW ER
V ol.24N o.2 A pr.2009
文章编号: 1005-6548(2009)02-0086-004
基于模糊理论的光伏发电
最大功率点跟踪控制策略研究
袁路路,苏海滨,武东辉,刘 强
(华北水利水电学院,郑州450011)
摘 要:介绍了光伏电池的特性,最大功率点跟踪原理和Boost 变换电路,提出了一种基于模糊逻辑控制的最大功率点控制策略,即将光伏电池和Boost 电路作为一个整体,通过检测负载功率的变化,来调整控制开关占空比,简化了系统。仿真结果表明,当外部环境发生变化的时候,系统能够迅速跟踪此变化,使系统始终工作在最大功率点附近,并具有较好的稳定性。
关键词:光伏电池;Boost 电路;最大功率点跟踪;模糊控制中图分类号:T M76 文献标识码:A
光伏发电系统是指能将太阳能直接转化为电能的装置,光伏电池电流-电压输出的非线性,加上日照、温度等因素的变化,其输出功率不断变化。为了提高整个系统的利用率降低造价,这也就是在理论和实践上提出了光伏系统最大功率点跟踪(Maximum Pow er Point Tracking ,MPPT)问题[1]。现在常用的最大功率点跟踪方法有扰动观测法[2]、恒定电压法[3]
、增量电导法[4]
、最优梯度法
[5]
等。这些方法存
在控制复杂、难于实现、扰动量无法确定等问题。本文提出了一种基于模糊控制的M PPT 控制方法,仿真结果表明此方法能够实现较好的控制性能。
1 光伏电源的跟踪原理
典型的多晶硅光伏电池的输出电压和电流关系为:
I =I LG -I OS {exp [q Ak T (V +IR S )]-1}.(1)
其中:I OS =I OR [T T r 3]ex p [qE GO B k (1T r -1
T )];
I LG =[I SCR +K 1(T -298)]
K 1000
.
各符号所代表的物理量:I LG 为光电流;I OS 为光伏电池暗饱和电流;q 为单位电荷(1.6@10-19);A ,B 为理想因子,一般介于1,2之间;k 为波尔兹曼常数(1.38@10
-23
);V 为光伏电池输出电压;R S 为光
伏电池的串联等效电阻;T r 为参考温度;T 为光伏
电池的实际工作温度;I OR 为T r 下的暗饱和电流;E GO 为半导体材料的禁带宽度;I SCR 为标准测试条件下光伏电池的短路电流;K 1为短路电流的温度系数;K 为日照强度。
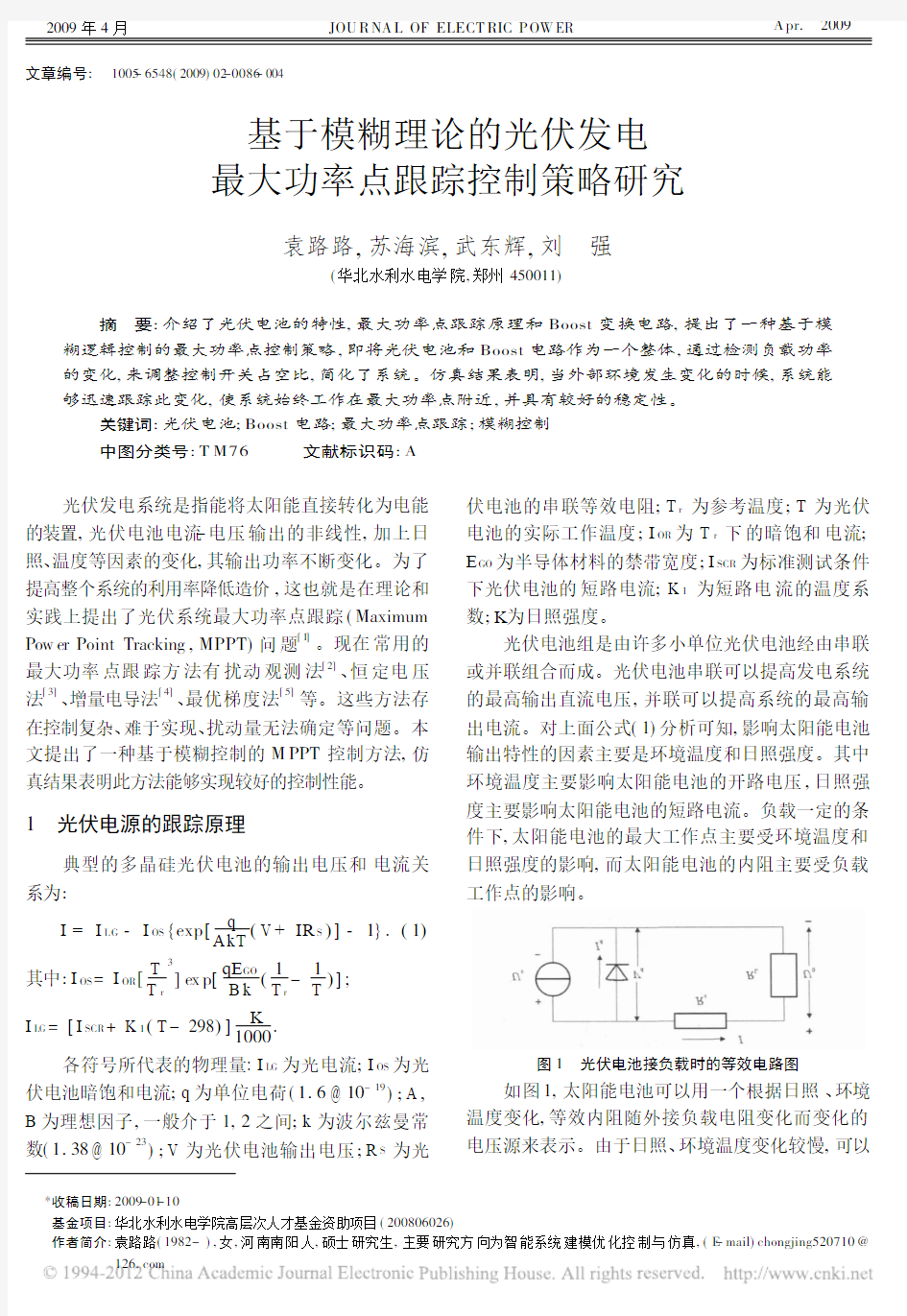
光伏电池组是由许多小单位光伏电池经由串联或并联组合而成。光伏电池串联可以提高发电系统的最高输出直流电压,并联可以提高系统的最高输出电流。对上面公式(1)分析可知,影响太阳能电池输出特性的因素主要是环境温度和日照强度。其中环境温度主要影响太阳能电池的开路电压,日照强度主要影响太阳能电池的短路电流。负载一定的条件下,太阳能电池的最大工作点主要受环境温度和日照强度的影响,而太阳能电池的内阻主要受负载工作点的影响。
图1 光伏电池接负载时的等效电路图
如图1,太阳能电池可以用一个根据日照、环境温度变化,等效内阻随外接负载电阻变化而变化的电压源来表示。由于日照、环境温度变化较慢,可以
*收稿日期:2009-01-10
基金项目:华北水利水电学院高层次人才基金资助项目(200806026)
作者简介:袁路路(1982-),女,河南南阳人,硕士研究生,主要研究方向为智能系统建模优化控制与仿真,(E -mail)chongjing520710@
https://www.doczj.com/doc/a31975475.html,
认为功率仅随负载变化,如图2所示,负载R L 上电压为:
U 0=
R L
R L +k c 2
R eq
k c 2U S
.图2 无M P PT 系统的简化电路图
由于太阳能电池的输出功率在整个工作区间内是单峰函数,当负载达到最大功率时则有:d U 0=0,那么:k c =
R L R eq ,U 0=U S
2
R L
R eq
,最大功率P max =U 2S 41
R eq .
其中,R eq 为光伏电池的等效电阻,U S 为光伏电池等效为理想电压源时的电压,k c 为理想因子。
可见,无论负载电阻如何变化,最大功率都是定值。
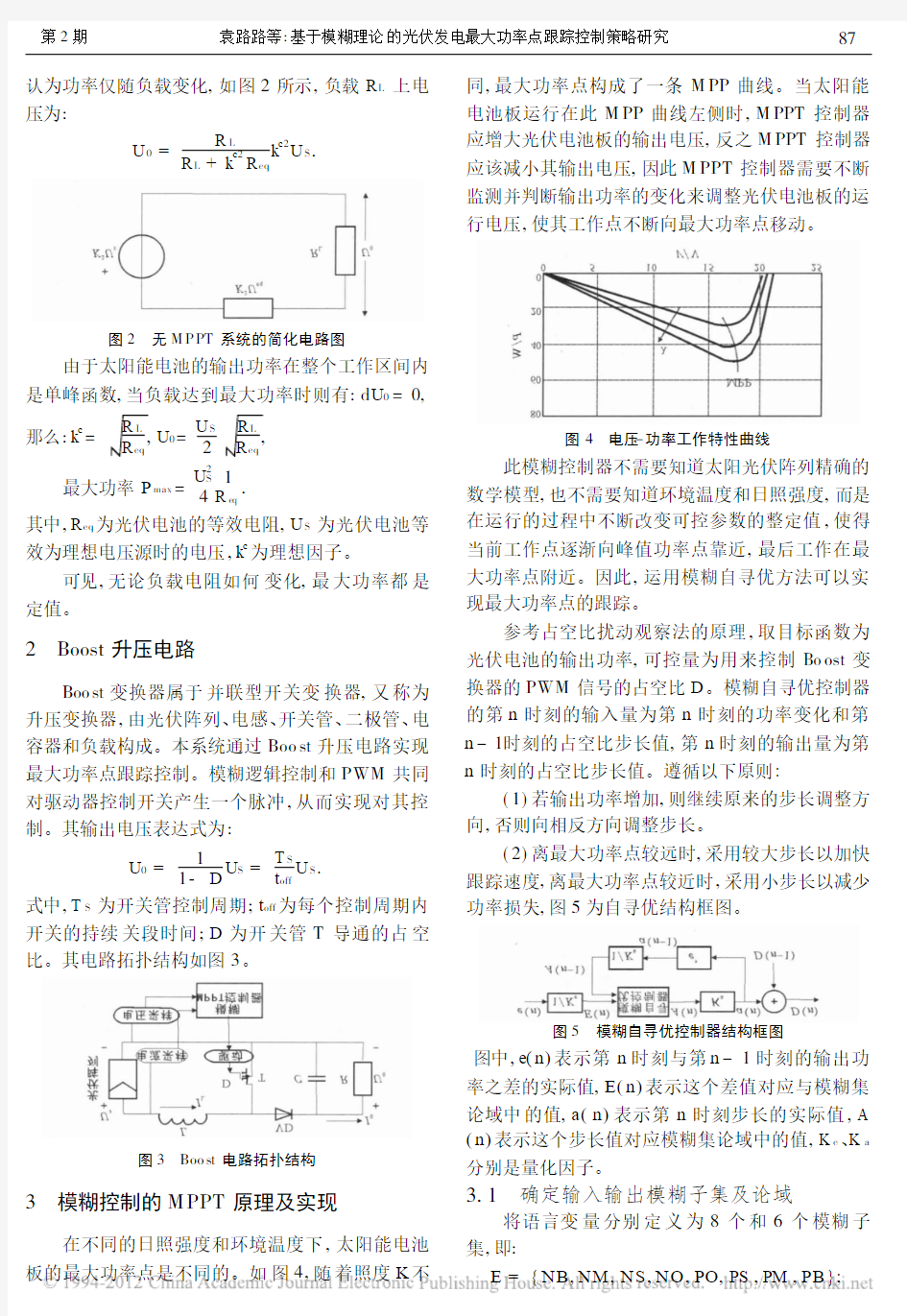
2 Boost 升压电路
Boo st 变换器属于并联型开关变换器,又称为升压变换器,由光伏阵列、电感、开关管、二极管、电容器和负载构成。本系统通过Boo st 升压电路实现最大功率点跟踪控制。模糊逻辑控制和PWM 共同对驱动器控制开关产生一个脉冲,从而实现对其控制。其输出电压表达式为:
U 0=
11-D U S =T S t off
U S .式中,T S 为开关管控制周期;t off 为每个控制周期内开关的持续关段时间;D 为开关管
T 导通的占空
比。其电路拓扑结构如图3。
图3 Boo st 电路拓扑结构
3 模糊控制的M PPT 原理及实现
在不同的日照强度和环境温度下,太阳能电池
板的最大功率点是不同的。如图4,随着照度K 不
同,最大功率点构成了一条M PP 曲线。当太阳能电池板运行在此M PP 曲线左侧时,M PPT 控制器应增大光伏电池板的输出电压,反之M PPT 控制器应该减小其输出电压,因此M PPT 控制器需要不断监测并判断输出功率的变化来调整光伏电池板的运行电压,使其工作点不断向最大功率点移动。
图4 电压-功率工作特性曲线
此模糊控制器不需要知道太阳光伏阵列精确的数学模型,也不需要知道环境温度和日照强度,而是在运行的过程中不断改变可控参数的整定值,使得当前工作点逐渐向峰值功率点靠近,最后工作在最大功率点附近。因此,运用模糊自寻优方法可以实现最大功率点的跟踪。
参考占空比扰动观察法的原理,取目标函数为光伏电池的输出功率,可控量为用来控制Bo ost 变换器的PWM 信号的占空比D 。模糊自寻优控制器的第n 时刻的输入量为第n 时刻的功率变化和第n -1时刻的占空比步长值,第n 时刻的输出量为第n 时刻的占空比步长值。遵循以下原则:
(1)若输出功率增加,则继续原来的步长调整方向,否则向相反方向调整步长。
(2)离最大功率点较远时,采用较大步长以加快跟踪速度,离最大功率点较近时,采用小步长以减少功率损失,图5为自寻优结构框图。
图5 模糊自寻优控制器结构框图
图中,e(n)表示第n 时刻与第n -1时刻的输出功率之差的实际值,E(n)表示这个差值对应与模糊集论域中的值,a(n)表示第n 时刻步长的实际值,A (n)表示这个步长值对应模糊集论域中的值,K e 、K a
分别是量化因子。
3.1 确定输入输出模糊子集及论域
将语言变量分别定义为8个和6个模糊子集,即:
E ={NB ,NM ,NS ,NO,PO,PS ,PM ,PB };
87
第2期 袁路路等:基于模糊理论的光伏发电最大功率点跟踪控制策略研究
A ={N
B ,N M ,NS ,PS ,PM ,PB }.
其中N B,N M ,N S,N O,PO,PS,PM ,PB 分别表示负大,负小,负零,正零,正小,正中,正大等模糊概念。并将他们的论域规定为14个和12个等级,即E ={-6,-5,-4,-3,-2,-1,-0,+0,
+1,+2,+3,+4,+5,+6};A ={-6,-5,-4,-3,-2,-1,+1,+2,+3,+4,+5,+6}.
a =(-0.058,0.058),e =(-50,50),为实际值的变化范围,通过量化因子把他们分别化归到模糊论域之中。
3.2 确定隶属函数
本文选择三角形隶属函数,其性能稳定,误差和步长的隶属函数如图6所示。步长靠近零点时变化较快,远离零点时变化较慢,三角隶属函数取不同的
斜率。
3.3 确定模糊控制规则
模糊规则建立的依据是光伏电池的输出功率是否能快速达到给定的要求范围,应用IF A AND B TH EN C 模糊规则,最后得到模糊规则表,如表1所示。
表1 模糊控制规则表
A E
N B N M N S N O PO PS PM PB N B PB PM P S PS N S N S N S N S N M PB PB PM PS N S N S N S N S N S PB PB PM PS N S N S PB N S PS N S N S N S N S PS PM PB PB PM N S N S N S N M PM PM PB PB PB
N S
N S
N S
N M
PM
PS
PM
PB
本文所提出的模糊控制方法在M atlab7.3的模
糊逻辑工具箱中选用mamdani 型控制器,即选择/交0方法为m in,/并0方法为m ax ,推理方法为m in,聚类方法为max ,解模糊的方法为重心法,其计算表达式如下:
a(n)=
E n
i =1
L (u i
)#u
i
E n
i=1
L (u i
)
.
式中,L (u i )是第i 个模糊输出量的隶属度,u i 为第i 个模糊输出量。n 为所定义的模糊输出量的个数,此处为6.
3.4 仿真实验
利用Simulink 搭建MPPT 模糊控制系统,如图8所示。其中PV 模块为光伏电池模型。主要的M PPT 功能由模糊控制器实现,S 函数实现D(n)=D(n -1)+a(n)的功能。经过反复试验,量化因子K A 取0.01,K e 取10。模拟外界因素,日照强度K 从600W/m 2
增大到900W/m 2
,光伏电池表面温度T =25e ,负载阻值R = 1.5688,并设仿真的最大步长0.025s,运行时间为6s,延迟时间为0.05s 。
当日照强度发生变化时,模糊控制器能实时调整占空比的步长,此时刻的占空比迅速提升,基本上没有波动。占空比D 的变化,直接调节负载电压,从而使负载功率也随之发生同方向的变化,如图9所示。模糊逻辑控制应用于光伏电池最大功率点的跟踪不仅跟踪迅速,而且到达最大功率点后基本没有波动,具有良好的动态稳态特性。实现并不复杂,并且取得了良好的控制性能。
88
电力学报 第24卷
4 结论
根据跟踪情况及太阳能电池表面温度和日照强度等外界环境因素的变化,提出的模糊逻辑控制法,不仅能够保证跟踪性能,又容易实现,而且解决最大
功率点附近震荡剧烈,步长难于确定,功率损失严重等问题。利用模糊逻辑控制来智能的调整步长,以动态适应环境的变化,实现实时跟踪。Simulink 仿真结果表明该算法能解决常规算法无法解决的问题,并取得了良好的控制性能。
参考文献:
[1] 候继红,雷元超,陈春根.高效光伏电源系统研究[J].电气传动自动化,2005,27(5):4-8.
[2] FU NABAS HI T,KOYANAGI K,YOKOYAM A R.A Review of Is landing Detection M ethods for Dis tributed Resources[J ].
Pow er T ech Conference Proceedings,IEEE.Bologna,2003,30(2):1-6.
[3] T AE Y K,H O G A,KYU P,et al.A Novel M aximum Pow er Point T racking Control for Ph otovoltaic Pow er System under
Rapidly C hangin g S olar Radiation[J].Proc IEEE Conf International S ymposium on Industria Electronics,Pusan,2001,20(5):1011-1014.
[4] 张超,何香凝.非对称PID 模糊控制在最大功率点跟踪中的应用[J].电工技术学报,2005,20(10):73-75.[5] 王传辉,罗耀华.模糊控制方法[J].应用科学,2008,35(3),42-45.
Control Strategy of Photovoltaic Maximum Power Point
Tracking Based on the Theory of fuzzy
YUAN Lu -lu,SU Ha-i bin,WU Dong -hui,LIU Qiang
(No rth China University of Water Conservancy and Electric Pow er,Zhengzho u 450011,China)Abstract:The characteristics of photovo ltaic pow er syetem,the m echanism o f M ax imum Pow -er Point T racking (M PPT )and boost converter are introduced.A fuzzy co ntro l M PPT system is presented.It takes PV module and boost co nverter as a w hole and directly control the duty cy cle of the bo ost converter acco rding to the load pow er chang e.It is simpler than uesd in the past.The ex perm ental results show the proposed system can track the M PP quickly,ex actly and steadily.
Key words:photovoltaic pow er sy etem;boost co nverter;max imum pow er point tr acking;fuzzy control
[责任编辑:张勇强]
国内首座大型太阳能光伏高压并网电站建成发电
2009年4月16日,国内首座大型太阳能光伏高压并网电站在青海省西宁市举行竣工典礼并运行发电,这标志着青海省太阳能光伏发电并入城市电网技术达到了国际先进水平。
这座光伏高压并网电站位于青海省西宁市经济技术开发区,占地面积1万m 2,安装太阳能电池组件300千kW,年发电量可达45万kW #h 。
据了解,该项目投资全部由日本新能源产业技术综合开发机构无偿援助,这是该机构在日本本土以外建设的规模最大的并网光伏电站。
青海省是全国太阳能资源最为丰富的省区之一,并且电网构架合理,是国内最适于发展大型、超大型光伏并网电站的省份。
89
第2期 袁路路等:基于模糊理论的光伏发电最大功率点跟踪控制策略研究
全过程跟踪控制方案 第一章绪言部分 第一节项目造价咨询的难点要点分析 第二节投资控制方案编制依据 第二章造价咨询服务工作计划 第一节投资控制的目标计划 第二节预算编制的工作计划 第三节施工过程控制的工作计划 第四节结算审核的工作计划 第三章招标阶段造价咨询工作方案 第一节造价咨询的工作内容 第二节预算编制基本要求 第三节预算编制工作流程 第四节预算编制主要方法 第五节预算编制要点及注意事项 第四章施工阶段全过程投资跟踪控制方案 第一节造价咨询的工作内容 第二节施工阶段全过程投资控制流程 第三节施工阶段全过程投资控制内容 第四节投资跟踪控制总目标及主要节点目标 第五节全过程投资跟踪控制方案 第六节造价控制偏差分析方法及纠偏措施 第五章竣工结算审核工作方案 第一节造价咨询的工作内容 第二节结算审核工作要点 第三节结算审核工作流程 第四节结算审核主要方法
第五节结算审核风险与防范措施 第一章绪言部分 第一节项目造价咨询的难点要点分析建设项目工程造价全过程投资跟踪控制是在新形势下产生的一项新的投资管理方式,也是工程造价由事后控制向事前、事中、事后的全过程控制的转变。投资跟踪控制作为现代投资管理一种重要方式,已经在大中型建设项目实施过程中被普遍实用,并且取得了明显的社会效益和经济效益。 1.预算阶段难点、要点分析概预算编制有时时间紧、任务急、工程数量繁杂,难免多算、漏算、重复计算,这就要加强审核力度,提高概预算编制的准确性。 ①审核工程量、审核采用的定额单价、指标是否合适 a)根据设计图纸、设计说明、施工组织设计的要求审核工程量。 b)定额具有科学性、权威性、法令性,它的形式、内容任何人都必须严格执行。审核采用的定额名称、规格、计量单位、内容是否满足施工方法要求,套用定额不同,单价则不同。 c)定额包含内容是否与设计相符。如定额含筋率、混凝土标号等。 d)补充定额是否符合要求,计算是否正确。 ②审核材料价格对材料价格、运杂费进行审核,材料价格是否包括运杂费,材料运输 方法、 措施是否符合实际,做到既要满足工程要求,又要努力降低费用。 ③其他费用 a)取费标准是否符合工程性质; b)费率计算是否正确; c)计算基数是否符合规定; d)价差调整是否符合规定。 2.结算阶段难点、要点分析 ①工程合同的不完全性决定了工程价款的不确定性 与一般货物购销合同不同, 工程合同是一种典型的不完全性合约。由于工程 本身的专业性、复杂性以及建设工程的契约商品性质, 工程合同不可能对所有事件及其对策做出详尽可行的规定, 不可能对违约造成的损失事先就规定补偿和解决办法, 合同履行结果对于相关第三方是难以证实和无法直观地确定的。为弥补 合同的不完全性, 合同各方需要在初始合同中考虑合同再协商谈判、修正对策的 设计问题,即在合同中建立一种机制来弥补缺口。因此, 工程合同的两个主要特 征是合同规划上缺口的存在和一系列的程序和技术的出现。以GF1999-0201《建 设工程施工合同》和FIDIC 施工合同条件为例, 两者在合同机制设计上均对初始合同以及再谈判程序进行恰当的安排。主要表现为: a)合同价款体现为初始造价和追加造价,是不确定的或待定的。工程合同价款一般由清单费用、工程变更费用、价格调整和索赔费用四个部分组成, 其中只有清单费用是相对确定的, 而变更费用、价格调整和索赔费用在合同签订时是不确定的, 而在实施过程中通过再协商谈判而不断调整。 b)对合同实施过程中的现协商谈判的程序和规则进行了详尽规定,例如:对计量与支付、工程变更费用、价格调整和索赔费用等方面双方的权利义务、程序、期限的规定。 c)在合同履行机制上,引入第三方合同机制:工程监理制度,重视过程管理。 ②工程管理的现实矛盾蕴含着无序和混乱, 制约着工程结算 a)工程合同的不完全性要求规范化管理,价款的不确定性要求加强过程管理但由于长期计划经济体制下形成的管理方式、管理手段的制约, 当前我国的合同管理极不规
全过程跟踪控制方案-CAL-FENGHAI-(2020YEAR-YICAI)_JINGBIAN
全过程跟踪控制方案目录 第一章绪言部分 第一节项目造价咨询的难点要点分析 第二节投资控制方案编制依据 第二章造价咨询服务工作计划 第一节投资控制的目标计划 第二节预算编制的工作计划 第三节施工过程控制的工作计划 第四节结算审核的工作计划 第三章招标阶段造价咨询工作方案 第一节造价咨询的工作内容 第二节预算编制基本要求 第三节预算编制工作流程 第四节预算编制主要方法 第五节预算编制要点及注意事项 第四章施工阶段全过程投资跟踪控制方案 第一节造价咨询的工作内容 第二节施工阶段全过程投资控制流程 第三节施工阶段全过程投资控制内容 第四节投资跟踪控制总目标及主要节点目标 第五节全过程投资跟踪控制方案 第六节造价控制偏差分析方法及纠偏措施 第五章竣工结算审核工作方案 第一节造价咨询的工作内容 第二节结算审核工作要点 第三节结算审核工作流程 第四节结算审核主要方法 第五节结算审核风险与防范措施
第一章绪言部分 第一节项目造价咨询的难点要点分析 建设项目工程造价全过程投资跟踪控制是在新形势下产生的一项新的投资管理方式,也是工程造价由事后控制向事前、事中、事后的全过程控制的转变。投资跟踪控制作为现代投资管理一种重要方式,已经在大中型建设项目实施过程中被普遍实用,并且取得了明显的社会效益和经济效益。 1.预算阶段难点、要点分析 概预算编制有时时间紧、任务急、工程数量繁杂,难免多算、漏算、重复计算,这就要加强审核力度,提高概预算编制的准确性。 ①审核工程量、审核采用的定额单价、指标是否合适 a)根据设计图纸、设计说明、施工组织设计的要求审核工程量。 b)定额具有科学性、权威性、法令性,它的形式、内容任何人都必须严格执行。审核采用的定额名称、规格、计量单位、内容是否满足施工方法要求,套用定额不同,单价则不同。 c)定额包含内容是否与设计相符。如定额含筋率、混凝土标号等。 d)补充定额是否符合要求,计算是否正确。 ②审核材料价格 对材料价格、运杂费进行审核,材料价格是否包括运杂费,材料运输方法、措施是否符合实际,做到既要满足工程要求,又要努力降低费用。 ③其他费用 a)取费标准是否符合工程性质; b)费率计算是否正确; c)计算基数是否符合规定; d)价差调整是否符合规定。 2.结算阶段难点、要点分析 ①工程合同的不完全性决定了工程价款的不确定性 与一般货物购销合同不同,工程合同是一种典型的不完全性合约。由于工程本身的专业性、复杂性以及建设工程的契约商品性质,工程合同不可能对所有事件及其对策做出详尽可行的规定,不可能对违约造成的损失事先就规定补偿和解决办法,合同履行结果对于相关第三方是难以证实和无法直观地确定的。为弥补合同的不完全性,合同各方需要在初始合同中考虑合同再协商谈判、修正对策的设计问题,即在合同中建立一种机制来弥补缺口。因此,工程合同的两个主要特征是合同规划上缺口的存在和一系列的程序和技术的出现。以 GF1999-0201《建设工程施工合同》和FIDIC 施工合同条件为例,两者在合同机制设计上均对初始合同以及再谈判程序进行恰当的安排。主要表现为: a)合同价款体现为初始造价和追加造价,是不确定的或待定的。工程合同价款一般由清单费用、工程变更费用、价格调整和索赔费用四个部分组成,其中只有清单费用是相对确定的,而变更费用、价格调整和索赔费用在合同签订时是不确定的,而在实施过程中通过再协商谈判而不断调整。 b)对合同实施过程中的现协商谈判的程序和规则进行了详尽规定,例如:对计量与支付、工程变更费用、价格调整和索赔费用等方面双方的权利义务、程序、期限的规定。 c)在合同履行机制上,引入第三方合同机制:工程监理制度,重视过程管理。
独立光伏系统的应用及 控制策略探讨 Document number:PBGCG-0857-BTDO-0089-PTT1998
独立光伏系统的应用及控制策略探讨 来源: 一、引言 近年来随着环境污染的不断加剧,环保意识的不断提高,人们对能源和环境问题日益关注,新能源的开发和应用取得了飞速的发展,其中以太阳能在军地的应用最为广泛。太阳能发电在解决边远山区和边防海岛连队供电难题中发挥了很大的作用,尤其是在总部提出构建“生态营区”的要求以后,太阳能同样在部队“生态营区”建设中发挥了重要作用,主要以光伏发电系统和太阳能热水系统为主,包括太阳能景观灯、太阳能路灯、太阳能发电系统、太阳能热水器、太阳能海水淡化系统等,都取得了广泛的应用。 通过对光伏系统在部队应用的广泛调研,分析整理资料和建议,得到三点启示:一是光伏系统在部队的应用会越来越广泛,以解决偏远营区的供电为主,其他多种形式的应用发展迅速;二是独立光伏系统中的能量控制策略过于简单,没有根据系统的容量大小进行具体的设计,造成能量的利用效率较低,储能蓄电池容易失效,运行成本较高;三是实行储能系统的分组充放电,能够有效地提高供电可靠性。 本文将对独立光伏系统在军营中的应用进行研究分析,同时对系统的能量控制策略进行研究,提出一种分组充放电控制策略,为解决光伏系统应用中存在的问题,提供了很好的参考。 二、光伏系统在军营中的应用 随着科学技术水平的不断发展,现在战争对于后勤电力的保障提出了更高的要求,要求我们必须拓展多种供电渠道,研究多种供电保障方式,以满足各种复杂条件下的供电要求;同时由于社会生活水平的不断提高,官兵对于居住环境也有了更高的要求,环保、绿色的军营更能营造一种积极健康的生活形态,同时激发官兵爱岗敬业的意识,而太阳能作为一种绿色能源,正好满足了以上要求。太阳能作为一种清洁、环保、绿色能源,在部队建设中发挥着越来越重要的作用,通过对光伏系统的应用调研,光伏发电在部队主要的应用和意义有以下五个方面: 1.解决了边防和海岛连队的供电保障难题。我军很多驻扎在边防和海岛的连队,以及很多驻地远离大电网的部队营区,基本上都存在着供电保障难的问题。目前,其用电主要是通过自备的发电机(组)来解决。很显然,这一方案存在发电成本较高、噪音大、污染环境、燃料运输成本高等的不足。随着新能源技术的不断发展,改善这些部队平时和战时的供电条件,已经越来越重要,其中以独立光伏发电系统和小型风力发电系统应用最为广泛。建设一个小型的独立光伏电站不但可以解决供电问题,同时可以减少运输燃油的费用,降低对于燃油的依赖。 2.户外独立工作站点的供电。对于各种微波中继站、户外检测点和航海灯塔等户外独立工作设备,常常远离电网,电网的延伸供电困难重重,光伏系统能够很好的解决这类室外工作站点的电源供电问题。 3.在部队“生态营区”建设中应用广泛。部队营区的改造和建设都以生态营区、环保营区、绿色营区为目标,一般都会根据营区所在地的自然环境条件进行新能源项目的论证,主要包括太阳能路灯、太阳能景观灯、光伏发电系统、风力发电等,其中以太阳能景观灯的应用最广泛。 4.为探索后勤供电保障的新方法提供了思路。拓展各种供电渠道,研究多种供电方式,光伏发电系统为现阶段探索后勤供电保障的新方法提供了思路。例如综合应用薄膜太阳能电池和新型储能装置(超级
光伏并网控制系统的最大功率点跟踪(MPPT)方法 2011年12月29日作者:周建华李冰郭玲田苗苗陈增禄来源:《中国电源博览》总第128期编辑:孙伟 摘要:最大功率点跟踪(MPPT)是光伏并网逆变器控制策略中的核心技术之一。本文首先介绍了光伏组件的输出特性,然后具体分析了3种典型的MPPT控制方法,并总结3种方法各自的特点和不足。 1 引言 日本福岛核电站事故之后,多国陆续宣布暂停核电建设,而太阳能是永不枯竭的清洁能源,并且更加稳定、安全。据国家权威数据,在“十二五”期间,中国光伏发电装机容量达到2000万千瓦。但由于光伏组件本身特性的非线性,受环境温度、日照强度、负载等因素的影响,均会使其输出最大功率点发生变化,导致光伏组件转换效率很低。而所有光伏发电系统均希望光伏组件在相同日照、温度条件下输出尽可大的功率,这就提出了对光伏组件最大功率点跟踪(Maximum Power Point Tracking,MPPT)的问题。本文首先讨论了光伏组件本身的P-V,I-V特性,以及温度、光照的影响;然后具体分析了几种常用的MPPT控制方法,并对3种MPPT控制方法作简单的比较。 2 光伏组件的特性 A. 物理数学模型 根据半导体物理学理论,太阳能组件的等效物理模型如图1所示。 其中: IPH 与日照强度成正比的光生电流; I0 光伏组件反向饱和电流,通常其数量级为10-4A;
n 二极管因子; q 电子电荷,; K 玻尔兹曼常数, J/K; T绝对温度(K); RS光伏组件等效串联电阻; RP光伏组件等效并联电阻; 式(1)中参数IPH、Io、Rs、RP、n与太阳辐射强度和组件温度有关,而且确定这些参数也十分困难。 B. 温度、光照对输出特性的影响 受外界因素(温度、光照强度等)影响,光伏组件输出具有明显的非线性,图2、图3分别给出其I-V特性曲线和P-V特性曲线。 由以上两图可知,光伏组件的输出短路电流(Isc)、最大功率点电流(Im)随光照强度的增强而增大。光照强度的变化对组件开路电压影响不大,最大功率点电压(Um)变化也不大,如图3-A所示。温度对光伏组件的输出电流影响不大,短路电流(Isc)随温度升高而略微增加。但开路电压(Uoc)受温度影响较大,开路电压随温度升高近似线性地下降,因此温度对光伏组件最大输出功率有明显影响,从图2-B曲线的峰值变化可以看出。
轮式移动机器人航向跟踪预估控制算法 龚建伟 黄文宇 陆际联 (北京理工大学机器人中心,北京 100081) 摘 要:本文提出了一种轮式移动机器人航向跟踪预估控制算法,航向预估量根据机器人前轮偏角和纵向速度实时得出,预估量与机器人实际航向之和作为控制反馈航向.仿真和实验时用PID 控制器和航向预估算法结合进行航向跟踪,结果表明该算法与常规PID 算法相比,对机器人纵向速度适应范围较宽,能有效地改善控制器的动态特性,表现出了较好的自适应能力. 关键词:轮式移动机器人;自主车;侧向控制;航向跟踪;预估控制 1 引言 Introduction 轮式移动机器人是一个具有大延迟、高度非线性的复杂系统,建立精确的数学模型十分困难,在进行航向跟踪控制时,参数的变化对系统模型影响较大,其中纵向速度的变化影响最为明显.轮式移动机器人航向跟踪一般控制方法是把期望航向与机器人实测航向之差作为控制器输入偏差,控制器输出控制量为机器人的前轮偏角.轮式移动机器人的航向与其纵向速度、横向速度、前轮偏角、机器人绕其重心的转动惯量、重心位置、前后轮侧偏系数以及实际道路情况等诸多因素有关,在常规控制方法中,只考虑了期望航向与实际航向的偏差,而未能包含其它因素的影响,因此难以达到满意的控制效果,当系统参数特别是某些敏感参数发生变化时,就必须重新设定控制器参数.例如,我们用常规PID 控制器进行航向跟踪实验,在某一纵向速度下整定好PID 控制参数,当纵向速度发生很小变化时,必须重新整定PID 参数,否则控制性能变坏,超调较大,甚至出现振荡.表现在路径跟踪实验中,则是在该速度下能较好地完成弯道或急弯等路径跟踪任务,而速度变化后,跟踪误差变大或出现大幅度振荡.因此,在轮式机器人航向跟踪控制中,控制方法应该能对纵向速度等影响因素有一定的自适应能力,航向跟踪预估控制方法就是在这一背景下提出的. 2 二自由度轮式移动机器人动力学模型 T wo Degrees of Freedom Dynamic Model for Wheeled Mobile Robot 当横向加速度和横摆角速度较小时,常采用经简化的二自由度轮式移动机器人动力学模型1,2,其微分方程如下: r f r f r f zz C aC v U bC aC r U C b C a r I 2) (2)(222=-+++ (1) f f r f r f s s C v U C C r U bC aC U M v M δ2)(2)(2=++??????-++ (2) 其中:I zz :轮式机器人绕重心的转动惯量(kgm 2); M s :轮式机器人质量(kg);C f 、C r :分别为前、后轮侧偏系数(N/rad);U :轮式机器人纵向速度(m/s);v :轮式机器人横向速度(m/s);a 、b :前后车轴到重心的距离(m);r :轮式移动机器人横摆角速度. 将轮式移动机器人转向机构视为一个惯性环节,则有: d f f δδδτ=+ (3) 其中:τ:惯性时间常数;δd :期望前轮偏角. 在航向跟踪控制过程中,可以令道路曲率为零,即不计实际路径的影响,航向变化率即为机器人的横摆角速度3,即: r =? (4) 其中:?为轮式移动机器人航向与期望航向的偏差角. (1)、(2)、(3)、(4)式联立即可得出以横摆角速度、横向速度、航向偏差角、前轮偏角即X=(r ,v ,?,δf )为状态变量的系统状态空间表达式. 3 航向预估算法原理 Heading Prediction Algorithm 在实际的航向控制过程中,控制器根据期望航向与采样航向得到航向偏差,再计算控制量,而当执行机构执行这一控制量时,要经过一个采样周期,这时机器人的实际航向已经改
光伏并网发电系统控制策略 能源危机和环境保护使大规模地开发利用可再生清洁能源受到人们的关注。太阳能储量的无限性、开发利用的洁净性以及逐渐显露出来的经济性等优势,使它的开发利用成为人类理想能源的替代能源。太阳能将会成为21世纪后期的主导能源。高性能的数字信号处理器芯片(DSP)的出现,使得一些先进的控制策略应用于光伏并网逆变器的控制成为可能。本文的主要内容:1.首先分析了光伏并网逆变器的结构和控制策略,本文使用改进的固定开关频率SPWM电流控制策略,较好地实现了并网逆变器的单位功率因数正弦电流输出控制。本文还使用状态空间平均法对并网逆变器进行了建模分析,然后使用MATLAB中的Simulink工具进行了系统仿真。通过仿真给具体的硬件设计提供了有效的帮助。2.最大功率点跟踪(Maximum Power Point Tracking)控制问题是光伏系统中经常遇见的问题。本文详细地分析了常用的几种MPPT控制方案,提出了新型MPPT控制算法。然后重点论述了本文设计的两级变换结构光伏并网逆变器MPPT 控制的实现过程。通过理论分析和具体实验,提出了对于两级变换结构的光伏并网逆变器使用DC-AC逆变器部分实现MPPT控制的控制方式。最后通过实验验证了本文提出的两级变换结构光伏并网逆变器MPPT控制方法的正确性。3.首先设计了系统的硬件电路,包括参数的选择,器件的选型等,然后又对基于DSP芯片的单相光伏并网系统进行了软件设计。在介绍了系统的硬件资源分配后,给出了系统软件的总体设计,给出了系统的流程图。4.最后给出了系统的实验结果,实验结果对实际控制过程中控制参数的选取提供的帮助。 同主题文章 [1]. 陈厚岩,许洪华. 3kW光伏并网逆变器' [J]. 可再生能源. 2005.(03) [2]. 焦在强,许洪华. 单级式并网光伏逆变器' [J]. 可再生能源. 2004.(05) [3]. 王飞,余世杰,苏建徽,沈玉梁. 采用最大功率点跟踪的光伏并网逆变器研究' [J]. 电力电子技术. 2004.(05) [4]. 杨伟昕,肖岚. 一种宽范围输入的光伏并网逆变器' [J]. 佳木斯大学学报(自然科学版). 2009.(06) [5]. 李进国,金新民. 小功率光伏并网逆变器控制系统的设计' [J]. 北方交通大学学报. 2003.(02) [6]. 雷珽,艾芊. 光伏并网策略及应用研究' [J]. 低压电器. 2010.(02)
第31卷 第4期 2008年8月 电子器件 Chinese J ournal Of Elect ron Devices Vol.31 No.4Aug.2008 Study T echnology of Maximum Pow er Point T racker on the Solar Cell 3 YA N G Fan 3 ,P EN G Hong 2w ei ,H U W ei 2bi n g ,L I Guo 2pi ng ,J I A N G Yan (College of Elect ronic and I nf ormation Engineering ,W uhan I nstit ute of Technology ,W uhan 430073,Chi na ) Abstract :Outp ut characteristic of t he solar battery in p hotovoltaic power 2generation system and t he princi 2ple of Maximum Power Point Tracker are int roduced.Bot h t he merit s and flaws of several t racing met hods in common usage are analysed.The emp hasis of t he st udy is Maximum Power Point Tracker based on quadratic interpolation.A system is designed to ascertain t he maximum power outp ut (M PO ),which is based on regular empirical approach and t he quadratic interpolation.The result of t he test indicates t hat t he M PO of solar battery can be ascertained very soon in t he quadratic interpolation.K ey w ords :solar cell ;quadratic interpolation ;Maximum Power Point Tracker EEACC :8250 太阳能电池最大功率点跟踪技术探讨 3 杨 帆3,彭宏伟,胡为兵,李国平,姜 燕 (武汉工程大学电气信息学院,武汉430074) 收稿日期:2007208220 基金项目:湖北省教育厅基金资助(20060271)作者简介:杨 帆(19662),女,硕士,硕士生导师,教授,主要研究方向为智能仪器与测控技术,yangfan188@https://www.doczj.com/doc/a31975475.html,. 摘 要:介绍了光伏发电系统太阳能电池的输出特性及最大功率点跟踪技术的基本原理。分析了多种常用的跟踪方法的优 缺点。重点研究了二次插值法的最大功率点跟踪技术。并设计了一个系统,应用常规实验方法及二次插值法寻找太阳能电池的最大输出功率,试验结果表明二次插值法能快速寻找太阳能电池的最大输出功率。 关键词:太阳能电池;二次插值;最大功率点跟踪 中图分类号:TP331 文献标识码:A 文章编号:100529490(2008)0421081204 太阳能作为绿色能源,具有无污染,无噪音,取之不尽,用之不竭等优点,越来越受到人们的关注。由于光伏系统目前的主要问题是电池的转换效率低且价格昂贵,因此,如何进一步提高太阳能电池的转换效率,如何充分利用光伏阵列转换的能量,一直是光伏发电系统研究的重要方向。太阳能光伏发电系统的最大功率点跟踪控制M PP T (Maximum Power Point Tracker )就是其中一个重要的研究课题。 最大功率点跟踪是太阳能并网发电中的一项重要的关键技术,它是指,为充分利用太阳能,控制改变太阳能电池阵列的输出电压或电流的方法,使阵列始终工作在最大功率点上,根据太阳能电池的特性,目前实现的跟踪方法主要有以下三种:太阳追踪、最大功率点跟踪或两种方法综合使用。出于经 济方面的考虑,在小规模的系统中经常使用最大功率点跟踪的方法[1]。M PP T 能使太阳能电池阵列的输出功率增加约15%~36%。 1 太阳能电池的伏安特性分析 太阳能电池的伏安(p 2u )特性如图1所示,图1(a )为温度变化时的p 2u 特性曲线,图1(b )是日照强度变化时的p 2u 特性曲线。从图可以看出太阳能电池具有明显的非线性。太阳能电池的输出受日照强度、电池结温等因素的影响。当结温增加时,太阳能电池的开路电压下降,短路电流稍有增加,最大输出功率减小;当日照强度增加时,太阳能电池的开路电压变化不大,短路电流增加,最大输出功率增加。在一定的温度和日照强度下,太阳能电池具有唯一
北京证券投资银行部 项目跟踪管理办法 为做好客户服务工作,及时发现解决问题,并对业务人员进行考核,特制定本管理办法。 一、在项目小组与企业签定协议,开始进场工作后十五个工作日内,业务部须 将项目小组名单、企业的通讯地址、传真和企业负责人联系方式通知管理 部。 二、由管理部负责项目跟踪管理工作的人员,依照联系方式,根据本管理办法 附件一的内容将项目反馈意见表等送达企业负责人。 三、在项目小组进场工作半个月后,由管理部项目跟踪管理人员督促企业,及 时将反馈意见初始表收回。 四、项目进展中的每三个月,由管理部项目跟踪管理人员按时将附件二项目跟 踪反馈意见期间表送达企业,并督促企业进行填写和收回。 五、项目发行结束后半年,继续由管理部项目跟踪管理人员将附件三项目回访 表送达企业,同时督促企业进行填写和收回。 六、管理部项目跟踪管理人员必须对每次反馈意见表的送达和回收情况进行登 记。 七、各业务部有义务配合管理部的项目跟踪管理工作,按时提供企业的地址等 情况。对违反规定者,将在业务部考核中进行相应处理。 八、管理部项目跟踪管理人员须对所收集到的反馈意见表的内容予以严格保 密。非经许可,该反馈意见表仅限投行管理部总经理及其以上领导阅读。 北京证券投资银行部 2001年7月20日
附件一: 尊敬的公司: 北京证券非常荣幸为贵公司提供(股份制改造、发行辅导、财务顾问、股票发行上市)服务,并真诚地希望能为贵公司的未来发展贡献我们的智慧和力量。 为提高服务质量,确保业务工作顺利开展,北京证券投资银行管理部,将对项目进行全程跟踪,对项目的质量和服务水平予以监督。我们将在项目人员进场半个月后,发出我们的调查表,并将每间隔一个月发出一份反馈意见表,以便我们了解业务人员的工作和项目进展情况,及时改进工作。希望贵公司能为我们提供宝贵意见,协助我们提高服务水平,确保圆满完成贵公司的工作。 本次为贵公司提供服务的是北京证券投资银行部()部。我们已派遣了以()为项目负责人的项目小组提供全部服务。我们还将根据不同阶段工作需要,增派其它业务人员。 我们将承诺恪守北京证券一贯的“诚信、高效、服务、进取”原则,为贵公司提供优质全面的服务,以使(改制、辅导、财务顾问、股票发行)工作获得圆满成功,贵我双方结成长期合作伙伴关系。 管理部联系人员和电话: E-MAIL信箱: 北京证券投资银行管理部 年月日 项目跟踪反馈意见表(初始表) 尊敬的公司: 经过一段时间的合作,我们希望贵公司能对项目小组的工作予以阶段性总结和评价,以便我们更好地根据贵公司的要求提供服务,我们将对填写的反馈意见表的内容予以保密。
全过程跟踪控制方案目录 第一章绪言部分 第一节项目造价咨询的难点要点分析 第二节投资控制方案编制依据 第二章造价咨询服务工作计划 第一节投资控制的目标计划 第二节预算编制的工作计划 第三节施工过程控制的工作计划 第四节结算审核的工作计划 第三章招标阶段造价咨询工作方案 第一节造价咨询的工作内容 第二节预算编制基本要求 第三节预算编制工作流程 第四节预算编制主要方法 第五节预算编制要点及注意事项 第四章施工阶段全过程投资跟踪控制方案 第一节造价咨询的工作内容 第二节施工阶段全过程投资控制流程 第三节施工阶段全过程投资控制内容 第四节投资跟踪控制总目标及主要节点目标 第五节全过程投资跟踪控制方案 第六节造价控制偏差分析方法及纠偏措施 第五章竣工结算审核工作方案 第一节造价咨询的工作内容 第二节结算审核工作要点 第三节结算审核工作流程 第四节结算审核主要方法
第五节结算审核风险与防范措施 第一章绪言部分 第一节项目造价咨询的难点要点分析 建设项目工程造价全过程投资跟踪控制是在新形势下产生的一项新的投资管理方式,也是工程造价由事后控制向事前、事中、事后的全过程控制的转变。投资跟踪控制作为现代投资管理一种重要方式,已经在大中型建设项目实施过程中被普遍实用,并且取得了明显的社会效益和经济效益。 1.预算阶段难点、要点分析 概预算编制有时时间紧、任务急、工程数量繁杂,难免多算、漏算、重复计算,这就要加强审核力度,提高概预算编制的准确性。 ①审核工程量、审核采用的定额单价、指标是否合适 a)根据设计图纸、设计说明、施工组织设计的要求审核工程量。 b)定额具有科学性、权威性、法令性,它的形式、内容任何人都必须严格执行。审核采用的定额名称、规格、计量单位、内容是否满足施工方法要求,套用定额不同,单价则不同。 c)定额包含内容是否与设计相符。如定额含筋率、混凝土标号等。 d)补充定额是否符合要求,计算是否正确。 ②审核材料价格 对材料价格、运杂费进行审核,材料价格是否包括运杂费,材料运输方法、措施是否符合实际,做到既要满足工程要求,又要努力降低费用。 ③其他费用 a)取费标准是否符合工程性质; b)费率计算是否正确; c)计算基数是否符合规定; d)价差调整是否符合规定。 2.结算阶段难点、要点分析 ①工程合同的不完全性决定了工程价款的不确定性 与一般货物购销合同不同,工程合同是一种典型的不完全性合约。由于工程本身的专业性、复杂性以及建设工程的契约商品性质,工程合同不可能对所有事
光伏电池及其最大功率点跟踪 1光伏电池 1.1 光伏电池简介 太阳能电池是一种由于光生伏特效应而将太阳光能即时转化为电能的器件。当太阳光照在半导体p-n结上,由于吸收了光子的能量,会形成电子--空穴对,在p-n结电场的作用下,空穴由n区流向p区,电子由p区流向n区,这使得相应区域的主载流子的浓度在靠近p-n结部分增加,而这种局部浓度的增加必然使得主载流子朝着外部接触面的方向扩散,导致外部端子上产生电压,接通电路后就形成电流。单体的单晶硅光伏电池的输出电压在标准照度下只有0.5V左右,常见的单体电池输出功率一般在1W左右,一般不能直接作为电源使用。单体电池除了容量小以外,其机械强度也较差。因此在实际应用中,将若干光伏电池单体串并联并封装起来成为有比较大的输出功率(几瓦到几百瓦不等)的太阳能电池组件。光伏电池组件再经过串并联就形成了光伏电池阵列,可以作为大型光伏并网逆变器的功率输入。
图2.1 太阳能电池单体、组件、方阵示意图 1.2 光伏电池数学模型 光伏电池的数学模型[12]可以由图2.2所示的单二极管等效电路[13]来描述。 图中L R 为光伏电池的外接负载,负载电压为L U ,负载电流为L I 。s R 和sh R 为光伏电池内阻。s R 为串联电阻,通常阻值较小,取决于体电阻、接触电阻、扩散电阻以及电极电阻等;sh R 为旁路电阻,一般阻值较大,取决于电池表面污染和半导体晶体缺陷引起的边缘漏电以及耗尽层内的复合电流等。VD I 为通过p-n 结的总扩散电流。sc I 代表光子在光伏电池中激发的电流,取决于辐照度、电池面积和本体温度T 。
L I L 图2.2 光伏电池的单二极管等效电路 )1(0-=AKT qE D VD e I I (2.1) 式中0D I 为光伏电池在无光照时的饱和电流。 旁路电阻两端电压s L L sh R I U U +=,流过旁路电阻的电流为 ()sh s L L sh R R I U I /+=。 由以上各式可得负载电流为: sh s L L AKT R I U q D sc L R R I U e I I I s L L +-???? ??--=+1) (0 (2.2) 一般s R 很小,sh R 很大,可以忽略不计。可得理想光伏电池特性: )1(0--=AKT qU D sc L L e I I I (2.3) 由式2.3可得 ??? ? ??+-=1ln 0D L sc L I I I q AKT U (2.4)
最大功率跟踪控制在光伏系统中的应用3X 赵庚申33,王庆章 (南开大学光电所,天津300071) 摘要:对最大功率跟踪控制中DC2DC变换器的原理和控制方法进行了实验研究,利用DC2DC转换电路和单片机控制系统实现最大功率点跟踪,使太阳电池始终保持最大功率输出;和普通的控制器相比增加输出功率5%~15%。 关键词:光伏(PV);最大功率点跟踪(MPPT);DC2DC变换器 中图分类号:TP206 文献标识码:A 文章编号:100520086(2003)0820813204 T racing and Control of Maximum Pow er Point in a PV System ZHAO G eng2shen33,WAN G Qing2zhang (Institute of Photoelectronics,Nankai University,Tianjin300071,China) Abstract:Principle and control method of DC2DC conversion for MPPT in a solar cell system experi2 mentally discussed.MPPT was implemented with a DC2DC conversion circuit and a MCU control system,and more output power of5to15percent than common control mathod was achieved. K ey w ords:photovoltaics system(PV);maximum power point tracking(MPPT);DC2DC conversion 1 引 言 独立光伏系统一般是由储能蓄电池电压来选择太阳电池输出电压,而对蓄电池的充放电控制则是通过监控蓄电池的电压实现,控制工作电压在一定程度上可以调节太阳电池的输出。但太阳电池的最大功率点是变化的。当太阳电池的最大功率点超出所控制的范围时,就会浪费一部分能源。因此,为了有效利用太阳能,就必须跟踪控制太阳电池的最大功率点来调节太阳电池的输出;同时将蓄电充电电压限制在一定的范围,以保证蓄电池有稳定的电压。在并网发电光伏系统中,通过跟踪控制太阳电池的最大功率点来调节太阳电池的输出,可以随时将系统富裕的电能馈送到常规电网,最大限度地利用太阳能。 DC2DC变换器是通过控制电压的方法将不控的直流输入变为可控的直流输出的一种变换电路,被广泛应用于开关电源、逆变系统和用直流电动机驱动的设备中[1]。用DC2DC变换器可以实现最大功率点的跟踪(MPPT)。实际使用中用DC2DC变换器实现MPPT有不同的方法,其中谐振法是利用开关型电压逆变器的输出电压,通过电感、电容产生谐振,电感上的电压通过变压器和桥式整流向蓄电池充电。该方法可以通过改变工作频率来调节输出电压和电流,实现MPPT,但线路较复杂,需用中间变压器,本文将DC2DC变换器接入太阳电池的输入回路,并将对DC2DC变换器的输入、输出电压和电流测量结果通过单片机的分析运算,由单片机输出PWM脉冲调节DC2DC转换器内部开关管的占空比来控制太阳电池的输出电流,从而使蓄电池电压保持恒定。同时通过控制开关管的占空比也可调节太阳电池输出。由于采用了升降压式(buck2boost)DC2DC转换电路[2]来实现MPPT,所以该方法电路简单、软硬件结合、控制方法灵活。 2 MPPT原理和控制方法[3] 2.1 升降压式DC2DC变换电路 升降压式DC2DC转换电路原理如图1。在开关管Q1处于导通状态时,电源给电感L充电,L上的 光电子?激光 第14卷第8期 2003年8月 J ournal of Optoelectronics?L aser Vol.14No.8 Aug.2003 X收稿日期:2003203212 3 基金项目:“十五”国家重大科技攻关资助项目(2002BA901A44) 33E2m ail:zhaogs@https://www.doczj.com/doc/a31975475.html,
太阳跟踪控制方式 国内外,太阳跟踪系统中实现跟踪太阳的方法很多,基本上可以分为两类:一类是实时的探测太阳对地位置,控制对日角度的被动式跟踪;另一类是根据天文知识计算太阳位置以跟踪太阳的主动式跟踪。文献中介绍了被动式跟踪的典型代表:压差式跟踪器和光电式跟踪器;主动式跟踪的典型代表:控放式跟踪器、时钟式跟踪器和采用计算机控制和天文时间控制的视日运动轨迹跟踪器。以下对两种类型中目前主要采用的光电跟踪 方式和视日运动轨迹跟踪方式进行比较。一般地,在聚光光伏发电的应用多采用校准 的光筒,它可以阻止散射进入传感器达到更精确的太阳位置探测。 (1)光电跟踪 虽然光电跟踪方式本身的精度较高,但是它却具有严重的缺点:在阴天时,太阳辐照度较弱(而散射相对会强些),光电转换器很难响应光线的变化;在多云的天气里,太阳 本身被云层遮住,或者天空中某处由于云层变薄而出现相对较亮的光斑时,光电跟踪 方式可能会使跟踪器误动作,甚至会引起严重事故。对于太阳能发电来说,是可能在 晴朗、阴天和多云等任何天气情况下进行的。光电跟踪能够在较好的天气条件下,提 供较高的精度,但是在气象条件差时跟踪结果不能令人满意。 (2)视日运动轨迹跟踪 视日轨迹跟踪的原理是根据太阳运行轨迹,利用计算机(由天文学公式计算出每天中日出至日落每一时刻的太阳高度角与方位角参数)控制电机转动,带动跟踪装置跟踪太阳。此跟踪方式通常采用开环控制,由于太阳位置计算与地理位置(如纬度、经度等)和系 统时钟密切相关,因此,跟踪装置的跟踪精度取决于一是输入信息的准确性,二是跟 踪装置参照坐标系与太阳位置坐标系的重合度,即跟踪装置初始安装时要进行水平和 指北调整。 太阳跟踪机构 双轴跟踪 如果能够在太阳高度和赤纬角的变化上都能够跟踪太阳就可以获得最多的太阳能, 全跟踪即双轴跟踪就是根据这样的要求而设计的。双轴跟踪又可以分为两种方式:极轴式全跟踪和高度角方位角式全跟踪。 1)极轴式全跟踪。
焊缝跟踪的控制算法 (一)理论模型 虚线 Y( t )为焊炬的跟踪调节曲线, 可视作系统执行机构的输出量,即 : ()()t Y t S t dt =? 传感器在焊缝坡口 B 点的偏移量e1(t )实际上是 R ( t )曲线上B 点相对于 Y( t )上 A 点的偏差量,即 1()()()()()t e t R t Y t R t S t dt τ τ-=--=-? 设焊接速度V ( mm/ s),则焊接点 A 滞后检测点B 时间为:V λ τ= (s ) 再设()S τ是焊炬从t τ-时刻到t 时刻的调节量,即: ()()t t S S t dt τ τ-=? 则焊炬行走 时间后与坡口中心的实际误差应为: ()1()()1()()t t e t e t S e t S t dt τ τ-=-=-? 理论上 ,只要知道机械系统的传递函数, ()S τS 便可 知道 ,但实际系统 的传输 函数 往往很难准确得到,因此△S 直接求解比较困难 焊接起始点 实际焊缝的坡口中心曲线 焊枪的跟踪曲线
(二)由模型得出的简易控制算法 实际的焊缝跟踪过程中,视觉系统提供的位置偏差是经过传感器经过一帧一帧的图像采 集后,再经过一系列的图像处理,最终得出位置偏差信息提供给控制器。因此,需做以下设定: (1) 位置请求指令发送时间间隔和执行机构调整时间间隔同步; (2) 在每次位置请求时,在上一调整周期内焊枪已完成所需的调整量; (3) λ为采样间隔点的整数倍。 设O 点为初始参考点,O 0为焊枪开始纠正起始点,从O 点到O 0点,视觉传感器只做图像采集,焊枪并不进行跟踪,这一段距离属于“盲区”。i e 为每次识别的坡口中心点与初始参考点之间的差值,i m 为每一步的焊枪实际跟踪量。 系统焊枪实时跟踪量m i 的算法为: 1 () i i i a i i a m e m ---=-∑ ( i=a ,a+1, ···,n ) 焊接方向
大型光伏电站无功电压控制策略 周林邵念彬 (重庆大学输配电装备及系统安全与新技术国家重点实验室,重庆 400030) 摘要:对于大型光伏电站有功出力的波动不仅会造成并网点电压越限也会造成电站内部局部电压过高导致保护动作使得逆变器脱网。分析了光伏电站并网点电压及站内各光伏发电单元并网电压的影响因素提出了一种考虑站内电压分布的大型光伏电站无功电压控制策略。该控制方法通过实时检测并网点电压与参考值比较,并通过PI控制器自动获取维持并网点电压所需的无功需求量实现并网点电压的动态调节通过实时调节逆变器的无功输出实现站内电压均匀分布。应用灵敏度的分析方法表示无功与电压间的关系给出了PI控制器参数的设计过程并将以站内电压均匀分布为目标的无功优化问题转化为可以快速准确求解的带约束条件的非线性规划模型,对该模型进行求解计算出无功补偿装置及各组光伏发电单元的无功参考量在保证并网点电压稳定的基础上改善站内电压分布保证光伏电站的稳定运行。最后通过仿真计算验证了该控制策略的正确性和可行性。 关键词:光伏;发电;大型光伏电站;电压波动;无功控制;电压控制;灵敏度;电压分布 中图分类号:TM 615 文献标识码:ADOI:10.16081/j.issn.1006-6047.2016.04.018 0引言 近年来随着光伏产业迅速发展,系统成本不断降低,光伏并网技术逐渐成熟,建设大型并网光伏电站成为大规模利用太阳能的有效方式[1]。不同于分布式光伏发电,大型光伏电站多建立在荒漠地区,当地负荷水平较低,所接入地区电网的短路容量较小,大量的光伏电力需要高压长距离输电线路外送[2-3]。由于光伏发电受光照影响较大,光照的波动会引起有功输出的波动,从而导致并网点电压波动甚至越限[4],因此大型光伏电站必须具备无功电压控制能力[5]。 目前针对光伏电站电压控制的研究多集中在分布式发电领域。分布式光伏发电的调压方式主要有利用储能装置[6 - 7]、无功补偿装置、逆变器无功功率控制[8]。储能装置可以平抑有功波动但会增加系统成本,且控制复杂;无功补偿装置调压忽略了逆变器的无功输出能力;逆变器无功功率控制主要针对本地负载的无功补偿,不能实现光伏电站的无功独立控制。此外,德国电气工程师协会提出了适用于分布式光伏发电的4种无功控制策略:恒无功功率Q 控制、恒功率因数cos φ控制、基于光伏有功出力的cosφ(P)控制及基于并网点电压幅值的Q(U)控制策略[9]。但这4 种控制策略仅针对单台逆变器,并不适用于大型光伏电站。 不同于分布式光伏发电,大型光伏电站内部无功源包括逆变器和无功补偿装置,因此大型光伏电站的无功电压控制必然涉及逆变器与无功补偿装置以及各逆变器的协调控制。文献[10]提出了以并网点电压以及并网点功率因数为控制目标的控制策略;文献[11]将大型光伏电站内部的无功源分为3层,提出了3层无功控制策略。但以上文献都只针对并网点电压进行控制,未研究电站内部的电压分布情况。 大型光伏电站通常由多组光伏发电单元PVGU(PV Generation Unit)组成,每组PVGU 分别通过升压变压器汇入送端配电站,然后以相应的电压等级实现远距离高压交流输电[12]。虽然目前尚无规范对站内PVGU并网电压做出具体规定,但由于站内集电线路的存在,随着有功出力的增加,可能会导致线路末端PVGU 电压过高,从而导致保护装置动作,使得