安徽大学
硕士学位论文
全息成像的研究
姓名:柴晓冬
申请学位级别:硕士专业:计算机应用
指导教师:韦穗
2003.5.8
竖主堡塞全星堕堡箜堑塞一——
Abstract
Thisthesisaddressesthetheory,numericalcomputingandtechnologyofdynamical
realize
holographydisplaybasedonholovideo(real—timedisplay).Itisimpossibleto
dynamicandreal—timedisplayfortypicalopticalholographywheretherearetwo
independencecoursesofopticalholographicrecordingandopticalholographicdisplay.
However,dynamicalholographicdisplayisinteractive3-Ddisplay.Ithasmany
applications.TypicalComputerGeneratedHolography(CGH)andhologramsynthesis
thatsimulatetypicallyopticalholographyneedtocomputeahuge2-Dholographicfringe,
ortolosesome3-Djnformationandresolutiontoreducedata.Thefirstreal—time
displayofholographicimageswasreportedin1990bytheMITSpatialImagingGroup
Butthisisstillaflopenproblembecauseviewangleofholographicimages,volume
andspeedoftransmitarelimited.
Thisthesiscoversthemethodsofcomputingholographyaswellastheprincipleofthe
3-Dimagingbasedonthediffraction-specificapproach,thekeytopicsareencoding
anddecodingoffringebasedoncomputer-generatedholography(CGH).Anew
methodofencodinganddecodingoffringeareproposedusingwavelettransformto
establishanewtransformmodel.Itisfastandsimpletocomputebasisfringebyusing
thewaveletpackage.Experimentalresultsshowtheobviousadvantageandrobustness
ofourmethods.Inthisthesis,westudythealgorithmofholographicstereogram
displaythatCanbeimplementedusingCGH.Wediscusstheimagingprocessthrough
capturingsequenceparallaximages,illuminatinghologrambyaplanewavecreatesthe
volumeeffectintheobserver’Seyes.Themethodofcompressingbandwidthoffringe
functionisproposedthatbasisfringecontainsdiscretespectrumwhichisbasedon
Humanvisionforreal—timedisplay.wealsointroducediscussesthespatiallight
modulators(SLMs)basedOndisplaysystemofdigitalholographyandtheoryof
numericalreconstructionof
digitalholography.Asaexample,wereconstructphaseof
beamreflectedbyanimperfectmirror.
lightwavefronttoperfect
Thetopicwehavetackledareasthefollowing,
(1)Numericalsimulationforlightpropagationandvisualizationoflight-field
distributionofFresnaldiffractionandFraunhoferdiffractionwith
(2)Computationanddisplayofhologrambymethodofsimulation—anneal
博士论文全息成像的研究
(3)Hologramcomputationofapointsourcebasedonmethodofinterferencehologramcomputation.
(4)Computationofbasisfringefunction,analysisofspectrumofbasisfringe,andrealizationbasisfringephysicsmodelbywavelettransformbasedontheMIT’Sdiffraction-specificapproach.
(5)MethodofbandwidthcompressionofholographicgratingbasedondiscretespectrumandRealizationofa1/8BandwidthCompressionofholographicgrating(6)Holographicstereogramdisplaythatcar/beimplementedusingCGHandimagingprocessthrou曲capturingsequenceparallaximagesbasedonresultofcomputedbasisfringe.
(7)NumericalreconstructionofphaseoflightwavefrontByperfectbeamreflectedbyanimperfectmirrorindigitalhologrambyCCDcapturing.
Chaixiaodong
(TheKeyLaboratoryofIntelligentComputingandSignalProcessing,MinistryofEducatiom
4
博士论文全息成像的研究
论文摘要
本论文以迥塑全星星委为目标,讨论毯查全墨星委的理论、逛查堇!±箜方法和技术实现等问题N经典的光全息由波阵面记录与重现这两个独立过程构成,因此
无法实现全息显示的动态和实时性。而动态全息显示可真正实现交互式真三维显示,应用领域极其广阔l蛐l。传统的研究集中在计算机生成全息图(computer—generatedholography,简称CGH)和全息图综合的方法上,采用模拟光全息的物理方法,从而导致数据量庞大,无法在现有硬件上完成实时处理,或者靠损失部分三维信息和分辨率以减少数据量,但失去了真三维显示的效果13,4'j。1990年美国麻省理工学院(MIT)媒体实验室s.A.Benton为首的空间成像小组采用全息视频的新方法,首次实现了动态全息显示I51。但图像的视角、体积和传输速率受到较大的限制,这既给动态全息显示带来了希望,也给该方法的进一步研究留下了一定的空19。本论文就是在这样一个背景下开展研究的。少论文首先研究了计算全息方法,然后以视频全息显示为目标,讨论了面向衍射的动态三维成像方法。对基于计算机的三维全息成像中的光栅编、解码理论进行了研究,在此基础上,将小波变换方法应用到全息显示中,建立新的变换模式下的光栅编、解码算法,计算中采用小波包分解方法,使全息条纹的计算更加快速、便捷。同时利用光栅的编码结果实现了一个具有三维感的全息立体图显示。
为了达到实时性要求,在满足人眼视觉的光信息量基础上,对带宽压缩的理论问
题进行了研究,提出了基于离散频谱的带宽压缩算法,并给出了结果。最后讨论
了数字全息显示系统中的空间光调制器特性,对数字全息重构也进行了理论分析,
模拟重构了镜面反射物波波阵面的相位。
厂
、\i论文中具体完成了以下工作:
~
l、对光的传播特性进行了数值模拟,以可视化方式表现了菲涅耳衍射和夫琅禾费衍射的光场分布。
2、用模拟退火算法实现了全息图的计算及显示。
3、在基于干涉全息图的计算方法上,计算了一个点光源的干涉全息图和相位分布。
4、在面向衍射的三维成像方法上,用小波变换方法计算基本条纹,用小波包
的分解法直接获得基本条纹函数,给出了条纹函数的物理特性。
5、提出了基于离散频谱的带宽压缩算法。采用空间频率域的子采样,计算了一个8倍的条纹函数压缩编码结果,并给出了简单易行的解码方式。
6、利用获得的基本条纹函数合成了一个基于序列视差图像的立体图显示,实现了三维数据未知的物体的三维全息显示。
7、对CCD获取的镜面反射物波波阵面的干涉全息图,数字重构了其波阵面相位并给出了算法。∥
,
1引言
1.1研究背景
人类获得的信息约80%来自视觉,人们对视觉的要求几乎是无止境的。物质世界中的对象都是三维的,人们对物质构成的分子级、细胞级、多维场的数据可视化、人机交互、虚拟装配、虚拟加工、三维艺术、娱乐等提出了真三维显示的要求。目前表达可视信息的主要手段是二维的,包括图纸、显示屏。二维图像的显示技术虽然在多方面满足了人们的需要,但由于缺乏临场感,自然界的真三维特征无法重现。用二维表现三维物体时必须做投影,在投影中失去了很多的三维信息,由照相机和CCD摄象机获取的图像信息,只记录了表示物体明暗的强度,无法记录表示物体深度的相位,虽然人们采用了各种方法来增加图形的真实惑,在计算机图形学中采用了消除隐藏线\面、明暗\阴影处理等技术,这些技术产生了一定的三维效果,但不是包括全部深度感的真三维图像,计算机图形只能生成平面图像,虽然能绘制“三维图像”,人类视觉系统(HVS)看到的仍然是平面像素。19世纪中叶,照相技术的发明使得人们对三维显示技术有了研究,主要有体祝镜、视差挡板、集成照相,投影式三维显示,但这些技术只能提供全部深度感中的一种或几种,不是真正的三维显示技术。真正的三维显示技术,应该提供全部深度感,而光全息技术就是这样一种技术,它是由科学家DennisGabor在1948年发明的,它实现了物体的三维信息的记录与三维影像的重现16I。
光全息方法一般分为记录与重现两个过程:一个刚体被一束相干光束照射,用相干的参考光准直的去干涉刚体发出的散射光,所产生的微小的干涉模式(条纹模式)被记录到高分辨率的光敏介质上(例如感光胶片)。记录的干涉模式不仅包含了物体的强度信息,还包含了物体的相位信息,物理上称为记录了物体的物波波阵面,或称全息图。因此,一个二维全息图包含了物体三维信息。重现时,用相同的干涉光照射冲洗后的胶片,则记录的条纹会衍射照明的光束,形成三维图像。它看上去和原物一样。条纹能衍射光是因为它的特征大小一般在可见光的波长量级(大约0.5mm)。由于这样微小的分辨率,条纹模式包含无数的信息量——每平方毫米大约1亿可分辨的特征,远远超过人类的视觉分辨率(humanvisionsulofion简称HVS)111o光全息虽然能实现物体的三维显示,但分为波阵面记录与重现这两个独立过程,无法满足动态、实时的需求。早在1964年,研究者
就开始考虑计算、传输和用全息条纹合成图像甚至是动态图像,这些研究者碰到计算全息固有的基本问题:全息图像的计算和显示都异常困难。因为包含在一个条纹模式中的信息是巨大的。粗略的说,为计算一个离散(采样)的条纹以匹配光产生全息的分辨率,每平方毫米须1亿个采样值,一张全息图须计算100亿采样值(10mm×lOmm),同时,用这样一个条纹模式去调制入射光也超出当时的任何空间光调制技术的范围。几十年来,全息条纹的巨大容量阻止了人们对动态全息显示的追求。
1.2国内外研究现状
近年来,计算机技术和微电子技术迅猛发展,给动态全息显示带来了希望。世界上几个先进国家开始对这一领域进行研究,取得了一些进展,但面临挑战。2000年,在美国召开的“CriticalTechnologiesfortheFutureofComputing”专题会议上,C.D.Cameron等科学家发表了题为“Computationalchallengesofemergingnoveltrue3Dholographicdisplays”的报告,提出了真三维全息显示和具有三维感的图像显示的挑战性及重要性盯1。
真三维显示提供了真实的场景,能获得单眼或双眼的视觉深度。是一种无须借助眼镜、头盔等辅助设备观看的自动三维成像方法,不仅给观看者带来舒适、方便,同时可供多人观看。这些三维成像大致可分为以下几类:
(1)光全息:利用相干光照射物体,物体的反射光和透射光与参考光干涉生成全息条纹,然后由光路重现。生成的全息条纹能提供全部深度感知信息。由于物波波阵面的记录与重现分为两个独立过程,因此无法实现动态显示。
(2)视差显示:双眼获得不同方向、不同强度及物体不同表面信息的图像,从而获得物体的深度信息。例如,在观察区域内通过电可控的光栅栏阵列对一对CRT图像进行控制。控制单元收集到观察者的位置,动态安排液晶光栏以引导光向观察者传播。因此,能提供运动视差。但这种3一D显示只有有限的观察角以及观察范围内视点位置的不连续性。利用全息综合法也能提供这种具有三维感的视差图像。
(3)体显示:体显示能生成三维图像。它在确定的(x,Y,z)空间形成扫描光点,从而创建三维图像。它包括在透明感光层上生成体像数和多平面的体显示,即快速运动三维物体的2一D切片图像,利用人眼的视觉特性组合成3一D显示。例如,利用激光照射一个旋转的漫射屏,含有序列切片的2一D图像的光线经过人
眼视觉的综合产生3一D图像。体显示能创建3一D图像,但失去如阴影、遮挡、纹理梯度的视觉深度信息,也不能提供足够的深度重叠信息。
(4)视频全息显示:它结合了全息技术与计算机技术,采用计算机对物波函数、三维数据已知物体或对物体的体视图编码生成全息图,由空间光调制器生成衍射光栅,实现对输入光波的调制,通过水平和垂直的扫描镜产生动态的真三维全息图像,且提供了全部深度感。是实现动态全息显示的主要方法。
在以上方法中,视频全息显示方法实现了包含全部深度信息的动态三维全息显示,是目前最佳的动态显示方法。
从国外在该领域的研究情况看,1990年美国麻省理工学院(MIT)媒体实验室S.A.Benton为首的空间成像小组利用全息视频技术,在美国ARPA(AdvancedResearchProjectAgency)、NSF(NationalscienceFoundation)和IBM、NEC、Kodar、Intel、Phlips、Sun、Microsoft等世界著名企业和组织的大力资助下,取得了突破性的进展【5I,于1990年首次生成30mmX30ramx30mm的实时、具有水平视差的三维全息图;1992年又生成了150mmX75mmX160mm真彩的实时、三维全息图像,1994年以后,MarkLucente研究的快速算法对三维全息图的带宽进行了压缩,使得三维显示实时性更强。2000年,MIT和日本大坂城市大学相继研究出实时的三维全息空间成像系统吼2000年波兰华沙大学SutKowsKi.M、KnjawinsKa.M以数字全息概念开展了用高分辨率液晶二维CCD和高精度距离选通技术直接获取物体的灰度和相位信息的研究。近几年来,美国华盛顿大学HIT实验室发展利用低功率激光器,通过一视网膜显示器,使形成图像的激光束能直接被人的视网膜接收到,以达到使人能在空间直接观察一高亮度三维图像的目的,并在航空、军事等领域得到重要应用。瑞士洛桑大学在全息显微领域作了大量的工作,基于菲涅耳衍射,采用数字全息重构方法显示了细胞变化的三维图像142I。日本、韩国等科研人员通过CCD获取物体系列视差投影图像,采用全息图综合方法生成具有三维感的全息图像,全息电视的研究在国外也悄然进行,已能显示静态或动画图像191。
以上成果给全息三维显示带来了希望,但也存在不足,其不足之处表现在:(1)视角范围、图像体积有限(3)没有获得特别有效的全息光栅(全息图)的计算方法(4)由于全息计算数据量巨大,导致动态显示异常困难。(5)受目前使用的空间光调制器(SLM)的空间带宽积的限制,衍射角受到影响。
从国内研究情况看,对视频全息的研究甚少。但)ll'-J大学物理系在光全息显
示方面作了研究工作,并利用液晶光阀显示了静态的2D全息图像。苏州大学现代光学研究所较早开展了数字全息的研究,并通过激光刻蚀技术,在新材料上生成特定图像的特定基元全息光栅的方法,衍射生成三维全息图像。上海光机所等院所在x光衍射方面开展了研究工作,通过x光全息,研究材料的结构。
1.2论文的研究内容
动态全息显示涉及面广,综合性强,加之本人知识面有限,因此,论文主要在理论与算法上进行了有限的探讨,重点在以下方面开展了研究工作并给出了结果:
(1)从成像角度出发,研究光的菲涅耳衍射和夫琅禾费衍射。
对光的菲涅耳衍射和夫琅禾费衍射公式采用离散化处理,给出了数值计算
公式,利用图形方式直观显示了菲涅耳衍射和夫琅禾费衍射的特性。由此实现
了光衍射的物理现象的可视化,显示了数字模拟方法的优越性,从而更好的理
解了光的衍射特性,也为基于衍射的条纹生成方法提供了理论基础。
(2)研究了计算全息方法。
计算全息结合了全息技术、计算机技术和多种数学方法。由于采用计算机处理,则必须将光信号离散化,而离散化的光信号实质是数字信号,因此光信息处理与数字信号处理存在相关性,快速傅立叶变换(FFT)、数字信号的卷积与相关、小波变换等均可应用到光信息处理中。本论文在计算全息的算法研究中,重点研究了快速生成全息图的两种算法,即模拟退火算法和基于干涉的全息图计算方法,结论显示,这些算法在速度上优于傅立叶变换法。
(3)基于小波变换的全息光栅的编、解码算法。
目前,三维全息图生成方法有:基于干涉的计算全息图,傅立叶变换全息图,面向衍射的基本条纹生成全息图,由CCD获取的基于序列视差图像的综合全息图,空间频率和衍射方向可变的基元全息图等。在这类全息图中,基于干涉的计算全息图,傅立叶变换全息图则完全模拟光全息的原理,因而,计算量大。在由CCD获取的基于序列视差图像的综合全息图中,人们获得的是具有三维感的三维显示,并不包含全部的深度信息。在空间频率和衍射方向可变的基元全息图中,全息条纹由光刻在新材料上形成空间频率和衍射方向不同的物理模式,不能做为条纹函数或图像送入空间光调制器,显示是静态的。MIT空间成像小组1994年提出一种面向衍射的光栅编、解码方法,拚弃了机械地模拟光全息的物理过程的作法,
条纹的计算仅基于发生在全息图像重构时的衍射现象,采用逆向方法求解光栅条纹,较好的实现了动态三维全息显示,是目前最成功的一种方法。但在该方法中,基本条纹的生成较为复杂,我们在研究了他们的方法后,采用了基于小波变换的基本条纹生成方法。与傅立叶变换相比,小波变换是空间和频率的局部化分析,可聚焦到信号的任意细节,使基本条纹的频谱特征成为空间频率域的局部细化的表现。计算中采用了小波包分解方法,以Daubechies小波为基,利用伸缩和平移运算功能,实现了空间频率域的带通滤波器组,从而快速实现了基本条纹的计算。小波包分解方法具有计算速度快,简便易行、有自动适应空间一空间频率域的信号分析的特点,为基本条纹的计算提供了新方法。
(4)基于离散频谱的带宽压缩算法。
在研究中,我们发现,可利用人眼的视觉分辨率有限的特性,对光信息可作进一步压缩。在600mm观察一个点发出的两根光线时,如果其夹角小于0.30,人眼感觉不到光线的跳变。因此,可对条纹的空间频率采样进行研究。结果表明,用包含离散频谱条纹的衍射光来重构波阵面,条纹函数的样本值可得到有效的压缩,而在显示时通过简单的解码过程,即可恢复全部的条纹函数样本值和连续的光频谱。这样,就可有效减少数据量,达到动态显示的目的。
(5)基于序列视差图像的立体图显示方法。
在基于MIT面向衍射算法基础上,研究了任意物体的双眼视差的三维全息显示。通过CCD获取的序列视差图像,用计算全息与图像处理技术产生了一个全息立体图的显示。在计算全息中采用了基于衍射的光栅条纹生成方法,将视场分为连续的8个区域,每个区域由一个空间频率不同的基本条纹衍射生成,然后对序列视差图像经过二维离散处理,通过光场投影与几何光学成像法,转换到一张全息图上,由包含8个基本条纹的全息素衍射生成序列视差全息图像。从而使观察者获得三维感的立体图像,为三维数据未知的物体和场景的三维显示提供了依据。(6)数字全息重构方法的研究。
从光的菲涅尔衍射公式入手,对连续信号进行了离散化处理,给出了菲涅尔衍射数值计算公式。研究了波阵面相位恢复与数字全息重构的计算方法。用傅立叶变换法从干涉全息图中恢复了物波的波阵面,重构了物波的波阵面的三维光场分布,给出了结果。
1.3论文的结构
论文以动态全息显示为主线,从光的物理特性出发,以数字信号处理为基础,研究了全息光栅的计算、带宽压缩与显示方法。本论文共由九个部分组成。第一部分为引言,论述了本论文选题的国内外研究现状及论文研究的内容。第二部分介绍了光的传播特性,对菲涅耳衍射与夫琅禾费衍射的复光场分布进行了数值模拟,以图形方式给出了结果,对光波的衍射过程提供了可视化方法,为今后的理论研究创造了条件。第三部分研究了计算全息方法,介绍了傅立叶变换全息图的罗曼113I编码方法,重点研究了模拟退火算法和基于干涉的全息图计算方法,并给出了两种计算方法数值计算结果。第四部分重点介绍了三维全息显示的编码方法,特别是基于衍射的光栅条纹计算方法,采用了小波变换法、傅立叶变换法计算基本条纹。结果表明,小波变换法具有更强的鲁棒性。在带宽压缩方面,提出了基于离散频谱的带宽压缩方法,使解码更加方便,速度得到有效提高。第五部分研究了基于视差的具有三维感的全息显示方法,并用基本条纹的光栅实现了一个用系列视差图像生成的全息立体图显示结果,为三维数据未知的物体和场景的三维显示提供了依据。第六部分研究了全息显示的空间光调制器的特性,对适合于视频全息显示的声光调制器(AOM)的特性进行了阐述。介绍了数字光处理器(SLP)的芯片DMD的原理及线性相位分布与频谱特性。第七部分研究了数字全息重构,给出了菲涅耳衍射和夫琅禾费衍射的数值计算方法,对基于CCD获取的干涉全息图的波阵面恢复方法进行了研究,并实现了镜面反射光的波阵面相位恢复,为数字全息重构方法提供了研究基础。第八部分介绍了体显示的方法与实现的可行性,为基于体显示的三维显示提供了参考依据。第九部分提出了今后研究的工作,希望在该领域的研究中能有新的突破。
1.4论文的创新点
(1)、对菲涅耳衍射与夫琅禾费衍射的复光场分布进行了数值模拟,以图形方式给出了结果,对光波的衍射过程提供了可视化方法。
(2)、将全息计算与电信号处理理论紧密结合,把光栅的空域与信号处理中的时域、光栅的空间频率域与电信号处理中的频域相对应,使全息显示在计算方法、实现手段上与电信号处理方法具有对偶性,从而使全息计算更加有效。
(3)、将小波变换应用与全息光栅的基本条纹的计算中,计算速度快、易于实现。(4)、在MIT研究人员MarkLucent的“基于衍射的光栅条纹编码方法”基础上,根据人眼视觉分辨率的特性,提出对空间频率域进行重采样,研究离散频谱编码
博士论文全息成像的研究
的理论与算法,有效降低了带宽,为动态全息显示和光信息处理提供了新的思路。
近期论文发表情况:
1、柴晓冬,利用isp器件实现可编成PCM采编器,通信技术,2001.6
2、X.D.Chai,D.W.Ding,S.Wei,Waveltanalysisforholographicbasisfring,Secondanalysisforholographicbasisfring.SecondInternationalConferenceonImageandGraphics,SPIEVOL.4875(2002)(已被EI收录,光盘版)
3、柴晓冬,全息显示中数码光栅的计算,计算机工程与应用,2002.12
4、柴晓冬,基于序列视差图像的全息立体显示方法,东南大学学报2003.3
5、柴晓冬,光场分布的数值计算与数字重构,量子电子学报2003.4
6、柴晓冬,基于声光调制器AOM的数字光栅的计算,中国激光(修改稿已寄出)7、柴晓冬,三维全息显示中数码光栅的几种计算方法,中国图像图形学报(修改稿已寄出)
8、柴晓冬,三维全息显示中的全息光栅的带宽压缩,光学学报(已投稿)
(a)(b)
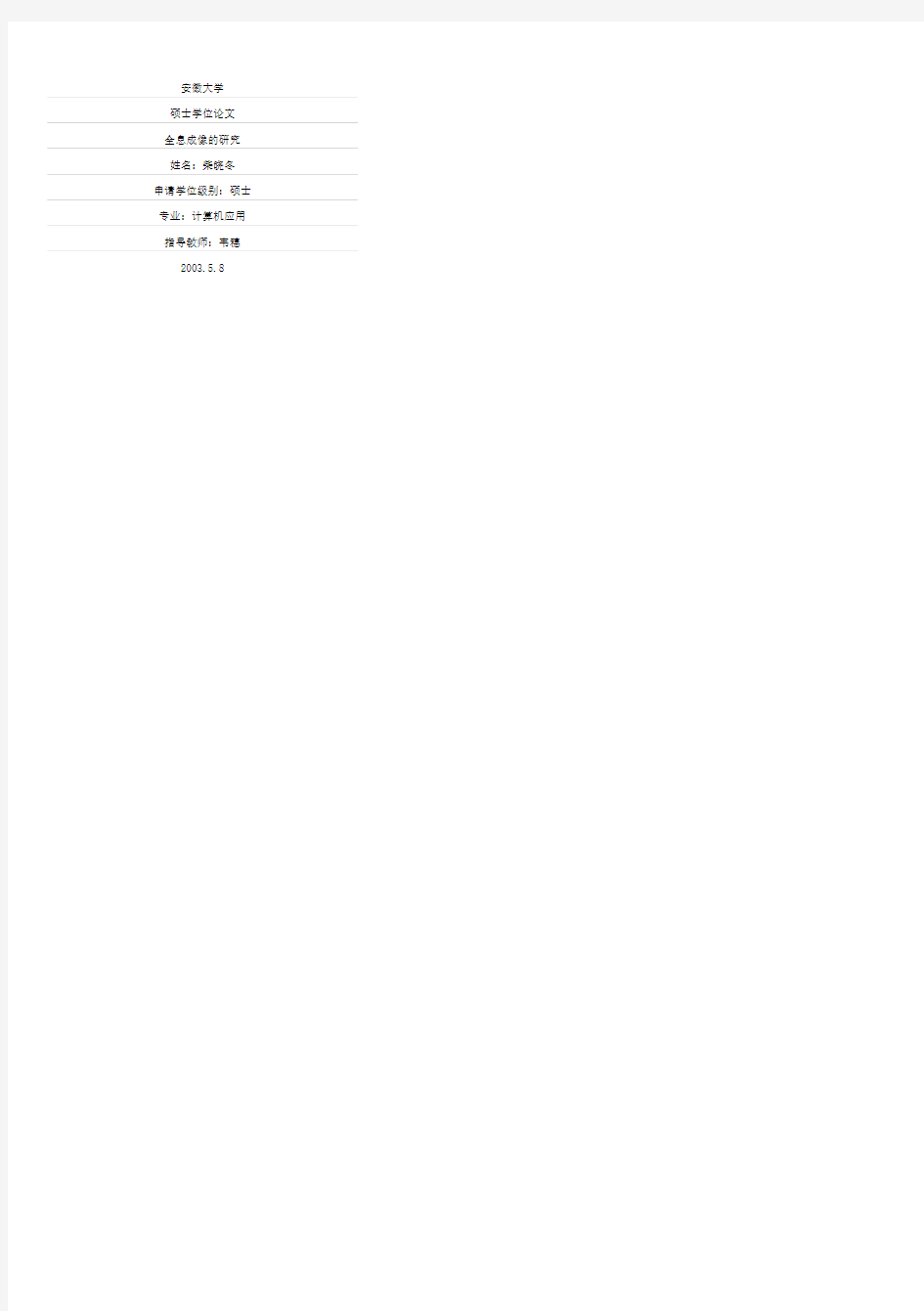
图2-1平面波通过矩形孔径的相位分布
(a)z=Om的光场相位分布(64×64samples)
(b)z=3m的光场相位分布(64×64samples)
(2)设g(x,Y)为一圆形孔径的光孔函数,光孔半径为25mm,单色平面波的波长兄=1000nm。其传播3m后,其中m,71,k,Z,均取64采样点,为64Z64的网格。根据所在空间位置的值,将相位在~万,石之间作空间相位展开,获得连续的相位分布,如图2所示。从图1和图2可看出光在传播中的相位变化情况。
(c)
图2-2平面波通过圆形孔径的相位分布
(a)z=Om的光场相位分布(64×64samples)
(b):=3m的光场相位分布(64×64samples)
(c)Z=5m的光场相位分布(64X64samples)
16
2.2夫琅禾费衍射及其光场分布的数值模拟
当光波通过孔径的传播距离进一步增加时,衍射图样的相对强度关系不再改变,只是衍射图的尺寸随距离的增加而变大,幅度随之降低,这个区域称夫琅
禾费衍射区,或称远场衍射。
在菲涅尔衍射公式中,对衍射采取更强的限制条件,即取:
z>>妄92+叩2)七时,(2)式为:
∥(工,y,z)=÷exp(i2nz/2)expp兰二(工2+J,2)】
tagZZ
。_J批(砌,0)exp{-i芸隧堋)】趔,7
2—3
2-3式为夫琅禾费衍射公式,在近似条件下,观察平面的场分布等于衍射孔径上场分布的傅立叶变换和一个二次相位因子的乘积。对于只响应光强,不响应相位的一般光探测器,夫琅禾费衍射即为光场的傅立叶变换。图2.3为矩形孔径的夫琅禾费衍射。
图2-3矩形孔径的夫琅禾费衍射
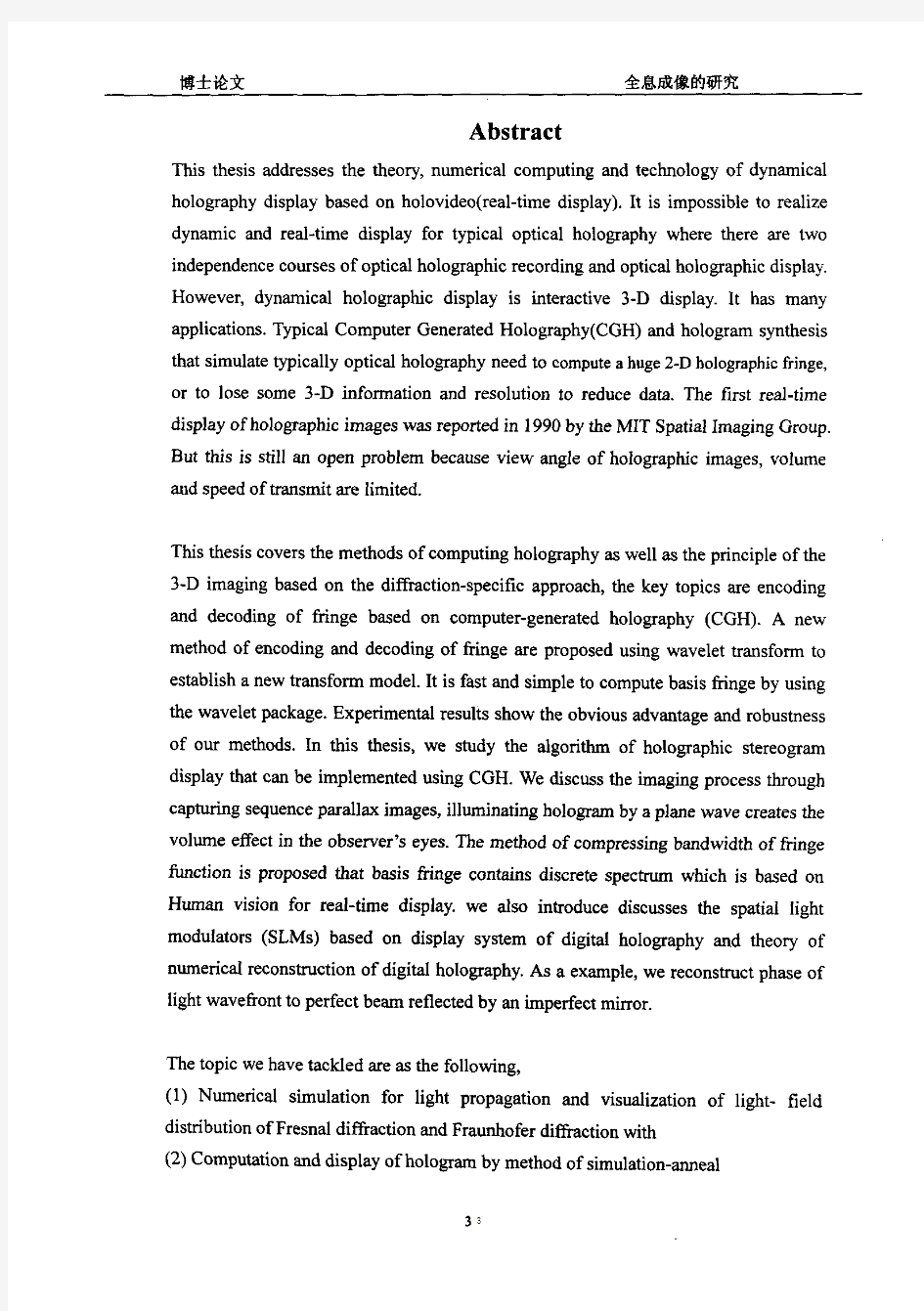
图2.4为方型孔径内(0.25ram×O.25ram)含余弦型振幅光栅的夫琅禾费衍射结果光栅的空间频率为125mm一,透过率调制度为1/2,透过率函数为:
,(x,J,)=‘i1+i1c。s(2万?128工)】,ecr‘百惫),e甜‘i蠢Y5)
图2-4余弦型振幅光栅的夫琅禾费衍射的模拟计算
左上图:余弦型振幅光栅透过率函数
右上图:余弦型振幅光栅的夫琅禾费衍射的光强分布
下图:余弦型振幅光栅的夫琅禾费衍射的图样
衍射结果看到,中间为零极光,左右两边为+1和一1极光强,实际表现的是余弦型振幅光栅的频谱幅度。
18
博士论文全息成像的研究
3光学全息与计算全息方法
光学全息图采用物波与参考光波的干涉法在记录介质上记录光波和参考光波
叠加后形成的干涉条纹,这种条纹称为全息图。全息图记录的是物波的振幅和相
位,重现的是物光波,不是一对或几对立体图像,它包含了物体全部的深度信息。
利用参考光与全息平面之间的夹角不同,或者利用光源特性和光的几何成像原理,
可形成不同种类的全息图,目的是以不同效果重现物体的原样,但这些显示都是
静态的。计算全息则无须物体的客观存在,舍去了光全息术的物理干涉过程,直
接对物波的数学描述进行编码,生成全息条纹。计算全息的这一特点,使全息技
术与计算机技术、数学方法的结合成为可能。用计算机对光全息进行数值计算,
光信息必须被离散化成为数字信号,这样,光信息处理过程就转化为数字信号处
理问题。数字信号处理与光信息处理在处理手段上有着相关性。如快速傅立叶变
换(FFT)、信号的卷积与相关、小波变换等均在光信息处理中有着广泛的应用。
由计算全息生成的全息条纹可以转化为电信号,因此,全息图可以图像形式或以
电信号形式送入空间光调制器,使全息图的生成与图像的重现同时完成。在全息
显示中,全息图的生成在技术实现上大致分为以下几类:
(1)利用感光胶片记录全息图。
(2)利用新型材料Polymar记录全息图。
(3)利用激光刻蚀技术在金属膜上生成基元全息素全息图。
(4)将计算机生成的计算全息图以电信号形式送入LCD、液晶光阀或声光调制器
AOM等空间光调制器中,生成动态全息图。
以上方法中唯独方法(4)可生成动态全息图。因此,计算全息是实现动态全息显
示的基础。
本章首先介绍光全息的基本原理和方法。然后介绍了计算全息中的傅立叶
变换全息图的生成和编码方法,特别介绍了MIT研究员Lucent提出的改进型
的基于干涉的全息图计算方法,并用我们的软件工具,给出了空间点光源的全息图的计算与显示。用适合计算机快速处理的算法一模拟退火算法实现了二维图像的全息图和显示。由于三维图像可分割为一系列二维图像切片的叠加,
所以用傅立叶变换全息图和拟退火算法生成的全息图也可实现一个三维图像
的显示【nI。
3.1光全息方法
普通照相使用透镜成像原理,底片记录的是反映物体明暗的强度。全息图记录的是物光波和参考光波的干涉图样,它不仅存储了反映物体明暗的强度,还记录了物体的相位信息。全息图能重现物体的物光波,这种重现的物光波与物体发出的光波完全相同,因而能在物体已不存在的情况下,重现物体的三维图像。全息显示包括两个过程:记录和重现。
全息术中全息图记录的一般光路如图3-1所示Il”。自激光器输出的光束经分光器BS分为两束,一束经反光镜Ml反射和透镜Ll扩束后投射到记录介质H上作为参考光R。另一束经M2反射和L2扩束后照射到物体上,再经物体表面的漫反射作为物光波也投射在记录介质上,形成物光0。参考光和物光相干,将记录介质置于该干涉场中,于是就将物光波的全部信息(包括振幅和相位)以干涉条纹的形式记录下来。这就是波阵面记录过程。
图3-1全息图的记录
假设在全息图平面上物光和参考光的复振幅分别为
O(x,力;Oo阮力exp【,%0,州(3-1)
R(x,y)=Ro(x,y)exp[j?pR(x,y)】(3-2)
则物光波和参考光波在记录介质平面上叠加后的光强分布为
l(x,_y)=(o+R)(0}+R幸)=OO?+RR++0R十+o丰R
=(q2+霹)+DORoexpff(缈。一%)】+00R0exp[_0(%一‰)】
=喏+霹+2DORcos(妒。一‰)
3.3
式中第一、二项是光的自身干涉,为背景强度:第三项包含了物波信息。大小是
浅谈三维显示技术 摘要:目前许多研究者已经把三维显示系统作为下一代最有潜力的显示系统,并已经提出了许多三维显示技术,三维立体显示技术在未来几年必将掀起了一场3D 视觉革命。当前研究中的三维立体显示器件可以分成三类:戴眼镜式、多视点 裸眼式、真三维显示。当前市场上可以看到的三维显示器件主要是戴眼镜式和 多视点裸眼式,上述两种显示技术的主要问题是长时间观看会产生视觉疲劳。 真三维显示可以消除视觉疲劳,特别是近几年,全息立体显示技术发展迅速, 包括硅基液晶、光折变材料、表面等离子体等技术实现新型的全息立体显示方 式。三维显示技术的已成为当前的研究得热点,其中可以真实得再现出与真实 物体一样的深度和视差信息的全息显示技术,被认为是最理想的三维显示。可 以预见在未来的5至10年以后,具有高临场感、浸入式的三维立体显示技术将 无处不在。本文首先介绍了三维显示技术的背景和发展概况,接着简要介绍了 各种三维显示技术的原理及特点。 我们生活的世界是立体的,我们的眼睛在现实世界中获取的视觉信息,有很多都具有立体的三维信息。当然我们在现实生活中所接触到的大量图像信息中也有很多都是平面视觉信息,例如在报纸、杂志、电视机上看到的图片或者视频图像,这些信息均是对三维实物或场景的二维投影表达,从而失去了诸如:立体视差,移动视差等的心理暗示,没有真正的立体感。今天我们周围出现了越来越多用计算机模拟出来的三维景物。它们主要应用于各种各样三维显示的软硬技术中。这些技术无一例外都必须符合人眼立体感知的机理,提供足够多的三维感知因素使人们能有一种强烈的立体感。现有的一些三维技术,虽然能实现一定的三维显示功能,但长时间观看会有头晕、疲惫的感觉,主要原因在于技术设计上。没有很好地考虑人眼立体感知的工作机理。目前国内外已有不少这方面的研究,但大多分布在认知心理学、计算机科学等几个领域内的零散文献中。真实地再现世界始终是成像技术的重要发展方向。近几年来,由于计算机性能和处理能力的大大提高,计算机图形图像技术也得到了快速的发展,进而出现了各种各样的三维图像,并且在三维显示方法和系统实现方面也做了不少研究。 按基本工作原理是否为双目视差将三维立体显示分为两大类。基于双目视差原理的三维立体显示主要有眼镜立体显示和光栅式自由立体显示,这类三维立体显示的技术相对成熟并有相应产品;非基于双目视差原理的三维立体显示主要有全息立体显示、集成成像立体显示和体显示等,这类三维立体显示的技术较不成熟,大多没有相应产品。接下来对这些三维立体显示的器件结构、工作原理以及各自的特性进行阐述。 首先,必须了解什么是视差。视差就是从有一定距离的两个点上观察同一个目标所产生的方向差异。从目标看两个点之间的夹角,叫做这两个点的视差,两点之间的距离称作基线。只要知道视差角度和基线长度,就可以计算出目标和观测者之间的距离。 基于戴眼镜的三维立体显示技术的原理如下:此种三维立体显示是在观看者双眼前各放置一个显示屏, 观看者的左右眼只能分别观看到显示在对应屏 上的左右视差图,从而提供给观看者一种沉浸于虚拟世界的沉浸感。这种立体显示存在单用户性、显示屏分辨率低、及易给眼睛带来不适感等固有缺点。
全息成像互动系统 产品编号:HTCK--QXLY系列 产品名称:全息互动投影系统 产品规格:非标准尺寸,可以根据需要定制 核心设备:投影系统全息成像互动识别播放设备 应用方向:适用于商店、橱窗展示、机场、银行和其它人流密集地段的销售点产品宣传展示;适用于娱乐场合、酒吧、KTV房、作以增强现场气氛使用;适用于舞台,酒店大堂等 全息大屏幕采用高强度PET材料,产品不变形、不变色、防水、防静电,装贴简便,使用 寿命长,是投影配套安装的最佳选择。主要应用于企业大厅,会议室,视听室,展示厅,橱 窗,各类影音演示空间等。商场,KTV,车站,银行,婚纱影楼,地铁,网吧,家庭多媒体影 院,各类娱乐场所等。
全息屏幕是采用了全息技术的新一代创新型背投屏幕,能提供空中动态显示,适用于商店橱窗展示,机场银行和其他人流密集地段和销售点产品宣传展示,浅蓝色外观更能显示时尚动态,透明的显示效果允许观看者可以观看屏幕上图象的同时还可以看穿屏幕,这一点对于商店是非常有价值的,因为屏幕成为商店内部整体装饰的一部分。 技术参数: 可见光透射率 VLT% 69 可见光反射率 VRT% 20 太阳能阻隔率 TSER% 28 紫外线阻隔率 UVR% 98 太阳热减少率 .18 遮阳系数 SC .82 U—值 1.09 太阳能吸收率 .15 光能效率 .84 炫目光减少率 0.23背投: 适用于空间充足,画质细致立体感强。 正投: 运用于一般空间,方便操作及展示。
优点和应用: 单片穿透式屏幕,内部具有精密的光学结构,可有效抵抗周围的亮光具备高透光性、高亮度、高对比度的特点具有同时呈现实景与影像的功能无论室内、室外都可以提供绝佳的商场橱窗广告效果屏幕尺寸可达到150" 显示视频、DVD、TV、计算机投影机的最佳投影视角介于22-36度,可以避免投影机对展示品的遮拦。 应用场合: 适用于商店、橱窗展示、机场、银行和其它人流密集地段的销售点产品宣传展示; 适用于娱乐场合、酒吧、KTV房、DISCO,餐厅作以增强现场气氛使用; 适用于舞台,酒店大堂等。
全息影像技术 全息摄影就是在摄影的同时将上述两类信息同时记录来实现的。采用激光 作为照明光源,并将光源发出的光分为两束,一束直接射向感光片,另一 束经被摄物的反射后再射向感光片。两束光在感光片上叠加产生干涉,感 光底片上各点的感光程度不仅随强度也随两束光的位相关系而不同。所以 全息摄影不仅记录了物体上的反光强度,也记录了位相信息。与普通的摄 影技术相比,全息摄影技术记录了更多的信息,因此容量比普通照片信息 量大得多(百倍甚至千倍以上)。 全息影像的显示,则是通过光源照射在全息图上,这束光源的频率和传输 方向与参考光束完全一样,就可以再现物体的立体图像。观众从不同角度看,就可以看到物体的多个侧面,只不过看得见摸不到,因为记录的只是 影像。 目前最常用的光源是投影机,因为一来光源亮度相对稳定,二来,投影机 还具有放大影像的作用,作为全息展示非常实用。 技术原理 其第一步是利用干涉原理记录物体光波信息,此即拍摄过程:被摄物体在 激光辐照下形成漫射式的物光束;另一部分激光作为参考光束射到全息底 片上,和物光束叠加产生干涉,把物体光波上各点的位相和振幅转换成在 空间上变化的强度,从而利用干涉条纹间的反差和间隔将物体光波的全部 信息记录下来。记录着干涉条纹的底片经过显影、定影等处理程序后,便 成为一张全息图,或称全息照片;其第二步是利用衍射原理再现物体光波 信息,这是成象过程:全息图犹如一个复杂的光栅,在相干激光照射下, 一张线性记录的正弦型全息图的衍射光波一般可给出两个象,即原始象(又称初始象)和共轭象。再现的图像立体感强,具有真实的视觉效应。全息 图的每一部分都记录了物体上各点的光信息,故原则上它的每一部分都能 再现原物的整个图像,通过多次曝光还可以在同一张底片上记录多个不同 的图像,而且能互不干扰地分别显示出来。 全息原理是“一个系统原则上可以由它的边界上的一些自由度完全描述”,是基于黑洞的量子性质提出的一个新的基本原理。其实这个基本原理是联 系量子元和量子位结合的量子论的。其数学证明是,时空有多少维,就有 多少量子元;有多少量子元,就有多少量子位。它们一起组成类似矩阵的 时空有限集,即它们的排列组合集。全息不全,是说选排列数,选空集与 选全排列,有对偶性。即一定维数时空的全息性完全等价于少一个量子位 的排列数全息性;这类似“量子避错编码原理”,从根本上解决了量子计 算中的编码错误造成的系统计算误差问题。而时空的量子计算,类似生物
高清全景监控系统 广东百泰科技有限公司高清全景监控系统,是一套基于全景图像采集获取、拼接生成及浏览交互等技术的“点-面智能联动摄像机系统”,结合海量视频数据智能分析技术,可实现高清全景视频图像信息处理及交互应用。系统采用了高清全景监控系统、超高分辨率图像实时处理、ISP智能图像算法设计、海量图像分布式存储等多种前沿技术,通过一台180°高清全景摄像机与一台1080P全高清高速球有机嵌合,匹配专用软件,组成一套点面联动的智能化高清全景监控系统系统。通过单台摄像机就能对180°或360°度范围进行成像,并实现对成像区域内所有目标进行从点到面的同步高清监控,达到无缝监控、点面兼顾的效果。 本产品及技术可应用于各种需要了解城市地理信息,以及不同细节层次的准实时动态真实影像情况的可视化城市管理应用场合,能够基于GPS信息将其与GIS地理信息系统相结合,可提供给安防、城管、交通、消防、城市规划等各类具有城市地理信息及可视化城市管理需求的行业人员使用。 一、技术特色 全景:单台摄像机就能对180°或360°度视角范围进行成像。 高清:1080P全高清视频传输和录像。 超微光感知技术:采用双阶 3D 去噪算法、自动增益控制、自动背光补偿等技术,超低照度、超低噪声、全彩色,宽动态全景摄像,在光线暗淡的情况下依然能呈现彩色画面。 一键式点面联动:针对目前监控摄像机“看得清却看不全”“看得全却看不清”的矛盾,将高清高速球的“点”与全景摄像机的“面”搭配组合,实现由“面”及“点”的一键式操控,点击全景画面的任何一个位置,系统可立即调度高速球转到预定监视点,配准精度高达0.05°,响应时间小于0.1秒,使监控全局与局部细节一览无遗。 支持多分辨率采集和多码流传输。 IP66高防护等级,全天候室内外应用。 二、实景视频演示 低照度效果演示
《医学影像成像原理》名词解释 第一章 1.X 线摄影(radiography):是X 线通过人体不同组织、器官结构的衰减 作用,产生人体医疗情报信息传递给屏-片系统,再通过显定影处理,最终以X 线平片影像方式表现出来的技术。 2.X 线计算机体层成像(computed tomography,CT):经过准直器的X 线束穿透人体被检测层面;经人体薄层内组织、器官衰减后射出的带有人体信息的X 线束到达检测器,检测器将含有被检体层面信息X 线转变为相应的电信号;通过对电信号放大,A/D 转换器变为数字信号,送给计算机系统处理;计算机按 照设计好的方法进行图像重建和处理,得到人体被检测层面上组织、器官衰减系数(|)分布,并以灰度方式显示人体这一层面上组织、器官的图像。 3.磁共振成像(magnetic resonance imaging,MRI):通过对静磁场(B0)中的人体施加某种特定频率的射频脉冲电磁波,使人体组织中的氢质子(1H)受到激励而发生磁共振现象,当RF 脉冲中止后,1H 在弛豫过程中发射出射频信号 (MR 信号),被接收线圈接收,利用梯度磁场进行空间定位,最后进行图像重建而成像的。 4.计算机X 线摄影(computed radiography,CR):是使用可记录并由激光读出X 线影像信息的成像板(IP)作为载体,经X 线曝光及信息读出处理,形成数字式平片影像。 5.数字X 线摄影(digital radiography,DR):指在具有图像处理功能的计算机控制下,采用一维或二维的X 线探测器直接把X 线影像信息转化为数字信号的技术。 6.影像板(imaging plate,IP):是CR 系统中作为采集(记录)影像信息 的接收器(代替传统X 线胶片),可以重复使用,但没有显示影像的功能。7.平板探测器(flat panel detector,FPD):数字X 线摄影中用来代替屏- 片系统作为X 线信息接收器(探测器)。 8.数字减影血管造影(digital subtraction angiography,DSA):是计算机与常规X 线血管造影相结合的一种检查方法,能减去骨骼、肌肉等背景影像,突出显示血管图像的技术。 9.计算机辅助诊断(computer aided diagnosis,CAD):借助人工智能等技术对医学影像作图像分割、特征提取和定量分析等增加诊断信息,用以辅助医生对各种医学影像进行诊断的技术。 第二章 1.X 线强度(X-ray intensity):指在垂直于X 线传播方向单位面积上、单 位时间内通过光子数量(N)与能量(hν)(hv)乘积的总和。常用X 线强度表 示X 线的量与质。 2.光学密度(density,D):又称黑化度。指X 线胶片经过曝光后,通过 显影等处理在照片上形成的黑化程度。
立体显示技术介绍 一、.什么是立体显示? 立体显示或者称为3D显示,是指采用光学等多种技术手段来模拟实现人眼的立体视觉特性,将空间物体以3D信息再现出来,呈现出具有纵深感的立体图像的一种显示方式。相比于2D显示,3D显示提供给观看者更加强有力的沉浸感和震撼力。 人们之所以能够轻易地判断出物体在空间中的位置及不同物体间的相对位置,是因为人眼具有立体视觉。人们用以感知空间的主要生理机能有焦点调节、两眼集合、双目视差及单眼移动视差等。其中,双目视差担负着立体空间知觉的核心任务。焦点调节是为了把所注视的物体清晰地成像到视网膜上的眼球动作;两眼集合是当人在注视某个物体时左右眼视线往注视点上交汇而产生的眼球动作;双目视差是指由于人的左右眼从不同角度观看物体,从而成像于左右眼视网膜上的图像略有差异;单眼移动视差是指当观看者或被观看物体发生移动时人眼将看到物体的不同侧面。3D显示就是以人眼的立体视觉特性为基础的。 二、立体显示的实现方法 立体显示的实现方法可分为两大类,为助视3D显示和裸眼3D显示。 ?助视3D显示是靠眼睛佩戴助视设备来实现,如大家熟悉的偏光眼镜,这方面技术已成熟,但是也存在一定的缺陷,如亮度低,佩戴舒适度差等。 ?裸眼3D显示是通过光栅、集体成像、体3D和全息技术来实现3D立体成像,人眼无需佩戴任何设备,应用前景广泛,是目前显示研究的重点课题。 1.什么是光栅3D显示? 光栅3D显示器由光栅和2D显示器精密耦合而成。其中,光栅作为分光元件,对光线传播的路径进行一定方式的控制,使观看者的左右眼观看到不同的视差图像。可应用于手机、笔记本电脑显示和电视。如光栅3D显示手机就是采用双摄像头采集图像形成3D效果来实
360度全息投影系统方案
目录 一.概述.................................................................................... 错误!未定义书签。二.特点.................................................................................... 错误!未定义书签。三.三维全息影像的优越性.................................................................... 错误!未定义书签。四.环境要求................................................................................ 错误!未定义书签。五.原理.................................................................................... 错误!未定义书签。六.拓扑图.................................................................................. 错误!未定义书签。七.应用领域................................................................................ 错误!未定义书签。八.软硬件配置方案(以四个锥面为例)........................................................ 错误!未定义书签。
全息投影定义、原理及分类介绍 在科技快速发展的今天,人们对视觉要求越来越高,由此能实现裸眼立体3D 显示的全息投影技术的应用也是越来越多,在给人们带来新鲜有趣的视觉体验的同时,也为众多商家提供新的宣传营销方式,打开市场新大门。 全息投影技术在展览展示方式,采用全息投影技术的全息成像柜可以使立体影像不借助任何屏幕或介质而直接悬浮在设备外的自由空间,任意角度看都是三维影像展现。产品种类多样分有全息展示柜、180度全息展示柜、270度全息展示柜、360度全息展示柜、全息金字塔、大中小型全息金字塔定制、全息投影设备、3D投影成像设备、全息玻璃柜等,可根据用户使用需求使用场地进行定制。未来全息投影技术市场发展潜力将是无可估量的。 一、什么是全息投影全息投影技术是近些年来流行的一种高科技技术,它是采用一种国外进口的全息膜配合投影再加以影像内容来展示产品的一种推广手段。它提供了神奇的全息影像,可以在玻璃上或亚克力材料上成像。这种全新的互动展示技术将装饰性和实用性融为一体,在没有图像时完全透明,给使用者以全新的互动感受,成为当今一种最时尚的产品展示和市场推广手段。全息投影设备包括:全息投影仪,全息投影幕,全息投影膜,全息投影内容制作等。航天科工数字展示事业部提供3D全息投影成像系统项目策划、3D全息投影成像展示内容制作、 二、全息技术的原理全息投影技术是利用干涉和衍射原理记录并再现物体真实的三维图像的记录和再现的技术。 其第一步是利用干涉原理记录物体光波信息,此即拍摄过程:被摄物体在激光辐照下形成漫射式的物光束;另一部分激光作为参考光束射到全息底片上,和物光束叠加产生干涉,把物体光波上各点的位相和振幅转换成在空间上变化的强度,从而利用干涉条纹间的反差和间隔将物体光波的全部信息记录下来。记录着干涉条纹的底片经过显影、定影等处理程序后,便成为一张全息图,或称全息照片;其第二步是利用衍射原理再现物体光波信息,这是成象过程:全息图犹如一个复杂的光栅,在相干激光照射下,一张线性记录的正弦型全息图的衍射光波一般可给出两个象,即原始象(又称初始象)和共轭象。再现的图像立
3D立体成像技术简介 3D立体成像技术其实并不是一个新鲜事物。如果从时间上看,3D立体成像 技术早在上个世纪中叶就已经出现,比起现在主流的的液晶、等离子这些平板 显示技术,历史更加悠久。 那么现在的3D电视,到底使用了哪些方式来实现所谓的“全高清无闪烁”的立体影像呢? 色差式3D 历史悠久缺点最多 首先我们看看最早出现的也是最容易实现的一种3D立体成像技术:色差式 3D成像技术。 从技术层面上看色差式3D立体成像是比较简单的一种方法,这种3D成像 只需要通过一副简单的红蓝(或者红绿)眼镜就可实现,硬件成本不过几元钱。显示设备方面也无需额外的升级,现有的任何显示设备都可以直接显示。 色差式3D立体成像技术的原理是将两张不同视角上拍摄的影像分别以两种不同的颜色印制在同一副画面中,如果不戴眼镜,我们只能看到色彩重合的模 糊图像。但是戴上眼镜后,左右眼不同颜色的镜片分别过滤了对应的色彩,只 有红色的影像通过红色镜片蓝色通过蓝色镜片,最终两只眼睛看到的不同影像 在人脑中重叠产生了立体效果。 色差式3D立体成像原理简单,能达到的3D景深效果也还算不错。不过由 于采用的色度分离方式会给观看者带来比较严重的视觉障碍,舒适感始终不能 让人满意,同时画面的色彩还原效果也一直在较低的水准徘徊,这就导致了它 很难成为3D立体显示技术中的主流。 偏光式3D 影院主流家庭不易实现 在3D电视大量出现之前,3D影院其实已经进入我们的生活很长一段时间。而在3D影院之中最为常见的,就是偏光式3D技术。 偏光式3D技术主要利用偏振光分离技术实现3D立体成像。观看者通过佩 戴偏振眼镜,左右眼镜片就分别过滤掉不同偏振方向的光线,从而实现了左右 眼画面的分离。 影院方面在具体实施的时候主要有两种方式:双机3D和单机3D。双机3D 多用在IMAX 3D影院中,通过使用两台投影机,分别透射偏振方向不一样的左 右眼画面。单机3D相对简单,主要通过但抬头迎和快速切换的偏振器来分别高速切换左右眼画面,最终再通过偏振眼镜进行左右眼画面的分离。
双目视觉成像原理 1.引言 双目立体视觉(Binocular Stereo Vision)是机器视觉的一种重要形式,它是基于视差原理并利用成像设备从不同的位置获取被测物体的两幅图像,通过计算图像对应点间的位置偏差,来获取物体三维几何信息的方法。融合两只眼睛获得的图像并观察它们之间的差别,使我们可以获得明显的深度感,建立特征间的对应关系,将同一空间物理点在不同图像中的映像点对应起来,这个差别,我们称作视差(Disparity)图。 双目立体视觉测量方法具有效率高、精度合适、系统结构简单、成本低等优点,非常适合于制造现场的在线、非接触产品检测和质量控制。对运动物体(包括动物和人体形体)测量中,由于图像获取是在瞬间完成的,因此立体视觉方法是一种更有效的测量方法。双目立体视觉系统是计算机视觉的关键技术之一,获取空间三维场景的距离信息也是计算机视觉研究中最基础的内容。 2.双目立体视觉系统 立体视觉系统由左右两部摄像机组成。如图一所示,图中分别以下标L和r标注左、 右摄像机的相应参数。世界空间中一点A(X,Y,Z)在左右摄像机的成像面C L 和C R 上的像点 分别为al(ul,vl)和ar(ur,vr)。这两个像点是世界空间中同一个对象点A的像,称为“共轭点”。知道了这两个共轭像点,分别作它们与各自相机的光心Ol和Or的连线,即投影线alOl和arOr,它们的交点即为世界空间中的对象点A(X,Y,Z)。这就是立体视觉的基本原理。 图1:立体视觉系统 3.双目立体视觉相关基本理论说明
3.1 双目立体视觉原理 双目立体视觉三维测量是基于视差原理,图2所示为简单的平视双目立体成像原 理图,两摄像机的投影中心的连线的距离,即基线距为b 。摄像机坐标系的原点在摄像机镜头的光心处,坐标系如图2所示。事实上摄像机的成像平面在镜头的光心后,图2中将左右成像平面绘制在镜头的光心前f 处,这个虚拟的图像平面坐标系O1uv 的u 轴和v 轴与和摄像机坐标系的x 轴和y 轴方向一致,这样可以简化计算过程。左右图像坐标系的原点在摄像机光轴与平面的交点O1和O2。空间中某点P 在左图像和右图像中相应的坐标分别为P1(u1,v1)和P2(u2,v2)。假定两摄像机的图像在同一个平面上,则点P 图像坐标的Y 坐标相同,即v1=v2。由三角几何关系得到: c c 1z x f u = c c 2z )b -x (f u = v 1 c c 21z y f v v == 上式中(x c ,y c ,z c )为点P 在左摄像机坐标系中的坐标,b 为基线距,f 为两个摄 像机的焦距,(u1,v1)和(u2,v2)分别为点P 在左图像和右图像中的坐标。 视差定义为某一点在两幅图像中相应点的位置差: 图2:双目立体成像原理图 由此可计算出空间中某点P 在左摄像机坐标系中的坐标为: 因此,只要能够找到空间中某点在左右两个摄像机像面上的相应点,并且通过摄像机标定获得摄像机的内外参数,就可以确定这个点的三维坐标。 双目立体视觉的系统结构以及精度分析 由上述双目视觉系统的基本原理可知,为了获得三维空间中某点的三维坐标,需要在
2016年第二批技术攻关计划项目指南 重20160148:高性能通用DSP芯片关键技术研发 重20160243:高性能低功耗安全SOC芯片研发 重20160282:小基站可编程宽带射频收发芯片关键技术研发 重20160308:基于3片式硅基液晶(LCOS)的4K投影系统研发 重20160309:可重构的物联网智能感知关键技术研发 重20160310:面向社区矫正定位跟踪的可穿戴装置研发 重20160311:基于国产安全芯片的移动支付终端研发 重20160312:新版纸币的鉴伪识别关键技术研发 重20160313:面向多信号源的一体化小型基站装置研发 重20160314:基于集成成像的真三维视屏显示系统研究 重20160315:智能轮胎压力监测系统研发 重20160316:用于植物生长的全光谱LED光源模组研发 重20160317:LED 芯片级封装(CSP)关键技术研究 重20160318:碳化硅功率器件关键技术研发 重20160319:大气颗粒物在线监测技术研发 重20160320:低温锡膏的研发 重20160321:高通量基因测序核心工具酶的开发 重20160322:新一代干燥型基因诊断试剂的关键技术研发 重20160323:亲水树脂填料分离纯化新型血浆蛋白的关键技术研发 重20160324:微生态活菌制品工艺及其生产设备的研究与开发 重20160325:肿瘤靶向性T-CTL免疫细胞治疗 重20160326:肿瘤光学治疗的纳米光敏剂研发 重20160327:幽门螺杆菌抗体谱与胃癌相关性的研究及试剂盒的开发 重20160328:基于物联网技术的糖尿病院外监护平台关键技术研发 重20160329:乙酰基亚硝基脲(ENU)化学诱变创制猪种质资源关键技术研发 重20160330:再生骨料混凝土用缓释高效减水剂关键技术研究 重20160331:挥发性有机物净化催化剂研发 重20160332:边坡稳定性预测预报及垮塌控制技术研究 重20160333:常温高效市政污泥干化关键技术研发 重20160334:多功能抗病原微生物新型空气净化系统关键技术研发 重20160335:智能电动平衡车专用控制电路研发 重20160336:用于高频大功率电子系统的氮化镓高迁移率电子器件(GaN HEMT)研发重20160337:超低照度图像传感芯片及无线低功耗被动红外安全相机研发 重20160338:适用iOS的高速存储电路研发 重20160339:电子纸显示驱动单芯片研发 重20160340:硅基高速光耦系列芯片关键技术研发 重20160341:超低功耗高压超结功率器件关键技术研发 重20160342:单层石墨烯在锂离子动力电池隔膜中应用研发 重20160343:医用三维石墨烯水凝胶制备关键技术研发
全息投影技术 全息投影技术是近年来兴起的一种高科技技术,它是一种利用干涉和衍射原理记录并再现物体真实的三维图像。它正以一种全新的事物改变着人们对那些传统舞台的声光电技术的审美态度。这种全息投影技术应时代而来,被广泛的应用于社会的各个方面。 如右图,这是英国一家高级酒店推出的利用全息投影技术指引入住者到达指定房间的,画面上鲜活的人物空间成像色彩鲜艳,对比度、清晰度都非常高,空间感、透视感很强。这种技术用科幻般的效果营造着虚拟与 全息技术是利用干涉和衍射原理记录并再现物体真实的三维图像的记录和再现的技术。 其第一步是利用干涉原理记录物体光波信息,此即拍摄过程:被摄物体在激光辐照下形成漫射式的物光束;另一部分激光作为参考光束射到全息底片上,和物光束叠加产生干涉,把物体光波上各点的位相和振幅转换成在空间上变化的强度,从而利用干涉条纹间的反差和间隔将物体光波的全部信息记录下来。记录着干涉条纹的底片经过显影、定影等处理程序后,便成为一张全息图,或称全息照片; 其第二步是利用衍射原理再现物体光波信息,这是成象过程:全息图犹如一个复杂的光栅,在相干激光照射下,一张线性记录的正弦型全息图的衍射光波一般可给出两个象,即原始象(又称初始象)和共轭象。再现的图像立体感强,具有真实的视觉效应。全息图的每一部分都记录了物体上各点的光信息,故原则上它的每一部分都能再现原物的整个图像,通过多次曝光还可以在同一张底片上记录多个不同的图像,而且能互不干扰地分别显示出来。国内比较牛的有清华,中国科技,中国光电研究院,浙江大学,国防科技大学,上海交大,江苏大学等。除光学全息外,还发展了红外、微波和超声全息技术,这些全息技术在军事侦察和监视上有重要意义。
高清网络监控摄像机监控系统设计方案 技 术 设 计 方 案 介 绍
第一章公司简介 质量方针:以人为本、质量第一 公司成立至今,坚持以领先的技术、优良的商品、完善的售后服务、微利提取的原则服务于社会。我公司为您提供的产品,关键设备采用高质量进口合格产品,一般设备及材料采用国内大型企业或合资企业的产品,各种产品企业都通过 ISO9001国际质量体系认证。有一支精良的安防建设队伍,由专业技术人员为您设计,现场有专业技术人员带领施工,有良好职业道德施工人员。我公司用户拥有优质的设计施工质量和优质的售后服务保障。 客户哲学:全新理念、一流的技术、丰富的经验,开创数字新生活 专注——维护世界第一中小企业管理品牌、跟踪业界一流信息技术、传播经营管理理念是吉伟永恒不变的追求,吉伟坚持“全新的理念、一流的技术、丰富的经验、优质的服务”,专注于核心竞争力的建设是吉伟取得今天成功的根本,也必将是吉伟再创辉煌的基础! 分享——“道不同,不相谋”,吉伟在公司团队之间、渠道伙伴、客户之间均倡导平等、共赢、和谐、协同的合作文化,在迎接外部挑战的过程中,我们共同期待发展和超越,共同分享激情与快乐!“合作的智慧”是决定吉伟青春永葆的最终动力! 我公司全体员工愿与社会各界携手共创未来!我们秉承真诚合作精神向广大客户提供相关的系统解决方案,设备销售及技术支持,价格合理,欢迎来人来电咨询、洽谈业务!
第二章什么是高清网络监控摄像机 随着社会不断进步,经济快速发展和技术突飞猛进,公共秩序安全、生产安全、财产安全等越来越受到人们的重视,从而使以视频信息为特征的视频监控更为广泛地被应用在各行业领域,从传统的安防监控向管理和生产经营监控发展,从室内到无人值守特定场合应用的监控。 传统的监控模式已不能满足政府“平安城市”、金融系统、高等教育、监管、监狱、文博等行业对安防的需求,而拥有网络化、智能化、数字化、远程化特点的网络视频监控系统则成为新的应用趋势,并形成一个高效、安全、先进的网络视频监控体系。 网络视频监控系统中,H.264编码压缩算法得以成功推广,随着用户的逐步认可、价格的降低及功能的完善,必然迎来高清网络摄像机主导未来视频监控领域的时代。
全息投影系统建设方案 XXXX科技股份 2017年9月14日
目录 一、概述 (3) 二、特点 (3) 三、全息投影的优越性 (4) 四、环境要求 (4) 五、原理 (5) 六、拓扑图 (5) 七、应用领域 (6) 八、设计效果图 (7) 九、硬件报价 (9)
一、概述 全息投影系统简称全息系统,也称360度全息成像、三维全息影像、全息三维成像。全息系统是由透明材料(玻璃或者透明有机板)制成的四面锥体,通过四个视频源在锥体上边或者下边投射到锥体中的特殊棱镜上,根据光学原理,汇集到一起后形成具有真实维度空间的立体影像。 全息投影系统主要是由柜体,分光镜面,成像锥体,图像投影和图像处理器五部分组成,对产品进行实拍和构建三维模型,再用电脑数字处理制作成360度旋转动画,通过图像投影设备将动画投射到分光镜面上,再折射到四个面的成像锥体上边,形式360度立体成像,参观者可以360度参观产品,不需要佩戴任何偏光眼镜,在完全没有束缚下就可以尽情观看3D幻影立体显示特效,给人以视觉上的强烈冲击,是一种科技含量高,新颖性强,广受大中型展馆欢迎的多媒体展项。 二、特点 1. 柜体时尚美观,有科技感。顶端四面透明,真正的空间成像色彩鲜艳,对比度,清晰度高;具有空间感,透视感。 2. 参观者可以360度参观产品,不需要佩戴任何偏光眼镜,可以尽情观看3D幻影立体显示特效。 3. 可以结合实际物体,形式空中幻象,实现影像与实物结合,
增强产品广告宣传效果。 4. 占用空间比较小,可以根据要求定制。 5. 灵活性比较强,通常是4个面,也可以做3个面或者2个面。 三、全息投影的优越性 1. 尺寸灵活——全息系统硬件设备分为成像区与工作区两部分,成像尺寸由1.2M至12M,可根据不同的应用需求进行尺寸选择。 2. 安装便捷——全息系统能根据现有的建筑或安装位置空间来修改硬件的体系和结构,有利于在各种建筑和城市空间里永久安装。 3. 容多样——全息系统可根据需求随时更换数字容。 四、环境要求 全息系统对环境亮度有一定要求,避免强光高亮度,亮度越暗效果越好。
三大独家全息投影显示技术解析 昨日,小编跟大家简单说了几个全息投影系统的微显示 模组几个大厂的方案。德州仪器的 DLP Pico 1080p 高清投 影、奇景光电的 Lcos 发射式投影系列、 3M 面向消费级家 庭娱乐公共设置的投影系统。那么今天,小编还是继续跟大 家分享关于全息投影显示技术相关内容。 要知道,在之前的投影机市场,投影光源主要以 led 主,自 06 年三菱推出首款 40 英寸激光电视样机以来, 14 年国际激光显示技术产业化前期创新发展与技术沉淀, 16 年的时候, 激光投影市场才逐渐被打开, 就去年的市场数 据显示,激光投影产品销量已经达到 11 万台,相比上一年 增长了 4 倍之多。激光显示作为第四代显示技术,在我国以 中科院光电研究院为首提前 20 多年布局研发抢占先机,逐 步引导了全球激光显示技术的发展。 在“中国制造 2025“战略 ,未来极有可能由中国品牌引领全球激光显示产业创 新。 目前,微投影技术正在向着光电集成芯片的方向发展,从而 衍生出各式各样的微投影集成显示芯片,其中最常见的就包 括: MEMS 光扫描微投影、 LCD (液晶微型投影技术)透射 微投影、 DLP (由德州仪器开发的数字光学处理技术)以及 LCoS (硅基液晶)反射式微投影 四种主要的显示技术。 光源为 经过
、微视(MicroVision )MEMS 扫描镜及Pico 激光束扫描系统微视(MicroVision )发明的单个微型MEMS 扫描镜组 从16 年底,美国微视公司就与意法半导体(ST )宣布合作开发、生产、销售及推广激光束扫描(LBS )技术,其中LBS 解决方案开发的内容就包括微型投影仪和平视显示器 HUD )。目前,在微电机系统(MEMS )技术已经在硅基片中构成了完整的微显示器,无须再制造附加的上层结构。 MicroVision MEMS 扫描镜结构与原理MEMS 扫描镜内部构造 MEMS 镜组件中有一个反射镜悬浮在常平架(Gimbal Frame )内,常平架上有一个微加工的通电线圈。MEMS 裸片周围安装有永磁体,用于提供磁场。在MEMS 镜组件工作时,只要给MEMS 线圈施加一个电流,就能在常平架上产生一个磁力扭矩,并沿旋转轴的两个方向产生分量。扭矩的两个分量分别负责常平架围绕挠曲悬架旋转和扫描镜谐振模式振
三种3D立体成像显示技术 3D显示(或称立体成像)技术有几百年的历史。从原理上大致可分为三大类:立体图像对技术(Stereo Pair)、体显示技术(Volumetric Displays)、全息技术(Holography)。 立体图像对是目前发展最成熟也是应用最广泛的3D显示技术,戴立体眼镜看3D电影和裸眼就能看到立体效果的显示屏都是基于这种技术实现的。它的基本原理是,先产生场景的两个视图或多个视图,然后用某种机制(如佩戴眼镜)将不同视图分别传送给左右眼,确保每只眼睛只看到对应的视图而看不到其他视图。如果观察者无需佩戴立体眼镜即可看到立体效果,则称为“裸眼立体显示”。 虽然立体图像对技术能够提供立体感,但它本质上只是空间中两张或多张平面图像,通过“欺骗”人眼视觉系统而立体成像。这类技术会使人眼产生矛盾的晶状体焦距调节和视线汇聚调节,长时间观看会产生视觉疲劳。而体显示技术与之不同,它物理上显示了三个维度,能在空间中产生真正的3D效果。成像物体就像在空间中真实存在,观察者能看到科幻电影中一般“悬浮”在半空中的3D透视图像。从数字图像处理技术来说,平面图像对应了二维数组,每个元素被称为像素;而三维图像对应三维数组,每个元素被称为体素。体显示技术正是在空间中表现了这个三维数组。 根据是否有机械结构,体显示可分为两种实现方式,扫描体显示(Swept Volume)和静态体显示(Static Volume)。扫描体显示技术利用高速旋转的平面反射光线,并通过视觉记忆而立体成像。一个成功的产品是Actuality系统公司的Perspecta 3D显示器。而静态体显示的典型产品是Felix3D公司的SolidFelix,它以含有稀土元素的晶体作为显示介质,使用两束相干激光照射晶体内部空间点发光。另一个静态体显示技术的产品是DepthCube 系统,它使用20块液晶屏层叠而成,任何时刻只有一块屏工作,其他都是透明的,而图像也只投射到工作的显示屏上。DepthCube在这20块屏上快速切换显示3D物体截面从而产生纵深感。 全息技术是利用光波的干涉和衍射原理记录并再现物体的真实感的一种成像技术。全息照片记录了物体拍摄时的干涉条纹,重现时用相干光源照射全息照片,根据光的衍射而立
纹影法又称施利伦(schlieren)方法,是一种经典的光学显示技术。其基本原理是利用光在被测流场中的折射率梯度正比于流场的气流密度原理,将流场中密度梯度的变化转变为记录平面上相对光强的变化,使可压缩流场中的激波、压缩波等密度变化剧烈的区域成为可观察、可分辨的图像,从而记录下来。把具有高时间分辨本领的告诉相机与纹影法结合起来,便成为高速纹影法。该方法在轰爆与冲击波物理实验中,用于显示流场、冲击波阵面及在透明介质中的传播、观察高压力下自由表面的微物质喷射、界面上的波系状况、界面不稳定性以及高压下火花放电等弱冲击波的发展等,是一种有着广泛用途的光学测试技术。 纹影系统按照光线通过被测流场区的形状,分为平行光纹影系统和锥形光纹影系统两大类,但二者成像原理相同。锥形光纹影系统的结构简单,其灵敏度比平行光纹影系统更高,但是这种纹影系统由于是同一条光线反复经过被测区,会导致被观察区的图像失真。而平行光纹影系统能够真实地反映被观察区密度的变化,在实验中得到了更为广泛的应用。平行光纹影系统分为透射式和反射式两种,透射式的光学成像质量好,但对视场要求比较大,要加工大口径的纹影透镜又比较困难,反射式的光学成像虽然带有轴外光线成像造成的彗差和像散两类象,但是只要在光路上采用“Z”形布置和在仪器使用时将光刀刀口面调整到系统的子午焦平面和径向焦平面上,就可以减少两类象差,从而得到满意的结果。透射式纹影系统、反射式纹影系统组成如下图: 图1:透射式纹影系统组成图
图2:反射式纹影系统组成图 纹影仪是实现纹影法的基本仪器,常被用于配合相机或高速相机观察透明介质因各种因素引起的分布、传播过程以及扰动强度等。如研究激光与物质作用、分层流、多项流、传热与传至、激波、超声波流、燃烧、火焰、爆炸、高压放电、等离子体、内弹道及某些化学反应等学科的流场密度变化科学研究。其常见样式如下: 使用纹影仪观察燃油喷雾在整个燃烧室内发展变化的应用举例:
集成成像方向性再现 纪超超1,邓欢1, 王琼华1,2 (1 四川大学电子信息学院,成都,610065) (2 四川大学视觉合成图形图像技术国家重点学科实验室,成都,610065)摘要:文中提出了一种聚焦模式下的集成成像方向性再现的方法。该方法通过像素提取实现极小的观看视角供单人观看3D图像,同时在一定的观看区域内可以控制重建3D图像的观看方向。通过理论分析和像素提取实验证明了该方法具有可行性。该方法有望实现在一台电视同时播放多套3D节目,其应用潜力巨大。 关键字:集成成像;方向性再现;像素提取 Integral Imaging Directional Reconstruction Chao-Chao Ji1, Huan Deng1, and Qiong-Hua Wang1,2, (1 School of Electronics and Information Engineering, Sichuan University, Chengdu 610065,China) (2 State Key Laboratory of Fundamental Science on Synthetic Vision, Sichuan University, Chengdu 610065, China) Abstract: In this paper we propose an integral imaging directional reconstruction method in focused mode. The proposed method can provide a very small viewing angle and three-dimensional (3D) images only for one person through pixel extraction. In addition, it can control the viewing direction of the reconstructed 3D images within a view zone. According to theoretical analysis and the experimental results, we demonstrate the feasibility of the proposed method.it is possible for a TV to show multiple 3D programs at the same time. Keywords: integral imaging; directional reconstruction; pixel extraction. 1 引言 在目前众多三维(3D)图像显示技术中,集成成像显示技术能够提供全真色彩与全视差的3D图像且不需任何辅助的设备,是最有希望较快实现3D电视的技术之一[1-3]。一个集成成像显示系统的观看特性通常可通过图像分辨率、观看视角、图像深度等参数表征。对于一个常规的集成成像系统,如果显示面板的分辨率固定,其三个参数之间有一个平
全息投影技术:虚拟成像背后的原理 全息投影技术(front-projected holographic display)也称虚拟成像技术,是利用干涉和衍射原理记录并再现物体真实的三维图像的技术。不仅可以产生立体的空中幻像,还可以使幻像与表演者产生互动,一起完成表演,产生令人震撼的演出效果。操作者可以通过自己的肢体去控制系统,并且实现与互联网玩家互动,分享图片、影音信息。 随着上世纪60年代激光被发现之后,全息投影技术也迎来了快速的发展。如今全息投影的实现主要依靠水雾投影、全息膜投影等几种方式,其中全息膜投影技术凭借较低的成本已经实现了大规模商业化,我们在舞台上看到的立体影像大都是通过这种方式实现的。
全息技术,被业界誉为显示领域的另一项革命性新技术。全息技术是利用干涉和衍射原理记录并再现物体真实的三维图像的记录和再现的技术。 成像原理 全息技术第一步是利用干涉原理记录物体光波信息,此即拍摄过程:被摄物体在激光辐照下形成漫射式的物光束;另一部分激光作为参考光束射到全息底片上,和物光束叠加产生干涉,把物体光波上各点的相位和振幅转换成在空间上变化的强度,从而利用干涉条纹间的反差和间
隔将物体光波的全部信息记录下来。记录着干涉条纹的底片经过显影、定影等处理程序后,便成为一张全息图,或称全息照片。 显像过程 显像过程,就是利用参考光对物光的完全重现,全息显成像过程光路图如下。 全息技术第二步是利用衍射原理再现物体光波信息,这是成象过程:全息图犹如一个复杂的光栅,在相干激光照射下,一张线性记录的正弦型全息图的衍射光波一般可给出两个象,即原始象(又称初始象)和共轭象。再现的图像立体感强,具有真实的视觉效应。全息图的每一部