四象限探测器在太阳能电池板自动跟踪系统中的应用
摘要:采用四象限探测器作为前端探测单元,介绍了利用光电技术、电子技术、自动控制技术以及精密的步进系统实现了太阳能板自动跟踪瞄准系统中的四象限探测器的应用设计。
Abstract:Adapt the four quadrant detector as the front detector .Introduced the steeping system based on optoelectronic technology, electronic technology, automatic control technology .Realized the designation of the automatic tracking system of solar panels.
目录
第一章应用背景 (3)
第二章名词解释 (3)
2.1 四象限探测器 (3)
2.2 步进电机 (5)
第三章系统的工作原理 (5)
3.1 系统工作过程 (5)
3.2 传感器工作原理 (6)
3.3 探测器放大器基本原理图 (8)
第四章系统的电路设计 (9)
第五章系统控制程序设计 (10)
第六章问题和缺陷 (11)
第七章结束语 (12)
一、四象限探测器在太阳能电池板自动跟踪系统中的应用背景:
太阳能热发电和太阳能光伏发电是目前利用太阳能发电的两种主要形式。光热是通过聚光加热介质, 推动燃气轮机做功发电。而光伏发电则通过太阳光照射光电池板将光能直接转化为电能。由于太阳能辐射到地球表面的能量密度比较低, 无论是对于太阳能光伏发电还是太阳能热发电, 能否经济高效利用太阳能的关键在于太阳聚光和跟踪水平的优劣。实验证明在相同条件下, 极轴式太阳能自动跟踪发电的发电量要比固定发电(用太阳能电池板固定朝南安装的方式对太阳能进行采集)提高40% 左右。而采用聚光技术对太阳跟踪又提出了更高的要求.目前主要的跟踪方式是根据地球自转以及GPS进行粗调节,利用光电传感器设计的系统进行精确调节跟踪,本文主要讲述四象限探测器在太阳能电池板自动跟踪系统中的应用。
二、名词解释
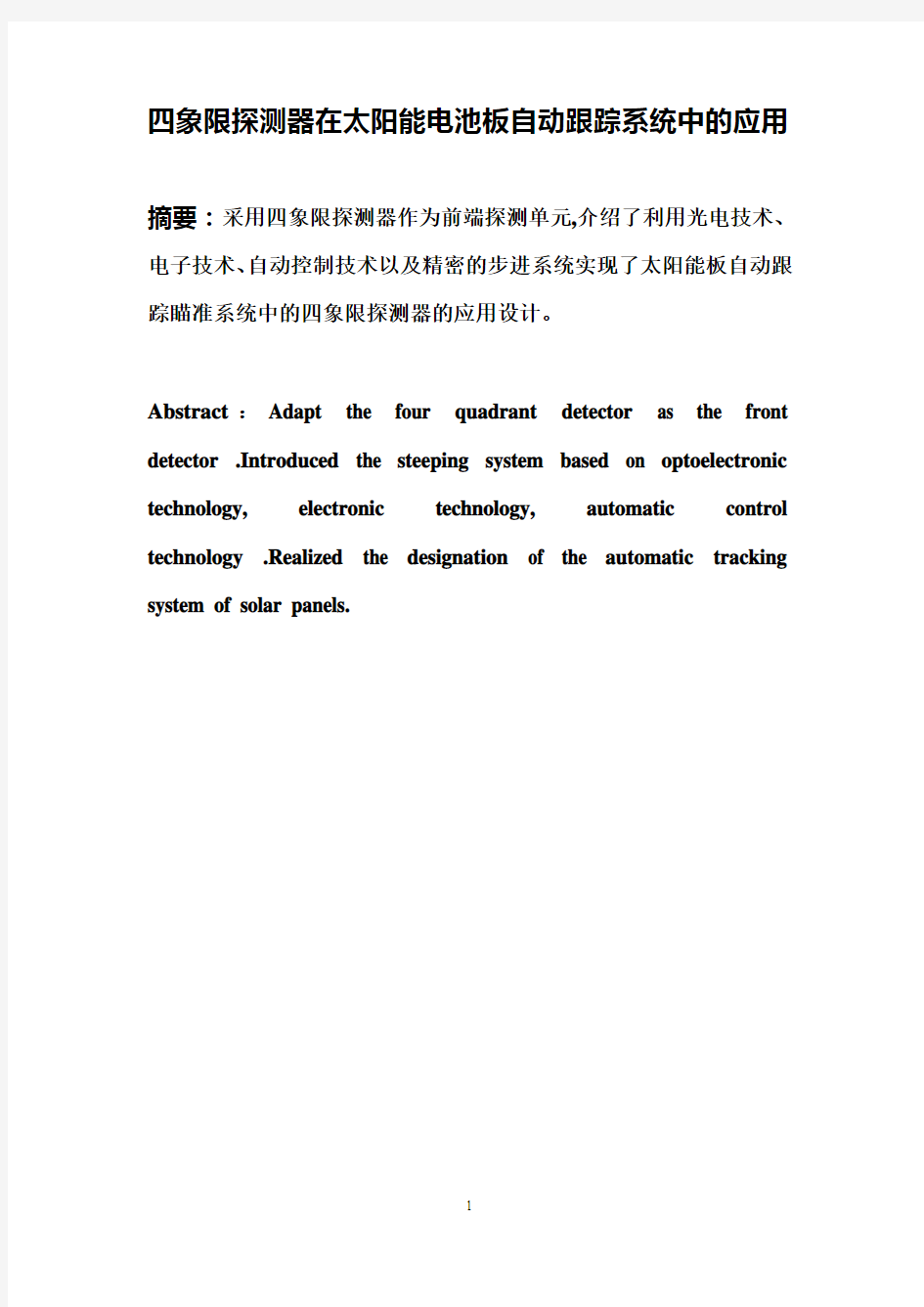
2.1、四象限探测器:是把4个性能完全相同的光伏电池板, 按照直角坐标要求排列而成的光伏探测器件, 它们之间有个十字形沟道相隔,如图I所示,其实物图如图II所示。
图I
光信号经过光学系统在探测器上成像。当光信号偏离探测器法向时, 4个象限上的成像面积不同, 探测器输出的电压信号幅度不同, 比较
4个象限的输出, 即可确定光信号的方向。
2.2、步进电机:步进电机是将电脉冲信号转变为角位移或线位移的开环控制元步进电机件。在非超载的情况下,电机的转速、停止的位置只取决于脉冲信号的频率和脉冲数,而不受负载变化的影响,当步进驱动器接收到一个脉冲信号,它就驱动步进电机按设定的方向转动一个固定的角度,称为“步距角”,它的旋转是以固定的角度一步一步运行的。可以通过控制脉冲个数来控制角位移量,从而达到准确定位的目的;同时可以通过控制脉冲频率来控制电机转动的速度和加速度,从而达到调速的目的。
三、系统的工作原理:
3.1系统工作过程
系统的工作原理如图1所示.太阳光透过光孔,由透镜汇聚到四象限探测器的感光表面,受光面的4个电极就产生电压信号,这些电信号依次经过前置放大电路、滤波电路以及A/D转换电路后,转换成数字量,并由控制器从A/D转换器的寄存器中读取4个通道的采样数据.如果入射光斑的位置在受光面的中心,则受光面的各个电极的输出信号相等,此时入射光线与固定平面垂直.如果入射光斑的位置不在受光面的中心,受光面的输出信号不相等,通过下列步骤调整旋转平面:
(1)通过数据运算可以确定入射光斑中心与受光面中心的相对偏移量,从而计算出入射光线与固定平面法线的夹角;
(2)计算出控制方位角转动的步进电机和控制俯仰角旋转的步进电机
的旋转角度,以使入射光线与固定平面法线之间的夹角为0°;
(3)计算出步进电机的旋转步数和旋转方向,通过接口电路输出控制指令,驱动步进电机动作.为了减小功耗,在步进电机停止转动期间,通过控制器关闭步进电机的电源
1—太阳能板;2—探测器模块;3—俯仰角支架;
4—方位角转轴;5—滚珠丝杆;6—步进电机A;
7—齿轮组;8—步进电机B
图1二维转台结构图
3.2传感器工作原理:
采用EOS S-010-QD硅四象限探测器来检测太阳光的入射光线与固定平面法线的夹角,该探测器是在一块芯片上封装了4个单独的感光面(共阴极),敏感面直径为10 mm,工作波长为0.3~1.1μm,可以提供4路模拟电压输出,因此系统中选择探测器的输出电压作为有效测量信号.安装时,遮光罩的顶部平面以及受光面均要与转台的固定平板面平行,如图2所示:
1—太阳能板平面;2—避光罩;3—四象限探测器;
4—入射光斑位置;5—透光孔及物镜;6—平面的法线;
7—入射光线
图2传感器工作原理图
此外:为了加强入射光的强度降低损耗,可以在遮光罩的前端加一个长焦距正透镜,使得入射的光汇聚到一个较小的光斑,既可以提高输出信号强度,又能降低噪声干扰,但是应当注意的是不可使光斑过小,否则会烧坏探测器。
四象限探测器是一种基于四象限分解法设计的位敏器件,目标光信号经光学系统后在四象限探测器上成像,当目标成像不在光轴上时,4个象限上输出的信号幅度不相同.根据各象限上能量分布的比例可计算出目标的亮度中心位置,以确定目标的空间位置,即检测目标具体方位可以归结为像斑相对于探测器中心的偏移量大小和方向的计算.文中使用四象限加减求解法来提取目标偏移量,基本公式如下:
图i
式中,Ex和EY分别为x、y轴上的偏移量;SA、SB、SC、SD分别为像斑在4个象限上的分布面积如图i所示.设光斑的中心坐标为(a,b),如图2所示,则入射光线在zox和zoy平面中的投影线与平板法线的夹角φx及φy分别为:
3.3四象限探测器放大的基本原理图如图ii所示:
图ii
A、B、C、D 四个光电二极管分别组成四象限探测器的某一个象限。每个象限输出的光电转换信号经各自的信号放大器放大后输入到下一级信号处理电路。
四、系统的电路设计:
系统硬件电路采用高性能集成电路芯片为核心来设计,如图4所示.系统采用实时工作方式.在工作过程中,四象限光电探测器的4路输出信号分别经过各通道的放大电路、滤波电路之后,由16位A/D转换电路对4路模拟信号同时进行采样,然后由控制单元处理器依次从A/D 转换器的寄存器中读取转换结果,根据程序逻辑和处理算法,对前端光斑的接收位置进行判断,以输出相应的控制信号,驱动执行机构的步进电机动作,对太阳能板的接收角度进行实时调整.在整个工作过程中,可以实现完全的自动化控制.但考虑到人员的可控性,系统设置了几个人工操作键,并可以进行自动/手动模式切换,满足某些情况下人工操作的需要.系统的手动模式切换端、方位角加减控制端、俯仰角加减
控制量和系统复位端均为开关量.在自动工作模式中,系统对4路输入信号实时采集,自动调整接收位置,以保证入射光垂直作用于太阳能板,整个工作过程自动实现,实时循环执行。
图3硬件电路结构图
五、系统控制程序的设计:
使用C语言编程.程序流程如图5所示:
首先进行初始化,置/CS=1,关闭AD7656,然后处理从四个通道采集的经过放大器放大的信号,先判断信号强度即判断光强,如果光强过小,表明天气不佳,无足够日照,则开启弱光强警报器发出警报,程序结束运行,否则光强足够大则计算光斑中心的偏移量,判断是否有偏移,若无偏移则不进行调节,弱有偏移则计算步进电机需要驱动的方向和步数,紧接着驱动相应的步进电机运转。
六、问题和缺陷
背景光的干扰:光斑中心位置的计算是通过各象限产生的电流强
度变化得到, 而各电流大小是与其受光面光强有关。而在检测中, 除了测量光外, 还有其它背景光在四象限探测器上造成响应, 这将会干扰测试系统,使测量精度降低, 甚至无法工作。因此在测量过程中应考虑到如何解决背景光干扰问,本文篇幅有限并未对此问题的解决提出有效的解决方法。
七、结束语
本文介绍的系统采用四象限探测器作为前端探测单元,介绍了利用光电技术、电子技术、自动控制技术以及精密的步进系统实现了太阳能板自动跟踪瞄准系统中的四象限探测器的应用设计.单一的四象限探测器跟踪系统只能完成精确的调节,要借助极轴跟踪系统等才能最大地发挥其作用,本文主要介绍了四象限探测器在整个跟踪系统中的应用,对于整个跟踪系统的其他部分并未做过多的介绍。
参考文献:
[1] Helwa N H,Bangat A B G,Elshenawy E T. Maxi-mum Collectable Solar Energy by Different SolarTracking systems[J].Solar Energy,1991,46(4):211-217
[2] Snyder G J,Ursell T S.Thermoelectric Efficiencyand Compatibility [J]. Physical Review Letters,2003,91(14):8301-8304 [3] Snyder G J.Application of the Compatibility Factorto the
Design of Segmented and Cascaded Thermo-electric Generators[J]. Appl Phys Lett,2004,84(13):2 436-2 438
[4 ]DiSalvo F J. Thermoelectric Cooling and PowerGeneration[J].Science,1999,285:703-706
[5] 吴红山. 太阳能的应用现状及发展前景[ J] . 科技信息(学术研究) , 08, 07: 72-74.
[6]童长飞.C8051F系列单片机开发与C语言编程(附光盘) [M].北京:北京航空航天大学出版社,2006.
太阳能电池组件封装工艺大全 一、太阳能电池组件封装简介 组件线又叫封装线,封装是太阳能电池板生产中的关键步骤,没有良好的封装工艺,多好的电池片也做不出好的组件板。良好的电池封装不仅可以使电池的寿命得到保证,而且还增强了电池的抗击强度。产品的高质量和高寿命是赢得客户满意的关键,所以太阳能电池板的封装工艺至关重要。 太阳能电池组件封装工艺流程图如下: 太阳能电池组件封装结构图 如何保证太阳能电池组件的高效和高寿命? 1、高转换效率、高质量的电池片
下图是电池的结构示意图: (1)金属电极主栅线;(2)金属上电极细栅线;(3)金属底电极;(4)减反射膜;(5)顶区层(扩散层);(6)体区层(基区层); 2、高质量的封装材料 高耐候性、低水蒸汽透过率、良好电绝缘性等性能优异的太阳能电池背板; 交联度高、耐黄变性能好、热稳定性好、粘接力强等性能优异的EVA胶膜; 高粘结强度、密封性好的封装剂(中性硅酮树脂胶); 高透光率、高强度的钢化玻璃等
3、严谨的工作态度 由于太阳电池组件属于高科技产品,生产过程中一些细节问题,一些不起眼问题如应戴手套而不戴、应均匀的涂刷试剂而潦草完事等都是影响产品质量的大敌,所以除了制定合理的制作工艺外,员工的认真和严谨是非常重要的。 二、太阳能电池组件组装工艺介绍 1、电池分选 由于电池片制作条件的随机性,生产出来的电池片性能不尽相同,所以为了有效的将性能一致或相近的电池片组合在一起,应根据其性能参数进行分类;电池测试即通过测试电池片的输出参数(电流和电压)的大小对其进行分类。以提高电池片的利用率,做出质量合格的太阳能电池组件。 2、单焊 是将汇流带焊接到电池正面(负极)的主栅线上,汇流带为镀锡的铜带,焊带的长度约为电池片边长的2倍。多出的焊带在背面焊接时与后面的电池片的背面电极相连(如下图)。 3、串焊 背面焊接是将N张片电池串接在一起形成一个组件串,电池的定位主要靠一个膜具板,操作者使用电烙铁和焊锡丝将单片焊接好的电池的正面电极(负极)焊接到“后面电池”的背面电极(正极)上,这样依次将N张电池片串接在一起并在组件串的正负极焊接出引线。 4、叠层 背面串接好且经过检验合格后,将组件串、玻璃和切割好的EVA 、太阳能电池背板按照一定的层次敷设好,准备层压。敷设时保证电池串与玻璃等材料的相对位置,调整好电池间的距离,为层压打好基础。(敷设层次:由下向上:玻璃、EVA、电池处、EVA、玻璃纤维、背板)。 5、组件层压 将敷设好的电池组件放入层压机内,通过抽真空将组件内的空气抽出,然后加热使EVA 熔化将电池、玻璃和太阳能电池背板粘接在一起;最后冷却取出组件。层压工艺是太阳能电池组件生产的关键一步,层压温度和层压时间根据EVA的性质决定。我们使用普通的EVA 时,层压循环时间约为21分钟,固化温度为138-140℃。 6、修边 层压时EVA熔化后由于压力而向外延伸固化形成毛边,所以层压完毕应将其切除。 7、装框 类似与给玻璃装一个镜框;给玻璃组件装铝框,增加组件的强度,进一步的密封电池组
四象限光电探测器的电路设计方案 一、原理 四象限光电探测器实际由四个光电探测器构成,每个探测器一个象限,目标光信号经光学系统后在四象限光电探测器上成像,如图1。一般将四象限光电探测器置于光学系统焦平面上或稍离开焦平面。当目标成像不在光轴上时,四个象限上探测器输出的光电信号幅度不相同,比较四个光电信号的幅度大小就可以知道目标成像在哪个象限上(也就知道了目标的方位),若在四象限光电探测器前面加上光学调制盘,则还可以求出像点偏离四象限光电探测器中心的距离或θ角来。 图1 目标在四象限光电探测器上成像 图2方位探测器原理框图。 信号通过放大和调理后由由A/D转换器(本系统中采用ADS7864)采样转换成数字量送入单片机,由单片机处理后得到目标的方位,并根据实际系统的需要输出方位控制指令。 二、电路设计 根据实际系统的需要,A/D转换器用ADS7864,单片机用最常见的89C51。 这里对ADS7864作一介绍。ADS7864是TI公司生产的12bit高性能模数转换器,片上带2.5V 基准电压源,可用作ADS7864的参考电压。每片ADS7864实际由2个转换速率为500ksps
的ADC构成,每个ADC有3个模拟输入通道,每个通道都有采样保持器,2个ADC组成3对模拟输入端,可同时对其中的1~3对输入信号同时采样保持,然后逐个转换。由于6个通道可以同时采样,很适合用来转换四象限光电探测器的4路光电信号,剩下2个通道作系统扩展用。 *下面主要介绍电路中的信号采样转换和处理部分。 ADS7864前端调理电路 模数转换器的前端调理电路缩放和平移要采样的信号,通过调理后的信号适合A/D转换器的模拟输入要求。图3是ADS7864一个输入通道的前端调理电路, 图3 ADS7864前端调理电路 ADS7864模拟输入通道的+IN和-IN的最大电压输入范围为-0.3V~+5.3V(ADS7864 +5V供电)。图3的电路中使用了2个运放,A1用作跟随器,用来缓冲ADS7864输出的2.5V基准电压源;A2和四个电阻构成了信号调理网络,适当配置R1~R4电阻可以实现对输入信号Vi的缩放和平移以适合ADS7864模拟通道的输入要求。+IN端的输入电压表示如下:
太阳能系统配置使用太阳能板蓄电池选用计算 方式 WTD standardization office【WTD 5AB- WTDK 08- WTD 2C】
太阳能系统配置使用太阳能板,蓄电池及控制器选用计算方式 以下公式字母代表: I(工作电流)U(工作电压) H(工作时间) T(阴雨天数) h (光照时间) W(光源功率) C(蓄电池容量) Up(太阳能电池电压) WP(太阳能电池板功率) η(预留系数) 其中:太阳能电池电压已知:预留系数:120% 一:首先计算出电流 (I= W/U) 如:12V蓄电池系统; 40W的灯2只,共80瓦。电流 = 80W÷12V = 二:计算出蓄电池容量需求 (C=I*H*(T+1)*η) 如:路灯每夜累计照明时间需要为满负载 8小时(h);(如晚上8:00开启,夜11:30关闭1路,凌晨4:30开启2路,凌晨6:30关闭) 需要满足连续阴雨天5天的照明需求。(5天另加阴雨天前一夜的照明,计6天) 蓄电池 = × 8h ×(5+1)天 = × 48h = 另外为了防止蓄电池过充和过放,蓄电池一般充电到90%左右;放电余留20%左右。 所以也只是应用中真正标准的70%左右。实际容量计算方法:实际蓄电池需求= 加20%预留容量、再加20%损耗÷ 80% ×120% = 三:计算出电池板的需求峰值(WP) (WP=(I*H*η)Up/h) 路灯每夜累计照明时间需要为 8小时(h); ★:电池板平均每天接受有效光照时间为小时(h);最少放宽对电池板需求20%的预留额。 WP÷ = (× 8h × 120%)÷ WP÷ = WP = (W)
太阳能电池组件主要封装材料的特性 一、钢化玻璃 1. 加工原理 钢化玻璃是平板玻璃的二次加工产品,钢化玻璃的加工可分为物理钢化法和化学钢化法。太阳能电池组件对钢化玻璃的透光率要求很高,须大于91.6%,对大于1200nm 的红外光有较高的反射率。另外,厚度要求在3.2mm 。 1)物理钢化玻璃又称为淬火钢化玻璃(将金属工件加热到某一适当温度并保持一段时间,随即浸入淬冷介质中快速冷却)。这种玻璃处于内部受拉,外部受压的应力状态,一旦局部发生破损,便会发生应力释放,玻璃被破碎成无数小块,这些小的碎片没有尖锐棱角,不易伤人。 2)化学钢化玻璃是通过改变玻璃表面的化学组成来提高玻璃的强度,一般是应用离子交换法进行钢化。其效果类似于物理钢化玻璃。 2. 钢化玻璃的主要优点: 1)强度比普通玻璃提高数倍,抗弯强度是普通玻璃的3-5倍,抗冲击强度是普通玻璃5-10倍,提高强度的同时亦提高了安全性。 2)使用安全,其承载能力增大,改善了易碎性质,即使钢化玻璃破坏也呈无锐角的小碎片,极大地降低了对人体的伤害。钢化玻璃的耐急冷急热性比普通玻璃提高2-3倍,一般可承受150LC 以上的温差变化,对防止热炸裂有明显的效果。
钢化玻璃具有良好的热稳定性,能承受的温差是普通玻璃的3倍,可承受200℃的温差变化。 3. 钢化玻璃的缺点: 1)钢化后的玻璃不能再进行切割或加工,只能在钢化前就对玻璃进行加工至需要形状,再进行钢化处理。 2)钢化玻璃强度虽然比普通玻璃强,但是钢化玻璃在温差变化大时有自爆(自己破裂)的可能性,而普通玻璃不存在自爆的可能性。(钢化玻璃在无直接机械外力作用下发生的自动性炸裂叫做钢化玻璃的自爆。) 4. 自爆现象: 1)玻璃质量缺陷的影响 A .玻璃中有结石、杂质:玻璃中有杂质是钢化玻璃的薄弱点,也是应力集中处。 结石若处在钢化玻璃的张应力区是导致炸裂的重要因素。结石存在于玻璃中,与玻璃体有着不同的膨胀系数, 玻璃钢化后结石周围裂纹区域的应力集中成 倍地增加。当结石膨胀系数小于玻璃,结石周围的切向应力处于受拉状态,伴随结石而存在的裂纹扩展极易发生。 B .玻璃中含有硫化镍结晶物 硫化镍夹杂物一般以结晶的小球体存在,直径在0.1-2㎜。外表呈金属状,这些杂夹物是NI3S2,NI7S6和NI-XS ,其中X=0-0.07。只有NI1-XS 相是造成钢化玻璃自发炸碎的主要原因。
紫外探测器:碳化硅(SiC)材质,响应波段200-400nm。应用:火焰探 测和控制、紫外测量、控制杀菌灯光、医疗灯光的控制等。———————————————————————————————————————————— 可见光探测器:硅(Si)材质,响应波段200-1100nm。有室温、热电制 冷两种形式,可以带内置前放,有多种封装形式可选。主要用在测温、 激光测量、激光检测、光通信等领域。 ———————————————————————————————————————————— 红外探测器(1):锗(Ge)材质,响应波段0.8-1.8um,有室温、热电制 冷、液氮制冷三种形式,可以带内置前放,有多种封装形式可选。主要 应用在光学仪表、光纤测温、激光二极管、光学通信、温度传感器等 ———————————————————————————————————————————— 红外探测器(2):铟钾砷(InGaAs)材质,响应波段0.8-2.6um,波段内 可以进行优化。有室温、热电制冷、液氮制冷三种形式,可以带内置前 放,可以配光纤输出,多种封装形式可选。主要应用在光通信、测温、 气体分析、光谱分析、水分分析、激光检测、激光测量、红外制导等领 域。 ———————————————————————————————————————————— 红外探测器(3):砷化铟(InAs)材质,响应波段1-3.8um,有室温和热 电制冷两种,可以配内置前放,多种封装形式可选。主要用于激光测量、 光谱分析、红外检测、激光检测等领域。
红外探测器(4):锑化铟(InSb)材质,响应波段2-6um,液氮制冷, 可以带内置前放,多种封装形式可选。主要应用在光谱测量、气体分析、 激光检测、激光测量、红外制导等领域。———————————————————————————————————————————— 红外探测器(5):硫化铅(PbS)材质,响应波段为1-3.5um,有室温和 热电制冷两种,可以带内置前放,多种封装形式可选。主要应用在NDIR 光谱学、光学测温、光谱学、湿气分析,火焰探测、火星探测等。———————————————————————————————————————————— 红外探测器(6):硒化铅(PbSe)材质,响应波段为1-4.5um,有室温 和热电制冷两种,可以带内置前放,多种封装形式可选。主要应用在 NDIR光谱学、光学测温、光谱学、湿气分析,火焰探测、火星探测等。———————————————————————————————————————————— 红外探测器(7):碲镉汞(HgCdTe)材质探测器:响应波段2-26um, 可以对不同的波段进行优化,分为光伏型和光导型,探测率高,响应时 间快,有室温、热电制冷、液氮制冷三种形式可选。———————————————————————————————————————————— 雪崩光电探测器(APD):主要有硅、锗、铟钾砷三种材质,多种封 装形式可选。主要应用于光通信、遥感技术、功率测量、红外线测量、 温度测量、光通信、光谱仪,激光测距等领域。
太阳能电池板及其工作原理
太阳能电池板及其工作原理 性能及特点: 太阳能电池分为单晶硅太阳电池(坚固耐用,使用寿命一般可达20年。光电转换效率为15%。)多晶硅太阳电池(其光电转换效率约14.5%,材料制造简便,节约电耗,总的生产成本较低非晶硅太阳电池。)非晶硅太阳能电池(其光电转换率为10%,成本低,重量轻,应用方便。) 太阳能发电原理: 太阳能不象煤和石油一样用交通工具进行运输,而是应用光学原理,通过光的反射和折射进行直接传输,或者将太阳能转换成其它形式的能量进行间接传输。直接传输适用于较短距离。基本上有三种方法:基本上有三种方法:通过反射镜及其它光学元件组合,改变阳光的传播方向,达到用能地点;通过光导纤维,可以将入射在其一端的阳光传输到另一端,传输时光导纤维可任意弯曲;采用表面镀有高反
射涂层的光导管,通过反射可以将阳光导入室内。间接传输适用于各种不同距离。将太阳能转换为热能,通过热管可将太阳能传输到室内;将太阳能转换为氢能或其它载能化学材料,通过车辆或管道等可输送到用能地点;空间电站将太阳能转换为电能,通过微波或激光将电能传输到地面。 太阳能的光电转换是指太阳的辐射能光子通过半导体物质转变为电能的过程,通常叫做"光生伏打效应”,太阳电池就是利用这种效应制成的。 当太阳光照射到半导体上时,其中一部分被表面反射掉,其余部分被半导体吸收或透过。被吸收的光,当然有一些变成热,另一些光子则同组成半导体的原子价电子碰撞,于是产生电子-空穴对。这样,光能就以产生电子-空穴对的形式转变为电能、如果半导体内存在P-n结,则在P型和n型交界面两边形成势垒电场,能将电子驱向n 区,空穴驱向P区,从而使得n区有过剩的电子,P区有过剩的空穴,在P-n结附近形成与势垒电场方向相反光的生电场。光生电场的一部分除抵销势垒电场外,还使P型层带正电,n型层带负电,在n区与p区之间的薄层产生所谓光生伏打电动势。若分别在P型层和n型层焊上金属引线,接通负载,则外电路便有电流通过。如此形成的一个个电池元件,把它们串联、并联起来,就能产生一定的电压和电流,输出功率。 太阳能发电原理图如下:
太阳能电池组件的封装(精华) 导读:单件电池片由于输出功率太小,难以满足常规用电需求,因此需要将其封装为组件以提高其输出功率。封装是太阳能电池生产中的关键步骤,没有良好的封装工艺,再好的电池也生产不出好的组件。电池的封装不仅可以使电池的寿命得到保证,而且还增强了电池的抗击强度。产品的高质量和高寿命是赢得客户满意的关键,所以组件的封装质量非常重要。 具有外部封装及内部连接、能单独提供直流电输出的最小不可分割的太阳能电池组合装置,叫太阳能电池组件,即多个单体太阳能电池互联封装后成为组件。太阳能电池组件是太阳能发电系统中的核心部分,也是太阳能发电系统中最重要的部分。 1.防止太阳能电池破损。晶体硅太阳能电池易破损的原因:晶体硅呈脆性;硅太阳能电池面积大;硅太阳能电池厚度小。 2.防止太阳能电池被腐蚀失效。太阳能电池的自然抗性差:太阳电池长期暴露在空气中会出现效率的衰减;太阳电池对紫外线的抵抗能力较差;太阳电池不能抵御冰雹等外力引起的过度机械应力所造成的破坏;太阳电池表面的金属化层容易受到腐蚀;太阳电池表面堆积灰尘后难以清除。 3.满足负载要求,串联或并联成一个能够独立作为电源使用的最小单元。由于单件太阳电池输出功率难以满足常规用电需求,需要将它们串联或者并联后接入用电器进行供电。 太阳能电池组件的种类较多,根据太阳能电池片的类型不同可分为晶体硅(单、多晶硅)太阳能电池组件、非晶硅薄膜太阳能电池组件及砷化镓电池组件等;按照封装材料和工艺的不同可分为环氧树脂封装电池板和层压封装电池组件;按照用途的不同可分为普通型太阳能电池组件和建材型
太阳能电池组件。其中建材型太阳能电池组件又分为单面玻璃透光型电池组件、双面夹胶玻璃电池组件和双面中空玻璃电池组件。由于用晶体硅太阳能电池片制作的电池组件应用占到市场份额的85%以上,在此就主要介绍用晶体硅太阳能电池片制作的电池组件。 单晶硅组件 多晶硅组件 非晶硅组件 第一代室温硫化硅橡胶封装 第二代聚乙烯醇缩丁醛 (PVB )封装 第三代乙烯-醋酸乙烯共聚物(EVA )封
万方数据
万方数据
万方数据
万方数据
四象限探测器光斑中心定位算法研究 作者:陈梦苇, 杨应平, 贾信庭, 冷芬, CHEN Mengwei, YANG Yingping, JIA Xinting, LENG Fen 作者单位:陈梦苇,杨应平,贾信庭,CHEN Mengwei,YANG Yingping,JIA Xinting(武汉理工大学理学院 武汉430070), 冷芬,LENG Fen(华为武汉研究所 武汉430074) 刊名: 武汉理工大学学报(交通科学与工程版) 英文刊名:Journal of Wuhan University of Technology(Transportation Science & Engineering) 年,卷(期):2013,37(5) 参考文献(8条) 1.王庆友光电技术 2006 2.杨翠;邹建;刘得志四象限光电探测器定位误差分析[期刊论文]-传感器与微系统 2009(05) 3.匡萃方;冯其波;刘 斌背景光对四象限探测器干扰的研究[期刊论文]-激光与红外 2004(06) 4.张鹏炜;张智诠;谢劲冰一种基于四象限探测器的深孔直线度测量方法的研究[期刊论文]-光学技术 2007(05) 5.徐代升四象限探测系统信号光斑的优化设计[期刊论文]-湖南理工学院学报(自然科学版) 2007(01) 6.马育锋;龚沈光基于MSP430单片机的多路信号采集系统[期刊论文]-武汉理工大学学报(交通科学与工程版) 2009(02) 7.胡贤龙;周世椿几种四象探测器测角算法的分析研究 2007(06) 8.TAN Qianli The application of quadrant photodetector module on laser guidance technol[期刊论文]-Semicondutor Optoelectronics 2005(02) 本文链接:https://www.doczj.com/doc/9d11827940.html,/Periodical_whjtkjdxxb201305051.aspx
四象限探测器在太阳能电池板自动跟踪系统中的应用 摘要:采用四象限探测器作为前端探测单元,介绍了利用光电技术、电子技术、自动控制技术以及精密的步进系统实现了太阳能板自动跟踪瞄准系统中的四象限探测器的应用设计。 Abstract:Adapt the four quadrant detector as the front detector .Introduced the steeping system based on optoelectronic technology, electronic technology, automatic control technology .Realized the designation of the automatic tracking system of solar panels.
目录 第一章应用背景 (3) 第二章名词解释 (3) 2.1 四象限探测器 (3) 2.2 步进电机 (5) 第三章系统的工作原理 (5) 3.1 系统工作过程 (5) 3.2 传感器工作原理 (6) 3.3 探测器放大器基本原理图 (8) 第四章系统的电路设计 (9) 第五章系统控制程序设计 (10) 第六章问题和缺陷 (11) 第七章结束语 (12)
一、四象限探测器在太阳能电池板自动跟踪系统中的应用背景: 太阳能热发电和太阳能光伏发电是目前利用太阳能发电的两种主要形式。光热是通过聚光加热介质, 推动燃气轮机做功发电。而光伏发电则通过太阳光照射光电池板将光能直接转化为电能。由于太阳能辐射到地球表面的能量密度比较低, 无论是对于太阳能光伏发电还是太阳能热发电, 能否经济高效利用太阳能的关键在于太阳聚光和跟踪水平的优劣。实验证明在相同条件下, 极轴式太阳能自动跟踪发电的发电量要比固定发电(用太阳能电池板固定朝南安装的方式对太阳能进行采集)提高40% 左右。而采用聚光技术对太阳跟踪又提出了更高的要求.目前主要的跟踪方式是根据地球自转以及GPS进行粗调节,利用光电传感器设计的系统进行精确调节跟踪,本文主要讲述四象限探测器在太阳能电池板自动跟踪系统中的应用。 二、名词解释 2.1、四象限探测器:是把4个性能完全相同的光伏电池板, 按照直角坐标要求排列而成的光伏探测器件, 它们之间有个十字形沟道相隔,如图I所示,其实物图如图II所示。
收稿日期:2014-05-13;修订日期:2014-06-17 基金项目:国家自然科学基金(11104366);重庆理工大学研究生创新基金(YCX2012310) 作者简介:薛继元(1987-),男,硕士生,研究方向为光电信息检测与处理三 导师简介:冯文林(1976-),男,教授,博士,主要从事光电材料与器件方面的研究三Email :wenlinfeng@https://www.doczj.com/doc/9d11827940.html, 太阳能电池板的输出特性与实际应用研究 薛继元1,冯文林2,3,赵芬2,杨晓占2 (1.重庆理工大学电子信息与自动化学院,重庆400054; 2.重庆理工大学光电信息学院,重庆400054; 3.时栅传感及先进检测技术重庆市重点实验室,重庆400054) 摘要:光伏照明系统中作为能量来源的太阳能电池板,其输出特性关系到能量转换效率的衡量以及最大功率跟踪精确性的判断。精确模拟了电池板的等效电路,并通过在Matlab/Simulink 中建立其模型,得出电池板输出功率会随着电压的不断增大,先增大再减小;而且随着光照强度的增强而增大和温度的升高而减小。此外,通过对电池板模型进行改善,得出电池板最大功率处所对应的电压值会随着并联电池板的数量增加而减小,但当并联电池板数量超过3时输出曲线就基本保持不变;最大功率峰值会随着串联电池板数量的增加先增大,当串联电池板数量超过一定值时最大功率值开始保持不变。这为光伏照明系统的建立提供良好的理论支持。 关键词:光伏;太阳能电池板;Matlab/Simulink ;输出特性 中图分类号:TP337文献标志码:A 文章编号:1007-2276(2015)01-0176-06 Output characteristic and application for solar panel Xue Jiyuan 1,Feng Wenlin 2,3,Zhao Fen 2,Yang Xiaozhan 2 (1.College of Electronic Information and Automation,Chongqing University of Technology,Chongqing 400054,China; 2.College of Optoelectronic Information,Chongqing University of Technology,Chongqing 400054,China; 3.Chongqing Key Laboratory of Time Grating Sensing &Advanced Testing Technology,Chongqing 400054,China) Abstract:The solar panel is power source in the photovoltaic lighting system,and the output characteristic is a significant factor as assessing energy transformation and maximum power point tracking (MPPT)efficiency.In this paper,the module of the solar panel was built by using Matlab/Simulink,and the equivalent circuit of solar panel was also been simulated accurately.On one hand,the output power firstly increased if the voltage grew,and then decreased if the voltage continually grew.On the other hand,the output power could increase when the temperature decreased or when the intensity of illumination increased.In addition,the voltage at the maximum power would decrease if the number of the paralleled solar panels increased,but the tendency would keep the same when the number of the solar panel was bigger than 3.And the maximum output power would increase with the number of the series ’panels increasing.However,the maximum output power would remain unchanged when the number of the panels was more than a certain quantity.This present work can provide theoretical support for building the photovoltaic lighting system. Key words:photovoltaic; solar panels;Matlab/Simulink;output characteristic 第44卷第1期 红外与激光工程2015年1月 Infrared and Laser Engineering Jan
太阳能电池板方阵安装角度怎样计算? 由于太阳能是一种清洁的能源,它的应用正在世界范围内快速地增长。利用太阳光发电就是一种使用太阳能的方式,可是目前建设一个太阳能发电系统的成本还是较高的,从我国现阶段的太阳能发电成本来看,其花费在太阳电池组件的费用大约为60~70%,因此,为了更加充分有效地利用太阳能,如何选取太阳电池方阵的方位角与倾斜角是一个十分重要的问题。 1.方位角 太阳电池方阵的方位角是方阵的垂直面与正南方向的夹角(向东偏设定为负角度,向西偏设定为正角度)。一般情况下,方阵朝向正南(即方阵垂直面与正南的夹角为0°)时,太阳电池发电量是最大的。在偏离正南(北半球)30°度时,方阵的发电量将减少约10%~15%;在偏离正南(北半球)60°时,方阵的发电量将减少约20%~30%。但是,在晴朗的夏天,太阳辐射能量的最大时刻是在中午稍后,因此方阵的方位稍微向西偏一些时,在午后时刻可获得最大发电功率。在不同的季节,太阳电池方阵的方位稍微向东或西一些都有获得发电量最大的时候。方阵设置场所受到许多条件的制约,例如,在地面上设置时土地的方位角、在屋顶上设置时屋顶的方位角,或者是为了躲避太阳阴影时的方位角,以及布置规划、发电效率、设计规划、建设目的等许多因素都有关系。如果要将方位角调整到在一天中负荷的峰值时刻与发电峰值时刻一致时,请参考下述的公式。至于并网发电的场合,希望综合考虑以上各方面的情况来选定方位角。方位角=(一天中负荷的峰值时刻(24小时制)-12)×15+(经度-116)10月9日北京的太阳电池方阵处于不同方位角时,日射量与时间推移的关系曲线。在不同的季节,各个方位的日射量峰值产生时刻是不一样的。 2.倾斜角 倾斜角是太阳电池方阵平面与水平地面的夹角,并希望此夹角是方阵一年中发电量为最大时的最佳倾斜角度。一年中的最佳倾斜角与当地的地理纬度有关,当纬度较高时,相应的倾斜角也大。但是,和方位角一样,在设计中也要考虑到屋顶的倾斜角及积雪滑落的倾斜角(斜率大于50%-60%)等方面的限制条件。对于积雪滑落的倾斜角,即使在积雪期发电量少而年总发电量也存在增加的情况,因此,特别是在并网发电的系统中,并不一定优先考虑积雪的滑
太阳电池组件成品技术规范 编写: 校对: 审核: 会签:、 、 、 、
、 、 批准: 太阳电池组件技术总规范 1目的 通过制定太阳电池组件技术总规范,使公司所生产的太阳能电池组件的生产及质量处于规范、可控的状态。保证产品质量,满足客户要求。 2适用范围 2.1本技术规范规定了太阳电池组件的技术要求、外观质量及性能要求。 2.2本技术规范适用于本公司生产的太阳能电池组件(客户另有要求除外)。 2.3本技术规范不能取代本公司与客户签订的技术协议。 3职责权限 3.1技术开发部制定太阳能电池组件成品技术总规范; 3.2公司各相关部门在电池组件生产、检验等环节依据本规范执行。 4引用文件 4.1 GB/T 9535 地面用晶体硅光伏组件——设计鉴定和定型(IEC 61215-2005,
IDT); 4.2 GB/T 20047.1-2006 光伏(PV)组件安全鉴定第1部分:结构要求(IEC 61730-1:2004); 4.3 GB/T 20047.2-2006光伏(PV)组件安全鉴定第2部分:试验要求(IEC 61730-2:2004); 4.4 QEH-2011-RD-I139A太阳电池组件用晶硅电池片技术规范V1.0; 4.5 QEH-2011- RD-I115A太阳电池组件用钢化玻璃技术规范V2; 4.6 QEH-2011- RD-I121A太阳电池组件用EVA技术规范V2; 4.7 QEH-2011- RD-I122A太阳电池组件用背板材料技术规范V2; 4.8 QEH-2011- RD-I114A太阳电池组件用焊带技术规范V1.2; 4.9 QEH-2011- RD-I123A太阳电池组件用接线盒技术规范V2.0; 4.10 QEH-2010-RD-I118A太阳电池组件用铝合金边框技术规范; 4.11 QEH-2011-RD-I119A 太阳电池组件用透明胶带技术规范V1.0; 4.12 QEH-2011-RD-I124太阳能电池组件制造工艺过程卡汇总V4.0; 4.13 IEC 60364-2005 Electrical installations of buildings-Part 5-51 Selection and erection of electrical equipment-Common rules. 5定义 5.1 组件:具有封装及内部连接的、能单独提供直流电输出的、不可分割的最小太阳能电池组合装置。 6内容 6.1 关键材料要求 用于制造晶硅太阳电池的所有材料应根据客户要求,考虑强度、耐用性、化学物
太阳能电池板功率计算 1.0绪论 光伏系统的规模和应用形式各异,如系统规模跨度很大,小到0.3~2W的太阳能庭院灯,大到MW级的太阳能光伏电站。其应用形式也多种多样,在家用、交通、通信、空间应用等诸多领域都能得到广泛的应用。尽管光伏系统规模大小不一,但其组成结构和工作原理基本相同。本文将简要介绍光伏系统结构,并重点介绍其功率计算方法。 2.0光伏系统组成 图1是一个典型的供应直流负载的光伏系统示意图。 图1 直流负载光伏系统 图2 光伏发电系统原理方框图 光伏系统中的几个主要部件: 1.光伏组件方阵:由太阳电池组件(也称光伏电池组件)按照系统需求串、并联而成,在太阳光照射下将太阳能转换成电能输出,它是太阳能光伏系统的核心部件。
2.蓄电池:将太阳电池组件产生的电能储存起来,当光照不足或晚上、或者负载需求大于太阳电池组件所发的电量时,将储存的电能释放以满足负载的能量需求,它是太阳能光伏系统的储能部件。目前太阳能光伏系统常用的是铅酸蓄电池,对于较高要求的系统,通常采用深放电阀控式密封铅酸蓄电池、深放电吸液式铅酸蓄电池等。 3.控制器:它对蓄电池的充、放电条件加以规定和控制,并按照负载的电源需求控制太阳电池组件和蓄电池对负载的电能输出,是整个系统的核心控制部分。随着太阳能光伏产业的发展,控制器的功能越来越强大,有将传统的控制部分、逆变器以及监测系统集成的趋势,如AES公司的SPP和SMD系列的控制器就集成了上述三种功能。 4.逆变器:在太阳能光伏供电系统中,如果含有交流负载,那么就要使用逆变器设备,将太阳电池组件产生的直流电或者蓄电池释放的直流电转化为负载需要的交流电。 太阳能光伏供电系统的基本工作原理就是在太阳光的照射下,将太阳电池组件产生的电能通过控制器的控制给蓄电池充电或者在满足负载需求的情况下直接给负载供电,如果日照不足或者在夜间则由蓄电池在控制器的控制下给直流负载供电,对于含有交流负载的光伏系统而言,还需要增加逆变器将直流电转换成交流电。光伏系统的应用具有多种形式,但是其基本原理大同小异。 3.0太阳能电池组件功率计算方法 硅太阳能发电板容量是指平板式太阳能板发电功率WP。太阳能发电功率量值取决于负载24h所能消耗的电力H(WH),由负载额定电源与负载24h所消耗的电力,决定了负载24h 消耗的容量P(AH),再考虑到平均每天日照时数及阴雨天造成的影响,计算出太阳能电池阵列工作电流IP(A)。 由负载额定电源,选取蓄电池公称电压,由蓄电池公称电压来确定蓄电池串联个数及蓄电池浮充电压VF(V),再考虑到太阳能电池因温度升高而引起的温升电压VT(v)及反充二极管P-N结的压降VD(V)所造成的影响,则可计算出太阳能电池阵列的工作电压VP(V),由太阳电池阵列工作电源IP(A)与工作电压VP(V),便可决定平板式太阳能板发电功率WPW,从而设计出太阳能板容量,由设计出的容量WP与太阳能电池阵列工作电压VP,确定硅电池平板的串联块数与并联组数。 太阳能电池阵列的具体设计步骤如下: 1.计算负载24h消耗容量P。 P=H/V H——负载24小时消耗的电力(WH,瓦˙时)
光电系统设计报告 设计题目:四象限位置测量 系统设计实验 专业班级: 学生姓名: 学生学号: 指导教师: 设计时间: 2017/12/29
1、设计题方案论证; 实验采用激光器作为光源,四象限探测器作为光电探测接收器,根据电子和差式原理,实现可以直观、快速观测定位跟踪目标方位的光电定向装置,是目前应用最广泛的一种光电定向方式。 光发射电路主要由光源驱动器、光源(主要是半导体光源,包括LED、LD 等)、光功率自动控制电路(APC)等部分组成。用NE555组成的脉冲发生电路来驱动650nm的激光器。 四象限位置测量器是以光导模式工作的光伏探测器件。它利用集成电路光刻技术将一个探测器件光敏面窗口分割成4个面积相等、形状相同、位置对称的区域而形成,4个探测区域具有基本相同的性能参数。作为一种常用的位置敏感器件,当入射光点落在器件感光面的不同位置时,四象限探测器输出不同的电信号,通过对此电信号进行处理,可以确定入射光点在感光面上的位置。四象限光电探测器广泛应用于激光准直、测角、自动跟踪等精密光电检测系统中,通过对光斑中心位置的精确定位来检测位移或偏角的大小。 它利用半导体材料吸收光子能量引起的电子跃迁,将光信号转换为电信号。通常是利用集成光路光刻技术将完整的PN结光电二极管的光敏面分割成几个具有相同形状和面积、位置对称的区域,每个区域可以看作1个独立的光电探测器,其背面仍为一整片。理想情况下每个区域都具有完全相同的性能参量。 影响四象限光电检测系统工作精度的因素主要包括外围大气环境、目标光斑大小和光斑能量分布以及系统本身采用的算法、器件响应差异和噪声所带来的四象限不均匀性。
太阳能电池组件的封装
太阳能电池组件的封装 (二)组件的封装结构 (三)组件的封装材料 1上盖板2黏结剂3底板4边框(四)组件封装的工艺流程 不同结构的组件有不同的封装工艺。平板式硅太阳能电池组件的封装工艺流程,如图17所示。可将这一工艺流程概述为:组件的中间是通过金属导电带焊接在一起的单体电池,电池上卞两侧均为EVA膜,最上面是低铁钢化白玻璃,背面是PVF复合膜。将各层材料按顺序叠好后,放人真空层压机内进行热压封装。最上层的玻璃为低铁钢化白玻璃,透光率高,而且经紫外线长期照射也不会变色。EVA膜中加有抗紫外剂和固化剂,在热压处理过程中固化形成具有一定弹性的保护层,并保证电池与钢化玻璃紧密接触。PVF复合膜具有良好的耐光、防潮、防腐蚀性能。经层压封装后,再于四周加上密封条,装上经过阳极氧化的铝合金边框以及接线盒,即成为成品组件。最后,要对成品组件进行检验测试,测试内容主要包括开路电压、短路电流、填充因
子以及最大输出功率等。 硅片划片切割工艺概况 1用激光来划片切割硅片是目前最为先进的,它使用精度高、而且重复精度也高、工作稳定、速度快、操作简单、维修方便。 2激光最大输出≧50W(可调)、激光波长为1.064μm、 切割厚度≦1.2mm、光源是用Nd:YAG晶体组成激光器、是单氪灯连续泵浦、声光调Q、并用计算机控制二维工作台可预先设定的图形轨迹作各种精确运动。 ± 部件分析: 1操作可分为外控与内控。 2计算机操作系统-有专用软件设立工作台划片步骤实现划片目标。 3电源控制盒-供应激光电源、Q电源驱动、水冷系统的输入电源进行分配及自控,当循环水冷系统出现故障时,自动断开激光电源及Q电源驱动盒的供电。 4激光电源盒-点燃氪灯的自动引燃恒流电源。 5 Q电源驱动盒-产生射频信号并施加到Q开
(19)中华人民共和国国家知识产权局 (12)发明专利申请 (10)申请公布号 (43)申请公布日 (21)申请号 201910331254.4 (22)申请日 2019.04.24 (71)申请人 南京航星通信技术有限公司 地址 210000 江苏省南京市经济技术开发 区恒园路龙港科技园A1栋901室 (72)发明人 潘运滨 (74)专利代理机构 南京禾易知识产权代理有限 公司 32320 代理人 张松云 (51)Int.Cl. H03F 3/68(2006.01) H03G 9/00(2006.01) (54)发明名称一种四象限探测器信号放大电路(57)摘要本发明涉及一种四象限探测器信号放大电路,包括四象限探测器,还包括与所述四象限探测器依次连接的跨阻放大器、电压放大电路和限幅放大电路,所述四象限探测器的四象限经光电转换后的电流输出信号分别传输至跨阻放大器、电压放大电路和限幅放大电路进行信号放大。首先采用跨阻放大器,通过交流耦合,限制光电二极管的直流噪声,运算放大器正向端电阻用于补偿光电二极管漏电流,与其并联的电容用于消减电阻热噪声,提高信噪比;再通过电压放大电路的反馈网络控制信号的放大倍数,最后通过限幅放大电路,采用宽带高增益限压放大器实现限幅放大并通过反馈网络决定放大倍数,实现高增益 和高带宽的效果。权利要求书2页 说明书4页 附图2页CN 110086442 A 2019.08.02 C N 110086442 A
权 利 要 求 书1/2页CN 110086442 A 1.一种四象限探测器信号放大电路,包括四象限探测器,其特征在于:还包括与所述四象限探测器依次连接的跨阻放大器、电压放大电路和限幅放大电路,所述四象限探测器的四象限经光电转换后的电流输出信号分别传输至跨阻放大器、电压放大电路和限幅放大电路进行信号放大。 2.根据权利要求1所述的四象限探测器信号放大电路,其特征在于:所述跨阻放大器由光电二极管D1、电阻R1、电阻R2、电阻Rf、电容Ci、电容CI、电容C2、电容Cf和运算放大器A1组成,所述四象限探测器的偏置电压输入光电二极管D1的正极,光电二极管D1的负极分别连接电阻R1、电容Ci和电容CI的一端,电容CI的另一端连接运算放大器A1输入端负极,电阻R1、电容Ci的另一端接地,所述电阻R2和电容C3并联后一端连接运算放大器A1输入端正极,另一端接地,所述电阻Rf和电容Cf并联后连接在运算放大器A1输入端负极和输出端的两端,所述运算放大器A1输出端连接电压放大电路。 3.根据权利要求2所述的四象限探测器信号放大电路,其特征在于:所述电压放大电路包括高速运算放大器D2,电阻R12至电阻R15,电容C34至电容C41,所述高速运算放大器D2的型号为ADA4899,所述运算放大器A1的输出端连接高速运算放大器D1输入端正极,高速运算放大器D2输入端正极经电阻R15接地,所述电阻R12、电阻R13和电容C34组成反馈网络电路,电阻R12和电容C34并联后一端连接高速运算放大器D2的反馈端,另一端分别连接电阻R13和高速运算放大器D2的输入端负极,所述电容C38、电容C39、电容C40和电容C41的一端连接运算放大器D2电压端负极,电容C35和电容C36的一端连接运算放大器D2电压端正极和DISB 端,电阻R14的一端连接运算放大器D2输出端,电阻R14、电阻R13、电容C35、电容C36、电容C38至电容C41的另一端接地,所述运算放大器D2输出端经电容C37连接限幅放大电路。 4.根据权利要求1所述的四象限探测器信号放大电路,其特征在于:所述限幅放大电路包括宽带高增益限压放大器U3、电阻R25至电阻R33,电容C61至电容C67和SAM接头,所述宽带高增益限压放大器U3的型号为OPA699,所述电阻R27和电容C62并联后一端连接宽带高增益限压放大器U3输入端负极和电阻R28的一端,另一端连接宽带高增益限压放大器U3输出端,所述电阻R29、电容C65、电容C66和电阻R32的一端连接宽带高增益限压放大器U3电压端负极,所述电阻R32的另一端、电阻R33和电容C67的一端连接宽带高增益限压放大器U3低电位端,所述电阻R25、电阻R26和电容C61的一端连接宽带高增益限压放大器U3高电位端,电阻R26的另一端、电容C63和电容C64的一端连接宽带高增益限压放大器U3电压端正极,宽带高增益限压放大器U3输出端经电阻R30连接SAM接头,所述电阻R31的一端连接电阻R29,电阻R31、电阻R28、电阻R25、电阻R33、电容C61、电容C63至电容C67的另一端接地。 5.根据权利要求2所述的四象限探测器信号放大电路,其特征在于:所述电阻R1为限流电阻,所述电容Ci为寄生输入总电容,电容CI为交流耦合电容,运算放大器A1低频段的噪声电压增益为1+电阻Rf值/电阻R1值,运算放大器A1高频段的噪声电压增益为1+(电容Ci值//电容Cl值)/电容Cf值。 6.根据权利要求1所述的四象限探测器信号放大电路,其特征在于:还包括电源电路和与所述电源电路连接的低噪声稳压电路,用于给信号放大电路提供电源,所述电源电路包括型号为LT1931负输出稳压器和型号为MP1593降压型电源模块,所述负输出稳压器用于将外部12V电源电压转换为-6V电压输出,所述降压型电源模块用于将外部12V电源电压转换为5V电压输出,所述低噪声稳压电路采用型号为Tps7a4700和Tps7a3301的低压降线性稳压 2