基于单片机的步进电机的驱动控制
摘要:介绍了以AT89C51单片机为内核,实现步进电机的单步进给和连续进给,利用延时程序送脉冲,实现步进电机运行特点。键盘设置步进电机的速度、转向、工作方式、步数,速度和步数都为步进设置,给出了步进电机的序列脉冲波形图及电路图,此系统中有多个速度和不同步数可选。该电路简单,其可靠性强,运行稳定,不易受干扰。
关键词:单片机;控制;步进电机;自动进给
中图分类号:TP368.1;TM383.6 文献标识码:B 文章编号:1004-0420(2009)06-0042-05
Drive control of stepping motor based on SCM
DAI Zi-feng,WU Feng
(Zhejiang People Electric Appliance, 325604)
Abstract:This article introduces the AT89C51 microcontroller as the core, to achieve a single-step to the stepper motor and continuous feed, using time delay procedures to send pulses to achieve the operational features of stepper motors. Keyboard settings stepper motor speed, steering, working m ethods, steps, speed and step number are set for the step given stepper motor pulse sequence diagrams and schematics, this system has multiple speeds and are not synchronized the number of options. The circuit is simple, its reliability, stable operation, is not susceptible to interference.
Key words:microcontroller; control; stepper motor; autom atic feed
数控技术是制造实现自动化,集成化的基础,是提高产品质量,提高劳动生产率的物资手段。本设计是用单片机来实现步进电机的单步进给和连续进给。
1 设计内容
本设计主要是步进电机的控制电路。根据步进电机的工作原理,采用脉冲分配器和功率放大器使步进电机工作。
2 设计要求
a.步进电机能够正反转;
b.步进电机的进给速度可调,并能进行步进控制;
c.步进电机的工作方式可调。
3 方案的初步选定
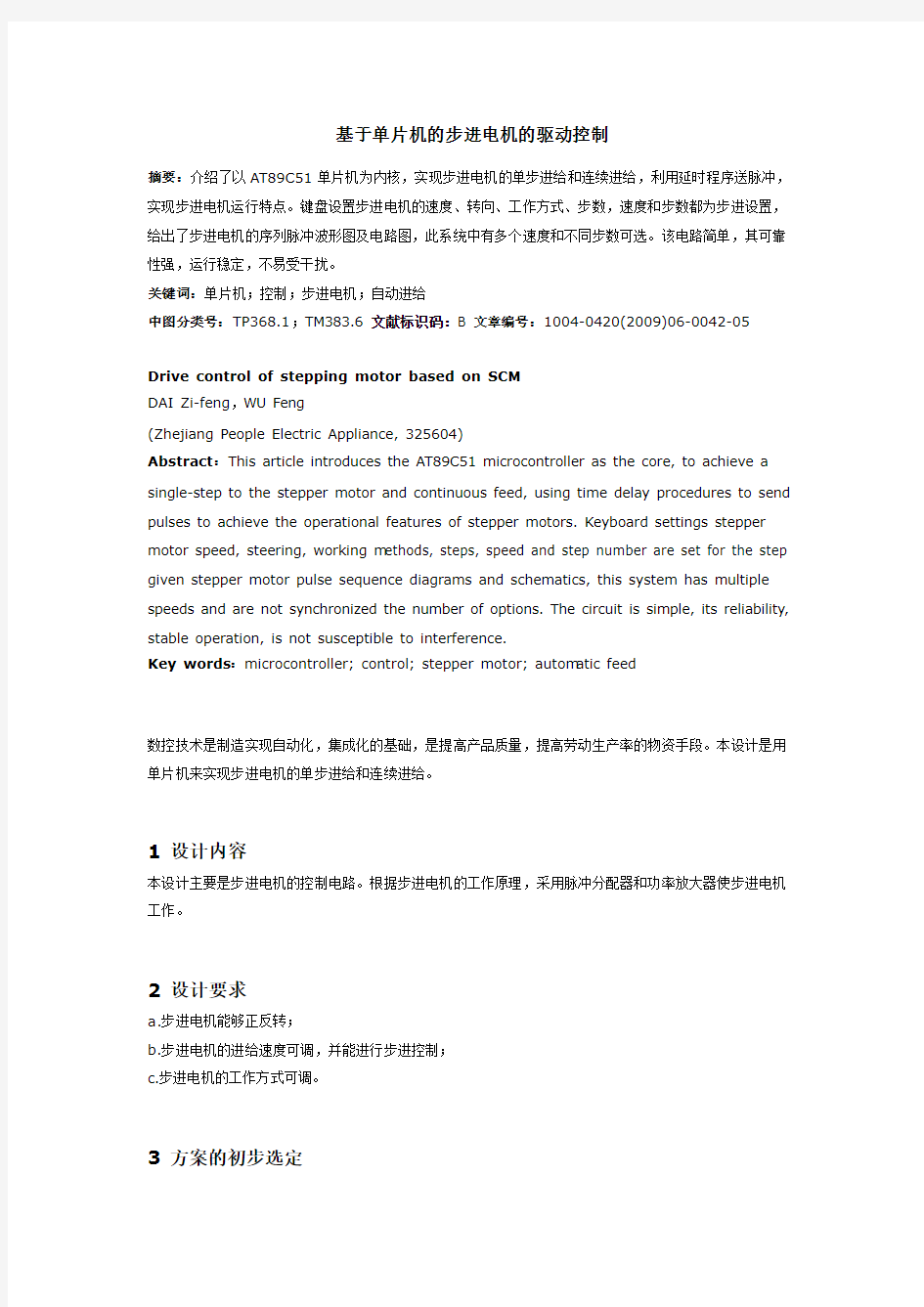
数控自动进给的伺服系统采用功率步进电机作为伺服装置。数控自动进给装置的电子控制部分主要是实现对步进电机的控制(图1)。
图1 设计方案框图
振荡电路:产生具有一定频率的连续脉冲信号;
分频电路:对振荡电路产生的连续信号,经分频电路产生几种不同频率的脉冲信号,使步进电机获得不同转速;
脉冲分配器:将连续的脉冲信号按步进电机的工作方式分配成步进电机所需的脉冲信号;
驱动电路:将脉冲分配器的输出信号进行功率放大,驱动步进电机工作;
速度控制电路:使步进电机获得不同频率的脉冲信号,从而获得不同的速度;
步进电机的工作方式和正反转控制电路:根据步进电机不同的工作方式控制其正转和反转。
4 系统硬件电路设计
4.1步进电机
4.1.1步进电机特点
步进电机作为自动控制领域中的主要控制元件之一,具有以下应用特点:
a.在单片机应用系统中,它可以直接接受由计算机系统输出的数字信号;
b.可方便地实现机械位移。例如,步进电机配合丝杠和齿轮可把角度变化转变为直线位移;
c.控制灵敏度高。步进电机具有快速起动和快速停止的能力,能在瞬间实现起、停;
d.速度变化时不失步。一般步进电机的速率为200~1 000步/秒,在速率变化时,不会失步;
e.步距角变化大、精度高。在没有齿轮减速的情况下,步距角范围90°~0.36°/步;
f.能精确返回原位。无论变阻式步进电机还是永磁式步进电机,都能精确地返回电机的起始位置;
g.控制脉冲与角度位移能精确同步。在单片机控制应用系统中,可以利用电机控制脉冲与它的角位移精确同步的特点,实现对物理量的控制;
h.控制方便、可靠,精确定位。例如,在执行机构的控制中,步进电机可方便的带动多圈电位器或旋转变压器,以调节电压或电流,实现对执行机构的控制。
4.1.2步进电机的类型及选择
现在比较常用的步进电机包括反应式步进电机(VR)、永磁式步进电机(PM)、混合式步进电机(HB)和单相式步进电机等。
a.永磁式步进电机一般为两相,转矩和体积较小,步进角一般为7.5°或15°;
b.反应式步进电机一般为三相,可实现大转矩输出,步进角一般为1.5°,但噪声和振动都很大。反应式步进电机的转子磁路由软磁材料制成,定子上有多相励磁绕组,利用磁导的变化产生转矩;
c.混合式步进电机是指混合了永磁式和反应式的优点。它又分为两相和五相:两相步进角一般为1.8°而五
相步进角一般为0.72°。这种步进电机的应用最为广泛。
4.1.3步进电机计算
两相步进电机:
齿距角:Qz=2π/ZZ-转子的齿数,转子的齿数为50,则齿距角为Qz=2π/50=7.2°;步距角-转子走一步所转过的角度;步距角:Qn=Qz/N=2π/NZN-步进电机工作拍数;步进电机转速:n=60×f/N×Z(转/分)f-脉冲频率(Hz)。
4.1.4步进电机的序列脉冲的波形图
步进电机序列脉冲的波形如图2所示。
图2 步进电机序列脉冲波形图
4.1.5两相步进电机的三种工作方式
步进电机有两种工作方式:
单拍,通电顺序为:A-B--
双拍,通电顺序为:AB-B--A
两相八拍,通电顺序为:A-AB-B-B----A
如果按以上三种通电方式和通电顺序向步进电机输入序列脉冲,电机正向转动;如果通电方向与上面相反,则步进电机反向转动(四相、五相、六相步进电机的工作方式与三相电机相同)两相步进电机有三种运行状态:
a.步进电机为两相单四拍运行状态:当电机绕组通电时序为A-B--时为正转,通电时序为A---B时为反转;当N=4,步距角Qn=Qz/N=2π/NZ=360°/4*5=18°,则步进电机转一圈所需步进数:360°/18°=20(步进数);
b.步进电机为两相双四拍运行状态:当电机绕组通电时序为:AB-B--A时为正转,通电时序为A/-//-/B-BA 时为反转。
当N=4时,步距角:Qn=Qz/N=2π/NZ=360/4*5=18°,则步进电机转一圈所需步进数:
360°/18°=20(步进数);
c.步进电机为两相八拍运行状态:当电机绕组通电时序为:A-AB-B-B----A时为正转,通电时序为:
A-A----B-B-BA时为反转。
当N=8时,步距角Qn=Qz/N=2π/NZ=360/8*5=9°,则步进电机转一圈所需步进数:360°/9°=40。
4.1.6两相步进电机的数学模型
单拍的步进电机的数学模型如表1。
表1单拍的步进电机的数学模型
(三相、四相、五相、六相步进电机的工作方式与三相电机类似)4.2单片机最小系统
4.2.189C51的特点
最小单片机系统如图3。
两相八拍的步进电机的数学模型如表2
表2两相八拍的步进电机的数学模型
(三相、四相、五相、六相步进电机的工作方式与三相电机类似)
&, nbsp;
图3 单片机最小系统(EA 接高电平)
89C51有4K快闪程序存储器、128单元的数据存储器、64KROM、64KRAM、32条并行I/O口线、1个串行UART、五个中断源、两个定时器/计数器、工作频率在0~24 MHz,该器件采用ATMEL高密度非易失存储器制造技术制造,与工业标准的MCS-51指令集和输出管脚相兼容。由于将多功能8位CPU和闪烁存储器组合在单个芯片中,ATMEL的AT89C51是一种高效微控制器,为很多嵌入式控制系统提供了一种灵活性高且价廉的方案。本系统采用了频率为12 MHz的晶振,选用晶振的好处在于能使系统运行一个周期只用1 μs,这样有利于系统时间的计算。采用了手动复位和上电复位的常用复位电路。
4.2.2显示电路
采用最简单的数码管显示如图4,显示步数和速度即可。用P0或P2口分别驱动一个七段数码管。因为数码管是在P0和P2口在低电平时才会有电流流过,因此它的驱动电流:5/100=0.05 A。
4.2.3键盘电路
键盘电路如图5
图4显示电路图图5键盘电路图
1号键接P3.0;2号键接P3.1;3号键接P3.2;4号键接P3.3。
设置的方法为:
a.在主程序中,P3.0为步进电机开始转动的按键;P3.1为步进电机开始步进的按键;P3.2为进入中断0的按键;P3.3为进入中断1的按键;
b.在中断0中,P3.0为设置工作方式:0-工作方式在单拍状态下工作;1-工作
方式在八拍状态下工作。
P3.1为设置速度增加的按键(都为步, 进设置):速度分为了18个段见表3。表3速度表格(转/秒)
c.在中断1中,P3.0为设置正反转:0-正转;1-反转。P3.1为设置步数(都为步进设置):步数分别有1、2、4、8、16、32、64、128单位分别为百步。4.2.4指示灯电路
指示灯电路如图6
图6 指示灯电路图
a.P1.1指示灯为运行指示灯,在运行时或单步进给时,指示灯亮;
b.P1.2指示灯为运行方式指示灯,在两相四拍运行时灯不亮,在两相八拍运行时灯亮;
c.INT0指示灯为中断0键按下指示灯,当有键按下时就亮,能确保按键有键按下;
d.INT1指示灯为中断1键按下指示灯,当有键按下时就亮,能确保按键有键按下。
4.2.5电源电路
电源电路如图7,电源电路用桥堆整流后通过2200 μF滤波,7805稳压,0.1 μF 电容去耦,就得到了稳定的DC 5 V电源。
图7电源电路图图8接口电路图
4.3步进电机驱动电路
4.3.1步进电机与单片机的接口电路
步进电机与单片机的接口电路如图8。
4.3.2工作原理
如图8所示,单片机与驱动之间加了一个反向器。当P1.0=0 P1.2=1时,L1相绕组通电。反之,当P1.0输出为1,P1.2输出为1,L1相绕组不通电。同理,P1.4、P1.6亦然。
4.3.3驱动和抗干扰问题
驱动器选用了最简单的反向器,使系统更简洁。大大减小了对元器件的干扰。软件里对键盘的采样使用了多次,使系统受干扰的可能性也降低了。
5 系统软件电路设计
5.1步进电机程序设计的主要任务
步进电机程序设计的主要任务是:
a.判断电机的旋转方向和速度;
b.按顺序传递控制脉冲;
c.判断所要求的控制步数是否传送完毕;
d.判断工作方式;
e.速度的设置;
f.正反转的设置;
g.步数的设置;
h.工作方式的设置。
总之,步进电机控制程序就是完成环行脉冲分配器的任务,以控制步进电机按照预先的设置转动。
5.2步进电机的程序设计思路
步进电机程序设计时,首先要对步进电机程序进行步进还是正常运行的判别,然后转移到相应的控制程序阶段,判断工作方式,判断正反转,再转到相应的程序,给出脉冲。正反转控制程序设计时,应分别按要求的控制顺序输出相应的控制模型,加上脉冲宽度的延时程序即可。软件延时方法:改变延时的时间长度就可以改变输出脉冲的宽度,但这种方法使CPU长时间等待,无法进行其它工作。
5.3控制程序流程图(图9~图12)
图9主程序框图图10运行程序框图
图11中断0设置框图图 12中断1设置框图6系统的调试
系统的硬件电路较为简单,稍做调试就可完成。
系统的软件调试当中,步进电机进给脉冲时间间隔采用了延时进给(因为本系统无需其他动作)。在延时进给脉冲时,系统不能以步进方式给出进给脉冲(比如说每按一次键是系统多延时5 s)。因单片机在处理带标点符号的数时比较麻烦,所以采用了不规则的方式步进设置。
7 问题及改进措施
7.1硬件问题及改进措施
选用的步进电机为两相永磁式步进电机,步距角较大。要求步距角小时无法实现。步进电机运行时有较小响声和振动,只需改变脉冲的输出频率即可。本系统键盘设置较小,使系统设置速度,步数时有局限性,只要扩展为4*4键盘即可。显示也只显示主要两位数值,如换用液晶显示器就可以带单位显示。
7.2软件问题及改进措施
软件中正反转判断和工作方式判断在脉冲给出4步(或8步)后进行再次判断,系统运行时会有小误差。只要每给出一步脉冲就进行判断则可以改变这一误差。系统延时采用了软件延时方法,使系统大部分时间在运行延时程序。如采用定时延时方法,则不占用单片机时间。
8结束语
近年来,单片机的应用正在不断地走向深入。在实时检测和自动控制的单片机应用系统中,还应将具体硬件结构与针对具体应用对象特点的软件有机结合,才算应用成功。
参考文献:
[1]张志良.单片机原理与控制技术[M].北京:机械工业出版社,2001.
[2]李朝青.单片机原理及接口技术[M].北京:北京航空航天大学出版社,2004.
[3]李朝青.单片机外围数字IC技术手册[M].北京:北京航空航天大学出版社,2005.
[4]肖洪兵.跟我学用单片机[M].北京:北京航空航天大学出版社,2002.8.
[5]何立民.单片机高级教程[M].北京:北京航空航天大学出版社,2001.
[6]赵晓安.MCS-51单片机原理及应用[M].天津:天津大学出版社,2001.3.
[7]李广第.单片机基础[M].北京:北京航空航天大学出版社,1999.
[8]徐惠民.单片微型计算机原理接口与应用[M].北京:北京邮电大学出版社,1996.
[9]夏继强.单片机实验与实践教程[M].北京:北京航空航天大学出版社, 2001.
一、设计任务书 设计内容:用80C51单片机设计一个步进电机控制器 设计要求: 1.用8015设计一个四相步进电机。 2.可控制步进电机的启动与停止,正转与反转。 3.10档速度调节。 4.点动控制。 5.可显示电机运行参数。 二、设计总体方案 (一)控制方式的选择 控制主要用于电机速度和方向的转换。控制方式有按键控制和开关控制两种。按键较开关而言,操作更加简便,故选按键控制。 方案一:独立按键。独立按键可自由连接,线路简单。 方案二:编码式键盘。编码式键盘的按键接触点接于74LS148芯片。当键盘上没有闭合时,所有按键都断开,当某一键闭合时,该键对应的编码由74LS148输出。 本次设计所需按键不多,不需要采用复杂编码,考虑硬件条件、线路连接和经济性等方面,选择方案一。 (二)电机电路设计方案的选择 由于条件的限制,对于电机的选择只能是实验台上最小步距角18°的电机,其中已包含了驱动电路。 (三)单片机的选择 方案一:AT89C51高性能8位单片机,内部集成CPU、存储器、寄存器、I/O接口,从而构成较为完整的计算机,价格便宜。 方案二:C8051F005单片机,该单片机是完全集成的混合信号系统及芯片,具有8051兼容的微控制器内核,与MCS-51指令集完全兼容。除了具有标准8052的数字外设部件,片内还继承了数据采集和控制系统中常用的模拟部件和其他数字外设及功能部件,执行速度快,但价格较贵。 本次课程设计是在仿真环境下进行,没有太过考虑单片机选择的问题,但就设计本身来讲,从物美价廉的角度考虑,选择方案一较合适。 (四)显示方案的选择 方案一:采用LED数码管。LED数码管是轮流现实的,其利用人烟的视觉暂留特性,使人感觉不到数码管闪动,看到每只数码管都常亮。利用其显示必须不停给数码管数据输入口循环赋值,显示内容较多,编程和接线较为复杂。 方案二:采用LCD1602液晶显示器。LCD1602具有功率小,效果明显,变成容易等优点,且它最多能显示2×16个字符,可以轻松满足设计要求。 由上可知,LCD1602液晶显示器的优点突出,故选择方案二。 (五)软件部分的选择 软件部分的选择主要是指编程语言的选择,编译调试工具根据设计平台选择伟福软件。编程语言主要有以下两种方案。
我上周刚做的这个实验成功拉,给你参考一下吧这可是我当时辛辛苦苦编出来的啊,不过我用的是L298驱动的和ULN2003一样,你把它换成2003就行拉 #include
for(j=200;j>0;j--); temp=P3; temp=temp&0x0f; if(temp!=0x0f) { temp=P3; temp=temp&0x0f; switch(temp) { case 0x0e: key=1; break; case 0x0d: key=2; break; case 0x0b: key=3; break; case 0x07: key=4; break; } temp=P3;
temp=temp&0x0f; while(temp!=0x0f) { temp=P3; temp=temp&0x0f; } } } P3=0xff; P3_5=0; temp=P3; temp=temp&0x0f; if(temp!=0x0f) { for(i=50;i>0;i--) for(j=200;j>0;j--); temp=P3; temp=temp&0x0f; if(temp!=0x0f) { temp=P3; temp=temp&0x0f; switch(temp)
基于51系列单片机控制步进电机调速实验 实验指导书 仇国庆编写 重庆邮电大学自动化学院 自动化专业实验中心 2009年2月
基于51系列单片机控制步进电机调速实验 实验目的及要求: 1、熟悉步进电机的工作原理 2、熟悉51系列单片机的工作原理及调试方法 3、设计基于51系列单片机控制的步进电机调速原理图(要求实现电机的速度反馈测量,测量方式:数字测量) 4、实现51系列单片机对步进电机的速度控制(步进电机由实验中心提供,具体型号42BYG )由按钮控制步进电机的启动与停止;实现加速、匀速、和减速控制。速度设定由键盘设定,步进电机的反馈速度由LED 数码管显示。 实验原理: 步进电机控制原理 一般电动机都是连续旋转,而步进电动却是一步一步转动的,故叫步进电动机。步进电机是数字控制电机,它将脉冲信号转变成角位移,即给一个脉冲信号,步进电机就转动一个角度,因此非常适合于单片机控制。步进电机可分为反应式步进电机(简称VR)、永磁式步进电机(简称PM)和混合式步进电机(简称HB)。因此步进电动机是一种把脉冲变为角度位移(或直线位移)的执行元件。步进电动机的转子为多极分布,定子上嵌有多相星形连接的控制绕组,由专门电源输入电脉冲信号,每输入一个脉冲信号,步进电动机的转子就前进一步。由于输入的是脉冲信号,输出的角位移是断续的,所 以又称为脉冲电动机。随着数字控制系统的发展,步进电动机的应用将 逐渐扩大。 步进电机区别于其他控制电机的最大特点是,它是通过输入脉冲信号来 进行控制的,即电机的总转动角度由输入脉冲数决定,而电机的转速由 脉冲信号频率决定。步进电机的驱动电路根据控制信号工作,控制信号 可以由单片机产生。 电机转子均匀分布着很多小齿,定子齿有三个励磁绕阻,其几 何轴线依次分别与转子齿轴线错开。0、1/3て、2/3て,(相邻 两转子齿轴线间的距离为齿距以て表示),即A与齿1相对齐, B与齿2向右错开1/3て,C与齿3向右错开2/3て,A'与齿5相对齐,(A'就是A,齿5就是齿1)下面是定转子的展开图:(图2所示)
本科毕业设计 基于单片机的步进电机控制系统的设计
摘要 随着自动控制系统的发展和对高精度控制的要求,步进电机在自动化控制中扮演着越来越重要的角色,区别于普通的直流电机和交流电机,步进电机可以对旋转角度和转动速度进行高精度控制。步进电机作为控制执行元件,是机电一体化的关键组成之一,广泛应用在各种自动化控制系统和精密机械等领域。 步进电机是将电脉冲信号转变为角位移或线位移的开环控制元件。在非超载的情况下,电机的转速、停止的位置只取决于脉冲信号的频率和脉冲数,而不受负载变化的影响,即给电机加一个脉冲信号,电机则转过一个步距角。 本系统介绍了一种基于单片机的步进电机控制系统的设计,包括了硬件设计和软件设计两部分。其中,硬件设计包括单片机最小系统、键盘控制模块、LCD显示模块、步进电机驱动模块、位置检测模块共5个功能模块的设计。系统软件设计采用C语言编写,包括主程序、数字键处理程序、功能键处理程序、电机驱动处理程序、显示模块、位置采集模块。 本设计采用STC89C52单片机作为主控制器,4*4矩阵键盘作为输入,LCD1602液晶作为显示,ULN2003A芯片驱动步进电机。系统具有良好的操作界面,键盘输入步进电机的运行距离;步进电机能以不同的速度运行,可以在不超过最大转速内准确运行到任意设定的位置,可调性较强;显示设定的运行距离和实际运行距离;方便操作者使用。关键词:单片机步进电机液晶显示键盘驱动
Design of the Stepping Motor Control System Based on SCM Qiu Haizhao (College of Engineering, South China Agricultural University, Guangzhou 510642,China) Abstract:With the development of automatic control system and the requirements of high-precision control, stepping motor control in automation is playing an increasingly important role, different from the common DC and AC motor, stepper motor rotation angle and rotational speed can be high-precision controlled. Stepper motor as a control actuator is a key component of mechanical and electrical integration, widely used in a variety of automated control systems and precision machinery and other fields. Stepper motor is the open-loop control components changing electric pulse signals into angular displacement or linear displacement .In the case of non-overloaded, the motor speed, stop position depends only on the pulse frequency and pulse number, regardless of load changes, that is, to add a pulse motor, the motor is turned a step angle. This system introduces a design of stepper motor control system based on single chip microcomputer, including hardware design and software design in two parts. Among them, the hardware design, including single chip minimal system, keyboard control module, LCD display module, the stepper motor drive module, position detection module five functional modules. System software design using C language, including the main program, process number keys, the key of function processes, motor driver handler, the display module, position acquisition module. This design uses STC89C52 microcontroller as the main controller, 4 * 4 matrix keyboard as an input, LCD1602 LCD as a display, ULN2003A chip as stepper motor driver. System has a good user interface, keyboard input stepper motor running distance; Stepper motor can run at different speed, and run to any given position accurately in any speed without exceeding the maximum speed, with a strong adjustable ; Display the running distance and the actual running distance, which is more convenient for the operator to use. Key words: SCM stepper LCD keyboard driver
南京XX大学 指导老师:张X 课程设计基于51单片机的步进电机控制 机械电子工程学院 测控技术与仪器 XXXXX Xxx 2012年1年4日
步进电机控制系统 [摘要]本课程设计的内容是利用51单片机,达到控制步进电机的启 动、停止、正转、反转、两档速度和状态显示的目的,使步进电机控制更加灵活。步进电机驱动芯片采用ULN2803,ULN2803具有大电流、高电压,外电路简单等优点。利用四位数码管增设电机状态显示功能,各项数据更直观。实测结果表明,该控制系统达到了设计的要求。 关键字:步进电机、数码管、51单片机、ULN2803 一步进电机与驱动电路 1.1 什么是步进电机 步进电机是一种将电脉冲转化为角位移的执行机构。通俗一点讲:当步进驱动器接收到一个脉冲信号,它就驱动步进电机按设定的方向转动一个固定的角度(及步进角)。可以通过控制脉冲个数来控制角位移量,从而达到准确定位的目的;同时也可以通过控制脉冲频率来控制电机转动的速度和加速度,从而达到调速的目的。 1.2 步进电机的种类 步进电机分永磁式(PM)、反应式(VR)、和混合式(HB)三种。永磁式步进一般为两相,转矩和体积较小,步进角一般为7.5度或15度;反应式步进一般为三相,可实现大转矩输出,步进角一般为1.5度,但噪声和振动都很大。在欧美等发达国家80年代已被淘汰;混合式步进是指混合了永磁式和反应式的优点。它又分为两相和五相:两相步进角一般为1.8度而五相步进角一般为 0.72度。这种步进电机的应用最为广泛。 1.3 步进电机的特点 1.精度高一般的步进电机的精度为步进角的3-5%,且不累积。可在宽广的频率范围内通过改变脉冲频率来实现调速,快速起停、正反转控制及制动等,这是步进电动机最突出的优点 2.过载性好其转速不受负载大小的影响,不像普通电机,当负载加大时就会出现速度下降的情况,所以步进电机使用在对速度和位置都有严格要求的场合; 3.控制方便步进电机是以“步”为单位旋转的,数字特征比较明显,这样就给计算
编号: 综合智能电子 实训 (论文)说明书题目: 院(系):使用科技学院 专业:电子信息工程 学生姓名: 学号: 指导教师: 2010年 1 月 6 日
目录 引言 第1章简介 1.1 步进电机 第2章步进电机原理 2.1 步进电机的工作原理 2.1.1结构及基本原理 2.1.2 电机的步进顺序 第3章系统的硬件设计 3.1 系统设计方案 3.2 主从机硬件部件介绍 3.2.1A T89S51简介 3.2.2 TGI2864E简介 3.2.3MAX485 串行通信 3.2.4TIP122 3.2.5 MOC70T2 3.3 LCD显示电路设计 3.4 电机驱动模块设计 第4章系统的软件实现 4.1 系统软件主流程图 4.2 系统初始化流程图 4.3 部分子程序 第五章总结 致谢 参考文献 摘要:本文使用单片机、步进电机驱动芯片、字符型LCD和键盘阵列,构建了集步进电机控制器和驱动器为一体的步进电机控制系统。二维工作台作为被控对象通过步进电机驱动滚珠丝杆在X/Y轴方向联动。文中讨论了一种以最少参数确定一条圆弧轨迹的插补方法和步进电机变频调速的方法。步进电机控制系统的开发采用了软硬件协同仿真的方法,可以有效地减少系统开发的周期和成本。最后给出了步进电机控制系统的使用实例。
关键词:步进电机控制系统,插补算法,变频调速,软硬件协同仿真 In this paper, microcontroller, stepper motor driver chips, character LCD and keypad array, build a set of stepper motor controller and driver as one of the stepping motor control system. Two-dimensional table as a charged object by stepper motor drive ball screw in X / Y axis linkage. This paper discusses a minimum of parameters to determine the trajectory of a circular interpolation method and the method of frequency control stepper motor. Stepper motor control system has been developed using the software and hardware co-simulation method, can effectively reduce the system development cycle and cost. Finally, the stepper motor control system application examples.
单片机原理及系统课程设计 1 引言 步进电机又称为脉冲电动机或阶跃电动机,它是基于最基本的电磁感应作用,将电脉冲信号转变为角位移或线位移的开环控制元件。单片机控制的步进电机广泛地应用于工业自动控制、数控机床、组合机床、机器人、计算机外围设备、照相机,大型望远镜,卫星天线定位系统等等。 随着经济的发展,技术的进步和电子技术的发展,步进电机的应用领域更加广阔,同时也对步进电机的运行性能提出了更高的要求。 步进电机的原始模型起源于1830年至1860年,1870年前后开始以控制为目的的尝试,应用于氩弧灯的电极输送机构中,这被认为最早的步进电机。 1950年后期晶体管的发明也逐渐应用在步进电机上,对于数字化的控制变得更为容易。到20世纪60年代后期,在步进电机本体方面随着永磁材料的发展,各种实用性步进电机应运而生。步进电机往后经过不断改良,使得今日步进电机已广泛运用在需要高定位精度、高分解能、高响应性、信赖性等灵活控制性高的机械系统中。 在生产过程中要求自动化、省人力、效率高的机器中,我们很容易发现步进电机的踪迹,尤其以重视速度、位置控制、需要精确操作各项指令动作的灵活控制性场合步进电机用得最多。
2 设计方案与原理 4.1 设计方案 设计一个51单片机四相步进电机控制系统要求系统具有如下功能: (1)由I/O口产生的时序方波作为电机控制信号; (2)信号经过驱动芯片驱动电机的运转; (3)电机的状态通过键盘控制,包括正转,反转,加速,减速,停止和单步运行。 4.2 设计原理 步进电机实际上是一个数字\角度转换器,也是一个串行的数\模转换器。步进电机的基本控制包括启停控制、转向控制、速度控制、换向控制4个方面。从结构上看,步进电机分为三相、四相、五相等类型,本次设计的是四相电机。四相步进电机的工作方式有单四拍、双四拍和单双八拍三种。 在本次设计中,我们使用的是四相单八拍的工作方式。通过P1口给A,B,C,D四相依次输出高电平即可实现步进电机的旋转,通过控制两次输出的间隔,即可实现对步进电机的速度控制。 图 2.1 步进电机内部结构截图 根据步进电机的相关相序表我们可以正常的控制电机的步进运行。
#include "reg52.h" #include "INTRINS.H" #include
基于单片机的步进电机控制器毕业设计论文 目录 第1章绪论 (3) 1.1引言 (3) 1.2步进电机常见的控制方案与驱动技术简介 (5) 1.2.1常见的步进电机控制方案 (5) 1.2.2步进电机驱动技术 (7) 1.3本文研究的内容 (9) 第2章步进电机概述 (10) 2.1步进电机的分类 (10) 2.2步进电机的工作原理 (11) 2.2.1结构及基本原理 (11) 2.2.2两相电机的步进顺序 (11) 2.3 步进电机的工作特点 (14) 2.4本章小结 (16) 第3章系统的硬件设计 (17) 3.1系统设计方案 (17) 3.1.1系统的方案简述与设计要求 (17) 3.1.2系统的组成及其对应功能简述 (17) 3.2单片机最小系统 (19) 1
3.2.1AT89S51简介 (19) 3.2.2单片机最小系统设计 (24) 3.2.3单片机端口分配及功能 (25) 3.3串口通信模块 (25) 3.4数码管显示电路设计 (26) 3.4.1共阳数码管简介 (26) 3.4.2共阳数码管电路图 (27) 3.5电机驱动模块设计 (28) 3.5.1L298简介 (28) 3.5.2电机驱动电路设计 (29) 3.6驱动电流检测模块设计 (31) 3.6.1OP07芯片简介 (31) 3.6.2ADC0804芯片简介 (33) 3.6.3电流检测模块电路图 (36) 3.7独立按键电路设计 (37) 3.8本章小结 (37) 第4章系统的软件实现 (38) 4.1系统软件主流程图 (38) 4.2系统初始化流程图 (39) 4.3按键子程序 (40) 结论 (44) 2
基于单片机的步进电机驱动控制 一、步进电机概述 1.步进电机的定义 步进电机指的是以数字脉冲信号作为电机线或教位移的控制信号,并以数字脉冲频率对电机的转速进行控制的动力控制系统。 在负载正常范围的情况下,步进电机的运行状态只和数字脉冲发生器提供的信号的频率和脉冲占空比有关,一般情况下,电机的状态不受负载的影响。电机的运行角度只和每次所给予的脉冲信号强度有关,而电机的运行速度也只和脉冲信号的频率有直接关 系。这种采用弱点控制强电的控制方式使得步进电机在速度、位移等控制领域有着普通电机不能比拟的优势。 2.驱动控制系统框图 步进电机控制系统有着精确控制、运行稳定的特性,这一其他电机不能比拟的优势使得步进电机得到了广泛的应用。而一般对步进电机控制系统的驱动必须要包含脉冲信 号发生部分,功放部分和驱动控制部分等几个模块电路,我们根据这些通过的模块电路,可将步进电机控制系统的通用框图绘制如下: 在上图的步进电机驱动控制系统方框图中,控制步进电机运行状态的脉冲信号一 般由集成芯片产生,可以是单片机、等智能芯片,也可以是一般的数字电路集成芯片。信号分配环节则要根据步进电机的型号来选择,如四相步进电机有四相四拍和四相 八拍种信号分配的方式;两相步进电机有两相四拍和八拍等脉冲加载形式。功放部分 在驱动环节上显得尤为重要。动态平均电流是步进电机转矩大小的决定因素,前提条件 是电机的速度。电机力矩与平均电流成正比,驱动系统对电机的反电势消弱越多,则平 均电流就越大。 我们一般可以用恒压和恒压串电阻的方法来驱动,或者在条件允许的情况下我们可以用高低压驱动、恒流和细分数等方法来驱动实际的应用过程种,多采用数字集成驱 动芯片作为步进电机的驱动手段。 二、现阶段国内外步进电机驱动的常用方式 1.变频器控制方式 使用变频器对步进电机进行驱动控制时,可以很好的解决步进电机在启动和停止时 容易失步的问题,提高了系统的控制精度。但是变频器的应用成本较高,结构和操作也 比较复杂,无形中提高步进电机的控制难度。 2.PLC控制方式 使用ABB、西门子、欧姆龙等国际知名生产制造商研发的系列产品可以 实现对步进电机的理想化控制,但是基于核心的步进电机控制系统成本高昂,且 难以实现精确控制,在本系统中不太适合。 3.单片机控制方式 随着嵌入式系统在工业控制领域中的广泛应用,以单片机特别是系列单片机 作为控制核心的步进电机控制电路在生产生活领域得到了普及,单片机有着大规模数字
重庆科技大学 本科毕业论文 基于AT89C51单片机的步进电动机控制系统 设计 考生姓名: XXXXX X 准考证号: XXXXXXXXXXXX 专业层次:本科院(系):XXXXXXXXXXXXXXXXXXX 指导教师: XXXXXX 职称:讲师 重庆科技大学 二O一二年月日
基于AT89C51单片机的步进电动机控制系统 设计 考生姓名: XXXXXX 准考证号: XXXXXXXXXXXX 专业层次:本科 指导教师: XXXXXXX 院(系):机械与动力工程学院 重庆科技大学 二O一二年九月二十日
摘要 随着微电子和计算机技术的发展,步进电机的需求量与日俱增,它广泛用于打印机、电动玩具等消费类产品以及数控机床、工业机器人、医疗器械等机电产品中,其在各个国民经济领域都有应用。研究步进电机的控制系统,对提高控制精度和响应速度、节约能源等都具有重要意义。 步进电机是一种能将电脉冲信号转换成角位移或线位移的机电元件,步进电机控制系统主要由步进控制器,功率放大器及步进电机等组成。采用单片机控制,用软件代替上述步进控制器,使得线路简单,成本低,可靠性大大增加。软件编程可灵活产生不同类型步进电机励磁序列来控制各种步进电机的运行方式。 本设计是采用AT89C51单片机对步进电机的控制,通过I/O口输出的时序方波作为步进电机的控制信号,信号经过芯片ULN2003驱动步进电机。 实践证明,基于单片机控制的步进电机比传统的步进控制器具有更好的性能,更加简单、方便、可靠。本设计的主要研究对象就是开环伺服系统中最常用的执行器件——步进电机。 关键词:步进电机,单片机,正反转控制,键盘控制,LCD液晶显示
51单片机控制四相步进电机 2009年07月21日星期二 12:44 51单片机控制四相步进电机 2009-03-01 18:53 接触单片机快两年了,不过只是非常业余的兴趣,实践却不多,到现在还算是个初学者吧。这几天给自己的任务就是搞定步进电机的单片机控制。以前曾看过有关步进电机原理和控制的资料,毕竟自己没有做过,对其具体原理还不是很清楚。今天从淘宝网买了一个EPSON的UMX-1型步进电机,此步进电机为双极性四相,接线共有六根,外形如下 图所示: 详细内容: https://www.doczj.com/doc/9211364645.html,/31907887_d.h tml
拿到步进电机,根据以前看书对四相步进电机的了解,我对它进行了初步的测试,就是将5伏电源的正端接上最边上两根褐色的线,然后用5伏电源的地线分别和另外四根线(红、兰、白、橙)依次接触,发现每接触一下,步进电机便转动一个角度,来回五次,电机刚好转一圈,说明此步进电机的步进角度为360/(4×5)=18度。地线与四线接触的顺序相反,电机的转向也相反。 如果用单片机来控制此步进电机,则只需分别依次给四线一定时间的脉冲电流,电机便可连续转动起来。通过改变脉冲电流的时间间隔,就可以实现对转速的控制;通过改变给四
线脉冲电流的顺序,则可实现对转向的控制。所以,设计了如下电路图: C51程序代码为: 代码一 #include
基于单片机的步进电机毕业设计 目录 前言 (1) 第1章步进电机工作原理 (2) 1.1 步进电机的分类 (2) 1.2 步进电机的各项参数指标 (3) 1.3 步进电机控制系统组成 (5) 1.4 步进电机工作原理 (6) 第2章步进电机硬件设计 (8) 2.1 控制方案的确定 (8) 2.2 所用芯片的选择 (8) 2.2.1 CPU选择 (8) 2.2.2 地址锁存器 (10) 2.2.3 I/O扩展 (10) 2.2.4 显示接口 (12) 2.2.5 数据存储器扩展 (12) 2.2.6 程序存储器扩展 (13) 2.3 单片机控制步进电机硬件原理图 (14) 第3章软件设计 (15) 3.1 主程序流程 (15) 3.2 升降频子程序流程 (16) 3.3 走一步子程序流程 (17) 3.4 系统运行程序及分析 (18) 结论 (28) 谢辞 (29) 参考文献 (30) 附录 (31) 外文资料翻译 (32)
前言 步进电动机已成为除直流电动机和交流电动机以外的第三类电动机。传统电动机作为机电能量转换装置,在人类的生产和生活进入电气化过程中起着关键的作用。可是在人类社会进入自动化时代的今天,传统电动机的功能已不能满足工厂自动化和办公自动化等各种运动控制系统的要求。为适应这些要求,发展了一系列新的具备控制功能的电动机系统,其中都有自己的特点,应用最为广泛的一类便是步进电动机。 步进电动机的发展与计算机工业密切相关。自从步进电动机在计算机外围设备中取代小型直流电动机以后,使其设备的性能提高,很快地促进了步进电动机的发展。另一方面,微型计算机和数字控制技术的发展,又将作为数控系统执行部件的步进电动机推广应用到其他领域,如电加工机床、小功率机械加工机床、测量仪器、光学和医疗仪器以及包装机械等。 现在比较常用的步进电机包括反应式步进电机、永磁式步进电机、混合式步进电机等。其中反应式步进电机的转子磁路由软磁材料制成,定子上有多相励磁绕组,利用磁导的变化产生转矩。现阶段,反应式步进电机获得最多的应用。 本文第一章系统介绍了步进电机的分类,结构,以及它的工作原理。第二章着重介绍了本系统的硬件控制方案,对用到的外围芯片做了简单的介绍。第三章给出了整个系统的运行流程,以及重要子系统的流程,最终编写了完整的运行程序。
#include
TL0 = 0x0C; //设定时每隔0.5ms中断一次TR0 = 1; //开始计数 turn = 0; speedlevel = 2; delay(10000); speedlevel = 1; do{ speedlevel = 2; delay(10000); speedlevel = 1; delay(10000); stop_flag=1; delay(10000); stop_flag=0; }while(1); } //定时器0中断处理 void timeint(void) interrupt 1 { TH0=0xFE; TL0=0x0C; //设定时每隔0.5ms中断一次count++; spcount--; if(spcount<=0) { spcount = speedlevel; gorun(); } } void delay(unsigned int endcount) { count=0; do{}while(count 基于51单片机的步进电机控制 [摘要]本课程设计的内容是利用51单片机,达到控制步进电机的启动、 停止、正转、反转、两档速度和状态显示的目的,使步进电机控制更加灵活。步进电机驱动芯片采用ULN2803,ULN2803具有大电流、高电压,外电路简单等优点。利用四位数码管增设电机状态显示功能,各项数据更直观。实测结果表明,该控制系统达到了设计的要求。 关键字:步进电机、数码管、51单片机、ULN2803 一步进电机与驱动电路 1.1 什么是步进电机 步进电机是一种将电脉冲转化为角位移的执行机构。通俗一点讲:当步进驱动器接收到一个脉冲信号,它就驱动步进电机按设定的方向转动一个固定的角度(及步进角)。可以通过控制脉冲个数来控制角位移量,从而达到准确定位的目的;同时也可以通过控制脉冲频率来控制电机转动的速度和加速度,从而达到调速的目的。 1.2 步进电机的种类 步进电机分永磁式(PM)、反应式(VR)、和混合式(HB)三种。永磁式步进一般为两相,转矩和体积较小,步进角一般为7.5度或15度;反应式步进一般为三相,可实现大转矩输出,步进角一般为1.5度,但噪声和振动都很大。在欧美等发达国家80年代已被淘汰;混合式步进是指混合了永磁式和反应式的优点。它又分为两相和五相:两相步进角一般为1.8度而五相步进角一般为0.72度。这种步进电机的应用最为广泛。 1.3 步进电机的特点 1.精度高一般的步进电机的精度为步进角的3-5%,且不累积。可在宽广的频率范围内通过改变脉冲频率来实现调速,快速起停、正反转控制及制动等,这是步进电动机最突出的优点 2.过载性好其转速不受负载大小的影响,不像普通电机,当负载加大时就会出现速度下降的情况,所以步进电机使用在对速度和位置都有严格要求的场合; 3.控制方便步进电机是以“步”为单位旋转的,数字特征比较明显,这样就给计算机控制带来了很大的方便,反过来,计算机的出现也为步进电机开辟了更为广阔的使用市场; 课程设计报告 题目单片机控制步进电机 课程名称单片机原理及接口技术 院部名称 专业自动化 班级M10自动化 学生姓名 学号 课程设计地点 课程设计学时 指导教师高峰 金陵科技学院教务处制 【注:根据课程设计大纲第四项具体要求撰写课程设计报告】 目录 1设计任务和要求 (3) 2设计思路 (4) 3系统硬件设计 (5) 3.1 硬件电路的工作原理 (5) 3.2步进电机模块 (5) 3.3控制模块 (6) 3.4主要元件介绍: (6) 4软件编程 (11) 5 调试过程与结果 (20) 5.1正转结果显示: (20) 5.1.1正转加速: (21) 5.1.2正转减速: (21) 6 总结与体会 (24) 7 参考资料 (26) 8 附录 (26) 1设计任务和要求 单片机课程设计是考察学生利用所学过的专业知识,进行综合的电机控制系统设计并最终完成实际系统连接,能够使学生对电气与自动化的专业知识进行综合应用,培养学生的创新能力和团队协作能力,提高学生的动手实践能力。最终形成一篇符合规范的设计说明书,并参加综合实践答辩,为后期的毕业设计做好准备。 本次设计考核的能力主要有: 1)专业知识应用能力,包括电路分析、电子技术、单片机、检测技术、电 气控制、电机与拖动、微特电机及其驱动、计算机高级语言、计算机辅 助设计、计算机办公软件等课程,还包括本专业的拓展性课程如变频器、组态技术、现场总线技术、伺服电机等课程。 2)项目设计与运作能力,团队协作能力,技术文档撰写能力,PPT汇报与 口头表达能力。 3)电气与自动化系统的设计与实际应用能力。 要求完成的工作量包括: 1)现场仿真演示效果。 2)学生结合课题进行PPT演讲与答辩。 3)学生上交课题要求的各类设计技术文档。 用单片机控制步进电机 步进电机是机电控制中一种常用的执行机构,它的用途是将电脉冲转化为角位移,通俗地说:当步进驱动器接收到一个脉冲信号,它就驱动步进电机按设定的方向转动一个固定的角度(及步进角)。通过控制脉冲个数即可以控制角位移量,从而达到准确定位的目的;同时通过控制脉冲频率来控制电机转动的速度和加速度,从而达到调速的目的。 一、步进电机常识 常见的步进电机分三种:永磁式(PM),反应式(VR)和混合式(HB),永磁式步进一般为两相,转矩和体积较小,步进角一般为7.5度或15度;反应式步进一般为三相,可实现大转矩输出,步进角一般为1.5度,但噪声和振动都很大。在欧美等发达国家80年代已被淘汰;混合式步进是指混合了永磁式和反应式的优点。它又分为两相和五相:两相步进角一般为1.8度而五相步进角一般为 0.72度。这种步进电机的应用最为广泛。 二、永磁式步进电机的控制 下面以电子爱好者业余制作中常用的永磁式步进电机为例,来介绍如何用单片机控制步进电机。 图1是35BY型永磁步进电机的外形图,图2是该电机的接线图,从图中可以看出,电机共有四组线圈,四组线圈的一个端点连在一起引出,这样一共有5根引出线。要使用步进电机转动,只要轮流给各引出端通电即可。将COM端标识为C,只要AC、 C、BC、 C,轮流加电就能驱动步进电机运转,加电的方式可以有多种,如果将COM端接正电源,那么只要用开关元件(如三极管),将A、、B、轮流接地。 下表列出了该电机的一些典型参数: 表1 35BY48S03型步机电机参数 型号步距角相数电压电流电阻最大静转距定位转距转动惯量 35BY48S03 7.5 4 12 0.26 47 180 65 2.5 有了这些参数,不难设计出控制电路,因其工作电压为12V,最大电流为0.26A,因此用一块开路输出达林顿驱动器(ULN2003)来作为驱动,通过P1.4~P1.7来控制各线圈的接通与切断,电路如图3所示。开机时,P1.4~P1.7均为高电平,依次将P1.4~P1.7切换为低电平即可驱动步进电机运行,注意在切换之前将前一个输出引脚变为高电平。如果要改变电机的 2012届毕业生毕业设计说明书 题目:基于单片机的步进电机的控制器设计 院系名称:信息科学与工程学院 专业班级:电子信息科学与技术 学生姓名:学号: 指导教师:教师职称: 2012年月日 毕业设计中文摘要 摘要 步进电机控制方式的实现有多种,可以采用电子电路控制,PLC控制和单片机控制的方式。近些年来随着科技的飞速发展,单片机的应用正在不断深入,同时带动传统控制检测的更新,用单片机控制步进电机显得更加灵活和方便。本设计是用AT89C52单片机作为核心部件进行逻辑控制及信号产生,用单片机技术和C语言编程设计来进行步进电机的控制。通过人手动按开关实现步进电机的启动与停止。此外此系统还添加了步进电机的正转反转,加速及减速,屏幕显示功能。同时本文也通过了proteus软件的仿真,在仿真结果过能看出近似真实的效果。 关键词:步进电机单片机控制 AT89C52 proteus仿真 毕业设计外文摘要 Title The design of the control system of Step—motor Abstract Stepper motor control can be achieved in different ways, can be used early analog circuits, digital circuits or a combination of analog and digital circuit means. With the rapid development of science and technology in recent years, the application of SCM is a growing, while traditional control test drive rapid updates. This paper describes a core component of the AT89C52, as the signal generated by logic control and microcontroller technology and assembly language programming designed stepper motor control system, Start and stop of the stepping motor to handle the switch manually by people. In addition, this system also adds a stepper motor forward reverse, acceleration and deceleration, the screen display. Meanwhile, through software simulation in proteus, too can be seen that the approximation of the true effect of the simulation results. Keywords stepper motor microcontroller AT89C52 proteus simulation基于51单片机的步进电机控制-
单片机课程设计-单片机控制步进电机
用单片机控制步进电机
基于单片机AT89C52的步进电机的控制器设计
相关主题
文本预览