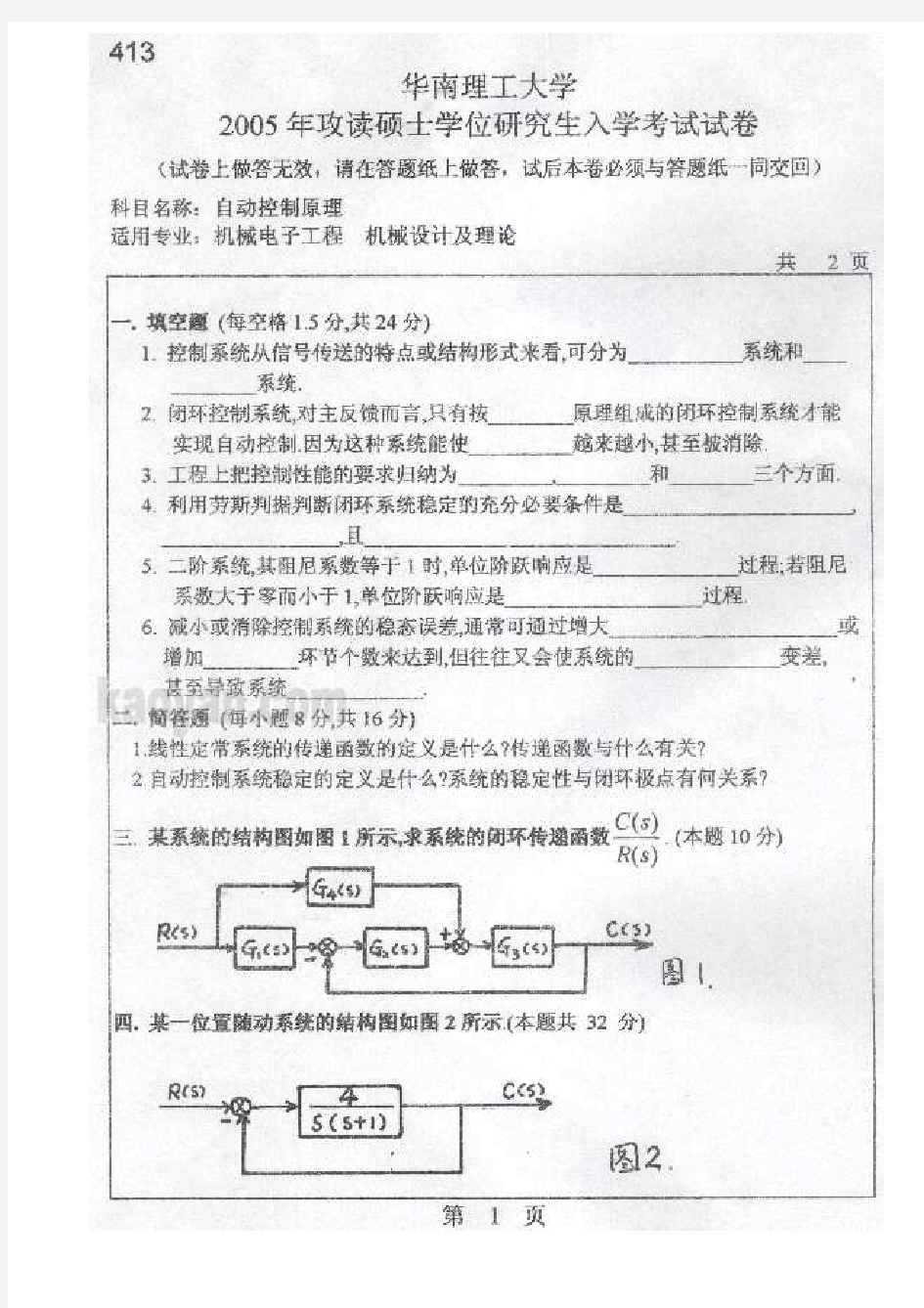
自动控制原理作业 1.试将下列系统的结构图化简(本题10分) (说明:本题考查对第二章第三节系统结构图化简及等效变换的掌握程度,该类题目有两种求解方法。第一种求解方法可参见课本44~47页的例题2-11、2-12、2-13等。第二种方法可利用46页公式2-82,两种方法结果一样。)
2. 已知单位负反馈系统的开环传递函数如下,试确定使系统稳定的开环放大系数K 的取值范围。(本题10分) ()(1)(4) K K G s s s s =++ (说明:本题考查对 第三章第一节 劳斯稳定判据的理解和应用,可参见课本67页例题3-6。一样的求解思路) 3.已知单位负反馈系统开环传递函数210()+(s 2) = G s s 。(本题20分) 1)试判断该系统属于几型系统。 2)系统的开环放大系数K 是多少? 3)试判断该系统是否稳定。 4)试求在输入信号2()5=r t t 作用下,系统的稳态误差是多少。 (说明:本题考查对第三章第六节 稳态误差相关知识的理解和计算。可参见课
本105页表3-6的总结及例题3-16。) 4. 某单位负反馈系统的开环传递函数如下,试求解以下性能指标:峰值时间p t ,调解时间s t ,超调量%σ。(本题15分) () 10() 3.16G s s s =+
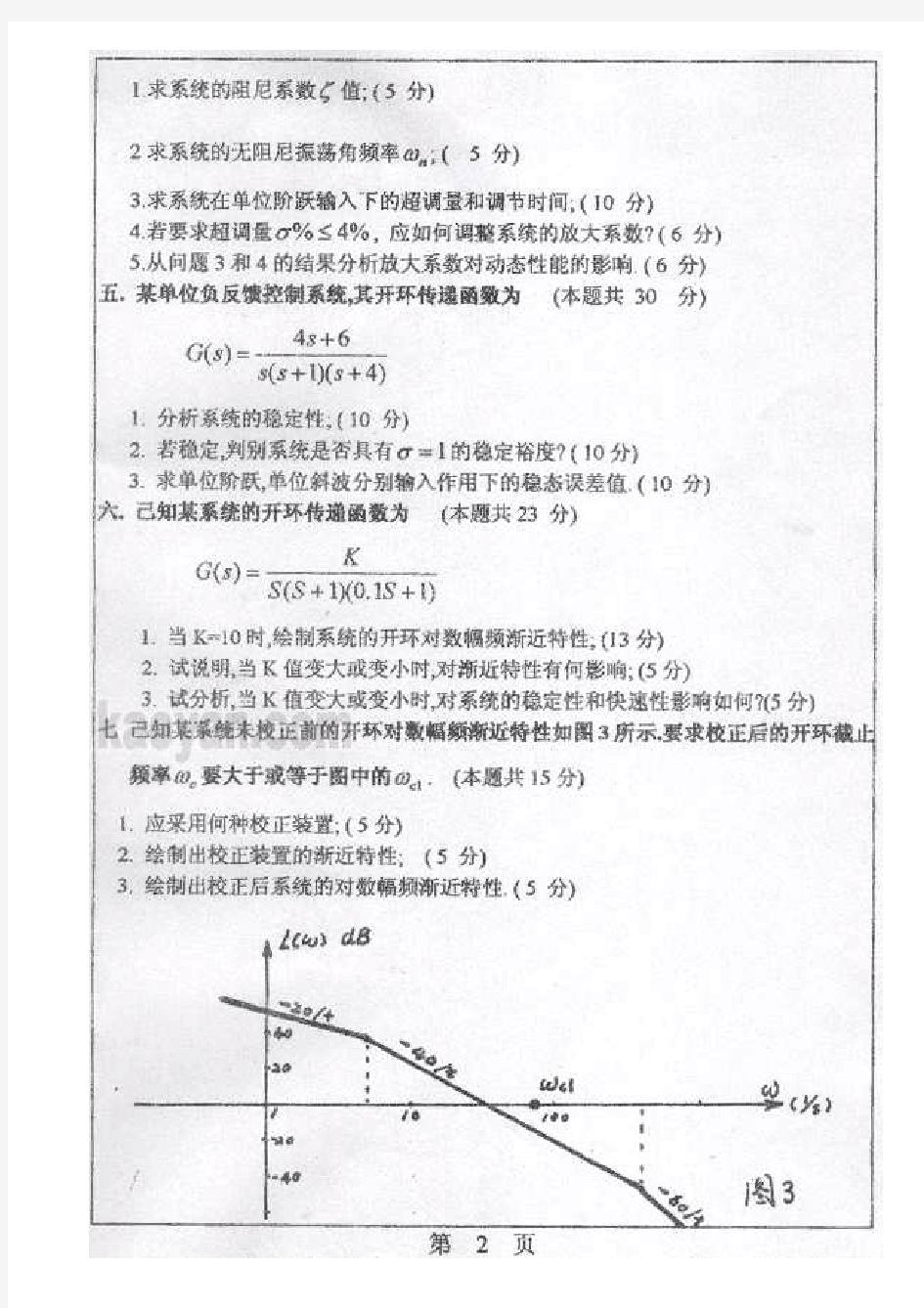
5. 已知某系统的开环传递函数10()(21)(81) k G s s s =++,试绘制系统的对数幅频特性图,要求画图标明转折频率及斜率变化,必过点等必要数据,给出必要的计算过程与说明。(本题15分) (说明:本题考查对 第五章第四节 系统开环频率特性的绘制要点,可参见课本213~217页,对绘制步骤有详细的说明,绘制要点是确定低频渐近线斜率、转折频率、及转折后斜率的变化量。可参看课本作业题5-8。一样的求解思路) 6. 已知系统的开环传递函数()(1)(5)g k K G s s s s = ++,绘制该系统的根轨迹。(本题10 分) (说明:本题考查对 第四章第二节 系统根轨迹的绘制要点的理解,可参见课本141~155页的内容和例题4-4,4-14等。)
华南理工大学实验报告集团文件版本号:(M928-T898-M248-WU2669-I2896-DQ586-M1988)
实验报告课程名称:计算机组成与体系结构 学生姓名:张璐鹏 学生学号: 学生专业:网络工程 开课学期: 2017年10月
实验一运算器组成实验 地点:楼 房; 实验台号: 实验日期与时 间: 评分: 预习检查纪录:实验教师: 一、实验目的 1.熟悉双端口通用寄存器堆的读写操作。 2.熟悉简单运算器的数据传送通路。 3.验证运算器74LS181的算术逻辑功能。 4.按给定数据,完成指定的算术、逻辑运算。 二、实验电路 图3.1示出了本实验所用的运算器数据通路图。参与运算的数据首先通过实验台操作板上的八个二进制数据开关SW7-SW0来设置,然后输入到双端口通用寄存器堆RF中。 RF(U54)由一个ispLSI1016实现,功能上相当于四个8位通用寄存器,用于保存参与运算的数据,运算后的结果也要送到RF中保存。双端口寄存器堆模块的控制信号中,RS1、RS0用于选择从B端口(右端口)读出的通用寄存器,RD1、RD0用于选择从A端口(左端口)读出的通用寄存器。而WR1、WR0用于选择写入的通用寄存器。LDRi是写入控制信号,当LDRi=1时,数据总线DBUS上的数据在T3写入由WR1、WR0指定的通用寄存器。RF的A、B端口分别与操作数暂存器DR1、DR2相连;另
外,RF的B端口通过一个三态门连接到数据总线DBUS上,因而RF中的 数据可以直接通过B端口送到DBUS上。 DR1(U47)和DR2(U48)各由1片74LS273构成,用于暂存参与运算的数据。DR1接ALU的A输入端口,DR2接ALU的B输入端口。ALU(U31、U35)由两片74LS181构成,ALU的输出通过一个三态门(74LS244)发送到数 据总线DBUS上。 实验台上的八个发光二极管DBUS7-DBUS0显示灯接在DBUS上,可以 显示输入数据或运算结果。另有一个指示灯C显示运算器进位标志信号 状态。 图中尾巴上带粗短线标记的信号都是控制信号,其中S3、S2、S1、 S0、M、Cn#、LDDR1、LDDR2、ALU_BUS#、SW_BUS#、LDRi、RS1、RS0、 RD1、RD0、WR1、WR0都是电位信号,在本次实验中用拨动开关K0—K15 来模拟;T2、T3为时序脉冲信号,印制板上已连接到实验台的时序电 路。实验中进行单拍操作,每次只产生一组T1、T2、T3、T4时序脉冲,需将实验台上的DP、DB开关进行正确设置。将DP开关置1,DB开关置0,每按一次QD按钮,则顺序产生T1、T2、T3、T4一组单脉冲。 三、实验设备 1.TEC-5计算机组成实验系统1台 2.逻辑测试笔一支(在TEC-5实验台上) 3.双踪示波器一台(公用) 4.万用表一只(公用) 四、实验任务
A.比较元件 B.给定元件 C. 反馈元件 D.放大元件 第一章 自动控制的一般概念 1. 如果被调量随着给定量的变化而变化,这种控制系统叫( ) A. 恒值调节系统 B.随动系统 C. 连续控制系统 D.数字控制系 统 2. 主要用于产生输入信号的元件称为( ) 3. 与开环控制系统相比较,闭环控制系统通常对( )进行直接或间接地测量,通过反馈 环节去影响控制信号。 A.输出量 B. 输入量 C. 扰动量 D . "r 亘. 设定量 4. 直接对控制对象进行操作的元件称为( ) A.给定兀件 B. 放大兀件 C. 比较兀件 D . 执行兀件 5. 对于代表两个或两个以上输入信号进行 ( )的元件又称比较器。 A.微分 B. 相乘 C. 加减 D. 相除 6. 开环控制系统的的特征是没有( ) A.执行环节 B. 给定环节 C. 反馈环节 D . . 放大环节 7. 主要用来产生偏差的兀件称为( ) A.比较兀件 B. 给疋兀件 C. 反馈兀件 D . 放大兀件 8. 某系统的传递函数是 G s _ 1 2s +1 s e , 则该可看成由( ) 环节串联而成。 A.比例.延时 B. 惯性.导前 C. 惯性.延时 D. 惯性.比例 10 . 在信号流图中,在支路上标明的是( ) A.输入 B. 引出点 C. 比较点 D. 传递函数 11. 采用负反馈形式连接后,贝U () A. 一定能使闭环系统稳定; B. 系统动态性能一定会提高; C. 一定能使干扰引起的误差逐渐减小,最后完全消除; D. 需要调整系统的结构参数,才能改善系统性能。
813自动控制原理考试大纲 硕士研究生招生考试《自动控制原理》考试大纲 813考试科目代码:机械设计及理论适用招生专业:机械电子工程机械制造及其自动化特别提示:需带无储存功能的计算器 一、考试内容自动控制的一般概念1.理解对控制性能的基掌握自动控制系统的一般概念,,重点是开环控制和闭环控制的概念了解各种典型控制系统的工作原理及控制理论的发展过程。本要求,自动控制系统的数学模型2.理解传递函数的定义和了解微分方程一般建立方法,掌握控制系统的数学模型的基本概念,典型环节掌握动态结构图的建立和化简规则。传递函数的定义和性质知识点为:,性质,自动控制系统的传递函数。,动态结构图的建立,动态结构图的化简的传递函数, 自动控制系统的时域分析方法3.能够用该方法分析控制系统的各种了解和掌握经典控制理论最基本的方法之一,时域分析法一阶。典型控制过程及性能指标知识点为:,包括稳定性控制性能(,)快速性和稳态精度稳态误差分析。,高阶系统的低阶化,稳定性与代数判据,系统分析,二阶系统分析自动控制系统的频域分析方法4.并能通过频率特性分析控制,要求掌握各种系统和环节的幅相频率特性和对数频率特性的画法典型环节的频率特性,系统开环频率特性,乃奎斯特稳定判据及系统的控制性能。知识点为:对数稳定判据,稳定裕度及计算,系统闭环频率特性。自动控制系统的校正装置综合5. 对控制性能的改进就涉及到系统的校正。要求在在对控制系统的控制性能进行分析的基础上, 前置校正有较为全面的理,反馈校正建立控制系统校正的一般概念的基础上,,对串联校正控制系统校正的概念,串联校正、反馈校正和前解。掌握频率法校正的一般方法。知识点为:置校正在校正中的应用。分计)150二、考试题型(分值,按分)251、填空(分)简答题(152、分)、计算及分析题(803 分)30综合应用题(、4.
网络工程与网络管理作业 第1章网络工程概述 1.1网络系统集成的步骤包括:【D】。 A.网络系统规划B.网络系统设计 C.网络系统实施D.以上都是 1.2网络系统集成的任务包括: 答:网络系统集成即是在网络工程中根据应用的需要,运用系统集成方法,将硬件设备,软件设备,网络基础设施,网络设备,网络系统软件,网络基础服务系统,应用软件等组织成为一体,使之成为能组建一个完整、可靠、经济、安全、高效的计算机网络系统的全过程。从技术角度来看,网络系统集成是将计算机技术、网络技术、控制技术、通信技术、应用系统开发技术、建筑装修等技术综合运用到网络工程中的一门综合技术。一般包括:1、前期方案2、线路、弱电等施工3、网络设备架设4、各种系统架设5、网络后期维护。 1.3什么是集成、系统集成、网络系统集成? 答:集成是把各个独立部分组合成具有全新功能的、高效和统一的整体的过程。 系统集成是指在系统工程学指导下,提出系统的解决方案,将部件或子系统综合集成,形成一个满足设计要求的自治整体的过程。 网络系统集成就是采用系统集成的方法,建设高效、高性价比的计算机网络。 第2章网络工程理论与技术 2.1下列协议中属于TCP/IP协议参考模型运输层(TCP层)的是:【D】。 A.HTTP B.FTP C.ARP D.UDP 2.2计算机网络中有四种地址,这些地址包括域名地址、端口地址、IP地址、MAC地址,其中对应于网络体系协议层次的网络层的地址是:【C】。
A.端口地址B.域名地址 C.IP地址D.MAC地址 2.3 VLAN主干(trunk)连接采用的标准是:【B】。 A.IEEE 802.3标准B.IEEE 802.1Q标准 C.IEEE 802.2标准D.IEEE 802.1A标准 2.4写出专用(私有)IP地址的用途,以及专用(私有)IP地址的地址范围。 答:为了组建Intranet(也称为内联网、企业网)的方便,因特网名字与号码指派公司(ICANN)规定了在Intranet内可以使用的IP地址的三个地址范围,称为专用IP地址,有时也称为私有IP地址,用于组建Intranet网络时,在内网对IP地址分配和使用。专用IP地址公可以在内部网络中使用,若要访问外网,需要通过网络地址转换(NAT)。专用(私有)IP地址的地址范围: A类地址范围10.0.0.0~10.255.255.255,一个A类地址10. B类地址范围172.16.0.0~172.31.2555.255,16个B类地址172.16~172.31。 C类地址范围192.168.0.0~192.168.255.255,256个C类地址192.168.0~192.168.255。 2.5列表说明IEEE802.3系列组网技术标准。 答: 技术标准以太网类型传输速率(Mbps)拓扑结构最大网段长度(m)传输介质 IEEE 802.3 10Base-5 10 总线500 50Ω粗同轴电缆IEEE 802.3a 10Base-2 10 总线185 50Ω粗同轴电缆IEEE 802.3b 10Base-36 10 总线1800 75Ω同轴电缆IEEE 802.3c 1Base-5 1 星型250 2对3类UTP IEEE 802.3I 10Base-T 10 星型100 2对3类UTP IEEE 802.3i 10Base-F 10 星型2000 多模或单模光纤 IEEE 802.3u 100Base-TX 100 星型 100 2对5类UTP 100Base-T4 100 4对3类UTP 100Base-FX 2000 多模或单模光纤 IEEE 802.3z 1000Base-CX 1000 星型25 STP(屏蔽双绞线) 1000Base-SX 1000 星型500 多模光纤 1000Base-LX 1000 星型550 3000 多模光纤 IEEE 802.3ab 1000Base-T 1000 星型100 4对超5类UTP
自动控制原理选择题(48学时) 1.开环控制方式是按 进行控制的,反馈控制方式是按 进行控制的。 (A )偏差;给定量 (B )给定量;偏差 (C )给定量;扰动 (D )扰动;给定量 ( ) 2.自动控制系统的 是系统正常工作的先决条件。 (A )稳定性 (B )动态特性 (C )稳态特性 (D )精确度 ( ) 3.系统的微分方程为 222 )()(5)(dt t r d t t r t c ++=,则系统属于 。 (A )离散系统 (B )线性定常系统 (C )线性时变系统 (D )非线性系统 ( ) 4.系统的微分方程为)()(8)(6)(3)(2233t r t c dt t dc dt t c d dt t c d =+++,则系统属于 。 (A )离散系统 (B )线性定常系统 (C )线性时变系统 (D )非线性系统 ( ) 5.系统的微分方程为()()()()3dc t dr t t c t r t dt dt +=+,则系统属于 。 (A )离散系统 (B )线性定常系统 (C )线性时变系统 (D )非线性系统 ( ) 6.系统的微分方程为()()cos 5c t r t t ω=+,则系统属于 。 (A )离散系统 (B )线性定常系统 (C )线性时变系统 (D )非线性系统 ( ) 7.系统的微分方程为 ττd r dt t dr t r t c t ?∞-++=)(5)(6 )(3)(,则系统属于 。 (A )离散系统 (B )线性定常系统 (C )线性时变系统 (D )非线性系统 ( ) 8.系统的微分方程为 )()(2t r t c =,则系统属于 。 (A )离散系统 (B )线性定常系统 (C )线性时变系统 (D )非线性系统 ( ) 9. 设某系统的传递函数为:,1 2186)()()(2+++==s s s s R s C s G 则单位阶跃响应的模态有: (A )t t e e 2,-- (B )t t te e --,
《 自动控制原理B 》 试题A 卷答案 一、单项选择题(本大题共5小题,每小题2分,共10分) 1.若某负反馈控制系统的开环传递函数为 5 (1) s s +,则该系统的闭环特征方程为 ( D )。 A .(1)0s s += B. (1)50s s ++= C.(1)10s s ++= D.与是否为单位反馈系统有关 2.梅逊公式主要用来( C )。 A.判断稳定性 B.计算输入误差 C.求系统的传递函数 D.求系统的根轨迹 3.关于传递函数,错误的说法是 ( B )。 A.传递函数只适用于线性定常系统; B.传递函数不仅取决于系统的结构参数,给定输入和扰动对传递函数也有影响; C.传递函数一般是为复变量s 的真分式; D.闭环传递函数的极点决定了系统的稳定性。 4.一阶系统的阶跃响应( C )。 A .当时间常数较大时有超调 B .有超调 C .无超调 D .当时间常数较小时有超调 5. 如果输入信号为单位斜坡函数时,系统的稳态误差为无穷大,则此系统为( A ) A . 0型系统 B. I 型系统 C. II 型系统 D. III 型系统 二、填空题(本大题共7小题,每空1分,共10分) 1.一个自动控制系统的性能要求可以概括为三个方面:___稳定性、快速性、__准确性___。 2.对控制系统建模而言,同一个控制系统可以用不同的 数学模型 来描述。 3. 控制系统的基本控制方式为 开环控制 和 闭环控制 。 4. 某负反馈控制系统前向通路的传递函数为()G s ,反馈通路的传递函数为()H s ,则系统 的开环传递函数为()()G s H s ,系统的闭环传递函数为 () 1()() G s G s H s + 。 5 开环传递函数为2(2)(1) ()()(4)(22) K s s G s H s s s s s ++= +++,其根轨迹的起点为0,4,1j --±。 6. 当欠阻尼二阶系统的阻尼比减小时,在单位阶跃输入信号作用下,最大超调量将 增大 。 7.串联方框图的等效传递函数等于各串联传递函数之 积 。 三、简答题(本题10分) 图1为水温控制系统示意图。冷水在热交换器中由通入的蒸汽加热,从而得到一定温度的热水。冷水流量变化用流量计测量。试绘制系统方框图,并说明为了保持热水温度为期望值,系统是如何工作的?系统的被控对象和控制装置各是什么?
绪论以下答案确保准确率100% 随堂练习提交截止时间:2021-05-31 23:59:59 当前页有10题,你已做10题,已提交10题,其中答对10题。 1.(单选题) 闭环系统的特点不包含下列哪项()。 A.负反馈B.控制精度较低 C.可减少或消除偏差D.适应性好 答题: A. B. C. D. (已提交) 参考答案:B 问题解析: 2.(单选题) 系统采用负反馈形式连接后,则( )。 A.一定能使闭环系统稳定 B.系统动态性能一定会提高 C.一定能使干扰引起的误差逐渐减小,最后完全消除 D.需要调整系统的结构参数,才能改善系统性能 答题: A. B. C. D. (已提交) 参考答案:D 问题解析: 3.(单选题) 自动控制系统中根据某种函数规律变换控制信号,以利于改善系统的动态品质或静态性能的元件是()。A.比较元件B.校正元件 C.测量反馈元件D.执行元件 答题: A. B. C. D. (已提交) 参考答案:B 问题解析: 4.(单选题) 闭环控制系统的基本环节有给定输入、比较元件、控制对象、执行元件、()等环节。 A.测量反馈元件 B.积分元件 C.微分元件 D.比例元件 答题: A. B. C. D. (已提交) 参考答案:A 问题解析: 5.(单选题) 火炮自动瞄准系统的输入信号是任意函数,这就要求被控量高精度地跟随给定值变化,这种控制系统叫()。 A.恒值调节系统 B.离散系统 C.随动控制系统 D.数字控制系统 答题: A. B. C. D. (已提交) 参考答案:C 问题解析: 6.(单选题) 随动系统对()要求较高。 A.快速性 B.稳定性 C.准确性 D.振荡次数 答题: A. B. C. D. (已提交) 参考答案:A
自动控制原理选择填空
1、反馈控制又称偏差控制,其控制作用是通过 给定值 与反馈量的差值进行的。 2、复合控制有两种基本形式:即按 输入 的前馈复合控制和按 扰动 的前馈复合控制。 3、两个传递函数分别为G 1(s)与G 2(s)的环节,以并联方式连接,其等效传递函数为()G s ,则G(s)为 G1(s)+G2(s) (用G 1(s)与G 2(s) 表示)。 4、典型二阶系统极点分布如图1所示, 则无阻尼自然频率=n ω 2 , 阻尼比=ξ 20.7072 = , 该系统的特征方程为 2220s s ++= , 该系统的单位阶跃响应曲线为 衰减振荡 。 5、若某系统的单位脉冲响应为0.20.5()105t t g t e e --=+, 则该系统的传递函数G(s)为 1050.20.5s s s s +++ 。 6、根轨迹起始于 开环极点 ,终止于 开环零点 。 7、设某最小相位系统的相频特性为101()()90()tg tg T ?ωτωω--=--,则该系 统的开环传递函数为 (1) (1)K s s Ts τ++ 。 8、PI 控制器的输入-输出关系的时域表达式是 1()[()()]p u t K e t e t dt T =+? , 其相应的传递函数为 1[1]p K Ts + ,由于积分环节的引入,可以改善系统的 稳态性能 性能。 二、选择题(每题 2 分,共20分)
1、采用负反馈形式连接后,则 ( D ) A 、一定能使闭环系统稳定; B 、系统动态性能一定会提高; C 、一定能使干扰引起的误差逐渐减小,最后完全消除; D 、需要调整系统的结构参数,才能改善系统性能。 2、下列哪种措施对提高系统的稳定性没有效果 ( A )。 A 、增加开环极点; B 、在积分环节外加单位负反馈; C 、增加开环零点; D 、引入串联超前校正装置。 3、系统特征方程为 0632)(23=+++=s s s s D ,则系统 ( C ) A 、稳定; B 、单位阶跃响应曲线为单调指数上升; C 、临界稳定; D 、右半平面闭环极点数2=Z 。 4、系统在2)(t t r =作用下的稳态误差∞=ss e ,说明 ( A ) A 、 型别2 一、已知系统的状态方程为 s 5 s43s39s2 16s 10 0 ,试用劳斯判据判定系统的稳定性。若系统不稳定,指出在s 平面右半部的特征根的数目。 二、已知随动系统如下图所示,当K=8 时,试求: ( 1)系统的特征参量和 n ? ( 2)系统的动态性能指标%和 t s K g ,试绘制系统的根轨迹。 三、已知系统的开环传递函数为 G k (s) s(s 1)(s2) 四、已知单位反馈系统的开环传递函数为 G(s)=1/(s+1),试根据频率特性的物理意义,求闭环系统输入信号为 r(t)=sin2t 时系统的稳态输出。 五、系统的开环对数幅频特性分段直线近似表示如图(a)所示。系统均为最小相 位系统。试写出其开环传递函数。 六、 设系统开环幅相频率特性如图(a)、(b)所示,其中,其开环传递函数在右半s 平面的极点数为P,系统型别为 v ,试根据奈氏判据判定各系统的闭环稳定性,若系统闭环不稳定,确定其右半 s平面的闭环极点数。 (a)P 0,v 0;(b)P 0,v 1。 Im 10Re Im 10Re (a)(b) 七、 用 Z 变换法解二阶差分方程 c(n 2) 3c(n 1) 2c(n) 0,已知 c(0) 0, c(1)1。 参考答案: 一、 答: 特征方程系数均为正数,满足系统稳定必要条件;列劳斯表: s51316 1910 s 4396161060 s36961 s261010 s1 106(6)10 s 01012 10 首列元素反号两次,系统不稳定,有两个右半平面特征根。二、 答: G ( s)8; s(0.5 s 1) Φ (s) G(s)8 s 2 16 s 2 ωn2 ω2 1G(s)s(0.5s1)82s 16 2 ωs ? n n ω216ω n 4;2ω2ω1, ? 0.25; n? n? n % = e/ 12100%44.4% t s 33 秒 .(0.05) ?ωn 或t1ln1 3.028 秒.(0.05) s?ωn1?2 三、 答: 实轴区间( -∞, -2],[-1,0] 从-1 和 0 出发的两条根轨迹会合后,以±90离°开实轴,然后随着 K 的增大,根轨迹逐渐向右运动,最终越过虚轴进入右半平面。 要求画出图形大概特征,标出起始、终止点,并用箭头标出走向。 物理与光电学院实验中心实验技术人员岗位设置方案 一、设置原则 1.一岗一人,责任落实; 2.二岗(或三岗)为一组,取长补短,发挥团队优势; 3.个别岗位时分多工,保证工作量饱满; 4.协调差异,体现特色,提供个人可持续发展机会。 二、实验室分类 各种教学实验室,按年教务处备案的开课学时数、人时数两个指标计算,若有一个能达到学院平均水平,则定为A类实验室(含其辅助用房),否则为B类实验室(含个别功能房,特点:开课量不大,但涉及学科范围广或前沿、提供创新实践等,体现中心特色实验室,同时需要管理人员花费大量精力进行建设和运行管理)。A、B实验室分类与任务要求见表1.《岗位设置列表》、表2.《物理与光电学院公共实验中心岗位情况表》。 三、应聘要求 1.实验技术方向负责人及以上: 实验室管理岗位工作量组成:Z=N×A+Σk×B+C+J(Σk≥1) 2.团队骨干: 实验室管理岗位工作量组成:Z=N×A+Σk×B+C+J(Σk<1) 3.一般成员: 实验室管理岗位工作量组成:Z=N×A+C 说明: (1)A为A类实验室,参照表1.岗位设置列表,每人竞聘A类实验室数量N为0-2个,按实际竞聘结果择优录取后,上岗工作;需负责实验室到聘期结束的运行维护工作,保证仪器设备固定资产账、物、卡相符率达到100%,设备完好率达90%以上;签订实验室安全责任书并落实安全管理责任,实验室警示标志张贴到位;管理制度及操作规程上墙,实验室使用和安全检查记录完好。承担实验项目更新工作。同时聘期内需承担开课实验室课程。 1 (2)B为B类实验室,每人竞聘B类实验室参照表1.岗位设置列表中相应B类实验室;需负责实验室到聘期结束的运行维护工作,保证仪器设备固定资产账、物、卡相符率达到100%,设备完好率达90%以上;签订实验室安全责任书并落实安全管理责任,实验室警示标志张贴到位;管理制度及操作规程上墙,实验室使用和安全检查记录完好。承担实验项目更新工作计划。应聘时需提供工作思路报告,优先安排能提高B类实验室本科教学使用率、服务层次与水平的竞聘人上岗。 (3)C为教学工作量,由竞聘A类实验室数量,根据学院5号文,即管理 1 个实验室,则聘期内至少完成教学学时数128 /年;管理2 个实验室,则聘期内至少完成教学学时数64 /年; (4)J为绩效工作量,按《华南理工大学第五期“兴华人才工程”实验教学团队建设实施办法》文件,六选三,三项不限类。 (5)此外,学校要求实验技术人员需要坐班制,严格按照学校上下班时间考勤,按月报送给学院和学校,并随时抽查。 2 自动控制原理1 一、单项选择题(每小题1分,共20分) 1. 系统和输入已知,求输出并对动态特性进行研究,称为( ) A.系统综合 B.系统辨识 C.系统分析 D.系统设计 2. 惯性环节和积分环节的频率特性在( )上相等。 A.幅频特性的斜率 B.最小幅值 C.相位变化率 D.穿越频率 3. 通过测量输出量,产生一个与输出信号存在确定函数比例关系值的元件称为( ) A.比较元件 B.给定元件 C.反馈元件 D.放大元件 4. ω从0变化到+∞时,延迟环节频率特性极坐标图为( ) A.圆 B.半圆 C.椭圆 D.双曲线 5. 当忽略电动机的电枢电感后,以电动机的转速为输出变量,电枢电压为输入变量时,电 动机可看作一个( ) } A.比例环节 B.微分环节 C.积分环节 D.惯性环节 6. 若系统的开环传 递函数为2) (5 10+s s ,则它的开环增益为( ) .2 C 7. 二阶系统的传递函数52 5)(2++= s s s G ,则该系统是( ) A.临界阻尼系统 B.欠阻尼系统 C.过阻尼系统 D.零阻尼系统 8. 若保持二阶系统的ζ不变,提高ωn ,则可以( ) A.提高上升时间和峰值时间 B.减少上升时间和峰值时间 C.提高上升时间和调整时间 D.减少上升时间和超调量 9. 一阶微分环节Ts s G +=1)(,当频率T 1=ω时,则相频特性)(ωj G ∠为( ) ° ° ° ° 10.最小相位系统的开环增益越大,其( ) > A.振荡次数越多 B.稳定裕量越大 C.相位变化越小 D.稳态误差越小 11.设系统的特征方程为()0516178234=++++=s s s s s D ,则此系统 ( ) A.稳定 B.临界稳定 C.不稳定 D.稳定性不确定。 12.某单位反馈系统的开环传递函数为:()) 5)(1(++=s s s k s G ,当k =( )时,闭环系统临界稳定。 .20 C 13.设系统的特征方程为()025103234=++++=s s s s s D ,则此系统中包含正实部特征的个数 有( ) .1 C 第一章绪论 1.(单选题)闭环系统的特点不包含下列哪项()。 A.负反馈B.控制精度较低 C.可减少或消除偏差D.适应性好 答题:A.B.C.D.(已提交) 参考答案:B 问题解析: 2.(单选题)系统采用负反馈形式连接后,则()。 A.一定能使闭环系统稳定 B.系统动态性能一定会提高 C.一定能使干扰引起的误差逐渐减小,最后完全消除 D.需要调整系统的结构参数,才能改善系统性能 答题:A.B.C.D.(已提交) 参考答案:D 问题解析: 3.(单选题)自动控制系统中根据某种函数规律变换控制信号,以利于改善系统的动态品质或静态性能的元件是()。 A.比较元件B.校正元件 C.测量反馈元件D.执行元件 答题:A.B.C.D.(已提交) 参考答案:B 问题解析: 4.(单选题)闭环控制系统的基本环节有给定输入、比较元件、控制对象、执行元件、()等环节。 A.测量反馈元件 B.积分元件 C.微分元件 D.比例元件 答题:A.B.C.D.(已提交) 参考答案:A 问题解析: 5.(单选题)火炮自动瞄准系统的输入信号是任意函数,这就要求被控量高精度地跟随给定值变化,这种控制系统叫()。 A.恒值调节系统 B.离散系统 C.随动控制系统 D.数字控制系统 答题:A.B.C.D.(已提交) 参考答案:C 问题解析: 6.(单选题)随动系统对()要求较高。 A.快速性 B.稳定性 C.准确性 D.振荡次数 答题:A.B.C.D.(已提交) 参考答案:A 问题解析: 7.(单选题)衡量系统稳态精度的重要指标时() A.稳定性B.快速性C.准确性D.安全性 答题:A.B.C.D.(已提交) 参考答案:C 问题解析: 8.(单选题)下面不属于对控制系统基本要求的是() A稳定性;B快速性;C准确性;D预测性 答题:A.B.C.D.(已提交) 参考答案:D 问题解析: 9.(单选题)自动控制的基本方式不包括()。 A开环控制;B闭环控制;C复合控制;D计算机控制; 答题:A.B.C.D.(已提交) 参考答案:D 问题解析: 10.(单选题)实际的物理系统都是()。 A.线性的 B.非线性的 C.时不变的 D.恒值的 答题:A.B.C.D.(已提交) 参考答案:B 11.(多选题)自动控制系统的主要特征是()。 A.在结构上具有负反馈通路,以求得偏差信号 B.由偏差产生控制作用以便纠正偏差 C.系统开环 D.控制的目的是减少或消除偏差 答题:A.B.C.D.(已提交) 参考答案:ABD 问题解析: 12.(多选题)自动控制系统按描述元件的动态方程分()。 A.随动系统B.恒值控制系统 C.线性系统D.非线性系统 答题:A.B.C.D.(已提交) 参考答案:CD 问题解析: 13.(判断题)人工控制与自动控制系统最大的区别在于控制过程中是否有人参与。()答题:对.错.(已提交) 参考答案:对 问题解析: 14.(判断题)开环控制系统与闭环控制系统最大的区别在于前者引入了反馈环节。()答题:对.错.(已提交) 参考答案:错 高校实验室在第三方检测市场中的作用 从上个世纪80年代初到本世纪初,高校分析测试中心随着我国高等教育事业的发展变迁,经历了繁荣发展、停滞低迷、寻求突破等几个不同阶段。经过30年的沉浮积淀,已发展成为一支设备精良、人才汇聚、经验丰富的队伍,具市场准入资质,有条件进入第三方检测市场。2014年2月,《国务院办公厅转发中央编办、质检总局关于整合检验检测认证机构实施意见的通知》等产业政策的出台,引发第三方检测市场将产生巨大变革的话题。国有检测机构人心浮动,外资和民营检测机构期待利好。第三方检测市场群雄逐鹿,浪潮涌动。高校分析测试中心在这场改革浪潮中如何发挥自己的优势、拓宽自身发展空间,应认真对待和研究。 1. 检测及第三方检测行业 1.1检测行业的发展及现状分析 检测行业最早起源于贸易,后来,由于地区、国家之间的贸易保护政策,渐渐上升到国家和国际层面。在国际上,检测行业已经是一个很成熟也很重要的行业,但在我国,检测行业则起步较晚。近几年,随着社会的发展、科技的进步和生活水平的提高,人们在安全、健康、环保、技术研究、产品开发、质量监督、公共决策和公共服务等方面都提出了新的要求,检测行业已经渗透到我国社会发展的各个领域,从消费品到工业品,从原材料到成品,从传统产业到新兴产业,从个人到企业、政府,无所不在,无处不用,检测行业具有广阔的市场前景,已经进入快速发展的阶段。据中国国家认证认可监督管理委员会(以下简称国家认监委)统计和预计,2013年我国检验检测市场规模为1678亿元,2014年为2105亿元,2015年将达到2574亿元间。 检测行业是从制造业内部的生产服务部门独立分离出来的新兴产业,是典型的生产性服务业态。2011年12月,《国务院办公厅关于加快发展技术服务业的指导意见》把检测行业列为8个重点推进的高技术服务业领域之一。可见,国家对检测行业具有"高技术服务业"和"生产性服务业"的双重定位,充分显示了国家对检测行业的高度重视。2012年12月1日,国务院正式印发了《服务业"十二五"发展规划》,对检测行业发展有了更加明确的定位,提出了更高要求,同时也为检测行业带来了利好。 我国国有检验检测资源分布呈现显著的行业格局,主要分布在质检、农业、住建、卫生、食药、铁道、机械、环保、交通、高校等行业。我国政府根据加入WTO的承诺,大约是在2003年以后,允许外资独资进入我国检验检测行业,目前主要有英国INTERTEK、瑞士SGS、德国TUV、德国、法国BV、美国UL等实力雄厚、公信力强的大品牌跨国公司。我国允许民营资本进入检验检测行业是在上世纪80年代。近几年,民营检测机构悄悄发展起来,甚至有少数企业发展成了上市公司,具有较强的市场竞争力,如华测检测技术股份有限公司。据统计,目前我国通过省级以上计量认证的检验检测机构达25000多家。 国家质检总局科技司处长龚润军2014年4月在"全国检验检测认证机构整合工作进展"报告中给出的数据是:国有检验检测机构数量占国内机构总数近80%,市场份额约占55%;民营检验检测机构数量约占19.5%,市场份额约占20%;外资检验检测机掏数量约占0.5%,市场份额约占25%。 1.2第三方检测的基本概念及特点 第三方检测最早进入人们的视野中并逐渐被人们所熟识,是由于近几年频频出现的食品安全事件,如"三聚氨胶事件"、"地沟袖事件"。所谓第三方检测又称公正检验,指2个相互联系的主体之外的某个客体,我们称其为第三方。第三方可以是和2个主体有联系,也可以是独立于2个主体之外,是由处于买卖利益之外的第三方(如专职监督检验机构),以公正、权威的非当事人身份,根据有关法律、标准或合同所进行的商品检验活动。 1、反馈控制又称偏差控制,其控制作用是通过 给定值 与反馈量的 差值进行的。 2、复合控制有两种基本形式:即按 输入 的前馈复合控制和按 扰动 的前馈复合控制。 3、两个传递函数分别为G 1(s)与G 2(s)的环节,以并联方式连接,其等效传 递函数为()G s ,则G(s)为 G1(s)+G2(s) (用G 1(s)与G 2(s) 表示)。 4、典型二阶系统极点分布如图1所示, 则无阻尼自然频率=n ω 阻尼比=ξ 0.707= , 该系统的特征方程为 2220s s ++= , 该系统的单位阶跃响应曲线为 衰减振荡 。 5、若某系统的单位脉冲响应为0.20.5()105t t g t e e --=+, 则该系统的传递函数G(s)为 1050.20.5s s s s +++ 。 6、根轨迹起始于 开环极点 ,终止于 开环零 点 。 7、设某最小相位系统的相频特性为101()()90()tg tg T ?ωτωω--=--,则该 系统的开环传递函数为 (1) (1)K s s Ts τ++ 。 8、PI 控制器的输入-输出关系的时域表达式是 1()[()()]p u t K e t e t d t T =+? , 其相应的传递函数为 1[1]p K Ts + ,由于积分环节的引入,可以改善系统的 稳态性能 性能。 二、选择题(每题 2 分,共20分) 1、采用负反馈形式连接后,则 ( D ) A 、一定能使闭环系统稳定; B 、系统动态性能一定会提高; C 、一定能使干扰引起的误差逐渐减小,最后完全消除; D 、需要调整系统的结构参数,才能改善系统性能。 2、下列哪种措施对提高系统的稳定性没有效果 ( A )。 A 、增加开环极点; B 、在积分环节外加单位负反 馈; C 、增加开环零点; D 、引入串联超前校正装置。 3、系统特征方程为 0632)(23=+++=s s s s D ,则系统 ( C ) A 、稳定; B 、单位阶跃响应曲线为单调指数上 升; C 、临界稳定; D 、右半平面闭环极点数2=Z 。 4、系统在2)(t t r =作用下的稳态误差∞=ss e ,说明 ( A ) A 、 型别2 分析测试中心电子探针(EPMA)简介 一、仪器概述 电子探针利用聚焦得非常细(微米-纳米级)的高能电子束轰击样品,激发出各种被测物质的有用信息(如特征X射线、二次电子、背散射电子等),通过分析这些有用信息达到对样品微区成分分析和形貌观察的目的。 电子探针与扫描电镜的结构大致相似,不同的是电子探针有一套完整的X射线波长和能量探测装置(波谱仪WDS和能谱仪EDS),用来探测电子束轰击样品所激发的特征X射线。由于特征X射线的能量或波长随着原子序数的不同而不同,只要探测入射电子在样品中激发出的特征X射线波长或能量,就可获得样品中所含的元素种类和含量,以此对样品微区成分进行定量分析是电子探针最大的特点。 分析测试中心已安装的电子探针是日本岛津公司生产的EPMA-1600型最新产品,它不仅具有较高的X射线检出角,同时由于使用全聚焦的X射线分光晶体,能兼顾X 射线检测的高灵敏度和高分辨率,并配有高稳定的电子光学系统、真空系统及高精度机械系统以及EDAX公司生产的Genesis能谱仪,是目前华南地区最先进的微区成分定性定量分析和形貌观察用大型精密科研仪器之一。 二、仪器用途 适用于材料(合金、陶瓷、半导体材料等)、矿物、冶金、机械、微电子等领域的微区化学组成定性和定量分析、微区化学组成线分析、微区化学组成面分析以及各类固体产品的微区形貌观察与成分分布图像等,是对试样表面形貌观察、微区组织结构和元素定性定量分析的最有效、原位(in-situ)表征手段。 三、仪器的性能与特点 1、具有较高的X-射线检出角(52.5?),有利于提高仪器空间分辨率和凸凹样品分析观察的可靠性;分光晶体采用Johanson型全聚焦分光晶体,同一道波谱仪兼顾高分辨率和高灵敏度。 2、分析精度:好于1%(主要元素,含量>5%)和5%(次要元素,含量~1%);谱仪检测极限:大于10ppm。 3、分析元素范围:4Be-92U;加速电压:0.2-30kV(可调步长≤0.5kV);二次电子像分辨率:6nm;放大倍数:50-300000?,连续可调(有效图像观察倍数≤50000?)。 4、电子束流稳定性:好于1.5?10-3/h;电子束流:10-12–10-5A,连续可调,绝对准确值好于10%。 5、样品台最小移动间距为0.02微米,重复精度好于±1μm,机械系统精密度高。 1. 试将下列系统的结构图化简(本题10分) (说明:本题考查对 第二章第三节 系统结构图化简及等效变换的掌握程度,该类题目有两种求解方法。第一种求解方法可参见课本44~47页的例题2-11、2-12、2-13等。第二种方法可利用46页公式2-82,两种方法结果一样。) — 2. 已知单位反馈系统的开环传递函数如下,试确定使系统稳定的开环放大系数K 的取值范围。(本题10分) ()(2)(4) = ++K K G s s s s (说明:本题考查对 第三章第一节 劳斯稳定判据的理解和应用,可参见课本67页例题3-6。一样的求解思路) 1)试判断该系统属于几型系统。 2)系统的开环放大系数K 是多少? 3)试判断该系统是否稳定。 4)试求在输入信号2 ()2+4+5=r t t t 作用下,系统的稳态误差是多少。 (说明:本题考查对第三章第六节 稳态误差相关知识的理解和计算。可参见课本105页表3-6的总结及例题3-16。) 答:(1) 由系统开环函数可知系统为Ⅰ型系统 (2) 由 G (s )= )15)(125.0(5 .2)15)(4(s 10++= ++s s s s s 可知向前积分环节有一个,系统是Ⅰ型系统,且开环放大系数K= 2.5。 4. 某二阶系统的结构图如图(a)所示,该系统的单位阶跃响应如图(b)所示。(本题20 分) 1)试计算该系统的性能指标:稳态值、超调量; 2)试确定系统参数K 1,K 2和a 。 答:1)由系统的单位阶跃响应曲线(图b )可以得出 ??? ? ???? =-===∞%33334%1.0t 3)(σp C 12及转折后斜率的变化量。可参看例题5-3。一样的求解思路) 答:1)将传递函数变形为 )125.0)(1(100 )s (++= s s G 其对应的频率特性表达式 )125.0)(1(100 )(++= ωωj j s G 自动控制原理试题库含 答案 集团标准化工作小组 #Q8QGGQT-GX8G08Q8-GNQGJ8-MHHGN# 一、填空题(每空 1 分,共15分) 1、反馈控制又称偏差控制,其控制作用是通过给定值与反馈量的差值进行的。 2、复合控制有两种基本形式:即按输入的前馈复合控制和按扰动的前馈复合控制。 3、两个传递函数分别为G 1(s)与G 2(s)的环节,以并联方式连接,其等效传递函数为 ()G s ,则G(s)为G1(s)+G2(s)(用G 1(s)与G 2(s) 表示)。 4、典型二阶系统极点分布如图1所示, 则无阻尼自然频率 n ω 阻尼比=ξ,0.7072 = 该系统的特征方程为2220s s ++= , 该系统的单位阶跃响应曲线为衰减振荡。 5、若某系统的单位脉冲响应为0.20.5()105t t g t e e --=+, 则该系统的传递函数G(s)为 105 0.20.5s s s s + ++。 6、根轨迹起始于开环极点,终止于开环零点。 7、设某最小相位系统的相频特性为101()()90()tg tg T ?ωτωω--=--,则该系统的开环传 递函数为(1) (1)K s s Ts τ++。 8、PI 控制器的输入-输出关系的时域表达式是 1 ()[()()]p u t K e t e t dt T =+ ?, 其相应的传递函数为 1 [1] p K Ts + ,由于积分环节的引入,可以改善系统的稳态性能。 1、在水箱水温控制系统中,受控对象为水箱,被控量为水温。 2、自动控制系统有两种基本控制方式,当控制装置与受控对象之间只有顺向作用而无反向联系时,称为开环控制系统;当控制装置与受控对象之间不但有顺向作用而且还有反向联系时,称为闭环控制系统;含有测速发电机的电动机速度控制系统,属于闭环控制系统。 3、稳定是对控制系统最基本的要求,若一个控制系统的响应曲线为衰减振荡,则该系统稳定。判断一个闭环线性控制系统是否稳定,在时域分析中采用劳斯判据;在频域分析中采用奈奎斯特判据。 4、传递函数是指在零初始条件下、线性定常控制系统的输出拉氏变换与输入拉氏变换之比。 5、设系统的开环传递函数为 2(1)(1) K s s Ts τ++ 为arctan 180arctan T τωω--。 6、频域性能指标与时域性能指标有着对应关系,开环频域性能指标中的幅值穿越频率 c ω对应时域性能指标调整时间s t ,它们反映了系统动态过程的。 1、对自动控制系统的基本要求可以概括为三个方面,即:稳定性、快速性和准确性。 2、控制系统的输出拉氏变换与输入拉氏变换在零初始条件下的比值称为传递函数。一阶系统传函标准形式是1 ()1 G s Ts = +,二阶系统传函标准形式是22 2 ()2n n n G s s s ωζωω=++。 3、在经典控制理论中,可采用劳斯判据、根轨迹法或奈奎斯特判据等方法判断线性控制系统稳定性。 4、控制系统的数学模型,取决于系统结构和参数, 与外作用及初始条件无关。华工《自动控制原理》第二次作业.docx
物理与光电学院实验中心实验技术人员岗位设置方案-华南理工大学
自动控制原理选择题库
2019-2020华工网络自动控制原理随堂练习答案
高校实验室在第三方检测市场中的作用
自动控制原理选择填空
分析测试中心电子探针(EPMA)简介
华南理工第一学期自动控制原理平时作业
自动控制原理试题库含答案
相关主题
文本预览