
Multiscale Combinatorial Grouping for Image Segmentation and Object Proposal Generation
Jordi Pont-Tuset*,Pablo Arbel′aez*,Jonathan T.Barron,Member,IEEE,Ferran Marques,Senior Member,IEEE,Jitendra Malik,Fellow,IEEE
Abstract —We propose a uni?ed approach for bottom-up hierarchical image segmentation and object proposal generation for recognition,called Multiscale Combinatorial Grouping (MCG).For this purpose,we ?rst develop a fast normalized cuts algorithm.We then propose a high-performance hierarchical segmenter that makes effective use of multiscale information.Finally,we propose a grouping strategy that combines our multiscale regions into highly-accurate object proposals by exploring ef?ciently their combinatorial space.We also present Single-scale Combinatorial Grouping (SCG),a faster version of MCG that produces competitive proposals in under ?ve second per image.We conduct an extensive and comprehensive empirical validation on the BSDS500,SegVOC12,SBD,and COCO datasets,showing that MCG produces state-of-the-art contours,hierarchical regions,and object proposals.Index Terms —Image segmentation,object proposals,normalized cuts.
!
1I NTRODUCTION
T
WO
paradigms have shaped the ?eld of object recog-nition in the last decade.The ?rst one,
popularized by the Viola-Jones face detection algorithm [1],formu-lates object localization as window classi?cation.The ba-sic scanning-window architecture,relying on histograms of gradients and linear support vector machines,was introduced by Dalal and Triggs [2]in the context of pedestrian detection and is still at the core of leading ob-ject detectors on the Pascal challenge such as Deformable Part Models [3].
The second paradigm relies on perceptual grouping to provide a limited number of high-quality and category-independent object proposals,which can then be de-scribed with richer representations and used as input to more sophisticated learning methods.Examples in this family are [4],[5].Recently,this approach has dominated the Pascal segmentation challenge [6],[7],[8],improved object detection [9],?ne-grained categorization [10]and proven competitive in large-scale classi?cation [11].Since the power of this second paradigm is critically dependent on the accuracy and the number of object proposals,an increasing body of research has delved into the problem of their generation [12],[13],[14],
?J.Pont-Tuset and F.Marques are with the Department of Signal Theory and Communications,Universitat Polit`e cnica de Catalunya,BarcelonaTech (UPC),Spain.E-mail:{jordi.pont,ferran.marques }@https://www.doczj.com/doc/9911137988.html, ?P .Arbel′a ez is with the Department of Biomedical Engineering,Universi-dad de los Andes,Colombia.E-mail:pa.arbelaez@https://www.doczj.com/doc/9911137988.html,.co
?J.T.Barron,and J.Malik are with the Department of Electrical Engineering and Computer Science,University of California at Berkeley,Berkeley,CA 94720.E-mail:{barron,malik }@https://www.doczj.com/doc/9911137988.html, *The ?rst two authors contributed equally
Fig.1.Top:original image,instance-level ground truth from COCO and our multiscale hierarchical segmenta-tion.Bottom:our best object proposals among 150.[11],[15],[16],[6],[11],[17].However,those approaches typically focus on learning generic properties of objects from a set of examples,while reasoning on a ?xed set of regions and contours produced by external bottom-up segmenters such as [18],[19].
In this paper,we propose a uni?ed approach to multiscale hierarchical segmentation and object proposal generation called Multiscale Combinatorial Grouping (MCG).Fig.1shows an example of our results and Fig.2an overview of our pipeline.Our main contributions are:?An ef?cient normalized cuts algorithm,which in practice provides a 20×speed-up to the eigenvector computation required for contour globalization [18],[20](Sect.3.1).
?A state-of-the-art hierarchical segmenter that lever-ages multiscale information (Sect.4).
?A grouping algorithm that produces accurate object proposals by ef?ciently exploring the combinatorial space of our multiscale regions (Sect.6).
We conduct a comprehensive and large-scale empirical
a r X i v :1503.00848v 3 [c s .C V ] 29 J u n 2015
F ixed-Scale
Segmentation R
escaling &A lignment
C ombination
C ombinatorial Grouping
I mage P yramid Segmentation P yramid Ali gned H ierarchies Object Proposals
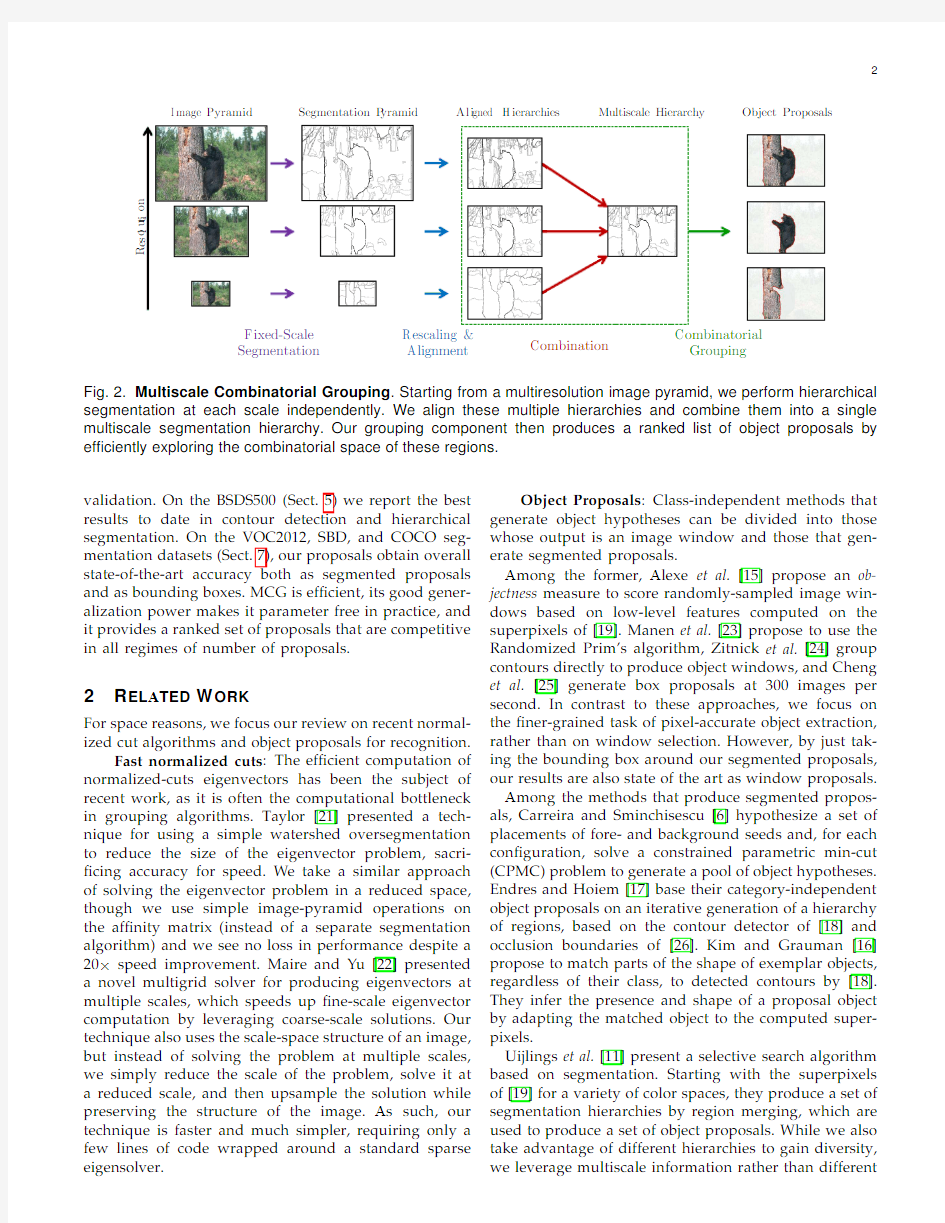
Multiscale Hierarchy Fig.2.Multiscale Combinatorial Grouping .Starting from a multiresolution image pyramid,we perform hierarchical segmentation at each scale independently.We align these multiple hierarchies and combine them into a single multiscale segmentation hierarchy.Our grouping component then produces a ranked list of object proposals by ef?ciently exploring the combinatorial space of these regions.validation.On the BSDS500(Sect.5)we report the best results to date in contour detection and hierarchical segmentation.On the VOC2012,SBD,and COCO seg-mentation datasets (Sect.7),our proposals obtain overall state-of-the-art accuracy both as segmented proposals and as bounding boxes.MCG is ef?cient,its good gener-alization power makes it parameter free in practice,and it provides a ranked set of proposals that are competitive in all regimes of number of proposals.
2R ELATED W ORK
For space reasons,we focus our review on recent normal-ized cut algorithms and object proposals for recognition.
Fast normalized cuts :The ef?cient computation of normalized-cuts eigenvectors has been the subject of recent work,as it is often the computational bottleneck in grouping algorithms.Taylor [21]presented a tech-nique for using a simple watershed oversegmentation to reduce the size of the eigenvector problem,sacri-?cing accuracy for speed.We take a similar approach of solving the eigenvector problem in a reduced space,though we use simple image-pyramid operations on the af?nity matrix (instead of a separate segmentation algorithm)and we see no loss in performance despite a 20×speed improvement.Maire and Yu [22]presented a novel multigrid solver for producing eigenvectors at multiple scales,which speeds up ?ne-scale eigenvector computation by leveraging coarse-scale solutions.Our technique also uses the scale-space structure of an image,but instead of solving the problem at multiple scales,we simply reduce the scale of the problem,solve it at a reduced scale,and then upsample the solution while preserving the structure of the image.As such,our technique is faster and much simpler,requiring only a few lines of code wrapped around a standard sparse eigensolver.
Object Proposals :Class-independent methods that generate object hypotheses can be divided into those whose output is an image window and those that gen-erate segmented proposals.
Among the former,Alexe et al.[15]propose an ob-jectness measure to score randomly-sampled image win-dows based on low-level features computed on the superpixels of [19].Manen et al.[23]propose to use the Randomized Prim’s algorithm,Zitnick et al.[24]group contours directly to produce object windows,and Cheng et al.[25]generate box proposals at 300images per second.In contrast to these approaches,we focus on the ?ner-grained task of pixel-accurate object extraction,rather than on window selection.However,by just tak-ing the bounding box around our segmented proposals,our results are also state of the art as window proposals.Among the methods that produce segmented propos-als,Carreira and Sminchisescu [6]hypothesize a set of placements of fore-and background seeds and,for each con?guration,solve a constrained parametric min-cut (CPMC)problem to generate a pool of object hypotheses.Endres and Hoiem [17]base their category-independent object proposals on an iterative generation of a hierarchy of regions,based on the contour detector of [18]and occlusion boundaries of [26].Kim and Grauman [16]propose to match parts of the shape of exemplar objects,regardless of their class,to detected contours by [18].They infer the presence and shape of a proposal object by adapting the matched object to the computed super-pixels.
Uijlings et al.[11]present a selective search algorithm based on segmentation.Starting with the superpixels of [19]for a variety of color spaces,they produce a set of segmentation hierarchies by region merging,which are used to produce a set of object proposals.While we also take advantage of different hierarchies to gain diversity,we leverage multiscale information rather than different
3
cascade of
should be
[27]
merging
to different
also
to produce
Malisiewicz and Efros[4]took one of the?rst steps
towards combinatorial grouping,by running multiple
segmenters with different parameters and merging up
to three adjacent regions.In[7],another step was taken
by considering hierarchical segmentations at three differ-
ent scales and combining pairs and triplets of adjacent
regions from the two coarser scales to produce object
proposals.
The most recent wave of object proposal algorithms
is represented by[12],[13],and[14],which all keep the
quality of the seminal proposal works while improving
the speed considerably.Kr¨a henb¨uhl and Koltun[12]
?nd object proposal by identifying critical level sets
in geodesic distance transforms,based on seeds placed
in learnt places in the image.Rantalankila et al.[13]
perform a global and local search in the space of sets
of superpixels.Humayun et al.[14]reuse a graph to
perform many parametric min-cuts over different seeds
in order to speed the process up.
A substantial difference between our approach and
previous work is that,instead of relying on pre-
computed hierarchies or superpixels,we propose a uni-
?ed approach that produces and groups high-quality
multiscale regions.With respect to the combinatorial ap-
proaches of[4],[7],our main contribution is to develop
ef?cient algorithms to explore a much larger combinato-
rial space by taking into account a set of object examples,
increasing the likelihood of having complete objects in
the pool of proposals.Our approach has therefore the
?exibility to adapt to speci?c applications and types
of objects,and can produce proposals at any trade-off
between their number and their accuracy.
3T HE S EGMENTATION A LGORITHM
Consider a segmentation of the image into regions that
partition its domain S={S i}i.A segmentation hierarchy
is a family of partitions{S?,S1,...,S L}such that:(1)
S?is the?nest set of superpixels,(2)S L is the complete
domain,and(3)regions from coarse levels are unions of
regions from?ne levels.A hierarchy where each level S i
is assigned a real-valued indexλi can be represented by a
dendrogram,a region tree where the height of each node
is its index.Furthermore,it can also be represented as an
ultrametric contour map(UCM),an image obtained by
weighting the boundary of each pair of adjacent regions
in the hierarchy by the index at which they are merged
[29],[30].This representation uni?es the problems of
contour detection and hierarchical image segmentation:
Fig.3.Duality between a UCM and a region tree:
Schematic view of the dual representation of a seg-
mentation hierarchy as a region dendrogram and as an
ultrametric contour map.
a threshold at levelλi in the UCM produces the segmen-
tation S i.
Figure3schematizes these concepts.First,the lower
left corner shows the probability of boundary of a UCM.
One of the main properties of a UCM is that when we
threshold the contour strength at a certain value,we
obtain a closed boundary map,and thus a partition.
Thresholding at differentλi,therefore,we obtain the
so-called merging-sequence partitions(left column in
Figure3);named after the fact that a step in this sequence
corresponds to merging the set of regions sharing the
boundary of strength exactlyλi.
For instance,the boundary between the wheels and
the?oor has strengthλ1,thus thresholding the contour
aboveλ1makes the wheels merge with the?oor.If we
represent the regions in a partition as nodes of a graph,
we can then represent the result of merging them as their
parent in a tree.The result of sweeping allλi values
can therefore be represented as a region tree,whose root
is the region representing the whole image(right part
of Figure3).Given that each merging is associated with
a contour strength,the region tree is in fact a region
dendogram.
As an example,in the gPb-ucm algorithm of[18],
brightness,color and texture gradients at three?xed disk
sizes are?rst computed.These local contour cues are
globalized using spectral graph-partitioning,resulting in
the gPb contour detector.Hierarchical segmentation is
then performed by iteratively merging adjacent regions
based on the average gPb strength on their common
boundary.This algorithm produces therefore a tree of
regions at multiple levels of homogeneity in brightness,
color and texture,and the boundary strength of its UCM
can be interpreted as a measure of contrast.
Coarse-to-?ne is a powerful processing strategy in
computer vision.We exploit it in two different ways
to develop an ef?cient,scalable and high-performance
segmentation algorithm:(1)To speed-up spectral graph
partitioning and(2)To create aligned segmentation hi-
erarchies.
4
3.1Fast Downsampled Eigenvector Computation The normalized cuts criterion is a key globalization mechanism of recent high-performance contour detec-tors such as[18],[20].Although powerful,such spectral graph partitioning has a signi?cant computational cost and memory footprint that limit its scalability.In this section,we present an ef?cient normalized cuts approx-imation which in practice preserves full performance for contour detection,while having low memory require-ments and providing a20×speed-up.
Given a symmetric af?nity matrix A,we would like to compute the k smallest eigenvectors of the Laplacian of A.Directly computing such eigenvectors can be very costly even with sophisticated solvers,due to the large size of A.We therefore present a technique for ef?ciently approximating the eigenvector computation by taking advantage of the multiscale nature of our problem:A models af?nities between pixels in an image,and images naturally lend themselves to multiscale or pyramid-like representations and algorithms.
Our algorithm is inspired by two observations:1) if A is bistochastic(the rows and columns of A sum to1)then the eigenvectors of the Laplacian A are equal to the eigenvectors of the Laplacian of A2,and 2)because of the scale-similar nature of images,the eigenvectors of a“downsampled”version of A in which every other pixel has been removed should be similar to the eigenvectors of A.Let us de?ne pixel decimate(A), which takes an af?nity matrix A and returns the indices of rows/columns in A corresponding to a decimated version of the image from which A was constructed.That is,if i=pixel decimate(A),then A[i,i]is a decimated matrix in which alternating rows and columns of the im-age have been https://www.doczj.com/doc/9911137988.html,puting the eigenvectors of A[i,i]works poorly,as decimation disconnects pixels in the af?nity matrix,but the eigenvectors of the decimated squared af?nity matrix A2[i,i]are similar to those of A, because by squaring the matrix before decimation we intuitively allow each pixel to propagate information to all of its neighbors in the graph,maintaining connec-tions even after decimation.Our algorithm works by ef?ciently computing A2[i,i]as A[:,i]T A[:,i](the naive approach of?rst squaring A and then decimating it is prohibitively expensive),computing the eigenvectors of A2[i,i],and then“upsampling”those eigenvectors back to the space of the original image by pre-multiplying by A[:,i].This squaring-and-decimation procedure can be applied recursively several times,each application improving ef?ciency while slightly sacri?cing accuracy. Pseudocode for our algorithm,which we call “DNCuts”(Downsampled Normalized Cuts)is given in Algorithm1,where A is our af?nity matrix and d is the number of times that our squaring-and-decimation operation is applied.Our algorithm repeatedly applies our joint squaring-and-decimation procedure,computes the smallest k eigenvectors of the?nal“downsam-pled”matrix A d by using a standard sparse eigensolver Algorithm1dncuts(A,d,k)
1:A0←A
2:for s=[1:d]do
3:i s←pixel decimate(A s?1)
4:B s←A s?1[:,i s]
5:C s←diag(B s 1)?1B s
6:A s←C T s B s
7:end for
8:X d←ncuts(A d,k)
9:for s=[d:?1:1]do
10:X s?1←C s X s
11:end for
12:return whiten(X0)
ncuts(A d,k),and repeatedly“upsamples”those eigen-vectors.Because our A is not bistochastic and decimation is not an orthonormal operation,we must do some normalization throughout the algorithm(line5)and whiten the resulting eigenvectors(line10).We found that values of d=2or d=3worked well in https://www.doczj.com/doc/9911137988.html,rger values of d yielded little speed improvement(as much of the cost is spent downsampling A0)and start negatively affecting accuracy.Our technique is similar to Nystrom’s method for computing the eigenvectors of a subset of A, but our squaring-and-decimation procedure means that we do not depend on long-range connections between pixels.
3.2Aligning Segmentation Hierarchies
Spatially transforming an UCM is nontrivial because its boundaries are one-dimensional entities whose topol-ogy and strength determine the underlying hierarchy, and an error at a single pixel can have drastic effects. Therefore,instead of manipulating the UCM directly,we opt for sampling uniformly K levels in the hierarchy, transforming them sequentially,and reconstructing from their boundaries a transformed UCM.
We consider two different segmentations R={R i}i and S={S j}j.We de?ne the projection of the segmen-tation R onto a region S j∈S as the majority label
π(R,S j)=arg max
i
|S j∩R i|
|S j|
(1) And the projection of R onto S as
π(R,S)={π(R,S j)}j.(2) In order to project an UCM onto a target segmentation S,which we denoteπ(UCM,S),we project each of the levels in the hierarchy in turn.
In the next section,we will iterate this procedure,and project an UCM recursively to a set of target segmenta-tions{S1?,...,S N?}.However,note that the composition of two such projections can be written as:
π(π(UCM,S1),S2)=π(UCM,S1)?π(S1,S2).(3)
5
In practice,this property means that successive projec-tions of the target segmentations can be pre-computed, the UCM has to be projected only to the?rst target segmentation,and its?nal labels are obtained by N?1 look-ups.This procedure is summarized in pseudo-code in Algorithm2
Algorithm2UCM Rescaling and Alignment Require:An UCM and a set of levels[t1,...,t K] Require:A set of target segmentations{S1?,...,S N?} 1:Pre-compute target projections with(2):
2:π(S1?,S2?),π(π(S1?,S2?),S3?),...
3:UCMπ←0
4:for t=[t1,...,t K]do
5:S←sampleHierarchy(UCM,t)
6:S←rescaleSegmentation(S,S1?)
7:S←π(S,S1?)
8:S←readLabels(S,{S1?,...,S N?})
9:contours←extractBoundary(S)
10:UCMπ←max(UCMπ,t?contours)
11:end for
12:return UCMπ
Note that,by construction,the routines sampleHierarchy and extractBoundary are fast,as they involve only connected component labeling and thresholding operations.The complexity is thus dominated by the transformations in Steps6and7, which are computed K times.
4M ULTISCALE H IERARCHICAL S EGMENTA-TION
Single-scale segmentation:We consider as input the following local contour cues:(1)brightness,color and texture differences in half-disks of three sizes[31],(2) sparse coding on patches[20],and(3)structured forest contours[32].We globalize the contour cues indepen-dently using our fast eigenvector gradients of Sect.3.1, combine global and local cues linearly,and construct an UCM based on the mean contour strength.We tried learning weights using gradient ascent on the F-measure on the training set[18],but evaluating the?nal hierar-chies rather than open contours.We observed that this objective favors the quality of contours at the expense of regions and obtained better overall results by optimizing the Cover metric.
Hierarchy Alignment:We construct a multiresolu-tion pyramid with N scales by subsampling/super-sampling the original image and applying our single-scale segmenter.In order to preserve thin structures and details,we declare as set of possible boundary locations the?nest superpixels S N?in the highest-resolution.We extract the?nest superpixels of each hierarchy,rescale them to the original image resolution,pre-compute their successive projections to S N?and then transfer recur-sively the strength of all the coarser UCMs by applying Algorithm2.
Multiscale Hierarchy:After alignment,we have a ?xed set of boundary locations,and N strengths for each of them,coming from the different scales.We formulate this problem as binary boundary classi?cation and train a classi?er that combines these N features into a single probability of boundary estimation.We exper-imented with several learning strategies for combining UCM strengths:(a)Uniform weights transformed into probabilities with Platt’s method.(b)SVMs and logistic regression,with both linear and additive kernels.(c) Random Forests.(d)The same algorithm as for single-scale.We found the results with all learning methods surprisingly similar,in agreement with the observation reported by[31].This particular learning problem,with only a handful of dimensions and millions of data points, is relatively easy and performance is mainly driven by our already high-performing and well calibrated fea-tures.We therefore use the simplest option(a).
5E XPERIMENTS ON THE BSDS500
We conduct extensive experiments on the BSDS500[33], using the standard evaluation metrics and following the best practice rules of that dataset.We also report results with a recent evaluation metric F op[34],Precision-Recall for objects and parts,using the publicly-available code.
Single-scale Segmentation:Table1-top shows the performance of our single-scale segmenter for different types of input contours on the validation set of the BSDS500.We obtain high-quality hierarchies for all the cues considered,showing the generality of our approach. Furthermore,when using them jointly(row’Comb.’in top panel),our segmenter outperforms the versions with individual cues,suggesting its ability to leverage diversi?ed inputs.In terms of ef?ciency,our fast nor-malized cuts algorithm provides an average20×speed-up over[18],starting from the same local cues,with no signi?cant loss in accuracy and with a low memory footprint.
Multiscale Segmentation:Table1-bottom evaluates our full approach in the same experimental conditions as the upper panel.We observe a consistent improvement in performance in all the metrics for all the inputs,which validates our architecture for multiscale segmentation. We experimented with the range of scales and found N={0.5,1,2}adequate for our purposes.A?ner sampling or a wider range of scales did not provide noticeable improvements.We tested also two degraded versions of our system(not shown in the table).For the?rst one,we resized contours to the original image resolution,created UCMs and combined them.For the second one,we transformed per-scale UCMs to the original resolution,but omitted the strength transfer to the?nest superpixels.The?rst ablated version produces interpolation artifacts and smooths away details,while the second one suffers from misalignment.Both fail to improve the performance of the single-scale result, which provides additional empirical support for our multiscale approach.
6
Boundary
Region F b
F op SC
PRI
VI
Input
ODS OIS ODS OIS ODS OIS ODS
OIS
ODS OIS S i n g l e -S c a l e
Pb [31]0.7020.7330.3340.3700.5770.6360.8010.847 1.692 1.490SC [20]0.6970.7250.2640.3060.5400.6070.7770.835 1.824 1.659SF [32]0.7190.7370.3380.3990.5820.6510.8030.851 1.608 1.432Comb.0.7190.7500.3580.4030.6020.6550.8090.855 1.619 1.405M u l t i s c a l e Pb [31]0.7130.7450.3500.3890.5980.6560.8070.856 1.601 1.418SC [20]0.7050.7340.3310.3840.5790.6470.7990.851 1.637 1.460SF [32]0.7250.7440.3700.4200.6000.6600.8100.854 1.557 1.390Comb.
0.725
0.757
0.371
0.408
0.611
0.670
0.813
0.862
1.548
1.367
T ABLE 1
BSDS500val set.Control experiments for single-scale (top)and multiscale (bottom)hierarchical segmentation
with different input contour detectors
Since there are no drastic changes in our results when taking as input the different individual cues or their com-bination,in the sequel we use the version with structured forests for ef?ciency reasons,which we denote Ours-multi .
Comparison with state-of-the-art.:Figure 4com-pares our multiscale hierarchical segmenter MCG (
)and our single-scale hierarchical segmenter SCG ()on the BSDS500test set against all the methods for which there is publicly available code.We also compare to the recent ISCRA [27]hierarchies (),provided precomputed by the authors.We obtain consistently the best results to date on BSDS500for all operating regimes,both in terms of boundary and region quality.
Note that the range of object scales in the BSDS500is limited,which translates into modest absolute gains from MCG ()with respect to SCG ()in terms of boundary evaluation (left-hand plot),but more sig-ni?cant improvements in terms of objects and parts (right-hand plot).We will also observe more substantial improvements with respect to gPb-UCM ()when we move to Pascal,SBD,and COCO in Section 7(e.g.see Fig.8).
Ground-Truth Hierarchy :In order to gain further insights,we transfer the strength of each ground-truth segmentation to our highest-resolution superpixels S N ?and construct a combined hierarchy.This approxima-tion to the semantic hierarchy,Ground-Truth Hierarchy (GTH)in Fig.4,is an upper-bound for our approach as both share the same boundary locations and the only difference is their strength.Since the strength of GTH is proportional to the number of subjects marking it,it provides naturally the correct semantic ordering,where outer object boundaries are stronger than internal parts.Recently,Maire et al.[35]developed an annotation tool where the user encodes explicitly the “perceptual strength”of each contour.Our approach provides an alternative where the semantic hierarchy is reconstructed by sampling ?at annotations from multiple subjects.
6O BJECT P ROPOSAL G ENERATION
The image segmentation algorithm presented in the previous sections builds on low-level features,so its regions are unlikely to represent accurately complete objects with heterogeneous parts.In this context,object proposal techniques create a set of hypotheses,possibly overlapping,which are more likely to represent full object instances.
Our approach to object proposal generation is to combinatorially look for sets of regions from our seg-mentation hierarchies that merged together are likely to represent complete objects.In this section,we ?rst describe the ef?cient computation of certain region de-scriptors on a segmentation tree.Then,we describe how we use these techniques to ef?ciently explore the sets of merged regions from the hierarchy.Finally,we explain how we train the parameters of our algorithm for object proposals and how we rank the candidates by their probability of representing an object.
Fast computation of descriptors :Let us assume,for instance,we want to compute the area of all regions in the hierarchy.Intuitively,working strictly on the merging-sequence partitions,we would need to scan all pixels in all partitions.On the other hand,working on the region tree allows us to scan the image only once to compute the area of the leaves,and then propagate the area to all parents as the addition of the areas of their children.
As a drawback,the algorithms become intricate in terms of coding and necessary data structures.Take,for instance,the computation of the neighbors of a certain region,which is trivial via scanning the partition on the merging sequence (look for region labels in the adjacent boundary pixels),but need tailored data structures and algorithms in the region tree.
Formally,let us assume the image has p pixels,and we build a hierarchy based on s superpixels (leaves of the tree),and m mergings (different UCM strength values).The cost of computing the area on all regions using the merging-sequence partitions will be the cost of scanning all pixels in these partitions,thus p ·(m +1).In contrast,the cost using the region tree will involve scanning the image once,and then propagating the area values,so p +m ,which is notably faster.
We have built tailored algorithms and data structures to compute the bounding box,perimeter,and neighbors of a region using the region tree representation.
Combinatorial Grouping of Proposals :We can cast object segmentation as selecting some regions in the hierarchy,or in other words,as a combinatorial optimization problem on the hierarchy.To illustrate this principle,Figure 5(a)shows the simpli?ed representation of the hierarchy in Figure 3.Figure 5(b)and (c)show two object proposals,and their representation in the region hierarchy.
Since hierarchies are built taking only low-level fea-tures into account,and do not use semantic information,
7
0.10.20.30.40.50.60.70.80.91Recall
P r e c i s i o n Objects and
Parts
0.10.20.3
0.40.50.60.70.80.91Recall
P r e c i s i o n Fig.4.BSDS500test set.Precision-Recall curves for boundaries
[33](left)and for objects and parts [34](right).The marker on each curve is placed on the Optimal Dataset Scale (ODS).The isolated red asterisks refer to the human performance assessed on the same image and on a swapped image.In the legend,the F measure of the marked point on each curve is presented in brackets.
R 5
R 1
R 2
R 3
R R 9
R 7
R 1
R 2
R 3
R 4
R 8
R 5
R 6
(a)(b)(c)
Fig.5.Object segmentation as combinatorial opti-mization :Examples of objects (b),(c),formed by select-ing regions from a hierarchy (a).
objects will usually not be optimally represented using a single region in the hierarchy.As an example,Figure 5(c)shows the optimum representation of the car,consisting of three regions.
A sensible approach to create object proposals is there-fore to explore the set of n -tuples of regions.The main idea behind MCG is to explore this set ef?ciently,taking advantage of the region tree representation,via the fast computation of region neighbors.
The whole set of tuples,however,is huge,and so it is not feasible to explore it exhaustively.Our approach ranks the proposals using the height of their regions in the tree (UCM strength)and explores the tree from the top,but only down to a certain threshold.To speed the process up,we design a top-down algorithm to compute the region neighbors and thus only compute them down to a certain depth in the tree.
To further improve the results,we not only consider the n -tuples from the resulting Ours-multi hierarchy,
but also the rest of hierarchies computed at different scales.As we will show in the experiments,this diversity signi?cantly improves the proposal results.
Parameter Learning via Pareto Front Optimization :MCG takes a set of diverse hierarchies and computes the n -tuples up to a certain UCM strength.We can interpret the n -tuples from each hierarchy as a ranked list of N i proposals that are put together to create the ?nal set of N p proposals.
At training time,we would like to ?nd,for differ-ent values of N p ,the number of proposals from each ranked list N i such that the joint pool of N p proposals has the best achievable quality.We frame this learning problem as a Pareto front optimization [36],[37]with two con?icting objective functions:number of proposals and achievable quality.At test time,we select a working point on the Pareto front,represented by the N i values,based either on the number of proposals N p we can handle or on the minimum achievable quality our application needs,and we combine the N i top proposals from each hierarchy list.
Formally,assuming R ranked lists L i ,an exhaustive learning algorithm would consider all possible values of the R -tuple {N 1,...,N R },where N i ∈{0,...,|L i |};
adding up to R
1|L i |parameterizations to try,which is intractable in our setting.
Figure 6illustrates the learning process.To reduce the dimensionality of the search space,we start by selecting two ranked lists L 1,L 2(green curves)and we sample the list at S levels of number of proposals (green dots).We then scan the full S 2different parameterizations to
8
combine the proposals from both (blue dots).In other words,we analyze the sets of proposals created by combining the top N 1from L 1(green dots)and the top N 2from L 2.
Fig.6.Pareto front learning :T raining the combinatorial generation of proposals using the Pareto front
The key step of the optimization consists in discarding those parameterizations whose quality point is not in the Pareto front (red curve).(i.e.,those parameterizations that can be substituted by another with better quality with the same number of proposals,or by one with the same quality with less proposals.)We sample the Pareto front to S points and we iterate the process until all the ranked lists are combined.
Each point in the ?nal Pareto front corresponds to a particular parameterization {N 1,...,N R }.At train time,we choose a point on this curve,either at a given number of proposals N c or at the achievable quality we are interested in (black triangle)and store the pa-rameters
N 1,...,N R .At test time,we combine the
N 1,...,N R top proposals from each ranked list.The number of sampled con?gurations using the proposed algorithm is (R ?1)S 2,that is,we have reduced an exponential problem (S R )to a quadratic one.
Regressed Ranking of Proposals :To further reduce the number of proposals,we train a regressor from low-level features,as in [6].Since the proposals are all formed by a set of regions from a reduced set of hierarchies,we focus on features that can be computed ef?ciently in a bottom-up fashion,as explained previously.We compute the following features:
?Size and location :Area and perimeter of the can-didate;area,position,and aspect ratio of the bounding box;and the area balance between the regions in the candidate.
?Shape :Perimeter (and sum of contour strength)divided by the squared root of the area;and area of the region divided by that of the bounding box.
?Contours :Sum of contour strength at the bound-aries,mean contour strength at the boundaries;mini-mum and maximum UCM threshold of appearance and disappearance of the regions forming the candidate.We train a Random Forest using these features to regress the object overlap with the ground truth,and diversify the ranking based on Maximum Marginal Relevance measures [6].We tune the random forest learning on half training set and validating on the other half.For
the ?nal results,we train on the training set and evaluate our proposals on the validation set of Pascal 2012.
7
E XPERIMENTS ON
P ASCAL VOC,SBD,
COCO
section presents our large-scale empirical validation the object proposal algorithm described in the previ-section.We perform experiments in three annotated with a variety of measures that demonstrate state-of-the-art performance of our algorithm.
Datasets and Evaluation Measures :We conduct in the following three annotated datasets:segmentation challenge of Pascal 2012Visual Object Classes (SegVOC12)[38],the Berkeley Semantic Bound-aries Dataset (SBD)[39],and the Microsoft Common Objects in Context (COCO)[40].They all consist in images with annotated objects of different categories.Table 2summarizes the number of images and object instances in each database.
Number of Number of Number of Classes
Images Objects SegVOC122029139847SBD 201203132172COCO
80
123287
910983
T ABLE 2
Sizes of the databases
Regarding the performance metrics,we measure the achievable quality with respect to the number of pro-posals,that is,the quality we would have if an oracle selected the best proposal among the pool.This aligns with the fact that object proposals are a preprocessing step for other algorithms that will represent and classify them.We want,therefore,the achievable quality within the proposals to be as high as possible,while reducing the number of proposals to make the ?nal system as fast as possible.
As a measure of quality of a speci?c object proposal with respect to an annotated object,we will consider the Jaccard index,also known as covering,or overlap,which is de?ned as the size of the intersection of the two pixel sets over the size of their union.
When computing the overall quality for the whole database,we will consider three different metrics.First,we select the best proposal for each annotated instance with respect to J .To compute the Jaccard index at Class level (J c ),we ?rst add all false positive,true positive,and false negative pixels of all best proposals of each class.We then compute a global Jaccard over all pixels of the same class and J c is the mean over classes of this global Jaccard (the segmentation accuracy of Pascal [38]).Since all pixels of a certain class for all the database are considered together in the J c computation,small instances do not affect the result signi?cantly,so J c favors methods focusing on large objects.To avoid this
9
bias,we de?ne the Jaccard index at instance level(J i)as the mean best overlap for all the ground-truth instances in the
database,also known as Best Spatial Support score (BSS)[4].
Computing the mean of the best overlap on all objects, as done by J i,masks the distribution of quality among different objects.As an example,J i=0.5can mean that the algorithm covers half the objects perfectly and completely misses the other half,or can also mean that all the objects are covered exactly at J=0.5.This information might be useful to decide which algorithm to https://www.doczj.com/doc/9911137988.html,puting a histogram of the best overlap would provide very rich information,but then the resulting plot would be3D(number of proposals,bins,and bin counts).Alternatively,we propose to plot different per-centiles of the histogram.
Interestingly,a certain percentile of the histogram of best overlaps consists in computing the number of
objects whose best overlap is above a certain Jaccard threshold,which can be interpreted as the best achiev-able recall of the technique over a certain threshold.We compute the recall at three different thresholds:J=0.5, J=0.7,and J=0.85.
Learning Strategy Evaluation:We?rst estimate the loss in performance due to not sweeping all the possible values of{N1,...,N R}in the combination of proposal lists via the proposed greedy strategy.To do so,we will compare this strategy with the full combination on a reduced problem to make the latter feasible.Speci?cally, we combine the4ranked lists coming from the single-tons at all scales,instead of the full16lists coming from singletons,pairs,triplets,and4-tuples.We also limit the search to20000proposals,further speeding the process up.
In this situation,the mean loss in achievable quality along the full curve of parameterization is J i=0.0002, with a maximum loss of J i=0.004(0.74%)(similar results for J c).In exchange,our proposed learning strat-egy on the full16ranked lists takes about1minute to compute on the training set of SegVOC12,while the singleton-limited full combination takes4days(the full combination would take months).
Combinatorial Grouping:We now evaluate the Pareto front optimization strategy in the training set of SegVOC12.As before,we extract the lists of proposals from the three scales and the multiscale hierarchy,for singletons,pairs,triplets,and4-tuples of regions,leading to16lists,ranked by the minimum UCM strength of the regions forming each proposal.
Figure7shows the Pareto front evolution of J c with respect to the number of proposals for up to1,2,3,and 4regions per proposal(4,8,12,and16lists,respectively) at training time on SegVOC12.As baselines,we plot the raw singletons from Ours-multi,gPb-UCM,and Quadtree.
The improvement of considering the combination of all1-region proposals()from the3scales and the Ours-multi with respect to the raw Ours-multi()
our the raw proposals from the hierarchies
is signi?cant,which corroborates the gain in diversity obtained from hierarchies at different scales.In turn,the addition of2-and3-region proposals(and) noticeably improves the achievable quality.This shows that hierarchies do not get full objects in single regions, which makes sense given that they are built using low-level features only.The improvement when adding4-tuples()is marginal at the number of proposals we are considering.
The red asterisk()marks the selected con?guration
N1,...,N R
in the Pareto front(black triangle in Fig-ure6),which is selected at a practical level of proposals. The red plus sign()represents the set of proposals after removing those duplicate proposals whose overlap leads to a Jaccard higher than0.95.The proposals at this point are the ones that are ranked by the learnt regressor(). Please note that this curve is evaluated on the training set:the?at behavior is not realistic in the test set,as we will observe below.
At test time,we directly combine the learnt
N1,...,N R
proposals from each ranked list and we remove duplicates.In the validation set of SegVOC12, the full set of proposals(i.e.,combining the full16lists) would contain millions of proposals per image.The multiscale combinatorial grouping allows us to reduce the number of proposals to5086with a very high achievable J c of0.84.The regressed ranking allows us to further reduce the number of proposals below this point.
Segmented Proposals:Comparison with State of the Art:We?rst compare our results against those methods that produce segmented object proposals[12], [13],[14],[11],[15],[16],[6],[11],[17],using the imple-mentations from the respective authors.We train MCG on the training set of SegVOC12,and we use the learnt parameters on the validation sets of SegVOC12,SBD,
102
103
104
0.3
0.40.50.60.70.80.9
Number of proposals
J a c c a r d i n d e x a t i n s t a n c e l e v e l (J i )
102
103
104
0.3
0.40.50.60.70.8
0.9
Number of proposals
J a c c a r d i n d e x a t i n s t a n c e l e v e l (J i )
102
103
104
0.3
0.4
0.5
0.6
0.7
0.8
0.9
Number of proposals
J a c c a r d i n d e x a t i n s t a n c e l e v e l (J i )
Fig.8.Object Proposals:Jaccard index at instance level.Results on SegVOC12,SBD,and COCO.
Pascal SegVOC12
102
103
104
0.3
0.40.50.60.70.80.9
Number of proposals
J a c c a r d i n d e x a t c l a s s l e v e l (J c )
SBD
102
103
104
0.30.40.50.60.7
0.80.9
Number of proposals
J a c c a r d i n d e x a t c l a s s l e v e l (J c )
COCO
102
103
104
0.3
0.4
0.5
0.6
0.7
0.8
0.9
Number of proposals
J a c c a r d i n d e x a t c l a s s l e v e l (J c )
Fig.9.Object Proposals:Jaccard index at class level.Results on SegVOC12,SBD,and COCO.and COCO.
Figures 8and 9show the achievable quality at instance level (J i )and class level (J c ),respectively,of all methods on the validation set of SegVOC12,SBD,and COCO.We plot the raw regions of Ours-multi,gPb-UCM,and QuadTree as baselines where available.
We also evaluate a faster single-scale version of MCG (Single-scale Combinatorial Grouping -SCG ),which takes the hierarchy at the native scale only and combines up to 4regions per proposal.This approach decreases the computational load one order of magnitude while keeping competitive results.
At instance level (J i ),MCG proposals (
)signif-icantly outperform the state-of-the-art at all regimes.At class level (J c ),our proposals practically achieve the same quality as RIGOR ()and CPMC ()in SegVOC12.The bigger the database is,the better MCG results are with respect to RIGOR,outperforming all methods in COCO.This shows that our techniques better generalize to unseen images (recall that MCG
is trained only in SegVOC12).Selective Search (SeSe -)is the method with best generalization power,since their achievable quality is almost the same in the three databases,although the huge number of proposals pos-sibly makes it easier.
As commented on the measures description,J i and J c show mean aggregate results,so they can mask the distribution of quality among objects in the database.To gain more insight,Figure 10shows the recall at three different Jaccard levels.First,these plots further highlight how challenging COCO is,since we observe a signi?cant drop in performance,more pronounced than when measured by J i and J c .
Another interesting result comes from observing the evolution of the plots for the three different Jaccard values.Take for instance the performance of GOP ()against MCG-Our ()in SBD.While for J =0.5GOP slightly outperforms MCG,the higher the threshold,the better MCG.Overall,MCG has specially good results at higher J values.In other words,if one looks for
10
10
10
Number of proposals
10
10
10
Number of proposals
101010Number of proposals
Fig.10.Segmented Object Proposals:Recall at different Jaccard levels.Percentage of annotated objects for which there is a proposal whose overlap with the segmented ground-truth shapes (not boxes)is above J =0.5,J =0.7,and J =0.85,for different number of proposals per image.Results on SegVOC12,SBD,and COCO.
Pascal SegVOC12
Number of proposals
Number of proposals
Number of proposals
Fig.11.Bounding-Box Proposals:Recall at different Jaccard levels.Percentage of annotated objects for which there is a bounding box proposal whose overlap with the ground-truth boxes is above J =0.5,J =0.7,and J =0.85,for different number of proposals per image.Results on SegVOC12,SBD,and COCO.proposals of very high accuracy,MCG is the method with highest recall,at all regimes and in all databases.In all measures and databases,SCG ()obtains very competitive results,especially if we take into account that it is 7×faster than MCG,as we will see in next sections.
Boxes Proposals:Comparison with State of the Art :Although focused in providing segmented object proposals,MCG may also be used to provide boxes proposals,by taking the bounding box of the segmented proposals and deduplicating them.We add the state
of the art in boxes proposals [24],[25],[23],and [15]to the comparison.Figure 11shows the recall values of the boxes results when compared to the bounding boxes of the annotated objects,for three different Jaccard thresholds.
While many of the techniques speci?cally tailored to boxes proposals are competitive at J =0.5,their perfor-mance drops signi?cantly at higher Jaccard thresholds.Despite being tailored to segmented proposals,MCG clearly outperforms the state of the art if you look for precise localization of the bounding boxes.Again,
12
SCG is very competitive,especially taking its speed into account.
MCG and SCG Time per Image:Table3shows the time per image of the main steps of our approach, from the raw image to the contours,the hierarchical segmentation,and the proposal generation.All times are computed using a single core on a Linux machine.Our full MCG takes about25s.per image to compute the multiscale hierarchies,and17s.to generate and rank the5038proposals on the validation set of SegVOC12. Our single-scale SCG produces a segmentation hierarchy of better quality than gPb-ucm[18]in less than3seconds and with signi?cant less memory footprint.
Contour Hierarchical Candidate Total
Detection Segmentation Generation
MCG 4.6±1.320.5±5.617.0±9.842.2±14.8
SCG 1.0±0.3 2.7±0.7 2.6±0.4 6.2± 1.1
T ABLE3
Time in seconds per image of MCG and SCG
Table4shows the time-per-image results compared to the rest of state of the art in segmented proposals gen-eration,all run on the same single-core Linux machine.
Proposal
Generation
MCG(Our)42.2±14.8
SCG(Our) 6.2± 1.1
GOP[12] 1.0±0.3
GLS[13]7.9± 1.7
SeSe[11]15.9± 5.2
RIGOR[14]31.6±16.0
CPMC[6]≥120
CI[17]≥120
ShSh[16]≥120
T ABLE4
Time comparison for all considered state-of-the-art techniques that produce segmented proposals.All run on the same single-core Linux machine.
Practical considerations:One of the key aspects of object proposals is the size of the pool they generate. Depending on the application,one may need more preci-sion and thus a bigger pool,or one might need speed and thus a small pool in exchange for some loss of quality. MCG and SCG provide a ranked set of around5000and 2000proposals,respectively,and one can take the N ?rst in case the speci?c application needs a smaller pool. From a practical point of view,this means that one does not need to re-parameterize them for the speci?c needs of a certain application.
In contrast,the techniques that do not provide a ranking of the proposals,need to be re-parameterized to adapt them to a different number of proposals,which is not desirable in practice.
On top of that,the results show that MCG and SCG have outstanding generalization power to unseen images (recall that the results for SBD and COCO have been obtained using the learnt parameters on SegVOC12), meaning that MCG and SCG offer the best chance to obtain competitive results in an unseen database without need to re-train.
Figure12shows some qualitative results on COCO.
8C ONCLUSIONS
We proposed Multiscale Combinatorial Grouping (MCG),a uni?ed approach for bottom-up segmentation and object proposal generation.Our approach produces state-of-the-art contours,hierarchical regions,and object proposals.At its core are a fast eigenvector computation for normalized-cut segmentation and an ef?cient algorithm for combinatorial merging of hierarchical regions.We also present Single-scale Combinatorial Grouping(SCG),a speeded up version of our technique that produces competitive results in under?ve seconds per image.
We perform an extensive validation in BSDS500, SegVOC12,SBD,and COCO,showing the quality,ro-bustness and scalability of MCG.Recently,two inde-pendent studies[41],[42]provided further evidence to the interest of MCG among the current state-of-the-art in object proposal generation.Moreover,our object candidates have already been employed as integral part of high performing recognition systems[43].
In order to promote reproducible research on per-ceptual grouping,all the resources of this project–code,results,and evaluation protocols–are publicly available1.
Acknowledgements:This work has been partly developed in the framework of the project BIGGRAPH-TEC2013-43935-R and the FPU grant AP2008-01164;?-nanced by the Spanish Ministerio de Econom′?a y Compet-itividad,and the European Regional Development Fund (ERDF).This work was partially supported by ONR MURI N000141010933.
R EFERENCES
[1]P.Viola and M.Jones,“Robust real-time face detection,”IJCV,
vol.57,no.2,2004.
[2]N.Dalal and B.Triggs,“Histograms of oriented gradients for
human detection,”in CVPR,2005.
[3]P.Felzenszwalb,R.Girshick,D.McAllester,and D.Ramanan,
“Object detection with discriminatively trained part based mod-els,”TP AMI,vol.32,no.9,2010.
[4]T.Malisiewicz and A.A.Efros,“Improving spatial support for
objects via multiple segmentations,”in BMVC,2007.
[5] C.Gu,J.Lim,P.Arbelaez,and J.Malik,“Recognition using
regions,”in CVPR,2009.
[6]J.Carreira and C.Sminchisescu,“CPMC:Automatic object
segmentation using constrained parametric min-cuts,”TP AMI, vol.34,no.7,pp.1312–1328,2012.
https://www.doczj.com/doc/9911137988.html,/Research/Projects/CS/vision/grouping/mcg/
13 Fig.12.COCO Qualitative Results:Image,ground truth,multi-scale UCM and best MCG proposals among the500
best ranked.(More qualitative examples in the supplemental material.)
[7]P.Arbel′a ez,B.Hariharan,C.Gu,S.Gupta,L.Bourdev,and
J.Malik,“Semantic segmentation using regions and parts,”in
CVPR,2012.
[8]J.Carreira,R.Caseiro,J.Batista,and C.Sminchisescu,“Semantic
segmentation with second-order pooling,”in ECCV,2012.
[9]R.Girshick,J.Donahue,T.Darrell,and J.Malik,“Rich feature
hierarchies for accurate object detection and semantic segmenta-
tion,”in CVPR,2014.
[10]N.Zhang,J.Donahue,R.Girshick,and T.Darrell,“Part-based
r-cnns for?ne-grained category detection,”in ECCV,2014.
[11]J.R.R.Uijlings,K.E.A.van de Sande,T.Gevers,and A.W.M.
Smeulders,“Selective search for object recognition,”IJCV,vol.
104,no.2,pp.154–171,2013.
[12]P.Kr¨a henb¨uhl and V.Koltun,“Geodesic object proposals,”in
ECCV,2014.
[13]P.Rantalankila,J.Kannala,and E.Rahtu,“Generating object
segmentation proposals using global and local search,”in CVPR,
2014.
[14] A.Humayun,F.Li,and J.M.Rehg,“RIGOR:Recycling Inference
in Graph Cuts for generating Object Regions,”in CVPR,2014.
[15] B.Alexe,T.Deselaers,and V.Ferrari,“Measuring the objectness
of image windows,”TP AMI,vol.34,pp.2189–2202,2012.
[16]J.Kim and K.Grauman,“Shape sharing for object segmentation,”
in ECCV,2012.
[17]I.Endres and D.Hoiem,“Category-independent object proposals
with diverse ranking,”TP AMI,vol.36,no.2,pp.222–234,2014.
[18]P.Arbel′a ez,M.Maire,C.C.Fowlkes,and J.Malik,“Contour
detection and hierarchical image segmentation,”TP AMI,vol.33,
no.5,pp.898–916,2011.
[19]P.F.Felzenszwalb and D.P.Huttenlocher,“Ef?cient graph-based
image segmentation,”IJCV,vol.59,p.2004,2004.
[20]X.Ren and L.Bo,“Discriminatively trained sparse code gradients
for contour detection,”in NIPS,2012.
[21] C.J.Taylor,“Towards fast and accurate segmentation,”CVPR,
2013.
[22]M.Maire and S.X.Yu,“Progressive multigrid eigensolvers for
multiscale spectral segmentation,”ICCV,2013.
[23]S.Man′e n,M.Guillaumin,and L.Van Gool,“Prime Object Pro-
posals with Randomized Prim’s Algorithm,”in ICCV,2013.
[24] C.L.Zitnick and P.Doll′a r,“Edge boxes:Locating object proposals
from edges,”in ECCV,2014.
[25]M.-M.Cheng,Z.Zhang,W.-Y.Lin,and P.H.S.Torr,“BING:
Binarized normed gradients for objectness estimation at300fps,”
in CVPR,2014.
[26] D.Hoiem,A.Efros,and M.Hebert,“Recovering occlusion bound-
aries from an image,”IJCV,vol.91,no.3,pp.328–346,2011.
[27]Z.Ren and G.Shakhnarovich,“Image segmentation by cascaded
region agglomeration,”in CVPR,2013.
[28] D.Weiss and B.Taskar,“Scalpel:Segmentation cascades with
localized priors and ef?cient learning,”in CVPR,2013.
[29]L.Najman and M.Schmitt,“Geodesic saliency of watershed
contours and hierarchical segmentation,”TP AMI,vol.18,no.12,
pp.1163–1173,1996.
[30]P.Arbel′a ez,“Boundary extraction in natural images using ultra-
metric contour maps,”in POCV,June2006.
[31] D.Martin,C.Fowlkes,and J.Malik,“Learning to detect natural
image boundaries using local brightness,color and texture cues,”
TP AMI,vol.26,no.5,pp.530–549,2004.
[32]P.Doll′a r and C.Zitnick,“Structured forests for fast edge detec-
tion,”ICCV,2013.
[33]https://www.doczj.com/doc/9911137988.html,/Research/
Projects/CS/vision/grouping/resources.html.
14
[34]J.Pont-Tuset and F.Marques,“Measures and meta-measures for
the supervised evaluation of image segmentation,”in CVPR ,2013.[35]M.Maire,S.X.Yu,and P .Perona,“Hierarchical scene annotation,”
in BMVC ,2013.
[36]M.Everingham,H.Muller,and B.Thomas,“Evaluating image
segmentation algorithms using the pareto front,”in ECCV ,2006.[37]M.Ehrgott,Multicriteria optimization .Springer,2005.
[38]M.Everingham,L.Van Gool, C.K.I.Williams,J.Winn,
and A.Zisserman,“The PASCAL Visual Object Classes Challenge 2012(VOC2012)Results,”https://www.doczj.com/doc/9911137988.html,/challenges/VOC/voc2012/workshop/index.html.[39] B.Hariharan,P .Arbelaez,L.Bourdev,S.Maji,and J.Malik,
“Semantic contours from inverse detectors,”in ICCV ,2011.
[40]T.-Y.Lin,M.Maire,S.Belongie,J.Hays,P .Perona,D.Ramanan,
P .Doll′a r,and C.Zitnick,“Microsoft COCO:Common Objects in Context,”in ECCV ,2014.
[41]J.Hosang,R.Benenson,and B.Schiele,“How good are detection
proposals,really?”in BMVC ,2014.[42]J.Hosang,R.Benenson,P .Doll′a r,and B.Schiele,“What makes
for effective detection proposals?”in arXiv:1502.05082,2015.[43] B.Hariharan,P .Arbel′a ez,R.Girshick,and J.Malik,“Simultane-ous detection and segmentation,”in ECCV ,
2014.
Jordi Pont-Tuset is a post-doctoral researcher at ETHZ,Switzerland,in Prof.Luc Van Gool’s computer vision group (2015).He received the degree in Mathematics in 2008,the degree in Electrical Engineering in 2008,the M.Sc.in Research on Information and Communication T echnologies in 2010,and the Ph.D in 2014;all from the Universitat Polit`ecnica de Catalunya,BarcelonaT ech (UPC).He worked at Disney Re-search,Z¨urich
(2014).
Pablo Arbel′aez received a PhD with honors in Applied Mathematics from the Universite Paris-Dauphine in 2005.He was a Research Scientist with the Computer Vision group at UC Berke-ley from 2007to 2014.He currently holds a faculty position at Universidad de los Andes in Colombia.His research interests are in com-puter vision,where he has worked on a number of problems,including perceptual grouping,ob-ject recognition and the analysis of biomedical
images.
Jonathan T.Barron is a senior research sci-entist at Google,working on computer vision
and computational photography.He received a PhD in Computer Science from the University of California,Berkeley in 2013,where he was advised by Jitendra Malik,and he received a Honours BSc in Computer Science from the University of T oronto in 2007.His research inter-ests include computer vision,machine learning,computational photography,shape reconstruc-tion,and biological image analysis.He received
a National Science Foundation Graduate Research Fellowship in 2009,and the C.V .Ramamoorthy Distinguished Research Award in
2013.Ferran Marques received the degree in Elec-trical Engineering and the Ph.D.from the Uni-versitat Polit`ecnica de Catalunya,BarcelonaT -ech (UPC),where he is currently Professor at the department of Signal Theory and Commu-nications.In the term 2002-2004,he served as President of the European Association for Signal Processing (EURASIP).He has served as Associate Editor of the IEEE T ransactions on Image Processing (2009-2012)and as Area Editor for Signal Processing:Image Communi-cation,Elsevier (2010-2014).In 2011,he received the Jaume Vicens Vives distinction for University T eaching Quality.Currently,he serves as Dean of the Electrical Engineering School (ETSETB-T elecomBCN)at UPC.He has published over 150conference and journal papers,2books,and holds 4international
patents.
Jitendra Malik is Arthur J.Chick Professor in the Department of Electrical Engineering and Computer Science at the University of California at Berkeley,where he also holds appointments in vision science and cognitive science.He re-ceived the PhD degree in Computer Science from Stanford University in 1985.In January 1986,he joined UC Berkeley as a faculty mem-ber in the EECS department where he served as Chair of the Computer Science Division during 2002-2006,and of the Department of EECS dur-ing 2004-2006.Jitendra Malik’s group has worked on computer vision,computational modeling of biological vision,computer graphics and machine learning.Several well-known concepts and algorithms arose in this work,such as anisotropic diffusion,normalized cuts,high dynamic range imaging,shape contexts and poselets.According to Google Scholar,ten of his papers have received more than a thousand citations each.He has graduated 33PhD students.Jitendra was awarded the Longuet-Higgins Award for “A Contribution that has Stood the T est of Time”twice,in 2007and 2008.He is a Fellow of the IEEE and the ACM,a member of the National Academy of Engineering,and a fellow of the American Academy of Arts and Sciences.He received the P AMI Distinguished Researcher Award in computer vision in 2013and the K.S.Fu prize in 2014.
FPA性格色彩简易测试 注:请选择让你“最自然的”、“最真实的”反应,而不是思考“最好的”、“最适合的”或者“最应该的”。换句话讲,你回答的问题是“我是谁”,而不是“我应该是谁”或“我想是谁”。 一、领取你的性格色彩(测试) 说明:每题选出最符合你的句子,每组只选一个答案,做完全部三十道题目后,按提示计算。 1、关于人生观,我的内心其实是: A 人生体验越多越好,所以想法极多。 B 深度比宽度在人生中更重要,目标要谨慎,一旦确定就坚持到底。 C 无论做什么,人生必须得有所成。 D 有生就有死,不要太辛苦,活着就好。 2、如果爬山旅游,在下山回来的路线选择上,我更在乎: A 要好玩有趣,不愿重复,所以宁愿走新路线。 B 要安全稳妥,担心危险,所以宁愿走原路线。 C 要挑战自我,喜欢冒险,所以宁愿走新路线。 D 要方便省心,害怕麻烦,所以宁愿走原路线。 3、通常在表达一件事情上,别人认为我: A 总是给人感受到强烈印象。 B 总是表述极其准确。 C 总能围绕最终目的。 D 总能让周围人很舒服。 4、在生命多数时候,我其实更加希望: A 刺激 B 安全 C 挑战 D 稳定 5、我认为自己在情感上的基本特点是: A 情绪多变,经常情绪波动。 B 外表自我抑制强,但内心感情起伏大,一旦挫伤难以平复。 C 感情不拖泥带水,较直接,一旦不稳定,容易发怒。 D 天性四平八稳。 6、我认为自己在整个人生中,除了工作以外,在控制欲上面,我: A 没有控制欲,有感染带动他人的欲望,但自控能力不强。 B 用规则来保持我对自己的控制和对他人的要求。 C 内心有控制欲,希望别人服从我。 D 不去管别人,也不愿意别人来管我。 7、当与情人交往时,我倾向于着重: A 一起做喜欢的事情,对他的爱意溢于言表。 B 体贴入微,对他的需求极其敏感。 C 沟通重要的想法,尽情地辩论事情。 D 包容另一半所有不同观点。
浅析四种不同性格色彩及自我性格剖析读《色眼识人——FPA性格色彩解读》总结 不得不说这是本挺不错的书,5月23日接触这本书之前,一直在啃那部大块头《梦的解析》,可能是由于智商原因吧,实觉那本书过于晦涩难懂。所以虽然草老师说读书要专一,一本书读完之前不要翻开第二本书,但是看了几页之后还是令我果断的将《梦的解析》搁置在一边,读的过程中也能钻的进去,一直在做笔记划重点。 只是偶然间突发奇想想写个读书总结,来证明一下我并不是天天睡觉什么都没干,大学生毕竟还是要有自己的思想,同时也借着这个机会对这自己的性格做一下分析。 书中提出概念,将人的不同性格定义为红、蓝、黄、绿四种不同的颜色。红色自由快乐,杂乱无章;蓝色完美谨慎,死板固执;黄色果断坚定,霸道蛮横;绿色和谐宽容,软弱拖拉……当然,绝大多数人的性格都是复杂的,同时将上述一种或者两种甚至是多种性格融为一身。正如世界上没有两片完全相同的雪花,每个人都是独一无二的,四种性格所占所占比例不同,也组合出了丰富多样的性格。 以下是对四种性格的描述: (很多内容均为个人观点,如有冲突,请遵从原著。) 红色性格: 红色好玩好动,像毫不停歇的永动机。 红色天生拥有着阳光心态,积极快乐,嘻嘻哈哈喜欢开玩笑,对于事物总能迅速的看到美好的一面。 红色天性带着表现欲,渴望受到他人的关注,受到他人的赞赏和鼓励,所以红色带着天生的感染力和表现力。 红色拥有好奇心和一颗永远不会长大的童心,可以用童心去欣赏一切,这种态度使得他们不会被复杂化,缺少心机,简单真诚。 红色情感丰富,热情澎湃,喜欢交友,乐于助人,更能迅速融入陌生的环境。是社交场合的开心果,总是让人充满乐趣被他们的活泼所感染。 红色内心深处不甘寂寞,永远在追寻新的兴奋热点以及新奇的活法,最有能力尝试不同的人生,最擅长一波接一波地想出新奇的点子和计划。 红色不记仇苦有错就认,前脚吵架后脚忘,只要不是做了什么特别伤害他们的事,随着时间的推移,红色都会忘记。他们可能上一分钟还在与你面红耳赤,下一分钟发现自己错了就跑来向你认错,让人哭笑不得。 红色性格缺点: 红色善变,反复无常,你永远无法把他的话当真。恋爱中的红色说出“我爱你”所代表的意思也只是“我此刻是爱你的,至于以后怎么样,以后再说。”
《FPA性格色彩入门,跟乐嘉色眼识人》经典语录 大猪妍 1.人只有不断的要求和批评才可以进步 2.不是性格决定命运,而是个性决定命运 3.动机就是“为什么做”,行为是“做什么” 4.性格是天生的,就是原本的我;个性是后天的,就是现在的我5.动机无法改变,行为是可以训练的 6.醉过方知酒浓,爱过方知情重 7.红色的爱是博爱,蓝色的爱是专爱 8.唯独红色,他们的开放,透明,真诚让他们给人温暖 9.红色不仅关注自己的创新,同时对他们的创新给予极高的评价和认可,从而刺激了阻止内部更多的创意涌现 10.舞台上很多高手也许出自于红色,但真正的大师一级的人物是蓝色的 11.波特曼:我总是自行选择我要做的事,父母会给我一些意见与建议,但最终决定是由我们自己作 12.实际行动的证明才是有意义的 13.蓝色是高度可靠的朋友 14.要么不做,要做就做到最好 15.红色喜欢变化中新奇的,不确定的快乐,而蓝色喜欢计划中程序稳定的安全感 16.学会理解并尊重他人的思想和他人的感受,学会理解别人
17.唯有伟大的人才能成就伟大的事,他们之所以伟大,是因为决心要做出伟大的事 18.迈向成功的七大要素:只重结果,用于面对失败,明智选择合作伙伴,毅力中见品格,无论对错速决定,设置可达到的目标,努力向上,超越,再继续向前 19.进攻就是最好的防守 20.Keep your friend close ,keep your enemies closer 21.坦率:不懂变通,不懂得含蓄,不懂得体谅别人的感受22.只要有什么新想法,立刻就会付诸实行 23.在绿色环境中长大的孩子,身心健康,个个活出了自我24.红色的优势无限的兴趣,但博而不精 25.红色是乐于分享的本性 26.闲谈莫论人非,闭门多思己过 27.蓝色很爱分析,也很擅长分析 28.仁爱是善良,是人类最起码的道德 29.最重要的是学会接纳真实的自己 30.最重要的一点,对自己真实,就像黑夜和白昼,你不能对任何人虚假不实 31.最终决定我们生命本质的并不是性格,而大部分取决于我们的个性 32.切记:至少性格,品德,能力三者综合,才能全面评价一个人33.问题的关键不在于改变,关键在于修炼
FPA性格色彩测试题目: 1.关于人生观,我的内心其实是: A 希望能够有尽量多的人生体验,所以会有非常多样化的想法。 B在小心合理的基础上,谨慎地确定自己的目标,一旦确定会坚定不移地去做。 C更加注重的是取得一切有可能的成就。 D宁愿剔除风险而享受平静或现状。 2.如果爬山旅游,在下山回来的路线选择上,我更在乎: A好玩有趣,所以宁愿新路线回巢。 B安全稳妥,所以宁愿原路线返回。 C挑战困难,所以宁愿新路线回巢。 D方便省心,所以宁愿原路线返回。 3. 通常在表达一件事情上,我更看重: A说话给对方感受到的强烈印象。 B说话表述的准确程度。 C说话所能达到的最终目标。 D说话后周围的人际感受是否舒服。 4. 在生命的大多数时候,我的内心其实更加欣喜于和希望多些: A刺激。B安全。C挑战。D稳定。 5. 我认为自己在情感上的基本特点是: A情绪多变,经常情绪波动。 B外表上自我抑制能力强,但内心感情起伏极大,一旦挫伤难以平复。 C感情不拖泥带水,较为直接,只是一旦不稳定,容易激动和发怒。 D天性情绪四平八稳。 6. 我认为自己在整个人生中,除了工作以外,在控制欲上面,我: A没有控制欲,只有感染带动他人的欲望,但自控能力不算强。 B用规则来保持我对自己的控制和对他人的要求。 C内心是有控制欲和希望别人服从我的。 D不会有任何兴趣去影响别人,也不愿意别人来管控我。 7. 当与情人交往时,我倾向于着重: A兴趣上的相容性,一起做喜欢的事情,对他的爱意溢于言表。 B思想上的相容性,体贴入微,对他的需求很敏感。 C智慧上的相容性,沟通重要的想法,客观地讨论辩论事情。 D和谐上的相容性,包容理解另一半的不同观点。 8. 在人际交往时,我: A心态开放,可以快速建立起友谊和人际关系。 B非常审慎缓慢地进入,一旦认为是朋友,便长久地维持。 C希望在人际关系中占据主导地位。 D顺其自然,不温不火,相对被动。 9. 我认为自己大多数时候更是: A感情丰富的人。B思路清晰的人。C办事麻利的人。D心态平静的人。 10. 通常我完成任务的方式是: A经常会赶在最后期限前完成。 B自己做,精确地做,不要麻烦别人。 C先做,快速做。 D使用传统的方法,需要时从他人处得到帮忙。 11. 如果有人深深惹恼我时,我: A我会避免摊牌,因为那还不到那个地步,那个人多行不义必自毙,或者自己再去找新朋友。B深深感到愤怒,如此之深怎可忘记?我会牢记,同时未来完全避开那个家伙。 C会火冒三丈,并且内心期望有机会狠狠地回应打击。 D内心感到受伤,认为没有原谅的可能,可最终很多时候还是会原谅对方。 12. 在人际关系中,我最在意的是: A 得到他人的赞美和欢迎。 B得到他人的理解和欣赏。 C得到他人的感激和尊敬。
性格色彩的内部都有一个相对应的核心动机,所谓动机就是“爲什麽做”行爲就是“做什麽” 红色的动机是——快乐 蓝色的动机是——完美 黄色的动机是——成就 绿色的动机是——稳定 红色情感丰富且外露 蓝色情感细腻且内敛 黄色追求目标就是他的命根子 绿色温和平顺,随波逐流 红色——快乐的制造者 蓝色——最佳的执行者 黄色——强大的推动者 绿色——和谐的润滑剂 红黄蓝绿一起看电视 红色是感性的,看电视时他们会被剧情感动 蓝色是感性的,衹是不会容易流露出来 黄色是理性的,假的,有什麽好哭的 绿色也是理性的,但他们从不发火,也不责备他人 感性:容易被情绪和情感所影响 理性:不容易被情绪和情感所影响 性格色彩的优势和过当 红色的优势 红色有着阳光一样的积极乐观心态,红色以喜悦拥抱每一件事情,开朗热情,朋友遍天下,在对朋友的定义上,红色秉承着:普天之下,莫非我友乐于助人,有着好了伤疤就忘了疼的不记仇心态 红色的过当 聒噪咋呼,惹人烦厌口无遮拦,缺少分寸,没话找话,说话不经大脑思考,三八气质和传播秘密,情绪波动,要死要活,随意性强,变化无常,钟情计划无用论,不限还生命中被什麽约束,因此内心做事宁愿不归还而临时应变 蓝色的优势 思想深邃,独立思考,不追随潮流,尊重自己的主见和思考问题上的深度 蓝色是完美主义者,骨子里他们期待做得更好 情感细腻,体贴入微,蓝色带给伴侣感动之处就是你不记得的事情,他都会记得,如果蓝色关怀一个人,他会试图去了解你,铜镲你,爲你做需要做的事情,不屑于用言语来表达内心的情感。 蓝色尊重道德规范和秩序,面对痛苦的情况下,轻易不会出头,宁可才去牺牲自己的方式来解决 蓝色喜欢收拾东西,喜欢把东西摆放得整整齐齐,喜欢准确,任何值得做的事情,必须做到最好。 蓝色的过当 蓝色是最喜欢抱怨的性格,与生俱来的消极思维,配合上喋喋不休,好悲观和担忧,什麽是事情都总使坏处去想,做起事来慎重,在行爲上容易呈现优柔寡断、忧心忡忡,畏首畏尾,踟蹰不前的特点
FPA性格色彩解读 1. 关于人生观,我的内心其实是: A 希望能够有尽量多的人生体验,所以会有非常多样化的想法。 B 在小心合理的基础上,谨慎地确定自己的目标,一旦确定会坚定不移地去做。 C 更加注重的是取得一切有可能的成就。 D 宁愿剔除风险而享受平静或现状。 2. 如果爬山旅游,在下山回来的路线选择上,我更在乎: A 好玩有趣,所以宁愿新路线回巢。 B 安全稳妥,所以宁愿原路线返回。 C 挑战困难,所以宁愿新路线回巢。 D 方便省心,所以宁愿原路线返回。 3. 通常在表达一件事情上,我更看重: A 说话给对方感受到的强烈印象。 B 说话表述的准确程度。 C 说话所能达到的最终目标。 D 说话后周围的人际感受是否舒服。 4. 在生命的大多数时候,我的内心其实更加欣喜于和希望多些: A 刺激。 B 安全。 C 挑战。 D 稳定。
5. 我认为自己在情感上的基本特点是: A 情绪多变,经常情绪波动。 B 外表上自我抑制能力强,但内心感情起伏极大,一旦挫伤难以平复。 C 感情不拖泥带水,较为直接,只是一旦不稳定,容易激动和发怒。 D 天性情绪四平八稳。 6. 我认为自己在整个人生中,除了工作以外,在控制欲上面,我: A 没有控制欲,只有感染带动他人的欲望,但自控能力不算强。 B 用规则来保持我对自己的控制和对他人的要求。 C 内心是有控制欲和希望别人服从我的。 D 不会有任何兴趣去影响别人,也不愿意别人来管控我。 7. 当与情人交往时,我倾向于着重: A 兴趣上的相容性,一起做喜欢的事情,对他的爱意溢于言表。 B 思想上的相容性,体贴入微,对他的需求很敏感。 C 智慧上的相容性,沟通重要的想法,客观地讨论辩论事情。 D 和谐上的相容性,包容理解另一半的不同观点。 8. 在人际交往时,我: A 心态开放,可以快速建立起友谊和人际关系。 B 非常审慎缓慢地进入,一旦认为是朋友,便长久地维持。 C 希望在人际关系中占据主导地位。 D 顺其自然,不温不火,相对被动。 9. 我认为自己大多数时候更是: A 感情丰富的人。 B 思路清晰的人。 C 办事麻利的人。 D 心态平静的人。
FPA性格色彩之红色性格 优势 1.阳光心态,积极快乐 红色发明了飞机,蓝色发明了降落伞.红色发明了游艇,蓝色发明了救生圈.红色建造了高楼,蓝色生产了救火栓.红色发射了飞船,蓝色办了保险公司.如果说黄色的正面思考更加来源于他们"不服输"的动机,更加侧重在解决问题上.那么,红色的正面思考,更多地是因为他们天性习惯于"向往快乐和美好'的动机,更加侧重在精神层面上的鼓励和暗示. 红色以喜悦拥抱每一件事情.健康的红色能在每件事情中看到美好的一面,即使是他们不理解或未曾思考过的事物都能使他们快乐.生命的黑暗和死亡的阴影,都无法令他们忧虑.奇妙的是,当他们对生命抱以开放和接受的态度而不苛求什么时,生命所带给他们的意义却更加丰富. 2.激情澎湃,梦想万岁 一种有内而外的感性动物.红色具备"生命的激情",为人感性,情感上高度丰富.黄色的现实主义,在梦想中更加注重的是成功.蓝色的古典主义,小心合理地判定自己的梦想.绿色的稳定主义,更加宁愿不冒风险安于现状.红色的浪漫主义,更加看重的是人生的体验. 3.热情开朗,喜欢交友 字典里没有"陌生"这两个字. 在对于朋友的定义上,蓝色秉持的是"人生得一知己足矣!"的人生哲学.红色则更加宁愿是"普天之下,莫非我友"的人生态度.对于大多销售人员来讲,红色早期上手更快,因为他们的人际关系富有宽度但偏浅.而蓝色在早期开拓不力,完全是因为他们在拓展人际关系的宽度上有着自己的困难,他们的人际关系是窄而深的路径. 红色把幸福与快乐视为人生的目标.由于他们对事情总有很高的兴致,因此他们是令人愉快的伙伴.而且他们的活力与热情具有感染力,能够辐射到周围,和这样的人相处时,总是充满乐趣而且容易被他们活泼的精神所感动. 4.童心未泯,富有趣味 虽然红色也会被一些事物困扰,但他们对自由的强烈的渴望,将本能地分辨出包袱并且毫不犹豫地甩开它. 红色天性里对于快乐的向往,让他们可以用童心来欣赏一切,这种生活态度和哲学,将使他们不会复杂化.他们最懂得享受生命,不管他们从事的是什么,即便正在苦干,也显得似乎乐在其中,他们过日子秉持的信心就是---好的还没有到来. 5.乐于助人,不记愁苦
FPA性格色彩之绿色性格 1、中庸之道,稳定低调 如果说,红色给我们生活的激情和快乐,蓝色给我们稳重和信任,而黄色给我们勇气和坚定。无论是谁,当我们和绿色相处的时候,我们感受到的是轻松,自然,没有压力。 红色:睡不着便拼命给朋友电话或者短信。蓝色:睡不着辗转反侧。黄色:睡不着便不睡,爬起来工作。绿色:睡不着眯着。 2、乐知天命,与世无争 黄色有着活跃的推动力,然而由于他们的强势却树敌不少。等到真正选择领导的时候,最高阶层和民众往往会对那些没有敌人的绿色情有独钟。 绿色的快乐是因为计较的少。 3、毕生无火,巧卸冲突 红色具备"选择性遗忘",他们可以选择性地忘记那些痛苦的记忆,从而自己的记忆体中一直保存着美好与快乐。绿色具备"选择性倾听",让绿色将其他性格无法忍受的冲突回避,只选择听让自己心情舒畅的话。 4、镇定自若,处事不惊 5、天性宽容,耐心柔和 6、笑遍天涯,冷面幽默 兰色是黑色幽默。黄色是硬幽默。红色是热幽默。绿色是冷幽默。
7、先人后己,与取先予 8、领导风格,以人为本 @绿色的天然优势 作为个体 爱静不爱动,有温柔祥和的吸引力和宁静愉悦的气质和善的天性,做人厚道 追求人际关系的和谐 奉行中庸之道,为人稳定低调 遇事以不变应万变,镇定自若 知足常乐,心态轻松 追求平淡的幸福生活 有松弛感,能融入所有的环境和场合 从不发火,温和,谦和,平和 做人懂得"得饶人处且饶人" 追求简单随意的生活方式 沟通特点 以柔克刚,不战而屈人之兵 避免冲突,注重双赢 心平气和且慢条斯理 善于接纳他人意见 最佳的倾听者,极具耐心 擅长让别人感觉舒适 有自然和不经意的冷幽默 松弛大度,不急不徐 作为朋友 从无攻击性 富有同情心和关心 宽恕他人对自己的伤害 能接纳所有不同性格的人 和善的天性及圆滑的手腕 对友情的要求不严苛 处处为别人考虑,不吝付出
1、关于人生观,我的内心其实是: A 人生体验越多越好,所以想法极多。 B 深度比宽度在人生中更重要,目标要谨慎,一旦确定就坚持到底。 C 无论做什么,人生必须得有所成。 D 有生就有死,不要太辛苦,活着就好。 2、如果爬山旅游,在下山回来的路线选择上,我更在乎: A 要好玩有趣,不愿重复,所以宁愿走新路线。 B 要安全稳妥,担心危险,所以宁愿走原路线。 C 要挑战自我,喜欢冒险,所以宁愿走新路线。 D 要方便省心,害怕麻烦,所以宁愿走原路线。 3、在表达一件事情上,别人认为我: A 总是给人感受到强烈印象。 B 总是表述极其准确。 C 总能围绕最终目的。 D 总能让周围人很舒服。 4、在生命多数时候,我其实更加希望: A 刺激。 B 安全。 C 挑战。 D 稳定。 5、我认为自己在情感上的基本特点是: A 情绪多变,经常情绪波动。 B 外表自我抑制强,但内心感情起伏大,一旦挫伤难以平复。 C 感情不拖泥带水,较直接,一旦不稳定,容易发怒。 D 天性四平八稳。 6、我认为自己在整个人生中,除了工作以外,在控制欲上面,我: A 没有控制欲,有感染带动他人的欲望,但自控能力不算强。
B 用规则来保持我对自己的控制和对他人的要求。 C 内心有控制欲、希望别人服从我。 D 不去管别人,也不愿意别人来管我。 7、当与情人交往时,我倾向于着重: A 一起做喜欢的事情,对他的爱意溢于言表。 B 体贴人微,对他的需求极其敏感。 C 沟通重要的想法,尽情地辩论事情。 D 包容另一半所有的不同观点。 8、在人际交往时,我: A 心态开放,可以快速建立起人际关系。 B 非常审慎缓慢地进人,一旦认为是朋友便会长久。 C 希望在人际关系中占据主导地位。 D 顺其自然,不温不火,相对被动。 9、我认为自己为人更是: A 感情丰富。 B 思路清晰。 C 做事直接。 D 为人温和。 10、通常我完成任务的方式是: A 经常是赶在最后期限前的一刻完成。 B 自己精确地做,不麻烦别人。 C 最快速做完,再找下一个任务。 D 该怎么做就怎么做,需要时从他人处得到帮忙。 11、如果有人深深惹恼我时,我 A 内心受伤,认为不可能原谅,但最终还是会原谅对方。 B 如此之深的愤怒不会忘记,同时未来完全避开那个家伙。 C 火冒三丈,内心期望有机会狠狠地回应。 D 避免摊牌,因为还不到那个地步。
fpa性格色彩测试超全解析 下面就给众性格色彩爱好者提供PFA性格色彩测试题,在这里需要强调的是PFA性格色彩研究中心是用“红、蓝、黄、绿”四色代替人的性格类型,分别对应于泰勒·哈特曼博士的“黄、蓝、红、白”四色性格。不管哪种表达方法,只要可以借助一幅幅美妙生动的性格色彩密码来解析多变的人生;通过对“性格色彩密码”的解读,帮助你学会以洞悉自己的人性,从而掌控属于自己的人生,加以修炼成为一个真正优秀卓越的你,改变原本就不属于你的坏命运。 ·测试指导语 选择答案时,请注意以下事项: * 选择最能符合你的选项。 * 所有问题的答案没有好坏或对错之分,先完成对你较容易选择的题目,困难的随后再选,不要停顿。 * 请选择让你“最自然的”“最舒服的”反应,而非“最好的”“最适合的”。换句话讲,你回答的问题是“我是谁”,而不是“我该是谁”或“我想是谁”。·本次测试共30 题 1、我认为自己除了工作外,在控制欲上面,我: A、没有控制欲,只有感染带动他人的欲望,但自控能力不算强。 B、用规则来保持我对自己的控制和对他人的要求。 C、内心是有控制欲和希望别人服从我的。 D、没兴趣影响别人,也不愿别人来控制我。 2、当与情人交往时,我最希望对方: A、经常赞美我,让我享受开心、被关怀且又有一定自由。 B、可随时默契到我内心所想,对我的需求极其敏丄感。 C、得到对方的认可,我是正确的并且我对其是有价值的。 D、尊重并且相处静谧的。 3、在人际交往时,我: A、本质上还是认为与人交往比长时间独处是有乐趣的。 B、非常审慎缓慢地进入,常会被人认为容易有距离感。 C、希望在人际关系中占据主导地位。 D、顺其自然,不温不火,相对被动。 4. 我做事情,经常: A、缺少长性,不喜欢长期做相同无变化的事情。
FPA性格色彩测试及答案 ?请选择让你“最自然的”、“最真实的”、“最舒服的”反应,而不是思考“最好的”、“最适合的”、“最应该的”。 ?每组只选一个答案,在选项前的小方块上打钩。 ?先做对你来讲比较容易的题目,较困难的随后选择,但不要停顿。 ?所有问题的答案没有对错或好坏之分,请不要犹豫地确定你的答案。 1.关于人生观,我的内心其实是: ?A、希望能够有尽量多的人生体验,所以会有多样化的想法。 ?B、在合理的基础上,谨慎确定目标,一旦确定会坚定不移地去做。 ?C、更加注重的是取得一切有可能的成就。 ?D、宁愿删除风险而享受平静或现状 2.如果爬山旅游,在下山回来的路线选择上,我更在乎: ?A、好玩有趣,所以宁愿新路线回巢。 ?B、安全稳妥,所以宁愿原路线返回。 ?C、挑战困难,所以宁愿新路线回巢。 ?D、方便省心,所以宁愿原路线返回。 3.通常在表达一个观点时,我更看重: ?A、感觉效果,有时可能会显得夸张。 ?B、描述精确,有时可能过于冗(rong)长。 ?C、达成结果,有时可能太直接让别人不高兴。 ?D、人际感受,有时可能会不好意思讲真话。
4.在大多数时候,我的内心更想要: ?A、刺激。经常冒出新点子,想做就做,喜欢与众不同。 ?B、安全。头脑冷静,不易冲动。 ?C、挑战。生命中竞赛随处可见,有强烈的“赢”的欲望。 ?D、稳定。满足自己所拥有的,很少羡慕人。 5.我认为自己在感情上的基本特点是 ?A、情绪多变,经常波动。 ?B、外表自我抑制能力强,但内心感情起伏大,一旦挫伤难以平复。?C、感情不拖泥带水,只是一旦不稳定,容易激动和发怒 ?D、天性情绪四平八稳。 6.我认为我自己除了工作外,在控制欲上面,我: ?A、没有控制欲,只有感染带动他人的欲望,但自控能力不算强。?B、用规则来保持自我控制和对他人的要求。 ?C、内心是有控制欲和希望别人服从我的。 ?D、没兴趣影响别人,也不愿别人来控制我。 7.当与情人交往时,我最希望对方: ?A、经常赞美我,让我非常开心,被关怀且自由。 ?B、可猜到我内心所想,对我的需求极其敏感。 ?C、认可我,我是对的且有价值的。 ?D、尊重我并且相处静怡的。 8.在人际交往时,我: ?A、喜欢交很多朋友,与人交往很有趣。
FPA性格色彩演讲稿 大家好,我是杭荣盼(我是一位热衷于性格分析的“送奶工”,是12级信息技术系阳光心协的会长)欢迎大家来到FPA 性格色彩学演讲课堂,FPA性格色彩学是乐嘉老师,作为中国性格研究中心的创办人,他将性格分析的应用从领导,管理,销售,客服,招聘,沟通,团队延伸至心理咨询,婚恋情感,亲子关系,学校教育,个人成长等领域)FPA性格色彩学到底有什么作用?如是说:第一,让你知道你是谁。你可以知道你为何快乐和痛苦,你的致命死穴在哪儿,此宝为“洞见”。第二,让你知道别人是谁。你能拥有读心术,知道他人在想什么,弄明白为何总有些人不可理喻和难以理解,此宝为“洞察”。第三,让你可做更好的更快乐的自己。你能有办法痛改自己的缺点,吸取别人的精华,达至人生平衡,此宝为“修炼”。第四,让你可以搞定一切你想搞定的人,文雅点说就是,与谁都能和谐相处还可达成你的目标,此宝为“影响”。 下面将有我为大家带来FPA性格色彩演说:红色性格:热情开朗积极乐观激情澎拜善于表达调动氛围乐于助人蓝色性格:独立思考成熟稳重情歌细腻迷恋细节讲究精确善于分析执着有恒黄色性格:目标导向永无止境控制欲强战胜对方坚定自信毫不动摇情绪化小抗压力强坦率直接实用主义绿色性格:中庸之道稳定低调乐天知命与世无争镇定自若处事不惊天性宽容耐心柔和先人后己欲取先予。(FPA性格色彩与其他性格分析心理书籍表面的差别是符号不同,然而真正的核心差异是:性格色彩内部有一个核心动机,所谓动机就是“为什么做”,而所有在外的行为只是“做什么”。知道“为什么做”比“做什么”要重要得多。换句话来讲,我们要探寻的是人类行为背后的根源,而非仅看到表象就心满意足地以为都懂了。动机就是“为什么做”,行为就按“做什么”。fpa性格色彩学中强调“性格”是天生的,所谓“性格”就是“原本的我”,“个性”是后天的,所谓“个性”就是“现在的我”天生的性格决定了我们遇事的本能反应,成长经历及生活环境决定了我们遇事的思维方式,这两部分的结合,就决定了我们的目前的行为!前者需要学习了解,后者需要持续训练调整!
FPA乐嘉性格色彩测试中的四种颜色分别代表什么意思? 2012-2-21 15:11 提问者:sqsqing 我来帮他解答 2012-2-21 18:46 满意回答 红色优势 1.阳光心态,积极快乐 红色发明了飞机,蓝色发明了降落伞.红色发明了游艇,蓝色发明了救生圈.红色建造了高楼,蓝色生产了救火栓.红色发射了飞船,蓝色办了保险公司.如果说黄色的正面思考更加来源于他们"不服输"的动机,更加侧重在解决问题上.那么,红色的正面思考,更多地是因为他们天性习惯于"向往快乐和美好'的动机,更加侧重在精神层面上的鼓励和暗示. 红色以喜悦拥抱每一件事情.健康的红色能在每件事情中看到美好的一面,即使是他们不理解或未曾思考过的事物都能使他们快乐.生命的黑暗和死亡的阴影,都无法令他们忧虑.奇妙的是,当他们对生命抱以开放和接受的态度而不苛求什么时,生命所带给他们的意义却更加丰富. 2.激情澎湃,梦想万岁 一种有内而外的感性动物.红色具备"生命的激情",为人感性,情感上高度丰富. 黄色的现实主义,在梦想中更加注重的是成功.蓝色的古典主义,小心合理地判定自己的梦想.绿色的稳定主义,更加宁愿不冒风险安于现状.红色的浪漫主义,更加看重的是人生的体验. 3.热情开朗,喜欢交友 字典里没有"陌生"这两个字. 在对于朋友的定义上,蓝色秉持的是"人生得一知己足矣!"的人生哲学.红色则更加宁愿是"普天之下,莫非我友"的人生态度.对于大多销售人员来讲,红色早期上手更快,因为他们的人际关系富有宽度但偏浅.而蓝色在早期开拓不力,完全是因为他们在拓展人际关系的宽度上有着自己的困难,他们的人际关系是窄而深的路径. 红色把幸福与快乐视为人生的目标.由于他们对事情总有很高的兴致,因此他们是令人愉快的伙伴.而且他们的活力与热情具有感染力,能够辐射到周围,和这样的人相处时,总是充满乐趣而且容易被他们活泼的精神所感动. 4.童心未泯,富有趣味 虽然红色也会被一些事物困扰,但他们对自由的强烈的渴望,将本能地分辨出包袱并且毫不犹豫地甩开它. 红色天性里对于快乐的向往,让他们可以用童心来欣赏一切,这种生活态度和哲学,将使他们不会复杂化.他们最懂得享受生命,不管他们从事的是什么,
FPA性格色彩之黄色性格 优势 1.目标导向,永无止境 以目标和结果为导向,不达目的,誓不罢休,是黄色从来就知道的. 信念的坚持,至少也是生命延续的理由.虽然黄色和蓝色都是坚持,但在信念的坚持上,黄色仍比兰色要做的出色. 黄色似乎很少有知足的时候,他们总是给自己定下一个又一个的目标去达成.成大事的黄色,都不能容忍平淡无奇的生活状态,渴望体验斗争的乐趣.黄色是四种人当中最有工作狂倾向的人. 2.求胜欲望,战胜对方 黄色自己的心理暗示正式---成为生活的强者,与此同时,他们也尊重强者,他们认为与强者的相处可以让自己变得更强.通过与成功者的相处可以让自己更快找到成功的捷径.3%v{}U
乐嘉的性格色彩分析 说明:在最符合你的句子前打钩。每组只选一个答案,请拿出纸和笔写下题目序号和对应的答案,做完全部三十道题目后,按提示分序号计算。 1、关于人生观,我的内心其实是: A 希望能够有尽量多的人生体验,所以会有非常多样化的想法。 B 在小心合理的基础上,谨慎地确定自己的目标,一旦确定会坚定不移地去做。 C 更加注重的是取得一切有可能的成就。 D 宁愿剔除风险而享受平静或现状。 2、如果爬山旅游,在下山回来的路线选择上,我更在乎: A 好玩有趣,所以宁愿新路线回巢。 B 安全稳妥,所以宁愿原路线返回。 C 挑战困难,所以宁愿新路线回巢。 D 方便省心,所以宁愿原路线返回。 3、通常在表达一件事情上,我更看重: A 说话给对方感受到的强烈印象。 B 说话表述的准确程度。 C 说话所能达到的最终目标。 D 说话后周围的人际感受是否舒服。 4、在生命的大多数时候,我的内心其实更加欣喜于和希望多些: A 刺激。 B 安全。 C 挑战。 D 稳定。 5、我认为自己在情感上的基本特点是: A 情绪多变,经常情绪波动。 B 外表上自我抑制能力强,但内心感情起伏极大,一旦挫伤难以平复。 C 感情不拖泥带水,较为直接,只是一旦不稳定,容易激动和发怒。 D 天性情绪四平八稳。 6、我认为自己在整个人生中,除了工作以外,在控制欲上面,我: A 没有控制欲,只有感染带动他人的欲望,但自控能力不算强。 B 用规则来保持我对自己的控制和对他人的要求。
C 内心是有控制欲和希望别人服从我的。 D 不会有任何兴趣去影响别人,也不愿意别人来管控我。 7、当与情人交往时,我倾向于着重: A 兴趣上的相容性,一起做喜欢的事情,对他的爱意溢于言表。 B 思想上的相容性,体贴入微,对他的需求很敏感。 C 智慧上的相容性,沟通重要的想法,客观地讨论辩论事情。 D 和谐上的相容性,包容理解另一半的不同观点。 8、在人际交往时,我: A 心态开放,可以快速建立起友谊和人际关系。 B 非常审慎缓慢地进入,一旦认为是朋友,便长久地维持。 C 希望在人际关系中占据主导地位。 D 顺其自然,不温不火,相对被动。 9、我认为自己大多数时候更是: A 感情丰富的人。 B 思路清晰的人。 C 办事麻利的人。 D 心态平静的人。 10、通常我完成任务的方式是: A 经常会赶在最后期限前完成。 B 自己做,精确地做,不要麻烦别人。 C 先做,快速做。 D 使用传统的方法,需要时从他人处得到帮忙。 11、如果有人深深惹恼我时,我: A 内心感到受伤,认为没有原谅的可能,可最终很多时候还是会原谅对方。 B 深深感到愤怒,如此之深怎可忘记?我会牢记,同时未来完全避开那个家伙。 C 会火冒三丈,并且内心期望有机会狠狠地回应打击。 D 我会避免摊牌,因为那还不到那个地步,那个人多行不义必自毙,或者自己再去找新朋友。 12、在人际关系中,我最在意的是: A 得到他人的赞美和欢迎。 B 得到他人的理解和欣赏。 C 得到他人的感激和尊敬。
看黄色性格的内心世界----FPA性格色彩 在黄色性格的人的生命旅程里,他们关注的是他们所自我认可的方向上的成绩,他们要的是业绩,他们认为能力是最重要的东西。然而同时这种对工作痴迷的价值观却成了黄色的严重局限。他们经常拥有一种不达目标誓不罢休的毅力。他们是敢于挑战的,他们是极度渴望成功的。在黄色的骨子里拥有着一种极强的控制欲望。黄色自视极高,这是他们通过自己的成绩和荣耀所构筑起来的,但是一旦他们失去了成绩和地位,自尊心便会受到极大的伤害。对于黄色而言在他的内心深处他们认为,如果我认为对的东西我一定会坚持到底。但是同时如果我认为对的东西我一定会想方设法来影响你改变你,让你来接受我的观点和想法。黄色对于暧昧、指挥系统的混乱十分敏感和难以容忍,他们喜欢非黑即白的态度。黄色想树立好的形象。由于一门心思力图扮演受人尊重的角色,他们不能认识内在的自己。黄色对于成功的迫切,对周围产生可怕的压力,黄色对别人操纵权利和行使主导权十分警惕,认为对那些自以为是的家伙,就应该毫不留情,殊不知他们自己有时也自以为是。黄色往往会因为他们的孤傲和过度理性,把自己孤立在一个神奇的感性世界之外。他们经常错失真正的友谊。相对于隐秘的黄色内心来说:骄傲和故意高傲是一种浅薄的防卫,除非他们能让自己去体验那种亲密和脆弱,否则他们可能一生成为自己给自己戴上枷锁的罪犯。黄色告诉我们:“受苦的人没有悲观的权力,远征的人没有流泪的资格。”在生活中他们不在乎外接的评价,毅然而然坚持着自己所选的道路。他们是充满自信的,他们是拥有强烈进取心的,他们是富有责任感的,他
们是坦率的,他们是有居安思危的防卫意识的。他们做事雷厉风行,是一个天生的领导者。在我们生活中健康的黄色是具有社会意识的领导者,能够运用他们的热情和希望激发别人,和人群及有价值的目标建立起深厚的联系。不健康的黄色是轻蔑傲慢、积极干练的野心份子,他们一般是不带感情的,不顾人与人之间的亲密,未达目的而支配他人。我们不得不佩服的是黄色的坚定和执着,他们希望能够战胜别人,让别人服输的那种欲望几乎纵贯他们整个生命的任何一个细节。黄色重视效率,缺乏耐心,他们非常厌恶工作能力差多思而不实干的人。在黄色性格的局限性里面表现的尤为明显的是,黄色对于他人的弱点极度不耐烦,而且毫不掩饰的表现在他的五官上,甚至言语相加产生冲突。在黄色的天性里黄色会主动向别人进攻的,在工作上黄色很容易演变成独行大侠。其中可悲之处在于,天性中的黄色他们会因为过渡的暴政和严苛使其不得人心。典型的黄色不加控制,他们会欺人太甚,他们认为所有的人都应该赶上自己的步法,他们不够心平气和,因此无法赢得下属的支持。对于“永远知道自己想要什么的”的黄色来说,他们一生中奋力最求自己的目标。他们善于操纵和控制,他们将方向盘打向自己想要去的地方,而很少的考虑浪花是否会溅到别人身上。所以在黄色的灵魂最深处要让黄色学会为他人考虑,那真是件奇迹,他们似乎天生就觉得这个世界就应该围绕他们转的。从这个意义上讲,黄色的“理所当然”的心态,将顺其自然的成为他们人生成长中一个最为麻烦的桎梏和障碍。他们骨子里认为和别人的情感是可以培养的,但是在举手投足之间却发现自己已经失去了培养感情的能力,也同时在无形中与别人产生了隔阂。
Q1:请如实填写你的姓名 ____________ Q2:1.关于人生观,我的内心其实是: ○A人生体验越多越好,所以想法极多。 ○B深度比宽度在人生中更重要,目标要谨慎,一旦确定就坚持到底。○C无论做什么,人生必须得有所成。 ○D有生就有死,不要太辛苦,活着就好。 Q3:2.如果爬山旅游,在下山回来的路线选择上,我更在乎: ○A要好玩有趣,不愿重复,所以宁愿走新路线。 ○B要安全稳妥,担心危险,所以宁愿走原路线。 ○C要挑战自我,喜欢冒险,所以宁愿走新路线。 ○D要方便省心,害怕麻烦,所以宁愿走原路线。 Q4:3.通常在表达一件事情上,别人认为我: ○A总是给人感受到强烈印象。 ○B总是表述极其准确。 ○C总能围绕最终目的。 ○D总能让周围人很舒服。 Q5:4.在生命多数时候,我其实更加希望: ○A刺激。 ○B安全。 ○C挑战。 ○D稳定。 Q6:5.我认为自己在情感上的基本特点是: ○A情绪多变,经常情绪波动。 ○B外表自我抑制强,但内心感情起伏大,一旦挫伤难以平复。 ○C感情不拖泥带水,较直接,一旦不稳定,容易发怒。 ○D天性四平八稳。 Q7:6.我认为自己在整个人生中,除了工作以外,在控制欲上面,我:○A没有控制欲,有感染带动他人的欲望,但自控能力不强。 ○B用规则来保持我对自己的控制和对他人的要求。 ○C内心有控制欲、希望别人服从我。 ○D不去管别人,也不愿意别人来管我。
Q8:7.当与情人交往时,我倾向于着重: ○A一起做喜欢的事情,对他的爱意溢于言表。 ○B体贴人微,对他的需求极其敏感。 ○C沟通重要的想法,尽情地辩论事情。 ○D包容另一半所有的不同观点。 Q9:8.在人际交往时,我: ○A心态开放,可快速建立起人际关系。 ○B非常审慎缓慢地进人,一旦认为是朋友便会长久。 ○C希望在人际关系中占据主导地位。 ○D顺其自然,不温不火,相对被动。 Q10:9.我认为自己为人更是: ○A感情丰富。 ○B思路清晰。 ○C做事直接。 ○D为人温和。 Q11:10.通常我完成任务的方式是: ○A经常是赶在最后期限前的一刻完成。 ○B自己精确地做,不麻烦别人。 ○C最快速做完,再找下一个任务。 ○D该怎么做就怎么做,需要时从他人处得到帮忙。 Q12:11.如果有人深深惹恼我时,我: ○A内心受伤,认为不可能原谅,但最终还是会原谅对方。○B如此之深的愤怒不会忘记,同时未来完全避开那个家伙。○C火冒三丈,内心期望有机会狠狠地回应。 ○D避免摊牌,因为还不到那个地步。 Q13:12.在人际关系中,我最在意的是: ○A欢迎。 ○B理解。 ○C尊敬。 ○D接纳。 Q14:13.在工作上,我表现出更多的是: ○A热忱,有很多想法且很有灵性。
fpa性格色彩测试题 一、关于人生观,我的内心其实是 A人生体验越多越好,所以想法极多 B 深度比宽度在人生中更重要,目标要谨慎,一旦确定就要坚持到底 C 无论做什麽,认识必须得有所成 D 别过得太辛苦,轻松就好 二、如果爬山旅游,在下山回来的路线,选择上,我更在乎: A 要好玩有趣,不愿重复,所以宁愿走新路线 B 要安全稳妥,担心危险,所以宁愿走原路线 C 要挑战自我就,喜欢冒险,所以宁愿走新路线 D 要方便省心,害怕麻烦,所以宁愿走原路线三、通常在表达一件事情上,别人认爲我 A 总是给人感受到强烈印象 B 总是表述极其准确 C 总能围绕最终目的、 D 总能让周围人很舒服 四、在生命多数时候,我其实更加希望 A 刺激 B 安全 C 挑战 D 稳定 五、我认爲自己在情感上的基本特点是 A 情绪多变,经常情绪波动 B 外表自我抑制强,但内心感情起伏大,一旦挫伤难以平复 C 感情不拖泥带水,较直接,一旦不稳定,容易发怒 D 天性四平八稳 六、我认爲自己在整个人生中,除了工作以外,在控制欲上面,我;’ A 有感染带动他人的欲望,但自控能力不强 B 用规则来要求自己和他人 C 希望别人服从我
D 从不去管别人 七、当与情人交往时,我倾向于着重 A 一起做喜欢的事情,对他的爱意溢于言表 B 体贴入微,寡言但对他的需求极其敏感 C 沟通重要的想法,尽情地辩论事情 D 跟随他的脚步就好 八、在人际交往时,我 A 心态开放,可快速建立起人际关系 B 非常审慎缓慢地进入,一旦认爲是朋友便会长久 C 总是在人际关系中占据主导地位 D 顺其自然,不温不火,相对被动 九、我认爲自己爲人更是 A 感情丰富 B 思路清晰 C 做事直接 D 爲人温和 十、通常我完成任务的方式是 A 经常是赶在最后期限前的一刻完成 B 自己精确地做,不麻烦别人 C 最快速昨晚,再找下一个任务 D 该怎麽做就怎麽做,需要时从他人出得到帮助十一、如果有人深深惹恼我,我 A 内心受伤,认爲不可能原谅,但最终可能还是会原谅对方 B 如此之深的愤怒不会忘记,同时未来完全避开那个家伙 C 火冒三丈,内心期望有机会狠狠地回应 D 避免摊牌,因爲还不到那个地步