【转】svpwm的MATLAB仿真实现
为了能让大家在已经泛滥的知识上少走弯路,本人把自己在SVPWM上的认识与看到此贴的读者们一起分享,废话少说,切入正题:在看下面内容之前,您应该至少对SVPWM的原理有大致的了解,如果不了解也没关系,你只要按照我交给你的步骤来做,也可以轻而易举的跨过SVPWM这道坎,在仿真之前您必须安装MATLAB7.0或以上版本,必须确保simpowersysm工具箱已被安装,如果以上要求已经达到,那么就可以执行以下步骤了:步骤1:打开matlab主界面,然后在command window界面中的“>>”旁边输入simulink,打开simulink开发环境后新建一个mdl文件,在simulink下拉菜单中的
ports&subsystems中找到subsystem模块,用其建立一个如图1的总的模块,这个模块有两个输入口,一个输出口(实际上包含六路PWM信号),接来的东西都将在这个模块中添加,输入输出模块的名称可以在双击模块后自己更改,其中Vahar,Vbetar是需要输出的电压在两相静止坐标系下的两个分量,输出是控制逆变器六个IGBT的pwm脉冲信号。
图1
也许有人会问,输入参数不是还包括直流电压和功率开关频率吗?别急,下面接着让您看到上述模块的内部情况
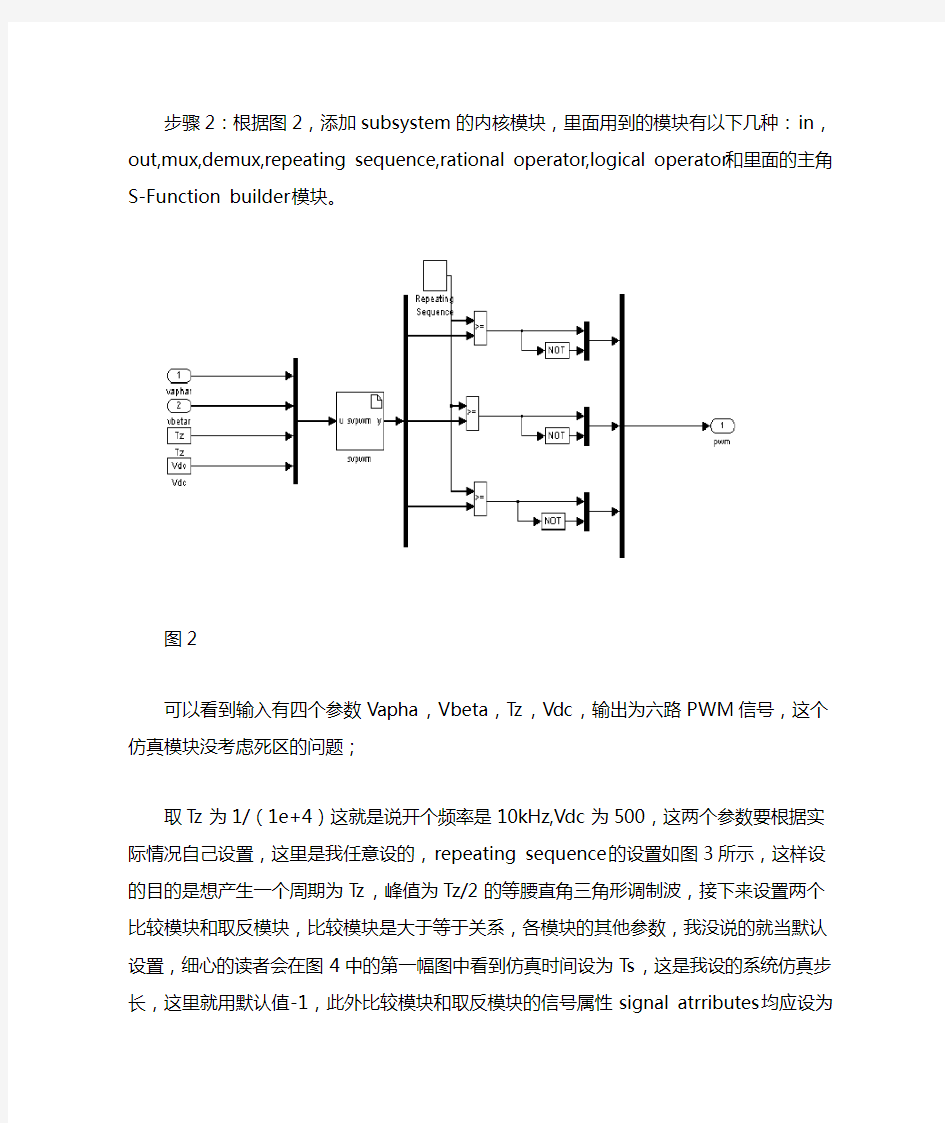
步骤2:根据图2,添加subsystem的内核模块,里面用到的模块有以下几种:in,out,mux,demux,repeatingsequence,rationaloperator,logical operator和里面的主角S-Function builder模块。
图2
可以看到输入有四个参数Vapha,Vbeta,Tz,Vdc,输出为六路PWM信号,这个仿真模块没考虑死区的问题;
取Tz为1/(1e+4)这就是说开个频率是10kHz,Vdc为500,这两个参数要根据实际情况自己设置,这里是我任意设的,repeating sequence的设置如图3所示,这样设的目的是想产生一个周期为Tz,峰值为Tz/2的等腰直角三角形调制波,接下来设置两个比较模块和取反模块,比较模块是大于等于关系,各模块的其他参数,我没说的就当默认设置,细心的读者会在图4中的第一幅图中看到仿真时间设为Ts,这是我设的系统仿真步长,这里就用默认值-1,此外比较模块和取反模块的信号属性signal atrributes均应设为Boolean格式。
图3
图4
步骤3:设置s-builder模块,这个设置也很简单,但是看起来有点多,图2中的svpwm 模块就是用simulink中的s-function builder建立的,只是名字改成svpwm罢了,有图2可以看出svpwm产生的三个时间比较值与repeating sequence产生的等腰三角波进行比较,从而产生想要的六路PWM波,svpwm的核心算法是使用C语言编写的,下面详细介绍该模块的设置,s-fanction builder的界面如下图:
图5
在s-function name 中输入svpwm,如果你把我下面说的设置完后,再按一下s-function name旁边的build,接着就会在matlab的显示路径文件夹中(如“我的文档/matlab”)产生几个格式各异的以svpwm开头的文件,如svpwm.c,svpwm.tlc等,不过这是后话,
先说说设置,在initialization中的各参数均设为0,sample mode 设为inherited,如图5所示,这些都是默认值,也是说可以不用管它就可以了,在data properties中设:
图6
port name 为u (默认是u0),行数row为4(因为有四个输入参数),其他选用默认值,如图6所示,设output ports的输出port name为y(原来为y0),行数rows为3(因为有三个输出),其他参数默认,剩下的两个parameters和data type attributes均采用默认值;在libraries中全部使用默认值;接下来要改的就是outputs中的内容,也是实现SVPWM的核心算法,必须注意要必须勾选inputs are needed in the output function(direct feedthrough),这句话的意思是:输出结果直接用到了输入数据,比如y=u+1,将下面给出的C语言程序复制到空白处,如图7所示:
图7
/*u[4]={vaphar,vbetar,Tz,Vdc}*/ int A,B,C,N;
double X,Y,Z,Tx,Ty,T0,Tl,Tm,Th;
if (u[1]>0) A = 1;
else A=0;
if ((1.732051*u[0]-u[1])>0) B = 1; else B=0;
if ((-1.732051*u[0]-u[1])>0) C = 1; else C=0;
N=A+2*B+4*C;
X=1.732051*u[1]*u[2]/u[3];
Y=(0.8660*u[1]+1.5*u[0])*u[2]/u[3];
Z=(-0.8660*u[1]+1.5*u[0])*u[2]/u[3]; switch (N)
{
case 1: Tx= Y;Ty=-Z;break;
case 2: Tx=-X;Ty= Y;break;
case 3: Tx= Z;Ty= X;break;
case 4: Tx=-Z;Ty=-X;break;
case 5: Tx= X;Ty=-Y;break;
default: Tx=-Y;Ty= Z;
}
if ((Tx+Ty)>u[2])
{
Tx=Tx*u[2]/(Tx+Ty);
Ty=Ty*u[2]/(Tx+Ty);
}
T0=(u[2]-(Tx+Ty))/4;
Tl=(u[2]+Tx-Ty)/4;/*Tl=T0/4+Tx/2*/
Tm=(u[2]-Tx+Ty)/4;/*Tm=T0/4+Ty/2*/
Th=(u[2]+Tx+Ty)/4;/*Th=T0/4+Ty/2+Ty/2*/
switch (N)
{
case 1 :y[0]=Tm;y[1]=T0;y[2]=Th;break;
case 2 :y[0]=T0;y[1]=Th;y[2]=Tm;break;
case 3 :y[0]=T0;y[1]=Tl;y[2]=Th;break;
case 4 :y[0]=Th;y[1]=Tm;y[2]=T0;break;
case 5 :y[0]=Th;y[1]=T0;y[2]=Tl;break;
default :y[0]=Tl;y[1]=Th;y[2]=T0;
}
接下来的两个continuous derivatives和discrete update都不用改,使用默认值,这两个只有在有导数时才会用到,最后一个在build info中勾选show comlile steps(在build 时会显示编译过程)、create a debugged mex-file和generate wrapper tlc(这个我也不知道干什么用的)。这下所有的细节设置都结束了,
步骤4:设置仿真参数,回到mdl主界面,选择菜单栏中的simulation/configurate parameters,里面的仿真时间可以根据实际情况自己定,在sover options中,type建议选fixed-step,fixed step size应本人设为5e-6,这个参数是仿真时最小的步长,这个参数必须比开关周期Tz小,否则无法仿真,其他参数都不用管它,要想知道这些参数是什么意思,就多看看matlab 中的help,里面都有详细说明。
步骤5是安装lcc,在matlab的command window中输入mex -setup,然后按照提示将LCC安装上,安装完毕的提示是done。。。,接下来你就可以做跟你有用有关的事了,把SVPWM当做一个模块了使用。
步骤6:打开s-function builder,单击一下里面的build,接着您就可以看到编译过程,如果看到success,那就说明您已经成功了。编译完后关闭s-function builder,接下来做你的系统仿真吧,只要您的svpwm模块和编译出来的svpwm.c放在一个文件夹中,以后仿真就不用再点build了。
很简单吧,其实SVPWM的仿真没什么难的!需要提醒同志们的是,在仿真之前必须build 一下s-function builder,不然无法运行模块,采用s-builder的原因是建成的模块很简洁,而且运行速度要比其他方法快的多,接下来同志们该去自己试一下了!
课程设计任务书
目录 1 绪论 (1) 1.1CATIA V5软件介绍 (1) 1.2ADAMS软件介绍 (1) 1.3S IM D ESIGNER软件介绍 (2) 1.4本次课程设计的主要内容及目的 (2) 2 曲柄连杆机构的建模 (3) 2.1活塞的建模 (3) 2.2活塞销的建模 (5) 2.3连杆的建模 (5) 2.4曲轴的建模 (6) 2.5汽缸体的建模 (8) 3 曲柄连杆机构的装配 (10) 3.1将各部件导入CATIA装配模块并利用约束命令确定位置关系 (10) 4 曲柄连杆机构导入ADAMS (14) 4.1曲柄连杆机构各个零部件之间运动副分析 (14) 4.2曲柄连杆机构各个零部件之间运动副建立 (14) 4.3曲柄连杆机构导入ADAMS (16) 5 曲柄连杆机构的运动学分析 (17) 结束语 (21) 参考文献 (22)
1 绪论 1.1 CATIA V5软件介绍 CATIA V5(Computer-graphics Aided Three-dimensional Interactive Application)是法国Dassault公司于1975年开发的一套完整的3D CAD/CAM/CAE一体化软件。它的内容涵盖了产品概念设计、工业设计、三维建模、分析计算、动态模拟与仿真、工程图的生成、生产加工成产品的全过程,其中还包括了大量的电缆和管道布线、各种模具设计与分析、人机交换等实用模块。CATIA V5不但能保证企业内部设计部门之间的协同设计功能而且还可以提供企业整个集成的设计流程和端对端的解决方案。CATIA V5大量应用于航空航天、汽车及摩托车行业、机械、电子、家电与3C产业、NC加工等领域。 由于其功能的强大而完美,CATIA V5已经成为三维CAD/CAM领域的一面旗帜和争相遵从的标准,特别是在航空航天、汽车及摩托车领域。法国的幻影2000系列战斗机就是使用CATIA V5进行设计的一个典范;波音777客机则使用CATIA V5实现了无图纸设计。另外,CATIA V5还用于制造米其林轮胎、伊莱克斯电冰箱和洗衣机、3M公司的粘合剂等。CATIA V5不仅给用户提供了详细的解决方案,而且具有先进的开发性、集成性及灵活性。 CATIA V5的主要功能有:三维几何图形设计、二维工程蓝图绘制、复杂空间曲面设计与验证、三维计算机辅助加工制造、加工轨迹模拟、机构设计及运动分析、标准零件管理。 1.2 ADAMS软件介绍 ADAMS即机械系统动力学自动分析(Automatic Dynamic Analysis of Mechanical Systems),该软件是美国MDI公司(Mechanical Dynamics Inc.)开发的虚拟样机分析软件。目前,ADAMS己经被全世界各行各业的数百家主要制造商采用。根据1999年机械系统动态仿真分析软件国际市场份额的统计资料,ADAMS软件销售总额近八千万美元、占据了51%的份额。 ADAMS软件使用交互式图形环境和零件库、约束库、力库,创建完全参数化的机械系统几何模型,其求解器采用多刚体系统动力学理论中的拉格郎日方程方法,建立系统动力学方程,对虚拟机械系统进行静力学、运动学和动力学分析,输出位移、速度、加速度和反作用力曲线。ADAMS软件的仿真可用于预测机械系统的性能、运动范围、
Tracepro 入门与进阶
CYQ DESIGN STUDIO
1
Tracepro 入门与进阶
CYQ DESIGN STUDIO
内 容 简 介
本书以美国 Lambda Research Corporation 的最新 3.24 版本为蓝本进行编写, 内容涵盖了 tracepro3.24 光学仿真设计的概念、tracepro 软件的配置和用户定制、光 学元件模型的创建、描光、分析等内容。 本书章节的安排次序采用由浅入深,前后呼应的教学原则,在内容安排上,为方 便读者更快、更深入地理解 tracepro 软件中的一些相关概念、命令和功能,并对运用 该软件进行光学仿真设计的过程有一个全局的了解,本书中介绍了单片 LCD 投影机 的仿真设计全过程,同时在本书的最后一章详细介绍了背光源等光学仿真设计过程, 增强了本书的可读性和实用性,摆脱单个概念、命令、功能的枯燥讲解和介绍。 本书可作为光学专业人员的自学教程和参考书籍, 也可作为大专院校光学、 光电专业 的学生学习 tracepro 的使用教材。
2
Tracepro 入门与进阶
CYQ DESIGN STUDIO
前
言
Tracepro 是一套可以做照明光学系统分析、传统光学分析,辐射度以及光度分析 的软件, 它也是第一套由符合工业标准的 ACIS 立体模型绘图软件发展出来的光机软 件。 功能强大的 Tracepro 减轻了光学设计人员的劳动强度,节约了大量的人力资源, 缩短了设计周期,还可以开发出更多质量更高的光学产品。但目前 Tracepro 学习教 程甚少, 不少初学者苦于无参考学习资料而举步为艰。 本人根据从事光学设计的经验 与运用 Tracepro 的体会,汇集成书,目的是使 Tracepro 的初学人员能快速入门,快 速见效,使已入门者能进一步提高 Tracepro 的应用水平和操作能力,从而在工作中 发挥更大的效益,为中国的光学事业作出贡献! 本书乃仓促而成,虽然几经校对,但错误之处在所难免,恳请广大读者朋友予以 指正,不甚感谢! 电子邮箱: cyqdesign@https://www.doczj.com/doc/9c8315340.html,
陈涌泉 2004 年 12 月 4 日
3
一种基于仿真测试平台的实物自动化测试环境 摘要 针对FPGA软件测试过程中仿真测试和实物测试的不足,提出了一种基于仿真测试用例的实物自动化测试环境,将用于仿真测试的Testbench进行解析处理,形成能够用于FPGA 实物测试的传输信号,通过执行器将此信号转换为作用于被测FPGA芯片的实际信号,并采集被测FPGA芯片的响应,实现对FPGA的实物自动化测试。采用实物自动化测试环境验证平台对设计架构进行了验证,取得了良好的效果。 0 引言 随着FPGA设计规模的不断扩大,因FPGA软件设计而造成的质量问题也越来越突出,成为影响装备质量的重要因素。而测试是当前解决该问题的最有效手段,因此,越来越多的型号装备产品定型过程对FPGA软件测试提出了新的要求[3]。 然而FPGA测试与常规软件测试不同,因其测试环境限制,测试过程需大量依赖于仿真和分析的方法[4],而在实际芯片中开展的测试往往是板级、系统级测试,测试结果可信度低且无法有效发现FPGA软件设计缺陷[5-6]。为此,本文提出了一种基于仿真测试平台Testbench数据的自动化测试环境框架,测试结果具有较高的可信度,能够有效提高FPGA 测试质量。 1 FPGA动态测试概述1.1 FPGA动态测试环境原理 当前型号装备FPGA定型测试过程主要方法包括设计检查、功能仿真、门级仿真、时序仿真、静态时序分析、逻辑等效性检查和实物测试。其中功能仿真、门级仿真、时序仿真和实物测试均为动态测试,开展测试时需依据测试要求,建立FPGA运行的外围环境,根据测试对象的不同,可将此类环境分为仿真测试环境和实物测试环境。 采用仿真测试环境时,需根据测试用例将测试数据映射为不同时刻下的不同信号值,形成仿真测试平台文件Testbench,通过仿真测试工具将被测FPGA产生的响应进行采集和自动判断,形成测试结论[7]。
时域有限差分法的Matlab仿真 关键词: Matlab 矩形波导时域有限差分法 摘要:介绍了时域有限差分法的基本原理,并利用Matlab仿真,对矩形波导谐振腔中的电磁场作了模拟和分析。 关键词:时域有限差分法;Matlab;矩形波导;谐振腔 目前,电磁场的时域计算方法越来越引人注目。时域有限差分(Finite Difference Time Domain,FDTD)法[1]作为一种主要的电磁场时域计算方法,最早是在1966年由K. S. Yee提出的。这种方法通过将Maxwell旋度方程转化为有限差分式而直接在时域求解,通过建立时间离散的递进序列,在相互交织的网格空间中交替计算电场和磁场。经过三十多年的发展,这种方法已经广泛应用到各种电磁问题的分析之中。 Matlab作为一种工程仿真工具得到了广泛应用[2]。用于时域有限差分法,可以简化编程,使研究者的研究重心放在FDTD法本身上,而不必在编程上花费过多的时间。 下面将采用FDTD法,利用Matlab仿真来分析矩形波导谐振腔的电磁场,说明了将二者结合起来的优越性。 1FDTD法基本原理 时域有限差分法的主要思想是把Maxwell方程在空间、时间上离散化,用差分方程代替一阶偏微分方程,求解差分方程组,从而得出各网格单元的场值。FDTD 空间网格单元上电场和磁场各分量的分布如图1所示。 电场和磁场被交叉放置,电场分量位于网格单元每条棱的中心,磁场分量位于网格单元每个面的中心,每个磁场(电场)分量都有4个电场(磁场)分量环绕。这样不仅保证了介质分界面上切向场分量的连续性条件得到自然满足,而且
还允许旋度方程在空间上进行中心差分运算,同时也满足了法拉第电磁感应定律和安培环路积分定律,也可以很恰当地模拟电磁波的实际传播过程。 1.1Maxwell方程的差分形式 旋度方程为: 将其标量化,并将问题空间沿3个轴向分成若干网格单元,用Δx,Δy和Δz 分别表示每个网格单元沿3个轴向的长度,用Δt表示时间步长。网格单元顶点的坐标(x,y,z)可记为: 其中:i,j,k和n为整数。 同时利用二阶精度的中心有限差分式来表示函数对空间和时间的偏导数,即可得到如下FDTD基本差分式: 由于方程式里出现了半个网格和半个时间步,为了便于编程,将上面的差分式改写成如下形式:
基于Workbench的仿真内燃机曲柄连 杆机构动力学分析 (机械与动力工程学院南京 211816) 摘要:本文以S195 内燃机为例,对单缸内燃机的曲柄连杆机构简化模型 进行了有限元分析。根据力学分析结果和强度要求设计内燃机曲柄连杆机构结构,并应用UG软件建立该机构三维数字化虚拟装配模型,结合有限元理论及其分析软件ANSYS Workbench,模拟分析了曲柄连杆机构装配体动力学分析,结果表明,数字化模型结合装配体有限元分析,可解决曲柄连杆机构结构强度评价问题,有助于缩短汽油机开发周期和减少成本。 关键词:曲柄连杆,有限元分析,Workbench,动力学仿真。 Dynamic analysis of the crank connecting rod mechanism based on Workbench simulation (Nanjing Technology of University, mechanical and power engineering, Yin Zhenhua, Nanjing, 211816) Abstract Based on the S195 diesel engine as an example, the crank connecting rod mechanism of single cylinder diesel engine was analyzed in finite element analysis. According to the mechanical analysis results and strength requirements, the structure of the engine crank connecting rod mechanism is designed, and the 3D digital virtual assembly model of the mechanism is established. Combined with the finite element theory and the analysis software ANSYS Workbench. The results show that the numerical model combined with the finite element analysis can solve the problem of structural strength evaluation of the crank link mechanism, which helps to shorten the development cycle and reduce the cost. Key words: crank connecting rod, finite element analysis, Workbench, dynamic simulation.
!"##!年第$期 福建电脑注:本文得到广东省科技厅攻关项目资金资助%项目编号"##"&’(&)电子科技大学青年基金项目资助%项目编号*+#"#,#-。 &、 引言目前嵌入式系统开发已经成为了计算机工业最热门的领域之一,嵌入式系统应用渗透到信息家电、工业控制、通信与电子设备、人工智能设备等诸多领域。然而嵌入式系统的软件与目标硬件紧密相关,软件开发周期长,开发成本昂贵,软件质量无法保障.&/."/。特别是嵌入式软件的测试工作,在整个开发周期中通 常占用着大部分时间 (-#01,#0)。软件测试是一个非常重要而又艰苦的过程。软件测试工具用来全部或部分的代替人工进行软件的测试工作。它能极大的节省人力、物力和财力,缩短项目的开发周期。 国际上,许多软件公司致力于开发功能强大的软件测试工具。按获得测试信息的方式分为纯硬件、纯软件、软硬件相结合三种类型的测试工具。纯硬件测试工具如仿真器、逻辑分析仪、开发系统等。纯软件测试工具如234563786的2345938:,是一种软件逻辑分析仪。软硬件相结合的测试工具如以;<公司的=>?938:为代表的虚拟仪器和以@AB 公司的BC58DEFD 为代表的测试工具。这三类测试工具都有一个缺点:没有提供一个集成各种软硬件测试工具的框架,使各类测试工具能紧密协调工作。 为提高测试工作的效率,迫切需要功能强大的嵌入式系统测试工具。 仿真开发在嵌入式系统开发中正在发挥着越来越重要的作用。许多软件公司已经开发出成熟稳定的嵌入式仿真开发工具。但是在嵌入式仿真开发中,仍然缺乏一种嵌入式系统测试工具的集成框架。本文正是基于这个目标,从软件体系结构的角度,研究和设计了一种称为G EFDH G 的嵌入式系统仿真测试平台的集成框架。并基于其上实现了一个嵌入式仿真测试平台3I >EFDH 。 "、 嵌入式系统仿真测试平台的体系结构EFDH 对于大规模复杂软件系统,其总体结构设计远比算法和数据结构的选择更重要.J /.!/。基于这样的认识和背景,本文在对嵌入式测试和嵌入式仿真开发深入研究的基础上,研究和设计了EFDH 的体系结构。"K &EFDH 的结构模型 EFDH 的体系结构主要借鉴了当前流行的嵌入式交叉开发工具的目标服务器L 目标代理结构.’/,分为宿主机端和仿真目标机端两大部分。 EFDH 的结构模型见图&: 图&EFDH 结构模型 EFDH 结构模型的基本特征:&M EFDH 由宿主机端和目标机端两大部分构成,宿主机 端以测试服务器DF (D8NO F86786)为核心;目标机端以测试代理D@P D8NO @Q84O M 为核心。 "M 所有的测试工具不与目标机端交互, 而只与测试服务器DF 进行交互;测试服务器DF 同测试代理D@交互。这样只要更换相应的测试代理D@,即可与不同的仿真开发系统一起工作。 J M 测试服务器DF 与所有测试工具之间通过嵌入式仿真测试工具交换协议EFDDR (ES?85585F3STU>O3C4D8NO DCCU 8RI VW>4Q8X6COCVCU ) 规范接口进行交互。!M 测试服务器DF 和测试代理D@之间通过嵌入式仿真测试协议EFD P ES?85585F3STU>O3C4D8NO X6COCVCU M 规范接口进行交互。 ’M 测试工具以软插件的形式集成到EFDH 中%EFDDR 和EFD 规范定义的接口是公开的和可免费获得的,第三方测试工具非常容易的集成到EFDH 中来。 -M 测试工具多种多样,可以是软件代码测试工具,也可以是硬件诊断测试工具,都可以很容易的集成到EFDH 中来,从而达到各类测试工具的紧密协作。 $M EFDH 中各类测试工具紧密集成到一个图形用户接口中,大大提高了用户的工作效率。 ,M 测试代理D@以一个线程的形式存在于仿真运行环境中,与各类模拟器之间通过固定的接口交互,获取丰富的测试信息。 "K "测试服务器DF 模型 测试服务器DF 是EFDH 的核心结构部件,作为EFDH 的测试管理器,其结构模型如图"。 图"测试服务器DF 结构模型 DF 的主要功能:&M DF 提供相应的EFDDR 协议规范接口,接受来自测试工具的控制命令和状态查询,并提供相应的数据传输接口,向测试工具返回对应的测试结果。 "M DF 提供相应的EFD 协议规范接口,向采集代理发送控制命令信息和状态查询信息,并且根据EFD 协议规范提供的接口收取返回信息。 J M DF 提供测试高速缓冲管理、 测试存储器管理以及流测试协议,管理和控制整个宿主机端。"K J 测试代理D@模型 嵌入式系统仿真测试平台的体系结构研究 邵荣防,罗克露 P 电子科技大学计算机科学与工程学院,四川 成都-&##’!M 【摘要】仿真开发在嵌入式开发中正逐步成为热点,仿真测试工具在仿真开发过程中正发挥着日益重要的作用。本文首先简要分析了当前的嵌入式测试工具,然后给出一种嵌入式仿真测试平台的体系结构EFDH 。基于EFDH 体系结构,实现了一个面向信息家电的嵌入式仿真测试平台3>EFDH 。 【关键词】嵌入式系统仿真开发 仿真测试平台
3.3.2 各种BP学习算法MATLAB仿真 根据上面一节对BP神经网络的MATLAB设计,可以得出下面的通用的MATLAB程序段,由于各种BP学习算法采用了不同的学习函数,所以只需要更改学习函数即可。 MATLAB程序段如下: x=-4:0.01:4; y1=sin((1/2)*pi*x)+sin(pi*x); %trainlm函数可以选择替换 net=newff(minmax(x),[1,15,1],{'tansig','tansig','purelin'},'trainlm'); net.trainparam.epochs=2000; net.trainparam.goal=0.00001; net=train(net,x,y1); y2=sim(net,x); err=y2-y1; res=norm(err); %暂停,按任意键继续 Pause %绘图,原图(蓝色光滑线)和仿真效果图(红色+号点线) plot(x,y1); hold on plot(x,y2,'r+'); 注意:由于各种不确定因素,可能对网络训练有不同程度的影响,产生不同的效果。如图3-8。 标准BP算法(traingd)
图3-8 标准BP算法的训练过程以及结果(原图蓝色线,仿真图+号线)增加动量法(traingdm) 如图3-9。 图3-9 增加动量法的训练过程以及结果(原图蓝色线,仿真图+号线)弹性BP算法(trainrp)如图3-10 图3-10 弹性BP算法的训练过程以及结果(原图蓝色线,仿真图+号线)
动量及自适应学习速率法(traingdx)如图3-11。 图3-11 动量及自适应学习速率法的训练过程以及结果(原图蓝色线,仿真图+号线)共轭梯度法(traincgf)如图3-12。
Requirements Models: None Properties: None Editions: TracePro LC, Standard and Expert Introduction In this example you will build a source model for a Siemens LWT676 surface mount LED based on the manufacturer’s data sheet. The dimensions will be used to build a solid model and the source output will be defined to match the LED photometric curve. Copyright ? 2013 Lambda Research Corporation.
Create a Thin Sheet First analyze the package to determine the best method of constructing the geometry in TracePro. The symmetry of the package suggests starting from a Thin Sheet and extruding the top and bottom halves with a small draft angle. Construct Thin Sheet in the XY plane. 1. Start TracePro 2. Select View|Profiles|XY or click the View XY button on the toolbar, and switch to silhouette mode, View|Silhouette. 3. Select Insert|Primitive Solid and select the Thin Sheet tab. 4. Enter the four corners of the Thin Sheet in mm in the dialog box, as shown below, and click Insert. 5. Click the Zoom All button or select View|Zoom|All to see the new object.
仿真测试系统 系统概述 FireBlade系统仿真测试平台基于用户实用角度,能够辅助进行系统方案验证、调试环境构建、子系统联调联试、设计验证及测试,推进了半实物仿真的理论应用,并提出了虚拟设备这一具有优秀实践性的设计思想,在航电领域获得了广泛关注和好评 由于仿真技术本身具备一定的验证功能,因此与现有的测试技术有相当的可交融性。在航电设备的研制和测试过程中,都必须有仿真技术的支持:利用仿真技术,可根据系统设计方案快速构建系统原型,进行设计方案的验证;利用仿真验证成果,可在系统开发阶段进行产品调试;通过仿真功能,还可对与系统开发进度不一致的子系统进行模拟测试等。 针对航电设备产品结构和研制周期的特殊性,需要建立可以兼顾系统方案验证、调试环境构建、子系统联调联试、设计验证及测试的系统仿真平台。即以半实物仿真为基础,综合系统验证、系统测试、设备调试和快速原型等多种功能的硬件平台和软件环境。 目前,众多研发单位都在思索着如何应对航电设备研制工作日益复杂的情况。如何采取高效的工程技术手段,来保证系统验证的正确性和有效性,是航电设备系统工程的重要研究内容之一,FireBlade 系统仿真测试平台正是在这种大环境下应运而生的。 在航电设备研制工程中的定位设备可被认为是航电设备研制工程中的终端输出,其质量的高低直接关系到整个航电设备系统工程目标能否实现。在传统的系统验证过程中,地面综合测试是主要的验证手段,然而,它首先要求必须完成所有分系统的研制总装,才能进行综合测试。如果能够结合面向设备的仿真手段,则可以解决因部分设备未赶上研发进度导致综合测试时间延长的问题。在以往的开发周期中,面向设备的仿真技术并没有真正得到重视: (1)仿真技术的应用主要集中在单个测试对象上,并且缺乏对对象共性的重用; (2)仿真技术缺乏对复杂环境与测试对象的模拟; (3)仿真技术的应用缺乏系统性,比如各个阶段中仿真应用成果没有实现共享,
编程方式实现: 1.惩罚函数 function f=fun(x,r) f=x(1,1)^2+x(2,1)^2-r*log(x(1,1)-1); 2.步长的函数 function f=fh(x0,h,s,r) %h为步长 %s为方向 %r为惩罚因子 x1=x0+h*s; f=fun(x1,r); 3. 步长寻优函数 function h=fsearchh(x0,r,s) %利用进退法确定高低高区间,利用黄金分割法进行求解h1=0;%步长的初始点 st=0.001; %步长的步长 h2=h1+st; f1=fh(x0,h1,s,r); f2=fh(x0,h2,s,r); if f1>f2 h3=h2+st; f3=fh(x0,h3,s,r); while f2>f3 h1=h2; h2=h3; h3=h3+st; f2=f3; f3=fh(x0,h3,s,r); end else st=-st; v=h1; h1=h2; h2=v; v=f1; f1=f2; f2=v; h3=h2+st; f3=fh(x0,h3,s,r); while f2>f3 h1=h2; h2=h3; h3=h3+st; f2=f3;
f3=fh(x0,h3,s,r); end end %得到高低高的区间 a=min(h1,h3); b=max(h1,h3); %利用黄金分割点法进行求解 h1=1+0.382*(b-a); h2=1+0.618*(b-a); f1=fh(x0,h1,s,r); f2=fh(x0,h2,s,r); while abs(a-b)>0.0001 if f1>f2 a=h1; h1=h2; f1=f2; h2=a+0.618*(b-a); f2=fh(x0,h2,s,r); else b=h2; h2=h1; f2=f1; h1=a+0.382*(b-a); f1=fh(x0,h1,s,r); end end h=0.5*(a+b); 4. 迭代点的寻优函数 function f=fsearchx(x0,r,epson) x00=x0; m=length(x0); s=zeros(m,1); for i=1:m s(i)=1; h=fsearchh(x0,r,s); x1=x0+h*s; s(i)=0; x0=x1; end while norm(x1-x00)>epson x00=x1; for i=1:m s(i)=1; h=fsearchh(x0,r,s);
基于SolidWorks的曲柄连杆机构动力学仿真研究 发表时间:2012-2-28 作者: 陈敏*刘晓叙来源: 万方数据 关键字: 发动机运动学动力学仿真 本文用SolidWorks软件建立了一个简化的单缸发动机模型,用COSMOS Motion对该模型进行了发动机运动学和动力学仿真,对运动学仿真的结果进行了验证。 设计往复活塞式发动机时,要进行发动机的运动学和动力学计算,发动机的运动学是计算发动机活塞的位移、速度和加速度。动力学计算主要包括主要运动件的载荷,为零件的强度计算提供依据。在过去的设计中,发动机的运动学和动力学引算一般是采用计算机编程的方式进行。 SolidWorks是目前应用较为广泛的三维设计软件,COSMOS Motion是以ADAMS软件的技术为内核的机构运动学和动力学仿真软件,是SolidWorks的一个插件,与SolidWorks可以进行无缝对接。我们运用该软件,对一个简化的单缸发动机模型进行了运动学与动力学仿真,其结果对往复活塞式发动机的运动学和动力学设计计算有参考意义,现将研究情况介绍如下: 1 发动机模型的基本情况 为了研究的需要,建立了一个简化的单缸发动机模型,主要的结构参数为:缸径125mm,行程160mm,连杆大、小头孔中心距210mm,λ=0.381。发动机的活塞、活塞销、连杆和曲轴用SolidWorks进行三维实体造型设计,然后进行装配,发动机装配后效果及坐标系见图1。 图1 发动机模型 2 发动机的运动学仿真 由于是对一个特定的模型作定量的运动学和动力学仿真,所以,从简单起见,在仿真参数中,将曲轴的转速设为60r/min,即1r/s。在COSMOS Motion中运行仿真后,可以得到活塞运行的位移、速度和加速度,见图2、图3、图4。
PID 控制算法的matlab 仿真 PID 控制算法就是实际工业控制中应用最为广泛的控制算法,它具有控制器设计简单,控制效果好等优点。PID 控制器参数的设置就是否合适对其控制效果具有很大的影响,在本课程设计中一具有较大惯性时间常数与纯滞后的一阶惯性环节作为被控对象的模型对PID 控制算法进行研究。被控对象的传递函数如下: ()1d s f Ke G s T s τ-= + 其中各参数分别为30,630,60f d K T τ===。MATLAB 仿真框图如图1所示。 图1 2 具体内容及实现功能 2、1 PID 参数整定 PID 控制器的控制参数对其控制效果起着决定性的作用,合理设置控制参数就是取得较好的控制效果的先决条件。常用的PID 参数整定方法有理论整定法与实验整定法两类,其中常用的实验整定法由扩充临界比例度法、试凑法等。在此处选用扩充临界比例度法对PID 进行整定,其过程如下: 1) 选择采样周期 由于被控对象中含有纯滞后,且其滞后时间常数为 60d τ=,故可选择采样周期1s T =。 2) 令积分时间常数i T =∞,微分时间常数0d T =,从小到大调节比例系数K , 使得系统发生等幅震荡,记下此时的比例系数k K 与振荡周期k T 。 3) 选择控制度为 1.05Q =,按下面公式计算各参数:
0.630.490.140.014p k i k d k s k K K T T T T T T ==== 通过仿真可得在1s T =时,0.567,233k k K T ==,故可得: 0.357,114.17,32.62, 3.262p i d s K T T T ==== 0.0053.57 p s i i p d d s K T K T K T K T === = 按此组控制参数得到的系统阶跃响应曲线如图2所示。 01002003004005006007008009001000 0.20.40.60.811.21.41.6 1.8 图2 由响应曲线可知,此时系统虽然稳定,但就是暂态性能较差,超调量过大,且响应曲线不平滑。根据以下原则对控制器参数进行调整以改善系统的暂态过程: 1) 通过减小采样周期,使响应曲线平滑。 2) 减小采样周期后,通过增大积分时间常数来保证系统稳定。 3) 减小比例系数与微分时间常数,以减小系统的超调。 改变控制器参数后得到系统的阶跃响应曲线如图3所示,系统的暂态性能得到明显改善、
4-14 一台直流电动机技术数据如下:额定功率PN=40kW ,额定电压UN=220V ,额定转速nN=1500r/min ,额定效率η=87.5%,求电动机的额定电流和额定负载时的输入功率? 解: (1)额定电流 (2)输入功率 4-15 一台直流发电机技术数据如下:额定功率PN=82kW ,额定电压UN=230V ,额定转速nN=970r/min ,额定效率η=90%,求发电机的额定电流和额定负载时的输入功率? 解: (1)额定电流 (2)输入功率 4-16 已知一台直流电机极对数p=2,槽数Z 和换向片数K 均等于22,采用单叠绕组。试求:(1)绕组各节距;(2)并联支路数。 解:(1)第一节距54 24222y 1=-=±=εp z ,为短距绕组。 单叠绕组的合成节距及换向器节距均为1,即1y ==k y 第二节距415y 12=-=-=y y (2)并联支路数等于磁极数,为4。 4-17 已知直流电机极数2p=6,电枢绕组总导体数N=400,电枢电流Ia=10A ,气隙每极磁通Φ=2.1×10-2Wb ,试求:(1)采用单叠绕组时电枢所受电磁转矩;(2)绕组改为单波保持支路电流ia 不变时的电磁转矩。 解: 电枢绕组为单叠绕组时,并联支路对数a=p=3, 电磁转矩 m N I a pN T a ?=?????=Φ=38.1310021.03 14.3240032π 如果把电枢绕组改为单波绕组, 保持支路电流a i 的数值不变,则电磁转矩也不变,仍为 13.369m N ?,因为无论是叠绕组还是波绕组,所有导体产生的电磁转矩的方向是一致 的, 保持支路电流a i 不变,就保持了导体电流不变,也就保持了电磁转矩不变。 也可以用计算的方法: 单叠绕组时并联支路数为6, 支路电流 A I i a a 6106== 改为单波绕组, 保持支路电流a i 的数值不变,仍为 A 610,而并联支路数为2 (a=1), 电枢电流A i I a a 3 102== 电磁转矩 m N T ?=?????=38.133 10021.0114.324003。 A U P I N N N N 79.207875.022010403 =??==ηkW I U P N N 71.4579.2072201=?=?=A U P I N N N 5.35623010823 =?==KW P P N 11.911==η
实验一 典型环节的MATLAB 仿真 一、实验目的 1.熟悉MATLAB 桌面和命令窗口,初步了解SIMULINK 功能模块的使用方法。 2.通过观察典型环节在单位阶跃信号作用下的动态特性,加深对各典型环节响应曲线的理解。 3.定性了解各参数变化对典型环节动态特性的影响。 二、SIMULINK 的使用 MATLAB 中SIMULINK 是一个用来对动态系统进行建模、仿真和分析的软件包。利用SIMULINK 功能模块可以快速的建立控制系统的模型,进行仿真和调试。 1.运行MATLAB 软件,在命令窗口栏“>>”提示符下键入simulink 命令,按Enter 键或在工具栏单击按钮,即可进入如图1-1所示的SIMULINK 仿真 环境下。 2.选择File 菜单下New 下的Model 命令,新建一个simulink 仿真环境常规模板。 3.在simulink 仿真环境下,创建所需要的系统 三、实验内容 按下列各典型环节的传递函数,建立相应的SIMULINK 仿真模型,观察并记录其单位阶跃响应波形。 ① 比例环节1)(1=s G 和2)(1=s G 实验处理:1)(1=s G SIMULINK 仿真模型
波形图为: 实验处理:2)(1=s G SIMULINK 仿真模型 波形图为: 实验结果分析:增加比例函数环节以后,系统的输出型号将输入信号成倍数放大. ② 惯性环节11)(1+= s s G 和15.01)(2+=s s G 实验处理:1 1 )(1+=s s G SIMULINK 仿真模型
波形图为: 实验处理:1 5.01 )(2+= s s G SIMULINK 仿真模型 波形图为: 实验结果分析:当1 1 )(1+= s s G 时,系统达到稳定需要时间接近5s,当
摘要 本文以捷达EA113汽油机的相关参数作为参考,对四缸汽油机的曲柄连杆机构的主要零部件进行了结构设计计算,并对曲柄连杆机构进行了有关运动学和动力学的理论分析与计算机仿真分析。 首先,以运动学和动力学的理论知识为依据,对曲柄连杆机构的运动规律以及在运动中的受力等问题进行详尽的分析,并得到了精确的分析结果。其次分别对活塞组、连杆组以及曲轴进行详细的结构设计,并进行了结构强度和刚度的校核。再次,应用三维CAD软件:Pro/Engineer建立了曲柄连杆机构各零部件的几何模型,在此工作的基础上,利用Pro/E软件的装配功能,将曲柄连杆机构的各组成零件装配成活塞组件、连杆组件和曲轴组件,然后利用Pro/E软件的机构分析模块(Pro/Mechanism),建立曲柄连杆机构的多刚体动力学模型,进行运动学分析和动力学分析模拟,研究了在不考虑外力作用并使曲轴保持匀速转动的情况下,活塞和连杆的运动规律以及曲柄连杆机构的运动包络。仿真结果的分析表明,仿真结果与发动机的实际工作状况基本一致,文章介绍的仿真方法为曲柄连杆机构的选型、优化设计提供了一种新思路。 关键词:发动机;曲柄连杆机构;受力分析;仿真建模;运动分析;Pro/E
ABSTRACT This article refers to by the Jeeta EA113 gasoline engine’s related parameter achievement, it has carried on the structural design compution for main parts of the crank link mechanism in the gasoline engine with four cylinders, and has carried on theoretical analysis and simulation analysis in computer in kinematics and dynamics for the crank link mechanism. First, motion laws and stress in movement about the crank link mechanism are analyzed in detail and the precise analysis results are obtained. Next separately to the piston group, the linkage as well as the crank carries on the detailed structural design, and has carried on the structural strength and the rigidity examination. Once more, applys three-dimensional CAD software Pro/Engineer establishing the geometry models of all kinds of parts in the crank link mechanism, then useing the Pro/E software assembling function assembles the components of crank link into the piston module, the connecting rod module and the crank module, then using Pro/E software mechanism analysis module (Pro/Mechanism), establishes the multi-rigid dynamics model of the crank link, and carries on the kinematics analysis and the dynamics analysis simulation, and it studies the piston and the connecting rod movement rule as well as crank link motion gear movement envelopment. The analysis of simulation results shows that those simulation results are meet to true working state of engine. It also shows that the simulation method introduced here can offer a new efficient and convenient way for the mechanism choosing and optimized design of crank-connecting rod mechanism in engine. Key words: Engine;Crankshaft-Connecting Rod Mechanism;Analysis of Force;Modeling of Simulation;Movement Analysis;Pro/E
实验一软件仿真器Simulator的使用方法 一、实验目的 1、了解DSP开发系统平台的构成。 2、了解Code Composer Studio 3.3 的操作环境和基本功能。了解DSP软件开发过程。 二、实验要求 按照实验步骤熟练掌握CCS的使用方法。 三、实验设备 PC一台;操作系统为Windows XP;安装Code Composer Studio 3.3 四、实验原理 开发TMS320C5000应用系统一般需要以下几个调试工具来完成: (1)软件集成开发环境(Code Composer Studio3.3):主要完成系统的软件开发和调试。它提供一整套的程序编制、维护、编译、调试环境,能将汇编语言和C语 言程序编译连接生成COFF格式的可执行文件,并能将程序下载到目标DSP上 运行调试。 (2)开发系统(ICETEK 5100 USB):实现硬件仿真调试时与硬件系统的通信,控制和读取硬件系统的状态和数据。 (3)评估模块(ICETEK VC5416-A):提供软件运行和调试的平台和用户系统开发的参照。 五、实验步骤 1、启动Code Composer Studio 3.3 双击桌面“CCS3.3(C5000)”,启动Code Composer Studio 3.3; 2、创建工程 (1)创建新的工程文件 选择菜单Project的“new…”项;在Project Creation 对话框中,在project项输入 volume;单击location项末尾的浏览按钮,改变目录到 C:\ICETEK-VC5416-EDULAB\Lab01-UseCC,单击OK;单击完成;这时建立的是 一个空的工程,展开主窗口左侧工程管理窗口中Projects下新建立的“volume.pjt”,其中各项均为空。 (2)在工程文件中添加程序文件
一.信道均衡的概念 实际的基带传输系统不可能完全满足无码间串扰传输条件,因而码间串扰是不可避免的。当串扰严重时,必须对系统的传输函数 进行校正,使其达到或接近无码间串扰要求的特性。理论和实践表明,在基带系统中插入一种可调滤波器就可以补偿整个系统的幅频,和相频特性从而减小码间串扰的影响这个对系统校正的过程称为均衡,实现均衡的滤波器称为均衡器。 均衡分为频域均衡和时域均衡。频域均衡是从频率响应考虑,使包括均衡器在内的整个系统的总传输函数满足无失真传输条件。而时域均衡,则是直接从时间响应考虑,使包括均衡器在内的整个系统的冲激响应满足无码间串扰条件。 频域均衡在信道特性不变,且传输低速率数据时是适用的,而时域均衡可以根据信道特性的变化进行调整,能够有效地减小码间串扰,故在高速数据传输中得以广泛应用。 时域均衡的实现方法有多种,但从实现的原理上看,大致可分为预置式自动均衡和自适应式自动均衡。预置式均衡是在实际传数之前先传输预先规定的测试脉冲(如重复频率很低的周期性的单脉冲波形),然后按“迫零调整原理”自动或手动调整抽头增益;自适应式均衡是在传数过程中连续测出距最佳调整值的误差电压,并据此电压去调整各抽头增益。一般地,自适应均衡不仅可以使调整精度提高,而且当信道特性随时间变化时又能有一定的自适应性,因此很受重视。这种均衡器过去实现起来比较复杂,但随着大规模、超大规模集成电路和微处理机的应用,其发展十分迅速。 二.信道均衡的应用 1.考虑如图所示的基带等效数据传输系统,发送信号k x 经过ISI 失真信道传输,叠加高斯加性噪声。 图1基带等效数据传输模型 设发送信号采用QPSK 调制,即(1)k x j =±±ISI 信道的冲击响应以向量的形式表示为h 2211[,,,]T L L L h h h --+=???。典型的ISI 信道响应向量有三种: h [0.04,0.05,0.07,0.21,0.5,0.72,0.36,0,0.21,0.03,0.07]T A =--- h [0.407,0.815,0.407]T B = h [0.227,0.46,0.6888,0.46,0.227]T C = k ω为实部与虚部独立的复高斯白噪声,其均值为零,方差为2 ωσ。 2.实现目的