用GCC对AVR编程(以ATmega16为原型)
一、编程界面的建立
GCC是个纯编译器,也就是说,它没有相应的IDE平台,当然,在新版的WINA VR中带一个ProgramNote,但这个平台不是很好用,为了加快效率,我在这里推荐用Sourceinsight,这是能一个把各种资源集中在一起的代码编辑软件,能够对C与C++的关键字做特殊显示,能自动完成变量与函数名的书写,是一个很好用的软件。
1、安装WinA VR 建议安装2007以上的版本,更稳定,Bug更少。在安装的过程中没
有什么特殊的,只要注意一点,建议使用默认的安装目录,否则可能会无法运行。
2、安装SourceInSight,安装完以后再运行Crack进行破解。
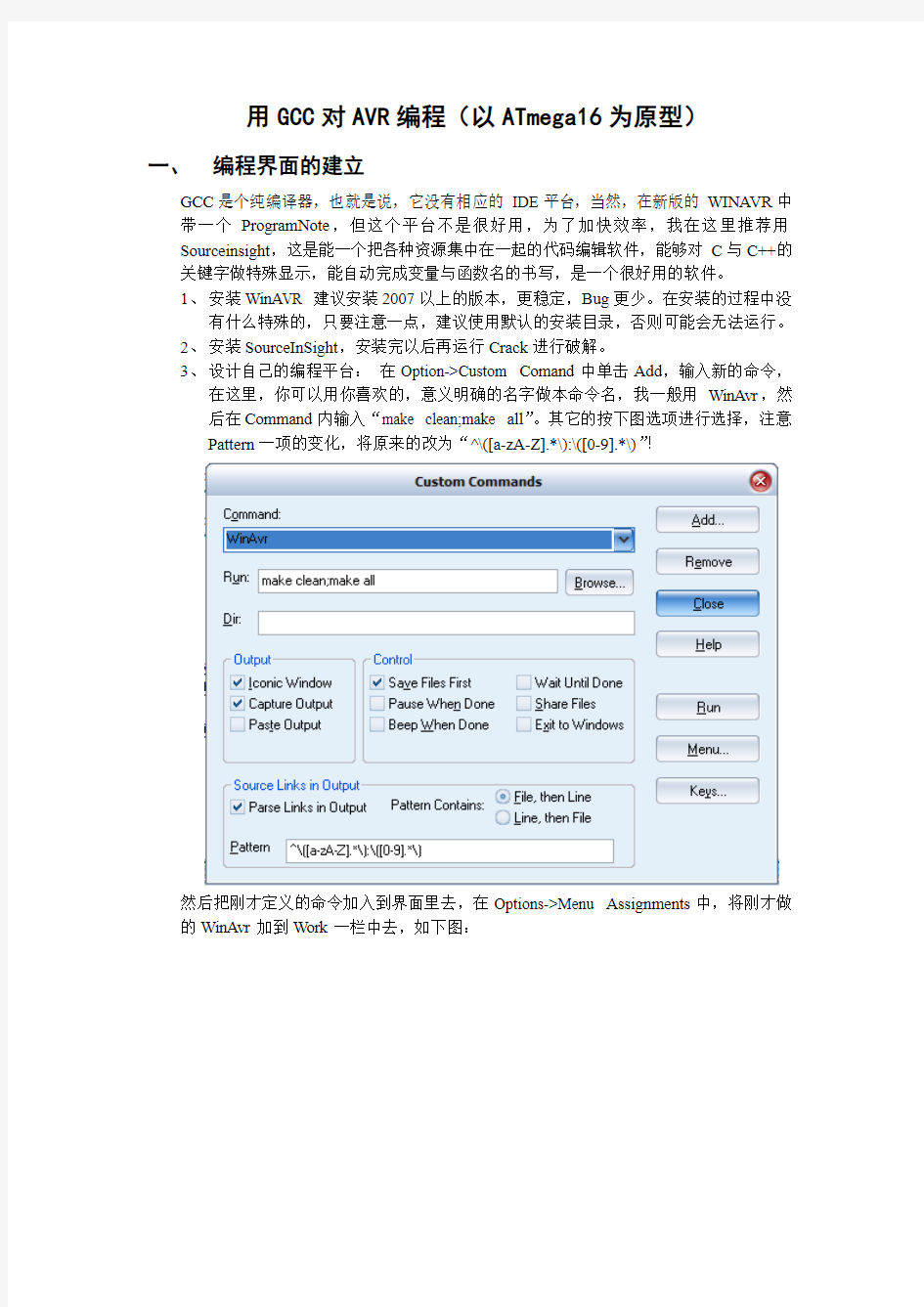
3、设计自己的编程平台:在Option->Custom Comand中单击Add,输入新的命令,
在这里,你可以用你喜欢的,意义明确的名字做本命令名,我一般用WinAvr,然后在Command内输入“make clean;make all”。其它的按下图选项进行选择,注意Pattern一项的变化,将原来的改为“^\([a-zA-Z].*\):\([0-9].*\)”!
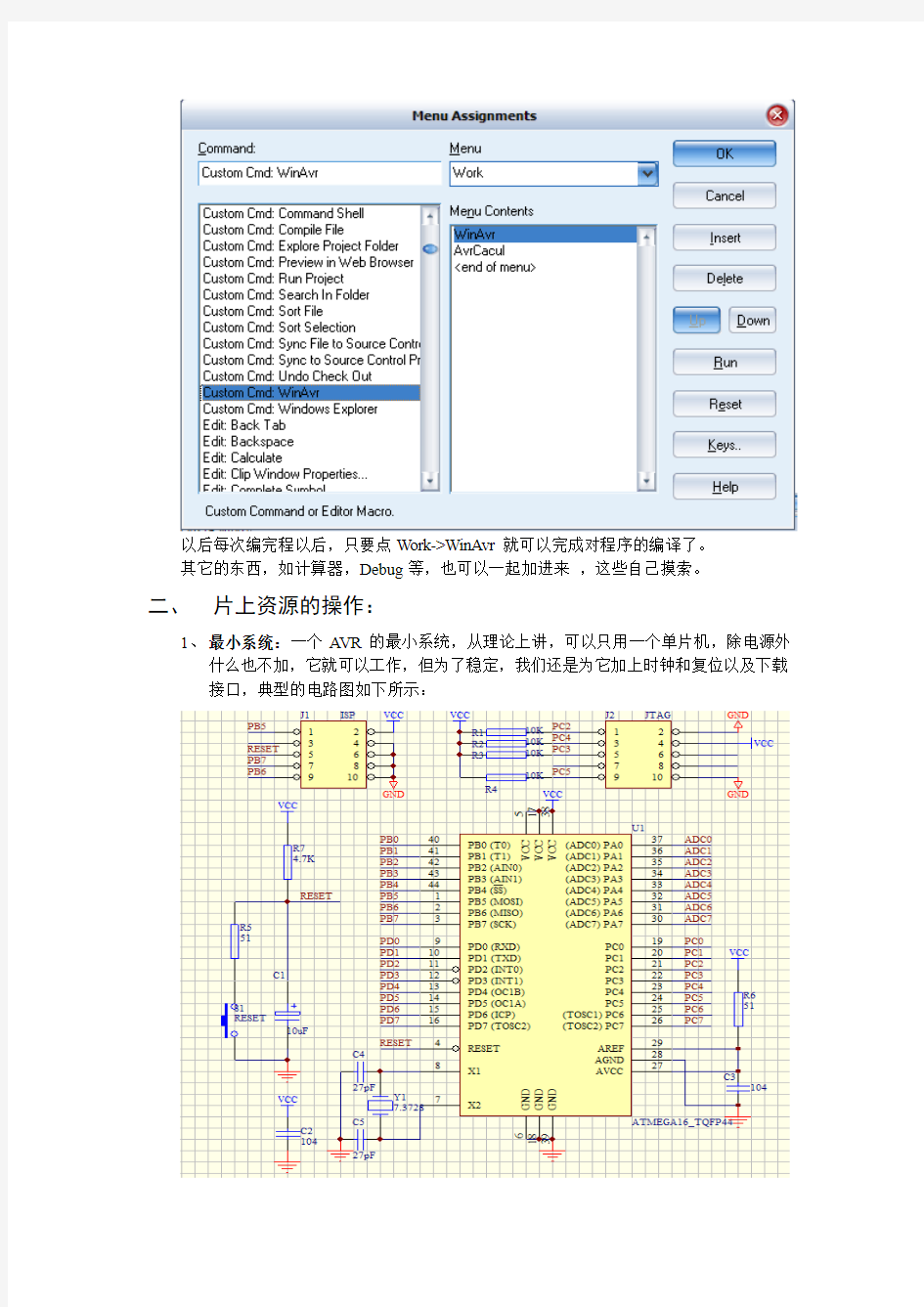
然后把刚才定义的命令加入到界面里去,在Options->Menu Assignments中,将刚才做的WinAvr加到Work一栏中去,如下图:
以后每次编完程以后,只要点Work->WinAvr就可以完成对程序的编译了。
其它的东西,如计算器,Debug等,也可以一起加进来,这些自己摸索。
二、片上资源的操作:
1、最小系统:一个A VR的最小系统,从理论上讲,可以只用一个单片机,除电源外
什么也不加,它就可以工作,但为了稳定,我们还是为它加上时钟和复位以及下载接口,典型的电路图如下所示:
2、I/O口编程:
以前的版本中,对I/O口操作的系统函数很多,但新改版的WinAvr平台,为了与国标接轨,把一些与其它编译平台不兼容的指令给去掉了,在新的平台中没有sbi()与cbi()这两个函数了。在Datasheet中对I/O口的功能描述如下:
为此,Winavr提供一了些操作函数,DDRx、PORTx、PINx,loop_until_bit_is_set(),loop_until_bit_is_clear(),相应有使用方法请看Winavr的帮助文档。
例子:
DDRA=0x00;
PORTA=0xff;
DDRD=0x00;
PORTD=0x02;
DDRG|=0x03;
3、Flash编程:
在头文件中加入#include
例子:
4、Eeprom编程:
在头文件中加入#include
写一个字节用eeprom_write_byte()
读一个字节用eeprom_read_byte()
检查eeprom是否忙用eeprom_is_ready()
例子:
/*
* Function: EepromWr(uint8_t WrAddr,uint8_t WrData)
* Description: Wite a byte to eeprom which in address WrAddr
* Calls: None
* Called By:
* Table Accessed:
* Table Updated:
* Input: WrAddr:address in.WrData:data in.
* Output: None
* Return:
* Others:
*/
uint8_t EepromWr(uint16_t WrAddr,uint8_t WrData)
{
if(g_PasswordCheck==True)
{
while(eeprom_is_ready()==0);
eeprom_write_byte((uint8_t *)WrAddr,WrData);
return 0;
}
else
{
return 1;
}
}
/*
* Function: EeprimRd
* Description: Read a byte from address RdAddr in eeprom
* Calls: None
* Called By:
* Table Accessed:
* Table Updated:
* Input: RdAddr:address which need reads
* Output: The value in targe address
* Return:
* Others:
*/
uint8_t EeprimRd(uint16_t RdAddr)
{
uint8_t temp=0;
while(eeprom_is_ready()==0);
temp=eeprom_read_byte((uint8_t *)RdAddr);
return temp;
}
5、中断
加入头文件#include
中断函数用ISR(Parameter)定义,Parameter为要使用的中断所对应的中断向量,可以在WinAvr的帮助文档中查到,下列为一个简单的定时器溢出中断的书写。
例子:
ISR(TIMER1_OVF_vect)//1s interrupt
{
//Add your code here
TCNT1H=0x00;
TCNT1L=0x00;
}
6、外部中断
Datasheet中对外部中断寄存器的描述如下:
通用中断控制寄存器– GICR
? Bit 7 – INT1: 使能外部中断请求1
当INT1 为'1’,而且状态寄存器SREG 的I 标志置位,相应的外部引脚中断就使能了。MCU通用控制寄存器– MCUCR的中断敏感电平控制1位 1/0 (ISC11与ISC10)决定中断是由上升沿、下降沿,还是INT1 电平触发的。只要使能,即使INT1 引脚被配置为输出,只要引脚电平发生了相应的变化,中断可将产生。
? Bit 6 – INT0: 使能外部中断请求0
当INT0 为'1’,而且状态寄存器SREG 的I 标志置位,相应的外部引脚中断就使能了。MCU通用控制寄存器– MCUCR的中断敏感电平控制0位 1/0 (ISC01与ISC00)决定中断是由上升沿、下降沿,还是INT0 电平触发的。只要使能,即使INT0 引脚被配置为输出,只要引脚电平发生了相应的变化,中断可将产生。
? Bit 5 – INT2: 使能外部中断请求2
当INT2 为'1’,而且状态寄存器SREG 的I 标志置位,相应的外部引脚中断就使能了。MCU通用控制寄存器– MCUCR的中断敏感电平控制2位 1/0 (ISC2与ISC2)决定中断是由上升沿、下降沿,还是INT2 电平触发的。只要使能,即使INT2 引脚被配置为输出,只要引脚电平发生了相应的变化,中断可将产生。
要设置中断正常工作,我们要做如下一些工作
A、设置中断方式
B、在GICR中设置中断使能
C、开全局中断
D、编写中断服务程序
下例为用外部中断1测频的一个例子。
例子:
//outer inerrupt 1
MCUCR|=(1< GICR|=(1< ISR(INTERRUPT1_vect)//Out interrupt 1 { FreqCount+=1; } 7、定时/计数器 T0/T1/T2的功能很强,能做定时器,做计数器,还能产生PWM波形,我在这里只简单的介绍一下定时的功能,Datasheet中对定时功能相关的寄存器的描述如下(以T0为例): T/C 控制寄存器– TCCR0 ? Bit 7 – FOC0: 强制输出比较 FOC0仅在WGM00指明非PWM模式时才有效。但是,为了保证与未来器件的兼容性,在使用PWM 时,写TCCR0 要对其清零。对其写1 后,波形发生器将立即进行比较操作。比较匹配输出引脚 OC0 将按照COM01:0 的设置输出相应的电平。要注意FOC0 类似一个锁存信号,真正对强制输出比较起作用的是COM01:0的设置。FOC0不会引发任何中断,也不会在利用OCR0作为TOP的CTC模式下对定时器进行清零的操作。读FOC0 的返回值永远为0。 ? Bit 6, 3 – WGM01:0: 波形产生模式 这几位控制计数器的计数序列,计数器的最大值TOP,以及产生何种波形。T/C 支持的模式有:普通模式,比较匹配发生时清除计数器模式(CTC),以及两种PWM模式,详见Table 38 与“ 工作模式” 。 ? Bit 5:4 – COM01:0: 比较匹配输出模式 这些位决定了比较匹配发生时输出引脚OC0 的电平。如果COM01:0 中的一位或全部都置位,OC0 以比较匹配输出的方式进行工作。同时其方向控制位要设置为1 以使能输出驱动器。当OC0 连接到物理引脚上时,COM01:0的功能依赖于WGM01:0 的设置。Table 39 给出了当WGM01:0 设置为普通模式或CTC 模式时COM01:0 的功能。 T/C 寄存器– TCNT0 通过T/C 寄存器可以直接对计数器的8 位数据进行读写访问。对TCNT0寄存器的写访问将在下一个时钟阻止比较匹配。在计数器运行的过程中修改TCNT0 的数值有可能丢失一 次TCNT0 和OCR0 的比较匹配。 输出比较寄存器– OCR0 T/C 中断屏蔽寄存器– TIMSK ? Bit 1 – OCIE0: T/C0 输出比较匹配中断使能 当OCIE0和状态寄存器的全局中断使能位I都为”1”时,T/C0的输出比较匹配中断使能。当T/C0 的比较匹配发生,即TIFR 中的OCF0 置位时,中断服务程序得以执行。 ? Bit 0 – TOIE0: T/C0 溢出中断使能 当TOIE0 和状态寄存器的全局中断使能位I 都为”1”时,T/C0 的溢出中断使能。当T/C0 发生溢出,即TIFR 中的TOV0 位置位时,中断服务程序得以执行。 要完成一个定时溢出的功能,我们要进行如下一些操作: A、选择时钟源,分频设置 B、打开Timer溢出中断 C、写TCNTx初始值 D、打开全局中断 E、编写中断服务程序 例子: //Timer1 Initial to count the pluses' period and TCCR1B=0x01;//pre1 TCNT1H=0x00; TCNT1L=0x00; TIMSK|=(1< ISR(TIMER1_OVF_vect)//1s interrupt { TCNT1H=0x00; TCNT1L=0x00; } 8、SPI同步串行通信接口 相关的文档看Datasheet,在此仅给出例子和操作流程: 要完成一个SPI发送与接收功能,要做如下一些工作: A、设置好I/O口功能 B、设置好SPI设置寄存器SPCR C、发送数据时往SPDR中写数据 D、等待SPSR中SPIF位置位 E、返回SPDR中的数据,这就是接收到的数据 例子: void SPIInit(void) { DDRB=0xa8;//0b10101000 PORTB=0xf8; SPCR=(1< //spi enable;master;falling start,rising end;start write,end read;fosc/16 } uint8_t SPITran(uint8_t TranData) { uint16_t i=65535; SPDR=TranData; while(!(SPSR&(1< { i-=1; } return SPDR; } 9、USART异步串行通信接口 Datasheet 中对这个接口的功能寄存器描述如下: USART I/O 数据寄存器– UDR USART 发送数据缓冲寄存器和USART 接收数据缓冲寄存器共享相同的I/O 地址,称为USART 数据寄存器或UDR。将数据写入UDR 时实际操作的是发送数据缓冲器存器(TXB),读UDR 时实际返回的是接收数据缓冲寄存器(RXB) 的内容。 在5、6、7 比特字长模式下,未使用的高位被发送器忽略,而接收器则将它们设置为0。只有当UCSRA寄存器的UDRE标志置位后才可以对发送缓冲器进行写操作。如果UDRE 没有置位,那么写入UDR 的数据会被USART 发送器忽略。当数据写入发送缓冲器后,若移位寄存器为空,发送器将把数据加载到发送移位寄存器。然后数据串行地从TxD 引脚输出。 接收缓冲器包括一个两级FIFO,一旦接收缓冲器被寻址FIFO 就会改变它的状态。因此不要对这一存储单元使用读-修改-写指令(SBI和CBI)。使用位查询指令(SBIC和 SBIS)时也要小心,因为这也有可能改变FIFO的状态。 USART 控制和状态寄存器A – ? Bit 7 – RXC: USART 接收结束 接收缓冲器中有未读出的数据时RXC 置位,否则清零。接收器禁止时,接收缓冲器被刷新,导致RXC 清零。RXC 标志可用来产生接收结束中断( 见对RXCIE位的描述)。 ? Bit 6 – TXC: USART 发送结束 发送移位缓冲器中的数据被送出,且当发送缓冲器 (UDR) 为空时TXC置位。执行发送结束中断时TXC标志自动清零,也可以通过写1 进行清除操作。TXC 标志可用来产生发送结束中断( 见对TXCIE位的描述)。 ? Bit 5 – UDRE: USART 数据寄存器空 UDRE标志指出发送缓冲器(UDR)是否准备好接收新数据。UDRE为1说明缓冲器为空,已准备好进行数据接收。UDRE标志可用来产生数据寄存器空中断(见对UDRIE位的描述)。复位后UDRE 置位,表明发送器已经就绪。 ? Bit 4 – FE: 帧错误 如果接收缓冲器接收到的下一个字符有帧错误,即接收缓冲器中的下一个字符的第一个停止位为0,那么FE 置位。这一位一直有效直到接收缓冲器(UDR) 被读取。当接收到的停止位为1时,FE标志为0。对UCSRA进行写入时,这一位要写0。 ? Bit 3 – DOR: 数据溢出 数据溢出时DOR 置位。当接收缓冲器满(包含了两个数据),接收移位寄存器又有数据,若此时检测到一个新的起始位,数据溢出就产生了。这一位一直有效直到接收缓冲器(UDR) 被读取。对UCSRA 进行写入时,这一位要写0。 ? Bit 2 – PE: 奇偶校验错误 当奇偶校验使能(UPM1 = 1),且接收缓冲器中所接收到的下一个字符有奇偶校验错误时UPE置位。这一位一直有效直到接收缓冲器 (UDR)被读取。对UCSRA进行写入时,这一位要写0。 ? Bit 1 – U2X: 倍速发送 这一位仅对异步操作有影响。使用同步操作时将此位清零。此位置1可将波特率分频因子从16降到8,从而有效的将异步通信模式的传输速率加倍。 ? Bit 0 – MPCM: 多处理器通信模式 设置此位将启动多处理器通信模式。MPCM 置位后,USART 接收器接收到的那些不包含地址信息的输入帧都将被忽略。发送器不受MPCM设置的影响。 USART 控制和状态寄存器B – ? Bit 7 – RXCIE: 接收结束中断使能 置位后使能RXC 中断。当RXCIE 为1,全局中断标志位SREG 置位, UCSRA 寄存器的RXC 亦为1 时可以产生USART 接收结束中断。 ? Bit 6 – TXCIE: 发送结束中断使能 置位后使能TXC中断。当TXCIE为1,全局中断标志位SREG置位,UCSRA 寄存器的TXC 亦为1 时可以产生USART发送结束中断。 ? Bit 5 – UDRIE: USART 数据寄存器空中断使能 置位后使能UDRE中断。当UDRIE 为1,全局中断标志位SREG 置位,UCSRA寄存器的UDRE 亦为1 时可以产生USART 数据寄存器空中断。 ? Bit 4 – RXEN: 接收使能 置位后将启动USART 接收器。RxD 引脚的通用端口功能被USART 功能所取代。禁止接收器将刷新接收缓冲器,并使 FE、DOR及PE标志无效。 ? Bit 3 – TXEN: 发送使能 置位后将启动将启动USART 发送器。TxD 引脚的通用端口功能被USART 功能所取代。 TXEN 清零后,只有等到所有的数据发送完成后发送器才能够真正禁止,即发送移位寄存器与发送缓冲寄存器中没有要传送的数据。发送器禁止后,TxD引脚恢复其通用I/O功能。 ? Bit 2 – UCSZ2: 字符长度 UCSZ2与UCSRC寄存器的UCSZ1:0结合在一起可以设置数据帧所包含的数据位数(字符长度)。 ? Bit 1 – RXB8: 接收数据位8 对9 位串行帧进行操作时,RXB8 是第9 个数据位。读取UDR 包含的低位数据之前首先要读取RXB8。 ? Bit 0 – TXB8: 发送数据位8 对9 位串行帧进行操作时,TXB8是第9个数据位。写UDR 之前首先要对它进行写操作。USART 控制和状态寄存器C – UCSRC寄存器与UBRRH寄存器共用相同的I/O地址。对该寄存器的访问,请参见“访问UBRRH/ UCSRC 寄存器” 。 ? Bit 7 – URSEL: 寄存器选择 通过该位选择访问UCSRC 寄存器或UBRRH 寄存器。当读UCSRC 时,该位为1 ;当 写UCSRC 时, URSEL 为1。 ? Bit 6 – UMSEL: USART 模式选择 通过这一位来选择同步或异步工作模式。 ? Bit 5:4 – UPM1:0: 奇偶校验模式 这两位设置奇偶校验的模式并使能奇偶校验。如果使能了奇偶校验,那么在发送数据,发送器都会自动产生并发送奇偶校验位。对每一个接收到的数据,接收器都会产生一奇 偶值,并与UPM0 所设置的值进行比较。如果不匹配,那么就将UCSRA中的PE 置位。 ? Bit 3 – USBS: 停止位选择 通过这一位可以设置停止位的位数。接收器忽略这一位的设置 ? Bit 2:1 – UCSZ1:0: 字符长度 UCSZ1:0与UCSRB寄存器的 UCSZ2结合在一起可以设置数据帧包含的数据位数(字符长度)。 ? Bit 0 – UCPOL: 时钟极性 这一位仅用于同步工作模式。使用异步模式时,将这一位清零。UCPOL设置了输出数据的改变和输入数据采样,以及同步时钟XCK之间的关系。 USART 波特率寄存器– UBRRL UCSRC寄存器与UBRRH寄存器共用相同的I/O地址。对该寄存器的访问,请参见P150“访 问UBRRH/ UCSRC 寄存器” 。 ? Bit 15 – URSEL: 寄存器选择 通过该位选择访问UCSRC 寄存器或UBRRH 寄存器。当读UBRRH 时,该位为0 ;当 写UBRRH 时, URSEL 为0。 ? Bit 14:12 –保留位 这些位是为以后的使用而保留的。为了与以后的器件兼容,写UBRRH 时将这些位清零。 ? Bit 11:0 – UBRR11:0: USART 波特率寄存器 这个12 位的寄存器包含了USART 的波特率信息。其中UBRRH 包含了USART 波特率 高4位,UBRRL 包含了低8 位。波特率的改变将造成正在进行的数据传输受到破坏。 写 UBRRL 将立即更新波特率分频器。 要进行异步串行通信,要进行如下一些操作: A、设置UCSRB的一些值 B、设置波特率 C、设置UCSRC的参数 D、发送时把数据写入UDR寄存器 E、等待UCSRA中的TXC位置位 F、把UCSRA的TXC位清零 G、编写接收中断服务程序 例子: void Uart_Init(void) { UCSRB|=(1< UBRRL=47; UBRRH=0x00;//band rate 9600 UCSRC|=(1< sei(); } int Uart_Putchar(char C) { cli(); UDR=C; loop_until_bit_is_set(UCSRA,TXC); sbi(UCSRA,TXC); sei(); return 0; } ISR(UART_RECV_vect)// { uint8_t temp=UDR; } 10、TWI接口 主要用于Eeprom,时钟芯片等一些芯片的操作 DataSheet中对TWI寄存器的描述: TWI 比特率寄存器– TWBR ? Bits 7..0 – TWI 比特率寄存器 TWBR 为比特率发生器分频因子。比特率发生器是一个分频器,在主机模式下产生SCL时钟频率。比特率计算公式请见P166“比特率发生器单元” 。 TWI 控制寄存器– TWCR TWCR 用来控制TWI操作。它用来使能TWI,通过施加START到总线上来启动主机访问,产生接收器应答,产生STOP 状态,以及在写入数据到TWDR寄存器时控制总线的暂停等。 这个寄存器还可以给出在TWDR 无法访问期间,试图将数据写入到TWDR 而引起的写入冲突信息。 ? Bit 7 – TWINT: TWI 中断标志 当TWI完成当前工作,希望应用程序介入时TWINT置位。若SREG的I标志以及TWCR寄存器的TWIE 标志也置位,则MCU 执行TWI 中断例程。当TWINT 置位时,SCL 信号的低电平被延长。TWINT 标志的清零必须通过软件写"1” 来完成。执行中断时硬件不会自动将其改写为"0”。要注意的是,只要这一位被清零,TWI 立即开始工作。因此,在清零TWINT 之前一定要首先完成对地址寄存器TWAR,状态寄存器TWSR,以及数据寄存器TWDR的访问。 ? Bit 6 – TWEA: 使能TWI 应答 TWEA标志控制应答脉冲的产生。若TWEA 置位,出现如下条件时接口发出ACK 脉冲: 1. 器件的从机地址与主机发出的地址相符合 2. TWAR 的TWGCE 置位时接收到广播呼叫 3. 在主机/从机接收模式下接收到一个字节的数据 将TWEA 清零可以使器件暂时脱离总线。置位后器件重新恢复地址识别。 ? Bit 5 – TWSTA: TWI START 状态标志 当CPU 希望自己成为总线上的主机时需要置位TWSTA。TWI 硬件检测总线是否可用。若总线空闲,接口就在总线上产生START 状态。若总线忙,接口就一直等待,直到检测到一个STOP 状态,然后产生START 以声明自己希望成为主机。发送START 之后软件必须清零TWSTA。 ? Bit 4 – TWSTO: TWI STOP状态标志 在主机模式下,如果置位TWSTO,TWI 接口将在总线上产生STOP 状态,然后TWSTO自动清零。在从机模式下,置位TWSTO 可以使接口从错误状态恢复到未被寻址的状态。此时总线上不会有STOP 状态产生,但TWI 返回一个定义好的未被寻址的从机模式且释放SCL 与SDA为高阻态。 ? Bit 3 – TWWC: TWI 写碰撞标志 当TWINT 为低时写数据寄存器TWDR 将置位TWWC。当TWINT 为高时,每一次对TWDR 的写访问都将更新此标志。 ? Bit 2 – TWEN: TWI 使能 TWEN 位用于使能TWI操作与激活TWI接口。当TWEN位被写为"1”时,TWI引脚将I/O引脚切换到SCL 与SDA 引脚,使能波形斜率限制器与尖峰滤波器。如果该位清零, TWI接口模块将被关闭,所有TWI 传输将被终止。 ? Bit 1 – Res: 保留 保留,读返回值为”0”。 ? Bit 0 – TWIE: 使能TWI 中断 当SREG 的I 以及TWIE 置位时,只要TWINT 为"1”, TWI 中断就激活。 TWI 状态寄存器– TWSR ? Bits 7..3 – TWS: TWI 状态 这5 位用来反映TWI 逻辑和总线的状态。不同的状态代码将会在后面的部分描述。注意 从TWSR 读出的值包括5 位状态值与2 位预分频值。检测状态位时设计者应屏蔽预分频 位为"0”。这使状态检测独立于预分频器设置。在无特殊声明的情况下,在手册中使用该 方法。 ? Bit 2 – Res: 保留 保留,读返回值为"0”。 ? Bits 1..0 – TWPS: TWI 预分频位 这两位可读/ 写,用于控制比特率预分频因子。 TWI 数据寄存器– TWDR TWI的使用比较复杂,而且不同的器件使用的方法也不太一样,在这里就给出一个例子,是读写串行Eeprom的一个程序,供大家参考。 void i2c_NAck(void) { TWCR = (1< while (!(TWCR &(1< } //write data to 24cxx //paramater: *p_rsc:master output data ram address pointer; ad_dst:iic write address(2 byte); num:number of datas //note: ad_dst: ad_dst+(num-1) must less than highest addrss; num>0; void wt24c(uint8_t *p_rsc, uint16_t ad_dst, uint16_t num) { uint16_t n; n=ad_dst/PAGE_SIZE; //the sub address if(n) n=(uint32_t)PAGE_SIZE*(n+1)-ad_dst; else n=PAGE_SIZE-ad_dst; if(n>=num) //if ad_dst's address >= ad_dst + num, then write num { wt24c_fc(p_rsc, ad_dst, num); if(syserr!=0) return; } else //if ad_dst's end address< ad_dst + num, write ad_dst 's end - ad_dst { p_rsc=wt24c_fc(p_rsc, ad_dst, n); if(syserr!=0) return; num-=n; //fresh remain number of datas ad_dst+=n; //refresh reamain datas' address //write remain datas while(num>=PAGE_SIZE) //PAGE_SIZE write { p_rsc=wt24c_fc(p_rsc, ad_dst, PAGE_SIZE); if(syserr!=0) return; num-=PAGE_SIZE; //fresh remain number of datas ad_dst+=PAGE_SIZE; //refresh reamain datas' address } if(num) //send the last < page_size data to eeprom wt24c_fc(p_rsc, ad_dst, num); } } //24cxx read //paramater: *p_dst:host ram address pointer; ad_rsc:output iic address?; num //not: ad_dst+(num-1) void rd24c(uint8_t *p_dst, uint16_t ad_rsc, uint16_t num) { uint8_t t=0; // #if e2prom<32 t=(((ad_rsc>>8)&0x07)<<1); // t<<=1; // #endif i2cstart(); //send start signal if(i2cwt(W_ADD_COM+t)==SLAW)//send SLA_W, write instruction and data { // #if e2prom>16 // i2cwt(ad_rsc>>8); //ad_rsc //#endif i2cwt(ad_rsc); //ad_rscL i2cstart(); //send start signal i2cwt(R_ADD_COM+t); //send SLA_R, read command and address for(;num>0;num--) { *p_dst=i2crd(); //read a byte p_dst++; } } else syserr=ERR_SLAW; //error i2c_NAck(); i2cstop(); Delay_nms(10); } //?24Cxxwrite function:wt24c_h() used //return n byte wite ram prointer uint8_t * wt24c_fc(uint8_t *p, uint16_t ad, uint8_t n) { uint8_t t=0; // #if e2prom<32 // t=ad>>8; // t<<=1; // #endif i2cstart(); //start if(i2cwt(W_ADD_COM+t)==SLAW)//SLA_W, write instruction address { // #if e2prom>16 // i2cwt(ad>>8); //ad_dst?????? // #endif i2cwt(ad); //ad_dst write tio low byte address for(;n>0;n--) //send input datas { i2cwt(*p); p++; } } else syserr=ERR_SLAW; //error i2cstop(); Delay_nms(6); //delay 6ms return(p); } //------------------------------Commer iic function-------------------------- //iic start void i2cstart(void) { TWCR= (1< while (!(TWCR &(1< } //write a byte to data,and reurn TWI status uint8_t i2cwt(uint8_t a) { TWDR = a; TWCR =(1< while (!(TWCR & (1< return(TWSR&0xf8); } //i2c read function //read a byte uint8_t i2crd(void) { TWCR= (1< while (!(TWCR & (1< return(TWDR); } //stop situation void i2cstop(void) { TWCR = (1< } //****************************end iic******************** 11、模数转换器ADC 在Datasheet中对此器件的寄存器有这样一些: ADC 多工选择寄存器– ADMUX ? Bit 7:6 – REFS1:0: 参考电压选择 如Table 83 所示,通过这几位可以选择参考电压。如果在转换过程中改变了它们的设置,只有等到当前转换结束(ADCSRA 寄存器的ADIF 置位) 之后改变才会起作用。如果在AREF 引脚上施加了外部参考电压,内部参考电压就不能被选用了。 ? Bit 5 – ADLAR: ADC 转换结果左对齐 ADLAR影响ADC转换结果在ADC数据寄存器中的存放形式。ADLAR置位时转换结果为左 对齐,否则为右对齐。ADLAR 的改变将立即影响ADC 数据寄存器的内容,不论是否有 转换正在进行。关于这一位的完整描述请见P206“ADC 数据寄存器– ADCL 及ADCH” 。 你真的了解树莓派吗?来看看它都适合哪类开发者 [导读]什么是树莓派?https://www.doczj.com/doc/926781452.html,网站上大抵是这样描述的,树莓派是低成本的只有信用卡大小的卡片式电脑,可以连接计算机显示器或电视机,能够支持标准键盘和鼠标。 树莓派是“Raspberry Pi”的中文译名,简写为RPi,或者RasPi/RPi。 什么是树莓派?https://www.doczj.com/doc/926781452.html,网站上大抵是这样描述的,树莓派是低成本的只有信用卡大小的卡片式电脑,可以连接计算机显示器或电视机,能够支持标准键盘和鼠标。它适合于各个年龄段的人学习使用,比如能够用来学习如何用Scratch和Python这样的语言来编程。它能够做一切你期望台式电脑能做的事,从浏览网页、播放高清视频,到制作电子表格、进行文字处理,还能够玩游戏。 更重要的是,树莓派具有与外部世界互动的能力,并已经广泛用于一些数字设备项目,从音乐设备到环境监控,DIY手机,甚至基于树莓派的超级电脑等等。 树莓派是一款基于Linux系统的单板机电脑。它由英国的树莓派基金会所开发,目的是以低价硬件及自由软件刺激在学校的基本的计算机科学教育。树莓派被赋予的希望是,能够帮助全世界的孩子学习编程,并能够了解计算机是如何工作的。(树莓派创始人Eben Upton 分享树莓派发展历程与创新应用的点点滴滴) 目前为止,通过开发者社区的共同努力,Raspberry Pi已经可以运行 WebKit、LibreOffice、Scratch、Pixman、XBMC/Kodi、libav、PyPy、Raspbian、Ubuntu 等众多开源系统和程序。 树莓派的特点是:具有强大的运算性能,以及开源硬件的易用性。 树莓派装机及系统优化 1树莓派安装 使用noobs安装,下载noobs后,解压到根目录即可。上电启动自动可安装。 2root权限获取 sudo su 命令可切换至root权限。 3清理默认的套件 以下指令来移除套件,IBM的Node-RED、Mathematica、Scratch、Sonic Pi、Minecraft Pi。 sudo apt-get remove --purge --auto-remove nodered wolfram-engine scratch scratch2 scratch3 sonic-pi minecraft-pi 再移除两套Java IDE:BlueJ与Greenfoot,一套轻量型IDE:Geany: 移除掉Sense HAT Emulator,smartsim,python-games sudo apt-get remove --purge --auto-remove python-sense-emu python3-sense-emu python-sense-emu-doc sense-emu-tools smartsim python-games 移除掉Email软体Claws Mail、浏览器Epiphany、浏览器Dillo。 sudo apt-get remove --purge --auto-remove claws-mail epiphany-browser dillo 移除掉很大的Libre Office(555M),记得加上星号,才会移除掉全部:sudo apt-get remove --purge --auto-remove libreoffice* 4安装软件以及卸载查找方法 查找软件:apt-cache search xxxx 查看软件是否已安装:dpkg -l|grep xxxx 安装软件:sudo apt-get install xxxx 卸载软件卸载并清除配置:sudo apt-get remove --purge xxxx 比较彻底的卸载方式:sudo apt-get remove --purge --auto-remove xxxx 1 !Vijeo Citect 快速入门教程 2 高级配置 本教程将带领您创建并运行一个Vijeo Citect 的工程。 目录 1介绍 (3) 1.1课程目的 (3) 1.1.1商标注册 (3) 2安全验证 (4) 3设备导入 (6) 4超级精灵 (14) 4.1创建超级精灵 (14) 5精灵 (25) 5.1创建精灵 (25) 5.2在图形页面上使用精灵 (31) 6标签数据质量 (35) 6.1标签覆盖 (35) 6.2控制禁止 (42) 1介绍 欢迎您购买并使用Vijeo Citect系列产品。该教程是Vijeo Citect快速入门教程1的扩展教程,以教程1中的概念及项目配置为基础。如果您还未完成快速入门教程1的内容,请从现在开始,并在开始本教程的学习前,完成教程1的内容。 1.1课程目的 该教程将介绍Vijeo Citect产品的高级配置: 安全设置——电子签名及多用户验证 超级精灵——简化项目配置及维护 精灵——简化项目配置及维护 标签数据质量及标签管理 项目对象块创建中的设备导入过程 1.1.1商标注册 Vijeo Citect, Vijeo Citect Lite, Vijeo Historian, Vijeo Designer, Vijeo Look, AMPLA都是施耐德电气的注册产品。 Windows 是微软公司的注册产品。其他品牌和产品名称均为其品牌所有权公司的注册产品。 2安全验证 Vijeo Citect中的安全验证大大简化了数字签名与多用户验证功能。本练习将为泵1设置签名验证,要求用户在切换到手动模式之前输入签名。(设置Pump_1_Mode值为1)。 在图形编辑器中打开“我的页面”,双击“手动”按钮,在“输入”标签中修改指令为: MultiSignatureTagWrite(“Pump_1_Mode”, ”1”, ””, ”kernel”, “”, “”, “”) Tellmewhen,顾名思义,告诉我什么时候。 扩展出来就成了,告诉我什么时候用什么技能。设置好的TMW几乎可以替代任何输出插件。 下面就让我来一步步讲解如何设置tellmewhen 下载插件这样的步骤就不用说了。 在界面里面的插件可以看到这些设置 下面来新增一个分组,增加的就是图标 在这里可以看到在什么时候显示,显示多少个。 以武器战为例。这个的意思就说你的天赋是武器的时候启用这个分组。至于主副天赋。这个就是针对的双武器来说的了 我们还把行设置为4.这样图标就成了4X4,16个。 这个就是设置好的图标块 然后我们就要思考了。武器战的第一步是干嘛?很多人会不约而同的想到:冲锋 别忘了还有一个10%攻击强度的BUFF啊。 这个BUFF属于增益效果。于是我们就要这样设置。 在战斗怒吼的时候可以看到很多的类似的光环。 设想一下。如果队伍里面有猎人强击光环了。你还有必要战斗怒吼一下么? 所以我们要把increaseAP设置为监控的BUFF 下面选择不存在 意思就是:在你自身没有攻击强度提高的BUFF的时候战斗怒吼的图标自然就亮起来了结果就是这样: 接下来一个技能重点介绍:斩杀 很简单的斩杀。 Tellmewhen都为这类触发技能提供了模板了。是的,很好用 冷却检测。距离检测。能量检测。就分别对应了当这些条件不满足的时候不显示斩杀。 可是我想说,这样设置出来的斩杀完全是一个非常菜的水平。他会在你可以斩杀的时候斩杀图标就亮起来了。 你们觉得这个科学么? 在我们考虑斩杀的时候都是这样的情况下: 一、怒气大于90% 二、巨人打击期间,一直斩杀。 这个就要用到tellmewhen的条件判断了 我们如下设置: 袀螄薈薀聿莄膅配置 1 蚂螅荿薀芃蚆莈装机配置外观预览 ?芅芈肁肂膇蒁莀罗技MK200键鼠套装 ?肇薁膄蚈荿螁螅飞利浦206V3LSB/93 ?肂肃袄膈节蚄螆先马奇迹3 袂莅肇螃蒃芇艿网友配置方案打印配置单 ?袆膀罿薅螈肈薃配置清单 ?羈蒀蒄羄羇螀肅参数 ?羁芃蒅肀芀袃莇兼容与接口 配置品牌型号 数量 当 时的单价 现 在的单价商家数量 CPU Intel 酷睿i3 3220(散) 1 ¥ 680 ¥695 194家商家 主板七彩虹战斧C.B75K V21 1 ¥ 399 ¥39956家商家 内存金士顿4GB DDR3 1600 1 ¥ 150 ¥175 家商家 硬盘 希捷Barracuda 500GB 7200转 16MB SATA3(ST500DM002) 1 ¥ 330 ¥325 家商家 显卡七彩虹iGame650 烈焰战神U D5 1024M 1 ¥ 799 ¥799 176家商家机箱先马奇迹3 1 ¥ 109 ¥109 76家商家电源先马超影450 1 ¥ 169 ¥169 40家商家散热器超频三黄海豪华版(S90F) 1 ¥ 99 ¥99 35家商家显示器飞利浦206V3LSB/93 1 ¥ 740 ¥740 110家商家键鼠装罗技MK200键鼠套装 1 ¥ 85 ¥85 90家商家复制表格(可以粘贴到论坛、blog、淘宝等) 合计金额:3560元 配置2 配置名称数量单价质保 CPU AMD 速龙II X4 740 CPU (盒) 四核核 主频3.2GHz 功耗65W/不集成显卡 ×1¥430三年保修 主板微星FM2-A55M-E33 主板(FM2架 构,VGA+HDMI接口) 促销中! ×1¥399三年保修 内 存 金士顿4GB 内存DDR3 1600 (单条)×1¥197三年保修 显卡华硕HD6570-MG-1GD3 显卡(保三 年,名爵版,64bit,频率 650/1200MHz,VGA/HDMI/DVI) ×1¥378 1年包换良 品,3年保 修 硬盘希捷500GB 硬盘7200转16M×1¥333 二年质保, 三年有限 保修 显示器宏基G206HQLb 19.5寸显示器 (LED,1600x900,VGA) ×1¥625 整机1年, 液晶屏按 系列1-3 年,其它3 年 机箱酷泽5008B/R 机箱(2个固态硬盘位, 长显卡) ×1¥110 软件下载 1.快速开机指南 英文版.pdf 中文版.doc 2.SD卡格式化工具,可选。 SD Formatter 4.0 for SD/SDHC/SDXC 3.NOOBS(ver:1.3.9),可选。 NOOBS.zip NOOBS自身并不是操作系统,而是树莓派官方推荐的启动管理软件。通过NOOBS,可以免镜像刷写工具安装系统,并可以不拔卡在树莓派上直接重装系统。官方推荐第一次使用树莓派,要用NOOBS安装系统。但NOOBS占用卡空间较大,需要特殊的分区结构,这都是存在的问题。是否使用NOOBS,可以自行考虑。个人的建议是手动下载镜像和刷写工具创建SD卡,不要理睬NOOBS。 4.镜像烧录工具 Win32DiskImager v0.9.zip (https://www.doczj.com/doc/926781452.html,) USB Image Tool(使用介绍) 5.操作系统 根据偏好选择下列之一。 5.1 Raspbian “wheezy” 是Debian7.0在ARMv6的编译版,加上针对树莓派深度定制的硬件驱动与软件程序。官方推荐系统。如果你第一次使用树莓派,请下载这个。Debian的软件策略偏保守,稳定第一,升级是次要的。 下载链接:https://www.doczj.com/doc/926781452.html,/raspbian_latest 默认帐号:Username: pi Password: raspberry 发布日期:2014-06-20 5.2 OpenELEC 运行快、且用户体验友好的一款XBMC媒体中心。 下载链接:https://www.doczj.com/doc/926781452.html,/openelec_latest 发布日期:2014-06-14 5.3 Pidora Pidora是社区对Fedora在树莓派上的移植。不是Fedora官方版,但被Fedora官网推荐用于树莓派。Pidora基于Fedora 18,采用另一个轻量桌面环境XFCE。Fedora的软件策略相比于Debian,是略偏向先锋的。Fedora能用到版本稍新,但也经受过实测调试的软件包。 下载链接:https://www.doczj.com/doc/926781452.html,/pidora_latest 【IT168 使用技巧】KMPLAYER(以下简称KMP)是播放高清视频最好的也是最常用的软件之一,以功能强大而闻名,更值得称道的是,它是一款完全免费的媒体播放器。KMP内置了非常丰富的解码器和滤境,甚至不需要做任何设置就可以直接播放您系统上的所有影音文件。而KMP支持调用外部滤镜、内置字幕支持、资源占用率低等等这些优秀的特点也使得KMP成为广大的HDTV迷们最常用的媒体播放器。毫不夸张地说,只要你掌握了使用KMP的技巧,其他所有的媒体播放器都可以抛到一边去了。 KMP的最大特色就是向用户提供非常详细的定制功能,只需掌握了这些设置技巧,几乎可以实现任何想要达到的目的和效果。但是,从另一方面来说,强大的可定制功能也导致的KMP的设置异常复杂,初次接触KMP的网友无不被KMP错综复杂的设置搞得晕头转向。对新手来说,这的确是一个相当令人头疼的问题。下面,笔者将自己在KMP的使用过程中总结出来的一些经验和技巧分享给大家,希望对大家有一点帮助。 版本的选择 目前网络上可供下载的KMP版本相当之多,除了官方的汉化版之外,还有很多网友DIY的版本,这些版本相比于官方版本,捆绑了更多的插件和滤境,因而可以支持更多的媒体格式和实现更多的功能。 下面是目前网络上比较常见的几个版本,关于各版本的详细介绍请参看各自的说明文档: 官方无插件安装正式版 这个是官方提供的汉化安装版,包含官方提供的所有解码器和滤境,不附带任何商业的、收费的第三方解码器和滤境。如果需要使用扩展、插件和外部解码器,必须自行安装。 WWWO版 WWWO版的KMP以实用为主要目的,力求最小的资源占用。需要单独安装“real alternative”解码包才能播放real流媒体文件(也就是网络视频)。这个版本适合电脑配置不高,但是又想使用KMP全部功能的朋友。 莫尼卡版 莫尼卡版集成了几乎所有的插件和解码器,因此可以通吃所有的媒体格式,包括网络视频(流媒体)。这个版本适合想插件和解码器一步到位的朋友使用。 绿色版 绿色版,顾名思义,就是解压后可以直接使用的版本。这个版本也集成了解码器,但是插件和扩展不如莫尼卡版多。喜欢绿色软件的推荐使用这个版本。 终极解码 1:树莓派介绍: Raspberry Pi(中文名为“树莓派”,简写为RPi,或者RasPi/RPi)是为学生计算机编程教育而设计,只有信用卡大小的卡片式电脑,其系统基于Linux。 树莓派由注册于英国的慈善组织“Raspberry Pi 基金会”开发,Eben·Upton/埃·厄普顿为项目带头人。2012年3月,英国剑桥大学埃本·阿普顿(Eben Epton)正式发售世界上最小的台式机,又称卡片式电脑,外形只有信用卡大小,却具有电脑的所有基本功能,这就是Raspberry Pi电脑板,中文译名"树莓派"!这一基金会以提升学校计算机科学及相关学科的教育,让计算机变得有趣为宗旨。基金会期望这一款电脑无论是在发展中国家还是在发达国家,会有更多的其它应用不断被开发出来,并应用到更多领域。 一句话:树莓派是一个卡片大小的开发板,上面可以运行Linux系统,我们可以用它开发我想要的设备。 2:树莓派的种类 A型:1个USB、无有线网络接口、功率2.5W,500mA、256MB RAM(基本已经见不到了)B型:2个USB、支持有线网络、功率3.5W,700mA、512MB RAM、26个GPIO(市售还有很多)。 B+型:4个USB口、支持有线网络,功耗1W,512M RAM 40个GPIO(2014新出的,推荐使用) 3:树莓派参数: B型: 处理器BroadcomBCM2835(CPU,GPU,DSP和SDRAM,USB) CPU ARM1176JZF-S核心(ARM11系列)700MHz GPU Broadcom VideoCrore IV,OpenGL ES 2.0,1080p 30 h.264/MPEG-4 AVC高清解码器 内存512MByte USB 2.02(支持USB hub扩展) 影像输出Composite RCA(PAL & NTSC),HDMI(rev 1.3 & 1.4),raw LCD Panels via DSI 14 HDMI resolution from 640x350 to 1920x1200 plus various PAL andNTSC standards 音源输出 3.5mm插孔,HDMI 板载存储SD/MMC/SDIO卡插槽 网络接口10/100以太网接口 外设8xGPIO、UART、I2C、带两个选择的SPI总线,+3.3V,+5V,ground(负极)额定功率700mA(3.5W) 电源输入5V / 通过MicroUSB或GPIO头 总体尺寸85.60 x 53.98 mm(3.370 x 2.125 in) 操作系统Debian GNU/linux,Fedora,Arch Linux ARM,RISC OS, XBMC B+改进 ADAM-4117快速入门手册 一、ADAM-4117概述 ADAM-4117是16位A/D、8通道的模拟量输入模块,可以采集电压、电流 等模拟量输入信号,并且为所有通道都提供了独立的可编程的输入范围。在工业 测量和监控的应用中,ADAM-4117具有良好的性价比。它不仅能够用于恶劣的 环境中,而且还具有更加坚固型的设计。 ADAM-4117支持8路差分信号,还支持MODBUS协议。在模块的右侧有 一个白色的拨码开关来设置初始化状态(INIT*)和正常工作状态的切换。ADAM-4117具有4-20ma、0-20ma、±20ma等电流量程,当您需要测量电流时, 不需要外接电阻,只需打开盒盖,按照电路板上的标识来设置跳线即可。 ADAM-4117 ADAM-4117一分钟快速入门: ?ADAM-4117可以将电压电流信号 转换为RS-485信号,传输到电脑 或PLC中 ?一般电脑都具有RS-232接口,通 过RS-232到RS-485的转换器连接 ADAM-4117 ?以ADAM-4520为例,电脑通过直 连线连接ADAN-4520,4520的 DATA+连接4117的DATA+,4520 的DATA-连接4117的DATA-。连 线完成后,安装测试软件,通过测 试软件对4117进行测试和配置 ?ADAM-4117和ADAM-4520都需要 供电,4117通电之后,指示灯呈 红色闪烁状。 ?更加详细的描述参见下面的内容。 ……to be continued…… 规格说明 AI 模拟量输入 ●有效分辨率:16位 ●通道:8路差分,可独立设置量程 ●高共模电压:200Vdc ●通讯协议:ASCII命令,Modbus协议 ●输入类型:mV,V(支持单双极性),mA ●输入量程:0~150mV, 0~500mV, 0~1V, 0~5V, 0~10V, 0~15V,±150 mV, ±500 mV, ±1V, ±5 V, ±10 V, ±15V, 0~20mA,±20 mA, 4~20mA ●隔离电压:3000VDC ●过压保护:±60V ●采样速率:10/100 采样点每秒(通过测试软件设置) ●输入内阻:电压20MΩ,电流120Ω ●精确度:电压模式:±0.1% or better 电流模式:±0.2% or better ●零点漂移:±6μV/℃ ●跨度漂移:±25 ppm/° C ●共模抑制(CMR)@50/60Hz dB min ●内置看门狗 ●内置TVS/ESD保护 ●功耗1.2W@24VDC 跳线设置: 当ADAM-4117测量电流时,需要跳线。将盒盖拆开,可以看到电路板上有八个跳线,按照下图或者按照电路板上的标识进行跳线,测量电流需要将跳线跳到“I”端,测量电压则需要保持跳线在“V”端的出厂设置不变。跳线完成后,可以使用万用表测量V+与V-之间,正常应该有120Ω的电阻。 决定电脑运行速度快慢的硬件因素计算机基础知识 1、一台计算机运行速度的快慢,是由硬件和软件两个方面决定的.本文,给大家介绍一下,决定电脑运行速度快码的硬件因素. 决定电脑运行速度快慢的因素有: CPU的频率 内存的大小 显卡的显存和位宽 硬盘的读取写入速度 主板的总线带宽 还有,以上这些设备上的二级缓存. ①CPU频率 所谓主频,也就是CPU正常工作时的时钟频率,从理论上讲CPU的主频越高,它的速度也就越快,因为频率越高,单位时钟周期内完成的指令就越多,从而速度也就越快了。但是由于各种CPU内部结构的差异(如缓存、指令集),并不是时钟频率相同速度就相同,稍有差异。但,总的来说,同一品牌的CPU,如果频率越高,速度自然就快. CPU相当于一个人的大脑,如果某台的计算机的CPU出问题了,就相当于某个人的智力有问题了,这样,速度是快不起来的. 2、内存大小与计算机运行速度 内存的作用是暂时存储一些需要查看或操作的文件和应用程序,供用户进行处理。内存中的资料会因断电而丢失。 内存在计算机中的作用很大,电脑中所有运行的程序都需要经过内存来执行,如果执行的程序很大或很多,就会导致内存消耗殆尽。 内存就好比你大脑的短暂记忆功能,它把收到的指令暂时存起来,然后才去执行,如果对电脑下达的 命令太多或者太大,记忆空间不够,电脑无法完成,就会造成死机,或者任务执行失败。 举个例子,有人叫你去帮他买个东西,这么小的一件事你的记忆空间可以容纳,你就可以做到,但是那个人叫你去买好多东西,你脑子的记忆空间就不够了,你也就无法完成他交给你的任务,内存起的就是暂时的记忆功能,内存的大小决定他的记忆空间的大小!内存越大机器越不容易死机!内存越好,他的执行速度越快! 所以,内存越大,对提高计算机运行速度,是有帮助的. 3、显卡的显存和位宽 显存位宽是显存在一个时钟周期内所能传送数据的位数,位数越大则瞬间所能传输的数据量越大,这是显存的重要参数之一。 显存位宽=显存频率X显存位宽/8,那么在显存频率相当的情况下,显存位宽将决定显存带宽的大小。比如说同样显存频率为500MHz的128位和256位显存,那么它俩的显存带宽将分别为:128位=500MHz*128∕8=8GB/s,而256位=500MHz*256∕8=16GB/s,是128位的2倍,可见显存位宽在显存数据中的重要性。 显卡的显存是由一块块的显存芯片构成的,显存总位宽同样也是由显存颗粒的位宽组成。 显卡显存=显存颗粒位宽×显存颗粒数。显存颗粒上都带有相关厂家的内存编号,可以去网上查找其编号,就能了解其位宽,再乘以显存颗粒数,就能得到显卡的位宽。这是最为准确的方法,但施行起来较为麻烦. 4、硬盘的读写速度 硬盘的传输速率:作为电脑中最重要的数据存储设备和数据交换媒介,硬盘传输速率的快慢直接影响了系统的运行速度。 硬盘真正的传输速度由于受硬盘内部传输速率的影响,其稳定传输速率一般在30MB/s到45MB/s 之间。这样随着CPU、内存等硬件运行速度的不断提高,ATA硬盘的低速率渐渐成为影响整机运行速度的瓶颈。于是,一种新的硬盘接口方式,Serial ATA应运而生。 树莓派连接笔记本及安装编译OpenCV 一.树莓派远程连接电脑 一.材料:树莓派一部、网线一根,笔记本电脑一台。 1.树莓派:带供电系统和烧好Raspbian系统的SD卡; 2.网线:交叉或直连; 3、笔记本电脑 二、操作步骤。 1.连线。 树莓派接好供电线; 将网线一端接到树莓派,另一端接到笔记本。 2.共享互联网。 如果现在笔记本已经通过WIFI连接到互联网,可以将无线网卡的互联网资源共享给本地连接。以win7系统为例,开始——控制面板——网络和Internet ——网络和共享中心——查看网络状态和任务——更改适配器设置,找到无线网络连接右键“属性”,在共享选项卡上选中“允许其他网络用户通过此计算机的Internet连接来连接(N)”选项,点确定。 3.查找树莓派的IP地址。 运行DOS窗口,输入arp -a,如下图,在接口192.168.137.1下的为动态类型的IP地址就是树莓派的地址(如果IP地址太多,可以先让树莓派与电脑断开,查询IP地址,然后再接上树莓派,查询IP,比较两次IP地址不同处,找到动态IP。) 4.利用PuTTY软件连接树莓派。 此时输入上述查找的动态IP地址或设置好的静态IP地址就能连接上树莓派了,因为是初次连接要进行一下初始化设置和其他操作。 打开PuTTY,输入树莓派的IP地址即可登录。 首次登录会和您确认连接密钥,请按“是”确认。只有首次登录会出现这个提示。 登录后会提示输入用户名和密码,输入之后即可登录树莓派的命令行。 (提示:Raspbian默认的用户名密码是pi/raspberry(密码输入时不显示出来)) 设置电脑允许远程协助连接此计算机,如下图所示: 从入门到精通零基础玩转佳能600D 零基础玩转佳能600D 单反相机凭借其专业化的外观以及优质的画质,正逐渐受到家庭用户的青睐。相比于十几年前,如今购买一台单反相机的门槛已经低了很多,4500元的价格就能将单反抱回家。然而很多初学者在面对专业度很高的单反相机时多少都显得有些手足无措,并不能熟练的使用。今天笔者就给大家详细的讲解下单反相机的使用方法,希望大家看完文章后,能更加游刃有余的使用手中的相机。 要说单反相机最大的特色,那一定非高画质莫属。就拿笔者手中的这台佳能600D为例,该机配备了一块APS-C规格的CMOS图像感应器,有效像素高达约1800万。就感光元件的面积而言,是普通卡片相机的5.8倍,其拍摄效果也就不言而喻了。并且该机还搭载了高性能DIGIC 4数字影像处理器,可对庞大的数据量进行高速的处理。 图为:佳能600D 图为:佳能600D微透镜结构 佳能600D的图像感应器采用了无间隙微透镜,相邻微透镜间实现了无间隙状态,而且微透镜到光电二极管的距离也得到了缩短,实现了更高的聚光率。聚光率的提升使信噪比也进一步提高。接下来我们就来看看这台相机的基本外观吧。 了解更新佳能600D信息尽在佳能官方网站 2佳能600D外观各部分名称 ·佳能600D外观各部分名称 单反相机不同于以往的卡片相机,600D身上遍布了大量专业化的按钮,初学者在面对这么多按键时总是感到很迷茫。那么,我们首先就来认识一下这些按钮,看看他们都是干什么用的,正所谓知己知彼,才能百战百胜。 图为:佳能600D正面 图为:佳能600D背面 图为:佳能600D顶部 图为:佳能600D侧面 图为:佳能600D侧面 佳能600D机身按键虽然繁多,但每个按键上都有相应标识,并不难记。相信大家在使用过几次后就能完全掌握了。 产品:5D Mark III(单机)佳能数码相机 安装配置树莓派的最佳工具——NOOBS 如果你想找一种最简单的方式启动你的树莓派,不用再左顾右盼啦!树莓派基金会开发的New Out Of Box Software (NOOBS)(以下简称NOOBS)让这个强有力的小平台比任何时候都更容易配置和启动。 为什么我们要做NOOBS? 为一个树莓派安装操作系统当然算不上这个世界上最困难的事情,但是这需要一系列的工具并且需要知道如何使用这些工具。NOOBS系统不仅可以非常方便的让一张空白的SD卡摇身变为安装了Rasbian系统的启动盘,而且还可以预包装其他可选的树莓派操作系统,比如Pidora(基于Fedora的系统)、RISC OS 、Arch(Arch Linux 的树莓派版),甚至像RaspBMC和OpenELEC这样的XMBC系统也不在话下。 换句话说,你可以很容易的安装并测试运行任何流行的树莓派操作系统而不必同那些琐碎的安装步骤和系统镜像较劲。不使用NOOBS的唯一理由是你想要创建一个多操作系统的启动盘,这样在启动时你可以在多个操作系统之间进行切换。 以前,你得需要像BerryBoot这样的boot管理器来实现多操作系统启动功能。随着NOOBS v1.3的发布,多系统启动功能也包含在内了,功能甚至比BerryBoot还要强大,因为NOOBS的解决方案里各操作系统的内核是独立的,而不像BerryBoot那样是共享型的。结果就是,你安装的所有的操作系统都是高度独立的。如果你对某系统的配置做出修改,比如说超频或者修改RaspBMC中的内存配置,那么你仍然可以让Rasbian系统保持默认的配置(反之亦然)。 准备好NOOBS Howay2000系列无线接入点 快速入门指南 版权所有?2011~2013苏州汉明科技有限公司 本手册包括但不限于其所包含的所有信息均受著作权法的保护,未经苏州汉明科技有限公司的许可,不得将本手册的任何部分影印、复制或翻译成其它语言。本手册没有任何明确或隐含的保证,包括为了特殊目的进行销售或安装的保证。若有任何因本手册所引起的直接或间接的资料流失、利益损失或业务终止,苏州汉明科技有限公司恕不为其担负任何责任。苏州汉明科技有限公司有对本手册进行更改或修订的权利,其内容会随时更新,恕不另行通知。苏州汉明科技有限公司不对本手册的技术性错误、编印错误或疏漏负任何责任。 1.前言 快速入门指南帮助您快速连接和配置AP设备。 1.1准备工作 在开始安装使用设备之前,至少需要具备以下条件: 1)一台安装了10/100Base-TX自适应快速以太网卡的计算机。 2)以太网卡的IP地址与设备在相同的网段(设备默认的IP地址为192.168.1.1),您 可以配置以太网卡的IP地址为192.168.1.2。 3)建议使用Microsoft IE 8.0、firefox、Google Chrome浏览器。 4)两根用于连接设备与计算机的网线。 1.2缺省配置 Howay2000系列产品主要的默认配置如表格1–1所示: 表格1–1 Howay2000系列产品默认配置 选项缺省值 用户名admin (区分大小写) 密码admin (区分大小写) WAN口类型Bridged WAN口IP地址192.168.1.1 WAN口子网掩码255.255.255.0 1.3硬件连接与配置 1)将AP的电源适配器插入标准电源插座,或通过标准的POE设备提供电源,然后使用网线连接电脑和设备有线网口。 2)设置计算机的IP地址,使IP地址与AP在同一网段,以便对设备进行管理。设备默认IP地址是192.168.1.1,默认子网掩码是255.255.255.0,因此可以设置计算机的IP地址 树莓派的入门配置 Company Document number:WTUT-WT88Y-W8BBGB-BWYTT-19998 树莓派新版-入门配置 来源:网络编辑:admin 如果你有密集恐惧症则只需要看标题和字体加粗部分.有下划线的是网站都可以点开的. Linux系统分支有很多国内常用的分支主要是: 参考:GNU/Linux发行版历年分支进化图一览. 目前桌面版Debian分支相比要做的好点,服务器端肯定是Redhat分支了,因为树莓派硬件是基于ARM的,所以在树莓派官网也有针对其的编译版. RASPBIAN 对应debian PIDORA 对应 Redhat下的Fedora分支 好了废话不多说,正文开始. 1.系统安装写入SD卡 a)在官网下载RASPBIAN的镜像,点击前面的链接下载,最新版本有900多M,下载后解压文件. b)这里推荐使用Win32DiskImager这款软件来将树莓派系统写入到SD卡 c)然后将SD卡插入树莓派,并且连接上网线和电源. 2.使用 raspi-config工具配置树莓派 a)查看ip 正常情况下树莓派就可以启动了,但是现在还不知道他的IP,无法用ssh的方式进入系统,如果会用路由器查看ip的朋友就不是事,如果不会的可以使用Advanced IP scanner这款软件查看. b)系统配置 知道IP了就可以进入系统配置了 树莓派的默认账号是pi,默认密码是raspberry. SSH进入后输入 sudo raspi-config 这个命令会弹出这个命令行配置界面 1 Expand Filesystem 扩展文件系统按回车即可.(将SD卡利用率最大化). 2 Change User Password 改变默认pi用户的密码. 3 Enable Boot to Desktop/Scratch 启动时进入的环境选择 Console Text console, requiring login(default) 启动时进入字符控制台,需要进行登录(默认项) Desktop log in as user "pi" at the graphical desktop 启动时进入LXDE图形界面的桌面 Scratch Start the Scratch programming environment upon boot 启动时进入Scratch编程环境,进入后,可以点File->Exit退出,然后在退出过程中按Ctrl+C进入控制台。 4 Internationalisation Options 国际化选项,可以更改默认语言 I1 Change Locale 语言和区域设置,默认英文就好,如果修改中文怕出现一些乱码问题 I2 Change Timezone 设置时区,如果设置不进行设置,PI的时间就显示不正常。选择Asia(亚洲)再选择Chongqing(重庆)即可。 加电 没有插SD卡,加电时除了电源灯之外,不会有任何的反应,HDMI没有任何输出,树莓派的说明书中提到可以通过串口输入命令,但是它的串口是通过那两排GPIO的脚的其中三个脚印引出的,而且是TTL电平的,必须通过驱动芯片才能和PC机的串口连接。 准备SD卡 树莓派的官网提供了三个版本的镜像文件,还有无数第三方的镜像,由于是初次接触,还是用官网的Raspbian版本,因为是基于Debian的,所以Debian的一些命令和配置方法可以用得上。还要下载Win32DiskImager工具,用于在Windows下将下载的IMG文件写入到SD卡中。至于为什么把镜像文件直接拷贝到SD卡中是无效的,一言难尽,就和刻录光碟的ISO镜像要用专门刻录镜像的功能,而不能直接把ISO文件刻录到光碟上的道理是一样的。 在这里下载文件,然后把读卡器和SD卡插入计算机,运行Win32DiskImager,选择镜像文件和合适的盘符,如果原来机器上插有其他的USB硬盘或者SD卡,建议在做这件事之前全部拔掉,避免发生选错盘符,把整个USB硬盘资料全部 洗掉的情况。 写入完成后,就可以把SD卡插到树莓派上,把HDMI线、鼠标、键盘、网线全部插上。 首次启动 加电后,如果电源灯旁边的绿色的灯(OK)会闪动,就说明SD卡是可用的。这时如果HDMI连接好电视了,电视上就会开始出现启动画面了。 接着是熟悉的Linux启动界面,企鹅被替换成了树莓: 首次启动将出现系统初始配置的界面,这个界面在也可以在之后的终端窗口中通过sudo raspi-config激活。 由于在初始配置的界面上没有看到有网络配置的选项,所以建议在网络环境中一定要有DHCP,也就是能自动获取IP的网络环境。因为Raspbian的各种软件的安装是需要网络连接支持的。需要用到的功能说明如下: ?expand_rootfs–将根分区扩展到整张SD卡,因为整个Image才400多兆,但是现在的SD卡基本都是几个G的,除非SD卡有其他用途,一般建议选择这项,这样可以有足够多的空间来安装各种程序。 ?overscan–可以扩充或者缩小屏幕的设置,除非一启动就发现显示的内容能刚好填满整个电视的画面。大部分情况下是不能填满或者超过,如果这样就要enable这个,然后在系统启动之后,更改config.txt中的overscan_left、overscan_right、overscan_top和overscan_bottom的内容,如果显示内容超出屏幕的范围(显示不全),就要设置这些值为正值,如果是1080p,一般设置为48。如果显示的内容不能填满屏幕,则设置这些值为负值,如果是1080p,一般设置为-48。具体可以更加显示的结果,以16为步长进行调整。?configure_keyboard - 这个很重要,前面的屏幕选默认值:Generic 105-key (Intl) PC,但在Keyboard layout:时,显示出来的都是English(UK)的,要选择Other,然后在里面选择English(US),否则会出现键盘的一些符号不对或者对调,比如引号”和@符号对调,#号变成英镑符号等等。之后的两个屏幕都选择默认值就可以了,到了:Use Control+Alt+Backspace to 光闸快速入门操作手册 1.操作权限描述 2.登录发送端系统 使用系统管理员(默认为admin)登录光闸发送端 输入网址,通过【系统管理】→【服务管理】,检查传输服务、FTP服务、SMB服务是否开启,将未开启服务开启。 3.业务配置 使用业务操作员(默认为operation),通过【安全管理】→【业务管理】对SMB共享进行配置。具体操作步骤如下: (1)点击【目录管理】创建目录,名称为:bjtest(参考) (2)点击【业务管理】创建业务,名称为:bjtest,并选择共享目录bjtest(参考) (3)点击【生效】。 【保存】:在以上信息添加无误后,点击【保存】按钮,提交添加的共享路径信息,如果路径已存在,则会提示如下信息,添加成功则会提示操作成功,并跳转到共享路径信息列表页面。 【关闭】:关闭当前窗口,并取消当前操作。 共享路径:下拉列表中为共享路径信息列表。 群组:下拉列表中为群组信息列表。 【保存】:在以上信息添加无误后,点击【保存】按钮,提交添加的用户信息,如果用户已存在,则会提示如下信息,添加成功则会提示操作成功,并跳转到业务信息列表页面。 4.发送配置文件 使用业务操作员(默认为operation),通过【高级功能】→【配置导入导出】,选择共享配置和用户配置,点击【发送配置】。如下图: 5.登录接收端系统 使用系统管理员(默认为admin)登录光闸接收端 输入网址,通过【系统管理】→【服务管理】,检查接收服务、FTP服务、SMB服务是否开启,将未开启服务开启。 6.查看传输状态 图中?:传输通道监测信息:绿色代表通道正常,红色代表通道异常。 7.接收配置文件 使用业务操作员(默认为operation),通过【高级功能】→【配置导入导出】→点击【接收配置】。如下图: 8.测试文件传输 发送端:使用共享业务bjtest通过FTP或者smb登录到发送端,打开所共享目录(bjtest),拷贝任意文件。 接收端:使用共享业务 一、树莓派raspi-config设置 第一次使用树莓派的时候需要进行一些简单的配置,在终端运行如下命令进入配置界面 1 sudo raspi-config 1 Expand Filesystem 扩展文件系统,扩展整张SD卡空间作为根 分区。 1 2 Change User Password 改变默认pi用户的密码,按回车后输入pi用户的新密码。 3 Enable Boot to Desktop/Scratch 启动时进入的环境选择 1 Console Text console, requiring login(default) 启动时进入字符控制台,需要进行登录(默认项)。 2 Desktop log in as user 'pi' at the graphical desktop 启动时进入LXDE图形界面的桌面。 2 3 Scratch Start the Scratch programming environment upon boot 启动时进入Scratch编程环境。 4 Internationalisation Options 国际化选项,可以更改默认语言 I1 Change Locale 语言和区域设置。选中zh-cn然后回车 I2 Change Timezone 设置时区,如果不进行设置,Pi的时间就显示不正常。 I3 Change Keyboard Layout 3 改变键盘布局,国内多使用PC104标准键盘,一般设置如下: ->Generic 104-key PC ->English(US) ->The default for the keyboard layout ->No compose key ->ctrl_alt_backspace Yes 5 Enable Camera 启动PI的摄像头模块,如果想启用,选择Enable,禁用选择Disable就行了 6 Add to Rastrack 把你的PI的地理位置添加到一个全世界开启此选项的地图。 4 win10如何看电脑配置 一台电脑性能好坏,最主要的是由CPU、显卡决定,其它方面的还有内存和硬盘相关。而现在游戏对电脑配置的要求不断提高,安装最新的Win10系统也对电脑配置有要求。那么怎么看自己电脑的配置呢?下面是小编为你整理相关的内容以及win10要怎么配置,希望大家喜欢! Win7和win10查看电脑配置方法教程 一、通过软件查看电脑配置 查看电脑配置的方法可以通过硬件检测软件或直接在系统中查看,使用软件优点是操作方便简单,一些专业软件能检测查看更多电脑配置信息。下面以电脑管家为例,首先在电脑中下载安装“电脑管家”工具,之后打开运行,然后在工具箱中找到“硬件检测”,点击后会下载工具,下载完成会即可点击运行。 进入硬件检测,会自动检测出各个电脑配置信息,一览无余,包括处理器、显卡、内存、硬盘、声卡、网卡、显示器、操作系统等完整的配置信息。 电脑管家查看电脑配置方法 支持查看电脑配置的软件还是很多,比如鲁大师、360安全卫士、驱动精灵等等,都可以查看电脑配置信息。 二、通过系统查看电脑配置 软件查看电脑配置虽然方便,但在系统中查看电脑配置的方法是我们必须要了解的,有所是在没有网络,或者电脑没有安装软件的环境下,通过系统查看电脑配置才是最靠谱的,无需借助任何工具也能快速查看电脑信息,下面以Win7和Win10系统为例,教大家如何看电脑配置。 1.选中桌面上的“计算机(此电脑)”→鼠标右键→属性,查看电脑的CPU和内存。 2.查看完毕后,点击左边的“设备管理器”; 3.选择设备管理器界面中的“处理器”和“显示适配器”可以查看详细的CPU信息和显卡信息;树莓派简介
树莓派装机及系统优化
Vijeo Citect 7.30 快速入门教程 2 高级配置
从入门到精通tellmewhen篇
自己组装电脑配置清单四款
树莓派系统安装
从入门到精通 KMPLAYER技巧集锦
树莓派使用说明
ADAM-4117快速入门手册_ED2
决定电脑运行速度快慢的硬件因素计算机基础知识1、一台计算机运行
树莓派配置
从入门到精通 零基础玩转佳能600D
安装配置树莓派的最佳工具
Howay2000快速入门指南
树莓派的入门配置
比较全的树莓派入门介绍
光闸快速入门操作手册
中职扩展资源包资料:树莓派系列教程4:树莓派raspi-config配置
win10如何看电脑配置
相关主题
文本预览