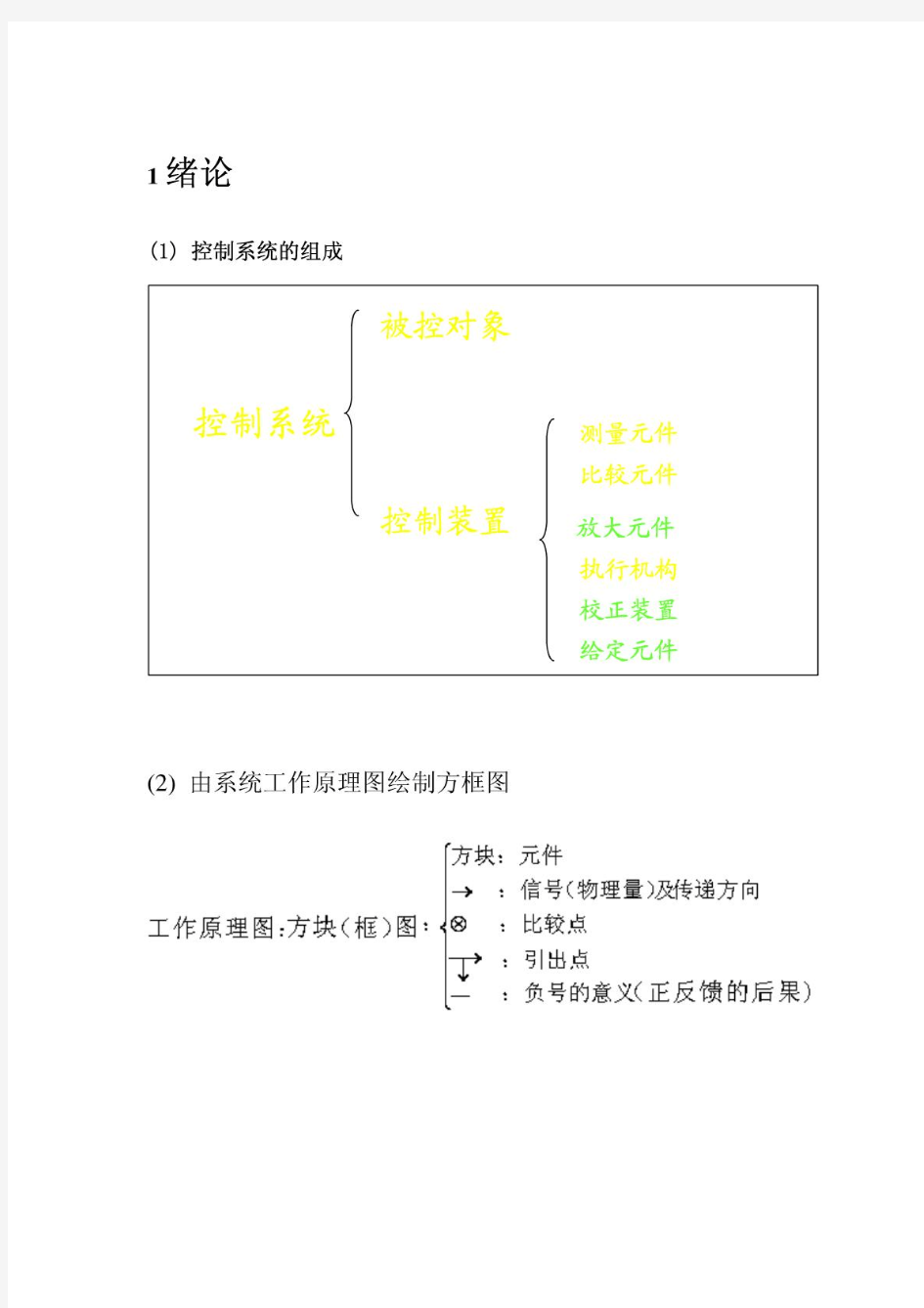
一、求下图所示系统的传递函数)(/)(0s U s U i 。 (10分) ) 1()()(3132320+++-=CS R R R R CS R R s U s U i 一、控制系统方块图如图所示: (1)当a =0时,求系统的阻尼比ξ,无阻尼自振频率n ω和单位斜坡函数输入时的稳态误差; (2)当ξ=时,试确定系统中的a 值和单位斜坡函数输入时系统的稳态误差; 系统的开环传函为 s a s s G )82(8)(2++=闭环传函为8)82(8)()(2+++=s a s s R s Y 25.0 83.2 36.0===ss n e ωξ 4 25.0==ss e a 设某控制系统的开环传递函数为 ) 22()(2++=s s s k s G 试绘制参量k 由0变至∞时的根轨迹图,并求开环增益临界值。 (15分) 1)j p j p p --=+-==110 321 2)πππ?σ3 5,,332=-=a a (10分) 3)ω=j 2±,c k =4,开环增益临界值为K=2 设某系统的特征方程为23)(234+--+=s s s s s D ,试求该系统的特征根。 列劳斯表如下 0000220112311 2 3 4 s s s s --- (4分) 得 辅助方程为0222=+-s ,解得1,121-==s s (4分)
最后得1,243=-=s s 设某控制系统的开环传递函数为 )()(s H s G =) 10016()12.0(752+++s s s s 试绘制该系统的Bode 图,并确定剪切频率c ω的值 剪切频率为s rad c /75.0=ω 某系统的结构图和Nyquist 图如图(a)和(b)所示,图中 2)1(1)(+=s s s G 23 ) 1()(+=s s s H 试判断闭环系统稳定性,并决定闭环特征方程正实部根的个数。 (16分) 解:由系统方框图求得内环传递函数为: s s s s s s s H s G s G +++++=+23452 474)1()()(1)( (3分) 内环的特征方程:04742345=++++s s s s s (1 分) 由Routh 稳定判据: 01: 03 10 :16 :044: 171: 01234s s s s s 七、设某二阶非线性系统方框图如图所示,其中 4 , 2.0 , 2.00===K M e 及s T 1=, 试画出输入信号)(12)(t t r ?=时系统相轨迹的大致图形,设系统原处于静止状态。 (16分) 解:根据饱和非线性特性,相平面可分成三个区域,运动方程分别为
阶变系统的开环传递函数 clear all; Ap=1.68e-2; In=0.03; ps=4e6; pL=2*ps/3; Ki=188.6; Vt=2.873e-3; Kf=1; bate=6900e5; m=35000; Wh=sqrt(4*bate*Ap^2/(m*Vt)) zuni1=0.3; sys1=tf(1/Ap,[1/Wh^2 2*zuni1/Wh 1 0]) Wsv=157; zuni2=0.7; Ksv=1.96e-3; sys2=tf(Ksv,[1/Wsv^2 2*zuni1/Wsv 1]) %系统的开环传递函数
sys_open=Ki*sys1*sys2 sysclose=feedback(sys_open,1); figure; %绘制nyquist曲线 subplot(121);pzmap(sys_open); grid on; xlabel('实轴');ylabel('虚轴');title('零极点图'); subplot(122); nyquist(sys_open); grid on; xlabel('实轴');ylabel('虚轴');title('Nyquist图'); figure; %时域分析 subplot(121);step(sysclose); grid on; xlabel('时间');ylabel('振幅');title('阶跃响应'); subplot(122);impulse(sysclose); grid on; xlabel('时间');ylabel('振幅');title('脉冲图响应'); figure; %绘制Bode图及其参数求解 w=logspace(-1,2); grid on; margin(sys_open); xlabel('频率');title('Bode图');
一、求下图所示系统的传递函数 ) (/)(0s U s U i 。 (10分) ) 1()()(313 2320+++-=CS R R R R CS R R s U s U i 一、控制系统方块图如图所示: (1)当a =0时,求系统的阻尼比ξ,无阻尼自振频率n ω和单位斜坡函数输入时的稳态误差; (2)当ξ=0.7时,试确定系统中的a 值和单位斜坡函数输入时系统的稳态误差; 系统的开环传函为 s a s s G )82(8)(2++= 闭环传函为8)82(8 )()(2 +++=s a s s R s Y 25.0 83.2 36.0===ss n e ωξ 4 25.0==ss e a 设某控制系统的开环传递函数为 ) 22()(2 ++= s s s k s G 试绘制参量k 由0变至∞时的根轨迹图,并求开环增益临界值。 (15分) 1)j p j p p --=+-==110321 2) πππ?σ3 5 ,,332=- =a a (10分) 3)ω=j 2±,c k =4,开环增益临界值为K=2 设某系统的特征方程为23)(2 3 4 +--+=s s s s s D ,试求该系统的特征根。 列劳斯表如下 022******* 2 34 s s s s ---
得辅 助 方 程 为 222=+-s ,解得 1,121-==s s (4分) 最后得1, 243=-=s s 设某控制系统的开环传递函数为 )()(s H s G = ) 10016() 12.0(752+++s s s s 试绘制该系统的Bode 图,并确定剪切频率c ω的值 剪切频率为s rad c /75.0=ω 某系统的结构图和Nyquist 图如图(a)和(b)所示,图中 2)1(1)(+=s s s G 2 3 ) 1()(+=s s s H 试判断闭环系统稳定性,并决定闭环特征方程正实部根的个数。 (16分) 解:由系统方框图求得内环传递函数为: s s s s s s s H s G s G +++++= +23452 474)1()()(1)(
负反馈控制系统的开环传递函数为 (1)、)3)(1()()(++=s s s K s H s G (2)、)3)(1() 2()()(+++=s s s s K s H s G 做系统根轨迹图。 解(1):传递函数已为标准零极点令 0)3)(1(=++s s s 可得开环极点为 00=p 11-=p 32-=p 则3=n ,0=m ,有3=-m n 条根轨迹终止于无穷远处 极点将实轴分为四个区间,仅有区间)3,(--∞和)0,1(-有根轨迹因为)0,1(-两端均为极点,则存在分离点为: 0]) ()(1[=ds s H s G d 03832=++s s 解出 45.01-=s 22.22-=s 根据实轴上根轨迹确定方法可知2s 不在根轨迹上,1s 为该系统的分离点。 与实轴的交点为3 4 3310321-=--=-++= m n p p p a σ 与实轴正方向的夹角为: 0=h , 6031801801==-= m n ? 1=h , 180180)12(2=-+= m n ? 2=h , 300180)122(3=-+?= m n ? 根轨迹与虚轴的焦点w 和对应的临界增益c k 值,由开环传递函数可 知,系统的闭环特征方程为 034)3)(1(23=+++=+++k s s s k s s s 令jw s =,上式变为 0)(3)(4)(23=+++k jw jw jw
实部与虚部分别为零,即 042=+-k w 033=+-w w 解得 3±=w 12=k 根据以上结果。绘制出大概的根轨迹图形如下 Mutlab 绘根轨迹图 G=tf(1,[conv([1,1],[1,3]),0]); rlocus (G); grid
阶变系统的开环传递函数阶变系统的开环传递函数 clear all; Ap=1.68e-2; In=0.03; ps=4e6; pL=2*ps/3; Ki=188.6; Vt=2.873e-3; Kf=1; bate=6900e5; m=35000; Wh=sqrt(4*bate*Ap /(m*Vt))
zuni1=0.3; sys1=tf(1/Ap,[1/Wh 2*zuni1/Wh 1 0]) Wsv=157; zuni2=0.7; Ksv=1.96e-3; sys2=tf(Ksv,[1/Wsv 2*zuni1/Wsv 1]) %系统的开环传递函数 sys_open=Ki*sys1*sys2 sysclose=feedback(sys_open,1); figure; %绘制nyquist曲线 subplot(121);pzmap(sys_open);
grid on; xlabel(‘实轴’);ylabel(‘虚轴’);title(‘零极点图’); subplot(122); nyquist(sys_open); grid on; xlabel(‘实轴’);ylabel(‘虚轴’);title(‘Nyquist图’); figure; %时域分析 subplot(121);step(sysclose); grid on; xlabel(‘时间’);ylabel(‘振幅’);title(‘阶跃响应’); subplot(122);impulse(sysclose); grid on; xlabel(‘时间’);ylabel(‘振幅’);title(‘脉冲图响应’); figure; %绘制Bode 图及其参数求解 w=logspace(-1,2); grid on;
五、(共15分)已知某单位反馈系统的开环传递函数为 (1)()()(3) r K s GS HS s s += -,试: 1、绘制该系统以根轨迹增益K r 为变量的根轨迹(求出:分离点、与虚轴的交点等);(8分) 2、求系统稳定且为欠阻尼状态时开环增益K 的取值范围。(7分) 五、(共15分) (1)系统有有2个开环极点(起点):0、3,1个开环零点(终点)为:-1; (2分) (2)实轴上的轨迹:(-∞,-1)及(0,3); (2分) (3)求分离点坐标 111 13 d d d =+ +-,得 121, 3d d ==- ; (2分) 分别对应的根轨迹增益为 1, 9r r K K == (4)求与虚轴的交点 系统的闭环特征方程为(3)(1)0r s s K s ++=-,即2 (3)0r r s K s K +-+= 令 2(3)0r r s j s K s K ω =+-+=,得 3, 3r K ω=±= (2分) 根轨迹如图1所示。 图1 2、求系统稳定且为欠阻尼状态时开环增益K 的取值范围 系统稳定时根轨迹增益K r 的取值范围: 3r K ≥, (2分) 系统稳定且为欠阻尼状态时根轨迹增益K r 的取值范围: 3~9r K =, (3分) 开环增益K 与根轨迹增益K r 的关系: 3 r K K = (1
分) 系统稳定且为欠阻尼状态时开环增益K 的取值范围: 1~3K = (1分) 六、(共22分)已知反馈系统的开环传递函数为()()(1) K G s H s s s =+ ,试: 1、用奈奎斯特判据判断系统的稳定性;(10分) 2、若给定输入r(t) = 2t +2时,要求系统的稳态误差为0.25,问开环增益K 应取何值。 (7分) 3、求系统满足上面要求的相角裕度γ。(5分) 六、(共22分) 解:1、系统的开环频率特性为 ()()(1) K G j H j j j ωωωω= + (2分) 幅频特性:2 ()1K A ωωω = +, 相频特性:()90arctan ?ωω=--(2分) 起点: 00, (0),(0)90A ω?+++ ==∞=-;(1分) 终点: ,()0,()A ω?→∞∞=∞=-;(1分) 0~:()90~180 ω?ω=∞=--, 曲线位于第3象限与实轴无交点。(1分) 开环频率幅相特性图如图2所示。 判断稳定性: 开环传函无右半平面的极点,则0P =, 极坐标图不包围(-1,j0)点,则0N = 根据奈氏判据,Z =P -2N =0 系统稳定。(3分) 2、若给定输入r(t) = 2t +2时,要求系统的稳态误差为0.25,求开环增益K : 系统为1型,位置误差系数K P =∞,速度误差系数K V =K , (2分) 图2
实验一 MATLAB 系统的传递函数和状态空间表达式的转换 一、 实验目的 1、学习多变量系统状态空间表达式的建立方法; 2、通过编程、上机调试,掌握多变量系统状态空间表达式与传递函数之间相互转换的方法; 3、掌握相应的MATLAB 函数。 二、 实验原理 设系统的模型如式(1.1)所示: ?? ?+=+=D Cx y Bu Ax x ' x ''R ∈ u ∈R ’’’ y ∈R P (1.1) 其中A 为nXn 维系统矩阵、B 为nXm 维输入矩阵、C 为pXn 维输出矩阵,D 为直接传递函数。系统的传递函数和状态空间表达式之间的关系如式(1.2)所示 G(s)=num(s)/den(s)=C (SI-A)-1 B+D (1.2) 式(1.2)中,num(s)表示传递函数的分子阵,其维数是pXm ,den(s)表示传递函数的按s 降幂排列的分母。 表示状态空间模型和传递函数的MATLAB 函数如下: 函数ss (state space 的首字母)给出了状态空间模型,其一般形式是: sys=ss(A,B,C,D) 函数tf (transfer function 的首字母)给出了传递函数,其一般形式是: G=tf(num ,den) 其中num 表示传递函数中分子多项式的系数向量(单输入单输出系统),den 表示传递函数中分母多项式的系数向量。 函数tf2ss 给出了传递函数的一个状态空间实现,其一般形式是: [A,B,C,D]=tf2ss(num,den) 函数ss2tf 给出了状态空间模型所描述系统的传递函数,其一般形式是: [num,den]=ss2tf(A,B,C,D,iu)
一、单项选择题 1.设某系统开环传递函数为G(s)=) 1s )(10s s (102+++,则其频率特性奈氏图起点坐标为( C ) A .(-10,j0) B .(-1,j0) C .(1,j0) D .(10,j0) 2.在串联校正中,校正装置通常( B ) A .串联在前向通道的高能量段 B .串联在前向通道的低能量段 C .串联在反馈通道的高能量段 D .串联在反馈通道的低能量段 3.已知单位反馈控制系统在阶跃函数作用下,稳态误差e ss 为常数,则此系统为(A ) A .0型系统 B .I 型系统 C .Ⅱ型系统 D .Ⅲ型系统 4.设某环节的传递函数为G(s)=121 +s ,当ω=0.5rad /s 时, 其频率特性相位移θ(0.5)=( A ) A .-4π B .-6π C .6π D .4π 5.线性定常系统的传递函数,是在零初始条件下( D ) A .系统输出信号与输入信号之比 B .系统输入信号与输出信号之比 C .系统输入信号的拉氏变换与输出信号的拉氏变换之比 D .系统输出信号的拉氏变换与输入信号的拉氏变换之比 6.控制系统中,基本环节的划分,是根据( D ) A .元件或设备的形式 B .系统的物理结构 C .环节的连接方式 D .环节的数学模型 7.比例微分控制器中,微分时间常数越大,则系统的( A ) A .动态偏差越小 B .动态偏差越大 C .振荡越小 D .过渡过程缩短 8.同一系统,不同输入信号和输出信号之间传递函数的特征方程( A ) A .相同 B .不同 C .不存在 D .不定 9.2型系统对数幅频特性的低频段渐近线斜率为( B ) A .-60d B /dec B .-40dB /dec C .-20dB /dec D .0dB /dec 10.已知某单位负反馈系统的开环传递函数为G(s)=)1(1 +s s ,则相位裕量γ的值为( B ) A .30° B .45° C .60° D .90° 11.单位抛物线输入函数r(t)的数学表达式是( D ) A .at 2 B .21Rt 2 C .t 2 D .21 t 2
2-1 习 题 2-1 试求图示电路的微分方程和传递函数。 2-2 ur 为输入量,电动机的转速ω为输 出量,试绘制系统的方框图,并求系统的传递函数 ) () ( ,)( )(s M s s U s L r ΩΩ。(ML 为负载转矩,J 为电动机的转动惯量,f 为粘性摩擦系数,Ra 和La 分别为电枢回路的总电阻和总电感,Kf 为测速发动机的反馈系数)。 2-3 图示电路,二极管是一个非线性元件,其电流d i 和电压d u 之间的关系为)1(10026 .0/6-=-d u d e i ,假设系统 工作在u 0=2.39V ,i 0=2.19×10-3A 平衡点,试求在工作点 (u 0,i 0)附近d i =f (d u )的线性化方程。 2-4 试求图示网络的传递函数,并讨论负载效应问题。
2-2 2-5 求图示运算放大器构成的网络的传递函数。 2-6 已知系统方框图如图所示,试根据方框图简化规则,求闭环传递函数。 2-7 分别求图示系统的传递函数 )()(11s R s C 、)()(12s R s C 、)()(21s R s C 、) () (22s R s C 2-8 绘出图示系统的信号流图,并求传递函数)(/)()(s R s C s G
2-3 2-9 试绘出图示系统的信号流图,求系统输出C (s )。 2-10 求图示系统的传递函数C (s )/R (s )。 2-11 已知单位负反馈系统的开环传递函数 ] 4)4)[(1(2 34)(22 23++++++=s s s s s s s G 1. 试用MA TLAB 求取系统的闭环模型; 2. 试用MA TLAB 求取系统的开环模和闭环零极点。 2-12 如图所示系统 1. 试用MA TLAB 化简结构图,并计算系统的闭环传递函数;
第1页 一.填空题。(10分) 1.传递函数分母多项式的根,称为系统的 2. 微分环节的传递函数为 3.并联方框图的等效传递函数等于各并联传递函数之 4.单位冲击函数信号的拉氏变换式 5.系统开环传递函数中有一个积分环节则该系统为型系统。 6.比例环节的频率特性为。 7. 微分环节的相角为。 8.二阶系统的谐振峰值与有关。 9.高阶系统的超调量跟有关。 10.在零初始条件下输出量与输入量的拉氏变换之比,称该系统的传递函数。 二.试求下图的传第函数(7分) 三.设有一个由弹簧、物体和阻尼器组成的机械系统(如下图所示),设外作用力F(t)为输入量,位移为y(t)输出量,列写机械位移系统的微分方程(10分)
第2页 四.系统结构如图所示,其中K=8,T=0.25。(15分) (1)输入信号x i(t)=1(t),求系统的响应; (2)计算系统的性能指标t r、t p、t s(5%)、бp; (3)若要求将系统设计成二阶最佳ξ=0.707,应如何改变K值
第 3 页 )1001.0)(11.0()(++= s s s K s G 五.在系统的特征式为A (s )=6 s +25 s +84 s +123 s +202 s +16s+16=0,试判断系统的稳定性(8分) γ。(12分) 七.某控制系统的结构如图,其中 要求设计串联校正装置,使系统具有K ≥1000及υ≥45。 的性能指标。(13分)
s T s s s G 25.0,) 4(1 )(=+= . 八.设采样控制系统饿结构如图所示,其中 试判断系统的稳定性。 (10分) 九. 已知单位负反馈系统的开环传递函数为: 试绘制K 由0 ->+∞变化的闭环根轨迹图,系统稳定的K 值范围。(15分) ,)4()1()(22++=s s K s G
5-1 已知单位反馈系统的开环传递函数 习题 5-1已知单位反馈系统的开环传递函数,试绘制其开环极坐标图和开环对数频率特性。(1) )11.0(10) (s s s G (2) ) 12)(12.0(1 ) (s s s G (3) ) 12)(1(1 ) (s s s s G (4) ) 11.0)(1(10 ) (2 s s s s G 5-2设单位反馈系统的开环传递函数 ) 2(10) (s s G 试求下列输入信号作用下,系统的稳态输出。 1. ) 30sin()(t t r 2. ) 452cos(2sin ) (t t t r 5-3已知单位反馈系统的开环传递函数 ) 10)(1(10 ) (s s s s G 试绘制系统的极坐标图Bode 图,并求系统的相角裕量和幅值裕量。 5-4已知图示RLC 网络,当ω=10rad/s 时,系统的幅值A=1相角 =-90°,试求其传 递函数。 5-5已知最小相位系统的开环对数幅频特性的渐近线如图所示,试求系统的开环传递函 数,并计算系统的相角裕量。 习题5-4图
5-2 5-6设系统开环传递函数为 (1)) 02.01)(2.01 () ()(s s K s H s G (2)) 11.0)(1() ()(1.0s s s Ke s H s G s 试绘制系统的 Bode 图,并确定使开环截止频率 ωc =5rad/s 时的K 值。 5-7设系统开环频率特性极坐标图如图所示,试判断闭环系统的稳定性。(其中υ表示 积分环节个数,P 为开环右极点个数 )。 习题5-5图
5-3 5-8图示系统的极坐标图,开环增益K=500,且开环无右极点,,试确定使闭环系统稳 定的K 值范围。 5-9设系统的开环传递函数为 ) 1() ()(s s Ke s H s G s 1.试确定使系统稳定时 K 的临界值与纯时延 τ的关系; 2.若τ=0.2,试确定使系统稳定的K 的最大值。 5-10已知单位反馈系统的开环传递函数 ) 10)(1() (s s s K s G 求:1.当K=10 2.要求系统相角裕量为30,K 值应为多少? 3.要求增益裕量为 20dB ,求K 值应为多少? 习题5-11图 习题5-7图 习题5-8图
2-1 习 题 2-1 试求图示电路的微分方程和传递函数。 2-2 ur 为输入量,电动机的转速ω为输 出量,试绘制系统的方框图,并求系统的传递函数) () ( ,)( )(s M s s U s L r ΩΩ。(ML 为负载转矩,J 为电动机的转动惯量,f 为粘性摩擦系数,Ra 和La 分别为电枢回路的总电阻和总电感,Kf 为测速发动机的反馈系数)。 2-3 图示电路,二极管是一个非线性元件,其电流d i 和电压d u 之间的关系为)1(10026.0/6-=-d u d e i ,假设系统 工作在u 0=2.39V ,i 0=2.19×10-3A 平衡点,试求在工作点 (u 0,i 0)附近d i =f (d u )的线性化方程。 2-4 试求图示网络的传递函数,并讨论负载效应问题。
2-2 2-5 求图示运算放大器构成的网络的传递函数。 2-6 已知系统方框图如图所示,试根据方框图简化规则,求闭环传递函数。 2-7 分别求图示系统的传递函数)()(11s R s C 、)()(12s R s C 、)()(21s R s C 、)()(22s R s C 2-8 绘出图示系统的信号流图,并求传递函数)(/)()(s R s C s G
2-3 2-9 试绘出图示系统的信号流图,求系统输出C (s )。 2-10 求图示系统的传递函数C (s )/R (s )。 2-11 已知单位负反馈系统的开环传递函数 ] 4)4)[(1(234)(2223++++++=s s s s s s s G 1. 试用MA TLAB 求取系统的闭环模型; 2. 试用MA TLAB 求取系统的开环模和闭环零极点。 2-12 如图所示系统 1. 试用MA TLAB 化简结构图,并计算系统的闭环传递函数;
2-1 试求出图P2-1中各电路的传递函数。 图P2-1 2-2 试求出图P2-2中各有源网络的传递函数。 图P2-2 2-3 求图P2-3所示各机械运动系统的传递函数。 (1)求图(a )的 ()()?=s X s X r c (2)求图(b )的() () ?=s X s X r c (3)求图(c )的 ()()?12=s X s X (4)求图(d )的 ()() ?1=s F s X 图P2-3 2-4 图P2-4所示为一齿轮传动机构。设此机构无间隙、无变形,求折算到传动轴上的等效转动惯量、等效粘性摩擦系数和()()() s M s s W 2θ= 。
图P2-4 图P2-5 2-5 图P2-5所示为一磁场控制的直流电动机。设工作时电枢电流不变,控制电压加在励磁绕组上,输出为电机角位移,求传递函数()()() s u s s W r θ=。 2-6 图P2-6所示为一用作放大器的直流发电机,原电机以恒定转速运行。试确定传递函数 () () ()s W s U s U r c =,设不计发电机的电枢电感和电阻。 图P2-6 2-7 已知一系统由如下方程组组成,试绘制系统方框图,并求出闭环传递函数。 ()()()()()()[]()s X s W s W s W s W s X s X c r 87111--= ()()()()()[]s X s W s X s W s X 36122-= ()()()()[]()s W s W s X s X s X c 3523-= ()()()s X s W s X c 34= 2-8 试分别化简图P2-7和图P2-8所示的结构图,并求出相应的传递函数。
第二章 2-3试证明图2-5(a)的电网络与(b)的机械系统有相同的数学模型。 分析首先需要对两个不同的系统分别求解各自的微分表达式,然后两者进行对比,找出两者之间系数的对应关系。对于电网络,在求微分方程时,关键就是将元件利用复阻抗表示,然后利用电压、电阻和电流之间的关系推导系统的传递函数,然后变换成微分方程的形式,对于机械系统,关键就是系统的力学分析,然后利用牛顿定律列出系统的方程,最后联立求微分方程。 证明:(a)根据复阻抗概念可得: 即取A、B两点进行受力分析,可得: 整理可得: 经比较可以看出,电网络(a)和机械系统(b)两者参数的相似关系为 2-5 设初始条件均为零,试用拉氏变换法求解下列微分方程式,并概略绘制x(t)曲线,指出各方程式的模态。 (1) (2) 2-7 由运算放大器组成的控制系统模拟电路如图2-6所示,试求闭环传递函数Uc(s)/Ur(s)。 图2-6 控制系统模拟电路 解:由图可得 联立上式消去中间变量U1和U2,可得: 2-8 某位置随动系统原理方块图如图2-7所示。已知电位器最大工作角度,功率放大级放大系数为K3,要求: (1) 分别求出电位器传递系数K0、第一级和第二级放大器的比例系数K1和K2; (2) 画出系统结构图; (3) 简化结构图,求系统传递函数。 图2-7 位置随动系统原理图 分析:利用机械原理和放大器原理求解放大系数,然后求解电动机的传递函数,从而画出系统结构图,求出系统的传递函数。 解:(1) (2)假设电动机时间常数为Tm,忽略电枢电感的影响,可得直流电动机的传递函数为
式中Km为电动机的传递系数,单位为。 又设测速发电机的斜率为,则其传递函数为 由此可画出系统的结构图如下: -- (3)简化后可得系统的传递函数为 2-9 若某系统在阶跃输入r(t)=1(t)时,零初始条件下的输出响应,试求系统的传递函数和脉冲响应。 分析:利用拉普拉斯变换将输入和输出的时间域表示变成频域表示,进而求解出系统的传递函数,然后对传递函数进行反变换求出系统的脉冲响应函数。 解:(1),则系统的传递函数 (2)系统的脉冲响应 2-10 试简化图2-9中的系统结构图,并求传递函数C(s)/R(s )和C(s)/N(s)。 图2-9 题2-10系统结构图 分析:分别假定R(s)=0和N(s)=0,画出各自的结构图,然后对系统结构图进行等效变换,将其化成最简单的形式,从而求解系统的传递函数。 解:(a)令N(s)=0,简化结构图如图所示: 可求出: 令R(s)=0,简化结构图如图所示:
1.根轨迹起始于开环极点,终止于开环零点和无穷远处 2.系统开环传递函数有3个极点,2个零点,则有3条根轨迹 3.根轨迹是连续的且关于实轴对称 4.已知系统的开环传递函数为G(S)=K/S+3,则(-2,j0)点不在更轨迹上 5.已知(-2,j0)点在开环传递函数为G(S)=K/(S+4)(S+1)的系统的更轨迹上,则改点对应的k值为2 6.开环传递函数为G(S)=K/S+1,则实轴上的更轨迹为(-∞,-1] 7.已知系统的开环传递函数为G(S)=K/(S+0.5)(S+0.1),则该闭环系统的稳定状况为稳定 8.开环传递函数为G(S)=K/(S+1)(S+2)(S+3),当K增大时,该闭环系统由稳定到不稳定 9.系统开环传递函数为G(S)=K/(S+1)(S+3),则实轴上的根轨迹为[-3,-1] 10.设开环传递函数为为G(S)=K/S(S+2),在根轨迹的分离处,其对应的k值为 1 11.单位反馈系统开环传递函数为两个“S”多项式之比G(S)=M(s)/N(s),则闭环特征方程为 M(S)+N(S)=0 1.适合于应用传递函数描述的系统是线性定常系统 2.某0型单位反馈系统的开环增益K,则在r(t)=1t2/2输入下的稳态误差为∞ 3.动态系统0初始条件是指t . 一、填空题(每题1分,共15分) 1、对于自动控制系统的性能要求可以概括为三个方面,即: 、 和 ,其中最基本的要求是 。 2、若某单位负反馈控制系统的前向传递函数为()G s ,则该系统的开环传递函数 为 。 3、能表达控制系统各变量之间关系的数学表达式或表示方法,叫系统的数学模型,在古典控制理论中系统数学模型有 、 等。 4、判断一个闭环线性控制系统是否稳定,可采用 、 、 等方法。 5、自动控制系统有两种基本控制方式,当控制装置与受控对象之间只有顺向作用而无反向联系时,称为 ;当控制装置与受控对象之间不但有顺向作用而且还有反向联系时,称为 。 6、设系统的开环传递函数为12(1)(1) K s T s T s ++,则其开环幅频特性为 ,相频特性 为 。 7、最小相位系统是指 。 二、选择题(每题2分,共20分) 1、关于奈氏判据及其辅助函数 F(s)= 1 + G(s)H(s),错误的说法是 ( ) A 、 F(s)的零点就是开环传递函数的极点 B 、 F(s)的极点就是开环传递函数的极点 C 、 F(s)的零点数与极点数相同 D 、 F(s)的零点就是闭环传递函数的极点 2、已知负反馈系统的开环传递函数为221 ()6100 s G s s s +=++,则该系统的闭环特征方程为 ( )。 A 、2 61000s s ++= B 、 2 (6100)(21)0s s s ++++= C 、2 610010s s +++= D 、与是否为单位反馈系统有关 3、一阶系统的闭环极点越靠近S 平面原点,则 ( ) 。 A 、准确度越高 B 、准确度越低 C 、响应速度越快 D 、响应速度越慢 4、已知系统的开环传递函数为 100 (0.11)(5) s s ++,则该系统的开环增益为 ( )。 A 、 100 B 、1000 C 、20 D 、不能确定 5、若两个系统的根轨迹相同,则有相同的: A 、闭环零点和极点 B 、开环零点 C 、闭环极点 D 、阶跃响应 6、下列串联校正装置的传递函数中,能在1c ω=处提供最大相位超前角的是 ( )。 A 、 1011s s ++ B 、1010.11s s ++ C 、210.51s s ++ D 、0.11 101 s s ++ 7、下列哪种措施对提高系统的稳定性没有效果 ( )。 A 、增加开环极点; B 、在积分环节外加单位负反馈; C 、增加开环零点; D 、引入串联超前校正装置。 8、关于线性系统稳定性的判定,下列观点正确的是 ( )。 A 、线性系统稳定的充分必要条件是:系统闭环特征方程的各项系数都为正数; B 、无论是开环极点或是闭环极点处于右半S 平面,系统不稳定; C 、如果系统闭环系统特征方程某项系数为负数,系统不稳定; D 、当系统的相角裕度大于零,幅值裕度大于1时,系统不稳定。 9、关于系统频域校正,下列观点错误的是( ) A 、一个设计良好的系统,相角裕度应为45度左右; B 、开环频率特性,在中频段对数幅频特性斜率应为20/dB dec -; C 、低频段,系统的开环增益主要由系统动态性能要求决定; D 、利用超前网络进行串联校正,是利用超前网络的相角超前特性。 10、已知单位反馈系统的开环传递函数为22 10(21)()(6100) s G s s s s += ++,当输入信号是2 ()22r t t t =++时,系统的稳态误差是( ) A 、 0 B 、 ∞ C 、 10 D 、 20 三、(10分) 建立图示系统的数学模型,并以传递函数形式表示。 F i (t ) 习 题 6-1 试求图示有源网络的传递函数和Bode 图,并说明其网络特性。 6—2 已知单位反馈控制系统的开环传递函数为 ) 12.0(10)(+=s s s G 当串联校正装置的传递函数)(s G c 如下所示时: (1)1 05.012.0)(++=s s s G c (2))110()1(2)(++=s s s G c 1.试绘出两种校正时校正前和校正后系统Bode 图; 2.试比较两种校正方案的优缺点。 6—3 已知单位反馈系统的对数幅频特性曲线如图中)(0ωL ,串联校正装置)(s G c 的对数幅频特性如图中)(ωc L ,要求: 1.在图中画出系统校正后的对数幅频特性)(ωL ; 2.写出校正后系统的开环传递函数; 3.分析校正装置)(s G c 对系统的作用。 6—4系统的结构图如图所示,试利用根轨迹法设计超前校正装置,使系统满足下列性 能指标7.0=ζ,s t s 4.1=,12-=s K v 。 6—5 已知一单位反馈系统的开环传递函数为 习题6-1图 )1 1 .0( 200 ) ( + = s s s G 试设计一校正装置,使系统的相角裕量? ≥45 γ,剪切频率1 50- ≥s c ω。 6—6 单位反馈系统的开环传递函数为 )1 2( 4 ) ( + = s s s G c 设计一串联滞后校正装置,使系统相角裕量? ≥40 γ,并保持原有的开环增益。 6—7 设单位反馈系统的开环传递函数为 )1 25 .0 )(1 1.0( 5 ) ( + + = s s s s G 试设计一校正装置,使系统满足下列性能指标,速度误差系数1 5- =s K v ,相角裕量? ≥40 γ,剪切频率1 5.0- ≥s c ω。 6—8 单位反馈系统的开环传递函数为 )1 05 .0 )(1 25 .0( 10 ) ( + + = s s s s G 若要求校正后系统的谐振峰值4.1 = r M,谐振频率1 10- ≥s r ω,试确定校正装置的形式与参数。 6—9 单位反馈系统的结构如图所示,现用速度反馈来校正系统,校正后系统具有临界习题6-3图习题6-4图 第三章 时域分析法 1、某线性控制系统的静态速度误差系数为∞。那么,该系统至少应为几型系统? 2、已知系统的开环传递函数为100(0.11)(5) s s ++,则该系统的开环增益为 ( )。 3、某线性控制系统的静态速度误差系数为∞。那么,该系统至少应为几型系统。 答:该系统至少应为?型系统 4、控制系统的闭环极点分别为s s 12054=-=-.,,系统增益为5,试写出其闭环传递函数。 5、已知系统的开环传递函数为100(0.11)(5) s s ++,则该系统的开环增益为多少? 6、某二阶系统的闭环传递函数为2100(s) 6.4s 16s Φ= ++ ,其阻尼比ξ=? 7、设系统的传递函数为G (s )=1 52512++s s ,则系统的无阻尼自然震荡频率n ω 为多少rad/s 。? 8、一控制系统的开环传递函数为 ) 22)(15.0()5.0(10)(2++++=s s s s s s G o 。该系统是几阶系统? 9、在扰动作用点与偏差信号之间加上什么环节能使静态误差降为0? 10、典型一阶系统的传递函数为 1Ts 1+,其中的T 称为什么?;该系统的阶跃响应指标:σ%=? t s =? 11、一阶系统的闭环极点越靠近S 平面原点:( ) A 、准确度越高 B 、准确度越低 C 、响应速度越快 D 、响应速度越慢 12、某二阶系统的闭环传递函数为2200(s)28.4s 18s Φ= ++,其无阻尼自然震荡频率n ω=? /rad s 。 13、若系统的开环传递函数为10 (52) s s +,则它的开环增益为多少? 14、系统的传递函数为G (s )= 212551 s s ++,系统的阻尼比为多少? 15、某二阶系统的闭环传递函数为2200(s)28.4s 18s Φ=++,其阻尼比是多少? 16、已知二阶系统单位阶跃响应曲线呈现出等幅振荡,则其阻尼比可能为何值? 17、某系统的闭环传递函数为:()k s s s k s s G B 243223++++=,当k 为何值时,闭环系统临界稳定。 一、解:) 1()()(3132320+++?=CS R R R R CS R R s U s U i (10分) 二、解:系统的开环传函为 s a s s G )82(8)(2++= 闭环传函为 8 )82(8)()(2+++=s a s s R s Y (5分) (1) 25.0 83.2 36.0===ss n e ωξ (6分) (2) 4 25.0==ss e a (5分) 三、解: 1)j p j p p ??=+?==110 321 2)πππ?σ3 5,,332 =?=a a (10分) 3)ω=,=4,开环增益临界值为K=2 (5分) j 2±c k 四、解:列劳斯表如下 0002201123112 3 4 s s s s ??? (4分) 得辅助方程为,解得0222=+?s 1,1 21?==s s (2分) 最后得1,243=?=s s (2分) 五:解:Bode 图如下所示 (10分) 剪切频率为s rad c /75.0=ω。 (5分) 六、解:由系统方框图求得内环传递函数为: s s s s s s s H s G s G +++++=+23452 474)1()()(1)( (3分) 内环的特征方程: (1分) 04742345=++++s s s s s 由Routh 稳定判据: 01: 03 10 :16 :044: 171: 01234s s s s s (6分) 由此可知,本系统开环传函在S 平面的右半部无开环极点,即P=0。由Nyquist 图可知N=2,故 整个闭环系统不稳定,闭环特征方程实部为正的根的个数为Z=N+P=2。 (5分) 盛年不重来,一日难再晨。及时宜自勉,岁月不待人。 一、求下图所示系统的传递函数 ) (/)(0s U s U i 。 (10分) ) 1()()(313 2320+++-=CS R R R R CS R R s U s U i 一、控制系统方块图如图所示: (1)当a =0时,求系统的阻尼比ξ,无阻尼自振频率n ω和单位斜坡函数输入时的稳态误差; (2)当ξ=0.7时,试确定系统中的a 值和单位斜坡函数输入时系统的稳态误差; 系统的开环传函为 s a s s G )82(8)(2++= 闭环传函为8 )82(8 )()(2 +++=s a s s R s Y 25.0 83.2 36.0===ss n e ωξ 4 25.0==ss e a 设某控制系统的开环传递函数为 ) 22()(2 ++= s s s k s G 试绘制参量k 由0变至∞时的根轨迹图,并求开环增益临界值。 (15分) 1)j p j p p --=+-==110321 2) πππ?σ3 5 ,,332=- =a a (10分) 3)ω=j 2±,c k =4,开环增益临界值为K=2 设某系统的特征方程为23)(2 3 4 +--+=s s s s s D ,试求该系统的特征根。 列劳斯表如下 022******* 2 34s s s s --- (4分) 得辅助方程为0 222=+-s ,解得 1,121-==s s (4分) 最后得1, 2 43=-=s s 设某控制系统的开环传递函数为 )()(s H s G = ) 10016() 12.0(752 +++s s s s 试绘制该系统的Bode 图,并确定剪切频率c ω的值 剪切频率为s rad c /75.0=ω 某系统的结构图和Nyquist 图如图(a)和(b)所示,图中 2)1(1)(+=s s s G 2 3 )1()(+=s s s H 试判断闭环系统稳定性,并决定闭环特征方程 正实部根的个数。 (16分)《控制工程基础》试卷3及详细答案
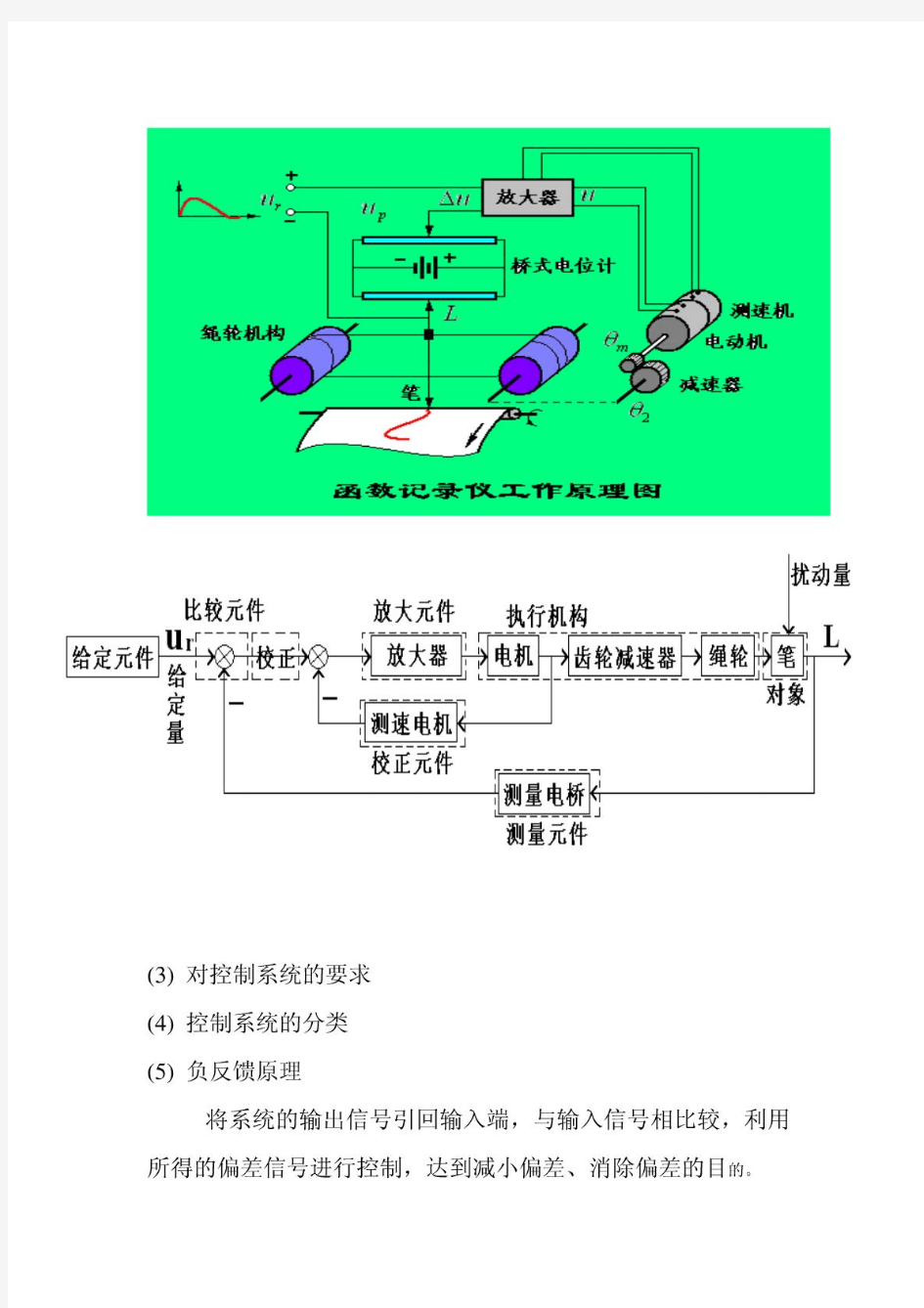
试求图示有源网络的传递函数和Bode图
自动控制第三章作业题
解系统的开环传函为
求下图所示系统的传递函数
相关主题
文本预览