集成学习:机器学习兵器谱的“屠龙刀”
发表于2015-03-02 14:55
https://www.doczj.com/doc/9c1719203.html,/article/2015-03-02/2824069
摘要:文章介绍了集成学习的概念和它的发展,它有RF和GBDT两大杀器,它有嫁接法、集成半监督学习的最新进展能够提升学习效果,文章还着重分析了集成学习成功的关键。编者按:目前机器学习领域诞生的多种算法并不见得都有很好的实战效果。本文作者认为,集成学习是一种立竿见影、从不过时的方法,堪称机器学习兵器谱上排名第一的“屠龙刀”。作者在文章中介绍了集成学习的概念和发展,它有RF和GBDT两大杀器,着重讲解了嫁接法、集成半监督学习等最新进展,以及集成学习成功的关键。
机器学习是一个大武林,这里面江湖人士颇多,“发明”出来的算法兵器也是五花八门,浩瀚如海,足够你数上三天两夜了。然而,这些兵器行走江湖能用的不多,真正无敌的更是屈指可数,或许只有屠龙刀倚天剑了。正如江湖传言:武林至尊,宝刀屠龙,号令天下,莫敢不从,倚天不出,谁与争锋? 机器学习中还真有这么一把屠龙刀、一把倚天剑。用上了这两样兵器,保你平平安安闯四方,潇潇洒洒走江湖。今天,就先絮叨絮叨这把屠龙刀。
在下以为,集成学习就是这把屠龙刀。为什么集成学习能称为“屠龙刀”呢?因为它立竿见影,好像“刀过竹解”;因为它从不过时,俨然“宝刀未老”。它是一把刀,但不是一把普通的刀;它是一把锋利的刀,一把可以屠龙的刀。集成学习在众多的机器学习/数据挖掘竞赛中往往探囊取物,屡试不爽,像屠龙刀一样当之无愧排行兵器谱第一。
什么是集成学习
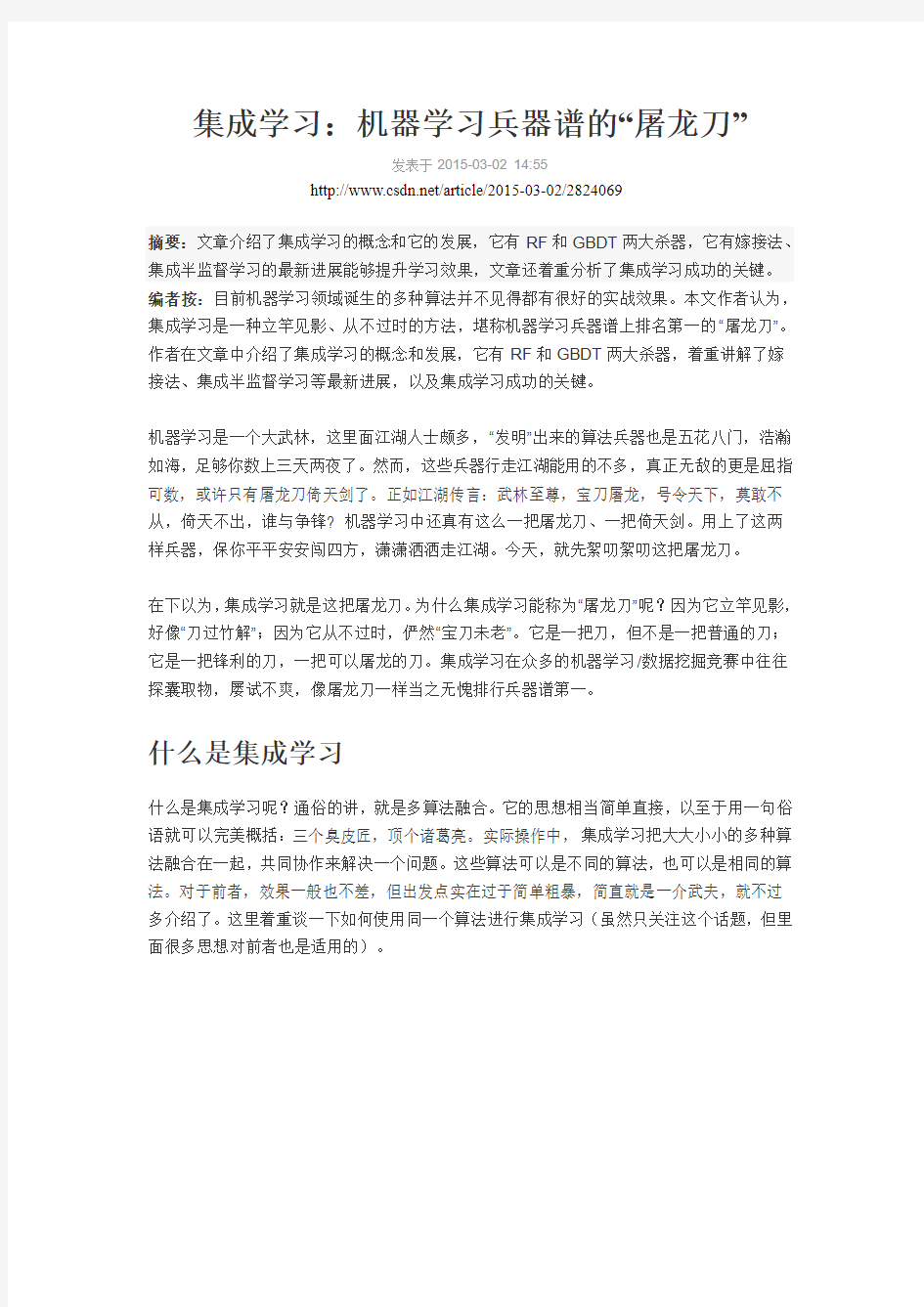
什么是集成学习呢?通俗的讲,就是多算法融合。它的思想相当简单直接,以至于用一句俗语就可以完美概括:三个臭皮匠,顶个诸葛亮。实际操作中,集成学习把大大小小的多种算法融合在一起,共同协作来解决一个问题。这些算法可以是不同的算法,也可以是相同的算法。对于前者,效果一般也不差,但出发点实在过于简单粗暴,简直就是一介武夫,就不过多介绍了。这里着重谈一下如何使用同一个算法进行集成学习(虽然只关注这个话题,但里面很多思想对前者也是适用的)。
用好集成学习有两个关键点:1)怎么训练每个算法?2)怎么融合每个算法?围绕这两个关键点,有很多方法提出来,极具代表性就是大家熟知的bagging和boosting方法,其中Bagging和boosting也是当今两大杀器RF(Random Forests)和GBDT(Gradient Boosting Decision Tree)之所以成功的主要秘诀。注意,这里我用的是“方法”,而不是“算法”,个人以为“方法”比“算法”更高一层,更抽象些,更具有普适性。
集成学习的发展
集成学习是典型的实践驱动的研究方向,它一开始先在实践中证明有效,而后才有学者从理论上进行各种分析,这是非常不同于大名鼎鼎的SVM(Support Vector Machine)的。SVM 是先有理论,然后基于理论指导实现了算法。这是机器学习研究中少有的理论指导的创新案列。直到如今,它还是部分学者用来看轻工业界发明的算法的主要证据之一。为了证明我的观点,我们就回顾下集成学习中最主流的RF的发展历程。1995年,AT&T bell实验室的香港女学者Ho Tin Kam最早提出了RF,那个时候还不叫Random Forests, 而叫RDF (Random Decision Forest),她主要是采用Random Subspace的思想使用DT(Decision Tree)来构建Forest。随后的几年里,又有一批人相继提出了大大小小的一些类似或改进
的工作,但都还不足以载入史册。历史的年轮不知不觉来到了2001年,统计学家Breiman 已开始在机器学习界站稳脚跟。他在RDF基础上又引入了Bagging技术,并提出了沿用至今的Random Forests。虽然老人家在那篇后来被引用几千次的文章里进行了“理论”分析,并给出了一个看似不错的误差上界,但其实那个公式只是个中看不中用的数学符号,没有太多的指导意义。而且,老人家在回顾Ho的工作时,相当轻描淡写,不知道何故,谨慎怀疑他对她是否有误会?【批注1】2005年,Breiman离世,集成学习理论突破的使命交给了后来人。
2005-2015这十年里,集成学习方面的论文陆续有放出,但遗憾的是,个人认为集成学习的理论进展还是非常缓慢。大多工作都是围绕一个特定的算法做分析,始终没有一个大一统的理论站稳脚跟。“理论指导实践”,这是机器学习研究者们渴望已久的灯塔,但它太远太远,以至于我们只能在茫茫迷雾中怀着这份渴望摸索前行。回顾集成学习理论的发展历程,为数不多的有用结论之一可能就是---从bias-variance分解角度分析集成学习方法【批注2】,人们意识到:Bagging主要减小了variance,而Boosting主要减小了bias,而这种差异直接推动结合Bagging和Boosting的MultiBoosting的诞生。值得一提的是,我国学者在集成学习领域并不落后,以南大周志华教授为代表的学者的一系列工作走在了世界前列,如选择集成技术、集成聚类技术、半监督集成技术等等。周志华老师还最早将Ensemble Learning 翻译为“集成学习”,是国内这一领域的先行者。
实用新方法:算法嫁接
近年来,除了上面的这些方法外,还有一些新方法涌现出来,这里就特别讨论下个人认为比较有创意而且很实用的方法,我称之为“嫁接法”。据百度百科的说法--所谓嫁接,是指植物的人工营养繁殖方法之一。即把一种植物的枝或芽,嫁接到另一种植物的茎或根上,使接在一起的两个部分长成一个完整的植株。把这个概念迁移到集成学习领域,就是把一个算法嫁接到另外一个算法上,从而形成一个新的完整的算法。为什么要这么做呢?因为嫁接后有好处啊。回想一下当下我们吃的各种水果,不少都是嫁接后的产物。不严格说来,袁隆平的杂交水稻也是一种高级的嫁接产物。嫁接后的水稻抗病害,易种植,产量还高。同样,把两种算法嫁接在一起,也能达到类似的好效果。
算法嫁接之后为什么会好呢?回答这个问题得从一个基础问题讲起。以分类算法为例,所有算法大致分为线性和非线性两类,线性算法如LR,NB,ME之类;非线性算法如DT,RF,NN之流。一般来说,线性算法训练和预测的效率较高,但效果较差,而且非常依赖人的知识。如广告CTR预估中常用的LR算法,要想达到一定的效果,需要人工或半人工的进行庞大的特征工程--进行特征的变换组合等预处理工作。有过LR使用经验的同学一定对这个过程刻骨铭心,没有一定年限的积累是做不好线性模型的。而非线性算法如DT,理论上是能自动地做这些繁琐工作的(虽然效果不一定好)。如果能借助这些算法减少人的工作,岂不大快人心?没错,LMT(Logistic Model Tree ) 应运而生,它把LR和DT嫁接在一起,实现了两者的优势互补。刚刚过去的一年,网上近乎疯传的Facebook的那个GBDT+LR的文
章,只不过是这个思想的延续,初看下来实在没啥可追捧的。不同意?先别急,这样做的确还有一些其他好处,咱们得换另外一个角度来看GBDT+LR。对比GBDT和DT会发现GBDT 较DT有两点好处:1)GBDT本身是集成学习的一种算法,效果可能较DT好;2)GBDT 中的DT一般是RT,所以预测出来的绝对值本身就有比较意义,而LR能很好利用这个值。这是个非常大的优势,尤其是用到广告竞价排序的场景上。最后需要说明的是,这只是从一个角度来理解嫁接的好处,还有其他方面就不一一展开了。
集成半监督学习的改进
虽然集成半监督技术在一些数据集或场景下取得了一定效果,个人一直偏执地不看好这个方向。个人拙见:具体到分类问题上,集成方法要想成功,要依赖的有标记的样本量要大,至少可能是要大于单个算法的。半监督学习技术虽然可取,但没有一定量的标记样本也是瞎折腾。两者都对样本要求如此苛刻,融合在一起岂不是更坏?另一方面,两派人的研究方法论不同,根本不看好融合在一起的集成半监督技术【批注3】。所以即便是co-training这样训练两个学习器的算法,实际预测时也只使用其中一个。然而,随后这方面一系列的工作有理有据,着实给人们上了生动的一课。值得一提的是,我国南大数据挖掘团队对这个领域的发展起到了推动作用,他们先是做了tri-training,co-forest等算法,验证了引入集成对半监督学习的好处。后来又在理论上证明了半监督学习引入集成会带来很大好处。而对集成学习者,他们揭示出引入半监督学习可以不牺牲个体学习器精度就能提升diversity,并设计出UDEED算法。这一系列工作得到了业界高度评价。
集成学习成功的关键
集成学习成功的关键---要千方百计围绕学习器的差异和强度做文章。这两者有非常密切而又难以描述的关系,其中有对立,也有协同,实际应用中我们要平衡好彼此。瞄准了这个方向,就能事半功倍,才能在正确的道路上越走越远。怎样解决这个关键问题呢?答案就一个字:试。如果非要多说两个字,那就是:试试。如果…你还要我多说吗?呵呵。好吧,不开玩笑了。如果你非想问出个子丑寅卯来,你可能要用好以下技术:完全随机,结合先验的伪随机,选择集成,融合进人为思维等等。最最重要的是,会根据不同问题要调一把好参,如特征相关性太强怎么调随机选取特征的比例,样本噪声太大怎么调随机选取示例的比例,正负比例不平衡时怎么做平衡等等。另外,在实际应用中,还要平衡好性能和效果,做一些工程上的优化,哪些该实时算,哪些可以离线算,哪些可以半实时都要规划好,还要使用好单机资源,多机资源,甚至牺牲效果换性能。这些点都是要注意的,用过才知道。
小结
集成学习方法是机器学习中最最实用的兵器,堪称屠龙刀。但并不是每个人都能用好这把刀,我们都要继续修炼内功,理解数据,用好数据。
希望大家牢记两句话:
1.机器学习的成功依赖数据,系统和算法,缺一不可。
2.人能做的绝不留给机器。
主要批注:
1.她是模式识别领域的,研究方法论和机器学习有很大差别。Ho主要的贡献是随机子
空间,她偶然用了一下决策树,但是从属性子空间的角度去做的,是不是决策树并不重要,而且最关键的是没有用到bootstrap,而bootstrap是bagging和RF的最精华。
从Breiman的角度看,Ho是纯属凑巧弄了个和RF看上去长得像的东西,而且这东西里面没有RF最宝贵的部分,当然不会看好。Ho的random subspace是模式识别里面很有效的技术。她自己也更看重这个。
2.bias-variance分解不是集成学习特有的,1992年German发明后借用过来的。集
成学习特有的是error-ambiguity分解。
3.集成学习者认为: 只要允许我使用多个学习器,就能把弱学习器提升到足够强,根
本不需要什么无标记样本。半监督学习者认为: 只要能让我使用无标记样本,就能把学习器提升到足够强,哪需要什么多学习器。双方各执一词,真是老死不相往来的节奏。
机械动力学考试题201207012 1.“机械动力学”主要研究哪些内容,请以任一机器为对象举例说明研究内容及其相互关 系。(10分) 答:机械动力学是研究机械在力的作用下的运动和机械在运动中产生的力,并从力与运动的相互作用的角度进行机械设计和改进的科学。 动力学主要研究内容概括起来有:1,共振分析;2,振动分析与动载荷计算;3,计算机与现代测试技术的运用;4,减震与隔振。 柴油机上的发动机,发动机不平衡时会产生很强的地面波,从而产生噪声,而承受震动的结构,发动机底座,会由于振动引起的交变应力而导致材料的疲劳失效,而且振动会加剧机械零部件的磨损,如轴承和齿轮的磨损等,并使机械中的紧固件如螺母等变松。在加工时还会导致零件加工质量变差。通过对共振的研究和分析,使机械的运转频率避免共振区,避免机械共振事故的发生,通过振动分析与动载荷计算可以求出在外力作用下机械的真实运动,运用计算机和现代测试技术对机械的运行状态进行检测,以及故障诊断,模态分析以及动态分析,现实中机器运转时由于各种激励因素的存在,不可避免发生振动,为了减小振动,通常在机器底部加装弹簧,橡胶等隔振材料。 2.机构动态静力分析主要研究哪些内容,请描述分析过程,此分析在机器设计中是为了解 决什么问题?(10分) 答:根据达朗贝尔原理,将惯性力和惯性力矩计入静力平衡方程,求出为平衡静载荷和动载荷而需要加在原动构件上施加的力或力矩,以及各运动副中的反作用力。这就是动态静力分析。 随着机械速度的提高,构件的惯性力不能再被忽略,而且采取动态静力学方法可以最大限度的优化设计,保证产品没有设计上的问题。使得机械系统在设定的限制条件下得到最佳的动态性能。 机构动态静力分析的基本步骤是:首先将所有的外力、外力矩(包括惯性力和惯性力矩以及待求的平衡力和平衡力矩)加到机构的相应构件上;然后将各构件逐一从机构中分离并加上约束反力后、写出一系列平衡方程式;最后通过联立求解这些平衡方程式,求出各运动副中的约束反力和需加于机构上的平衡力或平衡力矩。 3.转子动平衡的精度是指什么?G2.5是什么意思?(5分) 答:转子的平衡精度规定了转子的许用不平衡量,只要转子的剩余不平衡量小于许用不平衡量就可以满足工作要求。 G2.5,转子的许用不平衡量即平衡精度为2.5mm/s 4.简述在刚性运动前提下,如何进行运动构件的真实运动分析求解(请列出步骤)?(10 分) 答:首先建立等效力学模型,将复杂的机械系统简化为一个构件,即等效构件,根据质点系动能定理,将作用于机械系统上的所有外力和外力矩、所有构件的质量和转动惯量,都向等效构件转化;其次计算等效构件上的等效量(包括等效力矩,等效力,等效质量,等效转动惯量);再次建立等效构件的运动方程式,有两种形式,能量形式和力矩形式;最后通过方程式求出等效构件的角速度函数和角加速度函数,这样便可以求出机械系统的真实运动规律。 5.在弹性运动假设下,有哪些弹性动力学建模方法,各有什么特点?请解释“瞬时刚化” 的概念。(5分) 答:弹性动力学模型有集中参数模型和有限元模型。集中参数模型建立起的运动方程为常微
XXXX大学 《智能机器人》结课论文 移动机器人对运动目标的检测跟踪方法 学院(系): 专业班级: 学生学号: 学生姓名: 成绩:
目录 摘要 (1) 0、引言 (1) 1、运动目标检测方法 (1) 1.1 运动目标图像HSI差值模型 (1) 1.2 运动目标的自适应分割与提取 (2) 2 运动目标的预测跟踪控制 (3) 2.1 运动目标的定位 (3) 2.2 运动目标的运动轨迹估计 (4) 2.3 移动机器人运动控制策略 (6) 3 结束语 (6) 参考文献 (7)
一种移动机器人对运动目标的检测跟踪方法 摘要:从序列图像中有效地自动提取运动目标区域和跟踪运动目标是自主机器人运动控制的研究热点之一。给出了连续图像帧差分和二次帧差分改进的图像HIS 差分模型,采用自适应运动目标区域检测、自适应阴影部分分割和噪声消除算法,对无背景图像条件下自动提取运动目标区域。定义了一些运动目标的特征分析和计算 ,通过特征匹配识别所需跟踪目标的区域。采用 Kalrnan 预报器对运动目标状态的一步预测估计和两步增量式跟踪算法,能快速平滑地实现移动机器人对运动目标的跟踪驱动控制。实验结果表明该方法有效。 关键词:改进的HIS 差分模型;Kahnan 滤波器;增量式跟踪控制策略。 0、引言 运动目标检测和跟踪是机器人研究应用及智能视频监控中的重要关键技术 ,一直是备受关注的研究热点之一。在运动目标检测算法中常用方法有光流场法和图像差分法。由于光流场法的计算量大,不适合于实时性的要求。对背景图像的帧问差分法对环境变化有较强的适应性和运算简单方便的特点,但帧问差分不能提出完整的运动目标,且场景中会出现大量噪声,如光线的强弱、运动目标的阴影等。 为此文中对移动机器人的运动目标检测和跟踪中的一些关键技术进行了研究,通过对传统帧间差分的改进,引入 HSI 差值模型、图像序列的连续差分运算、自适应分割算法、自适应阴影部分分割算法和图像形态学方法消除噪声斑点,在无背景图像条件下自动提取运动 目标区域。采用 Kalman 滤波器对跟踪目标的运动轨迹进行预测,建立移动机器人跟踪运动 目标的两步增量式跟踪控制策略,实现对目标的准确检测和平滑跟踪控制。实验结果表明该算法有效。 1、运动目标检测方法 接近人跟对颜色感知的色调、饱和度和亮度属性 (H ,S ,I )模型更适合于图像识别处理。因此,文中引入改进 型 HSI 帧差模型。 1.1 运动目标图像HSI 差值模型 设移动机器人在某一位置采得的连续三帧图像序列 ()y x k ,f 1-,()y x f k ,,()y x f k ,1+
机器学习复习重点 判断题(共30分,每题2分,打√或×) 1、如果问题本身就是非线性问题,使用支持向量机(SVM )是难以取得好的预测效果的。(×) 2、只要使用的半监督学习方法合适,利用100个标记样本和1000个无标记样本的预测效果,同样可以达到利用1100个标记样本使用监督学习方法的预测效果。(×) 3、深度学习中应该尽量避免过拟合。(×) 4、在随机森林Bagging 过程中,每次选取的特征个数为m ,m 的值过大会降低树之间的关联性和单棵树的分类能力。(×) 5、决策树学习的结果,是得到一组规则集,且其中的规则是可以解释的。(√) 6、在FCM 聚类算法中交替迭代优化目标函数的方法不一定得到最优解。(√) 7、在流形学习ISOMAP 中,测地距离即是欧氏距离。(×) 8、贝叶斯决策实质上是按后验概率进行决策的。(√) 9、非参数估计需要较大数量的样本才能取得较好的估计结果。(√) 10、不需要显示定义特征是深度学习的优势之一。(√) 判断题为反扣分题目;答对得2分,不答得0分,答错得-2分; 问答题(共60分) 1、 从样本集推断总体概率分布的方法可以归结为哪几种类型?请分别简要解释之。 监督参数估计:样本所属的类别和各类的类条件概率密度函数的形式是已知的,而表征概率密度函数的某些参数是未知的。 非监督参数估计:已知总体概率密度函数形式,但未知样本所属类别,要求判断出概率密度函数的某些参数。 非参数估计:已知样本所属类别,但未知各类的概率密度函数的形式,要求我们直接推断概率密度函数本身。 2、什么是k-近邻算法? k-近邻算法的基本思想(3分):未知样本x ,根据度量公式得到距离x 最近的k 个样本。统计这k 个样本点中,各个类别的数量。数量最多的样本是什么类别,我们就把这个数据点定为什么类别。 ,argmax (),K m n n n x m k k n ω==是个样本中第类的样本个数 m 为所求类别。 3、 决策树的C4.5算法与ID3算法相比主要有哪些方面的改进? 1) 用信息增益比来选择属性,克服了用信息增益选择属性时偏向选择取值多的属性的不足; 2) 增加了后剪枝操作。 3) 能够完成对连续属性的离散化处理;
机械动力学 一、选择题 (共33题) 1、 动力学反问题是已知机构的(),求解输入转矩和各运动副反力及其变化规律。 A、 运动状态 B、 运动状态和工作阻力 C、 工作阻力 D、 运动状态或工作阻力 考生答案:B 2、 平衡的实质就是采用构件质量再分配等手段完全地或部分地消除()。 A、 加速度 B、 角加速度 C、 惯性载荷 D、 重力 考生答案:C 3、 摆动力的完全平衡常常会导致机械结构的()。 A、 简单化 B、 轻量化 C、 复杂化 D、 大型化 考生答案:C 4、 输入功大于输出功,其差值是()。 A、
B、 亏功 C、 正功 D、 负功 考生答案:C 5、 在含有连杆机构或凸轮机构等变速比传动的系统中,传动比仅与机构的()有关。 A、 速度 B、 角速度 C、 加速度 D、 位置 考生答案:D 6、 在研究摆动力的平衡时,不涉及惯性力矩,可以采用()。 A、 静代换 B、 动代换 C、 静力代换 D、 摆动力代换 考生答案:A 7、 以下几种方法中,不是机械刚体动力学研究的分析方法的是()。 A、 静力分析 B、 动态静力分析 C、 动力分析 D、 弹性动力分析 考生答案:D 8、 机构摆动力完全平衡的条件为:机构运动时机构的动量矩为()。
B、 关于速度的函数 C、 关于质量的函数 D、 常数 考生答案:D 9、 摆动力完全平衡的缺点有()。 A、 减少振动 B、 减小摩擦 C、 使机械结构复杂化 D、 使机械体积增加 考生答案:C 10、 描述等效构件运动的方程式形式有()。 A、 能量形式 B、 动量形式 C、 加速度形式 D、 平衡力形式 考生答案:A 11、 动态静力分析应用于()。 A、 动力学正问题 B、 运动学正问题 C、 动力学反问题 D、 运动学反问题 考生答案:C 12、
一种机器人系统重复学习控制策略 机器人系统是一类高度复杂、强耦合的非线性系统。随着工业自动化水平的不断提高,其高精度控制问题已经成为广大学者研究的热点。鉴于机器人系统往往执行重复性质运动任务的特点,重复学习控制已成为解决机器人系统的高精度轨迹跟踪问题的有效方法之一。本文介绍了重复学习控制方法和一种简单的重复学习控制策略。 关键词:机器人控制重复学习控制 Abstract Robot manipulator is a main class of highly complex and strong coupling nonlinear system. With the development of industrial automation, high precision control problem of robot manipulator has become a hot research field. Based on the observation that the robot manipulator often performs repeated movement, repetitive learning control-strategy is one of the methods to address the high precision tracking problem of robot manipulator. Key words: Robot control Repetitive learning control
1 引言 机器人系统是一类高度复杂、强耦合的非线性系统,随着工业自动化水平的不断提高,其高精度控制问题越来越成为人们研究的热点。基于机器人系统往往执行重复性质的运动任务,重复学习控制理论的发展为机器人系统的高精度控制提供了一种有效的方法。重复学习控制方法的目标是设计一个针对周期信号的跟踪控制器或者扰动补偿器,除了使用当前控制误差外,还重复使用了上一周期的误差,并与当前控制误差叠加在一起,作为偏差控制信号,来提高系统的控制品质。重复学习控制策略能够大大提高系统跟踪周期信号的能力,抑制周期性干扰,具有较好的跟踪鲁棒性能。 2机器人系统常用控制方法 机器人的高精度控制一直是机器人控制领域研究的经典问题,已取得了相当丰富的成果。机器人轨迹跟踪控制系统的主要目的是通过设计各关节的驱动力矩,使得机器人的位置、速度等状态变量跟综给定的理想轨迹。到目前为止,应用在机器人轨迹跟踪控制上的控制方法大致可以分为两类:基于模型的控制方法和不基于模型的控制方法。 2.1 基于模型的控制方法 基于被控对象数学模型的控制方法有前馈补偿控制、计算力矩控制(反馈线性化方法)、自适应控制、反演控制设计方法等。这些方法都依赖与系统的数学模型。在实际工程中,由于机器人是一类高度复杂、高度耦合的非线性系统,很难得到机器人精确的数学模型,使得这些方法在实际应用中有些吃力。 2.2 不基于模型的控制方法 由于测量和建模的不精确性,再加上负载的变化以及外部扰动的影响,实际上无法得到机器人精确、完整的动力学模型,使得基于模型的控制方法在实际领域中的控制精度并不是很高。下面是几种不基于模型的控制方法:PID 控制,鲁 棒控制,神经网络控制和模糊控制,迭代学习控制和变结构(滑模)控制。 3 重复学习控制 重复学习控制针对受控对象执行重复性质的运动任务,用前一个周期的控制误差来改善后一周期的控制,需要存储器来记录过去的误差信息,重复学习控制
机器学习实战(用Scikit-learn和TensorFlow进行机器学习) 一、简介 Scikit-learn集成了很多机器学习需要使用的函数,学习Scikit-learn能简洁、快速写出机器学习程序。并且通过代码更加深入的了解机器学习模型,学习如何处理数据,如何选择模型,如何选择和调整模型参数。 二、配置必要的环境 1、推荐安装Anaconda(集成Python和很多有用的Package) 2、编辑器:Spyder 或 Pycharm 或 Jupyter Notebook 三、开始实战(处理CSV表格数据) 1、下载数据 数据集为房屋信息housing,代码运行后,会下载一个tgz文件,然后用tarfile解压,解压后目录中会有一个housing.scv文件(可以自行用excel打开看看),下载代码为: import os import tarfile from six.moves import urllib DOWNLOAD_ROOT = "https://https://www.doczj.com/doc/9c1719203.html,/ageron/handson-ml/master/" HOUSING_PATH = "datasets/housing" HOUSING_URL = DOWNLOAD_ROOT + HOUSING_PATH + "/housing.tgz" def fetch_housing_data(housing_url=HOUSING_URL, housing_path=HOUSING_PATH): if not os.path.isdir(housing_path): os.makedirs(housing_path) tgz_path = os.path.join(housing_path, "housing.tgz") urllib.request.urlretrieve(housing_url, tgz_path) housing_tgz = tarfile.open(tgz_path) housing_tgz.extractall(path=housing_path) housing_tgz.close()
集成学习综述 梁英毅 摘要 机器学习方法在生产、科研和生活中有着广泛应用,而集成学习则是机器学习的首要热门方向[1]。集成学习是使用一系列学习器进行学习,并使用某种规则把各个学习结果进行整合从而获得比单个学习器更好的学习效果的一种机器学习方法。本文对集成学习的概念以及一些主要的集成学习方法进行简介,以便于进行进一步的研究。 一、 引言 机器学习是计算机科学中研究怎么让机器具有学习能力的分支,[2]把机器学习的目标归纳为“给出关于如何进行学习的严格的、计算上具体的、合理的说明”。[3]指出四类问题的解决对于人类来说是困难的甚至不可能的,从而说明机器学习的必要性。 目前,机器学习方法已经在科学研究、语音识别、人脸识别、手写识别、数据挖掘、医疗诊断、游戏等等领域之中得到应用[1, 4]。随着机器学习方法的普及,机器学习方面的研究也越来越热门,目前来说机器学习的研究主要分为四个大方向[1]: a) 通过集成学习方法提高学习精度; b) 扩大学习规模; c) 强化学习; d) 学习复杂的随机模型; 有关Machine Learning 的进一步介绍请参考[5, 1,3, 4, 6]。 本文的目的是对集成学习的各种方法进行综述,以了解当前集成学习方面的进展和问题。本文以下内容组织如下:第二节首先介绍集成学习;第三节对一些常见的集成学习方法进行简单介绍;第四节给出一些关于集成学习的分析方法和分析结果。 二、 集成学习简介 1、 分类问题 分类问题属于概念学习的范畴。分类问题是集成学习的基本研究问题,简单来说就是把一系列实例根据某种规则进行分类,这实际上是要寻找某个函数)(x f y =,使得对于一个
机械动力学复习试题 1、试求图1-1所示系统的等效弹簧常数,并导出其运动微分方程。 2、一无质量的刚性杆铰接于O ,如图2-1所示。试确定系统振动的固有频率,给出参数如下:k 1=2500磅/英寸(4.3782×105N/m ), K 2=900磅/英寸(1.5761×105N/m ), m=1磅*秒2/英寸(175.13kg ), a=80英寸 (2.03m), b=100英寸(2.54m )。 3、试求出图3-1所示系统的固有频率。弹簧是线性的,滑轮对中心0的转动惯量为I 。设R=2500磅/英寸(4.3782×105N/m ), I=600磅*英寸*秒2(67.79N*m*s 2), m=2.5磅*秒2/英寸(437.82kg ), R=20英寸(0.5/m ) 4、一台质量为M 的机器静止地置于无质量的弹性地板上,如图4-1所示。当一单位载荷作用于中心点时的挠度为x st 。今在机器上放有一总质量为ms并带有两个旋转的不平衡质量的振动器提供一铅垂的谐波力mlw 2sinwt ,这里,转动的频率w 是可以改变的。试说明怎样用此振动器来测定系统弯曲振动的固有频率。 2 k 图3-1 图2-1
5,、图5-1中所示的系统模拟一在粗糙道路上运动的车辆,速度为均匀,即V=常数。试计算其响应Z(t)和传给车辆的力。 图5-1 6,、试导出如图6-1所示系统的运动微分方程,并求解位移X1(t)。
7、转动惯量分别为I 1和I 2的两个圆盘安装在扭转刚度分别为GJ 1和GJ 2的圆轴上如图7-1。导出这两个圆盘的转动微分方程。 8、导出图8-1所示系统当θ为微小角时的运动微分方程。 图 6-1 GJ 1 GJ 2 1() t θ2()t θ M 2(t) M 1(t) I 1 I 2
龙源期刊网 https://www.doczj.com/doc/9c1719203.html, 主从式机器人的系统控制策略 作者:张景生 来源:《科学与财富》2016年第16期 摘要:本文主要针对主从式机器人的系统控制策略展开了探讨,对机器人的控制作了详 细的阐述,并为主从式机器人的控制策略及解算作了系统的分析,以期能为有关方面的需要提供有益的参考和借鉴。 关键词:主从式机器人;系统;控制策略 0 引言 随着科学信息技术的不断应用发展,主从式机器人系统的应用也得到了相应的创新进步。然而在真正的应用过程中,若要进一步掌握主从式机器人的系统,就必须要采取有效的策略做好系统的控制。基于此,本文就主从式机器人的系统控制策略进行了探讨,相信对有关方面的需要能有一定的帮助。 1 机器人控制 从工业机器人的系统构成来看,大致可以分为动作部分、检测部分和控制部分,如图1所示。动作部分相当与机器人手臂、腕部、手指和行走机构足等具有动作功能的部分;检测部分是获得来自于操作对象物、机器人自身以及环境的种种信息,并对其作信息处理来认识对象物,感知自身状态和识别环境的部分;控制部分是基于来自检测等部分的信息,为了使动作部分完成目标操作所承担的控制功能的部分。 图1 机器人系统 1.1 机器人控制方式 机器人控制器是一个计算机控制系统,它包含高性能计算机,与机器人运动学和动力学建模有密切联系,并以机器人控制技术为理论。机器人控制器有多种不同控制策略,有非伺服(开环)控制、伺服控制、基于传感信息的控制、最优PID控制、非线性反馈的动态补偿控制、自适应控制、变结构(滑模)控制、模糊控制、分级分散的多臂(或多机器人)协调控制等,但目前实用的多数还是PID伺服控制。 1.2 机器人控制的主要控制变量 一台机器人的各关节控制变量。X(t)表示末端执行装置在空间的实时位置。只有当关节θ1~θ6移动时,X才变化。用矢量θ(t)来表示关节变量θ1至θ6。各关节在力矩C1~C6作用下而运动,这些力矩构成矢量C(t);矢量C(t)由各传动电动机的力矩矢量T(t)经过
机械系统动力学 简化串联机器人的运动学与动力学仿真分析 学院:机械工程学院 专业:机械设计制造 及其自动化 学生姓名: 学号: 指导教师: 完成日期: 2015.01.09
摘要 在机器人研究中,串联机器人研究得较为成熟,其具有结构简单、成本低、控制简单、运动空间大等优点,已成功应用于很多领域。本文在ADAMS 中用连杆模拟两自由度的串联机器人(机械臂),对其分别进行运动学分析、动力学分析。得出该机构在给出工作条件下的位移、速度、加速度曲线和关节末端的运动轨迹。 关键词:机器人;ADAMS;曲线;轨迹 一、ADAMS软件简介 ADAMS,即机械系统动力学自动分析(Automatic Dynamic Analysis of Mechanical Systems),该软件是美国MDI公司(Mechanical Dynamics Inc.) (现已并入美国MSC公司)开发的虚拟样机分析软件。目前,ADAMS已经被全世界各行各业的数百家主要制造商采用。ADAMS软件使用交互式图形环境和零件库、约束库、力库,创建完全参数化的机械系统几何模型,其求解器采用多刚体系统动力学理论中的拉格朗日方程方法,建立系统动力学方程,对虚拟机械系统进行静力学、运动学和动力学分析,输出位移、速度、加速度和反作用力曲线。ADAMS软件的仿真可用于预测机械系统的性能、运动范围、碰撞检测、峰值载荷以及计算有限元的输入载荷等。 二、简化串联机器人的运动学仿真 (1)启动ADAMS/View。 在欢迎对话框中选择新建模型,模型取名为robot,并将单位设置为MMKS,然后单击OK。 (2)打开坐标系窗口。 按下F4键,或者单击菜单【View】→【Coordinate Window】后,打开坐标系窗口。当鼠标在图形区移动时,在坐标窗口中显示了当前鼠标所在位置的坐标值。
连续介质力学 它是研究质量连续分布的可变形物体的运动规律,主要讨论一切连续介质普遍遵从的力学规律。例如,质量守恒、动量和角动量定理、能量守恒等。弹性体力学和流体力学有时综合讨论称为连续介质力学。 转子动力学 固体力学的分支。主要研究转子-支承系统在旋转状态下的振动、平衡和稳定性问题,尤其是研究接近或超过临界转速运转状态下转子的横向振动问题。转子是涡轮机、电机等旋转式机械中的主要旋转部件。 大朗贝尔原理 在质点受力运动的任何时刻,作用于质点的主动力、约束力和惯性力互相平衡。利用达朗贝尔原理,可将质点系动力学问题化为静力学问题来解决 模态分析是研究结构动力特性一种近代方法,是系统辨别方法在工程振动领域中的应用。模态是机械结构的固有振动特性,每一个模态具有特定的固有频率、阻尼比和模态振型。这些模态参数可以由计算或试验分析取得,这样一个计算或试验分析过程称为模态分析。这个分析过程如果是由有限元计算的方法取得的,则称为计算模记分析;如果通过试验将采集的系统输入与输出信号经过参数识别获得模态参数,称为试验模态分析。通常,模态分析都是指试验模态分析。振动模态是弹性结构的固有的、整体的特性。如果通过模态分析方法搞清楚了结构物在某一易受影响的频率范围内各阶主要模态的特性,就可能预言结构在此频段内在外部或内部各种振源作用下实际振动响应。因此,模态分析是结构动态设计及设备的故障诊断的重要方法。 机器、建筑物、航天航空飞行器、船舶、汽车等的实际振动千姿百态、瞬息变化。模态分析提供了研究各种实际结构振动的一条有效途径。首先,将结构物在静止状态下进行人为激振,通过测量激振力与胯动响应并进行双通道快速傅里叶变换(FFT)分析,得到任意两点之间的机械导纳函数(传递函数)。用模态分析理论通过对试验导纳函数的曲线拟合,识别出结构物的模态参数,从而建立起结构物的模态模型。根据模态叠加原理,在已知各种载荷时间历程的情况下,就可以预言结构物的实际振动的响应历程或响应谱。
集成学习算法的比较研究 张沧生1,崔丽娟2,杨 刚3,倪志宏1 (1.河北大学计算中心,河北保定 071002;2.河北大学图书馆,河北保定 071002; 3.河北大学数学与计算机学院,河北保定 071002) 摘 要:从差异性出发,研究了基于特征技术与数据技术的集成学习算法,深入分析了这些集成学习算法产生差异性的方法;针对决策树与神经网络模型在标准数据集对集成学习算法进行了实验研究,结果表明集成学习算法的性能依赖于数据集的特性以及产生差异性的方法等因素,并且基于数据的集成学习算法的性能优于基于特征集的集成学习算法的性能. 关键词:差异性;特征集;重取样;分类;泛化 中图分类号:TP 301.6 文献标识码:A 文章编号:1000-1565(2007)05-0551-04 Comparative Study for E nsemble Learning Algorithms ZH ANG Cang 2sheng 1,CUI Li 2juan 2,Y ANG Gang 3,NI Zhi 2hong 1 (https://www.doczj.com/doc/9c1719203.html,puter Center ,Hebei University ,Baoding 071002,China ;2.Library ,Hebei University , Baoding 071002,China ;3.College of Mathematics and Computer ,Hebei University ,Baoding 071002,China ) Abstract :From point of view of diversity ,ensemble learning algorithms based on feature set and data tech 2nique are studied.Methods of creating diversity for these ensemble learning algorithms are deeply analyzed.And experimental studies for using decision trees and neural networks as basis models are conducted on 10standard data sets.They show that performances of ensemble learning algorithms depend on character of data set ,method of creating diversity ,and etc.Furthermore ,performances of ensemble learning algorithms based on data are su 2perior to one based on feature set. K ey w ords :diversity ;feature set ;sampling with replacement ;classification ;generalization 自20世纪90年代以来,集成学习引起了机器学习研究者的极大兴趣,并且集成学习很快成为了机器学习的研究热点之一,并在数据挖掘、模式识别、文本分类、预测等方面获得了应用.目前,文献中存在许多集成学习算法,大致可归为如下几类:在线或者增量式集成算法、软集成学习算法、采用不同的技术优选模型的集成算法、具有抗噪能力的集成算法、小规模数据集的集成学习算法等.实际上,研究者仍在不断努力研究集成学习的差异性及其各种融合方法[1-3].本文主要研究基于特征集与数据技术的集成学习方法.特征集技术是通过一定的策略选取特征子集来获得差异性的一类方法,而究竟如何选取这些特征子集存在许多不同的方法,比如采用枚举方法选取特征子集、随机方法选取特征子集、使用遗传算法选取特征子集等;而基于数据技术是采用随机的方法选取不同训练数据,然后利用这些训练数据生成集成中的个体,其目的是通过随机选取数据方法获取集成个体间的差异性. 收稿日期:2007-01-20 作者简介:张沧生(1957-),男,河北衡水人,河北大学实验师,主要从事信息管理与检索方面的研究. 第27卷 第5期 2007年 9月河北大学学报(自然科学版)Journal of Hebei University (Natural Science Edition )Vol.27No.5Sep.2007
《机械动力学》期末复习题及答案1、判断 1.机构平衡问题在本质上是一种以动态静力分析为基础的动力学综合,或动力学设计。 答案:正确 2.优化平衡就是采用优化的方法获得一个绝对最佳解。 答案:错误 3.惯性力的计算是建立在主动构件作理想运动的假定的基础上的。 答案:正确 4.等效质量和等效转动惯量与机械驱动构件的真实速度无关。 答案:正确 5.作用于等效构件上的等效力(或等效力矩)所作的功等于作用于系统上的外力所作的功。答案:错误 6.两点动代换后的系统与原有系统在静力学上是完全等效的。 答案:错误 7.对于不存在多余约束和多个自由度的机构,动态静力分析是一个静定问题。 答案:错误 8.摆动力的完全平衡常常会导致机械结构的简单化。 答案:错误 9.机构摆动力完全平衡的条件是:机构运动时,其总质心作变速直线运动。 答案:错误 10.等效质量和等效转动惯量与质量有关。 答案:错误 11.平衡是在运动设计完成之前的一种动力学设计。 答案:错误 12.在动力分析中主要涉及的力是驱动力和生产阻力。 答案:正确 13.当取直线运动的构件作为等效构件时,作用于系统上的全部外力折算到该构件上得到等效力。 答案:正确 14.摆动力的平衡一定会导致机械结构的复杂化。 答案:错误 15.机器人操作机是一个多自由度的闭环的空间机构。 答案:错误 16.质量代换是将构件的质量用若干集中质量来代换,使这些代换质量与原有质量在运动学上等效 答案:正确 17.弹性动力分析考虑构件的弹性变形。 答案:正确 18.机构摆动力矩完全平衡的条件为机构的质量矩为常数。 答案:错误 19.拉格朗日方程是研究约束系统静力动力学问题的一个普遍的方法。 答案:正确
工业机器人控制系统 20世纪80年代以后,由于微型计算机的发展,特别是电力半导体器件的出现,使整个机器人的控制系统发生了很大的变化,使机器人控制器日趋完善。具有非常好的人机界面,有功能完善的编程语言和系统保护,状态监控及诊断功能。同时机器人的操作更加简单,但是控制精度及作业能力却有很大的提高。目前机器人已具有很强的通信能力,因此能连接到各种网络(CAN—BUS、PROFIBUS或ETHERNET)。形成了机器人的生产线。特别是汽车的焊接生产线、油漆生产线、装配生产线很多都是靠机器人工作的。特别是控制系统已从模拟式的控制进入了全数字式的控制。 90年代以后,计算机的性能进一步提高,集成电路(IC)的集成度进一步的提高,使机器人的控制系统的价格逐渐降低,而运算的能力却大大提高,这样,过去许多用硬件才能实现的功能也逐渐地使用软件来完成。而且机器人控制系统的可靠性也由最早几百小时提高到现在的6万小时,几乎不需要维护。 一、控制系统基本原理及分类 工业机器人的控制器在要求完成特定作业时,需要做下述几件事:示教:通过计算机来接受机器人将要去完成什么作业。也就是给机器人的作业命令,这个命令实质上是人发出的。 计算:这一部分实际上就是机器人控制系统中的计算机来完成的,它通过获得的示教信息要形成一个控制策略,然后再根据这个策
略(也称之为作业轨迹的规划)细化成各轴的伺服运动的控制 的策略。同时计算机还要担负起对整个机器人系统的管理,采 集并处理各种信息。因此,这一部分是非常重要的核心部分。伺服驱动:就是通过机器人控制器的不同的控制算法将机器人控制策略转化为驱动信号,驱动伺服电动机,实现机器人的高速、 高精度运动,去完成指定的作业。 反馈:机器人控制中的传感器对机器人完成作业过程中的运动状态、位置、姿态进行实时地反馈,把这些信息反馈给控制计算机, 使控制计算机实时监控整个系统的运行情况,及时做出各种决 策。 图1 机器人控制基本原理图 控制系统可以有四种不同分类方法:控制运动方式、控制系统信号类型、控制机器人的数目以及人机的相互关系等分类。 (1)、按控制运动方式进行分类可分为程序控制系统、自适应控制系统和组合控制系统。 A、程序控制系统:绝大多数商品机器人是属于这种控制系统,主 要用于搬运、装配、点焊等点位控制,以及弧焊、喷涂机器人的轮廓控制。
机器学习研究现状与发展趋势 摘要: 机器学习是研究计算机怎样模拟或实现人类的学习行为,以获取新的知识或技能,重新组织已有的知识结构使之不断改善自身的性能。它是人工智能的核心,是使计算机具有智能的根本途径,其应用遍及人工智能的各个领域,它主要使用归纳、综合而不是演译。 机器学习是关于理解与研究学习的内在机制、建立能够通过学习自动提高自身水平的计算机程序的理论方法的。近年来机器学习理论在诸多应用领域得到成功的应用与发展,已成为计算机科学的基础及热点之一。采用机器学习方法的计算机程序被成功用于机器人下棋程序、语音识别、信用卡欺诈监测、自主车辆驾驶、智能机器人等应用领域,除此之外机器学习的理论方法还被用于大数据集的数据挖掘这一领域。实际上,在任何有经验可以积累的地方,机器学习方法均可发挥作用。 机器学习的研究是根据生理学、认知科学等对人类学习机理的了解,建立人类学习过程的计算模型或认识模型,发展各种学习理论和学习方法,研究通用的学习算法并进行理论上的分析,建立面向任务的具有特定应用的学习系统。这些研究目标相互影响相互促进。 本文主要叙述了 1.机器学习的研究现状,包括定义,应用领域,研究意义,发展史,系统结构,和对其进行各种角度的分类. 2.机器学习的发展趋势。 引言: 1
按照人工智能大师西蒙的观点,学习就是系统在不断重复的工作中对本身能力的增强或者改进,使得系统在下一次执行同样任务或类似任务时,会比现在做得更好或效率更高。西蒙对学习给出的定义本身,就说明了学习的重要作用。 机器能否象人类一样能具有学习能力呢?1959年美国的塞缪尔(Samuel)设计了一个下棋程序,这个程序具有学习能力,它可以在不断的对奕中改善自己的棋艺。4年后,这个程序战胜了设计者本人。又过了3年,这个程序战胜了美国一个保持8年之久的常胜不败的冠军。这个程序向人们展示了机器学习的能力,提出了许多令人深思的社会问题与哲学问题。 什么叫做机器学习?至今,还没有统一的“机器学习”定义,而且也很难给出一个公认的和准确的定义。为了便于进行讨论和估计的进展,有必要对机器学习给出定义,即使这种定义是不完全的和不充分的。顾名思义,机器学习是研究如何使用机器来模拟人类学习活动的一门。稍为严格的提法是:机器学习是一门研究机器获取新知识和新技能,并识别现有知识的学问。这里所说的“机器”,指的就是计算机;现在是电子计算机,以后还可能是中子计算机、光子计算机或神经计算机等等。 机器学习的研究是根据生理学、认知科学等对人类学习机理的了解,建立人类学习过程的计算模型或认识模型,发展各种学习理论和学习方法,研究通用的学习算法并进行理论上的分析,建立面向任务的具有特定应用的学习系统。这些研究目标相互影响相互促进。 机器学习是关于理解与研究学习的内在机制、建立能够通过学习自动提高自身水平的计算机程序的理论方法的。近年来机器学习理论在诸多应用领域得到成功的应用与发展,已成为计算机科学的基础及热点之一。 机器学习已经有了十分广泛的应用例如搜索引擎、医学诊断、检测信用卡欺诈、证券市场分析、DNA序列测序、语音和手写识别、战略游戏和机器人运用。 与机器学习有关的学术活动空前活跃。国际上除每年一次的机器学习研讨会外,还有计算机学习理论会议以及遗传算法会议。 机器学习是继专家系统之后人工智能应用的又一重要研究领域,也是人工智能和神经计 1
机器人控制的基本方法 机器人的控制方法,根据控制量、控制算法的不同分为多种类型。下面分别针对不同的类型,介绍常用的机器人控制方法。 一、根据控制量分类 按照控制量所处空间的不同,机器人控制可以分为关节空间的控制和笛卡尔空间的控制。对于串联式多关节机器人,关节空间的控制是针对机器人各个关节的变量进行的控制,笛卡尔空间控制是针对机器人末端的变量进行的控制。按照控制量的不同,机器人控制可以分为:位置控制、速度控制、加速度控制、力控制、力位混合控制等。这些控制可以是关节空间的控制,也可以是末端笛卡尔空间的控制。 位置控制的目标是使被控机器人的关节或末端达到期望的位置。下面以关节空间位置控制为例,说明机器人的位置控制。如图1-1所示,关节位置给定值与当前值比较得到的误差作为位置控制器的输入量,经过位置控制器的运算后,其输出作为关节速度控制的给定值。关节位置控制器常采用PID算法,也可以采用模糊控制算法。 图1-1 关节位置控制示意图 在图1-1中,去掉位置外环,即为机器人的关节速度控制框图。通常,在目标跟踪任务中,采用机器人的速度控制。此外,对于机器人末端笛卡尔空间的位置、速度控制,其基本原理与关节空间的位置和速度控制类似。 图1-2 加速度控制示意图 图1-2所示为分解加速度运动控制示意图。首先,计算出末端工具的控制加速度。然后,根据末端的位置,速度和加速度期望值,以及当前的末端位置、关节位置与速度,分解出各关节相应的加速度,再利用动力学方程计算出控制力矩。
分解加速度控制,需要针对各个关节进行力矩控制。 图1-3 关节力/力矩控制示意图 图1-3为关节的力/力矩控制框图。由于关节力/力矩不易直接测量,而关节电机的电流又能够较好的反映关节电机的力矩,所以常采用关节电机的电流表示当前关节力/力矩的测量值。力控制器根据力/力矩的期望值与测量值之间的偏差,控制关节电机,使之表现出期望的力/力矩特性。 图1-4 力位混合控制框图 图1-4所示为一种力位混合控制的框图,它由位置控制和力控制两部分组成。位置控制为PI控制,给定为机器人末端的笛卡尔空间位置,末端的笛卡尔空间位置反馈由关节空间的位置经过运动学计算得到。图中,T为机器人的运动学模型,J为机器人的雅克比矩阵。末端位置的给定值与当前值之差,利用雅克比矩阵的逆矩阵转换为关节空间的位置增量,再经过PI运算后,作为关节位置增量的一部分。力控制同样为PI控制,给定为机器人末端的笛卡尔空间力/力矩,反馈由力/力矩传感器测量获得。末端力/力矩的给定值与当前值之差,利用雅克比矩阵的转置矩阵转换为关节空间的力/力矩。关节空间的力/力矩经过PI运算后,作为关节位置增量的另一部分。位置控制部分和力控制部分的输出,相加后作为机器人关节的位置增量期望值。机器人利用增量控制,对其各个关节的位置进行控制。图1-5所示的力位混合控制,只是力位混合控制中的一种简单方案,是 R-C(Raibert-Craig)力位混合控制的简化形式,在实际应用中应针对具体环境进行一些必要的修正。 二、根据控制算法分类 按照控制算法的不同,机器人的控制方法可以分为PID控制、变结构控制、
机械动力学期末复习题 及答案 Company number【1089WT-1898YT-1W8CB-9UUT-92108】
《机械动力学》期末复习题及答案1、判断 1.机构平衡问题在本质上是一种以动态静力分析为基础的动力学综合,或动力学设计。 答案:正确 2.优化平衡就是采用优化的方法获得一个绝对最佳解。 答案:错误 3.惯性力的计算是建立在主动构件作理想运动的假定的基础上的。 答案:正确 4.等效质量和等效转动惯量与机械驱动构件的真实速度无关。 答案:正确 5.作用于等效构件上的等效力(或等效力矩)所作的功等于作用于系统上的 外力所作的功。答案:错误 6.两点动代换后的系统与原有系统在静力学上是完全等效的。 答案:错误 7.对于不存在多余约束和多个自由度的机构,动态静力分析是一个静定问题。答案:错误 8.摆动力的完全平衡常常会导致机械结构的简单化。 答案:错误 9.机构摆动力完全平衡的条件是:机构运动时,其总质心作变速直线运动。
答案:错误 10.等效质量和等效转动惯量与质量有关。 答案:错误 11.平衡是在运动设计完成之前的一种动力学设计。 答案:错误 12.在动力分析中主要涉及的力是驱动力和生产阻力。 答案:正确 13.当取直线运动的构件作为等效构件时,作用于系统上的全部外力折算到该构件上得到等效力。 答案:正确 14.摆动力的平衡一定会导致机械结构的复杂化。 答案:错误 15.机器人操作机是一个多自由度的闭环的空间机构。 答案:错误 16.质量代换是将构件的质量用若干集中质量来代换,使这些代换质量与原有质量在运动学上等效 答案:正确 17.弹性动力分析考虑构件的弹性变形。 答案:正确 18.机构摆动力矩完全平衡的条件为机构的质量矩为常数。 答案:错误 19.拉格朗日方程是研究约束系统静力动力学问题的一个普遍的方法。
机器人动力学研究的典型方法和应用 (燕山大学 机械工程学院) 摘 要:本文介绍了动力学分析的基础知识,总结了机器人动力学分析过程中比较常用的动力学分析的方法:牛顿—欧拉法、拉格朗日法、凯恩法、虚功原理法、微分几何原理法、旋量对偶数法、高斯方法等,并且介绍了各个方法的特点。并通过对PTl300型码垛机器人弹簧平衡机构动力学方法研究,详细分析了各个研究方法的优越性和方法的选择。 前 言:机器人动力学的目的是多方面的。机器人动力学主要是研究机器人机构的动力学。机器人机构包括机械结构和驱动装置,它是机器人的本体,也是机器人实现各种功能运动和操作任务的执行机构,同时也是机器人系统中被控制的对象。目前用计算机辅助方法建立和求解机器人机构的动力学模型是研究机器人动力学的主要方法。动力学研究的主要途径是建立和求解机器人的动力学模型。所谓动力学模指的是一组动力学方程(运动微分方程),把这样的模型作为研究力学和模拟运动的有效工具。 报告正文: (1)机器人动力学研究的方法 1)牛顿—欧拉法 应用牛顿—欧拉法来建立机器人机构的动力学方程,是指对质心的运动和转动分别用牛顿方程和欧拉方程。把机器人每个连杆(或称构件)看做一个刚体。如果已知连杆的表征质量分布和质心位置的惯量张量,那么,为了使连杆运动,必须使其加速或减速,这时所需的力和力矩是期望加速度和连杆质量及其分布的函数。牛顿—欧拉方程就表明力、力矩、惯性和加速度之间的相互关系。 若刚体的质量为m ,为使质心得到加速度a 所必须的作用在质心的力为F ,则按牛顿方程有:ma F = 为使刚体得到角速度ω、角加速度εω= 的转动,必须在刚体上作用一力矩M , 则按欧拉方程有:εωI I M += 式中,F 、a 、M 、ω、ε都是三维矢量;I 为刚体相对于原点通过质心并与刚