Ⅱ级机构的杆组分析法通用子程序
随着电子计算机的普及,用解析法对机构进行运动分析得到越来越广泛的应用。解析法中有矢量方程解析、复数矢量、杆组分析、矩阵运算等方法。本附录采用杆组分析的方法,设计通用的Ⅱ级杆组子程序,可对一般的Ⅱ级机构进行运动分析。
1. 单杆运动分析子程序
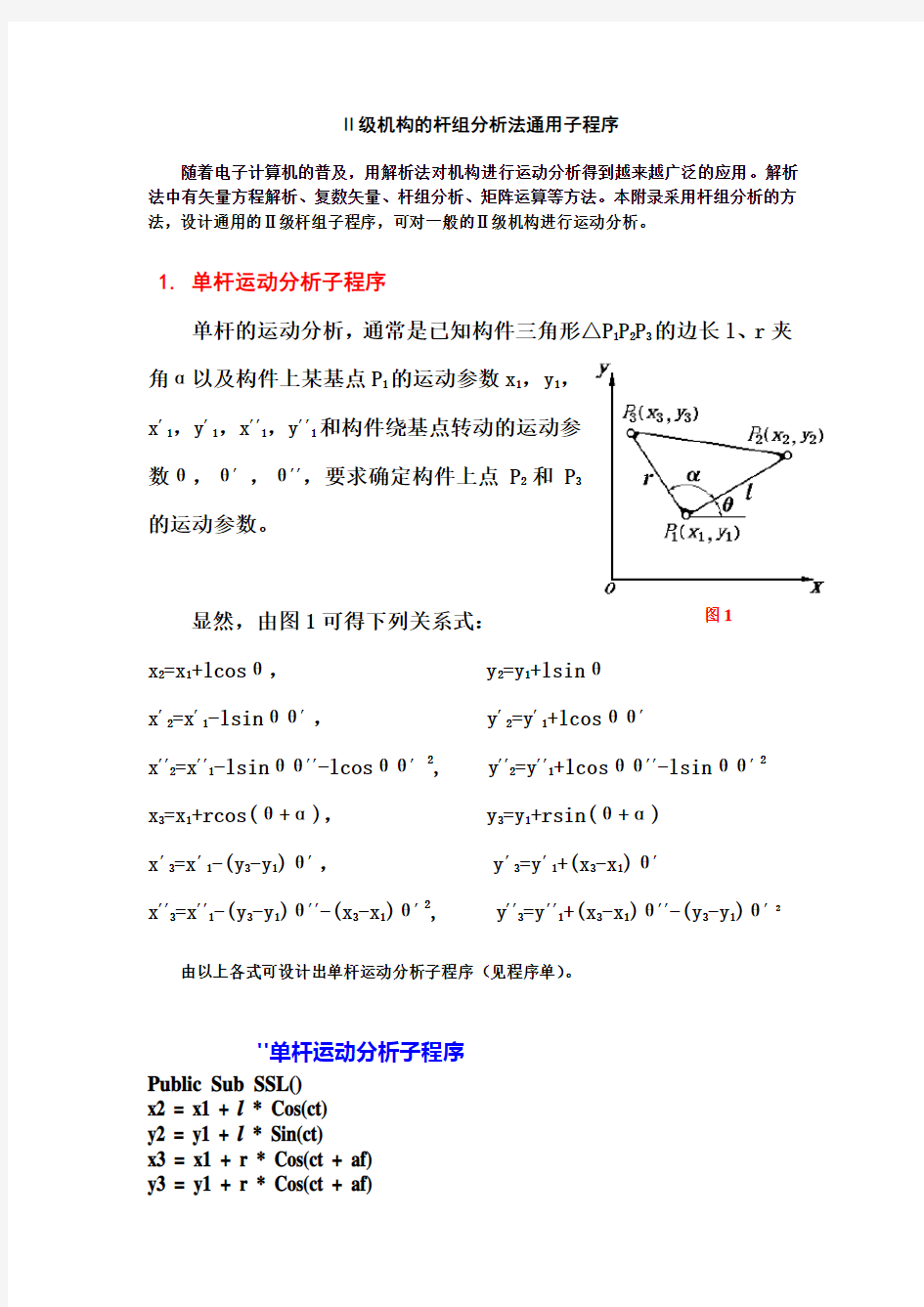
单杆的运动分析,通常是已知构件三角形△P1P2P3的边长l、r夹
x’1,y’1,x’’1,y’’1和构件绕基点转动的运动参
数θ,θ’,θ’’,要求确定构件上点P2和P3
的运动参数。
图1显然,由图1可得下列关系式:
x2=x1+lcosθ, y2=y1+lsinθ
x’2=x’1-lsinθθ’, y’2=y’1+lcosθθ’
x’’2=x’’1-lsinθθ’’-lcosθθ’2, y’’2=y’’1+lcosθθ’’-lsinθθ’2
x3=x1+rcos(θ+α), y3=y1+rsin(θ+α)
x’3=x’1-(y3-y1)θ’, y’3=y’1+(x3-x1)θ’
x’’3=x’’1-(y3-y1)θ’’-(x3-x1)θ’2, y’’3=y’’1+(x3-x1)θ’’-(y3-y1)θ’2由以上各式可设计出单杆运动分析子程序(见程序单)。
''单杆运动分析子程序
Public Sub SSL()
x2 = x1 + l * Cos(ct)
y2 = y1 + l * Sin(ct)
x3 = x1 + r * Cos(ct + af)
y3 = y1 + r * Cos(ct + af)
If (kp = 1) Then
xv2 = xv1 - l * Sin(ct) * cv yv2 = yv1 + l * Cos(ct) * cv
xa2 = xa1 - l * Sin(ct) * ca - l * Cos(ct) * cv * cv ya2 = ya1 + l * Cos(ct) * ca - l * Sin(ct) * cv * cv xv3 = xv1 - (y3 - y1) * cv yv3 = yv1 + (x3 - x1) * cv
xa3 = xa1 - (y3 - y1) * ca - (x3 - x1) * cv * cv ya3 = ya1 + (x3 - x1) * ca - (y3 - y1) * cv * cv End If End Sub
2. RRR
杆组运动分析子程序
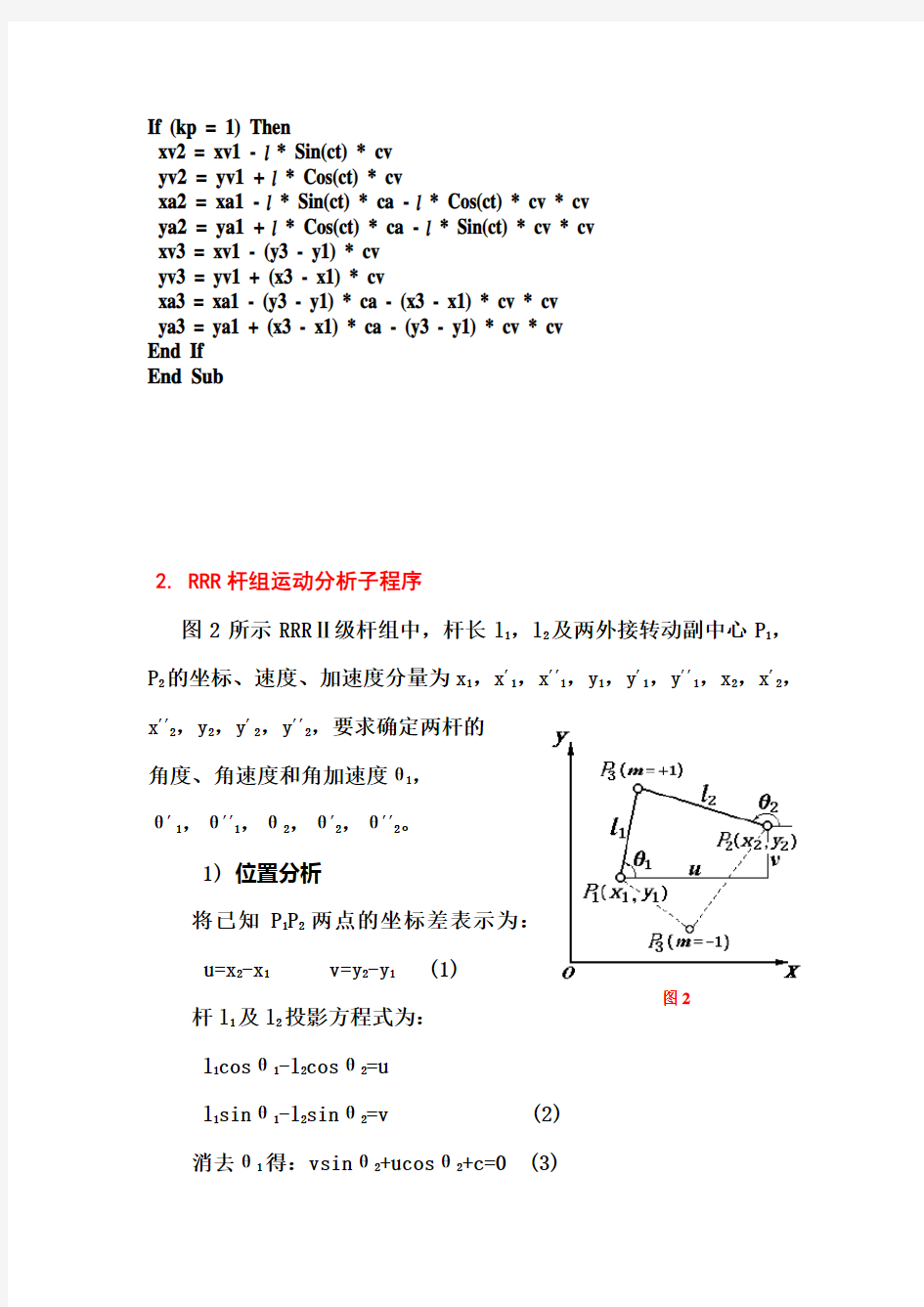
图2所示RRR Ⅱ级杆组中,杆长l 1,l 2及两外接转动副中心P 1,P 2的坐标、速度、加速度分量为x 1,x ’ 1,x ’’1,y 1,y ’ 1,y ’’1,x 2,x ’ 2,x ’’2,y 2,y ’ 2,y ’’2,要求确定两杆的 角度、角速度和角加速度θ1, θ’ 1,θ
’’
1
,θ2,θ’2,θ’’2。
1) 位置分析
将已知P 1P 2两点的坐标差表示为:
u=x 2-x 1 v=y 2-y 1 (1) 杆l 1及l 2投影方程式为: l 1cos θ1-l 2cos θ2=u
l 1sin θ1-l 2sin θ2=v (2) 消去θ1得:vsin θ2+ucos θ2
+c=0 (3)
图2
其中:c=(u2+v2+l22-l12)/2l2
解式(3)可得:
tan(θ2/2)=(v±2
2
2c
+)/(u-c) (4)
v-
u
式中+号和-号分别对应图2中m=+1和m=-1两位置。Array
由式(2)可得:
tanθ1=(v+l2sinθ2)/(u+l2cosθ2) (5)
2) 速度分析
对式(2)求导一次得:
A1θ’1+A3θ’2=u’,A2θ’1+A4θ’2=v’ (6)
其中:A1=-l1sinθ1,A2=l1cosθ1,A3=l3sinθ2,A4=-l2cosθ2解式(6)可得:
ω1=θ’1=(A4u’-A3v’)/D,ω2=θ’2=(A1v’-A2u’)/D (7)
其中:D=A1A4-A2A3=l1l2sin(θ1-θ2)
3) 加速度分析
对式(6)求导一次得:
A1θ’’1+A3θ’’2=E,A2θ’’1+A4θ’’2=F (8)
其中:E=u’’+A2θ’12+A4θ’22,F=v’’-A1θ’12-A3θ’22
解式(8)可得:
α1=θ’’1=(A4E-A3F)/D,α2=θ’’2=(A1F-A2E)/D (9)
由上述式子可设计出RRR杆组运动分析子程序(见程序单)。
''RRR杆组运动分析子程序
Public Sub RRR()
u = x2 - x1
v = y2 - y1
u1 = xv2 - xv1
v1 = yv2 - yv1
u2 = xa2 - xa1
v2 = ya2 - ya1
c = (u * u + v * v + l 2 * l 2 –l 1 * l 1) / 2 / l 2
k = v * v + u * u - c * c
If (k < 0) Then
MsgBox "DYDA CAN'T BE ASSEMBLED", vbExclamation, "机械原理"
Else
n7 = v + m * Sqr(k)
d7 = u - c
ct2 = 2 * Atn(n7 / d7)
If (d7 < 0 And n7 > 0) Then
ct2 = ct2 + 2 * PI
Else
If (d7 < 0 And n7 < 0) Then
ct2 = ct2 - 2 * PI
Else
n = v + l 2 * Sin(ct2)
d = u + l 2 * Cos(ct2)
ct1 = Atn(n / d)
End If
End If
If (d < 0 And n > 0) Then
ct1 = ct1 + PI
Else
If (d < 0 And n < 0) Then
c1 = ct1 - PI
End If
End If
If (kp = 1) Then
a1 = -l 1 * Sin(ct1)
a2 = l 1 * Cos(ct1)
a3 = l 2 * Sin(ct2)
a4 = -l 2 * Cos(ct2)
d = a1 * a4 - a2 * a3
If (Abs(d) < 0.000000001) Then
MsgBox "DYDA IS IN UNCERTAINTY", vbExclamation, "机械原理"
Else
cv1 = (a4 * u1 - a3 * v1) / d
cv2 = (a1 * v1 - a2 * u1) / d
e = u2 + a2 * cv1 * cv1 + a4 * cv2 * cv2
f = v2 - a1 * cv1 * cv1 - a3 * cv2 * cv2
ca1 = (a4 * e - a3 * f) / d
ca2 = (a1 * f - a2 * e) / d
End If
End If
End If
End Sub
3. RRP 杆组运动分析子程序
图3所示RRP Ⅱ级杆组中,已知杆长l 1及两外接点P 1,P 2的运动和移动副轴线P 2P 3的方向角变量(θ2,θ’2,θ’’2), P 2点为以移动副与构件2相连的构件上运动已知的 牵连点,要求确定运动变量l 2,θ1, l ’2,θ’1,l ’’2,θ’’
1
。
1) 位置分析
由于θ2已知,l 2待求,将式(2)消去 θ1可得:
l 22+2(ucos θ2+vsin θ2)l 2+(u 2+v 2-l 12)=0 由此解得:
l 2=-(ucos θ2+vsin θ2)±
2
222
1)
cos v sin u (l θ-θ- (10)
式中+号用于转动副中心P 3处在P 2H 线段之外(图3中m=+1的位置),-号用于P 3处在P 2H 线段之内(图3中m=-1的位置)。
θ1由式(5)而定。
2) 速度分析
对式(2)求导一次得:
图3
A1θ’1+A5l’2=G,A2θ’1+A6l’2 =H (11) 其中:A1,A2同前,A5=-cosθ2,A6=-sinθ2,
G=u’+l2A6θ’2,H=v’-l2A5θ’2
解式(11)可得:
ω1=θ’1=(A6G-A5H)/D8,l’2=(A1H-A2G)/D8 (12)
其中:D8=A1A6-A2A5=l1cos(θ1-θ2)
3)加速度分析
对式(11)求导一次得:
A1θ’’1+A5 l’’2=E1,A2θ’’1+A6 l’’2=F1(13)
其中:E1=u’’+A2θ’12+2A6l’2θ’2+l2A5θ’22+l2A6θ’’2
F1=v’’-A1θ’12-2A5l’2θ’2+l2A6θ’22-l2A5θ’’2
解式(13)可得:
α1=θ’’1=(A6E1-A5F1)/D8,l’’2=(A1F1-A2E1)/D8 (14) 由上述式子可设计出RRP杆组运动分析子程序(见程序单)。
''RRP杆组运动分析子程序
Public Sub RRP()
u = x2 - x1
v = y2 - y1
u1 = xv2 - xv1
v1 = yv2 - yv1
u2 = xa2 - xa1
v2 = ya2 - ya1
k1 = l 1 * l 1 - (u * Sin(ct2) - v * Cos(ct2)) ^ 2
If (k1 < 0) Then
MsgBox "DYDA CAN'T BE ASSEMBLED", vbExclamation, "机械原理"
Else
k2 = u * Cos(ct2) + v * Sin(ct2)
l 2 = -k2 + m * Sqr(k1)
n = v + l 2 * Sin(ct2)
d = u + l 2 * Cos(ct2)
ct1 = Atn(n / d)
If (d < 0 And n > 0) Then
ct1 = ct1 + PI
Else
If (d < 0 And n < 0) Then
ct1 = ct1 - PI
End If
End If
If (kp = 1) Then
a1 = -l 1 * Sin(ct1)
a2 = l 1 * Cos(ct1)
a5 = -Cos(ct2)
a6 = -Sin(ct2)
g = u1 + l 2 * a6 * cv2
h = v1 – l 2 * a5 * cv2
d8 = a1 * a6 - a2 * a5
If (Abs(d8) <= 0.000000001) Then
MsgBox "DYDA IS IN UNCERTAINTY", vbExclamation, "机械原理"
Else
cv1 = (a6 * g - a5 * h) / d8
l v2 = (a1 * h - a2 * g) / d8
e1 = u2 + a2 * cv1 * cv1 + 2 * a6 * l v2 * cv2 + l 2 * a5 * cv2 * cv2 + l 2 * a6 * ca2
f1 = v2 - a1 * cv1 * cv1 - 2 * a5 * l v2 * cv2 + l 2 * a6 * cv2 * cv2 –l 2 * a5 * ca2
ca1 = (a6 * e1 - a5 * f1) / d8
l a2 = (a1 * f1 - a2 * e1) / d8
End If
End If
End If
End Sub
4. RPR 杆组运动分析子程序
图4所示RPR Ⅱ级杆组中,已知杆长l 1及两外接点P 1,P 2的运动,l 1为P 1点至导路的垂直距离, P 2为过P 2'与导路垂直延伸点,延伸距离为w (当P 2与P 1在导路同侧时,w 取正,在异侧时,w 取负),要求确定运动变量l 2,θ1,θ2,l ’2,θ’1,θ’2,l ’’2,θ’’1,θ’’2。 1) 位置分析 θ1与θ2的关系为:
θ2=θ1±π/2 (15) 式中+号和-号分别对应图4中m=+1 和m=-1两位置。 l 1与l 2有如下关系: 2
12
2
2
)
w l (v u l --+=
(16)
由式(4)和式(16)可得:
tan(θ2/2)=[v ±(l 1-w)]/(u-l 2) (17)
2) 速度分析
由于θ’1=θ’2,引进符号θ’i (i=1,2),对式(2)求导一次得:
A 7θ’i +A 5l ’2=u ’,A 8θ’i +A 6l ’2=v ’ (18) 其中:A 7=-(l 1-w)sin θ1+l 2sin θ2
图4
A8= (l1-w)cosθ1-l2cosθ 2
解式(18)可得:
ωi=θi=(A6u’-A5v’)/(-l2),l’2=(A7v’ -A8u’)/(-12) (19)
3)加速度分析
对式(18)求导一次得:
A7θ’’i+A5l’’2=E2,A8θ’’i+A6l’’2=F2(20)
其中:E2=u’’+A8θ’i2+2A6l’2θ’i,F2=v’’-A7θ’i2-2A5l’2θ’i
解式(20)可得:
αi=θ’’i=(A6E2-A5F2)/(-l2),l’’2=(A7F2-A8E2)/(-l2) (21)
由上述式子可设计出 RPR杆组运动分析子程序(见程序单),在子程序中,以+m代替前面各式中出现的±计算符。 m称之为型参数,在设计主程序时,应根据各类Ⅱ级杆组不同的布置型式,确定m的取值(m可取+1,-1和0)。
''RPR杆组运动分析子程序
Public Sub RPR()
u = x2 - x1
v = y2 - y1
u1 = xv2 - xv1
v1 = yv2 - yv1
u2 = xa2 - xa1
v2 = ya2 - ya1
i1 = u * u + v * v - (l 1 - w) * (l 1 - w)
If (i1 < 0) Then
MsgBox "DA Y A CAN'T BE ASSEMBLEND", vbExclamation, "机械原理"
Else
l2 = Sqr(i1)
n = v + m * (l 1 - w)
d = u - l2
ct2 = 2 * Atn(n / d)
If (d < 0 And n > 0) Then
ct2 = ct2 + 2 * PI
Else
If (d < 0 And n < 0) Then
ct2 = ct2 - 2 * PI
End If
End If
ct1 = ct2 – m * PI / 2
If (kp = 1) Then
a5 = -Cos(ct2)
a6 = -Sin(ct2)
a7 = -(l 1 - w) * Sin(ct1) + l 2 * Sin(ct2)
a8 = (l 1 - w) * Cos(ct1) – l 2 * Cos(ct2)
If (Abs(l 2) < 0.000000001) Then
MsgBox "DYDA IS IN UNCERTAINTY", vbExclamation, "机械原理"
Else
cv1 = (a6 * u1 - a5 * v1) / (-l 2)
cv2 = cv1
l v2 = (a7 * v1 - a8 * u1) / (-l 2)
e2 = u2 + a8 * cv1 * cv1 + 2 * a6 * l v2 * cv1
f2 = v2 - a7 * cv1 * cv1 - 2 * a5 * l v2 * cv1
ca1 = (a6 * e2 - a5 * f2) / (-l 2)
ca2 = ca1
l a2 = (a7 * f2 - a8 * e2) / (-l 2)
End If
End If
End If
End Sub
5.PRP 杆组运动分析子程序 图5所示PRP Ⅱ级杆组中,已知 导路1,2两外接点P 1,P 2的运动, h 1,h 2分别为未知运动点P 3至导路 1,2的垂直距离,导路1,2的方位 角、角速度、角加速度(θ1,θ’1, θ’’1,θ2,θ’2,θ’’2)均已知,要求 确定导路1,2移动的位移、速度及
加速度(l 1,l 2,l ’1,l ’2,l ’’1,l ’’2)以及P 3点的运动(x 3,x ’3,x ’’3,y 3,y ’3,y ’’3)。
1) 位置分析
推导l 1,及l 2的方程式:
x 1+l 1cos θ1+h 1sin θ 1 = x 2+l 2cos θ2-h 2sin θ2 y 1+l 1sin θ1-h 1cos θ 1 = y 2+l 2sin θ2+h 2cos θ2 整理得:
l 1cos θ 1 - l 2cos θ 2 = E 1
l 1sin θ 1 - l 2sin θ 2 = F 1 (22)
其中:E 1=u- A 3h 1-A 4l 2,F 1=v+A 1h 1+A 2h 2,
A 1=cos θ1,A 2=cos θ2,A 3=sin θ1,A 4=sin θ2 。 由于θ 1 ,θ2均已知,由此解得: l 1 =(F 1 cos θ 2 - E 1sin θ2) / D 8
图5
l2 =(F1 cosθ 1 - E1sinθ1) / D8 (23)
其中:D8 = A2A3 - A1A4 = sin(θ1-θ2)
P3点的位置为:
x3 = x1 + l1cosθ 1 + h1sinθ1
y3 = y1 + l1sinθ 1 - h1cosθ 1 (24)
2)速度分析
对式(22)求导一次,整理得:
l’1cosθ 1 - l’2cosθ 2 = E2 l’1sinθ 1 - l’2sinθ 2 = F2 (25)
其中:
E2 =u’ + A6θ’1 – A8θ’2 ,F2 = v’ - A5θ’1 – A7θ’2 ,
A5 = l1cosθ 1 + h1sinθ 1 ,A6 = l1sinθ 1 - h1cosθ 1 ,
A7 = l2cosθ 2 - h2sinθ 2 ,A8 = l2sinθ2+ h2cosθ 2 。
由(25)解得:
l’1=(F2 cosθ 2 - E2sinθ2) / D8
l’2=(F2 cosθ 1 - E2sinθ1) / D8 (26) P3点的速度为对式(24)求导得:
x’3 = x’1 + l’1cosθ 1 + A6θ’1
y’3 = y’1 + l’1sinθ 1 - A5θ’1 (27)
3)加速度分析
对式(25)求导一次,整理得:
l’’1cosθ 1 - l’’2cosθ 2 = E3
l’’1sinθ 1 - l’’2sinθ 2 = F3 (28) 其中:
E3 = u’’ + 2A3l’1θ’1 + A5θ’12+ A6θ’’1–2A4l’2θ’2–A7θ’22– A8θ’’2 ,F3 = v’’ - 2A1l’1θ’1 + A6θ’12- A5θ’’1 +2A2l’2θ’2–A8θ’22+ A7θ’’2 。
解(28)式得:
l’’1=(F3 cosθ 2 – E3sinθ2) / D8
l’’2=(F3 cosθ 1 – E3sinθ1) / D8 (29) P3点的加速度为对式(27)求导得:
x’’3 = x’’1 + A1l’’1 - 2A3l’1θ’1 - A5θ’12- A6θ’’1
y’’3 = y’’1 + A3l’’1 - 2A1l’1θ’1 - A6θ’12- A5θ’’1 (30)
由上述式子可设计出 PRP杆组运动分析子程序(见程序单)。
''PRP杆组运动分析子程序
Public Sub PRP()
u = x2 - x1
v = y2 - y1
u1 = xv2 - xv1
v1 = yv2 - yv1
u2 = xa2 - xa1
v2 = ya2 - ya1
a1 = Cos(ct1) : a2 = Cos(ct2) : a3 = Sin(ct1) : a4 = Sin(ct2)
d8 = a2 * a3 - a1 * a4
If (Abs(d8) < 0.000000001) Then
MsgBox "DA YD IS IN UNCERTAINTY", vbExclamation, "机械原理"
Else
e1 = u - a3 * h1 - a4 * h2
f1 = v + a1 * h1 + a2 * h2
l 1 = (a2 * f1 - a4 * e1) / d8
l 2 = (a1 * f1 - a3 * e1) / d8
x3 = x1 + a1 * l 1 + a3 * h1
y3 = y1 + a3 * l 1 - a1 * h1
If (kp = 1) Then
a5 = a1 * l 1 + a3 * h1
a6 = a3 * l 1 - a1 * h1
a7 = a2 * l 2 - a4 * h2
a8 = a4 * l 2 + a2 * h2
e2 = u1 + a6 * cv1 - a8 * cv2
f2 = v1 - a5 * cv1 + a7 * cv2
l v1 = (a2 * f2 - a4 * e2) / d8
l v2 = (a1 * f2 - a3 * e2) / d8
xv3 = xv1 + a1 * l v1 - a6 * cv1
yv3 = yv1 + a3 * l v1 + a5 * cv1
e = u2 + 2 * a3 * l v1 * cv1 + a5 * cv1 * cv1 + a6 * ca1
e3 = e - 2 * a4 * l v2 * cv2 - a7 * cv2 * cv2 - a8 * ca2
f = v2 - 2 * a1 * l v1 * cv1 + a6 * cv1 * cv1 - a5 * ca1
f3 = f + 2 * a2 * l v2 * cv2 - a8 * cv2 * cv2 + a7 * ca2
l a1 = (a2 * f3 - a4 * e3) / d8
l a2 = (a1 * f3 - a3 * e3) / d8
xa3 = xa1 + a1 * l a1 - 2 * a3 * l v1 * cv1 - a5 * cv1 * cv1 - a6 * ca1
ya3 = ya1 + a3 * l a1 + 2 * a1 * l v1 * cv1 - a6 * cv1 * cv1 + a5 * ca1
End If
End If
End Sub
层次分析法建模 层次分析法(AHP-Analytic Hierachy process)---- 多目标决策方法 70 年代由美国运筹学家T·L·Satty提出的,是一种定性与定量分析相结合的多目标决策分析方法论。吸收利用行为科学的特点,是将决策者的经验判断给予量化,对目标(因素)结构复杂而且缺乏必要的数据情况下,採用此方法较为实用,是一种系统科学中,常用的一种系统分析方法,因而成为系统分析的数学工具之一。 传统的常用的研究自然科学和社会科学的方法有: 机理分析方法:利用经典的数学工具分析观察的因果关系; 统计分析方法:利用大量观测数据寻求统计规律,用随机数学方法描述(自然现象、 社会现象)现象的规律。 基本内容:(1)多目标决策问题举例AHP建模方法 (2)AHP建模方法基本步骤 (3)AHP建模方法基本算法 (3)AHP建模方法理论算法应用的若干问题。 参考书: 1、姜启源,数学模型(第二版,第9章;第三版,第8章),高等教育出版社 2、程理民等,运筹学模型与方法教程,(第10章),清华大学出版社 3、《运筹学》编写组,运筹学(修订版),第11章,第7节,清华大学出版社 一、问题举例: A.大学毕业生就业选择问题 获得大学毕业学位的毕业生,“双向选择”时,用人单位与毕业生都有各自的选择标准和要求。就毕业生来说选择单位的标准和要求是多方面的,例如: ①能发挥自己的才干为国家作出较好贡献(即工作岗位适合发挥专长); ②工作收入较好(待遇好); ③生活环境好(大城市、气候等工作条件等); ④单位名声好(声誉-Reputation); ⑤工作环境好(人际关系和谐等) ⑥发展晋升(promote, promotion)机会多(如新单位或单位发展有后劲)等。 问题:现在有多个用人单位可供他选择,因此,他面临多种选择和决策,问题是他将如何作出决策和选择?——或者说他将用什么方法将可供选择的工作单位排序?
摘要 在工程技术领域,经常会遇到一些需要反复操作,重复性很高的工作,如果能有一个供反复操作且操作简单的专用工具,图形用户界面就是最好的选择。如在本设计中对于牛头刨床平面六杆机构来说,为了保证结构参数与运动参数不同的牛头刨床的运动特性,即刨刀在切削过程中接近于等速运动从而保证加工质量和延长刀具寿命,以及刀具的急回性能从而提高生产率,这样的问题如果能够通过设计一个模型平台,之后只需改变参量就可以解决预期的问题,这将大大的提高设计效率。本设计中正是通过建立牛头刨床六杆机构的数学模型,然后用MA TLAB程序设计出一个友好的人机交互的图形界面,并将数学模型参数化,使用户只需改变牛头刨床的参数就可以方便的实现运动分析和运动仿真,用户可以形象直观地观察到牛头刨床的运动轨迹、速度变化及加速度变化规律。 关键词:牛头刨床六杆机构MA TLAB 运动仿真程序开发
Abstract In the engineering area, often repeatedly encountered some operational needs, repetitive highly, and if the operation can be repeated for a simple operation and dedicated tool graphical user interface is the best choice. As in the planer graphic design for six pole bodies, and campaigns to ensure the structural parameters of different parameters planer movement characteristics, planning tool in the process of cutting close to equal campaign to ensure processing quality and extended life cutlery and cutlery rush back to the performance enhancing productivity, If such issues can be adopted to design a model platform parameter can be changed only after the expected settlement, which will greatly enhance the efficiency of the design. It is through the establishment of this design planer six pole bodies mathematical model, and then use MATLAB to devise procedures of a friendly aircraft in the world graphics interface, and mathematical models of the parameters, so that users only need to change the parameters planer can facilitate the realization of movement analysis and sports simulation, Users can visual image observed in planer movement trajectories, speed changes and acceleration changes. Keywords:Planer 6 pole bodies MATLAB Campaign simulation Procedure development.
1.速度瞬心是两刚体上瞬时速度相等的重合点。 2.若瞬心的绝对速度为零,则该瞬心称为绝对瞬心; 若瞬心的绝对速度不为零,则该瞬心称为相对瞬心。 3.当两个构件组成移动副时,其瞬心位于垂直于导路方向的无穷远处。当两构件组成高副时,两个高副元素作纯滚动,则其瞬心就在接触点处;若两个高副元素间有相对滑动时,则其瞬心在过接触点两高副元素的公法线上。 4.当求机构的不互相直接联接各构件间的瞬心时,可应用三心定理来求。 5.3个彼此作平面平行运动的构件间共有 3 个速度瞬心,这几个瞬心必定位于一条直线上。 6.机构瞬心的数目K与机构的构件数N的关系是K=N(N-1)/2 。 7.铰链四杆机构共有 6 个速度瞬心,其中 3 个是绝对瞬心。 8.速度比例尺μ ν 表示图上每单位长度所代表的速度大小,单位为: (m/s)/mm 。 加速度比例尺μa表示图上每单位长度所代表的加速度大小,单位为 (m/s2)/mm。 9.速度影像的相似原理只能应用于构件,而不能应用于整个机构。 10.在摆动导杆机构中,当导杆和滑块的相对运动为平动,牵连运动为转动时(以上两空格填转动或平动),两构件的重合点之间将有哥氏加速度。哥氏加速度的大小为2×相对速度×牵连角速度;方向为相对速度沿牵连角速度的方向转过90°之后的方向。 二、试求出图示各机构在图示位置时全部瞬心的位置(用符号 ij P直接标注在图上)。 P 24)
12 三、 在图a 所示的四杆机构中, l AB =60mm,l CD =90mm ,l AD =l BC =120mm ,ω2=10rad/s ,试用瞬心法求: 1)当φ=165°时,点C 的速度v C ; 2)当φ=165°时,构件3的BC 线上速度最小的一点E 的位置及速度的大小; 3)当v C =0时,φ角之值(有两个解); 解:1)以选定的比例尺μl 作机构运动简图(图b )。 2)求v C ,定出瞬心P 13的位置(图b ) a ) (P 13) P P 23→∞
disp('请输入判断矩阵A(n阶)'); A=input('A='); [n,n]=size(A); x=ones(n,100); y=ones(n,100); m=zeros(1,100); m(1)=max(x(:,1)); y(:,1)=x(:,1); x(:,2)=A*y(:,1); m(2)=max(x(:,2)); y(:,2)=x(:,2)/m(2); p=0.0001;i=2;k=abs(m(2)-m(1)); while k>p i=i+1; x(:,i)=A*y(:,i-1); m(i)=max(x(:,i)); y(:,i)=x(:,i)/m(i); k=abs(m(i)-m(i-1)); end a=sum(y(:,i)); w=y(:,i)/a; t=m(i); disp(w);disp(t); %以下是一致性检验 CI=(t-n)/(n-1);RI=[0 0 0.52 0.89 1.12 1.26 1.36 1.41 1.46 1.49 1.52 1.54 1.56
1.58 1.59]; CR=CI/RI(n); if CR<0.10 disp('此矩阵的一致性可以接受!'); disp('CI=');disp(CI); disp('CR=');disp(CR); end function AHPInit1(x,y) %层次分析的初始化 %默认只有两层x为准则数,y为方案数 %CToT为准则对目标生成的比较阵 %EigOfCri为准则层的特征向量 %EigOfOpt为选项层的特征向量 EigOfCri=zeros(x,1);%准则层的特征向量 EigOfOpt=zeros(y,x); dim=x;%维度 RI=[0 0 0.58 0.90 1.12 1.24 1.32 1.41 1.45 1.49 1.51];%RI标准%生成成对比较阵 for i=1:dim CToT(i,:)=input('请输入数据:'); end CToT %输出 pause, tempmatrix=zeros(x+1);
机械原理课程设计 六杆机构运动分析 学院:工程机械 专业:机械设计制造及其自动化 班级:25041004 设计者:王东升于新宇 2013年 1月8日一、分析题目
如图1所示六杆机构,对其进行运动和动力分析。已知数据如表1所示。 r1=r3=L2=110mm ,L4=600mm ,L AD=39mm ,n1=40r/min ,L CS4=220mm. 图1 六杆机构 二、分析内容 (1)进行机构的结构分析; 如2图所示,建立直角坐标系。机构中活动构件为1、2、3、4、5,即活动构件数n=5。A、C、B、D、E处运动副为低副(6个转动副,1个移动副),共7个,即P l=7。则机构的自由度为:F=3n-2P l=3Χ5-2Χ7=1。 图2(a)图2(b) 图2(c) 如图2,拆出基本杆组,(a)为原动件,(b)、(c)为二级杆组,该机构是由机架0、原动件1和2个Ⅱ级杆组组成,故该机构是Ⅱ级机构。 (2)绘制滑块E的运行线图;
利用JYCAE软件求解。 1、将题设所给的原始数据(机构的活动构件数、转动副数、移动副数、己知长度值总数 和机构的自由度)分别输入JYCAE软件中,如图3: 图3—1
图3—2 图3—3
图3—4 2、机构的运动分析 输入完所有的原始数据以后,开始运动分析。求E点的运动线图,要选取基本单元5,但是利用基本单元5的条件是已知C点的运动状态,所以先利用基本单元1、2求得C点的运动状态,然后求的E点运动线图。如图4。 图4—1 解得B点运动参数
图4—2 解得C点运动参数 图4—3 解得E点运动参数共选取3个基本单元,如图4—4,然后运算。
平面四杆机构的运动仿真模型分析 1前言 平面四杆机构是是平面连杆机构的基础,它虽然结构简单,但其承载能力大,而且同样能够实现多种运动轨迹曲线和运动规律,因而在工程实践中得到广泛应用。 平面四杆机构的运动分析, 就是对机构上某点的位移、轨迹、速度、加速度进行分析, 根据原动件的运动规律, 求解出从动件的运动规律。平面四杆机构的运动设计方法有很多,传统的有图解法、解析法和实验法。随着计算机技术的飞速发展,机构设计及运动分析已逐渐脱离传统方法,取而代之的是计算机仿真技术。本文在UG NX5环境下对平面四杆机构进行草图建模,通过草图中的尺寸约束、几何约束及动画尺寸等功能确定各连杆的尺寸,之后建立相应的连杆、运动副及运动驱动,对建立的运动模型进行运动学分析,给出构件上某点的运动轨迹及其速度和加速度变化规律曲线,文章最后简要分析几个应用于工程的平面四杆机构实例。 2平面四杆机构的建模 2.1问题的提出 平面四杆机构因其承载能力大,可以满足或近似满足很多的运动规律,所以其应用非常广泛,本文以基于曲柄摇杆机构的物料传送机构为例,讨论其建模及运动分析。 如图1所示,ABCD为曲柄摇杆机构,曲柄AB为主动件,机构在运动中要求连杆BC的延伸线上E点保持近似直线运动,其中直线轨迹为工作行程,圆弧轨迹为回程或空程,从而实现物料传送的功能。
2.2平面四杆机构的建模 由于物料传送机构为曲柄摇杆机构,所以它符合曲柄存在条件。根据机械原理课程中的应用实例[1],选取AB=100,BC=CD=CE=250,AD=200,单位均为毫米。 在UG NX5的Sketch环境里,创建如图2所示的草图,并作相应的尺寸约束和几何约束,其中EE'为通过E点的水平轨迹参考线,用以检验E点的工作行程运动轨迹。现通过草图里的尺寸动画功能,令AB与AD的夹角从0°到360°变化,可看到E点的变化轨迹为直线和圆弧,如图3所示为尺寸动画的四个截图,其中图3(a)中的E点为水平轨迹的起点,图3(b)中的E点为水平轨迹的中点,图3(c)中的E点为水平轨迹的终点,而图3(d)中的E点为圆弧轨迹(图中未画出)即回程的中点。 如E点轨迹不符合设计要求,则可适当调整各杆件的尺寸,再通过尺寸动画功能检验。
%% AHP weight calculation %%data input clc clear all A =[1 3 5 7 9 5;1/3 1 3 9 3 3;1/5 1/3 1 3 3 1/3;1/7 1/9 1/3 1 5 1/3;1/9 1/3 1/3 1/5 1 1/3;1/5 1/3 1 3 3 1]; %%Consistency calculation and weight vector calculation [n,n] = size(A); [v,d] = eig(A); r = d(1,1); CI = (r-n)/(n-1); RI = [0 0 0.58 0.90 1.12 1.24 1.32 1.41 1.45 1.49 1.52 1.54 1.56 1.58 1.59]; CR = CI/RI(n); if CR<0.10 CR_Result = 'pass'; else CR_Result = 'no pass'; end % % Weight vector calculation w = v(:,1)/sum(v(:,1));
w = w'; % % output disp('The judgment matrix weight vector calculation report:'); disp('coincidence indicator:');disp(num2str(CI)); disp('Consistency ratio:');disp(num2str(CR)); disp(' Consistency test results:');disp(CR_Result); disp('eigenvalue:');disp(num2str(r)); disp('weight vector:');disp(num2str(w));
平面六杆机构运动分析 2111306008 王健 1、 曲柄摇杆串RRP 型II 级杆组平面六杆机构数学模型 如图1所示,当曲柄1做匀速转动时,滑块5做往复移动,该机构的行程速比系数大于1,有急回特性,且传动角较大。设曲柄1的角速度为ω,并在铰链C 建立坐标oxy 。由图可知,该机构由构件1、2、3、6组成的曲柄导杆机构和构件3、4、5、6组成的摆动滑块机构组成。机构中错误!未找到引用源。 (i=1,2,3,4)分别表示曲柄l 、机架2、导杆3、连杆4的长度及滑块5的行程用5s 表示。曲柄转动中心A 的坐标(y x H H ,)。 图1 六杆机构运动简图 对构件1、2、3、6组成的曲柄导杆机构进行运动分析。曲柄1转动角度 ?、连杆2转动角度 错误!未找到引用源。 及摇杆3转动角度错误!未找到引用源。都是以X 轴正方向为起始边的度量角度,单位为rad 。并设机构初始位置为曲柄1转角 0=?的位置。该机构的位置方程为: ?θδππi i i i x i y e L e L e L e H e H 1232/+=++ (1) 式(1)中x 、y 轴的分量等式为:
{ θ?δθ?δcos cos cos cos sin sin 213213L L L H L L L H x y +=+-+=+ (2) 当 错误!未找到引用源。 在 3600-作匀速变化时,就可以求出对应的连杆2的转角 错误!未找到引用源。 以及摇杆3的转角δ的值。将式消去 错误!未找到引用 源。 ,得到: ()()22213213cos cos sin sin L L H L L H L x y =--+-+?δ?δ (3) 将(3)式分解,并分别定义: ()212122231cos )sin (??L H L H L L A x y ++-+-= )sin (2131?L H L B y -= )cos (2131?L H L C x += 摇杆3的角位移 ()]/)tan[(2112121211C A C A B B a --+-+=δ (4) 由(2)式可得连杆 2 的角位移 ]/)sin sin arcsin[(213L L L H y ?δθ-+= (5) 假设曲柄作匀角速度dt d /φω=是常数,对式2求时间导数,得到连杆2的角速度2ω以及摇杆3角速度3ω,方程式如下: ( )()][sin cos sin cos sin cos 11233322?ω?ωωωδδθθL L L L L L =-- (6) 对式(6)求时间导数, 得到连杆 2 的角加速度及摇杆 3 的角加速度2a ,方程式 如下: ()()] [cos cos cos sin sin sin sin cos sin cos 3232221232322212233322δωθ?ωδωθ?ωδ δθθL L w L L L w L a a L L L L -+-----= (7) 再对构件3、4、5、6 组成的摆动滑块机构进行运动分析。首先建立机构位置方程,方程如下: 2/3543πφδi i i e S e L e L += (8) 式中5S 为滑块的行程。 按同样的方法可分别得到滑块 5 的位置、速度、加速度方程。连杆4和滑块5的位置方程为:
机械原理大作业(一)平面六杆机构的运动分析 班级: 学号: 姓名: 同组者: 完成时间:
一.题目 1.1 说明 如图所示为一片面六杆机构各构件尺寸如表格1所示,又知原动件1以等角速度ω=1rad/s沿逆时针方向回转,试求各从动件的角位移、角加速度以及E点的位移、速度及加速度的变化情况。1.2 数据 组号L1L2L’2L3L4L5L6 x G y G 1-A 26.5 105.6 65.0 67.5 87.5 34.4 25.0 600 153.5 41.7 表格1 条件数据 1.3 要求 三人一组,编程计算出原动件从0~360o时(计算点数N=36)所要求各运动变量的大小,并绘制运动线图及点的轨迹曲线。
二.解题步骤 由封闭图形ABCD可得: 由封闭图形AGFECD可得 于是有: 112233 1122433 sin sin sin1 cos cos sin2 l l l l l l l θθθ θθθ +=-------- +=+----- / 1122225566 / 1122225566 cos cos sin cos cos153.53 sin sin cos sin sin41.74 l l l l l l l l l l θθθθθ θθθθθ +++=+---- +-+=+----- 对以上1到4导可得- 222333111 222333111 / 55566611122222 / 55566611122222 cos cos cos sin sin sin sin sin sin(sin cos) cos cos cos(cos sin) l l l l l l l l l l l l l l l l θωθωθω θωθωθω θωθωθωωθθ θωθωθωωθθ-+= -=- -=--- -=--+
基于Matlab的层次分析法及其运用浅析 本文通过使用Matlab软件进行编程,在满足同一层次中各指标对所有的下级指标均产生影响的假定条件下,实现了层次分析法的分析运算。本程序允许用户自由设定指标层次结构内的层次数以及各层次内的指标数,通过程序的循环,用户只需输入判断矩阵的部分数据,程序可依据层次分析法的计算流程进行计算并作出判断。本程序可以方便地处理层次分析法下较大的运算量,解决层次分析法的效率问题,提高计算机辅助决策的时效性。 标签:Matlab层次分析法判断矩阵决策 在当前信息化、全球化的大背景下,传统的手工计算已不能满足人们高效率、高准确度的决策需求。因此计算机辅助决策当仁不让地成为了管理决策的新工具、新方法。基于此,本文在充分发挥计算机强大运算功能的基础上,选用美国MathWorks公司的集成数学建模環境Matlab R2009a作为开发平台,使用M语言进行编程,对计算机辅助决策在层次分析法中的运用进行讨论。试图通过程序实现层次分析法在计算机系统上的运用,为管理决策探索出新的道路。 1 层次分析法的计算流程 根据层次分析法的相关理论,层次分析法的基本思想是将复杂的决策问题进行分解,得到若干个下层指标,再对下层指标进行分解,得到若干个再下层指标,如此建立层次结构模型,然后根据结构模型构造判断矩阵,进行单排序,最后,求出各指标对应的权重系数,进行层次总排序。 1.1 构造层次结构模型在进行层次分析法的分析时,最主要的步骤是建立指标的层次结构模型,根据结构模型构造判断矩阵,只有判断矩阵通过了一致性检验后,方可进行分析和计算。其中,结构模型可以设计成三个层次,最高层为目标层,是决策的目的和要解决的问题,中间层为决策需考虑的因素,是决策的准则,最低层则是决策时的备选方案。一般来讲,准则层中各个指标的下级指标数没有限制,但在本文中设计的程序尚且只能在各指标具有相同数量的下级指标的假定下,完成层次分析法的分析,故本文后文选取的案例也满足这一假定。 1.2 建立判断矩阵判断矩阵是表示本层所有因素针对上一层某一个因素的相对重要性的比较给判断矩阵的要素赋值时,常采用九级标度法(即用数字1到9及其倒数表示指标间的相对重要程度),具体标度方法如表1所示。 1.3 检验判断矩阵的一致性由于多阶判断的复杂性,往往使得判断矩阵中某些数值具有前后矛盾的可能性,即各判断矩阵并不能保证完全协调一致。当判断矩阵不能保证具有完全一致性时,相应判断矩阵的特征根也将发生变化,于是就可以用判断矩阵特征根的变化来检验判断的一致性程度。在层次分析法中,令判断矩阵最大的特征值为λmax,阶数为n,则判断矩阵的一致性检验的指标记为:
A=[1 3/2 3/7 3/9 2/3 1 4/7 4/9 7/3 7/4 1 7/9 9/3 9/4 9/7 1]; [x,y]=eig(A); eigenvalue=diag(y); m=max(eigenvalue); lamda=m n=find(m==eigenvalue); y_lamda=x(:,n); s=sum(y_lamda); W2=y_lamda./s B1=[1 5/6 5/4; 6/5 1 6/4; 4/5 4/6 1]; [x1,y1]=eig(B1); eigenvalue1=diag(y1); m1=max(eigenvalue1); lamda1=m1 n1=find(m1==eigenvalue1); y1_lamda1=x1(:,n1); s1=sum(y1_lamda1); W13=y1_lamda1./s1 B2=[1 4/2 4/3; 2/4 1 2/3; 3/4 3/2 1]; [x2,y2]=eig(B2); eigenvalue2=diag(y2); m2=max(eigenvalue2); lamda2=m2 n2=find(m2==eigenvalue2); y2_lamda2=x2(:,n2); s2=sum(y2_lamda2); W23=y2_lamda2./s2 B3=[1 6/7 6/7; 7/6 1 1; 7/6 1 1]; [x3,y3]=eig(B3); eigenvalue3=diag(y3); m3=max(eigenvalue3); lamda3=m3
n3=find(m3==eigenvalue3); y3_lamda3=x3(:,n3); s3=sum(y3_lamda3); W33=y3_lamda3./s3 B4=[1 7/6 7/5; 6/7 1 6/5; 5/7 5/6 1]; [x4,y4]=eig(B4); eigenvalue4=diag(y4); m4=max(eigenvalue4); lamda4=m4 n4=find(m4==eigenvalue4); y4_lamda4=x4(:,n4); s4=sum(y4_lamda4); W43=y4_lamda4./s4 %层次总排序 W3=[W13 W23 W33 W43]; W=W3*W2 %判断矩阵的一致性 N=size(A,1); CI=(lamda-N)/(N-1); if(N==1) RI=0.00 elseif(N==2) RI=0.00 elseif(N==3) RI=0.58 elseif(N==4) N==4 RI=0.90 elseif(N==5) RI=1.12 elseif(N==6) RI=1.24 elseif(N==7) RI=1.32 elseif(N==8) RI=1.41 elseif(N==9) RI=1.45
四连杆机构运动学分析 使用ADAMS 建立如图1所示的四连杆机构,二杆长150mm ,三杆长500mm ,四杆长450mm ,二杆的转动速度为πrad/s ,二杆初始角度为90度。用Matlab 建立该系统的运动约束方程,计算结果,并与ADAMS 仿真结果进行对比。 图1 四杆机构 一、位置分析 1、由地面约束得到: {R x 1=0 R y 1=0θ1=0 2、由O 点约束得: { R x 2?l 22cos θ2=0R y 2?l 22 sin θ2=0 二杆 三杆 四杆 O 点 A 点 B 点 C 点
3、由A 点约束得: { R x 2+l 22cos θ2?R x 3+l 32cos θ3=0R y 2+l 22sin θ2?R y 3+l 32 sin θ3=0 4、由B 点约束得: { R x 3+l 32cos θ3?R x 4+l 42cos θ4=0R y 3+l 32sin θ3?R y 4+l 42 sin θ4=0 5、由C 点约束得: { R x 4+l 4cos θ4?l 5cos θ1=0R y 4+l 42 sin θ4?l 5sin θ1=0 6、由二杆驱动约束得: θ2?ω2=0 积分得: θ2?θ02?ω2t =0 由上面九个方程组成此机构的运动约束方程,用Matlab 表示为: fx=@(x)([x(1); x(2); x(3); x(4)-l2/2*cos(x(6)); x(5)-l2/2*sin(x(6)); x(4)+l2/2*cos(x(6))-x(7)+l3/2*cos(x(9)); x(5)+l2/2*sin(x(6))-x(8)+l3/2*sin(x(9)); x(7)+l3/2*cos(x(9))-x(10)+l4/2*cos(x(12)); x(8)+l3/2*sin(x(9))-x(11)+l4/2*sin(x(12)); x(10)+l4/2*cos(x(12))-x(1)-l5; x(11)+l4/2*sin(x(12))-x(2); x(6)-w*i-zhj0;]); x(1) x(2) x(3) x(4) x(5) x(6) x(7) x(8) x(9) x(10) x(11) x(12) 分别表示R x 1、R y 1、θ1、R x 2、R y 2、θ2、R x 3、R y 3、θ3、R x 4、R y 4、θ4。
§3.4 复杂系统决策模型与层次分析法 Analitic Hierachy Process (AHP) T.L.Saaty 1970’ 一种定性和定量相结合的、系统化、层次化的分析方法。 一. 问题举例 1. 在海尔、新飞、容声和雪花四个牌号的电冰箱中选购一种。要考虑品牌的信誉、冰箱的功能、价格和耗电量。 2. 在泰山、杭州和承德三处选择一个旅游点。要考虑景点的景色、居住的环境、饮食的特色、交通便利和旅游的费用。 3. 在基础研究、应用研究和数学教育中选择一个领域申报科研课题。要考虑成果的贡献(实用价值、科学意义),可行性(难度、周期和经费)和人才培养。 二. 模型和方法 1. 层次分析法的基本步骤: 步骤一:确定层次结构,将决策的目标、考虑的因素(决策准则)和决策对象按它们之间的相互关系分为最高层、中间层和最低层,绘出层次结构图。 最高层:决策的目的、要解决的问题。 最低层:决策时的备选方案。 中间层:考虑的因素、决策的准则。 对于相邻的两层,称高层为目标层,低层为因素层。 例 例2. 旅游景点 例3.
步骤二: 通过相互比较,确定下一层各因素对上一层目标的影响的权重,将定性的判断定量化,即构造因素判断矩阵。 步骤三:由矩阵的特征值确定判别的一致性;由相应的特征向量表示各因素的影响权重,计算权向量。 步骤四: 通过综合计算给出最底层(各方案)对最高层(总目标)影响的权重,权重最大的方案即为实现目标的最由选择。 2. 因素判断矩阵 比较n 个因素y=(y 1,y 2,…,y n )对目标 z 的影响. 采用两两成对比较,用a ij 表示因素 y i 与因素y j 对目标z 的影响程度之比。 通常用数字 1~ 9及其倒数作为程度比较的标度, 即九级标度法 x i /x j 相当 较重要 重要 很重要 绝对重要 a ij 1 3 5 7 9 2, 4, 6, 8 居于上述两个相邻判断之间。 当a ij > 1时,对目标 Z 来说 x i 比 x j 重要, 其数值大小表示重要的程度。 同时必有 a ji = 1/ a ij ≤1,对目标 Z 来说 x j 比 x i 不重要,其数值大小表示不重要的程度。 称矩阵 A = ( a ij )为因素判断矩阵。 因为 a ij >0 且 a ji =1/ a ij 故称A = (a ij )为正互反矩阵。 例. 选择旅游景点 Z :目标,选择景点 y :因素,决策准则 y 1 费用,y 2 景色,y 3 居住,y 4 饮食,y 5 交通 3. 一致性与权向量 如果 a ij a jk =a ik i, j, k=1,2,…,n, 则称正互反矩阵A 具有一致性. 这表明对各个因素所作的两两比较是可传递的。 一致性互正反矩阵A=( a ij )具有性质: (1) A 的每一行(列)均为任意指定行(列)的正数倍数,因此 rank(A)=1. (2) A 有特征值λ=n, 其余特征值均为零. (3) 记A 的对应特征值λ=n 的特征向量为w=(w 1 w 2 ,…, w n ) 则 a ij =w i w j -1 反之,如果在目标z 中n 个因素y=(y 1,y 2,…,y n )所占比重分别为w=(w 1 w 2 ,…, w n ), 则 ∑i w i =1, 且因素判断矩阵为 A=(w i w j -1 ) 。 于是, A 为一致性正互反矩阵当且仅当A=(w i w j -1)。 一致性正互反矩阵A 相应于特征值n 的归一化的特征向量w=(w 1 w 2 ,…, w n ), (∑i w i =1)正反映了n 个因素y=(y 1,y 2,…,y n )在目标z 中所占比重,称为因素y=(y 1,y 2,…,y n )对目标 z 的权向量 4. 一致性检验与因素排序 定理1: n 阶正互反矩阵A 是一致性的当且仅当其最大特征值为 n. 定理2: 正互反矩阵具有模最大的正实数特征值λ1, 其重数为1, 且相应特征向量为正向量. 为刻画n 阶正互反矩阵A=( a ij )与一致性接近的程度, 定义一致性指标(Consensus index) : CI=(λ1-n)/(n-1) CI = 0, A 有完全的一致性。CI 接近于 0, A 有满意的一致性 。 Saaty 又引入平均随机一致性指标RT n 1 2 3 4 5 6 7 8 9 RI 0 0 0.58 0.90 1.12 1.24 1.32 1.41 1.45 当CR = CI / RI < 0.1 时, 认为A 有满意的一致性。 ???? ??? ? ????????=11 3 3 /15 /11123/15/13/12/114/17 /133412/155721A
一、填空题: 1.速度瞬心是两刚体上瞬时速度相等的重合点。 2.若瞬心的绝对速度为零,则该瞬心称为绝对瞬心; 若瞬心的绝对速度不为零,则该瞬心称为相对瞬心。 3.当两个构件组成移动副时,其瞬心位于垂直于导路方向的无穷远处。当两构件组成高副时,两个高副元素作纯滚动,则其瞬心就在接触点处;若两个高副元素间有相对滑动时,则其瞬心在过接触点两高副元素的公法线上。 4.当求机构的不互相直接联接各构件间的瞬心时,可应用三心定理来求。 5.3个彼此作平面平行运动的构件间共有 3 个速度瞬心,这几个瞬心必定位于一条直线上。 6.机构瞬心的数目K与机构的构件数N的关系是K=N(N-1)/2 。 7.铰链四杆机构共有6个速度瞬心,其中3个是绝对瞬心。 8.速度比例尺μν表示图上每单位长度所代表的速度大小,单位为:(m/s)/mm 。 加速度比例尺μa表示图上每单位长度所代表的加速度大小,单位为(m/s2)/mm。 9.速度影像的相似原理只能应用于构件,而不能应用于整个机构。 10.在摆动导杆机构中,当导杆和滑块的相对运动为平动,牵连运动为转动时(以上两空格填转动或平动),两构件的重合点之间将有哥氏加速度。哥氏加速度的大小为2×相对速度×牵连角速度;方向为相对速度沿牵连角速度的方向转过90°之后的方向。 P直接标注在图上)。 二、试求出图示各机构在图示位置时全部瞬心的位置(用符号 ij
12 三、 在图a 所示的四杆机构中,l AB =60mm,l CD =90mm ,l AD =l BC =120mm ,ω2=10rad/s ,试用瞬心法求: 1)当φ=165°时,点C 的速度v C ; 2)当φ=165°时,构件3的BC 线上速度 a ) 24) 14(P 13) P 24 P 23→∞
层次分析法 1)建立层次结构模型: (2)构造判断矩阵 判断矩阵() ij A a =应为正互反矩阵,而且ij a 的判断如下(1~9尺度法): (3)单层排序及一致性检验 1、单层排序 求解判断矩阵A 的最大特征值max λ,再由最大特征值求出对应的特征向量
ω()max A ωλω=,并将ω标准化,即为同一层相对于上一层某一因素的权重,根据此 权重的大小,便可确定该层因素的排序。
2、一致性检验 取一致性指标max 1 n CI n λ-= -,(n 为A 的阶数) 令CR RI = ,若0.1CR <,则认为A 具有一致性。 否则,需要对A 进行调整,直到具有满意的一致性为止。 (4)层次总排序及一致性检验 假定准则层12,,,n C C C 排序完成,其权重分别为12,, ,n a a a ,方案层P 包含m 个方 案:12,, ,m P P P 。其相对于上一层的()1,2, ,j C j n =对方案层P 中的m 个方案进行单层排序,其排序权重记为12,,,j j mj b b b ()1,2, ,j n =,则方案层P 中第i 个方案Pi 的总 排序权重为 1 n j ij j a b =∑,见下表: 从而确定层的排序。 例: 纯文本文件txt3.txt 中的数据格式如下: 1 1 1 4 1 1/ 2 1 1 2 4 1 1/2 1 1/2 1 5 3 1/2 1/ 4 1/4 1/ 5 1 1/3 1/3 1 1 1/3 3 1 1 2 2 2 3 3 1 1 1/4 1/2
4 1 3 2 1/ 3 1 1 1/4 1/5 4 1 1/2 5 2 1 1 3 1/3 1/3 1 1/7 3 7 1 1 1/3 5 3 1 7 1/5 1/7 1 1 1 7 1 1 7 1/7 1/7 1 1 7 9 1/7 1 1 1/9 1 1 matlab程序: >> fid=fopen('txt3.txt','r'); n1=6;n2=3; a=[]; for i=1:n1 tmp=str2num(fgetl(fid)); a=[a;tmp]; %读准则层判断矩阵 end for i=1:n1 str1=char(['b',int2str(i),'=[];']); str2=char(['b',int2str(i),'=[b',int2str(i),';tmp];']); eval(str1); for j=1:n2 tmp=str2num(fgetl(fid)); eval(str2); %读方案层的判断矩阵 end end ri=[0,0,0.58,0.90,1.12,1.24,1.32,1.41,1.45]; %一致性指标[x,y]=eig(a); lamda=max(diag(y)); num=find(diag(y)==lamda); w0=x(:,num)/sum(x(:,num)); cr0=(lamda-n1)/(n1-1)/ri(n1) for i=1:n1 [x,y]=eig(eval(char(['b',int2str(i)]))); lamda=max(diag(y)); num=find(diag(y)==lamda);
机械原理 课程设计说明书 题目六杆机构运动分析 学院工程机械学院 专业机械设计制造及其自动化 班级机制三班 设计者秦湖 指导老师陈世斌 2014年1月15日
目录 一、题目说明??????????????????????????????????????????????????? 2 1、题目要求????????????????????????????????????????????? 3 2、原理图????????????????????????????????????????????? 3 3、原始数据????????????????????????????????????????????? 3 二、结构分析??????????????????????????????????????????????????? 4 三、运动分析????????????????????????????????????????????????? 5 1、D点运动分析?????????????????????????????????? 8 2、构件3运动分析??????????????????????????????????9 3、构件4运动分析??????????????????????????????????9 4、点S4运动分析??????????????????????????????????10 四、结论?????????????????????????????????????????????????????10 五、心得体会?????????????????????????????????????????????????????10 六、参考文献?????????????????????????????????????????????????????11
层次分析法程序举例: A=[1 1/7 1/5 2 4 1/3;7 1 3 5 5 3;5 1/3 1 5 5 3;1/2 1/3 1/5 1 2 1/3;1/4 1/5 1/5 1/2 1 1/5;3 1/3 1/3 3 5 1]; [v,d]=eig(A); eigenvalue=diag(d); lamda=max(eigenvalue); cil=(lamda-6)/5; crl=cil/1.26; w1=v(:,1)/sum(v(:,1)) 挑选合适的工作。经双方恳谈,已有三个单位表示愿意录用某毕业生。该生根据已有信息建立了一个层次结构模型,如下图所示。 程序: A=[1 1/7 1/5 2 4 1/3;7 1 3 5 5 3;5 1/3 1 5 5 3;1/2 1/3 1/5 1 2 1/3;1/4 1/5 1/5 1/2 1 1/5;3 1/3 1/3 3 5 1]; [v,d]=eig(A); eigenvalue=diag(d); lamda=max(eigenvalue); ci=(lamda-6)/5
cr=ci/1.26 w1=v(:,1)/sum(v(:,1)) B1=[1 1/4 1/2;4 1 3;2 1/3 1]; [v,d]=eig(B1); eigenvalue=diag(d); lamda=max(eigenvalue); cil1=(lamda-3)/2 cr1=cil1/0.52 b1w=v(:,1)/sum(v(:,1)) B2=[1 1/4 1/5;4 1 1/2;5 2 1]; [v,d]=eig(B2); eigenvalue=diag(d); lamda=max(eigenvalue); cil2=(lamda-3)/2 cr2=cil2/0.52 b2w=v(:,1)/sum(v(:,1)) B3=[1 1/2 2; 2 1 3;1/2 1/3 1]; [v,d]=eig(B3); eigenvalue=diag(d);