编号: 哈尔滨工业大学 大一年度项目中期检查报告 项目名称:仿生六足机器人 项目负责人:学号 联系电话:电子邮箱: 院系及专业:机电工程学院 指导教师:职称: 联系电话:电子邮箱: 院系及专业:机电工程学院 哈尔滨工业大学基础学部制表 填表日期:2014 年 6 月28 日
一、项目团队成员(包括项目负责人、按顺序) 二、指导教师意见 三、项目专家组意见
四、研究背景 1.研究现状 4.1国内研究现状 随着电子技术发展,计算机性能的提高,使多足步行机器人技术进入了基于计算机控制的发展阶段。其中有代表性的研究为1993年,美国卡内基-梅隆大学开发出有缆的八足步行机器人DANTE,图1所示,用于对南极的埃里伯斯火山进行了考察,其结构由2个独立的框架构成。这一阶段研究的重点在于机器人的运动机构的设计、机器人的步态生成与规划及传统的控制方法在机器人行走运动控制过程的应用。Boston Dynamics公司的Big Dog四足机器人用于为军队运输装备,其高3英尺,重165磅,可以以3.3英里的速度行进,其采用汽油动力。 图1 Adaptive Suspension Vehicle 图2 Odex1步行机器人 图3 MIT腿部实验室的四足和双足机器人图4 DANTE步行机器人 由于新的材料的发现、智能控制技术的发展、对步行机器人运动学、动力学高效建模方法的提出以及生物学知识的增长促使了步行机器人向模仿生物的方向发展。 4.2国外研究现状 我国步行机器人的研究开始较晚,真正开始是在上世纪80年代初。1980年,中国科学院长春光学精密机械研究所采用平行四边形和凸轮机构研制出一台八足螃蟹式步行机,主要用于海底探测
基于混合推进方式的水下仿生鱼机器人研究设计 发表时间:2019-06-11T10:57:56.553Z 来源:《科技研究》2019年3期作者:姜志斌[导读] 论文以水下机器人为研究对象,简要地介绍了水下机器人的总体性能和历史背景,着重对其运动方式和外观设计展开了研究。 (南京工程学院 211100) 摘要:论文以水下机器人为研究对象,简要地介绍了水下机器人的总体性能和历史背景,着重对其运动方式和外观设计展开了研究。 关键词:混合推进式;仿生;机器人设计 1 水下仿生鱼机器人概述 1.1 水下机器人的背景 随着全球经济、科研活动的深入发展,地球的陆地资源正在逐步减少,有朝一日终将会被挖掘殆尽。而地球表面60%以上是海洋,海洋中蕴藏着比陆地上更加丰富的自然资源。 而面对海洋这么大的面积,使用机器取代人力是必然的发展趋势。目前机器人发展迅速,海底机器人正变得越来越重要。 1.2 仿生机器人的起源 科学家们通过将仿生学和机器人两大学科相结合,提出了水下仿生机器人这一概念,水下仿生机器人根据海洋生物的外形结构和运动方式进行设计,由于海洋生物进过了长期的进化,其外形结构能够很好地适应水下的环境,因此设备运用仿生的理念能帮助人类更好地了解海洋。 美国麻省理工学院(MIT)作为第一个研究机器鱼的科研机构,开启了水下仿生机器人研究的先河。研究人员于1994年研制成功了第一条仿生机械鱼,他们的主要着重点就是通过提高机器鱼在水下运转的高效性和灵活程度以模拟鱼类的运动形式。紧接着,英国赛克斯大学(Essex)就以鱼类结构为模板,按照鱼类的运动方式来解决和优化机器人在水下活动的直线和转向问题。而美国海洋学中心则是把对生物模仿得更加彻底,研制出与龙虾外形极为相似的“机器龙虾”,按照龙虾的身体部分来设计相关功能,大大提高了其在水下的稳定性与灵活性。 1.3 水下仿生鱼机器人的设计意义 水下仿生鱼机器人用途广泛,涉及到各个领域。在民用方面,通过采集水下图像可完成资源勘探、海洋生物研究、海底地势地貌绘制、海底管道检修、鱼群监测、地理研究、水质采用等等。在军用方面,可以为水下机器人加装声呐、排雷装置等,从而执行特定的军事任务,如定点监控、海底侦查、信息传输、协同作战等等。由此可见,水下仿生鱼机器人的设计具有很大的发展前景,如何合理地设计水下仿生鱼的外观结构,使其实现相应的功能尤为重要。 1.4水下仿生鱼机器人的使用设定 常规的水下仿生鱼机器人由于要实现各种功能导致其本身体积太大,从而引发了不够灵活、耗能严重等各种问题。比如“海筝Ⅱ型”遥控自治水下机器人,其主尺寸有1.2m*0.5m*0.25m,自带锂电池,但只能在水下工作6h,过短的作业时间成为其不足之处。因此,本次设计在功能方面只打算保留其摄像、信号发送接收这些基本功能,在设定上算是一种探测类机器人,好处是结合混合推进的运动方式其可以延长水下工作周期,大量地投放可以对某片区域进行长期的监测,通过信号传递告知人们其探测到的相关信息,然后再由工作人员对其传回的信息进行分析,针对某一问题进行解决,这样可以节省大量的人力物力。 2 混合推进运动方式概述 2.1 混合推进运动方式的概念 所谓混合推进这种运动方式即设备不仅仅是靠单一的推进方式来运动。首先,设计的水下仿生机器人在造型上选择模仿鳐鱼这类鱼类的外观,宽大的机身使得设备能够很好地悬浮在水中,然后通过周围水流的波动来带动设备前进后退等等,这方面即为外力推进。与此同时,设备本身留有一定的空间来放置发动电机,通过电机带动螺旋桨来推动设备前进,这点即为自身推进。设备总体而言就是靠这两种方式来实现自身运动。 2.2 混合推进方式的优点 混合推进式这个概念的提出是基于一个设备要在水下进行长期作业的大前提。目前已有的水下机器人设备有一个通病,即设备并不能在水下长期作业,要定期通过人工检测、维护、更换动力电源。因此针对这方面的缺陷现提出混合推进这一概念,设备投放至水下后,暂时先不启用其自身携带的推进装置,使其在洋流的推动下被动运动,这样设备就能在水下进行长期的作业,同时其运动的范围更加的广泛,采集到的数据更加随机,不刻意地设定探测区域往往能够带来一些意想不到的结果。只有在紧急状况下,通过水下机器人自身传回的信号提示,操作人员再通过手动操作的方式来启动其自身所携带的推进装置,对机器人进行回收、障碍撤离等等。多种推进方式相结合的模式拥有使设备的作业时间更长久,采集的数据更广泛等等优点。 3 外观设计要点 3.1 外观设计灵感 设备在外观方面采用了仿生的设计方式,造型模仿了鳐鱼这类鱼类的外观,具有扁平宽大的特点,这种造型使得设备具有一定的浮力,能够很好地悬浮于水下。同时仿生的外观可以使设备很好地融入进生物之间,不容易被水下生物所排斥,从而能够采集到更多的信息。另外仿生的造型也具有一定的隐蔽性,为设备在水下长期作业不被外界因素影响提供有力条件。 3.2 设计的优点 总的来说这种混合推进方式的水下仿生鱼机器人具有以下几点优点:1.作业时间长,能够在水下长时间地工作,从而使得采集到的信息更加完整;2.对能源的调配合理,设备在水下大部分的时间都是通过洋流的推进来改变自身的位置,能够很好地减少自身的能源消耗,从而达到长期作业的目的;3.设备适应面广泛,能够进行前后左右上下多姿态的调整,能够适应不同的状态;4.隐蔽性良好,仿生的设计使得设备能够更好地融入到环境中,这样其遭遇外力影响甚至破坏的几率就会相对降低。
H a r b i n I n s t i t u t e o f T e c h n o l o g y 仿生感知与先进机器人技术 课程报告(1) 报告题目:仿生机械的发展 院系:机电学院 班级: 姓名: 学号: 哈尔滨工业大学机电工程学院
仿生学及仿生机械学的由来 仿生学(Bionics)是模仿生物的特殊本领的一门科学。仿生学籍了解生物的结构和功能原理,来研制新的机械和新技术,或解决机械技术的难题。1960年由美国的J.E.Steele 首先提出。 仿生学这个名词来源于希腊文“Bio”,意思是“生命”,字尾“nic”有“具有……的技术中利用这些原理,提供新的设计思想、工作原理和系统架构的技术科学。 仿生机械学是上世纪60年代初期出现的一门综合性的新兴边缘学科,它是生命科学与工程技术科学相互渗透、相互结合而形成的。包含着对生物现象进行力学研究,对生物的运动、动作进行工程分析,并把这些成果根据社会的要求付之实用化。 仿生学的研究方向 (1)生物材料力学和机械力学,是以骨或软组织(肌肉、皮肤等)作为对象,通过模型实验方法,测定其应力、变形特性,求出力的分布规律。还可根据骨骼、肌肉系统力学的研究,对骨和肌肉的相互作用等进行分析。另外,生物的形态研究也是一大热门。因为生物的形态经过亿万年的变化,往往已形成最佳结构,如人体骨骼系统具有最少材料、最大强度的构造形态,可以通过最优论的观点来学习模拟建造工程结构系统。 (2)生物流体力学,主要涉及生物的循环系统,关于血液动力学等的研究已有很长的历史,但仍有许许多多的问题尚未解决,特别是因为它的研究与心血管疾病关系十分密切,已成为一门倍受关注的学科。 (3)生物运动学,生物的运动十分复杂,因为它与骨骼和肌肉的力学现象、感觉反馈及中枢控制牵连在一起。虽然各种生物的运动或人体各种器官的运动测定与分析都是重要的基础研究,但在仿生机械学中,目前特别重视人体上肢运动及步行姿态的测定与分析,因为人体上肢运动机能非常复杂,而下肢运动分析对动力学研究十分典型。这对康复工程的研究也有很大的帮助。 (4)生物运动能量学,生物的形态是最优的,同样,节约能量消耗量也是生物的基本原理。从运动能量消耗最优性的特点对生物体的运动形态、结构和功能等进行分析、研究,特别是对有关能量的传递与变换的研究,是很有意义的。
仿生水下机器人运动控制方法研究 o 成 巍 李喜斌 孙俊岭 袁建平 徐玉如 哈尔滨工程大学水下机器人技术实验室 [摘 要] 近年来仿生技术在水下机器人上的应用已经成为水下机器人的重要研究方向之一。仿生水下机器 人采用尾鳍提供前进动力和改变航向,比传统的桨舵具有高效性和高机动性。本文根据仿生水下机器人水池 试验结果讨论了其运动性能,并在此基础上提出了仿生水下机器人运动控制方法,最后通过仿真试验验证了 该方法的可行性。运动控制研究,是仿生水下机器人其它使命的基础,具有重要的意义。 [关键词]水下机器人;仿生推进;智能控制 [Abstract] The application of the bionic technology in the fields of the Underwater Vehicle has been more attractive recently. Compared to the traditional propeller and rudder, the bionic UV inspired by the fish cruises and turns by its caudal fin, which gives more efficiency and more maneuverability. First we discuss the movement capability of the bionic UV according to the results of its water tank tests. Then we give a method of its motion control here. And the feasibility of the method was proved by simulation experiments at last. Motion control is meaningful for the bionic UV to complete other tasks. [Key Words] underwater vehicle, bionic propulsion, intelligent control. 0.引言 近年来,模仿水生动物推进方式的仿鱼尾推进系统应用于水下无人探测器的可行性已经得到了初步的验证。如美国MIT的RoboTuna [1]、美国Draper实验室的VCUUV[2]、日本东京工业大学的机器海豚[3]、哈尔滨工程大学的“仿生-Ⅰ”[4]等,都采用了具有较高巡游速度的金枪鱼或海豚作为模型,研究仿生推进和操纵系统,以期改善传统水下机器人推进和操纵性能,增强水下机器人的运动能力。仿生水下机器人采用尾鳍提供前进的动力和改变航向,与传统的采用桨舵的水下机器人在运动性能和控制方法上都有很大的差别。因此,研究仿生水下机器人的操纵控制方法成为其重要的研究方向之一。本文以“仿生-I”为研究对象,根据其船模试验水池(108×7×4m)试验了解其运动性能,并在此基础上讨论其运动控制方法。 1.“仿生-I”结构 仿生水下机器人“仿生-I”号,以蓝鳍金枪鱼为蓝本,长2.4m,最大直径0.62m,排水量329kg,负载能力70kg,潜深10m,配有月牙形 [作者简介] 成巍(1977–),河北张家口,博士生,研究领域:机器人运动控制与仿真、生物流体力学。
智能机器人课程报告 学院:电气工程与自动化 姓名:郭胜 班级:自动化10-06 内容提要:远古时期地球上诞生了无组织的单细胞生物,然后形成了具有一定组织结构的多细胞生物,最后形成了具有复杂系统的高等生物,而我们人类则是其中的佼佼者。人类具有复杂的神经系统,具
有超强处理能力和自我意识的大脑,以及灵活坚韧的身躯,这使得人类在长期自然竞争中生存下来。随着科技的发展的,很多问题的解决需要耗费很多人力,人们迫切需要一种机器来代替自己做事情,这就形成了机器人的雏形。随着科技的发展,以及认知心理学,神经心理学,和计算科学的发展,人们提出了制造具有判断,推理,学习,自我意识的机器人的想法,这就是人工智能。智能机器人就是基于人工智能的具有判断,思维,推理,学习的能力的新一代机器人,他们在一定程度上具有了人类的思维方式。 关键词:人工智能,智能机器人,机器视觉 一关于智能机器人的一些认识 我们从广泛意义上理解所谓的智能机器人,它给我们的最深刻的印象是一个独特的进行自我控制的“活物”。其实,这个自控“活物”
的主要器官并没有像真正的人那样微妙而复杂,他的组织结构和工作方式在一定程度上模仿了生物体的功能与控制机制。下面我们以人体的工作机制为引例,引入机器世界的组成结构。 人具有耳朵,眼睛,鼻子,舌头,等感觉器官,用于接受外界刺激,外界刺激经由这些传感器变成微电信号,经由神经传导网络送入各级处理神经系统进行处理,处理结果以神经冲动的形式传导给相应的组织和器官,从而引起人体对于外界刺激的反应。在这个过程中,我们不难发现,人类的活动机制包括宏观上的硬件和软件组成,其中硬件是各种功能形成的前提,是逻辑,抽象的基础;软件是基于硬件的高级抽象性的活动,是一种虚拟的逻辑形式,他以思维,意识的形式存在。软件硬件的结合,才能形成具有一定行为能力的个体。机器人就在以上理论基础上建立的复杂系统的集合。和人体相似,机器人需要各种传感器对外界和本体内部信息进行收集和转换,然需要各种通信网络将信息准确,高速的传输出去,之后需要具有高处理能力的处理器对传入的信号进行分析和处理,最后需要具有一定自由度的机械系统去完成处理器的指令要求。总的来说,机器人也是有两个大部分总成,一个是实现各种机械运动和逻辑活动的硬件,二是实现各种控制的程序和数据。 机器人可以根据构造他们的硬件和软件进行分类。根据硬件的不同,可以将机器人分为双足,三足,多足,类人型等,根据软件部分大体可以分为非智能机器人和智能机器人。智能机器人是基于人工智能的机器人,他们具有形形色色的内部信息传感器和外部信息传感器,如
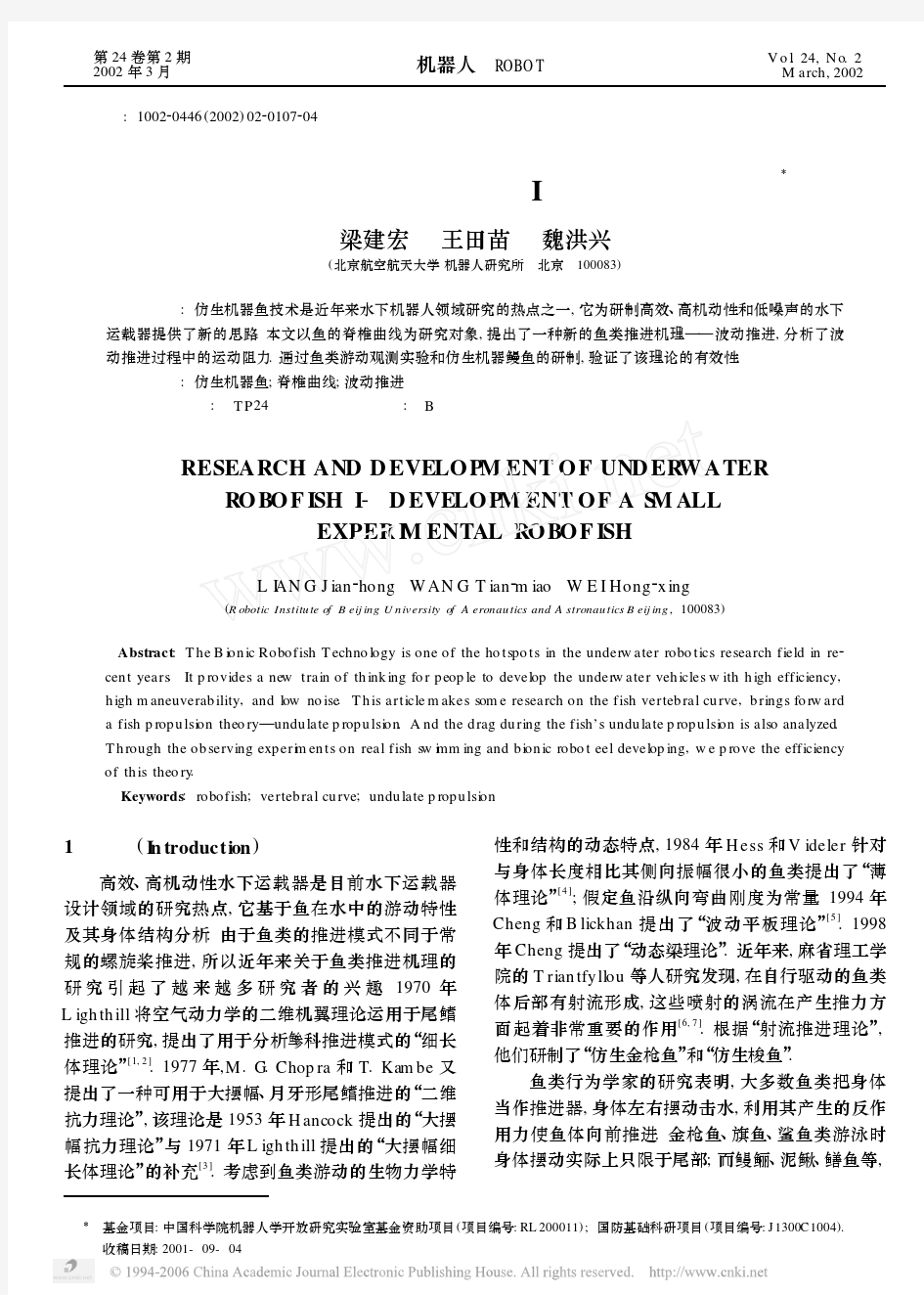
文章编号 2 2 2 水下仿生机器鱼的研究进展水动力学实验研究 Ξ 梁建宏王田苗魏洪兴陶伟 北京航空航天大学机器人研究所北京 摘要作为仿生推进技术研究的一个主要环节仿生机器鱼平台的实验测试研究具有重要的意义本文建立了一套比较系统完整的机器鱼水动力学定性观察定量测量的实验环境并进行了速度功率参数影响测定实验! 鱼体流动显示实验和鱼体运动阻力测定实验 关键词机器鱼功率测试流动显示阻力测试中图分类号 ×°文献标识码 ΥΝΔΕΡ?ΑΤΕΡΡΟΒΟΦΙΣΗΡΕΣΕΑΡΧΗΠΡΟΓΡΕΣΣ ΙΙΙ ΗΨΔΡΟΔΨΝΑΜΙΧΣΕΞΠΕΡΙΜΕΝΤΣΟΦΡΟΒΟΦΙΣΗ 2 ? × 2 ?∞ 2? × ? ΡοβοτιχΙνστιτυτε Υνι?ερσιτψοφΑεροναυτιχσανδΑστροναυτιχσ Βει?ινγ Αβστραχτ ∏ ? ∏ × ∏ ? ∏ √ ∏ √ √ ∏ √ ∏ √ ? ∏ √ ? 2 √ ? ∏ ? √ ∏ ∏ Κεψωορδσ ∏ √ ∏ ∏ 1 引言Ιντροδυχτιον 对水生动物的流体力学研究始于二十世纪六十年代近年来随着仿生学的发展人们对海洋生物高超的推进能力有了新的认识并试图通过先进的实验设备和手段解释鱼类独具的高效! 高机动性的推进机理年率先对体形瘦长以鳗鲡模式游动的
游鱼提出了细长体模型得到了定常线性化解≈ 年加州理工大学的× ≠ ?提出了二维波动模型加入了前缘吸力及尾缘尾迹的作用 对于以鱼参科模型和月牙尾推进的情形波状摆动主要集中于后体而后体段逐渐缩小形成尾柄然后连接展长较大的尾鳍波幅剧烈增大基于线化理论的解体方法已不能处理研究主要用实验方法典型的工作是 ×的×等有关水翼二 维翼剖面作的摆动的实验≈ 表明在一定的频率! 振 幅等参数组合下推进效率可以接近他们还用物体在摆动水翼前产生尾涡以模拟鱼身的尾迹表明了摆动尾鳍可利用这些旋涡进一步提高推力和推进效率使得人们对鱼类的高效推进机理的认识提高了一大步 对于急剧激动如爆发启动! 快速转弯的鱼类也有了一些研究? 等人年用?° ?方法的流动显示方法显示了产生快速机动时伴随有体涡与尾鳍的相互作用≈ 年 ×的等对摆动鱼体的减阻进行了研究他们对自行研制的一条实验用的自由度仿生机器鱼在水槽中进行了拖曳实验≈ 测试了阻力降低的效果对于五个参数即相位角波长冲击角尾迹宽度≥ ∏ 数的变化所受的影响证明阻力降低对两个因素敏感一个是身体的波动速 第卷第期年月 机器人ΡΟΒΟΤ ? ∏ Ξ 基金项目中国科学院机器人学开放研究实验室基金资助项目收稿日期 度要超过运动速度另一个是≥ ∏ 数只能在一定范围内运动在一定条件下阻力
浙江海洋学院 “巨鱿”水下机器人“Architeuthis Dux” Underwater Vehicle 船舶与海洋工程--智慧海洋研发团队 2012-6-1——2012-8-29
起 点 终点 第一期,挑战竞赛设计 Underwater Vehicle 设计要求 比赛场地: 海洋航行器按申报功能进行5分钟的实航。室内游泳池(长50米,宽21米,深2米,池壁等间距布设8台水下摄像机)。比赛场地上有若干限宽门,门宽1m ,高度为从池底起出水0.5m ,涂装醒目的颜色。比赛中除非航行器沉底,否则不得人工干预比赛。 起点--终点 限宽门布设图→→→ 技术要求,各种设计不做限制。 动力装置:鼓励采用除螺旋桨之外的推进器; 姿态控制:鼓励采用除鳍舵之外的姿态控制方式; 控制方式:鼓励采用除人工遥控控制之外的控制方式; 数据传输:安装数据链路,在地面实时显示航行轨迹。 系统使用频率要求:系统使用频率应符合国家无线电管理委员会的频率分配规定,参赛者应在规定时间上报系统使用频率,一经上报不能改变。现场不能随意开机,届时赛场将备扫频仪和GPS 信号监视设备,违例将被取消参赛资格。 评分要点:根据航行器航行姿态、航线航行、穿越限宽门(或避障碍)、动力方式、航行控制的方式、航行控制的精确性和稳定性、抗过载结构设计等内容评分,设加分项。分值包含航行评分、功能评分,系评分项 加分项 1. 使用新型推进方式 5-10 2. 使用新型导航控制方式 5-10 3. 装载前视或下视或侧视摄像装置,且可实时下传图像供地面显示 3-5 4. 具备下潜持续航行能力 2-5 5. 总体设计新颖 2-5 6. 加工水平 2-5 7. 航海文化创意 1-5 8. 其它功能(每项) 1-2
仿生鱼机器人设计说明书
目录 第一章绪论 (3) 1.1目的及意义 (4) 1.2研究现状 (4) 1.3本文的主要工作 (4) 第二章概述 (5) 2.1 整体构思 (5) 2.2 仿生依据 (5) 第三章机械结构设计 (7) 3.1机械设计思路及建模 (7) 3.2创新点 (8) 3.3 零件明细 (9) 第四章仿真分析 (10) 第五章电路设计 (12) 第六章控制系统 (13) 第七章总结 (17) 7.1优势及创新点 (17) 7.2主要关键技术 (17) 7.3 应用前景与趋势 (18) 7.4 不足与改进 (18)
仿生鱼机器人设计说明书 第一章绪论 1.1目的及意义 21世纪是海洋的世纪,占全球71%面积的海洋将是下一个世纪,也是未来人类赖以生存的资源海洋,对于人类的发展和社会的进步将起到至关重要的作用。在民用上,海洋蕴藏着丰富的矿物资源、海洋生物资源和能源,是人类社会可持续发展的重要财富。因此,对于海洋的开发和争夺成了很多发达国家的战略重点,而且愈演愈烈。在各种海洋技术中,作为用在一般潜水技术不可能到达的深度或区域进行综合考察和研究并能完成多种作业使命的水下机器人使海洋开发进入了新时代。随之“蓝色经济”越来越成为各沿海地区经济发展的“正能量”,大规模的开发探测和利于海洋资源,已经成为我们21 世纪要面对和必须解决的现实问题。另外,军事方面对其需求也日益增加,为了适应这种需求,研究和开发潜水器和水下机器人成为了极佳的选择。鱼类经过长期的自然选择,具备非凡的游动能力,近年来随着仿生技术的进步,人类纷纷模仿自然界中鱼类的运动方式和运动器官,即各种各样的水下机器人。世界上第一台水下机器人“Poodle”诞生于1953 年。近20 年来,水下机器人有了很大的发展,它们既可军用又可民用。到目前为止,全世界大约共建造了6000 多台各种各样的水下机器。水下机器人有广泛的应用空间,民用和军用均可,不仅可以代替潜水员在深水长时间工作,降低工作风险,提高工作效率,而且还可以检测水污染状况,监测鱼类生长状况,探测海底火山活动状况;在军事方面,可以用于跟踪敌人的船舰和潜艇,捕获地方军事信息,也可以降低敌人对我军的探测几率,甚至可以携带炸药至敌人军舰处,炸毁敌方舰艇的动力系统,摧毁敌方舰队。此外,仿鱼形水下机器人还可以应用于海洋动物园。仿鱼形水下机器人是一种集机械、智能控制与一体的高科技设备,在民用、军事、科学研究等领域体现出了广阔的应用前景和巨大的潜在价值。
水下机器人的发展现状 摘要:介绍了国内外典型水下机器人的性能特点,阐述了国内外水下机器人发展的历史及现状,总结了水下机器人发展中存在的一些关键问题,并对未来水下机器人领域的发展动向作出了展望. 0引言 机器人技术是集运动学与动力学理论、机械设计与制造技术、计算机硬件与软件技术、控制理论、电动伺服随动技术、传感器技术、人工智能理论等科学技术为一体的综合技术.它的研究与开发标志着一个国家科学技术的发展水平,而其在各种机械领域的普及应用,则显示了这个国家的经济和科技发展的实力.世界上许多国家为了推进本国的机器人开发事业,打入竞争日益激烈的国际高科技市场,不惜投入巨大的人力、财力来推动机器人技术的发展,开发出了许多类型的机器人.机器人的应用领域也逐渐从人工环境扩展到了水下和宇宙.随着人口数量的增长和科学技术水平的不断提高,人类已把海洋作为生存和发展的新领域,海洋的开发与利用已经成为决定一个国家兴衰的基本因素之一.从而使水下机器人具有更加广阔的应用前景.水下机器人设计是一项综合性的复杂工程,技术密集度高,是公认的高科技,它的研制水平体现了一个国家的综合技术力量. 水下机器人一般可以分为两大类:一类是有缆水下机器人,
习惯称为遥控潜水器(RemoteOperatedVehicle,简称ROV);另一类是无缆水下机器人,习惯称为自治潜水器(AutonomousUnderwaterVehicle,简称AUV).此外,按使用的目的分,有水下调查机器人(观测、测量、试验材料的收集等)和水下作业机器人(水下焊接、拧管子、水下建筑、水下切割等作业);按活动场所分,有海底机器人和水中机器人. 水下机器人在20世纪50年代初诞生时,由于所涉及的新技术还不够成熟,电子设备的故障率高,通信的匹配以及起吊回收等问题没有很好解决,因此发展不快,没有受到人们的重视.到了60年代,国际上开始两大开发技术,即宇宙和海洋开发,促使远距离操纵型机器人得到了很快的发展,到了80年代,由于海洋开发与军事上的需要,尤其是水下机器人本体所需的各种材料及技术已得到了较好的解决,水下机器人才得到了很大发展,开发出了一批能工作在各种不同深度,进行多种作业的机器人,可用于石油开采、海底矿藏调查、救捞作业、管道敷设和检查、电缆敷设和检查、海上养殖、江河水库的大坝检查及军事等领域.目前,水下机器人大部分是框架式和类似于潜艇的回转细长体,随着仿生科技技术的不断发展,仿生鱼形态甚至是运动方式的水下机器人将会不断发展。水下机器人工作在充满未知和挑战的海洋环境中,风、浪、流、深水压等各种复杂的海洋环境对机器人的运动和控制干扰严重,使得水下机器人的通信和导航定位十分困难,这是与陆地机器人最大的
课程设计设计题目:仿生机器龟设计
课程设计任务书 课程设计题目:仿生机器龟设计
仿生机器龟设计 1 设计主要内容及要求 1.1设计目的: (1)了解机器人技术的基本知识以及有关电工电子学、单片机、机械设计、传感器等相关技术。 (2)初步掌握机器人的运动学原理、基于智能机器人的控制理论,并应用于所设计的机器人中。 (3)通过学习,具体掌握机器人的控制技术,并使机器人能独立执行一定的任务。 1.2基本要求: (1)要求设计一个具有仿生功能的机器人; (2)要求设计机器人的行走机构,控制系统、传感器类型的选择及排列布局。 (3)要求机器人具有趋光功能(龟喜欢晒太阳),避障功能(不能撞到障碍物上),知道饥饿(电池电量检测功能)。 1.3发挥部分: 自由发挥 2 设计过程及论文的基本要求: 2.1 设计过程的基本要求 (1)基本部分必须完成,发挥部分可任选;
(2)符合设计要求的报告一份,其中包括总体设计框图、电路原理图各一份; (3)设计过程的资料、草稿要求保留并随设计报告一起上交;报告的电子档需全班统一存盘上交。 2.2 课程设计论文的基本要求 (1)参照毕业设计论文规范打印,包括附录中的图纸。项目齐全、不许涂改,不少于3000字。图纸为A4,所有插图不允许复印。 (2)装订顺序:封面、任务书、成绩评审意见表、中文摘要、关键词、目录、正文(设计题目、设计任务、设计思路、设计框图、各部分电路及相应的详细的功能分析和重要的参数计算、工作过程分析、元器件清单、主要器件介绍)、小结、参考文献、附录(总体设计框图与电路原理图)。 3 时间进度安排 沈阳工程学院 机器人技术及其应用课程设计成绩评
目录 1.绪论 1 1.1课题背景 1 1.2 慧鱼机器人 2 1.3 走进实验室 3 1.4 按键式传感器 3 1.5 设计工作原理 4 1.6慧鱼模型操作规程 5 2. 仿生机器人6 2.1仿生机器人迈克仿真示意图 6 2.2仿生机器人迈克仿真程序图示 6 2.3仿生机器人结构简图7 3. 移动机器人8 3.1 移动机器人基础模型8 3.2 移动机器人仿真图8 3.3移动机器人结构简图9 3.4移动机器人仿真程序框图10 4.工业寻光机器人10 4.1 寻光机器人仿真图11 4.2寻光机器人结构简图11 4.3寻光机器人仿真程序12 5.躲避障碍机器人14 5.1 躲避机器人仿真模型14 5.2连线图和结构简图15 5.3躲避机器人仿真程序16 6.工业寻踪机器人18 6.1寻踪机器人仿真模型19 6.2寻踪机器人仿真图
一、绪论 1.1课题背景 由机器人的发展和快速广泛的被使用,可知科学家对于机器人的功能也相提高,除了超强的逻辑运算、记忆能力及具备类似的自我思考能力,另外在机器人的外表及内部结构,科学家更希望能模仿人类。对于外在资讯的选集,也透过各种感应器,企图达到类似人类各种触觉的功能,选集了外在环境的资讯,一旦外在环境起了改变,机器人一定要能随着变化,做出该有的反应动作,更新自己的资料库,达到类似人类学习的功能。 移动式机器人形态分为车轮式、特殊车轮式、不限轨道式、不行式等,若是在平坦的地面上移动时,车轮式是最具效率的,不懂机构简单,且具实用性,但其缺点是在凹凸不平的岩地上便不能行走。此外,因普通车轮无法在阶梯及有段差的地外行走,因此积极研究一种有车轮、三辆以上连结构的特殊形态,及特殊组合的不限轨道式机器人,最近亦努力开发步行机器人,使其能登上阶梯。 本次研究即为移动机器人设计及其在控制器的实现,是说明当移动机器人在轨行动作中若遇到障碍物时会透过微动开关将讯息传回电路板中进行判断,再配合计数器的动作使机器人能避开障碍物并往下个路径前进,知道要到远的目标。
水下机器人研究现状与 探索 Document number:WTWYT-WYWY-BTGTT-YTTYU-2018GT
《大学计算机基础》 课程报告 论文名称:水下机器人研究现状与探索二零一七年一月 目录
水下机器人研究现状与探索 朱钰璇 摘要:本文总结了水下机器人的研究历史,现状与目前的发展趋势,具体分析了现代水下机器人应用的技术,指出他们的优缺点,并且针对未来的深海探索机器人的材料,结构,移动方式,动力来源,仿造乌贼等海洋软体动物提出设想,实际应用前景广阔。随着科学技术的发展,水下仿生机器人在智能材料制成的驱动装置、游动机理方面会不断地完善,在个体的智能化和群体的协作方面也会有很大的发展。 关键词:水下机器人;深海探索;仿生; PRESENTSTATEANDFUTUREDEVELOPMENTOFUNMANNEDUNDERW ATERVEHICLETECHNOLOGYRESEARCH ZHUYuxuan Abstract:Inthispaper,thehistory,;theexplorationofdeepsea;Bionic 1引言(Introduction) 世界海洋机器人(unmannedmarinevehicles,UMV)发展的历史大约60年,经历了从载人到无人,从遥控到自主的主要阶段。加拿大国际潜水器工程公司(ISE)总裁麦克·法兰将海洋机器人的发展历史分为4个阶段[1],并将前3个阶段
称为革命(revolution):第一次革命在20世纪60年代,以3人潜水器为标志;第二次革命为70年代,以遥控水下机器人的迅速发展为特征;第三次革命大体为80年代,以自主水下机器人的发展和水面机器人(USV)的出现为标志。现在则是混合型海洋机器人的时代。 水下机器人(Unmannedunderwatervehicle,UUV)是一种可在水下移动、具有感知系统、通过遥控或自主操作方式、使用机械手或其他工具代替或辅助人去完成水下作业任务的机电一体化智能装置。水下机器人是人类认识海洋、开发海洋不可缺少的工具之一,亦是建设海洋强国、扞卫国家安全和实现可持续发展所必需的一种高技术手段。 水下机器人的移动方式十分多样。螺旋桨推进的水下机器人存在流体推进效率低、动作不灵活、噪音大、桨叶会伤害海洋动物等问题。针对这些问题,游动水下仿生机器人如机器鱼应运而生,但它们耐压能力较低。软体动物乌贼凭借喷射和鳍波动的高效、灵活的复合游动方式,成功地与鱼类竞技海洋;它们依靠肌肉性静水骨骼,活跃于从上千米的深海至海平面的广阔海域。[2]就当前水下仿生机器人的发展水平来看,现有水下仿生机器人的功能特性仍然与被模仿的生物存在很大差距。生物体本身结构复杂,其运动规律又难以观测,学科交叉方面也存在问题。这都限制了仿机器人的发展。在未来的发展中,应利用多学科优势并从生物性能出发,使得水下仿生机器人向着结构与生物材料一体化的类生命系统发展,才能在生产生活中发挥更为重要的作用。[3]
关于机器人实习报告 您需要登录后才可以回帖登录 | 注册发布 篇一:机器人实训报告 实训项目机器人模块组装实训报告 专业: 班级: 学号: 姓名: 指导老师: 机器人 1.简介: 机器人是高级整合控制论、机械电子、计算机、材料和仿生学的产物。在工业、医学、农业、建筑业甚至军事等领域中均有重要用途。 现在,国际上对机器人的概念已经逐渐趋近一致。一般来说,人们都可以接受这种说法,即机器人是靠自身动力和控制能力来实现各种功能的一种机器。联合国标准化组织采纳了美国机器人协会给机器人下的定义:“一种可编程和多功能的操作机;或是为了执行不同的任务而具有可用电脑改变和可编程动作的专门系统。”它能为人类带来许多方便之处! 2.来历:
robot,原为robo,意为奴隶,即人类的仆人。作家罗伯特创造的词汇。 3.组成: 机器人一般由执行机构、驱动装置、检测装置和控制系统和复杂机械等组成。 是驱使执行机构运动的机构,按照控制系统发出的指令信号,借助于动力元件使机器人进行动作。它输入的是电信号,输出的是线、角位移量。机器人使用的驱动装置主要是电力驱动装置,如步进电机、伺服电机等,此外也有采用液压、气动等驱动装置。 4.检测装置的作用: 是实时检测机器人的运动及工作情况,根据需要反馈给控制系统,与设定信息进行比较后,对执行机构进行调整,以保证机器人的动作符合预定的要求。作为检测装置的传感器大致可以分为两类:一类是内部信息传感器,用于检测机器人各部分的内部状况,如各关节的位置、速度、加速度等,并将所测得的信息作为反馈信号送至控制器,形成闭环控制。一类是外部信息传感器,用于获取有关机器人的作业对象及外界环境等方面的信息,以使机器人的动作能适应外界情况的变化,使之达到更高层次的自动化,甚至使机器人具有某种“感觉”,向智能化发展,例如视觉、声觉等外部传感器给出工作对象、工作环境的有关信息,利用这些信息构成一个大的反馈回路,从而将大大提高机器人的工作精度。 5.控制系统有两种方式:
关键词:水下机器人、智能水下机器人、智能体系、运动控制、通讯导航、探测识别、高效能源 随着人类海洋开发的步伐不断加快,水下机器人技术作为人类探索海洋最重要的手段得到了空前的重视和发展。作者对水下机器人进行了定义与分类。介绍了近年来国内外水下机器人的发展现状与发展趋势,重点针对智能水下机器人的主要关键技术及未来发展方向进行了分析。地球的表面积为5.1亿km2,而海洋的面积为3.6亿km2。占地球表面积71%的海洋是人类赖以生存和发展的四大战略空间——陆、海、空、天中继陆地之后的第二大空间,是能源、生物资源和金属资源的战略性开发基地,不但是目前最现实的,而且是最具发展潜力的空间。作为蓝色国土的海洋密切关系到人类的生存和发展,进入21世纪后,人类更加强烈的感受到陆地资源日趋紧张的压力,这是人类面临的最现实的问题。海洋即将成为人类可持续发展的重要基地,是人类未来的希望。水下机器人从20世纪后半叶诞生起,就伴随着人类认识海洋、开发海洋和保护海洋的进程不断发展。专为在普通潜水技术较难到达的区域和深度执行各种任务而生的水下机器人,将使海洋开发进人一个全新的时代,在人类争相向海洋进军的21世纪,水下机器人技术作为人类探索海洋最重要的手段必将得到空前的重视和发展[1]。 1海洋对人类的重要性
海洋作为蓝色国土,首先是一个沿海国家的“门户”,是其与远方联系的便捷途径,并且“门户”的安全是国家安全的重要组成部分,早在2 500多年前古希腊海洋学家锹未斯托克就提出过“谁控制了海洋,谁就控制了一切”。很久以来人们就依赖于海洋航道进行大量的物品贸易,现在整个世界大部分的货物运输都依赖于海上运输,海洋运输是整个经济正常运转必要的一环。更重要的是,现在很多国家的石油、矿石等最基本的生产资料大部分都依赖于海洋运输,海洋运输的安全和对海洋的控制力成为一个国家生存的基本保障。 近年来再次掀起海洋热的浪潮是因为陆上的资源有限,很多资源已经开发殆尽,而海洋中蕴藏着丰富的能源、矿产资源、生物资源和金属资源等,人们急需开发这些资源以接替所剩不多的陆上资源来维持发展。更为重要的是,地球上半数以上面积的海洋是国际海域,这些区域内全部的资源属于全体人类,不属于任何国家。但目前的现状是只有少数国家有能力对这些资源进行初步开采,这些国家在其已探明的区域拥有优先开采权,相对于那些没有能力开采的国家这几乎就等于独享这部分资源。因此海洋已经成为国际战略竞争的焦点,争夺国际海洋资源是一项造福子孙后代的伟大事业。所以水下技术成为目前重点研究的高新技术之一,智能水下机器人作为高效率的水下工作平台在海洋开发与利用中起到至关重要的作用。 2水下机器人的定义与分类
·24· NO.20 2018 ( Cumulativety NO.32 ) 中国高新科技 China High-tech 2018年第20期(总第32期) 1 引言 目前,随着社会的发展,工业和生活中对智能化和精细化的要求越来越高,机器人研究和设计成为研究热点。机器人的应用可以优化日常生活,满足人们日益增长的物质需求,同时在工业生产中也可以完成一些复杂和危险的任务,如机械装配、野外探险等。 近年来,海洋的战略地位越来越重要,水下机器人获得了极大的发展。海洋环境复杂多变,如何设计结构简单灵巧且适应性强的水下机器人成为机器人研究中的重点。科学家通过将仿生学和机器人两大学科相结合,提出了新的想法:水下仿生机器人。水下仿生机器人根据海洋生物的外形结构和运动方式进行设计。由于海洋生物经过了亿万年的进化演绎,其生物体模型对海洋环境的适应性强,所以水下仿生机器人将会更容易完成指定的工作,从而使人们在不破坏海洋生态系统的前提下更好地了解海洋、运用海洋。本文主要针对水下仿生机器人的发展现状进行综述。 2 机械结构设计 美国麻省理工学院(MIT)作为第一个研究机器鱼的科研机构,开启了水下仿生机器人研究的先河。研究人员在1994年研制成功了第一条仿生机械鱼,他们的主要着重点就是通过提高机器鱼在水下运转的高效性和灵活程度以模拟鱼类的运动形式。紧接着,英国塞克斯大学(Essex)就以鱼类结构 为模板,按照鱼类的运动方式来解决和优化机器人在水下活动的直线运动和转向的问题。而美国海洋学中心则是把对生物模仿进行得更加彻底,研制出与龙虾外形极为相似的“机器龙虾”。该“机器龙虾”按照龙虾的每个身体部分来设计相关功能,大大提高了其在水下的稳定性与灵活性。 目前,我国的一些研究机构也开始了针对水下仿生机器人的研究和探索。北京航天航空大学作为最早开始研究此领域的机构,已研制出可在水下连续工作2~3小时的仿生机器鱼。此后,国防科技大学、哈尔滨工程大学、中科院自动化研究所等也开展了不同程度的研究。 3 材料应用 水下环境复杂,因此对水下仿生机器人的材料要求十分严格。目前运用较为广泛的有如下几种材料: (1)高分子聚合物-金属复合材料。其重要特点是结合了高分子聚合物和金属材料的优点。高分子聚合物在大部分环境下都能承受一定程度上的变形,对外部环境的影响能够做出良好的调整,同时质量较轻,而金属材料则硬度较大。采用该复合材料能使机器人更加适应水下环境。 (2)镁合金材料。作为一种价格适中的材料,其主要特点是质量轻,非常适合用做机器人的外部轮廓,同时该材料硬度大,不易损坏。 (3)介电弹性材料。该材料在机器人驱动器上应用很广泛。作为一种柔软度较好的材料,其突 水下仿生机器人研究综述 蒲欣岩 (成都七中高新校区,四川 成都 610041) 摘要:随着海洋探索技术的不断发展,水下仿生机器人日益引起关注。针对水下仿生机器人的研究现状,文章从机械结构设计、材料应用和控制方法3个方面进行综述,并基于对水下仿生机器人的深入了解,对其未来的发展趋势进行分析。 关键词:水下仿生机器人;机械结构;控制方法 文献标识码:A 中图分类号:TP242文章编号:2096-4137(2018)20-024-02 DOI:10.13535/https://www.doczj.com/doc/8513521052.html,ki.10-1507/n.2018.20.08 收稿日期:2018-07-12 作者简介:蒲欣岩(2000-),女,四川成都人,成都七中高新校区学生,研究方向:自动化控制、机器人。
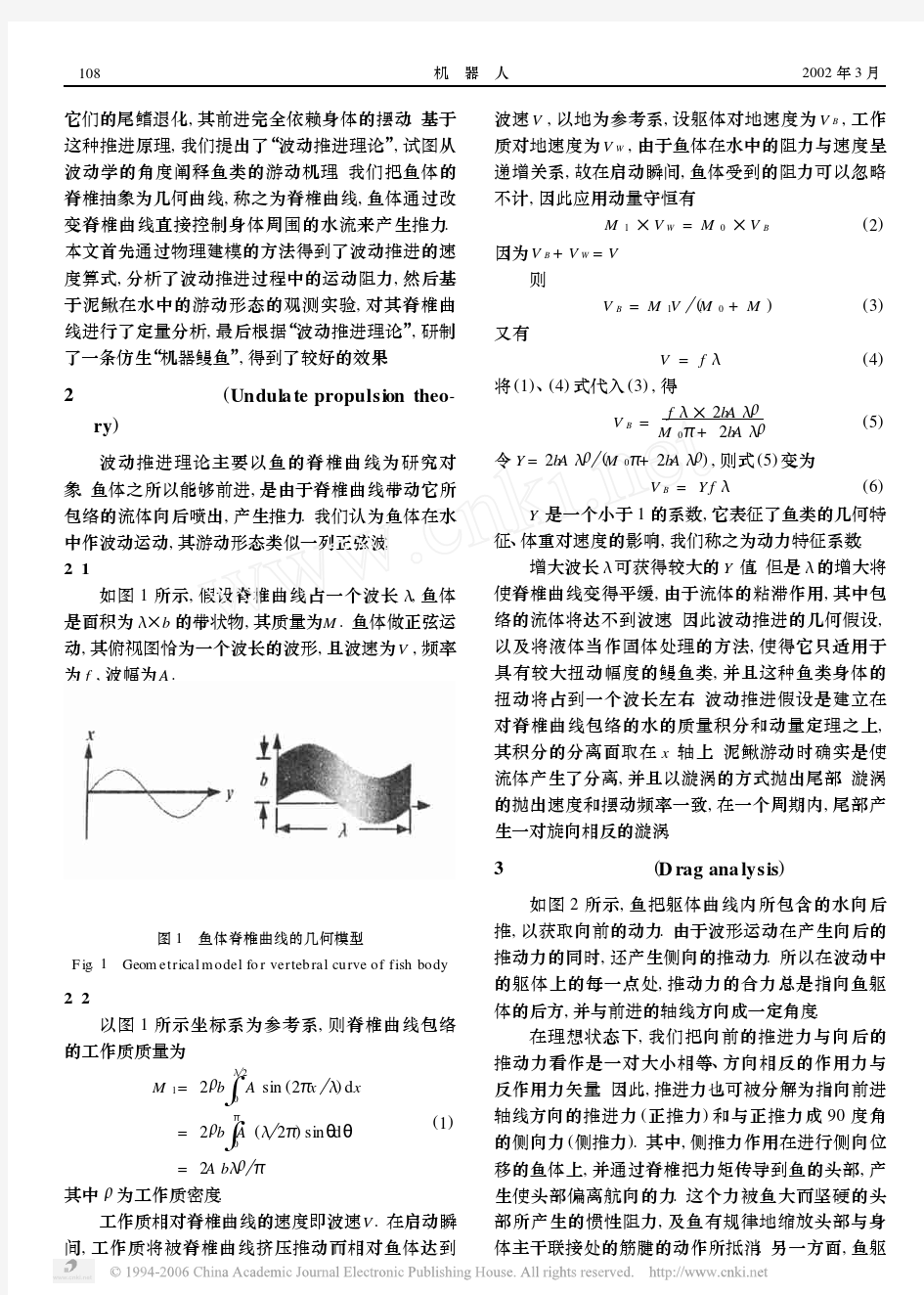
未来奇兵仿生机器鱼 仿生技术的军事应用正在快速发展,各国都投入大量资金深入开展从空中的掌上飞机、地面的微型昆虫到水下的仿生机器鱼等方面的一系列理论和技术研究。其中,水下仿生机器鱼的发展更是如火如荼。 仿生机器鱼是模仿鱼类游动的推动机理,通过机械、电子机构或功能材料(形状记忆合金、人造肌肉等)来模拟鱼类的游动推进动作,在水中利用身体、尾鳍或胸鳍的摆动产生推进波,并作用于身体产生向前推力,从而实现运动的水下航行器。 三种模式 根据推进模式访生机器鱼的推进方式可分为三类:身体波动式,(鱼+参)科及(鱼+参)科加新月形尾鳍模式和胸鳍模式。 身体波动式是模仿鳝鱼等鳗鲡目鱼类的游动方式,整个身体都参与大振幅波动运动,推进波的速度大于鱼的游动速度,并与鱼的游动方向相反地在身体上传播产生推进力。此类仿生机器鱼多采用多关节机构,每个关节安装一个小型伺服电机配合作用进行扭转摆动推进。也可采用形状记忆合金做鱼身,采用电激励或其他形式激励,控制合金的温度变化从而产生形变带动身体摆动。其实人们所熟悉的机器蛇在水中若能浮起就变成了机器鱼。此类机器鱼由于身体细长,柔韧性好,所以机动性极好,但一般只能飘浮,无法进行沉浮。 (鱼+参)科及(鱼+参)科加新月形尾鳍模式是大部分鱼类(如海豚、鲨鱼、金枪鱼等)采用的推进模式。由于身体刚度较大,波动主要集中在身体后部分,推进力主要由具有一定刚度的尾鳍提供,其推进速度和推进效率比身体波动式高。(鱼+参)科模式的推进部分是鱼体的后2/3部分,而(鱼+参)科加新月形尾鳍模式身体刚度更大,推进部分为身体后1/3部分,侧向位移主要产生在后颈部和尾鳍,尾鳍产生90%的推进力,身体前2/3部分保持刚性。目前,(鱼+参)科及(鱼+参)科加新月形屋鳍模式的机器鱼研究较多,可以采用具有一定刚度的材
仿生四足机器人的研究:回顾与展望 摘要:本文侧重于仿生四足机器人。在这一领域的主要挑战是如何设计高动力性和高负载能力的仿生四足机器人。本文首先介绍了仿生四足机器人,尤其是具有里程碑意义的四足机器人的历史。然后回顾了仿生四足机器人驱动模式的现代技术。随后,描述了四足机器人的发展趋势。基于仿生四足机器人的技术现状,简要回顾了四足机器人的技术难点。又介绍了山东大学研制的液压四足机器人。最后是总结和展望未来的四足机器人。 一、导言 代替人类在复杂和危险的环境中工作的移动机器人的需求引起越来越多的关注,如煤矿井下,核电站,以及打击恐怖主义的战争。一般移动机器人可分为三种类型:空中机器人,水下机器人和地面机器人。地面机器人的开发主要是运用轨道或轮子。轮式和履带式机器人可以在平整地面工作,但大多数是无法在凹凸不平的地面上工作。换句话说,现有的地面机器人只能在部分地面工作。与轮式和履带式机器人相比,腿式机器人有可能适应更为广泛的地形,就像如同有腿的动物,几乎可以行走在所有的地形。例如,羚羊具有很强的运动能力,即便在高度复杂的环境中也一样。因此,近些年人们积极地投入腿式机器人的研究中。腿式机器人可以去动物能够到达的地方,应该要构建并运用于实际。尽管机器人技术领域取得了巨大成就,腿式机器人仍然远远落后于它们的仿生学 [1,2]。 基于机械结构,腿式机器人可分为步行机器人和爬行机器人。与爬行动物的机器人相比,步行机器人几乎与躯干垂直的腿被认为更适应载重。步行机器人可以有效地承受更大的载重。具有联合执行机构的步行机器人具有良好的行走速度和运输能力。因此,基于哺乳类动物的仿生机器人的研究已成为机器人领域的重要发展方向。 现已有一、二、三、四甚至更多条腿的腿式机器人。最普遍的是具有高效率步态和稳定性能的偶数条腿的腿式机器人[3]。在腿式机器人中,四足机器人具