EPSON NS80X0 中文操作手冊
內容
第一章操作前的準備
第二章工具列與HMI的主視窗
第三章裝置設定(DEVICE SET)
第四章單元設定(UNIT SET)
第五章維護設定(MAINTENANCE)
第一章操作前的準備
1.1 HMI系統
NS8040系統是建構在Windows2000底下,因此可透過機台的滑鼠去控制機台一些設定及操作.
1.2 啟動HMI系統
當Handler 電源開啟,Windows2000會自動開啟,HMI系統及工具列會自動開起在桌面上. 工具列
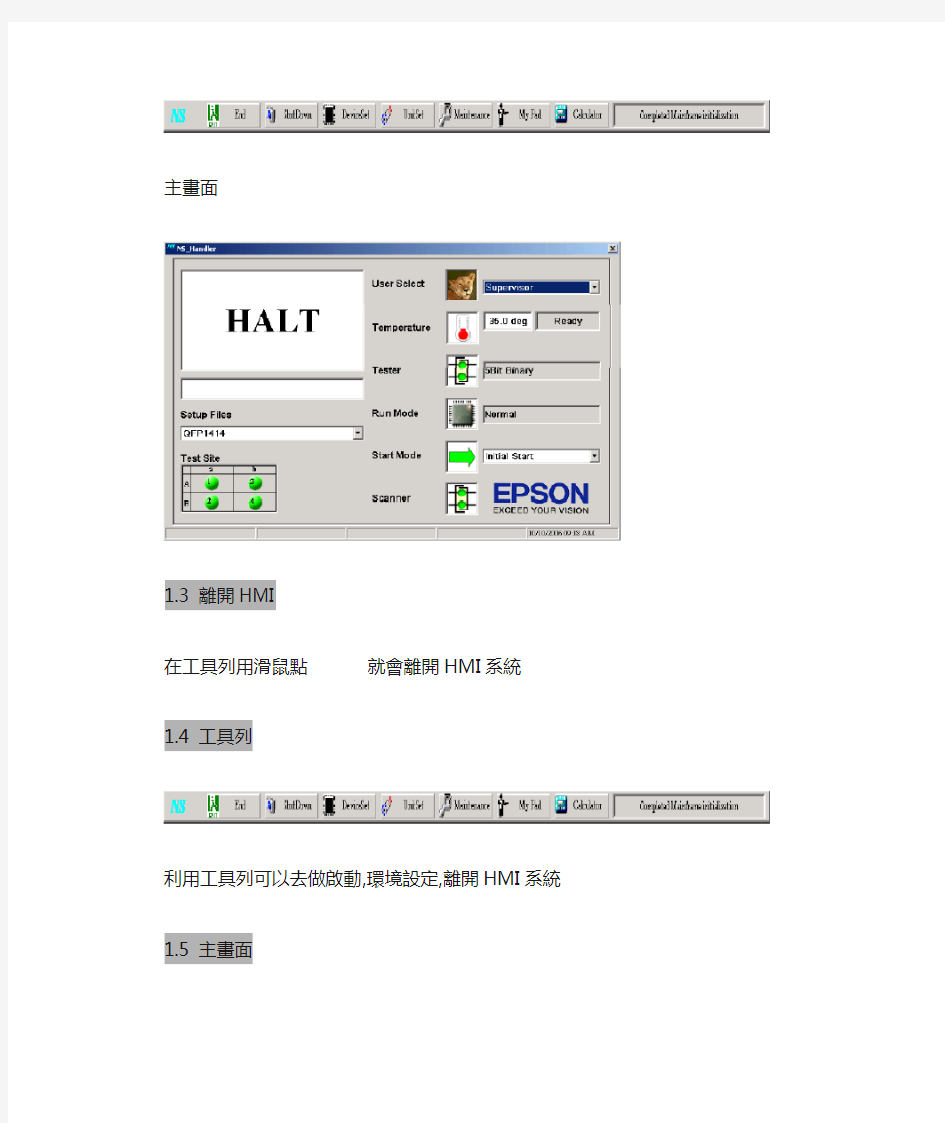
主畫面
1.3 離開HMI
在工具列用滑鼠點
1.4 工具列
利用工具列可以去做啟動,環境設定,離開HMI系統1.5 主畫面
HMI Runing 模式
當HMI在於運作時,Handler不能做任何設定或重制
1.6 選項單
DEVICE 設定(DEVICE SET)
單元設定(UNIT SET)
維護設定(MAINTENANCE)
第二章工具列與MMI的主視窗2.1 工具列
按這樣個鈕,將離開HMI系統.
按這樣個鈕,將離開Windows,離開之前將會出現以下畫面.
按Yes就Shutdown電腦
按Device鈕將出現以下畫面
按UnitSet鈕將出現以下畫面
按Maintenance鈕將出現以下畫面
按Calculator鈕將出現以下計算機畫面
2.2 HMI主畫面
下列狀況將顯示在Status畫面
安全門狀態警告顯示
可依不同使用者去設定權限分三個級別
分為三種模式
第三章裝置設定(DEVICE SET)
按Device鈕將出現以下畫面
3.1 Tray Form
按Tray Form 會產生下圖
在此有三種盤子的型式可以設定(Type1,Type2,Type3),先點選你想要設定的Type,在進行參數的設定.
細部說明如下:
< Apply>:執行變更過的數值.
3.2 Hot Plate Form(加熱盤)
按Plate Form 會產生下圖
規劃加熱盤參數名稱
選擇那一個加熱盤要被使用