第37卷第1期2015年1月机器人ROBOT V ol.37,No.1
Jan.,2015
DOI:10.13973/https://www.doczj.com/doc/8c10521540.html,ki.robot.2015.0122
一种融合全局及显著性区域特征的室内场景识别方法
牛杰1,2,卜雄洙1,钱堃3,李众2
(1.南京理工大学机械工程学院,江苏南京210094;
2.常州信息职业技术学院电子与电气工程学院,江苏常州213164;
3.东南大学自动化学院,江苏南京210096)
摘要:针对常规场景识别方法在室内环境中性能显著下降的问题,提出一种融合全局及显著性区域特征的移动机器人室内场景识别方法.利用改进的BoW(bag-of-words)模型进行室内场景判别的同时,结合视觉注意方法提取出场景图像的最大及次大显著区域,送入改进的BDBN(bilinear deep belief network)模型来自动学习图像特征,进行类别判断.利用分段判别策略对于两个模型的结果进行融合,并输出最终场景判别结果.将本方法应用于实际机器人平台及包含67个类别的MIT室内场景数据库,实验结果表明,相较于常规BoW模型,本方法可以有效提高识别准确率10%以上.此外,本方法在MIT数据库中达到平均44.3%的准确率,优于相关文献算法.关键词:场景识别;深度学习;视觉注意;BoW模型
中图分类号:TP391文献标识码:A文章编号:1002-0446(2015)-01-0122-07 An Indoor Scene Recognition Method Combining Global and Saliency Region Features
NIU Jie1,2,BU Xiongzhu1,QIAN Kun3,LI Zhong2
(1.School of Mechanical Engineering,Nanjing University of Science and Technology,Nanjing210094,China;
2.School of Electrical and Electronic Engineering,Changzhou College of Information Technology,Changzhou213164,China;
3.School of Automation,Southeast University,Nanjing210096,China)
Abstract:Conventional scene recognition methods have poor performance in indoor situations.For this reason,an indoor scene recognition method for mobile robots is presented,combining global and saliency region features.In addition to the use of an improved BoW(Bag-of-Words)model for indoor scene recognition,an improved BDBN(bilinear deep belief network) model is implemented,using information from a salient region detection technique.The?rst and the second winners of the salient region detection with the visual attention approach are sent into the improved BDBN model to automatically learn image features and to judge the class sets they belong to.The?nal result of the indoor scene recognition can be obtained by combining the above-mentioned two models through strategies for a piecewise discriminant.The method is applied to the real mobile robot platform and the standard MIT67-category indoor scene dataset.The experiments show that the proposed method is highly effective,and can improve the accuracy of common BoW-based methods by up to10%.In addition,the accuracy rate of the method can reach44.3%in the MIT dataset,which is superior to some methods in the literature.
Keywords:scene recognition;deep learning;visual attention;BoW model
1引言(Introduction)
自主式移动机器人的一个基本功能是可以自我确定自身在环境中的位置[1],这就要求机器人对所处活动空间具有一定的语义理解能力.理解场景图像内容的核心前提是对于图像的准确表述,早期的场景分类一般都是基于整体模型[2-3]开展,利用颜色、纹理、形状等特征进行识别,该类方法在训练集之外的泛化能力较差.近年来,随着诸如SIFT[4](尺度不变特征变换)、SURF[5](加速鲁棒特征)、HOG[6](梯度方向直方图)等算子的广泛应用,比较流行的分类方法是利用各种算子提取环境特征,继而训练出基准模型进行场景判别,应用最广的是BoW及其改进模型.例如,Lazebnik等[7]提出一种基于BoW模型的空间金字塔架构进行场景识别,Parizi等[8]将图像分割为许多区域,然后利用BoW 模型通过最小二乘支持向量机(LsSVM)进行识别,均取得了良好的识别准确率.此外,也有学者组合不同模型及特征来实现场景判别.Zhao等[9]综合颜色及局部纹理特性,利用单目视觉及自然路标很好地实现了机器人定位任务.Wang等[10]提出
基金项目:国家自然科学基金资助项目(61105094).
通信作者:牛杰,213101000013@https://www.doczj.com/doc/8c10521540.html,收稿/录用/修回:2014-03-17/2014-05-26/2014-07-11
第37卷第1期牛杰,等:一种融合全局及显著性区域特征的室内场景识别方法123
一种结合视觉注意和BoW模型的简单场景分类方法,取得了较好的识别效果,但是上述算法依然仅依赖人工算子进行特征识别.Espinace等[11]提出采取图像分割的方法,利用典型物体来推断场景类别,但是复杂场景环境下的物体分割本身也是个机器视觉难题.Madokoro等[12]提出利用颜色及SIFT 特征算子的无监督室内场景分类方法,在简单环境中达到较高的识别准确率,但却不适合复杂环境应用.
考虑到室内环境对象排列无序、复杂的特点,上述技术用于室内场景识别时都有很多误判现象.这是因为相较于户外场景,室内环境通常缺少显著的局部或全局视觉特征.为了解决该问题,Vasudevan等[13]尝试将语义特征引入到对象识别中,并在简单场景下证明了可行性.Zhu等[14]在场所感知算法基础上,较好地实现了区域感知与2D建图,具有一定的借鉴意义.
本文提出一种融合全局及显著性区域特征的室内场景分类方法.利用改进的BoW模型提取图像全局特征进行分类的同时,创新性地将深度学习及视觉注意思想引入到图像分类任务中以辅助场景识别,并设计了分段判别(piecewise discriminant)策略对于两个模型的识别结果进行有效融合,最终完成室内场景识别任务.
2场景识别算法框架(The frame of scene recognition algorithm)
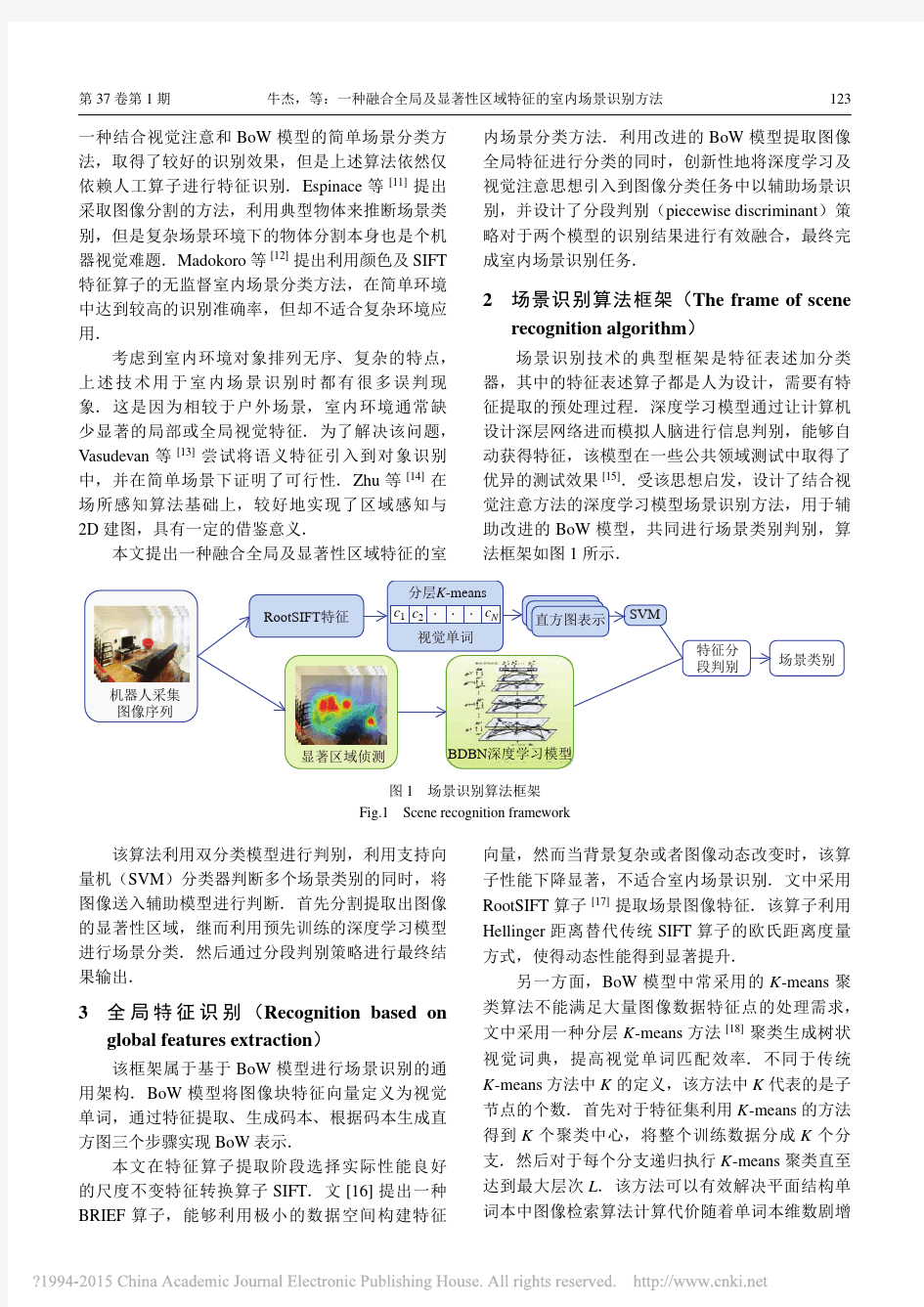
场景识别技术的典型框架是特征表述加分类器,其中的特征表述算子都是人为设计,需要有特征提取的预处理过程.深度学习模型通过让计算机设计深层网络进而模拟人脑进行信息判别,能够自动获得特征,该模型在一些公共领域测试中取得了优异的测试效果[15].受该思想启发,设计了结合视觉注意方法的深度学习模型场景识别方法,用于辅助改进的BoW模型,共同进行场景类别判别,算法框架如图1所示.
???
? ?BDBN? ??
图1场景识别算法框架
Fig.1Scene recognition framework
该算法利用双分类模型进行判别,利用支持向量机(SVM)分类器判断多个场景类别的同时,将图像送入辅助模型进行判断.首先分割提取出图像的显著性区域,继而利用预先训练的深度学习模型进行场景分类.然后通过分段判别策略进行最终结果输出.
3全局特征识别(Recognition based on global features extraction)
该框架属于基于BoW模型进行场景识别的通用架构.BoW模型将图像块特征向量定义为视觉单词,通过特征提取、生成码本、根据码本生成直方图三个步骤实现BoW表示.
本文在特征算子提取阶段选择实际性能良好的尺度不变特征转换算子SIFT.文[16]提出一种BRIEF算子,能够利用极小的数据空间构建特征向量,然而当背景复杂或者图像动态改变时,该算子性能下降显著,不适合室内场景识别.文中采用RootSIFT算子[17]提取场景图像特征.该算子利用Hellinger距离替代传统SIFT算子的欧氏距离度量方式,使得动态性能得到显著提升.
另一方面,BoW模型中常采用的K-means聚类算法不能满足大量图像数据特征点的处理需求,文中采用一种分层K-means方法[18]聚类生成树状视觉词典,提高视觉单词匹配效率.不同于传统K-means方法中K的定义,该方法中K代表的是子节点的个数.首先对于特征集利用K-means的方法得到K个聚类中心,将整个训练数据分成K个分支.然后对于每个分支递归执行K-means聚类直至达到最大层次L.该方法可以有效解决平面结构单词本中图像检索算法计算代价随着单词本维数剧增
124机器人2015年1月
的问题.层次的计算成本由叶节点的数量决定.若
层数为L、每层有K个聚类中心,需要的节点个数
可以通过式(1)进行估算.
L
∑i=1K i=
K L+1?K
K?1
≈K L(1)
对于大量室内场景图像信息特征提取并聚类后,根据码本生成各场景图像的直方图,然后利用RBF(radial basis function)SVM进行离线训练,建立室内典型场景的支持向量机.
4显著区域特征识别(Recognition based on saliency region features extraction)
由于SIFT类特征本质上属于局部特征,在不同环境下差异较大,识别任务初期往往需要场景的大量训练样本用于提取特征.Gehler等[19]实验证明了常见的多种特征算子联合后可以取得比单一算
子更好的效果,这从另一个角度证明了目前人工设计的单一特征算子不够完善.针对上述问题,本文提出一种基于显著性区域特征和深度学习模型的场景图像辅助识别方法.
深度学习是机器学习研究中一个新的领域,其动机在于建立、模拟人脑进行分析学习的神经网络,通过模仿人脑的机制来解释数据.通过逐层构建多层网络使得机器可以自主学习到数据中隐含的特征信息.目前主流的架构包括基于限制玻尔兹曼机(restricted Boltzmann machine,RBM)[20]和基于自编码器(auto-encoder)[21]两种.考虑到RBM的良好性能以及任务中需要的场景识别应用特点,选择对于文[22]提出的基于RBM的BDBN 算法进行优化改进作为本文的深度学习模型算法.BDBN算法是在DBN(deep belief network)算法[20]基础上发展而来.不同于现有的深度学习模型,它利用双线性判别策略来模拟人类对象识别前期的“目的性”猜测,利用贪婪逐层优化算法进行参数训练,最终根据最小错误原则进行全局微调.因此,在适应真实世界的图像分类任务方面,较之同类算法具有一定的优势.一个典型BDBN 框架如图2所示,该框架包含输入层H1,隐藏层H2,···,H N,类别标注层L a.输入层H1有着与输入图像分辨率相同的I×J个元素.类别标注层L a有着与待分类场景类别数量相同的c个元素.场景分类判别的目的就是利用深度结构网络找到原始图像像素集到待分类场景标签的映射关系,或者说是找到最优参数空间θ?.
?
图2BDBN深度学习模型框架
Fig.2Architecture of the bilinear deep belief network
本文对BDBN算法进行了改进.原始算法在所有层训练好后的全局调优(global?ne-tuning)环节,利用式(2)所示的函数公式进行参数调优.
θ?=argmin(?∑
l
y l log?y l)(2)式中y l代表正确的标签类别,?y l代表实际输出标签类别.实际训练过程中,为了改善全局调优步骤,只考虑整体层面特征带来的分层特性参数难以确定的问题,引入多内核学习(multiple kernel learning, MKL)算子[23]代替最小化分类误差方法进行最优参数确定.MKL是当下核机器学习领域的热点,它解决了利用单核映射方式处理复杂样本空间时的不合理问题.文中采用ultra-fast online MKL多核学习方法[24],正则化函数如式(3)所示,利用BDBN 每层特征进行优化分类.
?(?):=
λ
2
∥?∥2
2,2log F
2log F?1
+α∥?∥
2,1
(3)式中?是链接权重,λ是正则项系数,F是核的数量.α是调节系数.文中将核数量设计为BDBN的层数,用BDBN模型的每层特征代替多核学习算法中的核函数.在实验过程中,为了节省MKL运算时间,在得到每层特征的权重后,只选取权重值占整体权值前85%的层参与计算分类.模型能够仅根据核的数量达到最优收敛速率.
第37卷第1期牛杰,等:一种融合全局及显著性区域特征的室内场景识别方法125
另外,由于输入选定为图像像素点像素值,考虑不同室内场景图像中一般存在大量的相似非典型物体所带来的误匹配问题[25],引入文[26]中经典的GBVS (graph-based visual saliency )视觉注意算法来筛选提取场景中的显著区域以突显特征,降低BDBN 模型的训练难度.GBVS 算法考虑图像的颜色、亮度、方向3个要素,首先建立输入图像的9层高斯金字塔,对于每一层分别提取3个要素的特征形成特征金字塔,然后在不同尺度空间上对于特征金字塔做差,形成中心–外周特征后引入马尔可夫链方法计算显著值.算法输出示例图像如图3所
示.
(a)
(b)
(c)
(d)
图3GBVS 显著性区域分割效果
Fig.3
Saliency region segmentation based on GBVS
图3(a)是一幅室内盥洗室场景原始图片,(b)是通过GBVS 算法得出的显著性图,(c)是将显著图叠加到原始图像上的效果图,(d)是阀值为0.85情况下分割出的显著性区域.根据显著图可以看到,该场景中马桶和手纸筒具有较高的显著特征.选取合适熵阈值分解出多个显著区域,根据显著度大小提取出其中最大和次大显著图像,通过处理将图像大小统一设置为32×32,送入训练后的BDBN 模型即可进行基于显著目标的场景类别判断.
5
分段判别策略(Strategies for a piecewise discriminant )
在得到全局BoW 模型识别(简称global BoW )和基于视觉注意的深度学习模型(简称saliency DL )输出结果后,机器人实际位置所在场景由两者共同决定.文中设计了一种特征分段判别策略进行结果融合.具体步骤如下:
(1)若global BoW 和saliency DL 中最大显著区域图像检测判别一致,则输出场景检测结果,读取下一关键帧图像.
(2)若global BoW 和saliency DL 中最大显著区域图像检测判别结果不一致,则需考虑下列情况:
a)若当前帧global BoW 识别场景结果与上一关键帧global BoW 识别结果不同,则以当前帧global BoW 结果为准,输出检测结果,读取下一关键帧图像进行判别.
b)若当前帧global BoW 识别场景结果与上一关键帧global BoW 识别结果相同,则需考虑场景显著区域误重叠问题,需要对于saliency DL 结果进行进一步判断,即考虑saliency DL 中次大显著图像的判别结果.如果次大显著图像的场景输出结果与global BoW 一致,输出该一致检测结果;否则,丢弃该帧,读取下一关键帧图像进行判别.
6
实验结果(Experimental results )
实验系统采用图4所示美国NI 公司DaNI 机器人平台,该平台底层利用NI sbRIO-9632嵌入式控制器采集超声波传感器、编码器信号以及进行运动控制.上层硬件采用八核2.2GHz ,8G 内存笔记本电脑,通过2个思科WRT54G 无线路由器桥接通讯进行图像采集处理及运动算法设计.硬件系统框图如图5所示.
1
2
2
图4DaNI 机器人实物图
Fig.4The photo of the real DaNI robot
实验中将室内场景分为客厅、卫生间、卧室、厨房、书房5个类别.模型训练过程中,人工控制机器人运动,不同光照度条件下,以15帧/秒的频率采集视频图像,图像大小320×240.最终选取400幅图像,每个场景80幅用于全局及显著区域特征模型训练.部分场景图像如图6所示.
126机器人2015年1
月 ? ?
?
???
???
?
傡
? ? ??
??
? ㄟ
?
???
图5硬件系统框图
Fig.5The framework of the hardware
system
图6部分场景图像
Fig.6Parts of scene images
全局模型首先从所有图像中利用RootSIFT提
取约1Mb特征,继而利用分层K-means算法进行
特征聚类,聚类参数L=3,K=8.根据码本生
成直方图后,利用核参数C=8、γ=0.001953的
RBF-SVM进行分类训练.显著区域特征模型首先
根据不同数量的标准标注图像(已知场景类别的
训练数据),利用GBVS算法提取显著区域,然后
根据阈值分解区域图像并处理成32×32大小,送
入深度模型进行训练.BDBN深度模型输入层H1
包含神经元数量等于输入图像像素数32×32,其他
隐层H2、H3、H4所含神经元数量分别为24×24、
21×21、19×20,模型最大迭代次数50.MKL调节
系数α=0.0025,链接权重?、正则化系数λ及学
习速率等运行参数值与文[24]实验部分配置相同.
BDBN模型训练完成后,机器人自主运行过程
中,每隔5s读取当前实时采集图像作为关键帧进
行场景判别.为了详细描述方法流程及性能指标,
在实验过程中,本文从全局特征的BoW模型改进
方面、从深度学习模型选择方面以及从整体框架性
能方面分别加以比较.
图7所示为室内厨房环境中,使用不同特征
算子的场景识别正确率对比结果:RootSIFT达到
90%以上的准确率,表现最好;SIFT特征次之;
BRIEF特征表现最差,原因是由于机器人运动过
程引起的特征物体方位及大小的动态变化.
?
↓
?
?
/
(
%
)
105
? ?? ? /s
图7使用不同特征算子的厨房场景识别准确率比较
Fig.7Comparison of accuracy rate of different feature
descriptors for kitchen scene data
另一方面,考虑不同特征算子在场景识别时
的特征匹配所需时间.SIFT和RootSIFT时间相
仿,而BRIEF由于算子本身特性,时间仅为前者的
1/40.在简单环境条件下,可以有选择地考虑使用,
以减少匹配时间.
表1不同特征算子在场景识别中的平均运行时间
Tab.1Average runtime of different feature descriptors for
scene recognition
特征算子时间/s
SIFT0.32
RootSIFT0.41
BRIEF0.01
实验过程中发现,BDBN深度学习模型由于其
特征自学习的特性,前期要求确保足够数量的样
本图片进行训练.室内环境下,由于机器人运动的
复杂性,导致单个场景用于模型训练的图像数量
远小于实际运行时采集的图像数量.为了提高模型
性能,引入视觉注意模型,提取显著区域后再送入
深度模型进行训练.表2为在室内场景环境下,使
用KNN(K-nearest neighbor)[27]、DDBN(discrimi-
native deep belief network)[28]、DCNN(deep convo-
lutional neural network)[29]等不同模型、不同数量
的已知类别标准标注数据进行训练的对比结果,参
考方法均使用SVM分类器.根据结果,首先可以
看出BDBN相较同类算法体现出较好的检测性能.
其次,加入MKL算子后可以将BDBN方法效果提
升约3%,具有实际意义.第三,对于标准标注图
像加入显著区域提取步骤后,在不改变图像数量的
第37卷第1期牛杰,等:一种融合全局及显著性区域特征的室内场景识别方法127
前提下,能够进一步提升训练的效率,提高识别准确率.
表2不同标注数的模型识别准确率比较
Tab.2Comparisons of recognition accuracy rate of models
with different number of labeled data
20
406080KNN 3345.848.549.6DDBN 40.548.751.252.9DCNN 43.249.250.953.4BDBN 48.551.453.554.3BDBN+MKL 50.553.857.258.6Saliency+BDBN
65.4
70.6
72.8
75
最后,利用特征分段判别策略,融合全局及显
著性区域特征结果,得到最终识别结果,如图8所示.根据实验结果可以看出本文方法在各个场景识别正确率上面都领先于BoW 及其改进模型.另外,本文还尝试仅采用单一的BDBN 算法进行了场景识别,利用实验中较少的训练样本数,准确率也能保持在50%以上.加上视觉注意缩小训练范围后,准确率逼近BoW
模型结果.
100908580757065605550
? ↓?? /(%)
图8场景识别准确率比较
Fig.8
Comparisons of recognition accuracy for scene
recognition
为了进一步验证算法性能,选取MIT 室内场景数据库[30]进行算法效果测试.该图像库是目前最大的公共室内场景数据库,包含卧室、书房、走廊、酒吧等67个室内场景共计15620幅图像.测试数据设置按照文[30]的做法每种类别选择80幅图像进行训练,20幅图像用于检测.加入与本文参数相同的SVM 分类器,选取SP-BoW [7]、R-BoW [8]方法与本文全局和显著性模型判别一致的情况进行
对比,同时选取文[30]、文[31]方法作为参照,部分场景识别正确率结果如表3所示.
表3不同方法的场景识别结果
Tab.3The scene recognition results for different methods
H H H H H H
方法场景
bathroom bedroom closet cloister of?ce SP-BoW 38.514.5
37.6
43.40
R-BoW 41.328.952.150.5
18.5文[30]33.314.338.9450文[31]45.327.753.854.225.2本文方法
47
27.6
54.2
58.7
23.5
本文方法在所有类别上的平均识别准确率达到了44.3%,高于文[30]的25%、SP-BoW 的32.4%、R-BoW 的38.9%,略高于文[31]的42.9%.实验结果表明了在室内环境中引入基于显著性的深度学习模型方法的意义,说明了本文方法识别效果上的优越性.
7结论(Conclusion )
针对多数常规特征提取算子在室外环境表现良好、在室内环境性能下降的问题,提出一种融合全局及显著区域特征的场景识别框架方法.该方法结合改进的BoW 模型,从整个场景图像层面进行类别判断.同时,引入视觉注意思想结合深度学习模型检测作为最终判别的辅助模型.利用特征分段判别策略融合两者结果得到最终场景类别.上述方法优点是:(1)利用RootSIFT 及分层K -means 方法在保证实时性的情况下提升了BoW 模型识别正确率.(2)不同于BoW 模型中通常采用的SIFT 等单一人工特征,BDBN 深度学习算法模型不需要指定具体特征提取方法,所有的特征都由模型自动学习提取,该种机制更加符合人类认知习惯.本文方法在移动机器人平台及已知的最大公共室内场景数据库中的实验结果表明,相较于其他常规场景识别算法,该方法可以显著提高场景识别正确率.
参考文献(References )
[1]Thrun S,Burgard W,Fox D.Probabilistic robotics[M].Cam-bridge,USA:MIT,2005.
[2]
Vailaya A,Jain A,Zhang H J.On image classi?cation:City https://www.doczj.com/doc/8c10521540.html,ndscape[C]//IEEE Workshop on Content-Based Access of Image and Video Libraries.Piscataway,USA:IEEE,1998:3-8.[3]
Chang E,Goh K,Sychay G,et al.CBSA:Content-based soft an-notation for multimodal image retrieval using Bayes point ma-chines[J].IEEE Transactions on Circuits and Systems for Video Technology,2003,13(1):26-38.
[4]
钱堃,马旭东,戴先中,等.基于层次化SLAM 的未知环境级联地图创建方法[J].机器人,2011,33(6):736-741.
128机器人2015年1月
Qian K,Ma X D,Dai X Z,et al.A layered SLAM based ap-
proach for unknown environment hierarchical mapping build-
ing[J].Robot,2011,33(6):736-741.
[5]包加桐,宋爱国,郭晏,等.基于SURF特征跟踪的动态
手势识别算法[J].机器人,2011,33(4):482-489.
Bao J T,Song A G,Guo Y,et al.Dynamic hand gesture recogni-
tion based on SURF tracking[J].Robot,2011,33(4):482-489.
[6]Zhang H B,Su S Z,Li S Z,et al.Seeing actions through scene
context[C]//IEEE International Conference on Visual Commu-
nications and Image Processing.Piscataway,USA:IEEE,2013:
1-6.
[7]Lazebnik S,Schmid C,Ponce J.Beyond bags of features:
Spatial pyramid matching for recognizing natural scene cat-
egories[C]//IEEE Computer Society Conference on Computer
Vision and Pattern Recognition.Piscataway,USA:IEEE,2006:
2169-2178.
[8]Parizi S N,Oberlin J G,Felzenszwalb P F.Recon?gurable mod-
els for scene recognition[C]//2012IEEE Conference on Com-
puter Vision and Pattern Recognition.Piscataway,USA:IEEE,
2012:2775-2782.
[9]Zhao Z S,Feng X,Wei F,et al.Learning representative fea-
tures for robot topological localization[J].International Journal
of Advanced Robotic Systems,2013,10:1-12.
[10]Wang R,Wang Z L,Ma X R.Indoor scene classi?cation based
on the bag-of-words model of local feature information gain[J].
IEICE Transactions on Information and Systems,2013,96(4):
984-987.
[11]Espinace P,Kollar T,Soto A,et al.Indoor scene recognition
through object detection[C]//2010IEEE International Confer-
ence on Robotics and Automation.Piscataway,USA:IEEE,
2010:1406-1413.
[12]Madokoro H,Yamanashi A,Sato K.Unsupervised semantic in-
door scene classi?cation for robot vision based on context of
features using Gist and HSV-SIFT[J].Pattern Recognition in
Physics,2013,1(1):93-103.
[13]Vasudevan S,Siegwart R.Bayesian space conceptualization and
place classi?cation for semantic maps in mobile robotics[J].
Robotics and Autonomous Systems,2008,56(6):522-537. [14]朱博,戴先中,李新德,等.基于“原型”的机器人开
放式室内场所感知实验研究[J].机器人,2013,35(4):491-499,512.
Zhu B,Dai X Z,Li X D,et al.Experimental study on open
interior-places perception of robot based on“prototype”[J].
Robot,2013,35(4):491-499,512.
[15]Bengio Y.Deep learning of representations:Looking for-
ward[C]//1st International Conference on LSP,V ol.7978.
Berlin,German:Springer,2013:1-37.
[16]Calonder M,Lepetit V,Strecha C,et al.Brief:Binary robust in-
dependent elementary features[C]//11th European Conference
on Computer Vision,V ol.6314.Berlin,German:Springer,
2010:778-792.
[17]Arandjelovic R,Zisserman A.Three things everyone should
know to improve object retrieval[C]//IEEE Conference on Com-
puter Vision and Pattern Recognition.Piscataway,USA:IEEE,
2012:2911-2918.[18]Nister D,Stewenius H.Scalable recognition with a vocabulary
tree[C]//IEEE Computer Society Conference on Computer Vi-sion and Pattern Recognition.Piscataway,USA:IEEE,2006: 2161-2168.
[19]Gehler P,Nowozin S.On feature combination for multiclass
object classi?cation[C]//12th International Conference on Com-puter Vision.Piscataway,USA:IEEE,2009:221-228.
[20]Hinton G E,Osinder O S,Teh Y W.A fast learning algorithm
for deep belief nets[J].Neural Computation,2006,18(7):1527-1554.
[21]Rifai S,Mesnil G,Vincent P,et al.Higher order contrac-
tive auto-encoder[C]//European Conference on ECML PKDD, V ol.6912.Berlin,German:Springer,2011:645-660.
[22]Zhong S H,Liu Y,Liu Y.Bilinear deep learning for image clas-
si?cation[C]//19th ACM International Conference on Multime-dia.New York,USA:ACM,2011:343-352.
[23]Lee J,Lim J H,Choi H,et al.Multiple kernel learning with
hierarchical feature representations[C]//20th International Con-ference on Neural Information Processing.Berlin,German: Springer,2013:517-524.
[24]Orabona F,Jie L.Ultra-fast optimization algorithm for sparse
multi kernel learning[C]//28th International Conference on Ma-chine Learning.Washington,USA:IMLS,2011.
[25]Shrivastava A,Mmlisiewicz T,Gupta A,et al.Data-driven visu-
al similarity for cross-domain image matching[C]//SIGGRAPH Asia Conference.New York,USA:ACM,2011:154:1-154:10.
[26]Harel J,Koch C,Perona P.Graph-based visual saliency[C]//Ad-
vances in Neural Information Processing Systems.Cambridge, USA:MIT,2006:545-552.
[27]Altman N S.An introduction to kernel and nearest-neighbor
nonparametric regression[J].The American Statistician,1992, 46(3):175-185.
[28]Zhou S S,Chen Q C,Wang X L.Discriminate deep belief net-
works for image classi?cation[C]//17th IEEE International Con-ference on Image Processing.Piscataway,USA:IEEE,2010: 1561-1564.
[29]Jarrett K,Kavukcuoglu K,Ranzato M,et al.What is the best
multi-stage architecture for object recognition?[C]//12th Inter-national Conference on Proceedings of the Computer Vision.
Piscataway,USA:IEEE,2009:2146-2153
[30]Quattoni A,Torralba A.Recognizing indoor scenes[C]//IEEE
Conference on Computer Vision and Pattern Recognition.Pis-cataway,USA:IEEE,2009:413-420.
[31]Zhou L,Zhou Z,Hu D.Scene classi?cation using multi-
resolution low-level feature combination[J].Neurocomputing, 2013,122:284-297.
作者简介:
牛杰(1983–),男,博士生,讲师,研究领域:机器视觉,智能机器人及应用.
卜雄洙(1963–),男,博士,教授,博士生导师,研究领域:智能测控系统,机器视觉.
钱堃(1982–),男,博士,讲师,研究领域:服务机器人导航,人机交互.
1、区域市场规划 每个市场都有长期发展积累的独特运行规律,刚到一个陌生的市场,首先要运用营销工具对整体区域进行定性诊断,掌握市场总体气质,准确市场分类可以有助于把握正确的调研方向,迅速了解市场,“快鱼吃慢鱼”,方向对了,速度效率就不是问题。 2、区域调研要素 利用上面营销工具首先把脉市场特质,确认市场级别,研究市场竞争激烈程度,大致划分市场竞争格局,但是具体准确把握市场还必须深入一线市场,从内外因素、动静态势分析,具体上从宏观环境、竞争状况、企业环境、市场状况放四个方面分别调研,实事求是,掌握准确市场资料。
3、运用工作方法 二、系统科学调查 1、宏观环境 宏观环境对区域市场影响重大,宏观环境主要包括地理环境、人口数量、行政规划、人口密度、气候特征、经济投资环境等,通过宏观环境了解可以评估区域市场容量,同时参照产品定位运用相应的营销手段。区域市场容量的准确评估有助于向公司争取更多的市场资源,也增强争取支持的依据,可以高屋建瓴地指导区域经销商市场拓展。 了解宏观市场可以通过网络搜索区域行政资料,密切关注当地经济动向,购买经济类或者主流媒体杂志报纸,大量阅读当地媒体信息,注意观察分析消费水平及房地产投资状况。 3、企业环境 区域经理下市场前必须与总部职能部门深度沟通,通过市场部可以准确把握区域市场的战略地位、区域资源配置状况及广告投放计划;通过销售部深入部门与职能经理了解区域客户资信情况,详细了解当地客户数量及质量,掌握不同区域销售波动及全年市场动态,特别对于负责直接客户沟通的客户代表更应深度交谈,通过客户代表了解客户更具体的月度、季度销售状况,甚至可以从客户代表了解到区域市场客户实力、性格、特征等,同时也可以
数据融合方法 随着交通运行状态评价研究的不断发展,对数据的准确性和广泛覆盖性提出了更高的要求,在此基础上,不同的数据融合模型被引进应用于交通领域中来计算不同检测设备检测到的数据。现阶段,比较常用的数据融合方法主要有:表决法、模糊衰退、贝叶斯汇集技术、BP神经网络、卡尔曼滤波法、D.S理论等方法。 1现有方法应用范围 结合数据融合层次的划分,对数据融合方法在智能交通领域的应用作以下归纳总结: 表数据融合层次及对应的方法 2各种融合方法的优缺点 主要指各种融合方法的理论、应用原理等的不同,呈现出不同的特性。从理论成熟度、运算量、通用性和应用难度四个方面进行优缺点的比较分析,具体内容如下: (1)理论成熟度方面:卡尔曼滤波、贝叶斯方法、神经网络和模糊逻辑的理论已经基本趋于成熟;D—S证据推理在合成规则的合理性方
面还存有异议;表决法的理论还处于逐步完善阶段。 (2)运算量方面:运算量较大的有贝叶斯方法、D.S证据推理和神经网络,其中贝叶斯方法会因保证系统的相关性和一致性,在系统增加或删除一个规则时,需要重新计算所有概率,运算量大;D.S证据推理的运算量呈指数增长,神经网络的运算量随着输入维数和隐层神经元个数的增加而增长;运算量适中的有卡尔曼滤波、模糊逻辑和表决法。 (3)通用性方面:在这六种方法中,通用性较差的是表决法,因为表决法为了迁就原来产生的框架,会割舍具体领域的知识,造成其通用性较差;其他五种方法的通用性相对较强。 (4)应用难度方面:应用难度较高的有神经网络、模糊逻辑和表决法,因为它们均是模拟人的思维过程,需要较强的理论基础;D.S证据推理的应用难度适中,因其合成规则的难易而定:卡尔曼滤波和贝叶斯方法应用难度较低。 3 适用的交通管理事件 之前数据融合技术在交通领域中的应用多是在例如车辆定位、交通事件识别、交通事件预测等交通事件中,但是几乎没有数据融合技术在交通运行状态评价的应用研究,而本文将数据融合技术应用在交通运行状态评价中,为了寻找到最适用于交通运行状态评价的数据融合技术方法,有必要将之前适用于其它交通管理事件的数据融合技术进行评价比较。 表2 各种融合方法适用的交通管理事件的比较
2012高考地理区域地图的一般分析方法 1.区域定位 依据经纬度、区域轮廓、地理事物的特征、地理景观等定位方法,确定区域位置,描述其位置特征,如海陆位置、相对位置、交通地理位置、经济地理位置等。 (1)绝对位置——经纬度位置(区域范围,确定一个具体地点)。(2)相对位置 海陆位置:根据岛屿、半岛、大陆东西岸等判断区域。 山河位置:根据山脉分布、走向,河流水系形状、流向判断区域。 政治地理位置:根据国家或区域轮廓,邻国、邻省轮廓判断区域。 交通地理位置:根据交通运输的主要方式及交通运输网中线、点的分布判断区域。 2.分析区域特征 根据所确定的区域及图中信息提炼出构成该区域地理环境的自然地 理要素(地形、气候、水文、植被、土壤、自然资源等)和人文地理要素(农业、工业、交通、城市等)的特征。其一般方法:①通过对图中等高线、河流流向、等温线的判读,或者根据经纬度判断图示区域的地形特征; ②通过经纬度与海陆位置,结合气候分布一般规律,判断该区域的气候类型及其特征;③在了解该区域的地形、气候特征的基础上,判断该区域的水文、植被、土壤、自然资源等自然地理要素的特征;④通过对各自然地理要素特征的了解,进一步判断该区域的人文地理要素特征,如工农业生产特点,人口、城市的分布特点,交通特点及形成这些特点的
有利自然条件。 (1)自然地理特征分析主要从以下几个方面进行: ①地形:主要从地形类型、特征、地质作用、地质灾害等方面分析。 地形类型与名称:可以根据区域位置判断,还可根据等高线的分布、河流流向、海拔及地形剖面图判断。 地形特征:主要从地形类型、海拔、地面起伏状况(即地势)、地形分布等方面分析。 地势特征:主要根据地面起伏变化趋势来描述,如西高东低或由西向东倾斜。 地质作用:包括内力作用和外力作用。外力作用在地面起伏大的高原山地主要是侵蚀作用,在低平的地区主要是堆积作用,在降水多的区域(湿润、半湿润地区)主要是流水作用,在降水少的区域(干旱、半干旱地区)主要是风力作用。 地质灾害:主要是指地震、火山、滑坡、泥石流等。 ②气候:可从气候类型、气候要素的分布,影响气候的因素,气候对动植物和河流的影响,气候与农业生产的关系等方面分析,现主要介绍前两个方面。 气候类型:根据经纬度和海陆位置判断气候类型。 气候要素的分布:主要是指气温和降水的分布。主要包括两种情况:第一种是大区域气候要素的分布,即其气候特征;第二种是局部地区气候
区域地理特征的描述方法 一、区域地理特征分析的基本方法可以概括为 进行区域定位——根据区域位置,判断分析地形、气候的类型和特征——以地形、气候条件为基础,确定其相应的水文、植被、土壤等自然地理要素的特征——以自然地理特征为条件,分析自然地理特征对主要人文地理现象的影响。 分析评价区域发展的主要优势条件和限制性因素——确定区域发展方向、主要问题及其解决措施。 二、区域的自然地理特征
1、地理位置特征:绝对位置(半球位置、经纬度位置),相对位置(海陆位置、政治、经济地理位置等) 2、地形特点描述:①主要地形类型②地势特点(起伏大小、倾斜方向)③典型地形区分布,延伸方向④特殊地形地貌⑤常见地质灾害⑥海岸线特征(长短、曲直) 3、区域气候特点描述:①气候类型和气候分布②气温特点(冬夏气温高低、气温季节变化,温差大小、温度带)③降水特点(降水总量、降水空间分布和季节变化、水热配合情
况、干湿状况)④光照状况⑤气象灾害 如中国南方地区气候特点:①气候类型以亚热带季风为主,热带季风气候面积小②冬季温和少雨,夏季高温多雨,雨热同期③雨季长雨量大,夏秋季节多台风,地处湿润区,年降水量800毫米以上。 4、河流水系水文特点 水系特点:①河流长度、流向②流域面积大或小③支流多或少④河网密度、⑤落差大小或峡谷数量分布⑥河道弯曲还是平直(例如长江上游水系特点:落差大,多峡谷,支流多,
金沙江段自北向南流,流域面积小;川江段自西向东流,流域面积较大)分析金沙江段流域面积小的原因:因为流经地区河谷狭小,汇水面积小所以流域面积狭小。 水文特点:①流量大小、②流速③水位季节变化大小、汛期长短、汛期出现在哪个季节④含沙量大小、⑤有无结冰期及其长短、有无凌汛⑥水能⑦航运价值的大小。 5.植被、土壤特征 植被:①类型②水平分布规律③垂直地域分异是否显著 土壤:①类型②分布③特点 6.自然资源:
一、背景介绍: 多传感器数据融合是一种信号处理、辨识方法,可以与神经网络、小波变换、kalman 滤波技术结合进一步得到研究需要的更纯净的有用信号。 多传感器数据融合涉及到多方面的理论和技术,如信号处理、估计理论、不确定性理论、最优化理论、模式识别、神经网络和人工智能等。多传感器数据融合比较确切的定义可概括为:充分利用不同时间与空间的多传感器数据资源,采用计算机技术对按时间序列获得的多传感器观测数据,在一定准则下进行分析、综合、支配和使用,获得对被测对象的一致性解释与描述,进而实现相应的决策和估计,使系统获得比它的各组成部分更充分的信息。 多传感器信息融合技术通过对多个传感器获得的信息进行协调、组合、互补来克服单个传感器的不确定和局限性,并提高系统的有效性能,进而得出比单一传感器测量值更为精确的结果。数据融合就是将来自多个传感器或多源的信息在一定准则下加以自动分析、综合以完成所需的决策和估计任务而进行的信息处理过程。当系统中单个传感器不能提供足够的准确度和可靠性时就采用多传感器数据融合。数据融合技术扩展了时空覆盖范围,改善了系统的可靠性,对目标或事件的确认增加了可信度,减少了信息的模糊性,这是任何单个传感器做不到的。 实践证明:与单传感器系统相比,运用多传感器数据融合技术在解决探测、跟踪和目标识别等问题方面,能够增强系统生存能力,提高整个系统的可靠性和鲁棒性,增强数据的可信度,并提高精度,扩展整个系统的时间、空间覆盖率,增加系统的实时性和信息利用率等。信号级融合方法最简单、最直观方法是加权平均法,该方法将一组传感器提供的冗余信息进行加权平均,结果作为融合值,该方法是一种直接对数据源进行操作的方法。卡尔曼滤波主要用于融合低层次实时动态多传感器冗余数据。该方法用测量模型的统计特性递推,决定统计意义下的最优融合和数据估计。 多传感器数据融合虽然未形成完整的理论体系和有效的融合算法,但在不少应用领域根据各自的具体应用背景,已经提出了许多成熟并且有效的融合方法。多传感器数据融合的常用方法基本上可概括为随机和人工智能两大类,随机类方法有加权平均法、卡尔曼滤波法、多贝叶斯估计法、产生式规则等;而人工智能类则有模糊逻辑理论、神经网络、粗集理论、专家系统等。可以预见,神经网络和人工智能等新概念、新技术在多传感器数据融合中将起到越来越重要的作用。 数据融合存在的问题 (1)尚未建立统一的融合理论和有效广义融合模型及算法; (2)对数据融合的具体方法的研究尚处于初步阶段; (3)还没有很好解决融合系统中的容错性或鲁棒性问题; (4)关联的二义性是数据融合中的主要障碍; (5)数据融合系统的设计还存在许多实际问题。 二、算法介绍: 2.1多传感器数据自适应加权融合估计算法: 设有n 个传感器对某一对象进行测量,如图1 所示,对于不同的传感器都有各自不同的加权因子,我们的思想是在总均方误差最小这一最优条件下,根据各个传感器所得到的测量值以自适应的方式寻找各个传感器所对应的最优加权因子,使融合后的X值达到最优。
区域分析与区域规划(第二版)课后答案 U1绪论 1、谈谈自己对区域概念的理解,简述区域的类型及其划分方法。 答:区域的概念:区域是一个空间概念,是地球表面上占有一定空间的,以不同物质与非物质客体为对象的区域结构形式。 区域的类型及其划分方法: ○1区域的概念划分:均质区、结节区○2区域的特性划分:整体性、结构性、动态性 2、我国当前区域发展面临的主要问题有哪些? 答:区域差距、发展与资源、地区间恶性竞争、区域合作不完善。 3、区域分析的主要内容是什么?试结合你自己熟悉区域举例说明。 答:(1)区域发展条件分析(自然、社会) (2)发展状况及存在的问题(经济分析)经济水平、阶段、产业结构 (3)发展方向机策略研究 4、谈谈你对区域发展、区域研究、区域科学三个概念及其间关系的认识。 答:区域发展是指一定时空范围内所进行的以资源开发、产业组织和结构优化为中心的一系列经济社会活动。 区域研究是以综合、全面的把握或理解某一特定区域的人类团体所创造的政治经济社会文化系统为目的的。他把区域作为复合系统来研究,在一定时间空间范围内整体的把握研究对象。 区域科学是用各种近代计量分析和传统区位分析相结合的方法,由区域或空间的诸要素及其组合所形成的差异和变化的分析入手,对不同等级和类型区域的社会经济发展等问题进行研究的应用学科。 关系:相互依存、互为因果、不可分割。区域发展是以人为主体,一协调区域内部和区域之间人地关系为目的,并最终为人类提供良好生存环境的一系列经济社会活动,具有目的性无限性可持续性。区域研究是源于对区域经济社会发展问题的探讨,是区域不断持续快速发展,人类社会不断进步所提出的客观要求。区域科学是一门研究人类活动区域的跨学科新兴科学,目的是探索一条更加科学的方法来开展区域研究,为区域发展及区域分析等提供可靠的理论基础。 U2区域发展的资源环境基础分析 1、简述生态环境与区域发展的关系 答:自然环境极其变迁对人类经济社会发展具有重要的影响,同时也对人类文化产生着重大的影响,他是文化存在和发展的物质条件,生态环境问题也会制约区域的发展,区域发展是生态环境保护的前提。区域发展是生态环境保护的前提。改善生态环境是为了更好地促进区域发展,同时,区域发展也应该是建立在保护生态环境基础上的可持续发展。 2、什么是生态环境质量?简述生态环境质量评价的内容与方法。 答:(1)生态环境质量:是指在一个具体的时间和空间范围内生态系统的总体或部分生态因子的组合体对人类的生存及社会经济持续发展的适宜程度。
《考试地图》P68~89或《中学地理图文详解指导地图册》P95~131 一、东亚 1.朝鲜半岛(中朝边界)的 区域框图 考查内容:①中朝界 河,②重要的地形区,③沿38°N 纬线的地形剖面图,④重要的城市与港口,⑤相关的历史事件(热点问题),⑥周边的海洋,⑦河流流向与地势的关系。 2.朝鲜海峡(对马海峡)的区域框图 考查内容、①区域内国家 (韩、日)的经济特征,②海峡 与岛屿,③区域内气候特征, ④重要的港口。 3.日本濑户内海区域框图 考查内容:①海域名称, ②区域内重要城市与工业区的 分布及成因,③地壳活动频繁的 原因,④日本自然资源与经济特 征,⑤日本文字的创造与唐文化 的联系,⑥遣唐使的历史事件。 4.蒙古框图 考查内容、①自然地理特征(地形——高原、气候——蒙古高压),②畜牧业。 二、东南亚 5.菲律宾群岛的区域框图 考查内容:①两大岛屿名称,②首都的位置,③著名特产,④与我国南海海域专属经济区的重叠问题,⑤地质地貌特点。 6.中南半岛区域框图 考查内容:①湄公河流域 及其开发(热点问题),②泛亚铁路(起止点及其对我国西南地区开发的积极意义),③湄公河源头(澜沧江)的山河大势,开发时应注意的问题,④缅——泰——马——印尼的巨大锡矿带及旅游资源等,⑤克拉地峡及克拉运河有望开通后对泰国经济的积极意义和我国的石油安全问题,⑥马六甲海峡及航线,⑦马来群岛的地质地貌特点及成因,⑧区域内自然资源与物产,马来西亚、印度尼西亚的农业地域类型(热带经济作物种植园农业),⑨气候特征、旅游业等,⑩主要城市及首都的区位选择因素(华人、华侨对该区域的贡献)。 7.马六甲海峡框图 考查内容:①交通区位,②新加坡的工业区位,③气候——气压带和风带。 三、南亚 8.孟加拉国与喜马拉推山区域框图 考查内容:①喜马拉雅 山的成因,②雅鲁藏布江的水
数据融合各种算法及数学知识汇总 粗糙集理论 理论简介 面对日益增长的数据库,人们将如何从这些浩瀚的数据中找出有用的知识? 我们如何将所学到的知识去粗取精?什么是对事物的粗线条描述什么是细线条描述? 粗糙集合论回答了上面的这些问题。要想了解粗糙集合论的思想,我们先要了解一下什么叫做知识?假设有8个积木构成了一个集合A,我们记: A={x1,x2,x3,x4,x5,x6,x7,x8},每个积木块都有颜色属性,按照颜色的不同,我们能够把这堆积木分成R1={红,黄,蓝}三个大类,那么所有红颜色的积木构成集合X1={x1,x2,x6},黄颜色的积木构成集合X2={x3,x4},蓝颜色的积木是:X3={x5,x7,x8}。按照颜色这个属性我们就把积木集合A进行了一个划分(所谓A的划分就是指对于A中的任意一个元素必然属于且仅属于一个分类),那么我们就说颜色属性就是一种知识。在这个例子中我们不难看到,一种对集合A的划分就对应着关于A中元素的一个知识,假如还有其他的属性,比如还有形状R2={三角,方块,圆形},大小R3={大,中,小},这样加上R1属性对A构成的划分分别为: A/R1={X1,X2,X3}={{x1,x2,x6},{x3,x4},{x5,x7,x8}} (颜色分类) A/R2={Y1,Y2,Y3}={{x1,x2},{x5,x8},{x3,x4,x6,x7}} (形状分类) A/R3={Z1,Z2,Z3}={{x1,x2,x5},{x6,x8},{x3,x4,x7}} (大小分类) 上面这些所有的分类合在一起就形成了一个基本的知识库。那么这个基本知识库能表示什么概念呢?除了红的{x1,x2,x6}、大的{x1,x2,x5}、三角形的{x1,x2}这样的概念以外还可以表达例如大的且是三角形的 {x1,x2,x5}∩{x1,x2}={x1,x2},大三角{x1,x2,x5}∩{x1,x2}={x1,x2},蓝色的小的圆形({x5,x7,x8}∩{x3,x4,x7}∩{x3,x4,x6,x7}={x7},蓝色的或者中的积木{x5,x7,x8}∪{x6,x8}={x5,x6,x7,x8}。而类似这样的概念可以通过求交运算得到,比如X1与Y1的交就表示红色的三角。所有的这些能够用交、并表示的概念以及加上上面的三个基本知识(A/R1,A/R2.A/R3)一起就构成了一个知识系统记为R=R1∩R2∩R3,它所决定的所有知识是 A/R={{x1,x2},{x3,x4},{x5},{x6},{x7},{x8}}以及A/R中集合的并。 下面考虑近似这个概念。假设给定了一个A上的子集合X={x2,x5,x7},那么用我们的知识库中的知识应该怎样描述它呢?红色的三角?****的大圆? 都不是,无论是单属性知识还是由几个知识进行交、并运算合成的知识,都不能得到这个新的集合X,于是我们只好用我们已有的知识去近似它。也就是在所有的现有知识里面找出跟他最像的两个一个作为下近似,一个作为上近似。于是我们选择了“蓝色的大方块或者蓝色的小圆形”这个概念: {x5,x7}作为X的下近似。选择“三角形或者蓝色的”{x1,x2,x5,x7,x8}作为它的上近似,值得注意的是,下近似集是在那些所有的包含于X的知识库
高中地理:区域特征分析的方法 区域特征分析是高考试题的主旋律。在某一特定的区域背景中提供区域图和相关资料,进行空间定位,概括区域自然和人文的基本特征,分析自然要素和人文特征之间的关系,得出经济发展的有利条件和不利条件,反思人类活动是否合理,确定当地经济发展的基本思路。 一、区域特征分析的内容和思路 1.区域特征分析的内容 区域地理特征内容繁多,但归纳起来主要包括两个方面:区域自然地理特征(地形、土壤、气候、河流、湖泊、自然带、自然资源等自然地理要素的基本特征、成因及其描述)和区域社会经济特征(工业、农业、交通运输业、商业、旅游业、人口、聚落、文化等活动的基本特征及其主要成因)。要运用基本原理来重新梳理知识内容,理解自然环境要素的时空演变规律,解释各种地理现象的成因,包括气候的特点、成因;地貌的特点、成因;水文特征;土壤、生物与自然带分布原因;主要自然灾害的成因、时空变化等。关注人文要素的整体分析和典型案例的应用,包括资源和能源分布特点;工业、农业的地域类型和区位因素;交通运输方式和发展趋势;城市和城市化发展;文化景观与文化扩散类型;旅游资源特征与旅游业发展;人口与环境问题;国土整治与可持续发展对策等。 2.区域特征分析的基本思路 一个地区特定的地理位置,形成该地区特定的水热组合,即气候特征。气候进而影响水文、生物、土壤等,这些要素便构成了区域自然特征。人类从自然环境中开发和利用资源,发展农业生产、工业生产、城市建设、交通运输、商业贸易等经济活动,从而构成区域人文地理特征。 ①位置特征: 经纬度位置、半球位置、温度带位置、海陆位置、相邻位置、交通位置。 ②地形特征: 地形类型、地势高低、主要地形区。 ③气候特征: 气温和降水的数值特征、气候类型、气候特点。 ④水文特征: 河流汛期、流量、冰期、含沙量、落差等。 ⑤人口特征: 人口数量、年龄结构、人口迁移、人口分布。 ⑥经济特征: 产业结构、技术水平、农业区和工业区分布、主要产品和部门等。
学案33 区域特征和区域发展阶段分析方法 [目标定位] 区域特征就是指某特定区域内各种自然地理要素(位置、地形、气候、水文、土壤、植被及自然资源等)和人文地理要素(经济、人口、城市等)综合作用形成的综合地理特征,既有对区域内地理事象的描述,也有对其成因的解释。应掌握区域特征的两种基本方法:综合分析法和比较法。 一、区域特征 从整体上认识和分析某地区的区域特征。区域特征是各种地理要素相互影响、相互制约、相互联系形成的,需通过全面、系统的分析,从整体上来认识。在分析过程中要善于抓主导因素,例如气候酷寒是南极洲区域特征的主导因素,它直接影响到该地区的其他自然特征(地势高、烈风、淡水资源和风能资源丰富等)和人文特征(无常住居民)。 例 1读图,回答下列问题。
(1)描述图示地区主要地形区的分布状况。 ___________________________________________________________________________ _____________________________________________________________________ (2)简述黄河乌海至磴口段河流流向及水文特征。 ___________________________________________________________________________ _____________________________________________________________________ (3)指出河套平原的年降水量分布特征,并分析原因。 ___________________________________________________________________________ ___________________________________________________________________________ ____ ______________________________________________________________ 河套平原素有“塞上米粮川”之称,是内蒙古自治区粮、油、糖生产基地。 (4)指出该地发展农业生产的限制性自然因素,并说明进行改造的方式及可能引发的 问题。 ________________________________________________________________________ ________________________________________________________________________ ________________________________________________________________________ 近10年来,土默川平原实施退耕还草工程,使这一地区成为中国“乳都”呼和浩特的核心奶源基地。 (5)分析产生这一转变的社会经济因素。 ________________________________________________________________________ ________________________________________________________________________ 二、区域地理特征对区域发展的影响
区域自然地理特征的分析 【命题规律】 选取典型的世界或中国的具有代表性的区域,进行系统地地理知识的命题设计,此类命题比重较大,因此准确把握重点区域的地理环境特征,学会区域分析与比较是灵活应考的关键。 【学习目标】 1.能在地图上辨认各种地形,能描述各类地形的特征。 2.能描述气温、降水、气候类型的分布规律,并解释原因。 3.能解释世界上主要国家或地区的自然地理特征。 【能力初探】 (2008年北京卷)36.(36分)读图9,回答下列问题。 (1)描述图示地区主要地形区的分布状况。(6分) (2)简述黄河乌海至磴口段河流流向及水文特征。(7分) (3)指出河套平原的年降水量分布特征,并分析原因。(8分) 图 9
【2012年福建卷】图13示意中国东部某区域。阅读图文材料,回答下列问题。 国家“十二五”规划纲要提出:要大力扩大文化、软件和信息服务、商贸流通、金融保险等新兴服务出口。积极支持东部地区加快产业结构的调整与升级,进一步提高能源、土地、海洋等资源的利用效率。 图 13 (1)描述图示区域地形的主要特点。(7分)
(经典例题)图一是世界某区域的年降水量和年平均等温线图,图二是其区域简图。读图并结合所学知识,回答下列问题。 离岸风 M 2000 城市 国界 等高线 河流 洋流 (1)读图一,描述回归线地区年降水量的分布特征,并分析原因。(4分) (2)图中回归线地区沿海与内陆、东岸与西岸的年均温差异很大,试分析原因。(4分) (3)分析图二中M城市的气候类型及其成因。(4分)
【特别提醒】解答区域综合特征类试题应注意以下两点: (1)掌握描述的方向和角度,即从哪些方面去分析。如地形特征要从地形类型、地形起伏状况、主要地形区名称及分布等方面分析。 (2)语言的组织:①明确要描述什么,即描述的方向,主要是将地理问题和地理原理相对接,实现知识的迁移和应用;②描述的全面性,即描述的角度和层次是否完整;③描述的专业性,关键词不能丢而且要准确,尽量使用学科术语而不能口语化。 【课后拓展】 (2008年北京卷)36.(36分)读图9,回答下列问题。 河套平原素有“塞上米粮川”之称,是内蒙古自治区粮、油、糖生产基地。 (4)指出该地发展农业生产的限制性自然因素,并说明进行改造的方式及可能引发的问题。(7分) 【2009年安徽卷】 根据材料和图10,结合所学知识,回答下列问题。 图10中A 地年平均降水量734.5毫米,其中夏季降水量占全年的61.4%;1月平均气温-12℃,7月平均气温24.6℃。 (1)简述流经A 地河流的水文特征。(8分) 图 9
数据融合是WSN中非常重要的一项技术,也是目前的一个研究热点,通过一定算法将采集到的数据进行各种网内处理,去除冗余信息,减少数据传输量,降低能耗,延长网络生命周期。本文以从降低传输数据量和能量方面对数据融合方法进行分类,介绍其研究现状。 1.与路由相结合的数据融合 将路由技术和数据融合结合起来,通过在数据转发过程中适当地进行数据融合,减轻网络拥塞,延长网络生存时间[1]。 1.1查询路由中的数据融合 定向扩散(directed diffusion)[2]作为查询路由的代表,数据融合主要是在其数据传播阶段进行,采用抑制副本的方法,对转发过的数据进行缓存,若发现重复数据将不予转发,该方法有很好的能源自适应性,但是他只能在他选择的随机路由上进行数据融合,并不是最优方案。 1.2分层路由中的数据融合 Wendi Rabiner Heinzelman 等提出了在无线传感器网络中使用分簇概念,其将网络分为不同层次的LEACH 算法[3] :通过某种方式周期性随机选举簇头,簇头在无线信道中广播信息,其余节点检测信号 并选择信号最强的簇头加入,从而形成不同的簇。每个簇头在收到本簇成员后进行数据融合处理,并将结果发送给汇集节点。LEACH算法仅强调数据融合的重要性,但未给出具体的融合方法。TEEN是LEACH 算法的改进[4],通过缓存机制抑制不需要转发的数据,进一步减少数据融合过程中的数据亮。
1.3链式路由中的数据融合 Lindsey S 等人在L EACH 的基础上,提出了PEGASIS 算法[5]每个节点通过贪婪算法找到与其最近的邻居并连接,从而整个网络形成一个链,同时设定一个距离Sink 最近的节点为链头节点,它与Sink进行一跳通信。数据总是在某个节点与其邻居之间传输,节点通过多跳方式轮流传输数据到Sink 处,位于链头节点和源节点之间的节点进行融合操作,最终链头节点将结果传送给汇聚节点。链式结构使每个节点发送数据距离几乎最短,比LEACH节能,但增大了数据传送的平均延时,和传输失败率。PEDAP (power efficient data gathering and aggregation protocol) [6]协议进一步发展了PEGASIS 协议,其核心思想是把WSN 的所有节点构造成一棵最小汇集树(minimum spanning tree) 。节点不管在每一轮内接收到多少个来自各子节点的数据包,都将压缩融合为单个数据包,再进行转发,以最小化每轮数据传输的 总能耗。然而,PEDAP 存在难以及时排除死亡节点(非能量耗尽) 的缺点。 2.基于树的数据融合 现有的算法有最短路径树(SPT)、贪婪增量树(GIT)、近源汇集树(CNS)和Steiner树以及他们的改进算法。Zhang [7]提出 DCTC(dynamic convey tree based collaboration) 算法。通过目标附近的节点协同构建动态生成树,协同组节点把测量数据沿确定的生成树向根节点传输,在传输过程中,汇聚节点对其子生成树节点的数 据进行数据融合。Luo [8-9]了MFST (minimum fusion steiner t ree)
专题复习《区域差异分析》 作者:杨村一中金玉玲 指导教师:宋印海顾启凤一、教学目标 (一)知识与技能 了解区域,比较区域的不同点,掌握区域差异分析的方法。解决区域发展方面的问题。(二)过程与方法 1、通过对材料、图片的分析,进一步培养学生从材料、图片中提取、认定、加工处理各种信息的能力,最终进行讨论分析,得出结论。 2、通过对习题总结和分析,培养学生举一反三的能力,学会解决不同区域可持续发展的问题。 (三)情感态度与价值观 通过不同区域差异的分析,培养学生的辩证唯物观,充分认识到人类对区域可持续发展方面做出贡献。 二、课程标准要求 1、了解区域的含义 2、以两个不同区域为例,比较自然环境、人类活动的区域差异 3、以某区域为例,比较不同发展阶段地理环境对人类生产和生活方式的影响 三、重点难点 运用区域差异分析的方法解决不同区域异同及其区域发展问题。 四、教学方法 对比分析法、综合程序法、讨论探究法相结合,充分发挥学生的主体作用,加强教学过程中师生互动,重视学生的探究活动。 五、教学用具 自制幻灯片、相关材料和图片 六、课时安排 1课时
七、教学过程: 【导入】最近我收到了两位好朋友的来信,信上的邮票吸引了我。(呈现出两幅邮票的画面)同学们能判断出我的朋友是来自哪里的吗?你是判断的依据是什么? 【学生回答】一个朋友是来自江南地区,另一位来自内蒙古。我们可以通过不同地区的民居判断出来。 【承接】建筑是不同地区区域特征的缩影,而建筑形式、风格都充分反映了当地地理环境的特点。 【提问】请同学们试着分别说明,两处的建筑怎样反映当地地理环境的特点?当地地理环境的特征究竟是什么那? 【学生讨论并回答,老师提问并总结】 1、江南水乡属于亚热带季风气候,夏季高温多雨,湿度大,通风散热是建筑房屋首先要考虑的问题,屋脊高,房间空间大,利于通风;屋檐宽,利于遮挡阳光,降低室内的温度。南方房屋顶坡度陡是为了容易排水,屋檐宽也是为了雨水排得更远。 2、温带大陆性气候,日夜温差大,风也很大,这里的居民以游牧为主要生产方式,所以便于移动又可以御风保温——蒙古包。 【小结】 民居只是反映不同地区区域特征的一部分,而一个区域的主要差别体现在自然地理环境和人文地理环境方面。我们具体来讨论一下区域特征与区域差异。 【教师承接提问】 区域是人为按一定的指标和方法划分的,我们怎么分析一个区域的特征,应该从哪些方面入手? 【板书】一、描述区域特征。 (请同学们讨论一下,时间为两分钟)
区域地理特征分析的基本方法 一、区域地理特征分析的基本方法可以概括为 进行区域定位——根据区域位置,判断分析地形、气候的类型和特征——以地形、气候条件为基础,确定其相应的水文、植被、土壤等自然地理要素的特征——以自然地理特征为条件,分析自然地理特征对主要人文地理现象的影响。 分析评价区域发展的主要优势条件和限制性因素——确定区域发展方向、主要问题及其解决措施。 二、区域的自然地理特征 1、地理位置特征: 半球位置、经纬度位置、海陆位置、相对位置 2、地形特点描述: ①地形组成(主要地形类型)②地形分布,延伸方向③地势特点(起伏大小、倾斜方向)④特殊地形地貌⑤海岸线特征(长短、曲直) 3、区域气候特点描述: ①气候类型和气候分布②气温特点(冬夏气温高低、气温季节变化,温差大小、温度带)③降水特点(降水总量、降水空间分布和季节变化、水热配合情况、干湿状况)④光照状况⑤气象灾害如中国南方地区气候特点:①气候类型以亚热带季风为主,热带季风气候面积小②冬季温和少雨,夏季高温多雨,雨热同期③雨季长雨量大,夏秋季节多台风,地处湿润区,年降水量800毫米以上。 4、河流水系水文特点 水系特点: ①河流长度、流向②流域面积大或小③支流多或少④河网密度、⑤落差大小或峡谷数量分布(例如长江上游水系特点:落差大,多峡谷,支流多,金沙江段自北向南流,流域面积小;川江段自西向东流,流域面积较大) 分析金沙江段流域面积小的原因:因为流经地区河谷狭小,汇水面积小所以流域面积狭小。 水文特点: ①流量大小、②汛期长短、汛期出现在哪个季节③水位季节变化大小、④含沙量大小、⑤有无结冰期及其长短、有无凌汛⑥水能⑦流速 5、植被、土壤特征 植被:①类型(森林、草原、荒漠)+疏密②水平分布规律③垂直地域分异是否显著 土壤:①类型(红壤、黄土、棕壤;森林土、草原土、荒漠土)②分布③特点(肥力高低)
区域地理复习的思路探索[转] 区域地理复习的思路探索 水富一 中刘仁贵 高中地理教育教学内容大体分成三块:自然地理、人文地理和区域地理。区域地实际是自然地理和人文地理理论在区域中的实际运用。我认为区域地理复习的一般思路如下: 一、把握区域特征 把握区域特征是复习区域的基础,无论是区域发展方向、还是存在问题、产业结构优化调整、都是建立在区域特征基础上的。区域特征复习不是去背各那些要点,而主要是学会区域地理分析的一些方法和思路。一个区域的特征包括自然和人文两个部分。 (一)自然特征:主要包括位置、地形、气候、气候、植被和土壤等 位置特征 绝对位置(经纬度位置) 相对位置(海陆位置、山河位置等) 1、位置特征 例如美国本土位于西经75———西经123之间,北纬30——北纬49度之间西接太平洋,东临大西洋,南接墨西哥湾和墨西高原,北与加拿大接壤
例如美国地形特征为:地势东西高,中间低;东部为古老低矮的阿巴拉契亚山脉;西部为年轻、高大的科迪勒拉山系(海岸山脉、落基山脉等),山脉间有宽广盆地;中部为广阔平坦的平原。 气温和降水的分布 主要影响因素 气候类型 气候特征 主要气象灾害 3、气候特征: 例如美国气候特征为:气候类型复杂多样,温带大陆性气候广布,地形对气候影响显著、易受寒潮、飓风威胁等 河流流向、流程 河网密度 河道特征 流域面积 水系归属、排列形式 水系特征 径流量 结冰情况 含沙量 水位 水文特征 河流特征 4、河流特征:
(水系特征在中学一般不要求掌握) 5、植被和土壤:(略) 在自然环境各组成要素中,地理位置和地形是基础要素,根据位置和地形可推断气候,据气候和地形可推断河流、植被、土壤(详见加强各区域要素联系的分析)。 (二)人文地理特征:主要包括人口、居民、城市、交通、工业、农业、环境和可持续发展等,其中区位分析和可持续发展是核心知识。居民 人种 人口分布和迁移 民族、宗教、文化 1、居民: 2、农业: 3、工业: 4、城市: 5、交通:
一、信息融合技术分类: 多源信息融合技术分为假设检验型信息融合技术、滤波跟踪型信息融合技术、 聚类分析型信息融合技术、模式识别型信息融合技术、人工智能型信息融合技术等。 1、假设检验型信息融合技术 假设检验型信息融合技术是以统计假设检验原理为基础,信息融合中心选择某 种最优化假设检验判决准则执行多传感器数据假设检验处理,获取综合相关结论。 2、滤波跟踪型信息融合技术 滤波跟踪型信息融合技术是将卡尔曼滤波(或其他滤波)航迹相关技术由单一传 感器扩展到多个传感器组成的探测网,用联合卡尔曼滤波相关算法执行多传感器滤波跟踪相关处理。 3、聚类分析型信息融合技术 聚类分析型信息融合技术是以统计聚类分析或模糊聚类分析原理为基础,在多 目标、多传感器大量观测数据样本的情况下,使来自同一目标的数据样本自然聚集、来自不同目标的数据样本自然隔离,从而实现多目标信息融合。 4、模式识别型信息融合技术 模式识别型信息融合技术是以统计模式识别或模糊模式识别原理为基础,在通 常的单一传感器模式识别准则基础上建立最小风险多目标多传感器模式识别判决 准则,通过信息融合处理自然实现目标分类和识别。 5、人工智能信息融合技术 人工智能信息融合技术将人工智能技术应用于多传感器信息融合,对于解决信 息融合中的不精确、不确定信息有着很大优势,因此成为信息融合的发展方向。智能融合方法可分为:基于专家系统的融合方法;基于神经网络的融合方法;基于生物基础的融合方法;基于模糊逻辑的融合方法等。
二、按融合判决方式分类: 多源信息融合的融合判决方式分为硬判决方式和软判决方式。所谓硬判决或软判决指的是数据处理活动中用于信号检测、目标识别的判决方式。每个传感器内部或信息融合中心都既可选用硬判决方式,也可选用软判决方式。 1、硬判决方式 硬判决方式设置有确定的预置判决门限。只有当数据样本特征量达到或超过预置门限时,系统才做出判决断言;只有当系统做出了确定的断言时,系统才向更高层次系统传送”确定无疑”的判决结论。这种判决方式以经典的数理逻辑为基础,是确定性的。 2、软判决方式 软判决方式不设置确定不变的判决门限。无论系统何时收到观测数据都要执行相应分析,都要做出适当评价,也都向更高层次系统传送评判结论意见及其有关信息,包括评判结果的置信度。这些评判不一定是确定无疑的,但它可以更充分地发挥所有有用信息的效用,使信息融合结论更可靠更合理。 三、按信息融合处理层次分类: 按信息融合处理层次分类,多源信息融合可分为数据层信息融合、特征层信息融合、决策层信息融合等。 1、数据层信息融合 数据层信息融合联合来自每一个传感器的原始数据,其优点是信息丰富,结果精确,但是通讯和运算量大,数据需要预处理,传感器之间往往要求同质或者同等精度。主要的数学方法是:加权平均法、卡尔曼滤波[147,148]、贝叶斯估计、参数估计法等,与信号处理有一定的相似性。 2、特征层信息融合 特征层融合联合从观测量中提取的特征向量,既保持足够数量的重要信息,又实现信息压缩,有利于实时性;但是不可避免地会有某些信息损失,精确性有所下降,因而需对传感器预处理提出较严格的要求。主要的数学方法是:分离
区域分析与区域规划(第二版)(崔功毫魏清泉刘科伟编著) 课后答案 U1绪论 1、谈谈自己对区域概念的理解,简述区域的类型及其划分方法。 答:区域的概念:区域是一个空间概念,是地球表面上占有一定空间的,以不同物质与非物质客体为对象的区域结构形式。 区域的类型及其划分方法: ○1区域的概念划分:均质区、结节区 ○2区域的特性划分:整体性、结构性、动态性 2、我国当前区域发展面临的主要问题有哪些? 答:区域差距、发展与资源、地区间恶性竞争、区域合作不完善。 3、区域分析的主要内容是什么?试结合你自己熟悉区域举例说明。 答:(1)区域发展条件分析(自然、社会) (2)发展状况及存在的问题(经济分析)经济水平、阶段、产业结构 (3)发展方向机策略研究 4、谈谈你对区域发展、区域研究、区域科学三个概念及其间关系的认识。 答:区域发展是指一定时空范围内所进行的以资源开发、产业组织和结构优化为中心的一系列经济社会活动。 区域研究是以综合、全面的把握或理解某一特定区域的人类团体所创造的政治经济社会文化系统为目的的。他把区域作为复合系统来研究,在一定时间空间范围内整体的把握研究对象。 区域科学是用各种近代计量分析和传统区位分析相结合的方法,由区域或空间的诸要素及其组合所形成的差异和变化的分析入手,对不同等级和类型区域的社会经济发展等问题进行研究的应用学科。 关系:相互依存、互为因果、不可分割。区域发展是以人为主体,一协调区域内部和区域之间人地关系为目的,并最终为人类提供良好生存环境的一系列经济社会活动,具有目的性无限性可持续性。区域研究是源于对区域经济社会发展问题的探讨,是区域不断持续快速发展,人类社会不断进步所提出的客观要求。区域科学是一门研究人类活动区域的跨学科新兴科学,目的是探索一条更加科学的方法来开展区域研究,为区域发展及区域分析等提供可靠的理论基础。 U2区域发展的资源环境基础分析 1、简述生态环境与区域发展的关系 答:自然环境极其变迁对人类经济社会发展具有重要的影响,同时也对人类文化产生着重大的影响,他是文化存在和发展的物质条件,生态环境问题也会制约区域的发展,区域发展是生态环境保护的前提。区域发展是生态环境保护的前提。改善生态环境是为了更好地促进区域发展,同时,区域发展也应该是建立在保护生态环境基础上的可持续发展。 2、什么是生态环境质量?简述生态环境质量评价的内容与方法。 答:(1)生态环境质量:是指在一个具体的时间和空间范围内生态系统的总体或部分生态因子的组合体对人类的生存及社会经济持续发展的适宜程度。 (2)内容:生态环境调查、生态环境现状评价和影响评价。
专题一:国家地理位置特点的描述 【学习目标】 1.以尼加拉瓜为案例,学习探究一个国家的地理位置特点(特征)的描述方法,并能迁移运用。 2.根据国家地理位置特点,评价其优越性。 方法模板 一、(国家)地理位置 二、评价一个国家地理位置特点的优越性: 1.经纬度位置的优越性,如位于热带,热量条件充足;农业→农作物种类、生长期、作物熟制 2.海陆位置的优越性,如降水;临海,有利于发展海洋运输和渔业。 3.相对位置的重要性,如邻国众多,利于发展对外贸易;市场广阔等。 4.交通位置的重要性等。 【案例学习】尼加拉瓜的地理位置 尼加拉瓜共和国(The Republic of Nicaragua ),国名释义源于印第安酋长尼加鲁的姓氏,别称为“湖泊和火山之国”。 材料一:图1是甲国地图。甲国是美国重要的服装进口国,服装生产中心在A 城;首都B 城是该国重要的工业中心,纺织、 食品、制糖是其主要工业部门。 [探究1](2013.四川卷)结合图文材料,简述甲国的地理位置。(6分) [探究2]根据甲国的地理位置特点,说明其优越性。(6分) 【迁移应用】 1.根据图文材料,完成下列问题。 材料一:泰国(Thailand ),有“微笑国度”、“千佛之国”、“白象之国”等美称,是世界最闻名的旅游胜地之一。 材料二:东南亚地区图 (1)结合材料,描述泰国的地理位置。(6分) 3.下图为科特迪瓦的地理位置图及布瓦凯地区水系图和布瓦凯市的气候资料。读图回答下列问题。 (1)描述科特迪瓦的地理位置特征。(6分) 4.厄立特里亚气候干旱,降水量小而且不稳定。2007年人均国民收入仅270美元,农业是国民经济的支柱,但粮食不能自给。农业生产技术相对落后,如在平原、山地斜坡主要采用传统地面灌溉和引洪灌溉的方式,很少实施喷灌、滴灌。目前我国和厄立特里亚正在开展农 绝对位置 相对位置 海上隔海相望: 陆上相邻位置: 半球位置 位置 位置 某国(地区)的方位 经济位置 交通位置 政治位置