
ABS 的模糊滑模变结构控制方法及仿真研究
唐国元 宾鸿赞
华中科技大学,武汉,430074
摘要:分析了车辆防抱死制动系统的滑模变结构控制,提出了防抱死制动系统的模糊滑模变结构控制方法,根据滑模切换函数及其导数对滑模控制量进行模糊划分,形成二维模糊控制规则表。对切换函数及其导数采用动态模糊划分,以提高系统控制的敏感度。对单轮系统车辆的仿真表明,模糊滑模变结构控制方法既能缩短响应时间,也能抑制系统颤振。
关键词:模糊控制;滑模变结构控制;防抱死制动系统;仿真中图分类号:U463 文章编号:1004—132X (2007)13—1629—04Simulation Study on Fuzzy Sliding Mode Control Approach for ABS
Tang Guoyuan Bin Hongzan
Huazhong University of Science and Technology ,Wuhan ,430074
Abstract :Based on t he analysis of sliding mode cont rol of vehicle ABS (anti -lock brake system ),a f uzzy sliding mode cont rol approach for ABS was p resented.To rest rain chatter of t he system ,t he cont rol value of sliding mode controller was partitioned wit h f uzzy way according to switch f unction and it s derivative which denoted t he distance between current state point and switch surface and veloc 2ity of state point moving to t he surface respectively.The f uzzy partition of switch f unction and it s de 2rivative was dynamic ,which can enhance sensitivity of t he cont rol system.The simulation result s of single wheel vehicle show t hat t he presented met hod can shorten t he response time and t he chatter is rest rained.
K ey w ords :f uzzy cont rol ;sliding mode cont rol ;anti -lock brake system (ABS );simulation
收稿日期:2006—03—09
0 引言
目前,大多数防抱死制动系统(anti -lock brake system ,ABS )都采用车轮角加速度门限控制。Yeh 等[1,2]等提出了一种防抱死制动特性的共轭边界分析方法。程军[3]研究了P 2R 4防抱死逻辑并讨论了其控制效果。目前车辆上广泛使用的防抱死逻辑是P 1R 3,其边界的确定相对简单。总的说来,这种根据车轮加减速度门限及参考滑移率方法设计的开关控制的缺点是:①需要根据路面来确定合适的门限值;②车轮滑移率不是保持在最佳滑移率上;③串行逻辑判断容易发生逻辑冲突甚至失控。文献[4Ο7]采用滑模变结构控制方法设计了ABS 控制器,这种方法的不足在于控制量的反复切换引起系统颤振。本文采用仿真方法研究了ABS 滑模控制器的控制量对颤振的影响,并设计了模糊滑模变结构控制器,不仅能使系统达到最佳滑移率的时间缩短,而且也能使系统的颤振显著减小。
1 ABS 的滑模变结构控制
对车轮的防抱死制动控制实际上是对纵向滑
移率λ的误差控制。考虑滑模控制,设λopt 为最佳滑移率,令切换函数为
s =e ?
+ce c >0
(1)e =λ-λopt
(2)
式中,c 为斜率。
选s =0作为切换函数。在以λ、
λ?
作为状态变量的相平面中,s =0是一条通过(λopt ,0)的直线,其斜率为-c 。为了保证车轮在制动过程中轮胎相对于
地面的滑移轨迹(λ,λ
?
)能够沿切换线滑向控制设计目标(λopt ,0),选取制动力矩
M b =
M -b s >0M +
b s <0
(3)
式中,M -b 为松闸力矩;M +
b 为制动力矩。
按式(3)选择合适的制动控制律以及满足滑模可达条件的控制切换函数s ,则可保证系统的滑移状态轨迹能够朝切换线运动并趋向平衡点,根据文献[4]的讨论可推出,滑模变结构控制律为
M b =U eq +U s =
∫f (v )-∫
T c
sgn (s )(4)
式中,U eq 为等效控制[3];U s 为附加控制,用以控制系统向趋近于s =0的方向运动;T c 为制动力矩变化率,可根据相应的车辆参数设为一常数。
用MA TL AB/Simulink 对单轮车辆模型及
?
9261?
滑变控制器进行了仿真研究。车辆仿真参数如下:车辆质量m =1660kg ,车轮转动惯量I w =
13175kg ?m 2
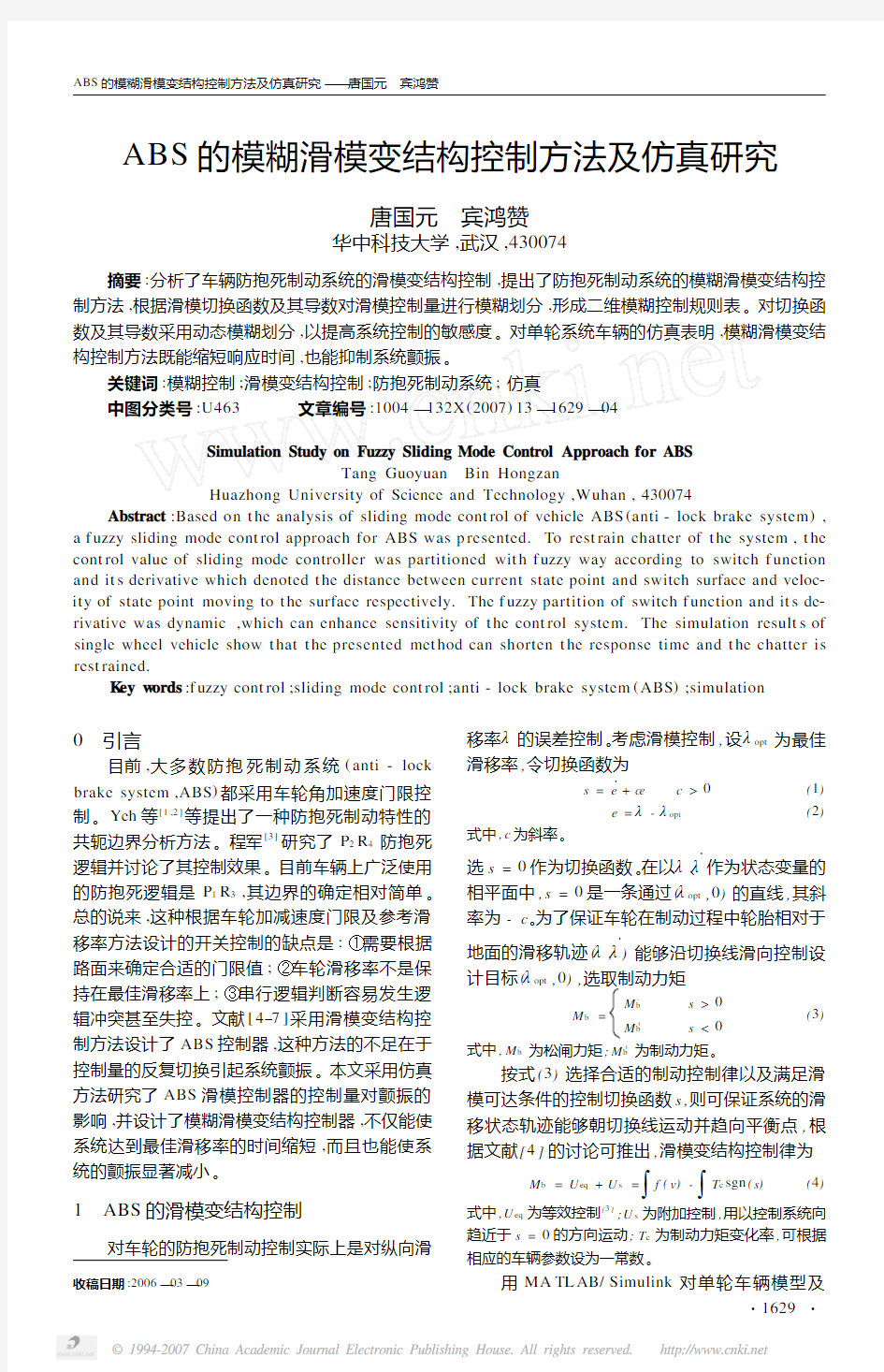
,车轮半径R w =01326m ,车辆初速率为20m/s ,最佳滑移率为012,附着系数为016。在两种不同工况下进行仿真:工况①,T c =30kN ?m/s ;工况②,T c =45kN ?m/s 。图1所示为两种情况下的仿真结果
。(a )
车速及轮速变化
(b )
滑移率变化
(c )附着系数变化
(d )制动力矩变化
1.工况①仿真结果
2.工况②仿真结果
图1 在两种制动力矩变化率情况下的仿真结果
图1a 所示为车速和轮速曲线。由图1a 可见,
若设置制动力矩变化率的附加项为常数,当增大该常数值时,可以缩短滑移率达到最佳值(滑模面)的时间,如图1b 中的曲线2所示。但与此同时,该值的增大也增加了系统的颤振,如图1b 、图1d 所示,曲线2的颤振幅度明显大于曲线1的颤振幅度。由式(4)可知,T c 取值的大小将影响系统运
动点趋近切换面的速率。当T c 增大时,s ¨增大,即
运动点到达滑模面的速率增大,这无疑会增加系统的颤振。对于一个理想的滑模变结构系统,假设“结构”切换的过程具有理想开关特性(即无时间及空间滞后),系统状态测量精确无误,控制量不受限制,则滑动模态总是降维的光滑运动,而且逐
渐接近并稳定于原点,不会出现颤振。但对于一个
实际的滑模变结构系统,控制力受到限制,从而使系统的加速度有限,另外,系统的惯性、切换开关的时间、空间滞后以及状态监测误差,都将会在光滑的滑动模态上叠加一个锯齿形的轨迹,因此在实际上抖振必然存在,只能消弱颤振的幅度而无法完全消除它,消除了颤振也就消除了滑模变结构控制的抗摄动及抗扰动的能力。用趋近率既可以设计系统到达滑移面的速率,也可以有效地改善滑移面上系统的颤振。在满足广义滑模条件下,控制量有很大的取值范围,因而可有多个趋近滑移面的速率。到达滑移面的速率大,显然容易引起颤振。在取等速趋近率的情况下,若该速率值大,则到达滑移面的速率大(即惯性大),必然使滑移面上的颤振加大;若该速率值小,则到达滑移面的速率小,也即在滑移面上的颤振小,但在远离滑移面时将导致系统的过渡过程变慢,因而可以在不同的状态空间位置取不同的趋近速率。
2 模糊滑模控制
2.1 滑模控制的模糊化
当ss ?
<0时,系统状态将趋向于滑动面,当|s |较大时,若增大趋近率,则运动点将加快向滑模面运动,当|s |较小时,若趋近率大,则容易引
起较大颤振,因此应采用较小的趋近率。在s 、s ?
及T c 的论域上形成模糊子集,并根据以上分析得到模糊规则,可得到一个完整的模糊滑模控制器(f uzzy sliding model cont roller ,FSMC )。2.2 模糊控制器
定义语言模糊集:{PB ,PM ,PS ,PO ,NO ,NS ,NM ,NB }={正大,正中,正小,正零,负零,负小,负中,负大}。
通过对上述仿真系统的分析,设s 的论域范
围为(-60,60),s ?
的论域范围为(-2000,2000),
T c 的论域范围为(-60,60)kN ?m/s 。将s 、s ?
作为模糊控制器的输入量,T c 为模糊控制器的输出。模糊规则由一系列“IF …T H EN …”语句模糊推理组成,采用Mamdani 模糊推理方法,其规则可用如表1所示。
?
0361?
表1 T c为输出的模糊规则表
s
s?
PB PM PS PO NO NS NM NB
PB PB PB PB PB NB NB NB NM
PM PB PB PB PB NB NB NM NS
PS PB PB PB PM NB NM NS NO
PO PB PB PM PS NM NS NO NO
NO PO PO PS PM NS NM NB NB
NS PO PS PM PB NM NB NB NB
NM PS PM PB PB NB NB NB NB
NB PM PB PB PB NB NB NB NB
2.3 输入变量的动态模糊划分
由于控制的高频切换,s、s?在0附近的变化频率更高,而在离0值较远处的变化频率相对较低。因此,在对输入量进行模糊划分时,采用变化的量化方法,在0值附近使模糊集的划分密度较大,而在离0值较远处使模糊集的划分密度相对较小,以此来提高系统控制的敏感度。设量化因子为k,则可通过动态调整k以实现模糊集的划分。设m 为放大或缩小的系数,其模糊子集为
m={AB,AM,AS,0,CS,CM,CB}(5)其中,AB、AM、AS、0、CS、CM、CB对应的语言变量分别为高放、中放、低放、不变、小缩、中缩、大缩,分别表示对应的放大或缩小程度。根据以上分析可形成调整规则(表2)。s、s?在论域上的划分并不是均匀的。
表2 调整规则表(m为输出)
s
s?
PB PM PS PO NO NS NM NB
PB CB CM CS00CS CM CB PM CM CS0000CS CM PS CS00AM AM00
CS PO00AM AB AB AM
NO
00AM AB AB AM0
NS CS00AM AM00CS
NM CM CS0000CS CM
NB CB CM CS00CS CM CB
2.4 仿真
沿用车辆的上述仿真参数,用MA TL AB/ Simulink实现模糊滑模变结构控制器。在工况③和工况④下进行仿真:工况③,单一附着条件路面,设定单一附着条件路面的路面条件与上文相同即最佳滑移率为012,附着系数为016;工况④,混合路面,制动开始时,车辆运行在冰路面上(最佳滑移率为0108,附着系数为012),115s后转为沥青路面(最佳滑移率为012,附着系数为018)。工况③、工况④的仿真结果分别如图2~图9所
图2 工况③车速及轮速变化
图3 工况③滑移率变化
图4 工况③附着系数变化
图5 工况③制动力矩变化
图6 工况④车速及轮速变化
图7 工况④滑移率变化
图8 工况④附着系数变化
示。由图2~图5可知,采用模糊滑模变结构控制后,兼顾了两个方面,一方面,系统达到最佳滑移率的时间缩短,另一方面,系统的颤振大大减
?
1
3
6
1
?
图9 工况④制动力矩变化
小。与常值切换不同,在制动过程中制动力矩的幅值是变化的。
由图6~图9可知,系统能及时跟踪路面情况的变化,及时调整控制输出,使制动车轮保持工作在最佳滑移率,同时也使车辆的制动最有效率。由此证明,所提出的模糊滑模控制方法是有效的。
3 结论
本文研究了滑模控制方法在ABS中的应用,通过对滑模控制的仿真和讨论,分析了引起颤振的原因。提出了ABS的模糊滑模变结构控制方法,设计了模糊控制器。对单轮系统车辆的仿真表明,模糊滑模变结构控制方法能在缩短响应时间的同时抑制系统颤振。
参考文献:
[1] Yeh Edge C,Kuo Chin Yen,Sun Pei Len.Conju2
gate Boundary Method for Control Law Design of
Anti-skid Brake System[J].Vehicle Design,1990,
11(1):40Ο61.
[2] Yeh Edge C,Day G C A,Parametric A.Study of
Anti-skid Brake System Using Poincare Map Con2
cept[J].Vehicle Design,1992,13(3):210Ο232. [3] 程军.防抱制动系统防抱逻辑的研究[J].汽车工程,
1995,17(1):1Ο11.
[4] 王贵勇.汽车防抱制动系统(ABS)控制算法的研究
[D].长春:吉林工业大学,2000.
[5] 龙晓林,杜小芳,徐达.汽车ABS滑模变结构控制的
分析与仿真[J].专用汽车,2004(3):25Ο26.
[6] Drakunov S,Ozguner U,Dix P,et al.ABS Control
Using Optimum Search Via Sliding Modes[J].IEEE
Transactions on Control Systems Technology,
1995,3(1):79Ο85.
[7] 赵治国,方宗德,傅卫平.防抱制动系统滑模状态观
测和控制系统仿真[J].计算机仿真,2002,19(1):
69Ο75.
(编辑 郭 伟)
作者简介:唐国元,男,1973年生。华中科技大学交通学院讲师。研究方向为机电一体化、计算机仿真。发表论文10篇。宾鸿赞,男,1940年生。华中科技大学机械科学与工程学院教授、博士研究生导师。(上接第1628页
)
图9 全轮转向左后轮与右后轮转角关系
4 结论
本文提出了机-电-液复合结构的四轮转向控制平台,对平台的构成和工作原理进行了简要说明。针对平台具有非线性和快时变的特点,设计模糊自适应PID控制器,以保证平台的鲁棒性和抗干扰能力。根据相关资料初步确定模糊控制规则表,然后通过计算仿真和实验精细调整规则表。应用C语言对DSP平台进行开发,在硬件上实现了连续式模糊自适应PID控制策略。仿真和外加扰动实验结果证实了控制策略对平台的控制具有快速性、准确性、稳定性和鲁棒性。此控制器设计简单,造价低,容易被广大习惯于PID控制的工程师所接受,易于在工程实际中广泛应用。
参考文献:
[1] 郭孔辉,轧浩.车辆四轮转向系统的控制方法[J].吉
林工业大学学报,1998,28(4):1Ο4.
[2] 屈求真,刘延柱.四轮转向汽车的动力学控制现状
及展望[J].中国机械工程,1999,10(8):946Ο949. [3] Jia Y ingmin.Robust Control with Decoupling Perform2
ance for Steering and T raction of4ws Vehicles Under
Velocity Varying Motion[J].IEEE T ransactions on
C ontrol Systems T echnology,2000,8(5):554Ο569.
[4] T okihiko A,K atsuhiko S.Development of4WS Control
Algorithms for an SUV[J].J SAE Review,2003,24:
441Ο448.
[5] K evin M P,Stephen Y.Fuzzy Control[M].Menlo
Park,CA:Addison Wesley Longman,1998.
[6] Nishida M,Sugeno M.Fuzzy C ontrol of Model Car[J].
Fuzzy Sets and Systems,1985,60(6):103Ο113.
(编辑 郭 伟)
作者简介:叶 敏,男,1978年生。西安交通大学机械工程学院博士研究生。研究方向为非线性鲁棒控制。曹秉刚,男,1953年生。西安交通大学机械工程学院教授、博士研究生导师。司癸卯,男, 1963年生。长安大学工程机械学院副教授。焦生杰,男,1955年生。长安大学工程机械学院教授、博士研究生导师。
?
2
3
6
1
?
基于趋近律的滑模控制 一、基于趋近律的滑模控制1、控制器的设计针对状态方程 Bu Ax x += (1) 采用趋近律的控制方式,控制律推导如下: Cx s =(2)slaw x C s == (3) 其中slaw 为趋近律。 将状态方程式(1)代人(2)得 )()(1s CAx CB u +-=-(4) 可见,控制器的抖振程度取决于趋近律s 表达式中的切换项。2、仿真实例 对象为二阶传递函数: as s b s G p += 2)(其中a=25,b=133。 )(s Gp 可表示为如下状态方程: Bu Ax x += 其中???=00A ???-251,?? ? ???=1330B 。在仿真程序中,M=1为等速趋近律,M=2为指数趋近律,M=3为幂次趋近律,M=4为一般趋近律。取M=2,采用指数趋近律,其中C=[15,1],ε=5,k=10,作图取样时间为0.001,仿真程序如下。二、程序主程序chap2_4.m clear all;close all;
global M A B C eq k ts=0.001; T=2; TimeSet=[0:ts:T]; c=15; C=[c,1]; para=[c]; [t,x]=ode45('chap2_4eq',TimeSet,[0.500.50],[],para); x1=x(:,1); x2=x(:,2); s=c*x(:,1)+x(:,2); if M==2 for kk=1:1:T/ts+1 xk=[x1(kk);x2(kk)]; sk(kk)=c*x1(kk)+x2(kk); slaw(kk)=-eq*sign(sk(kk))-k*sk(kk);%Exponential trending law u(kk)=inv(C*B)*(-C*A*xk+slaw(kk)); end end figure(1); plot(x(:,1),x(:,2),'r',x(:,1),-c*x(:,1),'b'); xlabel('x1');ylabel('x2'); figure(2); plot(t,x(:,1),'r'); xlabel('time(s)');ylabel('x1'); figure(3); plot(t,x(:,2),'r'); xlabel('time(s)');ylabel('x2'); figure(4); plot(t,s,'r');
基于比例切换函数的滑模控制 一、仿真实例 考虑如下时变对象: as s b s Gp +=2)( (2.29) 其中255sin(6)a t π=+,13350sin(2)b t π=+ 将传递函数描述为状态方程的形式: Bu Ax x += (2.30) 其中A=???00 ???-a 1 , B=?? ????b 0 采用基于比例的切换函数控制方法,1S =为阶跃响应,2S =为正弦响应。在控制律中,取30c =,500α=,10β=。 二、仿真主程序: 主程序:chap2_1.m clear all; close all; global S A F c alfa beta xk=[0,0]; ts=0.001; T=1; TimeSet=[0:ts:T]; [t,y]=ode45('chap2_1eq',TimeSet,xk,[],[]); x1=y(:,1); x2=y(:,2); if S==1 rin=1.0; drin=0; elseif S==2 rin=A*sin(F*2*pi*t);
drin=A*F*2*pi*cos(F*2*pi*t); end e1=rin-x1; e2=drin-x2; s=c*e1+e2; for k=1:1:T/ts+1 u(k)=(alfa*abs(e1(k))+beta*abs(e2(k)))*sign(s(k)); end figure(1); plot(t,rin,'r',t,y(:,1),'b'); xlabel('time(s)');ylabel('Position tracking'); figure(2); plot(t,u,'r'); xlabel('time(s)');ylabel('u'); figure(3); plot(e1,e2,'r',e1,-c*e1,'b'); xlabel('time(s)');ylabel('Phase trajectory'); 控制子程序:chap2_leq.m function dx=PlantModel(t,x,flag,para) global S A F c alfa beta dx=zeros(2,1); S=1; %S=1时为阶跃响应,S=2时为正弦响应% if S==1 rin=1.0; drin=0; elseif S==2 A=0.5;F=3; rin=A*sin(F*2*pi*t); drin=A*F*2*pi*cos(F*2*pi*t); end c=30; alfa=500; beta=10; e1=rin-x(1); e2=drin-x(2);
无刷直流电机的滑模控制器的设计与仿真 摘要 舵伺服系统在航空航天领域,有着广泛应用和重要的研究价值。应用无刷直流电机作为舵系统执行器,可以增大系统输出转矩,实现系统小型化。本文基于无刷直流电机执行器,利用 DSP 与 FPGA 结合的核心处理单元,应用滑模变结构控制策略,实现舵机系统伺服,提高舵系统抗扰性和信号响应的快速性;并在系统中加入滑模观测器,实现对于系统内部状态量的观测,为实现无位置传感器控制提供条件本文应用无刷直流电机作为舵系统执行器,通过分析和设计滑模变结构控制算法,实现舵系统位置伺服控制,利用滑模变结构控制策略的特性,提高系统对于扰动和内部参数摄动的鲁棒性,与基于传统控制策略的伺服机构相比,系统的抗扰性得到了提高。并在系统中引入滑模观测器,利用电流、电压传感器采样相电流和相电压作为该观测器的给定量,观测出电机的速度,转子运动换相位置信号和三相反电动势波形,从而实现电机的无位置传感器控制。 本文通过分析舵伺服机构的主要结构和工作原理,根据实际系统技术要求,设计出基于电动伺服系统的数字控制器。利用 DSP 强大的数据处理能力和 FPGA 并行运算能力,实现设计的控制算法,提高舵系统的性能。通过 MATLAB 中 Simulink 环境下构建理想系统模型,应用滑模控制算法,进行模型仿真。通过系统仿真分析,设计出满足离散系统的滑模控制器参数。通过 DSP 与 FPGA 结合的核心处理单元实现滑模变结构控制算法,应用于舵伺服系统中[1]。最后,通过完成整体硬件与软件平台设计,实现对舵伺服系统的控制。通过仿真和实验结果分析,验证了滑模控制具有强鲁棒性和抗扰性,满足舵系统对于快速性和抗扰性的技术要求,提高了系统 整体控制性能。 关键字:滑模控制;滑模观测器;无刷直流电机;舵伺服系统;DSP+FPGA
滑模变结构控制作为一种特殊的鲁棒控制方法【原理,优点,意义,步骤,特点】 变结构控制系统的特征是具有一套反馈控制律和一个决策规则,该决策规则就是所谓的切换函数,将其作为输入来衡量当前系统的运动状态,并决定在该瞬间系统所应采取的反馈控制律,结果形成了变结构控制系统。该变结构系统由若干个子系统连接而成,每个子系统有其固定的控制结构且仅在特定的区域内起作用。引进这种变结构特性的优势之一是系统具有每一个结构有用的特性,并可进一步使系统具有单独每个结构都没有的新的特性,这种新的特性即是变结构系统的滑动模态。滑动模态的存在,使得系统在滑动模态下不仅保持对系统结构不确定性、参数不确定性以及外界干扰等不确定性因素的鲁棒性,而且可以获得较为满意的动态性能。迄今为止,变结构控制理论已经历了50年的发展历程,形成了自己的体系,成为自动控制系统中一种一般的设计方法。它适用的控制任务有镇定与运动跟踪等。 滑模控制(sliding mode control, SMC)也叫变结构控制,本质上是一类特殊的非线性控制,且非线性表现为控制的不连续性。这种控制策略与其他控制的不同之处在于系统的“结构”并不固定,而是可以在动态过程中,根据系统当前的状态(如偏差及其各阶导数等)有目的地不断变化,迫使系统按照预定“滑动模态”的状态轨迹运动。由于滑动模态可以进行设计且与对象参数及扰动无关,这就使得滑模控制具有快速响应、对应参数变化及扰动不灵敏、无需系统在线辨识、物理实现简单等优点。 原理: 滑模变结构控制的原理,是根据系统所期望的动态特性来设计系统的切换超平面,通过滑动模态控制器使系统状态从超平面之外向切换超平面收束。系统一旦到达切换超平面,控制作用将保证系统沿切换超平面到达系统原点,这一沿切换超平面向原点滑动的过程称为滑模控制。由于系统的特性和参数只取决于设计的切换超平面而与外界干扰没有关系,所以滑模变结构控制具有很强的鲁棒性。所设计的切换超平面需满足达到条件,即系统在滑模平面后将保持在该平面的条件。现在以N维状态空间模型为例,采用极点配置方法得到M(N 基于趋近律的滑模控制 一、基于趋近律的滑模控制 1、控制器的设计 针对状态方程 Bu Ax x += (1) 采用趋近律的控制方式,控制律推导如下: Cx s = (2) slaw x C s == (3) 其中slaw 为趋近律。 将状态方程式(1)代人(2)得 )()(1s CAx CB u +-=- (4) 可见,控制器的抖振程度取决于趋近律s 表达式中的切换项。 2、仿真实例 对象为二阶传递函数: as s b s G p +=2 )( 其中a=25, b=133。 )(s Gp 可表示为如下状态方程: Bu Ax x += 其中???=00A ?? ? -251 , ??????=1330B 。 在仿真程序中,M=1为等速趋近律,M=2为指数趋近律,M=3为幂次趋近律,M=4为一般趋近律。取M=2,采用指数趋近律,其中C=[15,1] , ε=5,k=10,作图取样时间为0.001,仿真程序如下。 二、程序 主程序chap2_4.m clear all; close all; global M A B C eq k ts=0.001; T=2; TimeSet=[0:ts:T]; c=15; C=[c,1]; para=[c]; [t,x]=ode45('chap2_4eq',TimeSet,[0.50 0.50],[],para); x1=x(:,1); x2=x(:,2); s=c*x(:,1)+x(:,2); if M==2 for kk=1:1:T/ts+1 xk=[x1(kk);x2(kk)]; sk(kk)=c*x1(kk)+x2(kk); slaw(kk)=-eq*sign(sk(kk))-k*sk(kk); %Exponential trending law u(kk)=inv(C*B)*(-C*A*xk+slaw(kk)); end end figure(1); plot(x(:,1),x(:,2),'r',x(:,1),-c*x(:,1),'b'); xlabel('x1');ylabel('x2'); figure(2); plot(t,x(:,1),'r'); xlabel('time(s)');ylabel('x1'); figure(3); plot(t,x(:,2),'r'); xlabel('time(s)');ylabel('x2'); 第24卷第3期2007年6月 控制理论与应用 Control Theory&Applications V ol.24No.3 Jun.2007滑模变结构控制理论及其算法研究与进展 刘金琨1,孙富春2 (1.北京航空航天大学自动化与电气工程学院,北京100083;2.清华大学智能技术与系统国家重点实验室,北京100084) 摘要:针对近年来滑模变结构控制的发展状况,将滑模变结构控制分为18个研究方向,即滑模控制的消除抖振问题、准滑动模态控制、基于趋近律的滑模控制、离散系统滑模控制、自适应滑模控制、非匹配不确定性系统滑模控制、时滞系统滑模控制、非线性系统滑模控制、Terminal滑模控制、全鲁棒滑模控制、滑模观测器、神经网络滑模控制、模糊滑模控制、动态滑模控制、积分滑模控制和随机系统的滑模控制等.对每个方向的研究状况进行了分析和说明.最后对滑模控制的未来发展作了几点展望. 关键词:滑模控制;鲁棒控制;抖振 中图分类号:TP273文献标识码:A Research and development on theory and algorithms of sliding mode control LIU Jin-kun1,SUN Fu-chun2 (1.School of Automation Science&Electrical Engineering,Beijing University of Aeronautics and Astronautics,Beijing100083,China; 2.State Key Laboratory of Intelligent Technology and Systems,Tsinghua University,Beijing100084,China) Abstract:According to the development of sliding mode control(SMC)in recent years,the SMC domain is character-ized by eighteen directions.These directions are chattering free of SMC,quasi SMC,trending law SMC,discrete SMC, adaptive SMC,SMC for mismatched uncertain systems,SMC for nonlinear systems,time-delay SMC,terminal SMC, global robust SMC,sliding mode observer,neural SMC,fuzzy SMC,dynamic SMC,integral SMC and SMC for stochastic systems,etc.The evolution of each direction is introduced and analyzed.Finally,further research directions are discussed in detail. Key words:sliding mode control;robust control;chattering 文章编号:1000?8152(2007)03?0407?12 1引言(Introduction) 滑模变结构控制本质上是一类特殊的非线性控制,其非线性表现为控制的不连续性,这种控制策略与其它控制的不同之处在于系统的“结构”并不固定,而是可以在动态过程中根据系统当前的状态(如偏差及其各阶导数等)有目的地不断变化,迫使系统按照预定“滑动模态”的状态轨迹运动.由于滑动模态可以进行设计且与对象参数及扰动无关,这就使得变结构控制具有快速响应、对参数变化及扰动不灵敏、无需系统在线辩识,物理实现简单等优点.该方法的缺点在于当状态轨迹到达滑模面后,难于严格地沿着滑模面向着平衡点滑动,而是在滑模面两侧来回穿越,从而产生颤动. 滑模变结构控制出现于20世纪50年代,经历了50余年的发展,已形成了一个相对独立的研究分支,成为自动控制系统的一种一般的设计方法.以滑模为基础的变结构控制系统理论经历了3个发展阶段.第1阶段为以误差及其导数为状态变量研究单输入单输出线性对象的变结构控制;20世纪60年代末开始了变结构控制理论研究的第2阶段,研究的对象扩大到多输入多输出系统和非线性系统;进入80年代以来,随着计算机、大功率电子切换器件、机器人及电机等技术的迅速发展,变结构控制的理论和应用研究开始进入了一个新的阶段,所研究的对象已涉及到离散系统、分布参数系统、滞后系统、非线性大系统及非完整力学系统等众多复杂系统,同时,自适应控制、神经网络、模糊控制及遗传算法等先进方法也被应用于滑模变结构控制系统的设计中. 2滑模变结构控制理论研究进展(Develop-ment for SMC) 2.1消除滑模变结构控制抖振的方法研 究(Research on chattering elimination of SMC) 2.1.1滑模变结构控制的抖振问题(Problems of SMC chattering) 从理论角度,在一定意义上,由于滑动模态可以 收稿日期:2005?10?19;收修改稿日期:2006?02?23. 基金项目:国家自然科学基金资助项目(60474025,90405017). 四旋翼无人机设与滑模控制仿真 ————————————————————————————————作者:————————————————————————————————日期: 四旋翼无人机设计与滑模控制仿真-电气论文 四旋翼无人机设计与滑模控制仿真 尤元1,李闻先2 (1.长春工业大学,吉林长春130012;2.中国科学院长春光学精密机械与物理研究所,吉林长春130033) 摘要:随着近些年自然灾害的频繁发生,四旋翼飞行器搜救设备得到越来越广泛的应用。首先介绍四旋翼飞行系统的总体设计架构,然后针对地面坐标系与集体坐标系建立了四轴飞行器的动态模型,同时为得到良好的响应速度、控制稳定度与鲁棒性,应用滑模变结构控制理论设计了飞行器的控制算法。最后通过仿真数据对相同条件下的PID控制器与该控制器对比,证明该控制器的强鲁棒性和控制稳定性满足项目任务需求。 关键词:四旋翼飞行器;滑模变结构控制;PID控制;建模仿真 中图分类号:TN964?34;V249.1 文献标识码:A 文章编号:1004?373X (2015)15?0080?04 收稿日期:2015?02?09 基金项目:吉林省重点科技攻关项目(20140204044SF) 0 引言 四旋翼飞行器是有四个旋翼呈刚性十字结构的一种飞行装置,它通过控制四个旋翼的速度来实现垂直起降、自主悬停以及姿态控制等动作。因其具有适应复杂环境的能力、可低速飞行、机体结构简单、制造成本低等优点,可广泛应用于军事侦察、自然灾害搜救遥感、高空拍摄等军用与民用领域。随着新型材料的应用、微处理器技术的进步、传感器工艺的提高,电池续航能力的提升以及动力 滑模变结构控制 【原理,优点,意义,步骤,特点】 变结构控制系统的特征是具有一套反馈控制律和一个决策规则,该决策规则就是所谓的切换函数,将其作为输入来衡量当前系统的运动状态,并决定在该瞬间系统所应采取的反馈控制律,结果形成了变结构控制系统。该变结构系统由若干个子系统连接而成,每个子系统有其固定的控制结构且仅在特定的区域内起作用。引进这种变结构特性的优势之一是系统具有每一个结构有用的特性,并可进一步使系统具有单独每个结构都没有的新的特性,这种新的特性即是变结构系统的滑动模态。滑动模态的存在,使得系统在滑动模态下不仅保持对系统结构不确定性、参数不确定性以及外界干扰等不确定性因素的鲁棒性,而且可以获得较为满意的动态性能。迄今为止,变结构控制理论已经历了50年的发展历程,形成了自己的体系,成为自动控制系统中一种一般的设计方法。它适用的控制任务有镇定与运动跟踪等。滑模控制(sliding mode control, SMC)也叫变结构控制,本质上是一类特殊的非线性控制,且非线性表现为控制的不连续性。这种控制策略与其他控制的不同之处在于系统的“结构”并不固定,而是可以在动态过程中,根据系统当前的状态(如偏差及其各阶导数等)有目的地不断变化,迫使系统按照预定“滑动模态”的状态轨迹运动。由于滑动模态可以进行设计且与对象参数及扰动无关,这就使 得滑模控制具有快速响应、对应参数变化及扰动不灵敏、无需系统在线辨识、物理实现简单等优点。原理:滑模变结构控制的原理,是根据系统所期望的动态特性来设计系统的切换超平面,通过滑动模态控制器使系统状态从超平面之外向切换超平面收束。系统一旦到达切换超平面,控制作用将保证系统沿切换超平面到达系统原点,这一沿切换超平面向原点滑动的过程称为滑模控制。由于系统的特性和参数只取决于设计的切换超平面而与外界干扰没有关系,所以滑模变结构控制具有很强的鲁棒性。所设计的切换超平面需满足达到条件,即系统在滑模平面后将保持在该平面的条件。现在以N维状态空间模型为例,采用极点配置方法得到M(N 滑模控制(sliding mode control, SMC)也叫变结构控制, 其本质上是一类特殊的非线性控制,且非线性表现为控制的不连续性. 这种控制策略与其他控制的不同之处在于系统的“结构”并不固定,而是可以在动态过程中,根据系统当前的状态(如偏差及其各阶导数等)有目的地不断变化,迫使系统按照预定“滑动模态”的状态轨迹运动. 由于滑动模态可以进行设计且与对象 参数及扰动无关,这就使得滑模控制具有快速响应、对应参数变化及扰动不灵敏、无需系统在线辨识、物理实现简单等优点. 滑模变结构控制是根据系统所期望的动态特性来设计系统的切换超平面,通过滑动模态控制器使系统状态从超平面之外向切换超平面收束。系统一旦到达切换超平面,控制作用将保证系统沿切换超平面到达系统原点,这一沿切换超平面向原点滑动的过程称为滑模控制。由于系统的特性和参数只取决于设计的切换超平面而与外界干扰没有关系,所以滑模变结构控制具有很强的鲁棒性。超平面的设计方法有极点配置,特征向量配置设计法,最优化设计方法等,所设计的切换超平面需满足达到条件,即系统在滑模平面后将保持在该平面的条件。控制器的设计有固定顺序控制器设计、自由顺序控制器设计和最终滑动控制器设计等设计方法[1]。现在以N维状态空间模型为例,采用极点配置方法得到M(N 步骤一:确定状态变量(分为单输入系统和多输入系统)以及状态变量之间的关系 比如永磁同步电机速度滑模变结构控制: 状态变量为: 状态变量之间的关系(可以通过电机的电压,磁链,转矩和运动学方程推导)比如确定如上x1,x2以及系统的关系,可根据如下方程(其中有错误注意): 得到状态关系方程(其中a为常数与电机参数有关): 永磁同步电机位置滑模变结构控制: 状态变量为: 步骤二:确定滑动面方程(切换函数S) 必须确保滑动模态在S = 0时t趋近于无穷大是稳定的。(根据实际情况确保品质参数),其表达式如下: 这种切换函数下得到的响应是过阻尼响应,理论上是不存在超调量的。 对于多输入系统,其切换函数为: 步骤三: 方法一:确定趋近率函数(切换函数的微分S’),并确定滑模变结构控制的输出量即控制率函数Ux(Ux)。另外,需要由电机方程指定该控制率函数和电机系统变量的关系(实际需要决定)(比如:速度滑模变结构的输出肯定是与电机电流iq是有关系的,从而便于下一步的电流逆变器的控制)。 常见的趋近率函数为: 其他特殊的更常用的趋近律如下: 如此可确定控制率函数的表达式。(本质上控制率函数是用来去除系统参数变化和外部扰动对系统的影响。) 该方法的缺点是:由于系统在滑动面上对参数及系统外部扰动的抗干扰性很强。而在滑动面外(趋近运动),控制率函数在起作用,而控制率函数是与系统参数有关的。所以收到系统参数的影响。为了能够实现系统一直具有很高的鲁棒性,可以使系统设置从初始时刻就处于滑动面上,见方法二(全局滑模变结构控制)。 方法二:合适选择切换函数并先确定控制率函数Ux。(由于系统一直处于滑动面上,所以无需选择趋近率函数) 比如PMSM的速度滑模变结构控制: 滑模变结构理论 一、引言 滑模变结构控制本质上是一类特殊的非线性控制,其非线性表现为控制的不连续性,这种控制策略与其它控制的不同之处在于系统的“结 构”并不固定,而是可以在动态过程中根据系统当前的状态(如偏差及其 各阶导数等)有目的地不断变化,迫使系统按照预定“滑动模态”的状态 轨迹运动。由于滑动模态可以进行设计且与对象参数及扰动无关,这就使 得变结构控制具有快速响应、对参数变化及扰动不灵敏、无需系统在线 辩识,物理实现简单等优点。该方法的缺点在于当状态轨迹到达滑模面后,难于严格地沿着滑模面向着平衡点滑动,而是在滑模面两侧来回穿越, 从而产生颤动。滑模变结构控制出现于20世纪50年代,经历了 50余年 的发展,已形成了一个相对独立的研究分支,成为自动控制系统的一种一 般的设计方法。以滑模为基础的变结构控制系统理论经历了 3个发展阶 段.第1阶段为以误差及其导数为状态变量研究单输入单输出线性对象的 变结构控制; 20世纪60年代末开始了变结构控制理论研究的第2阶段, 研究的对象扩大到多输入多输出系统和非线性系统;进入80年代以来, 随着计算机、大功率电子切换器件、机器人及电机等技术的迅速发展, 变 结构控制的理论和应用研究开始进入了一个新的阶段, 所研究的对象已 涉及到离散系统、分布参数系统、滞后系统、非线性大系统及非完整力 学系统等众多复杂系统, 同时,自适应控制、神经网络、模糊控制及遗传 算法等先进方法也被应用于滑模变结构控制系统的设计中。 二、基本原理 带有滑动模态的变结构控制叫做滑模变结构控制(滑模控制)。所谓滑动模态是指系统的状态被限制在某一子流形上运动。通常情况下,系统 的初始状态未必在该子流形上,变结构控制器的作用在于将系统的状态 轨迹于有限时间内趋使到并维持在该子流形上,这个过程称为可达性。系 统的状态轨迹在滑动模态上运动并最终趋于原点,这个过程称为滑模运 动。滑模运动的优点在于,系统对不确定参数和匹配干扰完全不敏感。下 图简要地描述了滑模变结构控制系统的运动过程,其中S(t)为构造的切 换函数(滑模函数), S(t)=0为滑模面。基于趋近律的滑模控制matlab仿真实例
滑模变结构控制理论及其算法研究与进展_刘金琨
四旋翼无人机设与滑模控制仿真
滑模变结构控制
滑模控制
滑模变结构控制(SMC)的基本思路
滑模控制
相关主题
文本预览