
固定翼首次设置
本文由CUAV-BIN编写,有些内容摘自WIKI
https://www.doczj.com/doc/8b6319399.html, https://www.doczj.com/doc/8b6319399.html,
看此文章之前,请先了解好如何接线,以及刷好了固定翼固件,如果还不了解,请返回看入门篇。
固定翼设置主要就是分为这么几个步骤:
1.校准遥控
2.设置飞行模式
3.检查舵面反应是否正确
4.如果是常见机型,导入官方PID参数
联机设置一定不能上动力电池或者螺旋桨,这个非常重要的安全习惯
与地面站进行链接
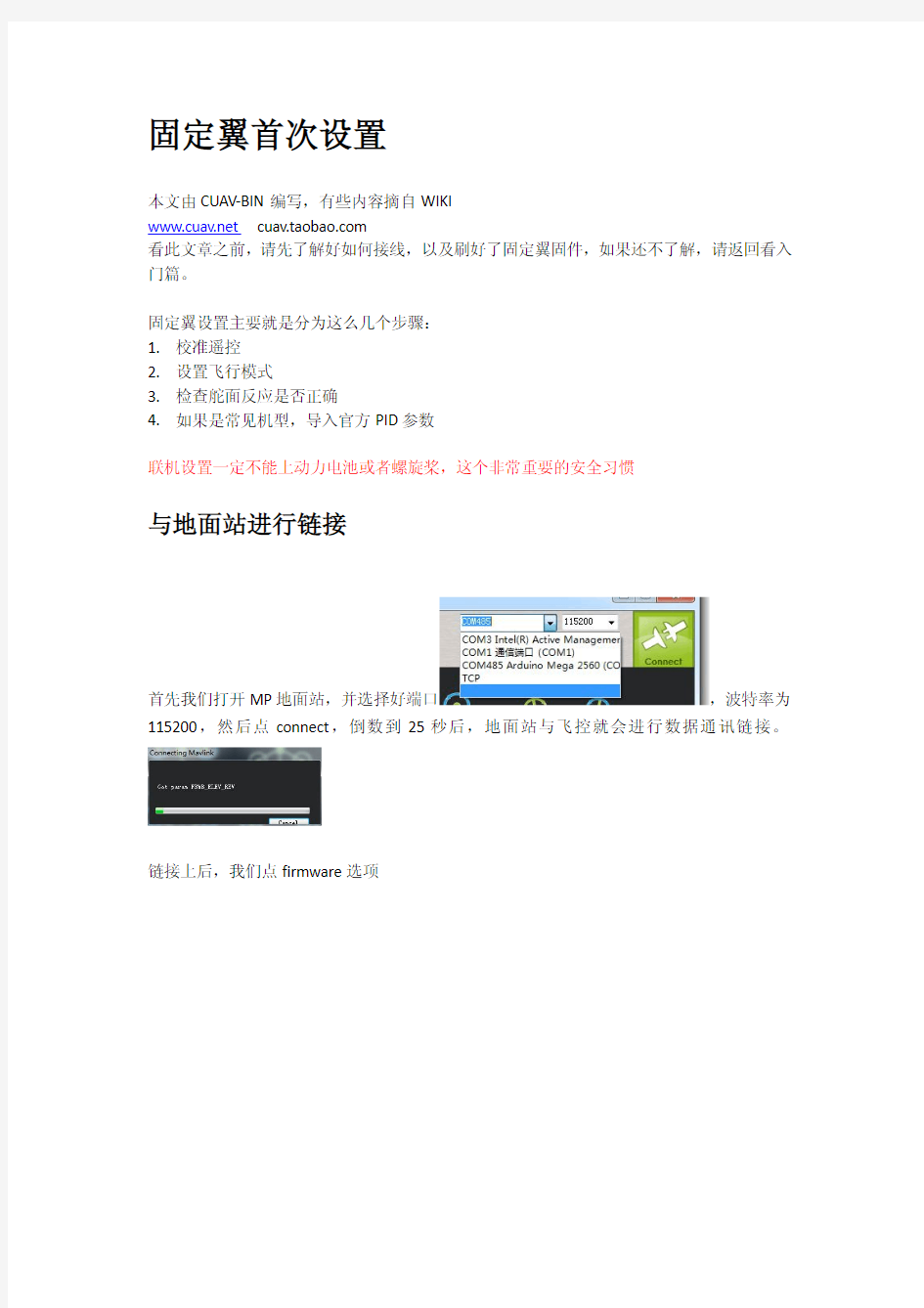
首先我们打开MP地面站,并选择好端口,波特率为115200,然后点connect,倒数到25秒后,地面站与飞控就会进行数据通讯链接。
链接上后,我们点firmware选项
之后会弹出一个功能框,我们只需要从第一个开始往下做即可
1:RADIO calibration遥控器校准
校准前,请确保接收机与飞控正确插好。
一般情况,接收机1-4通道接入APM INPUT1-4
然后接收机设置一个三段或者2段开关到指定通道,接入APM INPUT8,in8为飞行模式切换
通道
校准遥控前,需要把油门行程的最小值调整到1100+一点,很重要,可能会导致你的电调无法启动的问题(这个请看遥控说明书,一般都有菜单进行调整)
你可以在这个界面波动遥控器摇杆,就会看见对应的通道的绿色条会动,如果对应的数值条
正确后,我们开始点校准遥控
然后会提示
叫你不要连着动力电池和螺旋桨来做校准,以免发生意外,这个是很重要安全习惯
我们点OK
然后可以看见有红色的线条出现
然后我们开始打杆,你会发现绿色的条会推动红色的线条
这是由于标示每个通道的最大值和最小值
我们只需要把1-4和模式切换开关都往最大最小值打一次
正确的数值应该是如下图一样的,最大不超2000,最小值在1100左右
确认没错后,我们点
然后提示
CH1-CH4CH8都有最大值最小值提示,如图才是正确的,然后我们点OK,就会自动保存
下面设置飞行模式
飞行模式设置
切到Flight modes
然后拨动设置好的三段开关
你会发现会以绿色去选中一个模式
而飞行模式6是固定为手动模式,是无法更改的,必须要的
如果需要更换为其他模式,只需要点下拉框,然后选中需要的模式,最后点保存即可,
新手推荐增稳和RTL模式
关于模式的介绍可以看下表
模式
手动(MANUAL)
常规遥控,没有稳定功能。
增稳(STABILIZE)
增稳的遥控,放开摇杆则水平飞行。
线操纵A(FLY BY WIRE_A)
飞控将保持控制杆指定的侧倾和俯仰角度。油门手动控制。飞机不会侧倾超过配置中设定的极限角度。易于新手学习飞行。
线操纵B(FLY BY WIRE_A)
需要空速传感器。飞控将保持控制感指定的侧倾角度。遥控输入的俯仰值被转换为高度差,飞控将尽力修正匹配该高度。油门由飞控自动控制。该模式是测试自动飞控的最佳模式,因为遥控输入被导航控制取代了。
自动(AUTO)
飞机将沿着指定的GPS航点飞行。在此模式中你也可以人工微调。
返航(RTL)
飞机将返回起飞点并在上空盘旋,直至重新获得人工控制。在此模式中你也可以人工微调。
游荡(LOITER)
飞机将在当前位置盘旋。在此模式中你也可以人工微调。
高级模式
起飞(TAKEOFF)
自动起飞只能由飞行控制脚本设置。油门是人工控制的(它反映了自动飞控中设置的极限值。如果你设置65%为最大值,那么它不会超过65%)。当飞机超过一定速度时,它将锁定方向直至达到预定的高度。
降落(LAND)
自动降落只能由飞行控制脚本设置。油门由自动飞控控制。在接近30m时,飞机将保值当前方向。Flare,油门、襟翼、起落架和其他时间可以根据降落地点的距离进行编辑。
更详细的介绍看这里
https://www.doczj.com/doc/8b6319399.html,/p/ardupilot-mega/wiki/FlightModes?wl=zh-Hans
失控保护
地面站可以设失控保护,但是我们不推荐你使用这个功能,据玩家反馈使用这个功能,会导致模式会乱跳,没有失控的情况也乱跳
如果你使用数传的话,可以设置地面站失去链接后,进行失控操作,3DR数传用户不推荐,距离太短,没有很大意义
推荐20秒
如果需要遥控失控返航,我们推荐使用接收机内置失控保护
具体可以看遥控器说明书,原理很简单,就是让接收机失控后,让切换模式的通道保持为RTL或者AUTO模式
启用磁罗盘和空速计
Apm2.5.x默认就是启用罗盘的,这选项一般不需要去动,勾上AUTO DEC即可
如果有空速计的话,就勾上空速计选项
空速计它对大风天气、慢速飞行和自动降落有所帮助。但是对于多数用户来说并不推荐使用,因为需要额外的调整,并增加了一层控制需要设置。
它工作的原理是上层管子是"动态"的(测量前端开口的皮托管的气压,空气由于空速压入皮托管),底部管子是“静态”的(测量侧面开口的皮托管的环境气压)空速计是插在APM A0
接口,第一篇已经介绍过连接硬件,这里不在讲
DIY空速管很简单
空速计有2个孔,上面为动压孔下面的为静压孔
动压孔只需要取一根空水笔芯,套上硅胶管,然后伸出机头即可
而静压管,也用一根空的水笔芯,套上硅胶管后,塞住前面的孔,然后在侧边开4个大概1mm的小孔即可。
使用电压电流传感器
CUAV版本的传感器,使用的是1.25的端子线
首先我们要把电源插头焊接好,如果是注意IN及OUT方向
IN就是电池输入,OUT就是电调输出,请勿接反
焊接好电池插头头,务必使用万用表的导通档,测量正负2级是否有短路现象,以免出意外,很重要
配送的端子线,2端都是一样的插头,无需区别,把其中一段插入电压电流传感器上面端子座,然后另一端插入APM的PM接口
,端子插头都是防插反设计,请勿暴力插入。插反是插不进去的
然后我们连接上去后,在地面站的configuration选择,按照下图选择好传感器即可,无需其他设置
因为这是模拟传感器,关系到采样电阻的问题,可能不一定完全非常准确,当然也可以自己进行校准,可以按下图进行简单校准,输入电压是不需要变动的,安培伏特为18.0018,测量的电池电压,请用万用表量电池总电压,然后填进去即可。
起飞前准备:
第一次试飞,我们不推荐飞auto模式,推荐你先试飞增稳和RTL
现在可以把APM2.5装入你的飞机了
常规固定翼
根据下图颜色,可以很明白看出每个通道对应的插线,请认真检查
常规固定翼一般由4个舵机,分别控制副翼升降方向舵,3通机型2个舵机分别控制升降方向。
飞翼一般为2个舵机混控,分别控制升降方向
按上图安装到飞机上面后,我们需要检查一下舵机控制是否正确
检查遥控/APM通道控制是否正确
1.检查升降方向副翼通道是否可以对应的上,如果对应不上,检查接收机或者舵机插线
2.检查控制有没反向,检查反向的流程是,最好使用数传连接上地面站,先切到manual模式,进行检查每个通道如升降副翼方向是否正确,如果反向了,请进行设置遥控通道反向
3.切到增稳模式STABILIZE,我们倾斜飞机,飞机反应应该是相反补偿的,如果不正确,点在radio 选项进行选择单独通道的逆转
点了逆转是自动保存的。
检测好遥控通道及自动增稳补偿正确后,就可以进行首次的飞行了
首次飞行建议先使用增稳飞行,然后再进行RTL返航测试,看是否正常,如果不正常请及时切换到手动
本文由CUAV-BIN编写,有些内容摘自WIKI
https://www.doczj.com/doc/8b6319399.html, https://www.doczj.com/doc/8b6319399.html,
导入常见机型PID
APM官方提供了一些常见机型的PID,我们可以导入进去,再自行简单调整后,即可达到比较好的飞行效果
常见的机型有:天行者冲浪者天狼星MAJI等,
在wiki
https://www.doczj.com/doc/8b6319399.html,/p/ardupilot-mega/downloads
下载列表里边查找这些机型的PID
下面我们以天行者为例:
https://www.doczj.com/doc/8b6319399.html,/p/ardupilot-mega/downloads/detail?name=skywalker.param&can=2&q=需要连接上飞控后。打开这个高级列表菜单
点LOAD加载下载好的文件
点YES就行了
往下拉可以看见天行者PID更改了什么参数
高级用户看的,新手慢慢来
点即可写入参数
写入参数后,还有很重要的步骤就是,需要重新设置一切东西,遥控校准校准电调检查飞机舵机反应等等,因为参数文件包含了一切设置。不重新设置是不能飞的,注意了
航点规划
我们不建议新手初次飞行就进行飞航点,新手还是先飞增稳和返航正常后,再进行飞行航点
航点最好是在飞场飞机定位成功后,进行设置,这样可以直接读取到当前位置的地图,而不需要慢慢找
很多朋友发现,为什么这地图没有文字
其实地图是可以换中文带标的地图,但是不推荐更换地图,因为中文地图太坑爹,误差几百米,还有可能上千米的误差
所以还是别去换地图,默认地图是这个
说明
你可以输入航点和其他命令(参见下面的完整列表)。在每行的下拉菜单中,选择需要的命令。列的标题将自动改变,提示需要的数据。经度和纬度可以通过在地图上点击来输入。高度是相对于你的起飞地点的相对值,也就是说,如果你设为100m,它就在你上方100m处飞行。
你可以直接点击地图上Home的lat或lon就可以设定定的位置。或者,如果地图还尚未加载你飞行的地点,你可以直接使用"Zoom To"的按钮搜寻它,也可以在搜寻的框框输入你的位置,如下所示:
注意,如果选上了「绝对高度(Absolute Alt)」复选框,高度值将使用海拔高度,而不是相对于起飞位置的高度。如果没选上,ALT就是相对高度。
Default Alt是输入新的航点时的默认高度。如果你选择了"Hold Default ALT",那么它也是返航模式时的高度;否则飞机将保持切换到返航模式时的高度。
Verify height意味着任务规划器将使用Google Earth地理数据,根据每个航点下地面高度调整飞行高度。因此如果你的航点在山上,选择该选项时,任务规划器将根据山的高度增加飞行高度设置。这是一个保证不撞山的好办法!
当你完成任务设计后,点击「Write」按钮,它将发送给APM并保存在存储器中。如果你想确认它是否是你所需要的,点击「Read」按钮。
你可以将任务保存到本地硬盘中。点击右键选择「Save WP File」按钮储存航点,读取航点则点击「Load WP File」按钮。
自动排列
你也可以用Mission Planner为你建立一个有用的地图任务,飞机只会来回飞行如"割草机"的方式收集一个区块的照片。
可以这么做,在右键选单中选择Polygon并在你想要拍摄的地方画出一个箱型区块。然后选择Auto WP,Grid。依循提示讯息选择高度及区域。Mission Planner将会产生像这样的任务:
基本航点命令
任务文件看起来有点吓人,但却是自驾仪的一种强大的脚本语言。(记住地面站很快将为你处理这一切,很快你就不需要看到这些东西了!)。
你可以加上任意数量的命令,从预定义类型到自定义类型。下面是一些常用的命令:?{NAV_WAYPOINT n/a,高度,纬度,经度}
?{NAV_TAKEOFF仰角,目标高度}
?{NAV_LAND_WP n/a,高度,纬度,经度}
?{DO_JUMP航点,n/a,重复的次数,n/a}到达某一航点并且在那里回复任务。设定任何大于1的重复次数让任务多次原行。或都设为-1为一直不停的重复。可以一直重复任务。
(Note:DO_xxx命令目前需要一个假航点放置之后的命令
eg:
WAYPOINT_1
DO_SET_HOME
?预取:你可以缓存地图数据,以便在外场飞行时不需要连接到互联网。单击「预取」按钮,按住Alt,画一个框,就可以下载选择区域内的地图图像。
?网格:这允许你绘制一个区域(用右键),并自动创建航点,覆盖选择的区域。
?把起始地点设置到当前地点也很容易,只要点击输入起始地点位置上的「起始地点」标签,就会自动将起始地点设为当前坐标。
?点击右键选择Measure Distance就可以量测两个航点间的距离。
自动生成航拍航点
如果你正在进行航拍,需要取得大量的图片以便你之后能够接合在一起,Mission Planner有个很方便的功能可以帮助你。我们称为AutoWP,它会自动建立航点让你的UAV在某个区域上建立"地毯式搜索",在既定的航点上触发你的相机拍照。
要使用这项功能请进入Flight Planner画面并按下鼠标右键,选择"Draw Polygon"。
在你想要拍照的区域规画一个多边形,选择"Auto WP"然后可以使用下列两种Grid或Grid V2 (第一次启动会在你的区域的底部,而第二次启动则会在顶部)
直升飞机飞行原理 直升机的机翼与固定翼飞机一样,当气流从机翼前缘流向机翼后缘,从上翼面流过的气流比下翼面走过的路程长,为避免出现真空,上翼面的气流流速比下翼面的大。根据伯努利方程,相同条件下,气流的静压与动压的和恒定,因为上翼面的气流的流速大,导致动压大,所以其静压就小,机翼收到来自上翼面的压力小于来自下翼面的压力,大气对机翼的总压力向上,这个压力就是升力,有了升力直升机就能飞起来,但机翼旋转会对机身产生扭矩,为了不使机身旋转,通过加尾浆的方式平衡掉这个扭矩,所以直升机都是有尾浆的。直升机的机翼旋转面和轴的夹角可以通过杠杆机构来调整,通过调整这个夹角使升力与直升机的重力同轴或不同轴,同轴时,直升机悬停,不同轴时,直升机前飞 直升机升空的原理和竹蜻蜓是一样的,主桨桨叶上产生升力。至于你说的玩具有两个桨,而真机只有一个,应该是上下两层吧,总共四片桨叶,而真机只有一层。都知道,主桨高速转动,会给机身一个反方向的扭矩,如果不加以平衡,机身就会沿着和主桨转动方向相反的方向高速自旋,这样的直升机能飞么?玩具的两层桨叶就是平衡这个扭矩的,你仔细观察下,上下桨的转动方向一定是相反的,也就是靠两对桨叶给机身的扭矩来平衡机身,它们给机身的扭矩方向是相反的,如果大小也相同,那么机身就能保持稳定。但是真机,或者真正的航模直升机,都是单层桨叶的,因为它们都带尾桨,靠尾桨产生的推力来稳住机身。主桨产生的扭矩如果会使机尾顺时针旋转,那么就让尾桨产生逆时针的推力,平衡这个顺时针的扭矩。
一、直升机与普通飞机区别及飞行简单原理:不可否认,直升机和飞机有些共同点。比如,都是飞行在大气层中,都重于空气,都是利用空气动力的飞行器,但直升机有诸多独有特性。(1)直升机飞行原理和结构与飞机不同飞机靠它的固定机翼产生升力,而直升机是靠它头上的桨叶(螺旋桨)旋转产生升力。(2)直升机的结构和飞机不同,主要由旋翼、机身、发动机、起落装置和操纵机构等部分组成。根据螺旋桨个数,分为单旋翼式、双旋翼式和多旋翼式。(3)单旋翼式直升机尾部还装有尾翼,其主要作用:抗扭,用以平衡单旋翼产生的反作用力矩和控制直升机的转弯。(4)直升机最显眼的地方是头上窄长的大刀式的旋翼,一般由2~5片桨叶组成一副,由1~2台发动机带动,其主要作用:通过高速的旋转对大气施加向下的巨大的力,然后利用大气的反作用力(相当与直升飞机受到大气向上的力)使飞机能够平稳的悬在空中。二、平衡分析(对单旋翼式):(1)直升飞机的大螺旋桨旋转产生升力平衡重力。直升飞机的桨叶大概有2—3米长,一般有5叶组成。普通飞机是靠翅膀产生升力起飞的,而直升飞机是靠螺旋桨转动,拨动空气产生升力的。直升飞机起飞时,螺旋桨越转越快,产生的升力也越来越大,当升力比飞机的重量还大时,飞机就起飞了。在飞行中飞行员调节高度时,就只要通过改变大螺旋桨旋转的速度就可以了。(2)直升飞机的横向稳定。因为直升飞机如果只有大螺旋桨旋,那么根据动量守衡,机身就也会旋转,因此直升飞机就必须要一个能够阻止机身旋转的装置。而飞机尾部侧面的小型螺旋桨就是起到这个作用,飞机的左转、右转或保持稳定航向都是靠它来完成的。同时为了不使尾桨碰到旋翼,就必须把直升飞机的机身加长,所以,直升飞机有一个像蜻蜓式的长尾巴。三、能量方式分析。根据能量守恒定律可知:能量既不会消失,也不会无中生有,它只能从一种形式转化成为另一种形式。在低速流动的空气中,参与转换的能量只有压力能和动能。一定质量的空气具有一定的压力,能推动物体做功;压力越大,压力能也越大;流动的空气具有动能,流速越大,动能也越大。而空气的流速只有来自于发动机所带的螺旋桨对空气的作用,当然从这里分析 能量也是守衡的
飞行原理(图解) 直升机能够垂直飞起来的基本道理简单,但飞行控制就不简单了。旋翼可以产生升力,但谁来产生前进的推力呢?单独安装另外的推进发动机当然可以,但这样增加重量和总体复杂性,能不能使旋翼同时担当升力和推进作用呢?升力-推进问题解决后,还有转向、俯仰、滚转控制问题。旋翼旋转产生升力的同时,对机身产生反扭力(初中物理:有作用力就一定有反作用力),所以直升机还有一个特有的反扭力控制问题。 直升机主旋翼反扭力的示意图 没有一定的反扭力措施,直升机就要打转转/ 尾桨是抵消反扭力的最常见的方法 直升机抵消反扭力的方案有很多,最常规的是采用尾桨。主旋翼顺时针转,对机身就产生逆
时针方向的反扭力,尾桨就必须或推或拉,产生顺时针方向的推力,以抵消主旋翼的反扭力。 抵消反扭力的主旋翼-尾桨布局,也称常规布局,因为这最常见/ 典型的贝尔407 的尾桨主旋翼当然也可以顺时针旋转,顺时针还是逆时针,两者之间没有优劣之分。有意思的是,美、英、德、意、日直升机的主旋翼都是逆时针旋转,法、俄、中、印、波兰直升机都是顺时针旋转,英、德、意、日的直升机工业都是从美国引进许可证开始的,和美国采用相同的习惯可以理解,中、印、波兰是从前苏联和法国引进许可证开始的,和法、俄的习惯相同也可以理解,但美国和俄罗斯为什么从一开始选定不同的方向,法国为什么不和选美国一样的方向,而和俄罗斯一致,可能只是一个历史的玩笑。
各国直升机主旋翼旋转方向的比较尾桨给直升机的设计带来了很多麻烦。尾桨要是太大了,会打到地上,所以尾桨尺寸受到限制,要提供足够的反扭力,就需要提高转速,这样,尾桨翼尖速度就大,尾桨的噪声就很大。极端情况下,尾桨翼尖速度甚至可以超过音速,形成音爆。尾桨需要安装在尾撑上,尾撑越长,尾桨的力矩越大,反扭力效果越好,但尾撑的重量也越大。为了把动力传递到尾桨,尾撑内需要安装一根长长的传动轴,这又增加了重量和机械复杂性。尾桨是直升机飞行安全的最大挑战,主旋翼失去动力,直升机还可以自旋着陆;但尾桨一旦失去动力,那直升机就要打转转,失去控制。在战斗中,直升机因为尾桨受损而坠毁的概率远远高于因为其他部位被击中的情况。即使不算战损情况,平时使用中,尾桨对地面人员的危险很大,一不小心,附近的人员和器材就会被打到。在居民区或林间空地悬停或起落时,尾桨很容易挂上建筑物、电线、树枝、飞舞物品。 尾桨可以是推式,也可以是拉式,一般认为以推式的效率为高。虽然不管推式还是拉式,气流总是要流经尾撑,但在尾桨加速气流前,低速气流流经尾撑的动能损失较小。尾桨的旋转方向可以顺着主旋翼,也就是说,对于逆时针旋转的主旋翼,尾桨向前转(或者说,从右
固定翼飞机翼型解析 2008-07-18 06:53:50 来源: 作者: 【大中小】评论:3条 翼型的各部分名称如图1所示。翼弦是翼型的基准线,它是前缘点同后缘点的连线。中弧线是指上弧线和下弧线之间的内切圆圆心的连线。 中弧线最大弯度用中弧线最高点到翼弦的距离来表示。在一定的范围内,弯度越大,升阻比越大。但超过了这个范围,阻力就增大的很快,升阻比反而下降。中弧线最高点到翼弦的距离一般是翼弦长的4%~8%中弧线最高点位置同机翼上表面边界层的特性有很大关系。竞时模型飞机翼型的中弧线最高点到前缘的距离一般是翼弦的25%、50%。翼型的最大厚度是指上弧线同下弧线之间内切圆的最大直径。一般来说,厚度越大,阻力也越大。而且在低雷诺数情况下,机翼表面容易保持层流边界层。因此,竞时模型飞机要采用较薄的翼型。翼型最大厚度一股是翼弦的6%、8%。但是,线操纵特技模型飞机例外,它的翼型最大厚度可以达到翼弦的12%、18%。翼型最大厚度位置对机翼上表面边界层特性也有很大影响。翼型前缘半径决定了翼型前部的“尖”或“钝”,前缘半径小,在大迎角下气流容易分离,使模型飞机的稳定性变坏,前缘半径大对稳定性有好处,但阻力又会增大。
常用的模型飞机翼型有对称、双凸、平凸、凹凸,s形等几种,如图2所示 对称翼型的中弧线和翼弦重合,上弧线和下弧线对称。这种翼型阻力系数比较小,但升阻比也小。一般用在线操纵或遥控特技模型飞机上 双凸翼型的上弧线和下弧线都向外凸,但上弧线的弯度比下弧线大。这种翼型比对称翼型的升阻比大。一般用在线操纵竞速或遥控特技模型飞机上 平凸翼型的下弧线是一条直线。这种翼型最大升阻比要比双凸翼型大。一般用在速摩不太高的初级线操纵或遥控模型飞机上 凹凸翼型的下弧线向内凹入。这种翼型能产生较大的升力,升阻比也比较大。广泛用在竞赛留空时间的模型飞机上 S形翼型的中弧线象横放的S形。这种翼型的力矩特性是稳定的,可以用在没有水平尾翼的模型飞机上
第一步,整体设计 1、确定翼型 我们要根据模型飞机的不同用途去选择不同的翼型。翼型很多,好几千种。但归纳起来,飞机的翼型大致分为三种。一是平凸翼型,这种翼型的特点是升力大,尤其是低速飞行时。不过,阻力中庸,且不太适合倒飞。这种翼型主要应用在练习机和像真机上。二是双凸翼型。其中双凸对称翼型的特点是在有一定迎角下产生升力,零度迎角时不产生升力。飞机在正飞和到飞时的机头俯仰变化不大。这种翼型主要应用在特技机上。三是凹凸翼型。这种翼型升力较大,尤其是在慢速时升力表现较其它翼型优异,但阻力也较大。这种翼型主要应用在滑翔机上和特种飞机上。另外,机翼的厚度也是有讲究的。同一个翼型,厚度大的低速升力大,不过阻力也较大。厚度小的低速升力小,不过阻力也较小。实际上就选用翼型而言,它是一个比较复杂、技术含量较高的问题。其基本确定思路是:根据飞行高度、翼弦、飞行速度等参数来确定该飞机所需的雷诺数,再根据相应的雷诺数和您的机型找出合适的翼型。还有,很多真飞机的翼型并不能直接用于模型飞机,等等。这个问题在这就不详述了。机翼常见的形状又分为:矩形翼、后掠翼、三角翼和纺锤翼(椭圆翼)。矩形翼结构简单,制作容易,但是重量较大,适合于低速飞行。后掠翼从翼根到翼梢有渐变,结构复杂,制作也有一定难度。后掠的另一个作用是能在机翼安装角为0度时,产生上反1-2度的上反效果。三角翼制作复杂,翼尖的攻角不好做准确,翼根受力大,根部要做特别加强。这种机翼主要用在高速飞机上。纺锤翼的受力比较均匀,制作难度也不小,这种机翼主要用在像真机上。翼梢的处理。由于机翼下面的压力大于机翼上面的压力,在翼梢处,从下到上就形成了涡流,这种涡流在翼梢处产生诱导阻力,使升力和发动机功率都会受到损失。为了减少翼梢涡流的影响,人们采取改变翼梢形状的办法来解决它。 2、确定机翼的面积 模型飞机能不能飞起来,好不好飞,起飞降落速度快不快,翼载荷非常重要。一般讲,滑翔机的翼载荷在35克/平方分米以下,普通固定翼飞机的翼载荷为35-100克/平方分米,像真机的翼载荷在100克/平方分米,甚至更多。还有,普通固定翼飞机的展弦比应在5-6之间。确定副翼的面积机翼的尺寸确定后,就
一、直升机与普通飞机区别及飞行简单原理: 不可否认,直升机和飞机有些共同点。比如,都是飞行在大气层中,都重于空气,都是利用空气动力的飞行器,但直升机有诸多独有特性。 (1)直升机飞行原理和结构与飞机不同飞机靠它的固定机翼产生升力,而直升机是靠它头上的桨叶(螺旋桨)旋转产生升力。 (2)直升机的结构和飞机不同,主要由旋翼、机身、发动机、起落装置和操纵机构等部分组成。根据螺旋桨个数,分为单旋翼式、双旋翼式和多旋翼式。 (3)单旋翼式直升机尾部还装有尾翼,其主要作用:抗扭,用以平衡单旋翼产生的反作用力矩和控制直升机的转弯。 (4)直升机最显眼的地方是头上窄长的大刀式的旋翼,一般由2~5片桨叶组成一副,由1~2台发动机带动,其主要作用:通过高速的旋转对大气施加向下的巨大的力,然后利用大气的反作用力(相当与直升飞机受到大气向上的力)使飞机能够平稳的悬在空中。 二、平衡分析(对单旋翼式): (1)直升飞机的大螺旋桨旋转产生升力平衡重力。 直升飞机的桨叶大概有2—3米长,一般有5叶组成。普通飞机是靠翅膀产生升力起飞的,而直升飞机是靠螺旋桨转动,拨动空气产生升力的。直升飞机起飞时,螺旋桨越转越快,产生的升力也越来越大,当升力比飞机的重量还大时,飞机就起飞了。在飞行中飞行员调节高度时,就只要通过改变大螺旋桨旋转的速度就可以了。 (2)直升飞机的横向稳定。 因为直升飞机如果只有大螺旋桨旋,那么根据动量守衡,机身就也会旋转,因此直升飞机就必须要一个能够阻止机身旋转的装置。而飞机尾部侧面的小型螺旋桨就是起到这个作用,飞机的左转、右转或保持稳定航向都是靠它来完成的。同时为了不使尾桨碰到旋翼,就必须把直升飞机的机身加长,所以,直升飞机有一个像蜻蜓式的长尾巴。 三、能量方式分析。 根据能量守恒定律可知:能量既不会消失,也不会无中生有,它只能从一种形式转化成为另一种形式。在低速流动的空气中,参与转换的能量只有压力能和动能。一定质量的空气具有一定的压力,能推动物体做功;压力越大,压力能也越大;流动的空气具有动能,流速越大,动能也越大。 而空气的流速只有来自于发动机所带的螺旋桨对空气的作用,当然从这里分析能量也是守衡的。
专题 飞机飞行的力学原理 ? 飞机用途 民用(运输、勘探、农用、消防、拯救等) 军用(歼击、轰炸、侦察、反潜、运输等) ? 飞机动力 螺桨式(活塞螺桨、涡轮螺桨、涡轮轴) 喷气式(涡轮喷气、涡轮风扇、、冲压、火箭等) ? 机翼类型 固定翼(双翼、单翼、矩形翼、后掠翼、前掠翼、三角翼、双三角翼、鸭翼、可变后掠翼等) 旋翼(单旋翼、双旋翼、可倾转旋翼等) ? 举例 歼10飞机:军用歼击机,采用涡轮风扇发动机,机翼类型为鸭翼。 飞机的机翼在飞行中产生升力和阻力 机翼的升力: 2 21Sv C F Y Y ρ= 机翼的阻力: 2 21Sv C F X X ρ= 升力系数C Y 和阻力系数C X :
C Y和C X都与气流方向和机翼运动方向(航向)的夹角有关,这一角度称为迎角。 一般来说,迎角越大,升力和升力系数越大,阻力和阻力系数也越大。当迎角大于某一角度时,升力和升力系数会急剧下降。这一角度称为失速角。 飞机飞行的受力分析:质点情况 ?考虑飞机为一质点,其受力情况为: 升力F Y 阻力F X 重力mg 发动机的推力(或拉力)F ?若飞机在水平方向进行匀速直线运动,则: F = F X F Y = mg 若飞机进行滑翔飞行,其受力情况为:
升力 F Y 阻力 F X 重力 mg 很明显,在理想情况下,升力、阻力、重力三者矢量和为零,滑翔飞机做匀速直线运动。即: R F F mg Y X =+= 2 2 一点奥秘 ?由于:221Sv C F Y Y ρ= 2 21Sv C F X X ρ= 在稳定飞行时:F Y = mg F = F X ?结论: ? 高速飞行器的翼面积较小,低速飞机的翼面积较大。 ? 重型飞机的翼面积较大,轻型飞机的翼面积较小。 ? 高速飞行器阻力系数较小,升力系数也不大。 ? 低速飞行器升力系数较大,阻力系数也较大。 速度和升阻比的测量和计算
模型飞机的组成 模型飞机一般与载人的飞机一样,主要由机翼、尾翼、机身、起落架和发动机等组成。 1、机翼(由主翼及副翼两部分组成)——是模型飞机在飞行时产生升力的装置,并能保持模型飞机飞机飞行时的横侧安定,可控制飞机做出横滚等动作。 A.机翼翼弦的25%~30%处是飞机的重心所在。 B.机翼的形状(即翼型)由翼肋维持,翼肋由前缘、主梁和后缘连起来。 2、尾翼——包括水平尾翼(由水平安定面及升降舵两部分组成)和垂直尾翼(由垂尾安定面及方向舵两部分组成)两部分。水平尾翼可保持模型飞机飞行时的俯仰安定,垂直尾翼保持模型飞机飞行时的方向安定。水平尾翼上的升降舵能控制模型飞机的 升降,垂直尾翼上的方向舵可控制模型飞机的飞行方向。 3、机身——将模型的各部分联结成一个整体的主干部分叫机身。同时机身内可以装 载必要的控制机件,设备和燃料等,即是动力系统和遥控设备的搭载平台。 A.机身一般由几个舱组成,以层板制成的隔框分开。 B.机身里装有动力系统和遥控设备。以油动飞机为例,经典的安装顺序,从机头 到机尾,依次是发动机、油箱、接收机和接收机电池、舵机。
4、起落架——供模型飞机起飞、着陆和停放的装置。前部一个起落架,后面两面三 个起落架叫前三点式;前部两面三个起落架,后面一个起落架叫后三点式。 5、发动机——它是模型飞机产生飞行动力的装置。模型飞机常用的动力装置有:橡筋束、活塞式发动机、喷气式发动机、电动机。 6、螺旋桨——按材料分有塑料桨,碳纤桨,玻纤桨,尼龙桨,木桨。固定翼螺旋桨的参数有长度和螺距两个参数(单位都是英寸)如:19*8的2叶木桨,这桨的长度就是19英寸、螺距就是8英寸。其中螺距指的是螺旋桨每旋转一圈飞机前进的理论值。 7、整流罩(桨罩)——降低风阻、美观大方。 8、舵机——与遥控器接收机搭配一起使用,执行遥控器发射的指令。主要参数是扭力、灵敏度、重量、尺寸。一般一架固定翼汽油飞机至少需要配6个舵机(副翼2个、升 降舵2个、方向舵1个、油门1个)。
直升机操纵原理与固定翼飞机的对比,让你分分钟明白 直升机的操纵原理,与固定翼飞机完全不同。先做个对比,以单旋翼带尾桨直升机为例。固定翼飞机升力以及操纵力矩来源:前飞动力:由发动机直接喷气或螺旋桨产生拉力。升力:由机翼产生。俯仰力矩:由水平尾翼活动舵面产生。滚转力矩:由副翼产生。偏转力矩:由垂直尾翼的活动舵面产生直升机各种力和力矩的来源:前飞动力:由旋翼桨盘前倾产生。升力:由旋翼产生。俯仰力矩:由旋翼桨盘前后倾斜产生。滚转力矩:由旋翼桨盘左右倾斜产生。偏转力矩:由尾桨拉力大小变化产生。结论:两者的动力和操纵力矩产生方式完全不同。固定翼飞机操纵力矩来自于各个可动舵面。直升机除了偏转力矩之外,其余动力和操纵力矩全部来自旋翼。这就自然导致操纵原理与操纵方式的大相径庭。再对比一下飞行员直接面对的操纵设备:固定翼飞机:右手:驾驶杆。(大型机的驾驶盘先忽略吧)左手:油门杆。双脚:脚蹬。直升机:右手:驾驶杆(真名:周期变距杆)左手:总距油门杆。双脚:脚蹬。驾驶杆VS 周期变距杆他们长得样子都是一样的,产生的操纵效果也是一样的,都是用来控制航空器的倾斜和俯仰状态。向前推杆是低头,向后拉杆是抬头,向左压杆是左滚转,向右压杆是右滚转。效果一样的,可是原理不一样。固定翼飞机:驾驶杆的左右运动,带动的是机翼外侧的副翼,前后运动,带动的
是尾部的水平尾翼。直升机:驾驶杆的运动,通过液压动作筒,带动自动倾斜器的不动环向驾驶杆运动的方向倾斜。自动倾斜器上方的动环在跟随旋翼旋转的同时,跟随不动环倾斜,带动变距拉杆运动,使所有桨叶的迎角周期性改变,产生强制挥舞,整个桨盘向驾驶杆运动的方向倾斜,产生操纵力矩。没有接触过直升机原理的话可能不太好理解,只要记住驾驶杆向哪里运动,上面的大桨盘就朝哪里倾斜就好了。油门杆VS总距油门杆固定翼飞机:油门,就是单纯的油门,直接控制发动机的功率,决定动力的大小。直升机:油门实际上有两个,一个显形的,一个隐形的。显形的那个,就是和固定翼飞机一样的油门杆,一般是在驾驶室顶棚的上方,只是起动的时候用,操纵的时候就不用了。隐形的那个,就是总距油门杆了。它的操纵方式是上提和下放。上提总距杆时,通过液压动作筒,带动自动倾斜器的不动环整体上升,动环跟随上升,带动变距拉杆运动,使所有桨叶的迎角同时增大,每片桨叶的升力都增加,导致整个旋翼的拉力增加。上提总距杆的同时,还有一根钢索,连接到燃油调节器,增大活门开度,提升发动机功率,用来在总桨距提升导致旋翼旋转阻力增大的同时,增加动力维持恒定的旋翼转速。下放总距杆的动作与前面相反。因为它带动的是所有桨叶的桨距,所以叫做总桨距,简称总距。有一个概念需要明确一下,直升机旋翼的旋转速度在正常工作状态下是相对恒定的,增减功率靠
飞机飞行的原理图解 飞机是指具有一具或多具发动机的动力装置产生前进的推力或拉力,由机身的固定机翼产生升力,在大气层内飞行的重于空气的航空器。 飞机飞行原理: 1、飞机上升是根据伯努利原理,即流体(包括炝骱退流)的流速越大,其压强越小;流速越小,其压强越大。 2、飞机的机翼做成的形状就可以使通过它机翼下方的流速低于上方的流速,从而产生了机翼上、下方的压强差(即下方的压强大于上方的压强),因此就有了一个升力,这个压强差(或者说是升力的大小)与飞机的前进速度有关。 3、当飞机前进的速度越大,这个压强差,即升力也就越大。所以飞机起飞时必须高速前行,这样就可以让飞机升上天空。当飞机需要下降时,它只要减小前行的速度,其升力自然会变小,小于飞机的重量,它就会下降着陆了。
飞机的组成: 大多数飞机都是由机翼、机身、尾翼、起落装置和动力装置五个主要部分组成。 机翼:主要功用是为飞机提供升力,以支持飞机在空中飞行,也起一定的稳定和操纵作用。在机翼上一般安装有副翼和襟翼。操纵副翼可使飞机滚,放下襟翼能使机翼升力系数增大。另外,机翼上还可安装发动机、起落架和油箱等。 1.机身:主要功用是装载乘员、旅客、武器、货物和各种设备,还可将飞机的其它部件如尾翼、机翼及发动机等连接成一个整体。
2.尾翼:包括水平尾翼(平尾)和垂直尾翼(垂尾)。水平尾翼由固定的水平安定面和可动的升降沧槌伞4怪蔽惨碓虬括固定的垂直安定面和可动的方向舵。尾翼的主要功用是用来操纵飞机俯仰和偏转,以及保证飞机能平稳地飞行。 3.起落装置:飞机的起落架大都由减震支柱和机轮组成,作用是起飞、着陆滑跑,地面滑行和停放时支撑飞机。 4.动力装置:主要用来产生拉力和推力,使飞机前进。其次还可为飞机上的其他用电设备提供电源等。除了发动机本身,动力装置还包括一系列保证发动机正常工作的系统。
直升机与普通飞机区别及飞行简单原理: 不可否认,直升机和飞机有些共同点。比如,都是飞行在大气层中,都重于空气,都是利用空气动力的飞行器,但直升机有诸多独有特性。 (1)直升机飞行原理和结构与飞机不同飞机靠它的固定机翼产生升力,而直升机是靠它头上的桨叶(螺旋桨)旋转产生升力。 (2)直升机的结构和飞机不同,主要由旋翼、机身、发动机、起落装置和操纵机构等部分组成。根据螺旋桨个数,分为单旋翼式、双旋翼式和多旋翼式。(3)单旋翼式直升机尾部还装有尾翼,其主要作用:抗扭,用以平衡单旋翼产生的反作用力矩和控制直升机的转弯。 (4)直升机最显眼的地方是头上窄长的大刀式的旋翼,一般由2~5片桨叶组成一副,由1~2台发动机带动,其主要作用:通过高速的旋转对大气施加向下的巨大的力,然后利用大气的反作用力(相当与直升飞机受到大气向上的力)使飞机能够平稳的悬在空中。 三、平衡分析(对单旋翼式): (1)直升飞机的大螺旋桨旋转产生升力平衡重力。 直升飞机的桨叶大概有2—3米长,一般有5叶组成。普通飞机是靠翅膀产生升力起飞的,而直升飞机是靠螺旋桨转动,拨动空气产生升力的。直升飞机起飞时,螺旋桨越转越快,产生的升力也越来越大,当升力比飞机的重量还大时,飞机就起飞了。在飞行中飞行员调节高度时,就只要通过改变大螺旋桨旋转的速度就可以了。 (2)直升飞机的横向稳定。 因为直升飞机如果只有大螺旋桨旋,那么根据动量守衡,机身就也会旋转,因此直升飞机就必须要一个能够阻止机身旋转的装置。而飞机尾部侧面的小型螺旋桨就是起到这个作用,飞机的左转、右转或保持稳定航向都是靠它来完成的。同时为了不使尾桨碰到旋翼,就必须把直升飞机的机身加长,所以,直升飞机有一个像蜻蜓式的长尾巴。 四、能量方式分析。 根据能量守恒定律可知:能量既不会消失,也不会无中生有,它只能从一种形式转化成为另一种形式。在低速流动的空气中,参与转换的能量只有压力能和动能。一定质量的空气具有一定的压力,能推动物体做功;压力越大,压力能也越大;流动的空气具有动能,流速越大,动能也越大。 而空气的流速只有来自于发动机所带的螺旋桨对空气的作用,当然从这里分析能量也是守衡的。 直升机螺旋桨升力计算公式 一般直升机的旋翼系统是由主旋翼.尾旋翼和稳定陀螺仪组成,如国产直-8,直-9。 也有共轴反旋直升机,主旋翼是上下两层反转螺旋桨,无尾翼,如俄罗斯的卡-28。
固定翼飛機 飛行原理簡介 1
2 甲、固定翼飛機之基本空氣動力學 一、空氣動力之型式 下洗氣流改變相對風方向 並且 e a U L ⊥ 而e a U D --- a L 及a D 皆以ac 為施力 點,但a M 與ac 無關。 a D 不等於飛行的阻力(§三) 二、空氣動力之數學 --- air ρ:空氣密度 --- S :翼面積 a L 、a D 及a M 之量化關係: l a i r l e a i r a SC U SC U L 221221ρρ≈= d air a SC U D 221ρ≈、m air a SC U M 221ρ≈ --- l C 、d C 、m C :與α成右圖之函數關係的常數 討論:(1) m C 幾乎與α無關 (2) l C 與α的函數存在有線性區 a L 函數之線性關係:αw l a C = --- w a :線性區之函數斜率 --- w a 的值為機翼之3D 形狀的函數 遠對相端
3 翼弦彎曲(camber)的效應之一 (1) 翼弦彎曲會使升力曲線左右移動,其效果等於改變有效攻角 (2) 線性區之升力係數變為 )(ζα-=w l a C --- ζ:camber 之函數 翼尾控制面之作用原理 --- 翼尾控制面之擺動等於改變翼面之彎曲 --- 這樣的彎曲使得 τδζ≈,10≤≤τ --- 因此,升力係數變為)(τδα-=w l a C 翼面3D 形狀的影響 (1) 翼面的展弦比(AR)將影響 w a 及ε --- AR 的定義為翼展的平方除以翼面積 ==> 翼展越大的翼面其AR 也越大 --- AR 愈大w a 也增大,但ε則變小 (2) 翼面的形狀將決定ac 的位置(右圖) --- 一般翼面的ac 在右圖兩例之間 U e U e U e U e U e
For personal use only in study and research; not for commercial use 纸飞机飞行原理 纸飞机要飞得远、飞得快,有几点要注意:? 1)要尽量折得两边对称,如果不对称得话,飞机容易转弯,就飞不远了;? 2)翅膀和机身的比例要恰当。机身小翅膀大,飞机升力是够了,但重心上抬,投出去的飞机容易发飘;机身大翅膀小,重心过于下移,飞机就像飞镖一样,惯性十足,但却失去了飞行滑翔的行程,仿佛是扔出去的纸团。正确合理的翅膀和机身比例要根据纸飞机的形状和纸张的质地决定,多试几次就能找到最佳比例;? 3)注意前后的平衡。机头太重,飞机容易一头扎在地上;机头太轻,又容易造成机头上翘,导致失速。通过调整纸飞机的外形,或用纸条或胶带进行适当的加载(如果允许的话)可以调节飞机的平衡;? 4)最后说一点,纸飞机的投掷也很有讲究:不要侧风投飞,不然容易被刮偏;顺风投掷也没有足够的动力;最好是迎着不太强的正面逆风投掷,投出的角度稍大于水平角度,约15度左右,飞机要平稳向前送出,到最后一刻才自然脱手,那样飞得最远。 纸飞机的原理 2、机头不能太重,否则一下就载下去了;? 3、机头不宜太尖。阻力小,速度快,在空中停留的时间自然就短;? 4、机翼适当大一些,这与空气中的浮力成正比;? 5、后翼两侧向上折一下,但注意适度;如果迎面有微风吹来,有时还能向上飞;? 6、折时两边尽量对称,如果是开阔地,可以适当将左或右侧重一点点,使飞机在空中盘旋,可以一定程度上增加飞机在空中的滞留时间。? 7、折完后将两侧机翼向上,形成一定度数的v字夹角,注意不要太向上,稍有一点就行了。之后检查机翼两侧是否对称;? 8、先试飞,观察飞行情况做调整。(比如:飞起来机头向前一点一点的,说明机头轻了)?
超轻型飞行器 超轻型飞行器是指由单人驾驶、仅用于娱乐或体育活动、不需要任何适航证的空 中飞行器具,并且符合下列条件之一: (a)如无动力驱动,空机重量小于71千克(155磅); (b)如有动力驱动,应当满足下列限制: (1)空机重量小于116千克(254磅),不包括在遇险时使用的飘浮和安全器械; (2)燃油容量不超过20升(5美制加仑); (3)全马力平飞中,校正空速小于100千米/小时(55海里/小时); (4)发动机停车后的失速速度不超过校正空速45千米/小时 (24海里/小时). (a)超轻型飞行器及其部件和设备不要求按航空器适航审定标准进行审定,也不要 求具有适航证. (b)局方对驾驶超轻型飞行器的人员没有航空知识、年龄及经历的具体要求,也不 要求其具有航空人员执照及体检合格证. (c)超轻型飞行器不要求国籍登记或喷涂任何标志. 轻型运动类飞机 轻型运动类航空器是指符合下述定义的轻型运动飞机(固定翼)、滑翔机、自转 旋翼机、轻型运动直升机或者轻于空气的航空器 1.最大起飞重量不超过下列条件之一: (1)700公斤(1540磅)的不用于水上运行的航空器 (2)750公斤(1650磅)的用于水上运行的航空器 2.轻型运动直升机,在海平面标准大气条件下,最大连续功率状态下最大平飞空 速(VH)不超过90节校正空速。除轻型运动直升机外的其他航空器,在海平面标 准大气条件下,最大连续功率状态下最大平飞空速(V)不超过120节校正空速。 3.对于无动力滑翔机,不可超越速度(VwE)不超过120节校正空速。 4.在最大审定起飞重量和最临界的重心位置,并不使用增升装置的条件下,航空 器最大失速速度或者最小定常飞行速度 (1)不超过49节校正空速。 5.包括飞行员在内的最大座位数不超过2座。 6.如果具有座舱,座舱为非增压座舱。
固定翼的飞行教程及原理入门必看 本帖最后由贾恬夏于2009-8-9 10:50 编辑 飞行前要注意哪些 飞行前要注意 1、尽可能清理飞行场地。 2、充分注意周边环境: - 请勿在强风、雨天或夜晚飞行 - 请勿在通风不畅或建筑物内飞行 - 请勿在人多的地方飞行 - 请勿在学校、住宅或医院近旁飞行 -请勿在公路铁道或电线近旁飞行 -请勿在有可能因其他航模飞机引起的无线电波频率干扰的地方飞行 3 儿童遥控飞机一定要有成人在旁看护. 4、模型飞机不能用于超出使用范围的其它用途。 5、随时放置好螺丝刀,扳手及其它工具。在启动前,检视用于组装或维修飞机机的工具是否已经准备好。 6、检查飞机的每个部分。启动前,检查确保飞机无零件损坏并且工作正常。检视以确保所有活动零件位置正确, 所有螺丝及螺母已适当拧紧,并且没有损坏和装配不当的地方。检查确保电池已充满电。根据操作手册的说明 更换损坏和不能再用的零件。如果操作手册没有说明,请与经销商或与我们客户服务部联系。 7、备件请用正品。不要使用非原厂配置的零配件,否则可能有引发事故或伤害的危险。8、启动电机前检查各舵机是否工作正常。 启动前的检查 1、初学者有必要从有经验者那儿了解安全事项和操作说明。 2、检查确定没有松动或掉落的螺丝和螺母。 3、检查确定电动机座上螺丝没有松动。 4、检查确定桨叶没有损坏或磨损。 5。检查确定发射机、接收机、电池已充满电。 6、检查遥控器的有效控制距离。 7、检查确定所有的舵机动作滑顺。舵机动作有误和故障会导致失控, 8、在飞行中如有异常抖动,请立即降落查找原因。 19、不计后果地飞行会导致事故和伤害,请遵循所有规则,安全负责的享受飞行乐趣。 ------------------------------------------------------------------------------------------------------------------------------------------------------- 航模飞机飞行原理 飞机从地面滑跑到离地升空,是由于升力不断增大,直到大于飞机重力的结果。而只有当飞机速度增大到一定时,才可能产生足以支持飞机重力的升力。可见飞机的起飞是一个速度不断增加的加速过程。故起飞一般只分三个阶段,即起滑跑、离地和上升。起飞滑跑的目的是为了增大飞机的速度,直到获得离地速度。拉力或推力愈大,剩余拉力或剩余推力也愈大,飞机增速就愈快。起飞中,为尽快地增速,应把油门推到最大位置。并同时保持滑跑方向。对螺旋桨飞机而言,起飞滑跑中引起飞机偏转的主要原因是螺旋桨的副作用。起
第六章 直升机的操纵原理
直升机不同于固定翼飞机,一般都没有在飞行中 供操纵的专用活动舵面。这是由于在小速度飞行 或悬停中,其作用也很小,因为只有当气流速度 很大时舵面或副翼才会产生足够的空气动力。单 旋翼带尾桨的直升机主要靠旋翼和尾桨进行操纵, 而双旋翼直升机靠两副旋翼来操纵。由此可见, 旋翼还起着飞机的舱面和副翼的作用。
直升机操纵原理
旋翼不仅提供升力同时也是直升机的主要操 纵面。
总距操纵杆:通过自动倾斜器改变旋翼桨叶 总距,控制直升机的升降运动。提杆,增大 总距,升力增大,直升机上升;压杆,减小 总距,直升机下降。
周期变距操纵杆:操纵周期变距操纵杆,使 自动倾斜器相应的倾斜,从而使桨叶的桨距 作每周一次的周期改变,造成旋翼拉力矢量 按相应的方向倾斜,达到控制直升机的前、 后(左、右)和俯仰(或横滚)运动。
直升机操纵原理
脚蹬:控制尾桨,实现航向操纵。 尾桨:平衡旋翼反扭矩、航向操纵。 垂尾:增加航向稳定性。 平尾:增加俯仰稳定性。
直升机操纵原理(续)
6.1 直升机操纵特点
直升机驾驶员座舱 操纵机构及配置直 升机驾驶员座舱主 要的操纵机构是: 驾驶杆(又称周期 变距杆)、脚蹬、 油门总距杆。此外 还有油门调节环、 直升机配平调整片 开关及其他手柄.
驾驶杆和脚蹬
驾驶杆位于驾驶员座椅前面,通过操纵线系与旋翼 的自动倾斜器连接。驾驶杆偏离中立位置表示:
向前——直升机低头并向前运动; 向后——直升机抬头并向后退; 向左——直升机向左倾斜并向左侧运动; 向右——直升机向右倾斜并向右侧运动。 脚蹬位于座椅前下部,对于单旋翼带尾桨的直升机
来说,驾驶员蹬脚蹬操纵尾桨变距改变尾桨推(拉) 力,对直升机实施航向操纵。
DIY模型飞机的完全攻略 2008-06-10 08:35:03 来源: 作者: 【大中小】评论:1条 尽管学飞以来一直在飞成品机(ARF),但是,我自己要设计制作一架模型飞机的愿望 一直在心里涌动。机会终于来了,前些天伟哥决定改直归固,于是我决定做一架练习机送给他。几经周折后,我成功地将自己亲手设计制造的一架航模送上了蓝天。我的愿望得到了厚重的实现,那种喜悦满足的心情是难以用语言来表达的。 下面我就讲讲我的设计制作过程,希望能对想动手做航模的朋友有所帮助。不对之处,还望大家共同交流提高。 按照现成的图纸制作一架模型飞机,不是一件太难的事。但是,如果根据您的需要自己设计制作一架飞机,恐怕就具有一定的挑战性了。当您要下手设计制作时,会遇到很多需要解决的问题。如:为什么要选用这个翼型、翼展和翼弦是怎么确定的、机身长度应该是多少、尾翼的面积需要多大、各部件的位置应该放在哪里等等。好在现在的由有关书籍较多,只要认真学习归纳,就能找到答案。根据我所学的知识,我是这样设计制造我的“菜鸟1号”的。 第一步,整体设计。 1。确定翼型。我们要根据模型飞机的不同用途去选择不同的翼型。翼型很多,好几千种。但归纳起来,飞机的翼型大致分为三种。一是平凸翼型,这种翼型的特点是升力大,尤其是低速飞行时。不过,阻力中庸,且不太适合倒飞。这种翼型主要应用在练习机和像真机上。二是双凸翼型。其中双凸对称翼型的特点是在有一定迎角下产生升力,零度迎角时不产生升力。飞机在正飞和到飞时的机头俯仰变化不大。这种翼型主要应用在特技机上。三是凹凸翼型。这种翼型升力较大,尤其是在慢速时升力表现较其它翼型优异,但阻力也较大。这种翼型主要应用在滑翔机上和特种飞机上。另外,机翼的厚度也是有讲究的。同一个翼型,厚度大的低速升力大,不过阻力也较大。厚度小的低速升力小,不过阻力也较小。因为我做的是练习机,那就选用经典的平凸翼型克拉克Y了。因伟哥有一定飞行基础,速度可以快一些, 所以我选的厚度是12%的翼型。 实际上就选用翼型而言,它是一个比较复杂、技术含量较高的问题。其基本确定思路是:根据飞行高度、翼弦、飞行速度等参数来确定该飞机所需的雷诺数,再根据相应的雷诺数和您的机型找出合适的翼型。还有,很多真飞机的翼型并不能直接用于模型飞机,等等。这个问题在这就不详述了。 机翼常见的形状又分为:矩形翼、后掠翼、三角翼和纺锤翼(椭圆翼)。
第一章空气动力学基本知识 空气动力学是一门专门研究物体与空气作相对运动时作用在物体上的力的一门科学。随着航空科学事业的发展,飞机的飞行速度、高度不断提高,空气动力学研究的问题越来越广泛了。航模爱好者在制作和放飞模型飞机的同时,必须学习一些空气动力学基本知识,弄清楚作用在模型飞机上的空气动力的来龙去脉。这将有助于设计、制作、放飞和调整模型飞机,并提高模型飞机的性能。 第一节什么是空气动力 当任何物体在空气中运动,或者物体不动,空气在物体外面流过时(例如风吹过建筑物),空气对物体都会有作用力。由于空气对物体作相对运动,在物体上产生的这种作用力,就称为空气动力。 空气动力作用在物体上时,不是只作用在物体上的一个点或一个部分,而是作用在物体的整个表面上。空气动力表现出来的形式有两种,一种是作用在物体表面上的空气压力,压力是垂直于物体表面上的。另一种虽然也作用在物体表面上,可是却与物体表面相切,称为空气与物体的摩擦力。物体在空气中运动时所受到的空气作用力就是这两种力的总和。 作用在物体上的空气压力也可以分两种,一种是比物体前面的空气压力大的压力,其作用方向是从外面指向物体表面(图1-1),这种压力称为正压力。另一种作用在物体表面的压力,比物体迎面而来的空气压力小,压力方向是从物体表面指向外面的,这种压力称为负压力,或吸力(图1-1)。空气对物体的摩擦力与物体对空气之间相对运动的方向相反。这些力量作用在物体上总是使物体向气流流动的方向走。如果是空气不动,物体在空气中运动,那么空气 摩擦力便是与物体运动的方向相反,阻止物体向 前运动。 很明显,空气动力中由于粘性产生的空气摩 擦力对模型飞机飞行是有害的。可是空气作用在 模型上的压力又怎样呢?总的看来,空气压力对模 型的飞行应该说是有利的。事实上模型飞机或真 飞机之所以能够克服本身的重量飞起来,就是因图1-1作用在机翼上的压强分布 为机翼上表面产生很强的负压力,下表面产生正压力,由于机翼上、下表面压力差,就使模型或真飞机飞起来。可是作用在物体上的压力也并不是完全有利的。一般物体前面的压力大,后面的压力小,由于物体前后压力差便会阻碍物体前进,产生很多困难。只有物体的形状适当才可以获得最大的上、下压力差和最小的前后压力差,也就是通常所说的最大的升力和最小的阻力。所以空气压力对于物体的运动有
固定翼飞机控制基本方法 飞机控制的几个关键要素无非是方向舵、升降舵、副翼、油门这四个通道,其他都是锦上添花,把这四个通道的控制掌握了,基本的飞行就没有问题,至少,在模拟器上是这样,等飞完真机再验证下。我用的模拟器是G4,需要提醒一下,G4目前虽然可以安装在Win7和Vista上,但在这两个系统上无法实现调校,需要以Win2000的兼容方式运行才行。 方向舵 在地面滑行时,方向舵用来控制飞机转向,但在空中飞行时,方向舵是用来使机身与飞行方向保持一致,不要妄想用方向陀实现飞机空中转向,这是我在模拟器上摔机无数的根本错误操作之一。 升降舵 当机翼保持水平时,拉升降舵实现飞机抬头,注意目的是使飞机抬头而不是爬升,爬升主要依靠油门的控制,升降舵只是起辅助作用,这是我在模拟器上摔机无数的根本错误操作之二。 副翼 副翼用来控制机翼向左或向右倾斜或保持水平,副翼与升降舵配合实现飞机的空中转弯。 空中转弯 1利用副翼将机翼向要转的方向倾斜,达到需要的斜度后迅速将发射器副翼拉杆回中2立即拉升降舵,幅度为保持飞机在转弯过程中不掉头 3完成转弯后回中升降舵,反向打副翼以实机翼恢复水平。 操作的关键: 转弯半径取决于副翼操作幅度的大小,而不是压副翼时间的长短,正确的操作方法是短暂压一下副翼使机翼达到期望的倾斜度,然后让副翼操作杆回中,否则机翼倾斜度会越来越大,即便拉升降舵,飞机也会急剧的螺旋俯冲,这是我在模拟器上摔机无数的根本错误操作之三。 拉升降舵的幅度取决于机翼的倾斜度,倾斜度越大,拉升降舵的幅度越大,升降舵拉升幅度在转弯过程中尽量保持不变,保持飞机的稳定,这就要求操作杆移动幅度要正确,这个只有在模拟器上多多练习体会。 飞行高度 一般来讲,油门在1/4~1/2之间的某个位置时,飞机会达到平衡状态并保持稳定飞行,如果需要爬升到新的高度时,慢慢拉油门,飞行速度增加从而导致机翼产生的升力增加,当达到要求的高度时,再将油门拉回原来的位置。
(一)地面检测: 1.电源检查及充电:商品设备中,竞赛型设备的电源都使用镍镉电池,普及型设备电源多为干电池。对镍镉电池须进行合理的充电。设备中配有充电器的,可以直接用来对电池充电。没有配充电器的,可用其他充电器代替充电。充电电流控制在电池容量的十分之一。譬如500mAh的电池,充电电流应50mA。第一次充电时间是16--18小时,以后每次只充14小时。 按道理,新电池进行两次充、放电之后才能正式投入使用,这样可以保证电池容量和寿命达到规定标准。同时在充、放电的过程中也可以检查电池质量,我们应当禁令这样去做。但在实际使用当中,常常发射机电池不易取出,所以有时也在使用中放电一面进行地面测试、拉距离,一面把电耗完。但一定要使用电压降至平均单节电压1.1V时再进行第二次充电。这时积累放电时间应超过一百二十分钟。 不是使用镍镉电池的设备,先把发射机、接收机的电源电压核对清楚,千万不能搞错。目前商品设备的发射机电源不超过12V,接收机电源电压不超过6V,而且工作电压允许有一个变化的范围。通常情况下,发射机为9.6--12V,接收机为4.8--6V。当使用干电池时,应把电压配在上限使用。值得注意的是:干电池的质量因生产厂家、保存时间长短而差异很大,对实际容电量难以掌握,因此建议尽量采用镍镉电池。 2.开机检查:首先将发射机天线全部拉出,打开电源开关。这时,电平指示表应指示在绿色或白色区域的上方。把天线缩短时,电平指示将下降,然再在将接好伺服舵机的接收机电源接收通,舵机应回到中立位置;拨动操纵杆和微调手柄,相应舵机应有动作,各通道也不互相干扰,说明发射机和接收机工作基本正常。如果伺服舵既声音均匀、转动平稳、没有卡点,加上适当负载转动速度也没有明显变化,则可以初步断定舵机工作是正常的。 3.拉距离实验:每次拉距离时,接收机天线和发射机天线的位置必须相对固定。原则是要使接收机在输入信号较弱的情况下也能正常工作,才能认可是可靠的。具体方法是接收机天线水平放置,指向发射机位置,而发射机天线则指向接收机位置。这时接收机天线所指向的方向,由于电磁波辐射的方向性,是场强最弱的区域。 新设备拉距离实验时,应先用短天线(一节),记下它的最大可控制距离,作为以后例行检查时的依据。然后再将天线全部拉出,逐渐加大遥控距离,直至出现跳舵。当天线只拉出一节时,应在30米--50米左右工作正常。天线全部拉出时应在500米左右工作正常。 所谓工作正常的标准,是舵机不出现抖动。如果舵机不断出现抖动,应立即关闭接收机,这时的距离刚好超过地面控制的有效距离。 老式设备不允许在短天线时开机,不然会把高频放大管烧坏。现在的新式设备增加了安全装置,不必再有烧管之忧。但镍镉电池刚刚充完电时请不要立刻开机,因为这时发射机电源电压可能会超过额定值。 (二)、安装 通过以上检查,工作全部正常的设备,就可以进行安装了。在安装之前,照例应熟知说明书或有关资料提供的安装要求。如果实在无法得知具体的安装方法,则应最大可能地本着安全、可*的原则进行试装。在装有内燃机的模型上使用时,还必须尽可能地采取防震措施,否则,将在整机试验和日后的飞行中后患无穷。 1.电池的安装 电池在模型受到冲击时惯性最大,对其它部件的威胁也严重。因此要把它放在所有部件的最前端。在小型模型上,有时为了调整重心位置而不得不将电池后移时,也一定要妥为固定,慎之又慎。否则,等于在后面放了一颗小小的定时炸弹。在较大型的模型上,因为它对重心位置影响不是很大,建议不要用电池后移的方法去调整重心。不能因为电池外壳的坚固而忽视了对它的减震。它和其它部件一样,也应当用泡沫塑料包裹,尽量减小振动,以免电池内部或引线部分受到剧烈振动而损坏。 2.接收机的安装 先用泡沫塑料包好,放在舵机前面不受压、不受挤的地方。然后用固定在机身上的橡筋条或尼龙搭扣把它不松不紧地固定好。天线在接收机的引出点不能受力,以免被折断。可以在引出处十厘米的地方绑上一段1x 2的橡筋条,橡筋条的另一端固定在机身上。天线的共余部分放在机身内或机身外都可以,但不能打圈,耍尽量拉直(图三)。不能将天线剪短,更不要用普通导线替换原来的天线。商品接收机上的天线是采用特殊导线的,它不但柔软结实,而且股数特别多,一般是很难找到这种导线的。 3.电源开关的安装 接收机电源开关要按照说明书规定的方法安装,直接安装在机身上的,一定耍把扳键的孔开得足够大。如果孔开得太小,开机后扳键没有到达锁紧位置,就有可能自动退回关机位置,造成彻底失控。如果安装在机身内,用钢丝推拉开关的,一定要能拉或推到锁紧位置。例如F3B的电源开关很多是将钢丝推进去为开机,一旦钢丝短了,就无法到达锁紧位置,有可能出现飞行中关断电源的不幸事故。对于使用内燃帆的模型来说,这一点尤为重要,万万疏忽不得,对于振动较大的模型,还应当考虑对开关的减震措施,否则开关内部的弹性铜片会因长期振动而失去弹性,造成接触不良,酿成飞行事故。 4.伺服舵机的安装 舵机在使用中的可*性和使用寿命,直接与振动情况有关。因此制造厂家在设计舵机时已经充分地考虑到防震措施。有的使用了特殊的避震结构,在安装上也规定了合理的方法,使舵机在正常振动的情况下能够可*地工作。不同厂家的舵机,安装方法也各有所异,而且只提供特定的减震垫和紧固件。所以必须按照厂家规定的方法去安装。 有时竞赛型设备带有二次减震的安装架,可以得到较好的减震,有些设备则没有。但不少运动员自己动手用层板自制安装架,增加了二次振震,这对于振动较大的模型还是有好处的。在使用内燃机的模型上,舵机安装完毕以后,只能通过橡皮垫圈与安装架固定,不能直接与机体或安装架相碰,这一点耍特别注意。紧固舵机的自攻螺丝,拧得松紧程度要适当,既不能发生松动,也不能把橡皮垫圈压扁。有不少模型的跳舵现象就是拧得过紧,使橡皮垫圈失去弹性而引起的。 5.伺服舵机与舵面的联接 联接可以用软钢索,也可以用硬连杆联结。用软钢索联结时,没有连杆振动的影响,对延长舵机的寿命和保持舵面中立位置的稳定有好处。缺点