
2、1 solution: According to the equation of pure transition transformation,the new point after transition is as follows: 2、3 solution: According to the constraint equations: Thus,the matrix should be like this: 2、4 Solution:
= 2、7 Solution: According to the equation of pure rotation transformation , the new coordinates are as follows: 2、9 Solution: Acording to the equations for the bined transformations ,the new coordinates are as follows: 010051 05110 0030010310(,90)(5,3,6)(,90)001060 1004900 0110 00111A B P Rot z Trans Rot x P -????????????????????-? ????????? =???==?????????? ? ????????? ??????????o o
A B Transformations relative to the reference frame Transformations relative to the current frame 2、10 P=Trans(5,3,6)Rot(x,90)Rot(a,90) P 1 0 0 5 1 0 0 0 0 -1 0 0 2 = 0 1 0 3 0 0 -1 0 1 0 0 0 3
《我看机器人》 学院:理学院 学号:5502211005 姓名:黄志涵 班级:应用物理学111班
摘要:在21世纪,随着科学技术的发展,机器人的研究和发展也将会更进一步。机器人原本起源在美国,但其在美国的发展速度远远不如日本。这里面主要的原因,可能是因为日本劳动力短缺,大部分需要劳动力的工厂得不到劳动力,所以日本政府大力发展机器人产业,用机器人代替短缺的劳动力资源。本文通过三部分简要阐述有关机器人一些发展和应用,以及未来机器人更大的应用前景。 关键词:机器人,机器人发展史,关键技术,分类,应用 正文: 第一部分:机器人的发展史 从1920年捷克斯洛伐克作家卡雷尔·恰佩克在他的科幻小说《罗萨姆的机器人万能公司》中,根据Robota(捷克文,原意为“劳役、苦工”)和Robotnik(波兰文,原意为“工人”),创造出“机器人”这个词。机器人历史有了如下的发展:1939年美国纽约世博会上展出了西屋电气公司制造的家用机器人Elektro。它由电缆控制,可以行走,会说77个字,甚至可以抽烟,不过离真正干家务活还差得远。但它让人们对家用机器人的憧憬变得更加具体。 1942年美国科幻巨匠阿西莫夫提出“机器人三定律”。虽然这只是科幻小说里的创造,但后来成为学术界默认的研发原则。 1948年诺伯特·维纳出版《控制论》,阐述了机器中的通信和控制机能与人的神经、感觉机能的共同规律,率先提出以计算机为核心的自动化工厂。 1954年美国人乔治·德沃尔制造出世界上第一台可编程的机器人,并注册了专利。这种机械手能按照不同的程序从事不同的工作,因此具有通用性和灵活性。 1956年在达特茅斯会议上,马文·明斯基提出了他对智能机器的看法:智能机器“能够创建周围环境的抽象模型,如果遇到问题,能够从抽象模型中寻找解决方法”。这个定义影响到以后30年智能机器人的研究方向。 1959年德沃尔与美国发明家约瑟夫·英格伯格联手制造出第一台工业机器人。随后,成立了世界上第一家机器人制造工厂——Unimation公司。由于英格伯格对工业机器人的研发和宣传,他也被称为“工业机器人之父”。 1962年美国AMF公司生产出“VERSTRAN”(意思是万能搬运),与Unimation 公司生产的Unimate一样成为真正商业化的工业机器人,并出口到世界各国,掀起了全世界对机器人和机器人研究的热潮。 1962年-1963年传感器的应用提高了机器人的可操作性。人们试着在机器人上安装各种各样的传感器,包括1961年恩斯特采用的触觉传感器,托莫维奇和博尼1962年在世界上最早的“灵巧手”上用到了压力传感器,而麦卡锡1963年则开始在机器人中加入视觉传感系统,并在1965年,帮助MIT推出了世界上第一个带有视觉传感器,能识别并定位积木的机器人系统. 1965年约翰·霍普金斯大学应用物理实验室研制出Beast机器人。Beast已经能通过声纳系统、光电管等装置,根据环境校正自己的位置。20世纪60年代中期开始,美国麻省理工学院、斯坦福大学、英国爱丁堡大学等陆续成立了机器人实验室。美国兴起研究第二代带传感器、“有感觉”的机器人,并向人工智能进发。 1968年美国斯坦福研究所公布他们研发成功的机器人Shakey。它带有视觉传感器,能根据人的指令发现并抓取积木,不过控制它的计算机有一个房间那么大。Shakey可以算是世界第一台智能机器人,拉开了第三代机器人研发的序幕。 1969年日本早稻田大学加藤一郎实验室研发出第一台以双脚走路的机器人。加藤一郎长期致力于研究仿人机器人,被誉为“仿人机器人之父”。日本专家
1. 自由度:指描述物体运动所需要的独立坐标数。 2. 机器人工作载荷:机器人在规定的性能范围内,机械接口处能承受的最大负载量(包括手部)。 3. 柔性手:可对不同外形物体实施抓取,并使物体表面受力比较均匀的机器人手部结构。 4. 制动器失效抱闸:指要放松制动器就必须接通电源,否则,各关节不能产生相对运动。 5. 机器人运动学:从几何学的观点来处理手指位置与关节变量的关系称为运动学。 6. 机器人动力学:机器人各关节变量对时间的一阶导数、二阶导数与各执行器驱动力或力矩之间的 关系,即机器人机械系统的运动方程。 7. 虚功原理:约束力不作功的力学系统实现平衡的必要且充分条件是对结构上允许的任意位移(虚位 移)施力所作功之和为零。 8. PWM 驱动:脉冲宽度调制驱动。 9. 电机无自转:控制电压降到零时,伺服电动机能立即自行停转。 10. 直流伺服电机的调节特性:是指转矩恒定时,电动机的转速随控制电压变化的关系。 11. 直流伺服电机的调速精度:指调速装置或系统的给定角速度与带额定负载时的实际角速度之 差,与给定转速之比。 12. PID 控制:指按照偏差的比例、积分、微分进行控制。 13. 压电元件:指某种物质上施加压力就会产生电信号,即产生压电现象的元件。 14. 图像锐化:突出图像中的高频成分,使轮廓增强。 15. 隶属函数:表示论域U 中的元素u 属于模糊子集A 的程度,在[0, 1]闭区间内可连续取值。 16. 脱机编程:指用机器人程序语言预先进行程序设计,而不是用示教的方法编程。 17. AUV :无缆自治水下机器人,或自动海底车。 二、简答题: 1.机器人学主要包含哪些研究内容? 2.机器人常用的机身和臂部的配置型式有哪些? 4.机器人控制系统的基本单元有哪些? 5.直流电机的额定值有哪些? 6.常见的机器人外部传感器有哪些? 7.简述脉冲回波式超声波传感器的工作原理。 8.机器人视觉的硬件系统由哪些部分组成? 9.为什么要做图像的预处理?机器视觉常用的预处理步骤有哪些? 10.请简述模糊控制器的组成及各组成部分的用途。 11.从描述操作命令的角度看,机器人编程语言可分为哪几类? 12.仿人机器人的关键技术有哪些? 1.答:机器人研究的基础内容有以下几方面:(1) 空间机构学;(2) 机器人运动学;(3) 机器人静力学;(4)机器人动力学;(5)机器人控制技术;(6)机器人传感器;(7)机器人语言。 2.答:目前常用的有如下几种形式:(1)横梁式。(2)立柱式。(3)机座式。(4)屈伸式。 4.答:构成机器人控制系统的基本要素包括: (1) 电动机,(2) 减速器,(3) 驱动电路,(4) 运动特性检测传感器,(5) 控制系统的硬件,(6) 控制系统的软件, 5.答:直流电动机的额定值有以下几项:(1)额定功率,(2)额定电压,(3)额定电流,(4)额定转速, 6.答常见的外部传感器包括 触觉传感器,分为;接触觉传感器、压觉传感器、滑觉传感器和力觉传感器。距离传感器,包括超声波传感器,接近觉传感器,以及视觉传感器、听觉传感器、嗅觉传感器、味觉传感器等。 7.答:在脉冲回波式中,先将超声波用脉冲调制后发射,根据经被测物体反射回来的回波延迟时间Δt ,计算出被测物体的距离R ,假设空气中的声速为v ,则被测物与传感器间的距离R 为: /2R v t =?? 如果空气温度为T (℃),则声速v 可由下式求得: ()331.50.607m/s v T =+ 8.答:(1) 景物和距离传感器,常用的有摄像机、CCD 图像传感器、超声波传感器和结构光设备等;(2) 视频信号数字化设备,其任务是把摄像机或者CCD 输出的信号转换成方便计算和分析的数字信号;(3)
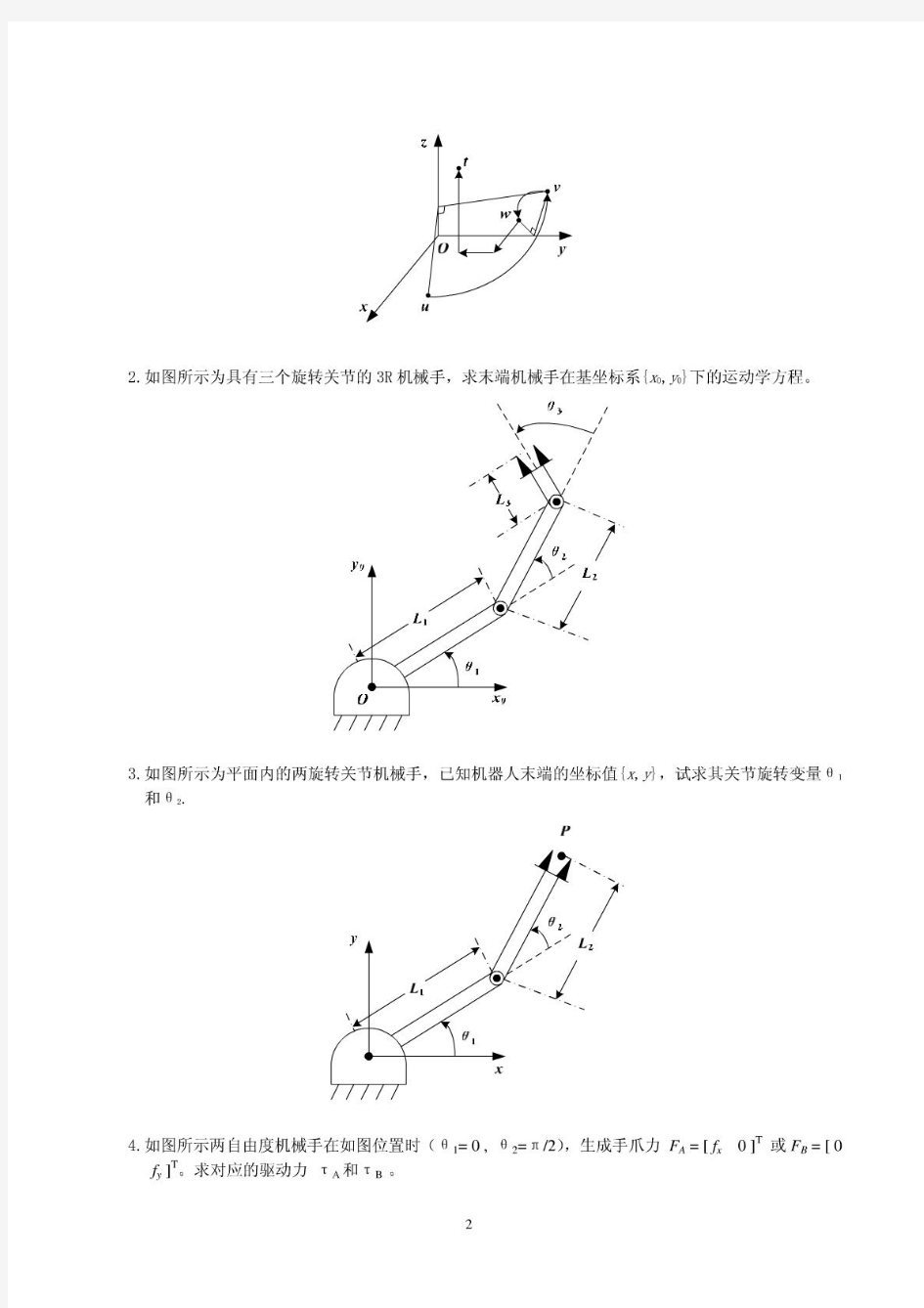
中南大学网络教育课程考试复习题及参考答案 机器人学导论 一、名词解释题: 二、简答题: 1.机器人学主要包含哪些研究内容? 2.机器人常用的机身和臂部的配置型式有哪些? 3.拉格朗日运动方程式的一般表示形式与各变量含义? 4.机器人控制系统的基本单元有哪些? 三、论述题: 1.试论述机器人技术的发展趋势。 2.试论述精度、重复精度与分辨率之间的关系。 4.试论述机器人静力学、动力学、运动学的关系。 四、计算题:(需写出计算步骤,无计算步骤不能得分): 1.已知点u 的坐标为[7,3,2]T ,对点u 依次进行如下的变换:(1)绕z 轴旋转90°得到点v ;(2)绕y 轴旋转90°得到点w ;(3)沿x 轴平移4个单位,再沿y 轴平移-3个单位,最后沿z 轴平移7个单位得到点t 。求u , v , w , t 各点的齐次坐标。 x y z O u v w t 2.如图所示为具有三个旋转关节的3R 机械手,求末端机械手在基坐标系{x 0,y 0}下的运动学方程。 θ1 θ2 θ3 L 2 L 1 L 3 x 0 y 0 O 3.如图所示为平面内的两旋转关节机械手,已知机器人末端的坐标值{x ,y },试求其关节旋转变量θ1 和θ2.
θ1 θ2 L 2 L 1 x y P 4.如图所示两自由度机械手在如图位置时(θ1= 0 , θ2=π/2),生成手爪力 F A = [ f x 0 ]T 或F B = [ 0 f y ]T 。求对应的驱动力 τ A 和τ B 。 τ1 L 2 x y P L 1 τ2F A F B 0y f ?? ???? 0x f ?????? 5.如图所示的两自由度机械手,手部沿固定坐标系在手上X 0轴正向以 1.0m/s 的速度移动,杆长 l 1=l 2=0.5m 。设在某时刻θ1=30°,θ2=-60°,求该时刻的关节速度。已知两自由度机械手速度雅 可比矩阵为 1121221211212 212l s l s l s l c l c l c θθ---?? =? ?+?? J θ1 -θ2 l 2 l 1 x 0 y 0 O x 3 y 3v 3
中南大学网络教育课程考试复习题及参考答案机器人学导论 一、名词解释题: 1.自由度: 2.机器人工作载荷: 3.柔性手: 4.制动器失效抱闸: 5.机器人运动学: 6.机器人动力学: 7.虚功原理: 8.PWM驱动: 9.电机无自转: 10.直流伺服电机的调节特性: 11.直流伺服电机的调速精度: 12.PID 控制: 13.压电元件: 14.图像锐化: 15.隶属函数: 16.BP 网络: 17.脱机编程: 18.AUV: 二、简答题: 1.机器人学主要包含哪些研究内容? 2.机器人常用的机身和臂部的配置型式有哪些? 3.拉格朗日运动方程式的一般表示形式与各变量含义? 4.机器人控制系统的基本单元有哪些? 5.直流电机的额定值有哪些? 6.常见的机器人外部传感器有哪些? 7.简述脉冲回波式超声波传感器的工作原理。 8.机器人视觉的硬件系统由哪些部分组成? 9.为什么要做图像的预处理?机器视觉常用的预处理步骤有哪些? 10.请简述模糊控制器的组成及各组成部分的用途。 11.从描述操作命令的角度看,机器人编程语言可分为哪几类? 12.仿人机器人的关键技术有哪些? 三、论述题: 1.试论述机器人技术的发展趋势。 2.试论述精度、重复精度与分辨率之间的关系。 3.试论述轮式行走机构和足式行走机构的特点和各自适用的场合。 4.试论述机器人静力学、动力学、运动学的关系。 5.机器人单关节伺服控制中,位置反馈增益和速度反馈增益是如何确定的? 6.试论述工业机器人的应用准则。 四、计算题:(需写出计算步骤,无计算步骤不能得分): 1.已知点u的坐标为[7,3,2] T,对点u依次进行如下的变换:(1)绕z轴旋转90°得到点v; (2)绕y 轴旋转90°得到点w;(3)沿x轴平移4个单位,再沿y轴平移-3个单位,最后沿
第三章课后习题答案 3.3和3.4 步骤: 1、建立坐标系; 2、列D -H 参数表; 3、根据 写出 ; 4、根据 写出 3.3具体计算: i )()()()(111i Z i Z i X i X i i d D R a D R T θα---=T i i 1 -T T T T T N N N 12312010...-=T N αa d θ?? ????? ?????-=100001000000111 101 θθθθc s s c T ?? ??? ?? ?????-????????????-=100 00100 0001000 0010 010000 122 122 12θθθθc s L s c T ?? ??? ???????-=1000010 00003323323 θθθθc s L s c T T T T T B w 2 3 1201=
i 3.8具体计算: 因为标定过程中{G}和{T}是重合的,所以 则: αa d θ????????????+-=1000100000021111101L L c s s c T θθθθ?? ??? ?? ?????-????????????-=100 0010000001000001001000001222212θθθθc s s c T ????????????-=100001000003333323 θθθθc s L s c T T T B G B T =T T T T S G B S W T B W =T T T T S G B S B W W T 1-=
3.13、3.15—3.21答案 ? ? ? ? ? ? ? ? ? ? ? ? = 1 2 2 l P tip tip tip P T P2 2 0=
机器人学导论期末作业 题目: (图说明,图中的圆柱是只沿特定的转轴方向转动的转动副,不是空间圆柱副,没有沿轴线方向的移动) 要求:应用螺旋理论方法求解该机构运动的自由度以及受到的约束。 过程求解: 1、 首先先求解每个分支运动链的运动螺旋系。分析1分支运动系: (1) 11R 的分析。首先该转动副的轴线方向与x 轴相同,所以我将取它的(10 0)s =, 1111 11()r x y z =, 求解011 111111111111(0)10 0i j k s r s x y z z j y k z y ?? ? =?==-=- ? ?? ? , 所以运动螺旋111111(100;0)R z y =- (2) 因为12R 、13R 的轴线方向与11R 相同,都是平行于x 轴,所以它们的s 是相同的,均为 (100)s =,只是相对于坐标原点的位置不同,向量r 不同,所以最终求得各自的运 动螺旋为121212(10 0;0)R z y =-,131313(100;0)R z y =-。
(3) 综上可得,分支运动链1的运动螺旋系为:1111111212 1213 1313(100;0)(100;0)(100;0) R z y R z y R z y =-?? =-??=-?,根据 互矩为0,可以求出该分支的约束螺旋系111213 (100;000)(000;010)(000;001)r r r R R R ?=?=??=?,其中11r R 表 示作用在x 轴线上的约束线矢,12r R 表示绕y 轴的约束力偶,13 r R 表示绕z 轴的约束力偶。 2、 分析3分支运动系。由于分支3的各转动副的轴线方向完全与分支1的对应相同,都平 行于x 轴,所以同理可得分支3的运动螺旋系为3131 313232 3233 3333(100;0)(100;0)(100;0) R z y R z y R z y =-?? =-??=-?, 而相应的约束螺旋系为313233 (100;000)(000;010)(000;001)r r r R R R ?=?=??=?,其中31r R 表示作用在x 轴线上 的约束线矢,32r R 表示绕y 轴的约束力偶,33r R 表示绕z 轴的约束力偶。 3、 分析2分支运动系。 (1) 21R 的分析首先该转动副的轴线方向与y 轴相同,所以我将取它的(010)s =, 212121() r x y z =, 求解 02 1 (0) 01 i j k s r s x y ?? ?=?==-+=- ? ?? ? ,所以运动螺旋1121 21(010;0)R z x =- (2) 同理可求得, 122222(010;0)R z x =-,132323(010;0)R z x =-。 (3) 综上所述,分支运动链2的运动螺旋系为:21212122222223 2323(010;0) (010;0)(010;0)R z x R z x R z x =-?? =-??=-?,约束 螺旋系为:212223 (010;000)(000;100)(000;001)r r r R R R ?=?=??=?, 其中21r R 表示作用在y 轴线上的约束线矢,22 r R 表示作绕x 轴的约束力偶,23r R 表示作绕z 轴的用在z 轴上的约束力偶。
2.1 solution: According to the equation of pure transition transformation,the new point after transition is as follows: 1002350 10358(,,)00147110 00111trans x y z old P Trans d d d P ?????? ??????? ?????=?==?????? ?????? ?????? 2.3 solution: According to the constraint equations: 0;0;01 n a n o a o n ?=?=?== Thus,the matrix should be like this: 0015001 51003100301020102000 1000 1or --????????-? ?? ?????--? ?? ????? 2.4 Solution:
X Y Z P P P ?? ? ? ???=cos 0sin 010sin 0cos θθθθ?? ? ? ?-? ?0n a P P P ?? ? ? ??? 2.7 Solution: According to the equation of pure rotation transformation , the new coordinates are as follows: 10022(,45)0 3402 22new P rot x P ???? ?? ????? ?????=?==???????????????? ????? ??? 2.9 Solution: Acording to the equations for the combined transformations ,the new coordinates are as follows:
《机器人学导论》课程复习资料 一、名词解释: 1.自由度 2.机器人工作载荷 3.柔性手 4.制动器失效抱闸 5.机器人运动学 6.机器人动力学 7.虚功原理 8.PWM驱动 9.电机无自转 10.直流伺服电机的调节特性 11.直流伺服电机的调速精度 12.PID控制 13.压电元件 14.图像锐化 15.隶属函数 16.BP网络 17.脱机编程 18.AUV 二、简答题: 1.机器人学主要包含哪些研究内容? 2.机器人常用的机身和臂部的配置型式有哪些? 3.拉格朗日运动方程式的一般表示形式与各变量含义? 4.机器人控制系统的基本单元有哪些? 5.直流电机的额定值有哪些? 6.常见的机器人外部传感器有哪些? 7.简述脉冲回波式超声波传感器的工作原理。 8.机器人视觉的硬件系统由哪些部分组成? 9.为什么要做图像的预处理?机器视觉常用的预处理步骤有哪些? 10.请简述模糊控制器的组成及各组成部分的用途。 11.从描述操作命令的角度看,机器人编程语言可分为哪几类? 12.仿人机器人的关键技术有哪些? 三、论述题: 1.试论述机器人技术的发展趋势。 2.试论述精度、重复精度与分辨率之间的关系。 3.试论述轮式行走机构和足式行走机构的特点和各自适用的场合。 4.试论述机器人静力学、动力学、运动学的关系。 5.机器人单关节伺服控制中,位置反馈增益和速度反馈增益是如何确定的? 6.试论述工业机器人的应用准则。 四、计算题:(需写出计算步骤,无计算步骤不能得分): 1.已知点u的坐标为[7,3,2]T,对点u依次进行如下的变换:(1)绕z轴旋转90°得到点v;(2)绕y 轴旋转90°得到点w;(3)沿x轴平移4个单位,再沿y轴平移-3个单位,最后沿z轴平移7个单位得到点t。求u, v, w, t各点的齐次坐标。
. 中南大学网络教育课程考试复习题及参考答案 机器人学导论 一、名词解释题: 二、简答题: 1.机器人学主要包含哪些研究容? 2.机器人常用的机身和臂部的配置型式有哪些? 3.拉格朗日运动方程式的一般表示形式与各变量含义? 4.机器人控制系统的基本单元有哪些? 三、论述题: 1.试论述机器人技术的发展趋势。 2.试论述精度、重复精度与分辨率之间的关系。 4.试论述机器人静力学、动力学、运动学的关系。 四、计算题:(需写出计算步骤,无计算步骤不能得分): 1. 已知点u的坐标为 [7,3,2]T ,对点 u 依次进行如下的变换:(1)绕 z 轴旋转90°得到点v;(2)绕 y 轴旋转90°得到点 w;(3)沿 x 轴平移4个单位,再沿y 轴平移-3个单位,最后沿z 轴平移7个单位得到点t 。求 u,v, w,t 各点的齐次坐标。 z t v w O y x u 2. 如图所示为具有三个旋转关节的3R 机械手,求末端机械手在基坐标系{ x0, y0} 下的运动学方程。 θ3 L3 θ2 y0 L2 L1 θ1 O x0 3. 如图所示为平面的两旋转关节机械手,已知机器人末端的坐标值{ x, y} ,试求其关节旋转变量θ 1 和 θ2.
. P θ2 y L2 L 1 θ1 x 4. 如图所示两自由度机械手在如图位置时(θ1= 0 ,A f x0 ]T B θ 2=π/2),生成手爪力F = [或 F = [ 0f y]T。求对应的驱动力τA和τB。 y F B 0 f y P F A f x τ2 L2 τ1 x L1 5. 如图所示的两自由度机械手,手部沿固定坐标系在手上X0轴正向以 1.0m/s的速度移动,杆长 l 1=l 2=0.5m。设在某时刻θ1=30°,θ2=-6 0°,求该时刻的关节速度。已知两自由度机械手速度雅可比矩阵为 l1s 1l2 s12l2 s12 J l2c12l2c12 l1c 1 y0 l1 -θ2 y3 θ 1l2 v3 O x0 x3
西安高学考试复习题及参考答案 机器人学导论 一、名词解释题: 1.自由度: 2.机器人工作载荷: 3.柔性手: 4.制动器失效抱闸: 5.机器人运动学: 6.机器人动力学: 7.虚功原理: 8.PWM驱动: 9.电机无自转: 10.直流伺服电机的调节特性: 11.直流伺服电机的调速精度: 12.PID控制: 13.压电元件: 14.图像锐化: 15.隶属函数: 16.BP网络: 17.脱机编程: 18.AUV: 二、简答题: 1.机器人学主要包含哪些研究内容? 2.机器人常用的机身和臂部的配置型式有哪些? 3.拉格朗日运动方程式的一般表示形式与各变量含义? 4.机器人控制系统的基本单元有哪些? 5.直流电机的额定值有哪些? 6.常见的机器人外部传感器有哪些? 7.简述脉冲回波式超声波传感器的工作原理。 8.机器人视觉的硬件系统由哪些部分组成? 9.为什么要做图像的预处理?机器视觉常用的预处理步骤有哪些? 10.请简述模糊控制器的组成及各组成部分的用途。 11.从描述操作命令的角度看,机器人编程语言可分为哪几类? 12.仿人机器人的关键技术有哪些? 三、论述题: 1.试论述机器人技术的发展趋势。 2.试论述精度、重复精度与分辨率之间的关系。 3.试论述轮式行走机构和足式行走机构的特点和各自适用的场合。 4.试论述机器人静力学、动力学、运动学的关系。 5.机器人单关节伺服控制中,位置反馈增益和速度反馈增益是如何确定的? 6.试论述工业机器人的应用准则。 四、计算题:(需写出计算步骤,无计算步骤不能得分): 1.已知点u的坐标为[7,3,2]T,对点u依次进行如下的变换:(1)绕z轴旋转90°得到点v;(2)绕y 轴旋转90°得到点w;(3)沿x轴平移4个单位,再沿y轴平移-3个单位,最后沿z轴平移7个单位得到点t。求u, v, w, t各点的齐次坐标。
机器人学导论(克雷格)第二 章作业答案 -标准化文件发布号:(9456-EUATWK-MWUB-WUNN-INNUL-DDQTY-KII
2.1 solution: According to the equation of pure transition transformation,the new point after transition is as follows: 100235010358(,,)0014711000111trans x y z old P Trans d d d P ??????????????????=?==?????????????????? 2.3 solution: According to the constraint equations: 0;0;0 1n a n o a o n ?=?=?== Thus,the matrix should be like this: 00150015100310030102010200010001or --????????-????????--???????? 2.4 Solution:
X Y Z P P P ?? ? ? ???=cos 0sin 010sin 0cos θθθθ?? ? ? ?-??0n a P P P ?? ? ? ??? 2.7 Solution: According to the equation of pure rotation transformation , the new coordinates are as follows: 10022222(,45)0 3422720222new P rot x P ??????????? ?????=?==???????????????????????? 2.9 Solution: Acording to the equations for the combined transformations ,the new coordinates are as follows:
Chapter5: Velocities and Static Forces
?Objective : we will examine the linear and angular velocity of a rigid body and analyze the motion of a manipulator.t t Q t t Q Q dt d V B B t B Q B ???+==→?)()(lim )(0?The derivative of a vector ?It is important to indicate the frame in which the vector is differentiated. )) (()(Q dt d V B A Q B A =?The velocity vector can be represented in terms of any frame (reference frame) ) ()(Q B A B Q B A V R V =differentiated in {B} differentiated in {B},written in {A}
?We often consider the velocity of the origin of a frame relative to some non-moving universe reference frame. CORG U c V v ={U} is the reference frame Example 5.1 {T} {C} {U} mph v C 30=mph v T 100=?)(CORG U U P dt d ? )(TORG U C V ? )(CORG T C V R U T R U C
机器人学导论作业答案 作业一 一、问答题 1.答:机器人的主要应用场合有: (1) 恶劣的工作环境和危险工作; (2) 在特殊作业场合进行极限作业; (3) 自动化生产领域; (4) 农业生产; (5) 军事应用。 2.答:工业机器人(英语:industrial robot。简称IR)是广泛适用的能够自主动作,且多轴联动的机械设备。它们在必要情况下配备有传感器,其动作步骤包括灵活的转动都是可编程控制的(即在工作过程中,无需任何外力的干预)。它们通常配备有机械手、刀具或其他可装配的的加工工具,以及能够执行搬运操作与加工制造的任务。 数控机床是数字控制机床的简称,是一种装有程序控制系统的自动化机床。该控制系统能够逻辑地处理具有控制编码或其他符号指令规定的程序,并将其译码,从而使机床动作并加工零件。 3.答:科幻作家阿西莫夫机器人三原则:(1) 不伤害人类;(2) 在
原则下服从人给出的命令;(3) 在与上两个原则不矛盾的前提下保护自身。 我国科学家对机器人的定义是:“机器人是一种自动化的机器,所不同的是这种机器具备一些与人或生物相似的智能能力,如感知能力、规划能力、动作能力和协同能力,是一种具有高度灵活性的自动化机器。 4.答:机器人研究的基础内容有以下几方面: (1) 空间机构学; (2) 机器人运动学; (3) 机器人静力学; (4) 机器人动力学; (5) 机器人控制技术; (6) 机器人传感器; (7) 机器人语言。 5.答:按几何结构分: (1) 直角坐标式机器人; (2) 圆柱坐标式机器人;
(3) 球面坐标式机器人; (4) 关节式球面坐标机器人。 6.答:通常由四个相互作用的部分组成:执行机构、驱动单元、控制系统、智能系统。 7.答:一共需要5个:定位3个,放平稳2个。 8.答:机器人的主要特点有通用性、适应性。决定通用性有两方面因素:机器人自由度;末端执行器的结构和操作能力。 9.答:工业机器人的手部是用来握持工件或工具的部件。大部分的手部结构都是根据特定的工件要求而专门设计的。各种手部的工作原理不同,故其结构形态各异。常用的手部按其握持原理可以分为夹持类和吸附类两大类。 10.答:(a) 机械部分;(b) 一个或多个传感器;(c) 控制器;(d) 驱动源。 11.答:自由度的选择与生产要求有关,若批量大,操作可靠性要求高,运行速度快,机器人的自由度数可少一些;如果要便于产品更换,增加柔性,机器人的自由度要多一些。 12.答:轮式行走机器人是机器人中应用最多的一种机器人,在相对平坦的地面上,用车轮移动方式行走是相当优越的。
第一章绪论 1.机器人三守则: 1)机器人必须不危害人类,也不允许它眼看人将受害而袖手旁观; 2)机器人必须绝对服从于人类,除非这种服从有害于人类; 3)机器人必须保护自身不受伤害,除非为了保护人类或是为人类做出牺牲。 2.机器人的定义共同处: 1)像人或人的上肢,并能模仿人的动作; 2)具有智力或感觉与识别能力; 3)是人造的机器或机械电子装置。 3.机器人的主要特点: ①通用性:机器人的通用性取决于其几何特性和机械能力。通用性指的是执行不同的功能和完成多样的简单任务的实际能力。通用性也意味着,机器人具有可变的几何结构。 ②适应性:机器人的适应性是指其对环境的自适应能力,即所设计的机器人能够自我执行未经完全指定的任务,而不管任务执行过程中所发生的没有预计到的环境变化。这一能力要求机器人认识其环境,即具有人工知觉。 4.机器人系统的结构: 一个机器人系统由四个相互作用的部分组成:机械手、环境、任务和控制器。 机械手是具有传动执行装置的机械,它由臂、关节和末端执行装置(工具等)构成,组合为一个互相连接和互相依赖的运动机构。 环境是指机器人所处的周围环境。 我们把任务定义为环境的两种状态(初始状态和目标状态)间的差别。 计算机是机器人的控制器或脑子。 5.机器人的自由度: 物体能够对坐标系进行独立运动的数目称为自由度。物体所能进行的运动包括:沿着坐标轴ox、oy、oz的三个平移运动T1,T2,T3;绕着坐标轴ox、oy、oz的三个旋转运动R1,R2,R3。自由度是机器人的一个重要技术指标,它是由机器人的结构决定的,并直接影响到机器人的机动性。 6.机器人的分类: ①按机械手的几何结构来分: 1)柱面坐标机器人
(一) 单选题 1、 IML 语言就是一种()编程语言。 (A) 动作级 (B) 对象级 (C) 任务级 (D) 自主级 参考答案: (A) 2、 如图所示为美国TRC 公司于1985年开始研制医院用的 机器人,这就 是一款()。 (A) 工业机器人 (B) 军用机器人 (C) 服务机器人 (D) 仿人机器人 参考答案: (C) 3、 RAPT 语言就是一种()编程语言。 (A) 动作级 (B) 对象级 (C) 任务级 (D) 自主级 参考答案: (B) 4、 AUTOPASS 语言就是一种()编程语言。
(A) 动作级 (B) 对象级 (C) 任务级 (D) 自主级 参考答案: (B) 5、 神经元建模时,如图所示的激发函数属于()。 (A) 极点型 (B) 阶跃型 (C) 线性型 (D) S 型 参考答案: (D) 6、 BP 神经网络最早就是由()提出的。 (A) McCulloch 与Pitts (B) Hebb (C) Rumelhart (D) Hopfield 参考答案: (C) 7、 VAL 语言就是由()开发的。 (A) 美国 (B) 日本 (C) 英国 (D) 意大利 参考答案: (A) 8、 如图所示为日本本田公司研制的ASIMO 机器人,这就是一款()。
(A) 工业机器人 (B) 军用机器人 (C) 服务机器人 (D) 仿人机器人 参考答案: (D) 9、 模糊理论就是由()创立的。 (A) G 、Contor (B) B 、Russell (C) L 、A 、Zadeh (D) E 、H 、Mamdani 参考答案: (C) 10、 目前,()就是技术上最成熟、应用最广泛的机器人。 (A) 工业机器人 (B) 探险机器人 (C) 服务机器人 (D) 仿人机器人 参考答案: (B) 11、 RAPT 语言就是由()开发的。 (A) 美国 (B) 日本 (C) 英国 (D) 意大利 参考答案:
2.1 solution: Acc ordi ng t o th e equatio n of pure tra nsi tion tr ansformati on,the n ew point aft er transiti on i s as fo ll ows: 100235010358(,,)0014711000111trans x y z old P Trans d d d P ??????????????????=?==?????????????????? 2.3 sol ution : A cc or ding to th e c onstr ai nt e quat ion s: 0;0;0 1n a n o a o n ?=?=?== Th us ,the m atrix sho ul d be like th is: 00150015100310030102010200010001or --????????-????????--???????? 2.4 Soluti on:
X Y Z P P P ?? ? ? ???=cos 0sin 010sin 0cos θθθθ?? ? ? ?-??0n a P P P ?? ? ? ??? 2.7 Solution : Acco rdin g to t he e qu ation of pure ro ta tio n tr ans formation , the new coord ina tes are as fol low s: 10022(,45)0 340222new P rot x P ??????????? ?????=?==???????????????????????? 2.9 Sol ution: Acordin g to t he equa tions for the combin ed tr ansf orma tion s ,th e new co ordinates are as follows :
机器人学导论 一、名词解释题: 1.自由度: 2.机器人工作载荷: 3.柔性手: 4.制动器失效抱闸: 5.机器人运动学: 6.机器人动力学: 7.虚功原理: 驱动: 9.电机无自转: 10.直流伺服电机的调节特性: 11.直流伺服电机的调速精度: 控制: 13.压电元件: 14.图像锐化: 15.隶属函数: 网络: 17.脱机编程: : 二、简答题: 1.机器人学主要包含哪些研究内容 2.机器人常用的机身和臂部的配置型式有哪些 3.拉格朗日运动方程式的一般表示形式与各变量含义 4.机器人控制系统的基本单元有哪些 5.直流电机的额定值有哪些 6.常见的机器人外部传感器有哪些 7.简述脉冲回波式超声波传感器的工作原理。 8.机器人视觉的硬件系统由哪些部分组成 9.为什么要做图像的预处理机器视觉常用的预处理步骤有哪些 10.请简述模糊控制器的组成及各组成部分的用途。 11.从描述操作命令的角度看,机器人编程语言可分为哪几类 12.仿人机器人的关键技术有哪些 三、论述题: 1.试论述机器人技术的发展趋势。 2.试论述精度、重复精度与分辨率之间的关系。 3.试论述轮式行走机构和足式行走机构的特点和各自适用的场合。 4.试论述机器人静力学、动力学、运动学的关系。 5.机器人单关节伺服控制中,位置反馈增益和速度反馈增益是如何确定的 6.试论述工业机器人的应用准则。 四、计算题:(需写出计算步骤,无计算步骤不能得分): 1.已知点u的坐标为[7,3,2]T,对点u依次进行如下的变换:(1)绕z轴旋转90°得到点v;(2)绕y 轴旋转90°得到点w;(3)沿x轴平移4个单位,再沿y轴平移-3个单位,最后沿z轴平移7个单位得到点t。求u, v, w, t各点的齐次坐标。
课程考试复习题及参考答案 一、名词解释题: 1.自由度: 2.机器人工作载荷: 3.柔性手: 4.制动器失效抱闸: 5.机器人运动学: 6.机器人动力学: 7.虚功原理: 8.PWM驱动: 9.电机无自转: 10.直流伺服电机的调节特性: 11.直流伺服电机的调速精度: 12.PID控制: 13.压电元件: 14.图像锐化: 15.隶属函数: 16.BP网络: 17.脱机编程: 18.AUV: 二、简答题: 1.机器人学主要包含哪些研究内容? 2.机器人常用的机身和臂部的配置型式有哪些? 3.拉格朗日运动方程式的一般表示形式与各变量含义? 4.机器人控制系统的基本单元有哪些? 5.直流电机的额定值有哪些? 6.常见的机器人外部传感器有哪些? 7.简述脉冲回波式超声波传感器的工作原理。 8.机器人视觉的硬件系统由哪些部分组成? 9.为什么要做图像的预处理?机器视觉常用的预处理步骤有哪些? 10.请简述模糊控制器的组成及各组成部分的用途。 11.从描述操作命令的角度看,机器人编程语言可分为哪几类? 12.仿人机器人的关键技术有哪些? 三、论述题: 1.试论述机器人技术的发展趋势。 2.试论述精度、重复精度与分辨率之间的关系。 3.试论述轮式行走机构和足式行走机构的特点和各自适用的场合。 4.试论述机器人静力学、动力学、运动学的关系。 5.机器人单关节伺服控制中,位置反馈增益和速度反馈增益是如何确定的? 6.试论述工业机器人的应用准则。 四、计算题:(需写出计算步骤,无计算步骤不能得分): 1.已知点u的坐标为[7,3,2]T,对点u依次进行如下的变换:(1)绕z轴旋转90°得到点v;(2)绕y轴 旋转90°得到点w;(3)沿x轴平移4个单位,再沿y轴平移-3个单位,最后沿z轴平移7个单位得到点t。求u, v, w,t各点的齐次坐标。
2.1 solution: According to the equation of pure transition transformation,the new point after transition is as follows: 1002350 10358(,,)00147110 00111trans x y z old P Trans d d d P ?????? ??????? ?????=?==?????? ?????? ?????? 2.3 solution: According to the constraint equations: 0;0;01 n a n o a o n ?=?=?==r r r r r r r Thus,the matrix should be like this: 0015001 51003100301020102000 1000 1or --????????-? ?? ?????--? ?? ????? 2.4 Solution:
X Y Z P P P ?? ? ? ???=cos 0sin 010sin 0cos θθθθ?? ? ? ?-? ?0n a P P P ?? ? ? ??? 2.7 Solution: According to the equation of pure rotation transformation , the new coordinates are as follows: 10022(,45)0 3402 22new P rot x P ???? ?? ????? ?????=?==???????????????? ????? ??? o 2.9 Solution: Acording to the equations for the combined transformations ,the new coordinates are as follows: