文章编号:1005—5630(2001)03—0012—05
距离法运动目标激光跟踪测量系统的研究
Ξ
刘永东,王 佳,胡朝晖,梁晋文
(清华大学精密仪器与机械学系精密测试技术与仪器国家重点实验室,北京100084)
摘要:运动目标空间位置坐标激光跟踪测量是计量测试领域的前沿课题。该测量系统集激光干涉测距、光电检测、精密机械、计算机及控制系统和现代数值计算于一体,对空间运动目标进行跟踪并实时测量其坐标和姿态。采用多个激光干涉仪进行冗余设计,仅通过测量距离的变化量而不需要测量角度量,就可以通过解最小二乘方程组计算出被测点的坐标。文中论述了纯距离法跟踪测量的数学模型、系统的光路设计以及基于P I D 控制方法的跟踪控制系统,并完成了平面内运动物体的跟踪及测量可行性实验。
关键词:激光跟踪;距离法;坐标测量中图分类号:TB 92 文献标识码:A
La ser track i ng syste m for coord i na te m ea sure m en t of m ov i ng target by length -m ea sured m ethod
L IU Y ong 2d ong ,W A N G J ia ,H U Z hao 2hu i ,L IA N G J in 2w en
(State Key L abo rato ry of P recisi on M easurem ent T echno logy and Instrum ents D epartm ent of P recisi on Instrum ents ,T singhua U niversity ,Beijing 100084,Ch ina )
Abstract :T he laser track ing system fo r m easu ring the coo rdinate of spatial m oving targets is a
new ly 2developed aspect and fron tier in m etro logy .T he m easu ring system is a com b inati on of the techn iques of laser in terferom etry ,p ho toelectric detecti on ,p recisi on m echan is m ,com pu ter con tro l system and m odern num erical com p u tati on .T he m oving targets are tracked and its spatial po siti on and attitude m easu red in real ti m e .If m o re than one laser in terferom eters are u sed to give a redundan t design ,the po siti on of m oving target can be ob tained by the least 2square m ethod w ith the datum of length variati on .T he m athem atical m odel of the laser track ing and m easu ring system by length 2m easu red m ethod are discu ssed .T he op tical design and the track ing con tro lling system based on the P I D con tro lling p rinci p le are p resen ted .T he experi m en t resu lts of track ing and m easu ring the coo rdinate of a m oving target in 2D p lane are given .
Key words :laser track ing ;length 2m easu red m ethod ;coo rdinate m easu rem en t
1 引 言
运动目标空间位置的实时测量方法种类很多,原理和精度差别较大。各种测量方法中,测量精度最高的是采用激光动态跟踪测量,它是激光技术在测试领域的最新应用,是计量测试领域的一个新的发展方向[1~3]。动态跟踪测量难度大,测量精度要求高(微米量级),计算过程繁琐,系统结构复杂。而计算机技术、
第23卷 第3期 2001年6月
光 学 仪 器O PT I CAL I N STRUM EN T S
V o l .23,N o 13
June,2001
Ξ
收稿日期:2000203229
作者简介:刘永东(19692),男,安徽人,清华大学博士,现在美国U tah 大学作博士后,主要从事激光跟踪测量和微光机电系统的研究。
激光跟踪测量技术、现代控制技术和数据处理方法的发展为动态几何量测量提供了建立实用化系统的技
术条件。
2 距离法激光跟踪测量原理
运动目标动态位置激光跟踪测量比较可行的方案为采用三角法和干涉法测量原理[4]。三角法通过测量角度量计算目标位置。在干涉法中,根据跟踪测量机构的数量分为一站法和多站法。一站法利用长度量
和角度量测量来计算目标位置,多站法仅通过测量长度的变动量也就是纯距离法来确定目标位置。211 系统测量的数学模型
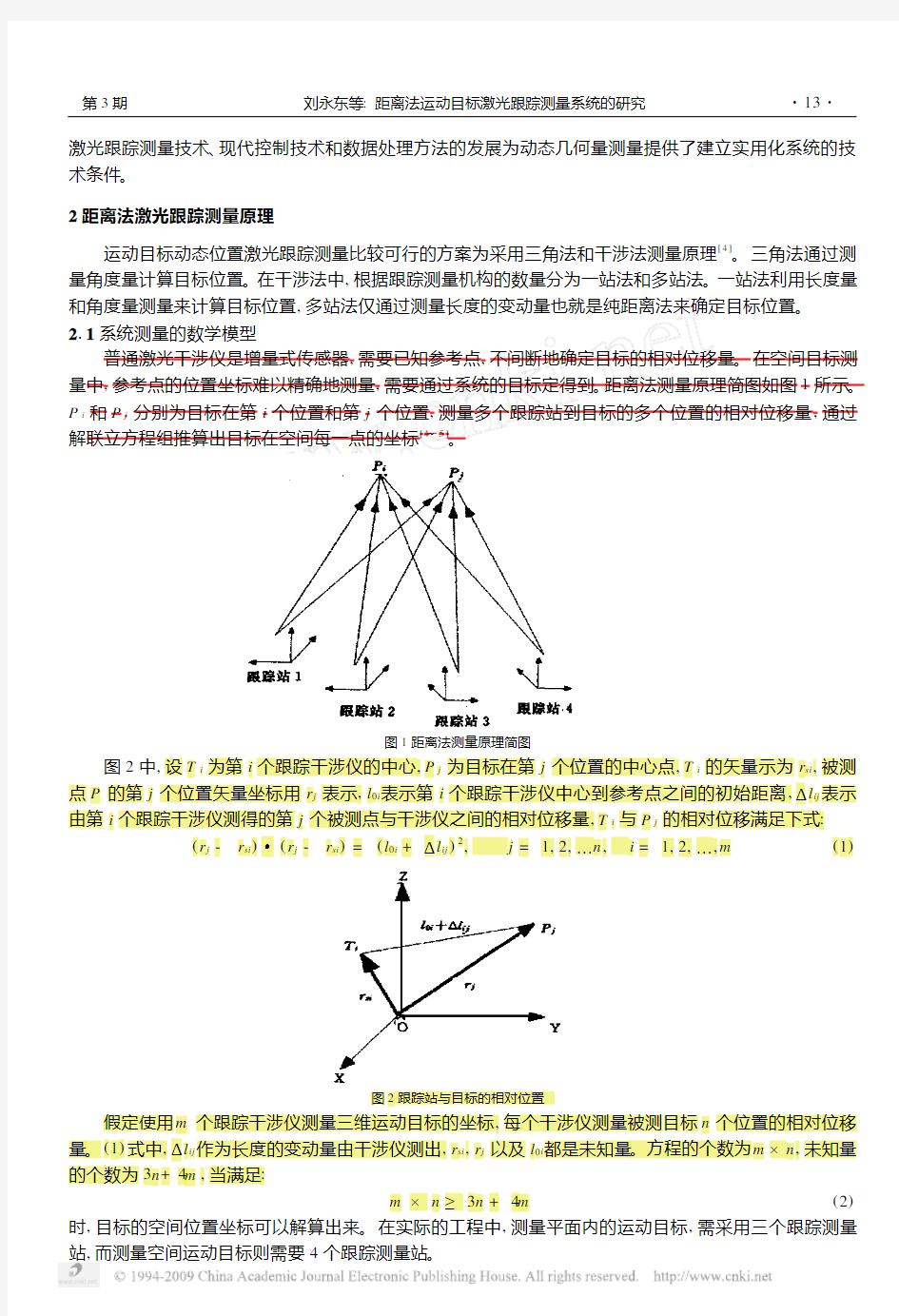
普通激光干涉仪是增量式传感器,需要已知参考点,不间断地确定目标的相对位移量。在空间目标测量中,参考点的位置坐标难以精确地测量,需要通过系统的目标定得到。距离法测量原理简图如图1所示。
P i 和P j 分别为目标在第i 个位置和第j 个位置,测量多个跟踪站到目标的多个位置的相对位移量,通过
解联立方程组推算出目标在空间每一点的坐标[4~5]。
图1 距离法测量原理简图
图2中,设T i 为第i 个跟踪干涉仪的中心,P j 为目标在第j 个位置的中心点,T i 的矢量示为r si ,被测点P 的第j 个位置矢量坐标用r j 表示,l 0i 表示第i 个跟踪干涉仪中心到参考点之间的初始距离,?l ij 表示由第i 个跟踪干涉仪测得的第j 个被测点与干涉仪之间的相对位移量,T i 与P j 的相对位移满足下式:
(r j -r si ) (r j -r si )=(l 0i +?l ij )2, j =1,2,…n , i =1,2,…,m (1)
图2 跟踪站与目标的相对位置
假定使用m 个跟踪干涉仪测量三维运动目标的坐标,每个干涉仪测量被测目标n 个位置的相对位移
量。(1)式中,?l ij 作为长度的变动量由干涉仪测出,r si ,r j 以及l 0i 都是未知量。方程的个数为m ×n ,未知量的个数为3n +4m ,当满足:
m ×n ≥3n +4m
(2)时,目标的空间位置坐标可以解算出来。在实际的工程中,测量平面内的运动目标,需采用三个跟踪测量站,而测量空间运动目标则需要4个跟踪测量站。
?
31?第3期刘永东等: 距离法运动目标激光跟踪测量系统的研究
212 系统的光路设计
距离法激光跟踪测量系统中每个跟踪测量站的基本结构相同,系统的光路设计如图3所示。双频激光器既是光源又是测长传感器,光束通过分束器后被固定在一个精密驱动单元上的跟踪镜反射,射向安装在被测目标上的靶镜后光束平行返回,返回光束被跟踪镜又一次反射,通过分束器后分成两束,一束光回到干涉仪作为测量信号,另外一束光射向位敏探测器(PSD )。当目标运动时,返回的光束在位敏探测器上的位置发生相应的移动,二维位敏探测器测量出入射和反射光在水平和垂直方向的位移形成跟踪误差信号,分别控制驱动单元的两路直流力矩电机,使跟踪镜分别完成水平和垂直方向的旋转,并使跟踪误差最小。图中f 1
和f 2是偏振方向相互垂直且频率不同的两束激光,f 1作为参考光束,f 2作为测量光束。?f 是目标运动产生的频移。
图3
光学系统设计
213 系统的跟踪控制原理
直流力矩电机具有良好的静态和动态性能,可以实现无级调速,低速转动平稳。通过直流力矩电机直接驱动跟踪镜,可以完成对被测目标的快速跟踪。电机的控制系统框图如图4所示。引入测速反馈是为了消除死区和转速的不稳定;引入电流反馈可以消除电机反电动势的影响,提高电机的加速性能。直流调速系统是一个双环路系统,内回路是具有电流负反馈的电流环,外回路是具有速度负反馈的速度环。为了使系统达到无稳态误差,电流环及测速环均采用比例—积分调节器。
图4 系统跟踪控制单元原理框图
图中,s 为拉普拉斯变换中的复变量,V r 为位敏探测器的输出信号,G i (s )为电流调节器传递函数,G n (s )为速度调节器传递函数,K g 为直流测速机比例系数,a 为电流负反馈系数,T a 为电机的电气时间常数,T m 为电机的机械时间常数,R a 代表电枢电阻,Ξ代表电机的转速,C e 代表反电势系数,C m 代表电磁力矩系数,Σn 为积分时间常数。经过简化,直流调速系统的闭环传递函数为
Ξ(s )
V r (s )=
(1 K g )(Σn s +1)T m T a K 0
s 3+T i T m T a K 0
s 2
+Σn s +1
(3)?41? 光 学 仪 器第23卷
式中,T i 为电流环时间常数,K 0为闭环的增益常数。显然,这是一个三阶系统。通过合理选择各参数,该系
统可以可靠地跟踪速度为015m s 、加速度为5m s 2~10m s 2
的运动目标(在1m 范围内)。3 平面内运动目标跟踪测量实验
在系统设计的初期,我们采用三个跟踪测量站实现平面内运动目标的跟踪测量。整个系统的布置如图5所示,三个跟踪站固定在实验平台上,中心分别为A 、B 和C ,且和目标镜的中心P 在同一平面内,并给出它们的初估值(如图中标注)。为了简化计算,将坐标系的原点置于A ,并将B 置于X 轴的正半轴。目标镜P 固定在导轨上,并由步进电机带动沿水平方向运动。实验中,三个跟踪站实时地跟踪目标镜并测量出位移的变动量,通过解算方程组(1)计算出P 点的坐标。为了验证测量数据的正确性,另用一路双频激光干
涉仪D 测量出P 在每个对应标定点的位移坐标
,并和三站法测量的数据作比对,实验结果见表1。
图5 平面内跟踪运动目标的实验系统布局
表1
实验数据及结果
实验数据
实验结果
双频干涉仪D 的示数目标位移(mm )
双频干涉仪A 的示数?l 1(mm )
双频干涉仪B 的示数?l 2(mm )
双频干涉仪C 的示数?l 3(mm )
目标位移
(mm )误差
(Λm )01000010000010000010000-0101258-12158251000017898-316316-71263424199097-9103501000118526-619712-141273849199592-4108751000312099-1010154-211024274199300-71001001000418346-1217532-2715458100102273221731251000617355-1512234-331800412510072171211501000819136-1713874-3918056150100817811717510001113717-1912315-4515499175100717711720010001410883-2017849-5110494199199857-114322510001710755-2210642-5612794224198339-1616125010002013723-2310500-61124982501022322213227510002319190-2317205-65194962751014241412430010002717146-2410942-7013998299198414-1518632510003118000-2411601-7415703324197872-2112835010003611642-2319623-7814718350100611611137510004017754-2314253-8211129375100431413140010004516517-2216118-8514823400100291219142510005017894-2115331-88158714251020072010745010005611864-2011235-91141334501017231712347510006118490-1814078-9319512474199280-71205001000
6717522
-1614031
-9612369
499198764
-12136
?
51?第3期刘永东等: 距离法运动目标激光跟踪测量系统的研究
其中,?l 1、?l 2和?l 3分别为三个跟踪站测量出的位移变动量。由表1可以看出,在目标距离跟踪站215m 测量范围内,距离法测量的最大误差为2217Λm 。
对于距离法激光跟踪测量系统而言,影响系统测量精度的主要因素为目标镜结构造成的附加光程差、干涉仪测长误差、跟踪机构装校误差以及各个跟踪站间相互位置关系而造成的迭代收敛误差。其中:(1)由于系统中目标镜采用角隅棱镜,在不同的入射角时会引起附加光程差。本次实验中,入射角在10°左右,由此而产生的附加光程差大约为12Λm ,尽管对其进行了修正,但由于系统没有测角器件,修改精度只可能达到微米量级。因此,下一步的目标镜设计拟采用“猫眼”逆反射器,减小附加光程差。(2)另外一个主要的误差因素为各个跟踪站间的相互位置关系而造成的收敛误差。在距离法测量系统中,跟踪站的位置坐标以及跟踪站到目标镜的初始距离(统称为系统的几何参数)都是未知量,实际测量时通过自标定方法求出。但是,自标定需要解非线性最小二乘方程组,系统几何参数的迭代初始值、目标镜的采样位置间隔和采样次数、系统的跟踪误差都会影响系统几何参数的最终收敛精度,从而会带来计算坐标的误差,这部分的分析
较复杂。(3)双频激光干涉仪的测长精度高,并可以通过实际的气象参数修正(温度、气压和湿度)得到更大
的提高。修正后的干涉仪测量精度可以达到015Λm m 。(4)对于平面内距离法跟踪测量系统而言,跟踪机构的装校误差主要包括两部分:目标镜的反射面和电机的转轴不重合;光束和目标镜的交点没有调整到目标镜的转轴上。这部分的测量误差可以调整到015mm 以下,在215m 的测量范围内造成的相应测长误差为1Λm 左右。
所以,进一步的工作重点将致力于研究“自标定”对测量结果的影响规律及大小,并采用新的目标反射镜,同时尽可能减小并排除各种误差源,提高系统的精度。4 结 论
本文针对距离法激光跟踪测量系统建立了计算运动目标空间位置坐标的数学理论模型,并设计了对平面内运动目标实现实时跟踪测量的实验装置。实验结果表明,系统跟踪性能良好,位置测量精度高。同时分析了提高系统测量精度的可行性途径,为进一步实现空间运动目标的动态跟踪测量打下了坚实的基础。5 参考文献
[1] B C J iang .A review of recent developm ent in robo t m etro logy [J ].Journal of M anu .Sys .,1988,7(4):339~357.
[2] K L au ,R Kocken ,W C H aigh t .A utom atic laser track ing interferom eter system fo r robo t m etro logy [J ].P recisi on Engineering ,1986,8
(1):3~7.
[3] 刘永东,王 佳,梁晋文1运动目标空间位置坐标激光跟踪测量系统新进展[J ]1宇航计测技术,1997,17(6):27~311[4] 刘永东,王 佳,梁晋文1运动目标空间位置坐标激光跟踪测量的数学模型[J ].光学技术,1997,(6):30~331
[5] O N akam ura et al 1D evelopm ent of a coo rdinate m easuring system w ith track ing laser interferom eters[J ].A nnals of the C I R P,1991,40
(1):523~526.
?61? 光 学 仪 器第23卷
摘要 运动目标检测方法是研究如何完成对视频图像序列中感兴趣的运动目标区域的“准确定位”问题。光流场指图像灰度模式的表面运动,它可以反映视频相邻帧之间的运动信息,因而可以用于运动目标的检测。MATLAB这种语言可移植性好、可扩展性强,再加上其中有丰富的图像处理函数,所以利用MATLAB 软件来用光流法对运动目标的检测中具有很大的优势。本设计主要可以借助matlab软件编写程序,运用Horn-Schunck算法对图像前后两帧进行处理,画出图像的光流场。而图像的光流场每个像素都有一个运动矢量,因此可以反映相邻帧之间的运动,分析图像的光流场就可以得出图像中的运动目标的运动情况。 关键字:光流法;Horn-Schunck算法;matlab
目录 1光流法的设计目的 (1) 2光流法的原理 (1) 2.1光流法的介绍 (1) 2.1.1光流与光流场的概念 (1) 2.1光流法检测运动目标的原理 (2) 2.1.1光流场计算的基本原理 (2) 2.2.2基于梯度的光流场算法 (2) 2.2.3Horn-Schunck算法 (3) 2.2.4光流法检测运动目标物体的基本原理概述 (5) 3光流法的程序具体实现 (6) 3.1源代码 (6) 3.1.1求解光流场函数 (6) 3.1.2求导函数 (9) 3.1.3高斯滤波函数 (9) 3.1.4平滑性约束条件函数 (10) 3.1.5画图函数 (10) 4仿真图及分析 (12) 结论 (13) 参考文献 (14)
1 光流法的设计目的 数字图像处理,就是用数字计算机及其他有关数字技术,对图像进行处理,以达到预期的目的。随着计算机的发展,图像处理技术在许多领域得到了广泛应用,数字图像处理已成为电子信息、通信、计算机、自动化、信号处理等专业的重要课程。 数字图像处理课程设计是在学习完数字图像处理的相关理论后,进行的综合性训练课程,其目的是:使学生进一步巩固数字图像处理的基本概念、理论、分析方法和实现方法;增强学生应用Matlab编写数字图像处理的应用程序及分析、解决实际问题的能力;尝试所学的内容解决实际工程问题,培养学生的工程实践能力。 运动目标检测是数字图像处理技术的一个主要部分,近些年来,随着多媒体技术的迅猛发展和计算机性能的不断提高,动态图像处理技术日益受到人们的青睞,并且取得了丰硕的成果,广泛应用于交通管理、军事目标跟踪、生物医学等领域。 因此,基于光流法,实现运动目标的检测是本文的研究对象。结合图书馆书籍、网上资料以及现有期刊杂志,初步建立起运动目标检测的整体思路和方法。 2 光流法的原理 2.1 光流法的介绍 2.1.1 光流与光流场的概念 光流是指空间运动物体在观测成像面上的像素运动的瞬时速度,它利用图像序列像素强度数据的时域变化和相关性来确定各自像素位置的“运动”,即反映图像灰度在时间上的变化与景物中物体结构及其运动的关系。将二维图像平面特定坐标点上的灰度瞬时变化率定义为光流矢量。视觉心理学认为人与被观察物体
目标跟踪算法的分类
主要基于两种思路: a)不依赖于先验知识,直接从图像序列中检测到运动目标,并进行目标识别,最终跟踪感兴趣的运动目标; b)依赖于目标的先验知识,首先为运动目标建模,然后在图像序列中实时找到相匹配的运动目标。 一.运动目标检测 对于不依赖先验知识的目标跟踪来讲,运动检测是实现跟踪的第一步。运动检测即为从序列图像中将变化区域从背景图像中提取出来。运动目标检测的算法依照目标与摄像机之间的关系可以分为静态背景下运动检测和动态背景下运动检测 (一)静态背景 1.背景差 2.帧差 3.GMM 4.光流 背景减算法可以对背景的光照变化、噪声干扰以及周期性运动等进行建模,在各种不同情况下它都可以准确地检测出运动目标。因此对于固定
个关键技术: a)匹配法则,如最大相关、最小误差等 b)搜索方法,如三步搜索法、交叉搜索法等。 c) 块大小的确定,如分级、自适应等。 光流法 光流估计的方法都是基于以下假设:图像灰度分布的变化完全是目标或者场景的运动引起的,也就是说,目标与场景的灰度不随时间变化。这使得光流方法抗噪声能力较差,其应用范围一般局限于目标与场景的灰度保持不变这个假设条件下。另外,大多数的光流计算方法相当复杂,如果没有特别的硬件装置,其处理速度相当慢,达不到实时处理的要求。 二.目标跟踪 运动目标的跟踪,即通过目标的有效表达,在图像序列中寻找与目标模板最相似候选目标区位置的过程。简单说,就是在序列图像中为目标定位。运动目标的有效表达除了对运动目标建模外,目标跟踪中常用到的目标特性表达主要包括视觉特征 (图像边缘、轮廓、形状、纹理、区域)、统计特征 (直方图、各种矩特征)、变换系数特
基于openCV的动态背景下的运动目标检测 摘要:介绍在动态背景下对视频图像序列进行运动目标的检测,主要包括三个步骤,分别是运动估计,运动补偿和目标检测。在运动估计中采用的主要是基于特征点匹配算法。这种算法与传统的块匹配算法最大的好处在于它的数据量少,计算简单迅速而且图像的匹配可靠性更高。最后用计算机视觉类库openCV进行实现。 关键词:运动目标检测;openCV;特征点匹配 Moving Object Detection in the Dynamic Background Based on openCV Abstract:Introducing a moving object detection algorithm of the dynamic background in the video image sequence,which includes three steps. They are motion estimation, motion compensation and object detection. At the motion estimation, we take an algorithm based on the feature points matching. The advantages of this algorithm is that it needs fewer data and indicates faster calculating speed compared to the block matching algorithm. What’s more, the matching of the video image sequence is more reliable. Then used openCV realized the algorithm. Keywords: moving object detection; openCV; feature points matching 引言 在生活中摄像头可以说随处可见,我们经常需要对视频中的运动目标进行相关操作,这就设涉及到了对运动目标的检测及跟踪。作为视觉领域的一部分,它不仅对我们的生活,在军事,医学等各种领域里都有着广泛的影响。 所谓运动目标的检测就是在一段序列图像中检测出变化区域,并将运动目标从背景图像中提取出来[2],它是基础,能否正确的检测与分割出运动目标对后续的工作有着巨大的影响。常见的运动目标检测方法有:背景差分法,帧差法,累积差分法,光流法。本文主要介绍的是一种在动态背景下对运动目标进行检测的算法。 检测算法介绍 检测算法有很多种,不同的算法有他们各自的利与弊。背景差分法:是事先将背景图像存储下来,再与观测图像进行差分运算,实现对运动区域的检测。这种方法能得到较为完整的运动目标信息,但背景图像必须随着外部条件比如光照等的变化而不断更新,所以背景模型的获取和更新比较麻烦。帧差法:直接比较相邻两帧图像对应像点的灰度值的不同,然后通过阈值来提取序列图像中的运动区域[2]。这种方法更新速度快,算法简单易实现,适应性强,不需要获取背景图像。但是背景与运动目标间需要有一定程度的灰度差,否则可能在目标内部产生空洞,不能完整的提取出运动目标。为了改进相邻两帧间的差分效果,人们提出了累积差分法。累积差分法是利用三帧图像计算两个差分图像,再令其对应像素相乘的算法。它通过分析整个图像序列的变化来检测小位移或缓慢运动的物体。光流法是在时间上连续的两幅图想中,用向量来表示移动前后的对应点,在适当平滑性约束的条件下,根据图像序列的时空梯度估计运动场,通过分析运动场的变化对运动目标和场景进行检测和分割。 上面的几种算法都是基于静态背景下的方法,下面主要介绍动态背景下运动目标的检测。 因为生活中我们在很多情况下背景图像都不是静态的,有时摄像机都是安装在一个运动
摘要 由于计算机技术的迅猛发展,使得基于内容的视频信息的存取、操作和检索不仅成为一种可能,更成为一种需要。同时,基于内容的视频编码标准MPEG-4和基于内容的视频描述标准MPEG-7正在发展和完善。因此提取和视频中具有语义的运动目标是一个急需解决的问题。运动目标提取和检测作为视频和图像处理领域的重要研究领域,有很强的研究和应用价值。运动检测就是将运动目标从含有背景的图像中分离出来,如果仅仅依靠一种检测算法,难以从复杂的自然图像序列中完整地检测出运动的目标。较高的检测精度和效率十分重要,因此融合多种检测方法的研究越来越受到重视。本文介绍了几种国内外文献中的经典的视频运动目标的检测和提取算法,并对各种方法进行了评价和总结。首先介绍了基本的运动目标检测的基本知识和理论,然后介绍了基本的几种目标检测方法及其各种改进方法。对今后的运动目标检测提取的相关研究提供一定的参考。 关键词:运动目标检测光流法帧差法背景建模方法
ABSTRACT Because of the rapid development of computer technology, it is possible to access, operate and retrieve the video information based on the content of the video. At the same time, based on the content of the video coding standard MPEG-4 and content-based video description standard MPEG-7 is developing and improving. Therefore, it is an urgent problem to be solved in the extraction and video. Moving object extraction and detection is a very important field of video and image processing, and has a strong research and application value. Motion detection is to separate moving objects from the image containing background, if only rely on a detection algorithm, it is difficult to from a complex natural image sequences to detect moving target. Higher detection accuracy and efficiency are very important, so the study of the fusion of multiple detection methods is becoming more and more important. In this paper, the detection and extraction algorithms of the classical video moving objects in the domestic and foreign literatures are introduced, and the methods are evaluated and summarized. Firstly, the basic knowledge and theory of basic moving target detection is introduced, and then the basic method of target detection is introduced. To provide a reference for the research on the extraction of moving target detection in the future. Keywords: Visual tracking Optical flow method Frame Difference Background modeling method
XXXX大学 《智能机器人》结课论文 移动机器人对运动目标的检测跟踪方法 学院(系): 专业班级: 学生学号: 学生姓名: 成绩:
目录 摘要 (1) 0、引言 (1) 1、运动目标检测方法 (1) 1.1 运动目标图像HSI差值模型 (1) 1.2 运动目标的自适应分割与提取 (2) 2 运动目标的预测跟踪控制 (3) 2.1 运动目标的定位 (3) 2.2 运动目标的运动轨迹估计 (4) 2.3 移动机器人运动控制策略 (6) 3 结束语 (6) 参考文献 (7)
一种移动机器人对运动目标的检测跟踪方法 摘要:从序列图像中有效地自动提取运动目标区域和跟踪运动目标是自主机器人运动控制的研究热点之一。给出了连续图像帧差分和二次帧差分改进的图像HIS 差分模型,采用自适应运动目标区域检测、自适应阴影部分分割和噪声消除算法,对无背景图像条件下自动提取运动目标区域。定义了一些运动目标的特征分析和计算 ,通过特征匹配识别所需跟踪目标的区域。采用 Kalrnan 预报器对运动目标状态的一步预测估计和两步增量式跟踪算法,能快速平滑地实现移动机器人对运动目标的跟踪驱动控制。实验结果表明该方法有效。 关键词:改进的HIS 差分模型;Kahnan 滤波器;增量式跟踪控制策略。 0、引言 运动目标检测和跟踪是机器人研究应用及智能视频监控中的重要关键技术 ,一直是备受关注的研究热点之一。在运动目标检测算法中常用方法有光流场法和图像差分法。由于光流场法的计算量大,不适合于实时性的要求。对背景图像的帧问差分法对环境变化有较强的适应性和运算简单方便的特点,但帧问差分不能提出完整的运动目标,且场景中会出现大量噪声,如光线的强弱、运动目标的阴影等。 为此文中对移动机器人的运动目标检测和跟踪中的一些关键技术进行了研究,通过对传统帧间差分的改进,引入 HSI 差值模型、图像序列的连续差分运算、自适应分割算法、自适应阴影部分分割算法和图像形态学方法消除噪声斑点,在无背景图像条件下自动提取运动 目标区域。采用 Kalman 滤波器对跟踪目标的运动轨迹进行预测,建立移动机器人跟踪运动 目标的两步增量式跟踪控制策略,实现对目标的准确检测和平滑跟踪控制。实验结果表明该算法有效。 1、运动目标检测方法 接近人跟对颜色感知的色调、饱和度和亮度属性 (H ,S ,I )模型更适合于图像识别处理。因此,文中引入改进 型 HSI 帧差模型。 1.1 运动目标图像HSI 差值模型 设移动机器人在某一位置采得的连续三帧图像序列 ()y x k ,f 1-,()y x f k ,,()y x f k ,1+
运动目标图像的识别与跟踪 本文主要目的是将视频摄像头中的运动目标从背景中提取出来,并加以跟踪。首先考虑的是常见的目标检测的算法,其次考虑对于噪声的滤除,最后是对运动目标的跟踪。 一、基本目标检测算法 我们主要考虑的目标检测的算法主要有三种,光流场法、背景模型法以及时域差分法。 1.1光流场法 光流主要是图像亮度模式的表现运动。而光流场则是指灰度模式的表面运动。一般条件下,我们可以根据图像的运动,进行估算相对运动。 光流场法的基本理论是光流场基本方程: 0=++t y x I vI uI (1.1) 式中我们根据亮度守恒,利用泰勒公式展开,忽略高阶项与二次项。其中x I 、y I 和t I 是图像在对数轴x 、y 两个方向和t 的的导数,()v u ,就是这个点的光流坐标。 光流场法的目标检测,在摄像机运动时候也可以做出判断,但是图像的噪声太过明显,使得计算数据庞杂,计算的公式更加复杂,这样并不适合我们的对于目标跟踪的高精度的摄像系统。 1.2背景模型法 背景模型法,也被称为背景差法,主要利用当前的图像和背景的图像的二值化做差,然后取阈值,分割运动目标。 首先根据: ()()()y x b y x f y x D t t t ,,,-= (1.2) 我们可以得到当前的图像帧数()y x f t ,和背景图像的帧数),(y x b t 做差,然后以公式对图像进行二值化的处理。 ???≤>=)(,0)(,1),(BackGround T D ForeGround T D y x P t t t (1.3) 上面),(y x P t 是二值化模板图。假设某一区域大于一个给定的面积的时候,该区域就是我们要找的目标区域。 背景模型法的算法简单,可以快速反应,并且可以提供运动目标的大略特征等数据。但是对于复杂背景下,比如人流较大的公共场所,或者有光照等干扰时,就需以其他的算法以不断更新背景信息来进行弥补。
第38卷第12期电子与信息学报 Vol.38No.12 2016年12月Journal of Electronics & Information Technology Dec. 2016 基于知识的海杂波背景下距离扩展目标检测 许述文*薛健水鹏朗 (西安电子科技大学雷达信号处理国家重点实验室西安 710071) (西安电子科技大学信息感知技术协同创新中心西安 710071) 摘要:该文针对在辅助数据有限的情况下自适应检测器出现检测性能损失,提出基于杂波的先验知识分布的距离扩展目标自适应检测算法。复合高斯杂波的纹理和散斑的协方差矩阵分别被建模为服从逆伽玛分布的随机变量和逆复Wishart分布的随机矩阵。利用先验知识推导了纹理分量的最大后验估计,并结合广义似然比检验设计了不依赖辅助数据的距离扩展目标自适应检测器。仿真结果表明,提出的检测器在参数失配条件下具有好的鲁棒性,而且在辅助数据有限情况下检测性能优于传统的广义似然比检测器的检测性能。 关键词:距离扩展目标;先验知识;复合高斯杂波;逆伽玛分布;逆复Wishart分布 中图分类号:TN957.51 文献标识码:A 文章编号:1009-5896(2016)12-3004-07 DOI: 10.11999/JEIT160905 Adaptive Detection of Range-spread Targets Based on Knowledge in Sea Clutter Background XU Shuwen XUE Jian SHUI Penglang (National Key Laboratory of Radar Signal Processing, Xidian University, Xi’an 710071, China) (Collaborative Innovation Center of Information Sensing and Understanding, Xi’an 710071, China) Abstract: For the problem of detection performance loss of adaptive detectors on the condition that the secondary data are limited, the adaptive detection method of range-spread target based on the prior knowledge of clutter is proposed. The texture and the covariance matrix of speckle of clutter are respectively modeled as the random variable which follows the inverse Gamma distribution and the random matrix which follows the inverse complex Wishart distribution. Based on the prior knowledge, the Maximum A Posteriori (MAP) estimation of texture component is obtained and the adaptive detector of range spread target which does not need the secondary data is designed via utilizing the generalized likelihood ratio test. Finally, the detection performances of the proposed detector are evaluated and the experimental results illustrate that the proposed detector is robust in parameters mismatched situation and outperforms the conventional generalized likelihood ratio test detector for range-spread target in limited secondary data scenarios. Key words: Range-spread target; Prior knowledge; Compound Gaussian clutter; Inverse Gamma distribution; Inverse complex Wishart distribution 1 引言 随着宽带雷达的广泛应用,非高斯杂波背景下距离扩展目标的自适应检测获得了越来越多的关注[1,2]。宽带高分辨雷达(HRR)的分辨单元长度远小 收稿日期:2016-09-07;改回日期:2016-11-09;网络出版:2016-12-02 *通信作者:许述文 swxu@https://www.doczj.com/doc/892455970.html, 基金项目:国家自然科学基金(61201296, 61372136),中央高校基本科研业务费(JB160224),陕西省科协青年人才托举计划(20160205) Foundation Items: The National Natural Science Foundation of China (61201296, 61372136), The Fundamental Research Funds for the Central Universities (JB160224), Young Talent Fund of University Association for Science and Technology in Shaanxi Province (20160205)于目标的尺寸,因此观测目标会占据多个雷达距离单元,此时的目标称为分布式目标或者距离扩展目标。雷达目标检测中,认知杂波的特性是必不可少的并且可以改善检测方法的检测性能。目前,复合高斯模型被广泛地采用建模高分辨雷达下的非高斯杂波[1,3,4]。复合高斯模型采用两个独立的过程描述非高斯杂波:零均值复高斯过程的散斑分量和非负随机过程的纹理分量。文献[5]分析了杂波纹理分量的相干长度,分析结果表明纹理分量在一定的观测时间内可以看作是随机的常数。因此,复合高斯模型退化为了雷达目标检测中经常使用的球不变随机过程(SIRP)模型[6]。近年来,纹理分量为逆伽玛分布 万方数据
视频图像中运动目标检测
毕业论文 题目视频图像中运动目标检测 方法研究 专业电气工程及其自动化 班级电气1003 学生曹文 学号20113024543 指导教师赵哥君 二〇一二年六月八日
摘要 在很多现代化领域,运动目标检测都显示出了其重要的作用。尤其是近二十年的社会经济的飞速发展,运动目标检测都彰显了其重要性,在航空、通信、航海等各个方面都有关键性的作用,从而使运动目标检测方法的研究成为各国的研究热门课题。 通过阅读大量的相关论文、期刊及其网络资源,了解了高斯背景建模及背景更新的基本原理及思想。在本文中,首先介绍了运动目标检测方法的相关基础知识,如图像的二值化、图像的形态学处理、颜色空间模型。然后重点说明了三种常用的运动目标检测方法的研究,简要阐述了三种研究方法的基本思想。在老师的帮助下进行了相应的实验,最终得出了三种运动目标检测方法的优点和缺点,着重探究了高斯背景建模及其背景更新基本原理及思想。 最后,通过相关的程序及软件对混合高斯背景模型进行了相关的实验,进而发现了混合高斯背景建模算法存在的不足之处,如:高斯背景建模的计算量大、运动目标较大时检测效果差等问题,并对对这些问题提出了相关设想及改进。 关键词:运动目标检测;二值化;图像的形态学处理;高斯背景建模;背景更新 I
ABSTRACT In many modern fields, moving target detection are showing its important role. Especially nearly twenty years of rapid development of social economy, the moving target detection has shown its importance, in various aviation, communication, navigation and so on have a key role, so the study of moving target detection method has become a research hot topic in countries. By reading relevant papers, a large number of journals and cyber source, understand the basic principle and thought of Gauss background modeling and updating the background. In this paper, firstly introduces the basic knowledge of moving target detection method, such as the two values image, morphological image processing, color space model. Then focus on the study of three methods used for moving object detection, a brief description of the basic ideas of the three kinds of research methods. By the experiment, the results of three kinds of method of moving target detection has advantages and disadvantages, this paper emphatically explores Gauss background modeling and background updating basic principle and thought. Finally, through the program and software related to mixed Gauss background model for the relevant experiments, and found the shortcomings, the presence of mixed Gauss background modeling algorithm such as: the problem of computing Gauss background modeling, moving target volume larger detection effect is poor, and on these problems put forward relevant ideas and improvement. Keywords: moving object detection; two values; I I
本科毕业论文
(科研训练,毕业设计)
题
目: opencv 的运动目标检测
姓 学
名:汤超 院:信息科学与技术学院 系:电子工程系
专 年 学
业:电子信息工程 级:2005 号:22220055204057 职称:教授
指导教师(校内) :杨涛
2009 年
5 月
25 日
厦门大学电子工程系 2005 级本科毕业论文 -
基于 opencv 的运动目标检测和跟踪
摘要
Opencv(Open Source Computer Vision Library)是一种用于数字图像处理和计算机视 觉的函数库,由 Intel 微处理器研究实验室(Intel's MicroprocessorResearch Lab)的视 觉交互组(The Visual Interaetivity Group)开发.采用的开发语言是 C++,可以在 window: 系统及 Linux 系统下使用,该函数库是开放源代码的,能够从 Intel 公司的网站免费下载 得到.opencv 提供了针对各种形式的图像和视频源文件(如:bitmap 图像,video 文件和实 时摄像机)的帧提取函数和很多标准的图像处理算法,这些函数都可以直接用在具体的视频 程序开发项目中. 针对在背景中检测出运动目标并实施警戒等特定提示,本文利用 opencv 的运动物体 检测的数据结构,函数以及基本框架,建立了一个由人机交互界面模式.实施对物体的检 测.该方面在安防方面已经很受重视.相信在不久的将来将会成为一种监督秩序的方式.
关键字 视频,运动目标检测,帧差分
运动目标检测研究意义及国内外现状 1研究意义 (1) 2国内外研究现状 (1) 1研究意义 众所周知,当前是信息时代,信息的获得、加工、处理以及应用都有了飞跃发展。人们认识世界的重要知识来源就是图像信息,在很多场合,图像所传送的信息比其他形式的信息更丰富、真切和具体。人眼与大脑的协作使得人们可以获取、处理以及理解视觉信息,人类利用视觉感知外界环境信息的效率很高。事实上,据一些国外学者所做的统计,人类所获得外界信息有80%左右是来自眼睛摄取的图像。由此可见,视觉作为人类获取外界信息的主要载体,计算机要实现智能化,就必须能够处理图像信息。尤其是近年来,以图形、图像、视频等大容量为特征的图像数据处理广泛应用于医学、交通、工业自动化等领域。 自然界的一切图像都是连续变化的模拟图像,在日常生活中,这些图像中的运动目标往往是我们比较关心的,如:行人、行驶的交通工具以及其他的运动物体。运动目标检测是计算机视觉和数字图像处理的一个热门方向,广泛应用于机器人导航、智能视频监控、工业检测、航空航天等诸多领域。因此,运动目标检测也就成为了近年来理论和应用的研究热点,它是图像处理和计算机视觉学科的重要分支,也是智能监控系统的核心部分。它的目的就是如何快速、准确地检测出监控视频中的运动目标,即从序列图像中将运动目标提取出来。 随着社会经济的不断发展,城市化步伐的不断加速,城市的工作、生活秩序显得越来越紊乱,实时的人数统计有着重要意义。如:可以通过统计等候电梯的人数来优化调度电梯,以此提高电梯的利用率,减少用户的等待时间。可以通过统计经过十字路口、丁字路口人群流动繁忙的交通场合的人数,可以合理安排交通警察或保安人员的工作时间和工作额度。 2国内外研究现状 计算机视觉是指用计算机实现人的视觉功能,它的研究目标就是使计算机具有用过一幅或多幅图像认知周围环境的能力(包括对客观世界三维环境的感知、识别与理解)。运动目标检测作为计算机视觉技术的一个分支,就是对视场内的运动目标,如人或交通工具,进行实时的观测,并将其分类,然后分析他们的行为。目前,国际上许多高校和研究所,如麻省理工学学院、牛津大学等都专门设立了针对运动目标检测的研究组或者研究实验室。美英等国家已经研究了大量的相关项目。一些著名公司和研究机构,如IBM、Microsoft、麻省理工学院等近几年来投入了大量的人力物力来进行智能监控系统的研究,部分成果已经转化为产品投入了市场。 目前在国内的研究机构中,中国科学院北京自动化研究所下属的模式识别国家重点实验
运动检测(移动侦测)原理 一、引言 随着技术的飞速发展,人们对闭路电视监控系统的要求越来越高,智能化在监控领域也得到越来越多的应用。在某些监控的场所对安全性要求比较高,需要对运动的物体进行及时的检测和跟踪,因此我们需要一些精确的图像检测技术来提供自动报警和目标检测。运动检测作为在安防智能化应用最早的领域,它的技术发展和应用前景都受到关注。 运动检测是指在指定区域能识别图像的变化,检测运动物体的存在并避免由光线变化带来的干扰。但是如何从实时的序列图像中将变化区域从背景图像中提取出来,还要考虑运动区域的有效分割对于目标分类、跟踪等后期处理是非常重要的,因为以后的处理过程仅仅考虑图像中对应于运动区域的像素。然而,由于背景图像的动态变化,如天气、光照、影子及混乱干扰等的影响,使得运动检测成为一项相当困难的工作。 二、运动检测(移动侦测)原理 早期的运动检测如MPEG1是对编码后产生的I帧进行比较分析,通过视频帧的比较来检测图像变化是一种可行的途径。原理如下:MPEG1视频流由三类编码帧组成,它们分别是:关键帧(I 帧),预测帧(P帧)和内插双向帧(B帧)。I帧按JPEG标准编码,独立于其他编码帧,它是MPEG1视频流中唯一可存取的帧,每12帧出现一次。截取连续的I帧,经过解码运算,以帧为单位连续存放在内存的缓冲区中,再利用函数在缓冲区中将连续的两帧转化为位图形式,存放在另外的内存空间以作比较之用,至
于比较的方法有多种。此方法是对编码后的数据进行处理,而目前的MPEG1/MPEG4编码都是有损压缩,对比原有的图像肯定存在误报和不准确的现象。 目前几种常用的方法: 1.背景减除(Background Subtraction ) 背景减除方法是目前运动检测中最常用的一种方法,它是利用当前图像与背景图像的差分来检测出运动区域的一种技术。它一般能够提供最完全的特征数据,但对于动态场景的变化,如光照和外来无关事件的干扰等特别敏感。最简单的背景模型是时间平均图像,大部分的研究人员目前都致力于开发不同的背景模型,以期减少动态场景变化对于运动分割的影响。 2.时间差分(Temporal Difference ) 时间差分(又称相邻帧差)方法是在连续的图像序列中两个或三个相邻帧间采用基于像素的时间差分并且阈值化来提取出图像中的运动区域。时间差分运动检测方法对于动态环境具有较强的自适应性,但一般不能完全提取出所有相关的特征像素点,在运动实体内部容易产生空洞现象。 3.光流(Optical Flow) 基于光流方法的运动检测采用了运动目标随时间变化的光流特性,如Meyer[2] 等通过计算位移向量光流场来初始化基于轮廓的跟踪算法,从而有效地提取和跟踪运动目标。该方法的优点是在摄像机运动存在的前提下也能检测出独立的运动目标。然而,
——人形目标检测与跟踪
一、 本组研究方案,算法系统框图 二、 检测算法、原理、程序实现方法、调试过程 【视频处理】 老师提供的两端视频两段视频并不能直接用来输入OpenCV 所编程序处理,需要将其转化为无压缩的avi 格式。利用软件WinAVI Video Converter ,转换为ZJMedia uncompressed RGB24格式。 【背景建模】 我们小组利用N 帧图像的平均来求取背景,并实时对背景进行更新。由于考虑到ExhibitionHall.avi 视频中运动物体所占场景比例少,运动轨迹为直线,为了处理的简单,所以在这不刻意区分物体和背景像素点。即(1)(1)()()A A A B k B k I k αα+=-+ ,这里的α 很小(0.003) 。 【前景提取】 灰度图像的处理比彩色图像的处理过程简单。我们小组将读入的彩色图像变成灰度图像,并二值化;同样,背景也进行二值化。两者做差值,得到一些离散的黑白点块。也就
是要识别的目标。但是,这样得到的块是分散开的,程序 整的人形被分块识别成多个目标。为此,我们做了一些简 单的后处理。先腐蚀元素,去除不必要的杂点,然后进行 膨胀块处理,自定义块的大小,使其膨胀成能被识别成一 个人形的目标。另外,我们还做个简单的高斯低通滤波, 是得到的结果光滑些。其流程图如右。 【目标检测】 根据前景处理的结果,得到一些连续的块目标。利用帧间差,可以提取出目标的轮廓。根 据轮廓的位置分布,计算出检测目标的形心和大小。并予以标记。 【目标跟踪】 根据目标帧间的位移差值,可以计算出运动目标在x,y方向上的运动速度。可以利用这 个关系判断下一帧目标的位置。设置一个合适的阈值,就可以实现目标的跟踪。在此,我们还 引入了重叠判断机制。如果目标重叠,即通过遍历,发现块重叠大于一定阈值后,根据前面得 到的位置预测判断当前物块位置;如果不重叠,则遍历这幅图像中的所有物块,寻找临近最优 物块,以保持编号连续性。在目标跟踪过程中,还进行了Kalman滤波,对目标轨迹进行滤波 处理。
基于VC的运动图像跟踪算法设计 学院自动化学院 专业 班级 学号 姓名 指导教师 负责教师 沈阳航空航天大学 2013年6月
沈阳航空航天大学毕业设计(论文) 摘要 运动目标检测与跟踪作为计算机视觉领域的一个重要分支与基础,在工业、医疗保健、航空航天、军事等各个领域具有广泛的应用前景,一直受到广泛的关注,并成为计算机视觉领域的一个研究热点。但是由于运动目标检测问题本身的复杂性,运动目标的检测与跟踪依然面临着诸多挑战。本文在现有研究成果的基础上,对静态场景下的运动目标检测跟踪进行了深入的讨论。 本文首先对运动目标检测的基本方法----帧间差分法与背景差分法进行了深入的学习和探讨,然后,借助于OpenCV技术,在Visual C++ 6.0编程环境下开发了运动目标检测跟踪系统。该系统首先对采集的视频图像序列进行相关的预处理之后,将视频图像序列中的运动目标比较可靠地检测出来。通过系统的测试结果和数据可以得出结论:本文基于OpenCV设计的运动目标检测跟踪系统具有良好的实时性,能够正确地进行运动目标的实时检测与跟踪。 关键词:运动目标检测;帧间差分法;视频图像;OpenCV
基于VC的运动图像跟踪算法设计 Algorithm Design of Image Motion Tracking Based on VC Abstract Moving target detection and tracking field of computer vision as an important branch of the foundation, in the industrial, healthcare, aerospace, military and other fields with a wide range of applications, has been widespread concern, and the field of computer vision to become a research hotspot. However, due to moving target detection complexity of the problem itself, moving target detection and tracking is still facing many challenges. In this paper, based on the results of existing research in static scenes of the moving target detection and tracking in-depth discussion. This article first basic method of moving target detection - frame difference method and background subtraction method conducted in-depth study and discussion, and then, by means of OpenCV technology, Visual C 6.0 programming environment developed a moving target detection and tracking system. The system and the collection of the associated video sequence after pretreatment, the video image of the moving target sequence comparison reliably detected. Through systematic test results and data can be concluded: Based on OpenCV design moving target detection and tracking system has good real-time, be able to properly carry out real-time moving target detection and tracking. Keywords: moving target detection; frame difference method; video frame; OpenCV