预设
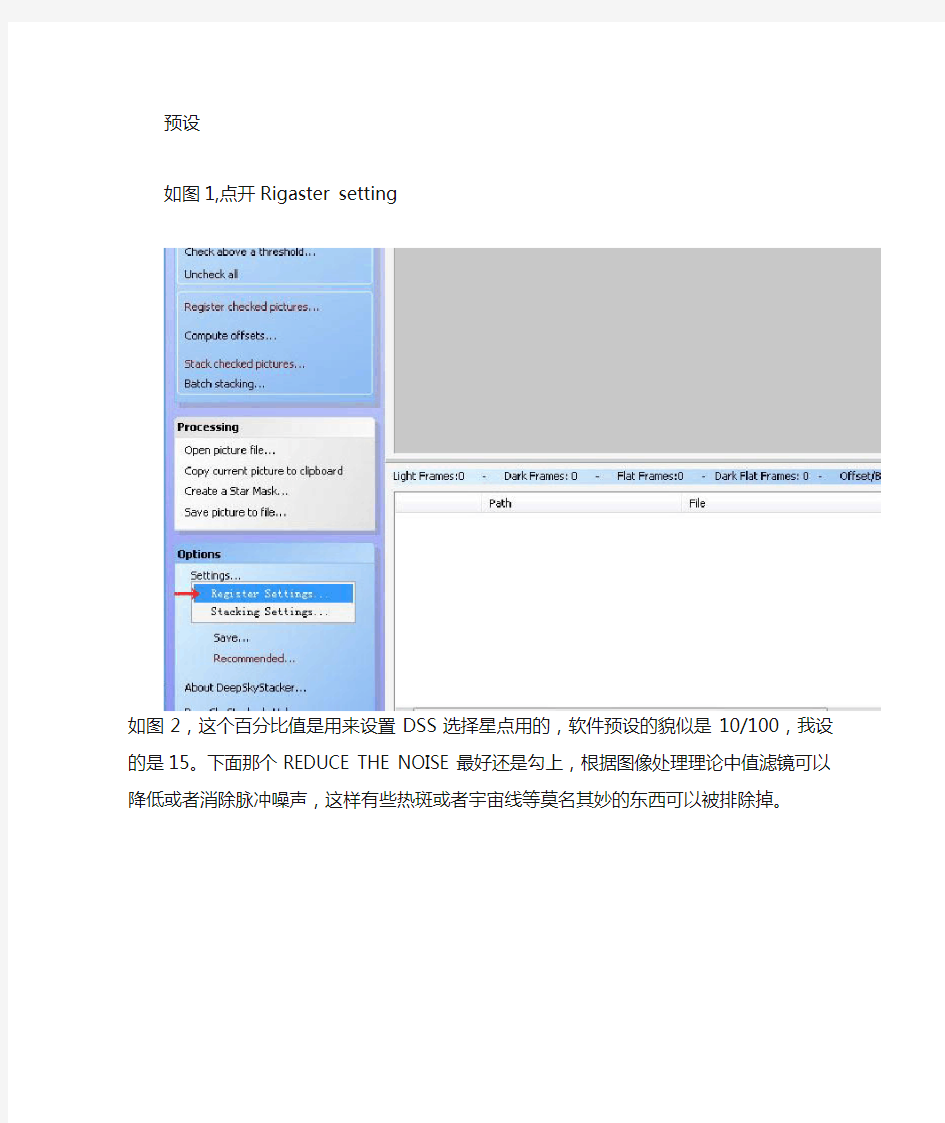
如图1,点开Rigaster setting
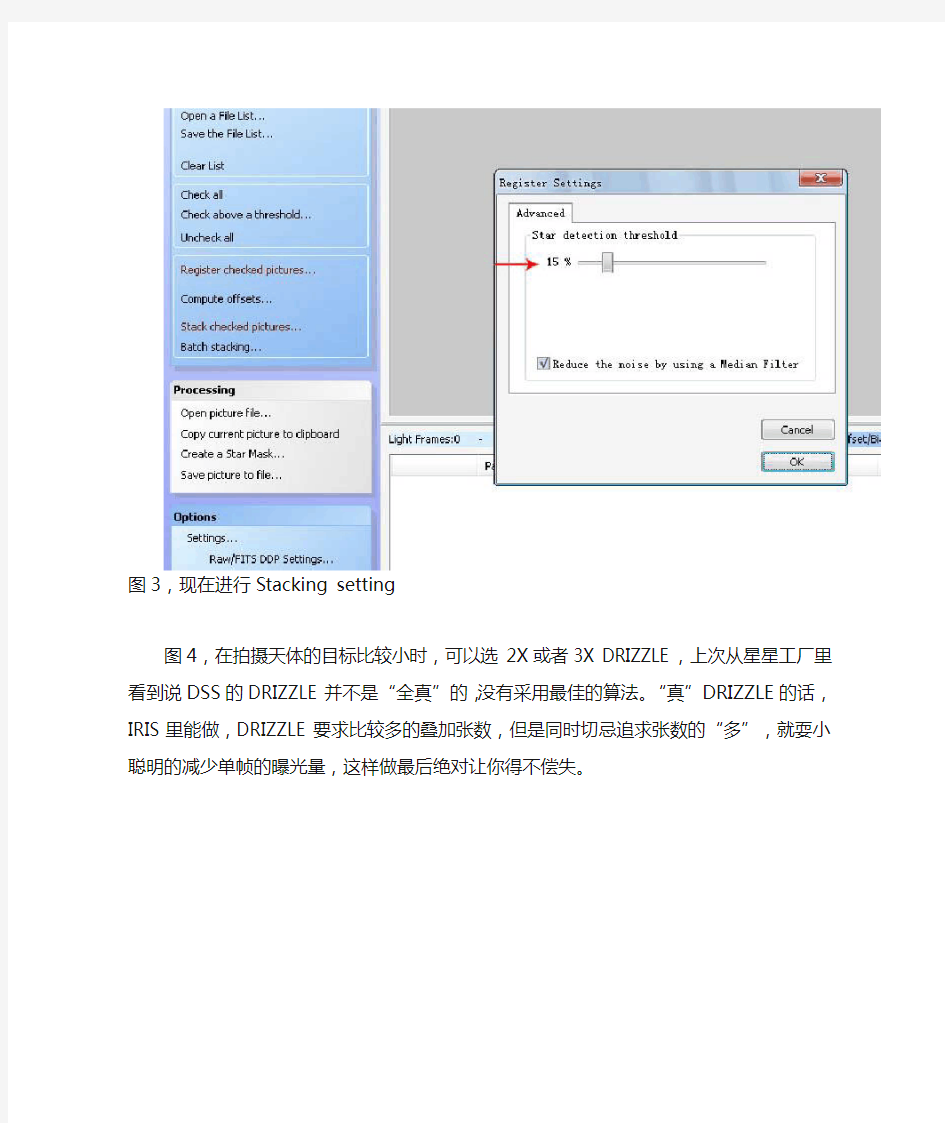
如图2,这个百分比值是用来设置DSS选择星点用的,软件预设的貌似是10/100,我设的是15。下面那个REDUCE THE NOISE最好还是勾上,根据图像处理理论中值滤镜可以降低或者消除脉冲噪声,这样有些热斑或者宇宙线等莫名其妙的东西可以被排除掉。
图3,现在进行Stacking setting
图4,在拍摄天体的目标比较小时,可以选2X或者3X DRIZZLE,上次从星星工厂里看到说DSS的DRIZZLE并不是“全真”的,没有采用最佳的算法。“真”DRIZZLE的话,IRIS里能做,DRIZZLE 要求比较多的叠加张数,但是同时切忌追求张数的“多”,就耍小聪明的减少单帧的曝光量,这样做最后绝对让你得不偿失。
图5,先看RAW部分的。
常规使用的时候选择BINLINEAR INTERPOL就行了,这个就是双线性插值,将RGGB像素的单色合成彩色。第4个就是有时也会用的BIN 2,通常如果你感觉照片曝光不足或者星云非常的暗,或者星点变形有些厉害了,为了总体能获得好些的信噪比或者星点的“起码还能看看”还是选第4个2X2BIN。
图六,勾了这个“M ORORCHROME 16BIT FITS。。。。。。”的话,QHY8的FITS就可以在DSS里处理了,对于有些看了MAXIM DL感觉烦的人到也不是坏事。我试下来Q8选佳能的单反最后色彩转换的效果不错,NIKON的颜色偏冷,估计与第1行第1列的那个像素是蓝颜色的有关系吧(CANON的如图上是红色的)。色彩转换算法一样选BINLINEAR。
OK,PART ONE 到此结束。
第1部分--处理前预设
应该放进去叠加的图片只有3种情况,其他情况的还是别叠了效果不会好的。
第1种情况,CRW,CR2或者NEF格式的数码单反的RAW文件,DSS直接处理RAW文件的功能确实挺方便。
第2种情况,CCD拍摄的FITS格式文件。
第3种情况,RAW或者FITS经过线性转换格式后的“无损压缩的16位TIF文件”
看图1,划线的那些字就是打开亮帧了
什么是亮帧?
你拍的天体就叫亮帧了。
图2,打开暗场
暗场注意,
第1曝光时的ISO值一定要和亮帧相同。
第2,曝光的时间长度必须与亮帧相同。
第3,曝光时的温度要尽量恒定,单反的话为了避免温度变化导致暗场挂掉,可以在拍摄前,拍摄中间和拍摄结束后分别做个1,2张暗场最后放进去叠加。
例:要拍摄2小时的M31。
解:拍摄前先打开单反电源让它工作半小时使之达到相对恒定的工作温度,然后拍摄1-2张暗场。在拍摄M31累计曝光1小时后停下来再做1-2张暗场。在M31的2小时曝光都结束后再做1-2张暗场。
冷冻CCD就不用那么烦了。抗温变的能力比单反好。可以1晚上就用1组暗场。等所有的亮帧曝完了拍也来得及。
记着,很少有人用1张暗场,暗场是要成“组”用的,最后的总暗场叫“MASTER DARK”。我一般拍6张(单反)或者4张(冷冻CCD)。
图3,打开平场
数码单反怎么拍摄平场?《星野摄影》上讲的很明白了,对着均匀光源,置于M档,ISO可以低于亮帧1-2档,然后看测光表的读数,看见读数后再加1到2档曝光即可,有人会问,那不会过曝光么?答案是否,因为DSS在处理时所有文件都是线性的,平场的动态范围还没那么大(如果大的都能跨越4096个亮度级,那支没前途的镜筒还是扔了算了),在色阶的分布图上越往右曝光越充分,平场里包含的噪声就越低,所以要加曝。
如何制造均匀光源?
1。天文晨光于民用晨光交界那段时间时距离太阳隔180度处附近。
2。镜头前蒙个什么白色餐桌布折个几层再拉平,然后用皮筋绑在镜头前。光源可以选择直接对着日光灯,或者白天对着室外天空远离太阳和光线剧烈变化处。
平场拍几张?
我上次拍了8张。
PS.
1 --FLAT下面还有个DARK FLAT(暗平场),这个东西的拍法和暗场一样把镜头盖关了,但是曝光时间和ISO要设成和平场一致才行。
2。拍平场时请保持在拍摄亮帧时的焦距,和光圈,2者改变任何变1个都可能挂掉----焦距偏离无穷稍许问题还不大,要是把光圈换了就肯定死翘翘了。
图4,导入偏置帧
偏置怎么拍?
我的拍法是ISO设置和亮帧相同,然后把镜头盖盖了以1/4000秒的最高快门拍1张,偏置噪声又叫0曝光噪声,只要CCD被加了电压就始终存在的。
图5,选定所有的文件。
图6,RIGASTER吧。
那个Select /100 pictures and stack的东西,如果你想让每张都叠进去那就填100/100。我事先都是自己手工选好要叠的帧,那些拉线的和不好的事先直接扔进回收站了。
设完后点OK。
图7,SAVE,保存文件看看简单,但是这个地方很多人出问题了。
图8
一定要按照这张图上箭头处的设置才行,这样最后保存下来的TIF才会是16位的线性文件,这样的文件才能送进PS里去压缩。
如果你不保存,DSS自动保存的那个AUTOSAVE是32BIT的TIF,至少我的电脑打不开。背景上的那张噪点一片的图片是给你预览的,DSS对图像的压缩不会作用在最终存储的图像上。图上这张暗幽幽的照片最终才能去处理,才是正点的照片。
图9
如果你选了OPRTION里面的第1个那就完蛋了,最后存的TIF(箭头所指的截图)会和给你预览的那张一样亮。为什么很亮?因为下面DSS自己带的那个色阶等等调整将全部被应用在保存的图像里,等于你把照片都压缩完了,接下来能再处理的弹性很小很小,而且DSS的这些压缩功能当然不如PS的方便。
OK,现在出来的照片能真正被处理了。
下面是M42的处理实例
发现自己的RAW文件库里已经没有叠好的TIF格式,懒的叠自己的照片,于是借用++0的一组已经叠好的TIF
一共是2种方法,先色阶后曲线,还有先曲线后色阶。也可以曲线和色阶交替使用并且使用的强度也和这张M42不同,这个多数用于处理很弥散的星云,人的因素比较重要但。M42大家拍的比较多所以这样处理多少有些典型的意义。不管是M42,还是其他更加暗淡的星云。
在将线性文件(俗称的原图,这是真正的原图,相机直接出来的JPG,佳能DPP软件里没有把反差选项勾成“线性”的,PHOTOSHOP的RAW插件出来的照片,都不能称为“原片”,因为这些图像已经被压缩过有用信息----或许软件在自动处理时会认为“无用”,并且经过GAMA 校正了)进行压缩的时候,要注意RGB的任何通道都不要将星云的信息压缩到“饱和”,即色彩值变成到0或者255,在达到或者相当接近这2个值时,再想把这部分信息还原到人眼能明显感受到的区域不是不可能就是相当困难。
刚叠出来的TIF文件,之前经过的处理遵循这个公式。
Raw image:亮帧。可以是线性转档后的TIF文件,也可以是直接的CR2,NEF,CRW等格式的文件,也会是冷冻CCD输出的FITS格式文件。
Dark:暗场。
Flat:平场。
Offset map/BIAS:偏置。
分子上的DARK是针对RAW的MASTER DARK,即1。曝光时间/温度与星云RAW文件一致2。之前已经减过BIAS了。因为RAW文件中间依然含有BIAS,因此分子上要补减BIAS 3。是1张或多张暗场叠加过的。
分母上的DARK,也是一张MASTER DARK,与分子上的不同点在,这张MASTER DARK的曝光时间和温度要与平场相同。
如果纯粹为了方便理解,下面图中这个公式可写成这样:
Processed image= light frame-相同时间的dark farme(该暗帧是拍摄的单张暗帧直接叠加的,且时间/温度与LIGHT一致)/ flat Frmae-相同时间的dark frame(该暗帧是拍摄的单张暗帧直接叠加的,且曝光时间/温度与FLAT一致),在这个公式里,BIAS是不用减的,因为亮帧和暗场及平场里都包含BIAS,在这个公式里一次减完。
一、初步对背景色彩进行修正。
分析上图。星空的背景应当是中性的灰色,因此在远离云气主体处取1参考点。从箭头看出,背景上红色明显的偏重。故打开色阶进行下面操作。分3色通道同时拉动3,4号箭头可以使色阶上的信息进行平移而不是被压缩,注意2者要配合,如果加大3的值,则4的值要相应减小。最后处理到RGB色值相同。
再次分析这张照片,星云亮度因为曝光过渡已经不可避免的陷于饱和,由于M42的亮度变化极大,而我们现在需要抽取星云暗部的云气,因此选择移动色阶上中间的箭头来压缩图像的暗部。为了避免一次下手过重最好循序渐进,我采取了相同的值连做了4次。下图是做完第1次的结果.
连续压缩4次的结果。
移动最左边的箭头将图像信息展开。注意处理时在红线处留一点余量方便今后的处理。
星云中心的亮度过渡相对周围还是很剧烈,所以再做1次曲线。
最后再将最暗部的冗余信息压去。云气抽取完毕。
第2种办法是以曲线为主。
原则就是在压缩图像使星云变的明显时,曲线要保持比较好的连续性。
航空摄影测量 航空摄影测量指的是在飞机上用航摄仪器对地面连续摄取像片,结合地面控制点测量、调绘和立体测绘等步骤,绘制出地形图的作业。 原理:单张像片测图的基本原理是中心投影的透视变换,而摄影过程的几何反 转则是立体测图的基本原理。广义来说,前一情况的基本原理也是摄影过程的几何反转。摄影过程的几何反转都是应用各种结构复杂的光学机械的精密仪器及数学解析的方式来实现的。 理论:航空摄影测量的主题,是将地面的中心投影(航摄像片)变换为正射投 影(地形图)。这一问题可以采取许多途径来解决。如图解法、光学机械法(亦称模拟法)和解析法等。在每一种方法中还可细分出许多具体方法,而每种具体方法又有其特有的理论。其中有些概念和理论是基础性的,带有某些共性,如像片的内方位元素和外方位元素,像点同地面点的坐标关系式,共线条件方程,像对的相对定向,模型的绝对定向和立体观测原理等。 作业:航空摄影测量需要进行外业和内业两方面的工作。 航测外业工作包括:①像片控制点联测。像片控制点一般是航摄前在地面上布设的标志点,也可选用像片上的明显地物点(如道路交叉点等),用普通测量方法测定其平面坐标和高程。②像片调绘。是图像判读、调查和绘注等工作的总称。在像片上通过判读,用规定的地形图符号绘注地物、地貌等要素;测绘没有影像的和新增的重要地物;注记通过调查所得的地名等。通过像片调绘所得到的像片称为调绘片。调绘工作可分为室内的、野外的和两者相结合的3种方法。③综合法测图。主要是在单张像片或像片图上用平板仪测绘等高线。 航测内业工作包括:①测图控制点的加密。以前对于平坦地区一般采用辐射三角测量法,对于丘陵地和山地则采用立体测图仪建立单航线模拟的空中三角 网,进行控制点的加密工作。20世纪60年代以来,模拟法空中三角测量逐渐地被解析空中三角测量代替。②用各种光学机械仪器测制地形原图。 测量方法:航空摄影测量的测图方法主要有3种,即综合法、全能法和分工法(或 称微分法) 航空摄影测量的综合法是摄影测量和平板仪测量相结合的测图方法。地形图上地物、地貌的平面位置由像片纠正的方法得出像片图或线划图,地形点高程和等高线则用普通测量方法在野外测定。它适用于平坦地区的大比例尺测图。 航空摄影测量的全能法是根据摄影过程的几何反转原理,置立体像对于立体
1、航空摄影技术规范 (1)《全球定位系统(GPS)辅助航空摄影技术规定》 (2)GB/T 18314-2009《全球定位系统(GPS)测量规范》 (3)全球定位系统实时动态测量(RTK)技术规范》(CH/T2009-2010)(4)《国家基础航空摄影补充技术规定》 (5)GB 12898-2009《国家三、四等水准测量规范》 (6)GB/T 19294-2003《航空摄影技术设计规范》 (7)《低空数字航空摄影规范》(CH/Z3005-2010) (8)《低空数字航空摄影测量外业规范》(CH/Z3004-2010) (9)MH/T 1005-1996《摄影测量航空摄影仪技术要求》,中国民用航空总局(10)MH/T 1006-1996《航空摄影仪检测规范》,中国民用航空总局 (11)GB/T 16176-1996《航空摄影产品的注记与包装》 (12)《国家基础航空摄影补充技术规定》,国家测绘局 (13)GB 15967-1995《1∶500、1∶1000、1∶2000地形图航空摄影测量数字化测图规范》 (14)GB/T 6962-2005《1∶500、1∶1000、1∶2000地形图航空摄影规范》(15)GB 7931-2008《1∶500、1∶1000、1∶2000地形图航空摄影测量外业规范》 (16)GB 7930-2008《1∶500、1∶1000、1∶2000地形图航空摄影测量内业规范》 (17)GB/T 20257.1-2007《1∶500、1∶1000、1∶2000地形图图式》 (18)GB 14804-93《1∶500、1∶1000、1∶2000地形图要素分类与代码》(19)GB/T23236-2009《数字航空摄影测量空中三角测量规范》 (20)GB/T 18326-2001《数字测绘产品检查验收规定和质量评定》 (21)CH 1002-1995《测绘产品检查验收规定》 (22)CH 1003-1995《测绘产品质量评定标准》 (23)国测国字【1997】20《测绘生产质量管理规定》 (24)GB/T 18316-2008《数字测绘成果质量检查与验收》 (25)GB/T24356-2009《测绘成果质量检查与验收》
1 前言 1.1主要工作内容 (1)获取增城市市域范围内约1650平方公里真彩数码航片。 (2)沿增从高速、北三环高速和广河高速公路测绘面积约216平方公里1:2000数字线划图(DLG)。 (3)中心城区62平方公里1:2000数字线划图(DLG)修测。 (4)广汕路以北第一期测绘302平方公里1:2000数字线划图(DLG)。 (5)广汕路以北第二期测绘498平方公里1:2000数字线划图(DLG)。 (6)广汕路以南650平方公里数字正射影像图(DOM)生产。 1.2 技术依据 表1 技术依据
1.3 测区概况 增城市地理位置十分优越。位于珠江三角洲东北部。因地处连接香港、深圳、广州三个大都市的中部,被称之为“黄金走廊”。 全市地形北高南低,北部山地面积约占全市面积的8.3%;丘陵主要分布在中部,约占全市面积的35.1%,低丘和台地集中在中南部,约占全市面积的23.2%;南部是广阔而典型的三角洲平原,加上河谷平原,约占全市面积的33.4%。航摄范围以行政境界为基础采用满图幅方式进行外扩设计。 1.4 气候状况 增城市气候温和,土地肥沃,风调雨顺,全年平均气温为22.2度,年降雨量1869mm。 4~9月为雨季,占年降雨量的85%,10~3月为干季,占雨量的15%。受地形影响,降雨量北多南少;北部正果最多年降雨量3049.1mm,南部石滩最少年降雨量只有877mm。夏季常有台风侵入,年平均2次,最多年达7次,也有无台风的年份,风力最大可达11级,对南部地区影响较大。
图1 增城市航摄范围示意图1.5 飞行平台、航摄仪及摄影基地 飞行平台:运5 航摄仪:SWDC-4 机场:广州白云机场
4D产品、航空摄影测量知识点 航摄准备:摄区基本情况分析、确定航摄设计用图、航摄空域申请、《航空摄影技术设计书》航摄设计:摄影比例尺的确定、 航摄分区的划分(a)分区界线应与图廓线相一致;b)分区内的地形高差不得大于四分之一航高(以分区的平均高度平面为基准面的航高)。c)在地形高差许可且能够确保航线的直线性的情况下,航摄分区的跨度应尽量划大,同时分区划分还应考虑用户提出的加密方法和布点方案的要求;e)当地面高差突变,地形特征差别显著或有特殊要求时,可以破图幅划分航摄分区。)、基准面高度的确定、航线的敷设、航摄基本参数的计算、航摄季节和时间的选择、航摄仪的选择与检定、航摄胶片的选择与测定; 空中摄影:设备的检测发、航摄试片、航空摄影、填写飞行日志; 摄影处理:配置冲洗药液、胶片冲洗、像片印制; 质量检查:像片重叠度、像片倾斜角、像片旋偏角、航线弯曲度、摄站航高差、航摄漏洞、航线偏差、影像质量; 成果提交: 1)航摄分区略图 2)航片索引图 3)航摄底片、像片 4)航摄仪检定表 5)航摄底片压平质量检测数据表6)航摄底片密度抽样测定数据表7)航摄飞行报告 8)附属仪器记录数据9)成果质量检查报告10)技术总结 11)航摄资料移交书12)合同规定的其他资料 摄影测量的主要任务之一:把地面按中心投影规律获取的摄影比例尺航摄像片转换成以测图比例尺表示的正射投影地形图
解析空中三角测量案例 空中三角测量的精度指标主要指定向误差和控制点残差:框标坐标残差绝对值一般不大于0.010mm,最大不超过0.015mm。扫描数字化航摄影像连接点上下视差中误差为 0.01mm(1/2像素),数码航摄仪获取的影像连接点上下视差中误差为1/3像素。 1、资料准备:像片索引图、数字/数字化航摄影像、航摄仪检定书、飞行记录资料、 区内现有小比例尺地形图、区域网像控点刺点片、区域网像控点联测成果。 2、像控点的转刺:航摄像片上平面点和平高点的刺孔偏离误差,不得大于像片上的0.1 毫米,高程点如选在明显目标点上,则要求相同,像控点的刺孔要小,刺孔直径最大不得超过0. 2毫米 3、像控点的选点观测:像片控制点的一般应满足下列条件: a)像片控制点的目标影像应清晰,易于判读;目标条件与其他像片条件矛盾时应着 重考虑目标条件;b)布设的控制点应能公用;c)控制点距像片边缘不应小于1cm (18cm X 18cm像幅)或1. 5cm (23cm X23cm),综合法成图的控制点距航向边缘不应小于上述规定的1/2;d控制点距像片的各类标志应大于1mm; 4、定向:定向点残余上下视差、同一航带模型连接差。 5、网平差计算:平差计算、精度检查 6、分区接边:同比例尺、同地形类别、同比例尺、不同地形类别、不同比例尺 7、检查:像控点成果使用正确性检查、航摄仪检定参数与航摄参数、各项平差计算 的精度、提交成果的完整性 8、整理与提交:起算数据文件、像点坐标原始观测值文件、平差结果文件、影像外 方位元素文件、精度评定文件、测区加密分区图、区域网略图、成果检查与技术总结报告。
合同编号: 技术开发(委托)合同项目名称:郑州市航空港区数字航空摄影与1:1000数 字正射影像地图制作 委托方(甲方):郑州航空港区管理委员会 受托方(乙方):中煤地(西安)视讯科技有限公司 签订时间: 2014年 4月25日 签订地点:郑州市 中华人民共和国科学技术部印制
填写说明 一、本合同为中华人民共和国科学技术部印制的技术开发(委托)合同示范文本,各技术合同登记机构可推介技术合同当事人参照使用。 二、本合同书适用于一方当事人委托另一方当事人进行新技术、新产品、新工艺、新材料或者新品种及其系统的研究开发所订立的技术开发合同。 三、签约一方为多个当事人的,可按各自在合同关系中的作用等,在“委托方”、“受托方”项下(增页)分别排列为共同委托人或共同受托人。 四、本合同书未尽事项,可由当事人附页另行约定,并可作为本合同的组成部分。 五、当事人使用本合同书时约定无需填写的条款,应在该条款处注明“无”等字样。
本合同为郑州航空港区管理委员会(下简称甲方)委托受托方中煤地(西安)视讯科技有限公司(下简称乙方),进行郑州航空港区数字航空摄影与1:1000数字正射影像地图制作开发工作,并支付相关费用。双方经过平等协商,在真实、充分表达各自意愿的基础上,根据《中华人民共和国合同法》、《中华人民共和国测绘法》和有关法律法规的规定,本着平等自愿和诚实信用的原则,一致同意签订如下合同: 第一条:测绘范围 按甲方提供的摄区范围,面积约398.6平方公里。 摄区边界个拐点坐标及指定区域的植被调查范围图纸附后。 第二条:测绘内容及要求 1. 摄影面积:约398.6平方公里 2. 测绘内容: (1)真彩色航空摄影约398.6平方公里 (2)1:1000正射影像图制作约398.6平方公里 (3)植被范围调查 35平方公里 3. 技术要求: (1)航空摄影
《航空摄影测量学》 课程设计 学校:华东交通大学 班级:12级测绘(2)班2015年6月9日
目录 目录 (2) 第一章:课设准备工作 (3) 1.课设目的 (3) 2.课设的要求 (3) 3.课设中的精度要求 (3) 4.课设内容和原理 (4) 第二章:MapMatrix课设操作步骤 (7) 1.新建工程以及添加测区参数和影像 (7) 2.内定向 (13) 3.相对定向 (15) 3.绝对定向 (20) 4.核线、匹配采样 (22) 5.生成DEM (25) 6.创建DOM (29) 第三章:VirtuoZo课设操作步骤 (32) 1.启动VirtuoZo (32) 2.建立测区 (32) 3.创建相机参数及外控点文件 (33) 4.引入影像 (35) 5.创建模型 (37) 6.模型定向 (40) 7.量测控制点 (44) 8.绝对定向计算 (45) 9.定义核线范围 (47) 10.生成核线影像 (48) 11.DEM生产 (49) 12.DOM生产 (57) 13.DLG生产 (65) 第四章:课设感想 (69)
第一章:课设准备工作 1.课设目的 (1)巩固这两个学期对《摄影测量学》和《数字摄影测量学》知识,进一步加深对摄影测量中内定向、相对定向、绝对定向、测标测图、生成、编辑DEM(数字高程模型)等方法的综合运用。 (2)通过该实习,使学生掌握摄影测量最基本原理及用摄影测量手段进行测量的方法和步骤,熟悉数字摄影测量工作站应用软件,在“数字摄影测量工作站”网络版上练习内定向,相对定向、绝对定向、高程点和地物的测绘。 (3)加深对所学理论知识的理解,提高在摄影测量工作中的分析问题和解决问题的能力。 2.课设的要求 (1)正确引入数字影像、相机参数及控制点文件。 (2)进行内定向、相对定向、绝对定向并满足《规范》的要求。 (3)按地形图测绘的要求测得一像对的地物与高程点。 (4)进行影像匹配,生成编辑数字高程模型。 (5)生成正射影像。 3.课设中的精度要求 (1)内定向精度:中误差 0.005mm (2)相对定向精度:每点残差 0.020mm ; 中误差 0.010mm (3)绝对定向精度:所有点平面及高程中误差小于 0.3m (4)匹配窗口及间隔为 9 (5)DEM格网间隔为10m (6)正射影像分辨率 0.5mm (7)等高线间隔 5m (8)模型拼接精度:中误差小于2.0m,大于三倍中误差的点不超过百分之一(9)成图比例尺 1:5000 摄影测量过程应反复训练,达到软件使用熟练,操作合理,各种数据文件的查看和修改快捷等。
嘉鱼市国土资源局航空摄影测量及DEM、DOM、DLG生产项目 技术文件 [航空摄影部分] 武大吉奥信息技术有限公司 2009年10月
目录 1 航摄技术文件 (3) 1.1技术说明 (3) 1.1.1 含惯导的ADS40技术路线 (3) 1.1.2 不含惯导的DMC技术路线 (5) 1.1.3 传统彩色胶片相机技术路线 (6) 1.1.4 作业流程 (7) 1.2技术方案 (8) 1.2.1 主要工作内容 (8) 1.2.2 技术依据 (8) 1.2.3 测区概况 (9) 1.2.4 成图规格 (11) 1.2.5 航空摄影 (12)
1航摄技术文件 1.1技术说明 1.1.1含惯导的ADS40技术路线 ADS40是由全球著名的摄影测量公司徕卡公司开发的线阵列推扫式摄影系统,它高度集成了高精度全球定位系统(GPS)和惯性测量单元(IMU),其中高精度全球定位系统与地面基站GPS或精密星历数据联合解算后能够以2HZ频率提供高精度绝对坐标,具有长时低频高精度特点;惯性测量单元能够以200HZ频率记录航摄仪相对位置和高精度姿态数据,具有短时高频高精度的特点,两者紧密集成能够有效补偿彼此的系统误差,利用ADS40进行航空摄影,可以为每条扫描线产生准确的外方位元素。而利用摄影测量技术成图的关键技术是如何获取精确的影像外方位元素以恢复摄影时的立体状态,使用ADS40航摄系统进行航摄,一方面可以直接获取高清晰、高品质、高分辨率、多光谱数字航摄影像,另一方面能够获取每一条扫描影像的外方位元素,这样在影像后处理过程中只需结合精密卫星星历或GPS同步观测数据就能够得到准确的外方位元素,从而恢复整条航带摄影时的立体构像;空三加密处理时只需要在加密分区四角和中心加测像片控制点就可以保证影像空三加密精度,大大减少外业像控点数量,同时ADS40基高比较大,高程量测精度高,也可以成倍地减少外业高程控制点测量工作,有效缩短成图周期。4 采用ADS40实施航摄的总体技术步骤包括资料收集和空域申请、POS 辅助航空摄影、像片控制测量、航摄内业四个部分。 首先,根据合同要求收集测区必要的控制,地形图分幅图名,市行政划
第二章航空摄影测量的基本知识 主要内容 1.航摄仪和感光材料 2.航摄基本知识及其作用 比例尺重叠度(航向旁向) 相片偏角 3.投影比较:类型特点 第一节航空摄影仪与感光材料 一、航空摄影仪 指航空摄影机、地面摄影测量用的摄影经纬仪,以及近景摄 影测量用的摄影机,简称摄影机。主要由暗箱和镜箱构成。 1.镜箱物镜 物镜筒 座架 框标平面镜箱体是一个可调节摄影物镜与像平面之间距离的封闭筒 2.暗箱: 3.框标平面:镜箱体后端为一金属框架,研磨成极为精确的平面 作用:像点坐标量测 3.框标坐标: 在框标平面内区其交点作为坐标原点,建立起框标直角坐标系。航摄软片紧密贴附在框标平面上,所以框标平面即为像
平面的位置。 4.像主点:摄影机主光轴与像平面的交点 5.摄影机主距(像片主距):摄影机物镜后节点到像片主点的垂距称为摄影机主距,也叫像片主距,一般用字母f表示。 二、分类 (一)按摄影物镜焦距和像场角分为: 1.短焦距航摄仪, f<150 mm,相应的像场角为β>100o; 2.中焦距航摄仪 f:150 mm<<300 mm,像场角为70o<β<100o; 3.长焦距航摄仪 f>300 mm,相应的像场角为2≤70o。 二、分类 (二)按照像幅(正方形)大小分: 1.短焦距航空摄影机的像幅多为18 cm×18 cm 2.中焦距航空摄影机的像幅有18 cm×18 cm和23 cm×23 cm 3.长焦距航空摄影机的像幅多为23 cm×23 cm和30 cm×30 cm 第二节航空摄影测量对摄影资料的基本要 求 ?测绘地形------摄影多采用竖直摄影方式,即航摄机在曝光瞬 间物镜主光轴保持垂直于地面。 ?《航空摄影测量规范》要求像片倾角应小于2o~3o。
绪言: 遥感(Remote Sensing )R.S.:定义——不直接接触物体本身,而是通过电磁波来探测地球和其它星体的物体性质及特点的一门综合性的探测技术。 第一章感光测定 定义——定量的研究光对感光层的作用,并以数量表示其特性的一种方法称为感光测定。 感光特性: 感光度 S 反差系数γ 宽容度 L 灰雾密度 D0 感色性 微观特性: 分辨率 R 清晰度 A 颗粒度 RMS 调制传递函数 MTF 曝光量H ——感光材料的乳剂层在曝光时间内单位面积所受光通量的总和。 光学密度 D——感光材料经曝光显影后变黑的程度。 阻光率O=F0/F F0为入射光通量,F为出射光通量。 光学密度(密度):D=l g O 景物的反差U:景物中最亮部分的亮度与最暗部分的亮度之比。 影像反差△D:影像的最大密度与最小密度之差。 感光测定的步骤:曝光摄影处理量测密度绘制特性曲线 灰雾部分D0,趾部,直线部分,肩部,反转部分 反差系数γ——特性曲线的直线部分的斜率 γ=1 正确恢复了被摄景物的亮度差 γ>1 夸大了被摄景物的亮度差 γ<1 缩小了被摄景物的亮度差 从数值上说明了景物反差与影像反差之间的 关系,不受ΔD的影响,它是感光材料客观存在的 特性,它受显影条件的影响。 宽容度L——感光材料能够按比例记录景物亮度的曝光量范围。 分辨率:感光材料能清晰表达被摄景物微小细部的能力。 第二章空中摄影物理基础 1、大气对太阳辐射的吸收与散射作用有哪些异同点 吸收:(1)H20、CO2吸收红外,O3吸收紫外,尘埃则是非选择性吸收;(2)改变了太阳辐射的内能,使直射阳光的辐射能降低;(3)吸收仅降低大气透射率,航空景物反差不变。 散射:(1)散射强度取决于大气中气体分子的含量,有瑞利散射和弥散射两种;(2)散射只改变太阳辐射的方向,不改变内能;(3)散射会产生空中蒙雾亮度,降低航空景物的反差。 2、能够穿过大气层的电磁波谱段称为大气窗口;无法穿过大气层的电磁波谱段称为大气屏障。
航空摄影测量实习报告 航空摄影测量实习报告 一、实习目的 摄影测量与遥感实习是摄影测量学和遥感技术相应用的综合实习课。本课程的任务是通过实习掌握摄影测量的原理、影像处理方法、成图方法,掌握遥感的信息获取、图像处理、分类判读及制图的方法和作业程序。从而更系统地掌握摄影测量与遥感技术。通过实习使我们更熟练地掌握摄影测量及遥感的原理,信息获取的途径,数字处理系统和应用处理方法。进一步巩固和深化理论知识,理论与实践相结合。培养我们的应用能力和创新能力、工作认真、实事求是、吃苦耐劳、团结协作的精神,为以后从事生产实践工作打下坚实的理论与实践相结合的综合素质基础。 二、实习内容 1) 遥感影像图制作; 2) 相片控制测量; 3) 航空摄影测量相对立体观察与两侧; 4) 航片调绘、遥感图像属性调查; 5) 相片及卫片的判读及调绘 6) 调绘片的内页整饰 7) 撰写实习报告,提交成果。 三、实习设备与资料 1) 摄影测量与遥感书本上的理论知识。
2) 通过电脑查找有关这门学科的实践应用及其它相关知识等。 3) 电脑上相关的摄影测量的图片信息资料及判读方法。 4) 现有的实习报告模板及大学城空间里的相关教学资料。 四、实习时间与地点 时间:XX年6月19日——XX年6月26日。 地点:学校图书馆、教室、寝室及搜集摄影测量与遥感这门学科的资料等相关地方。 五、实习过程 5.1摄影测量与遥感学的发展情景 摄影测量与遥感是从摄影影像和其他非接触传感器系统获取所研究物体,主要是地球及其环境的可靠信息,并对其进行记录、量测、分析与应用表达的科学和技术。随着 摄影测量发展到数字摄影测量阶段及多传感器、多分辨率、多光谱、多时段遥感影像与空间科学、电子科学、地球科学、计算机科学以及其他边缘学科的交叉渗透、相互融合,摄影测量与遥感已逐渐发展成为一门新型的地球空间信息科学。由于它的科学性、技术性、应用性、服务性以及所涉及的广泛科学技术领域,其应用已深入到经济建设、社会发展、国家安全和人民生活等各个方面。 5.2单张像片测量原理 单张像片测图的基本原理是中心投影的透视变换,而摄影过程的几何反转则是立体测图的基本原理。广义来说,前一情况的基本原理也是摄影过程的几何反转。20世纪30年代以后,摄影过程的几何反转都是应用各种结构复杂的光学机械的精密仪器来实现的。50年代,开始应用数学解析的方式来实现。图1就是用
文章编号:049420911(2005)1120041202中图分类号:P204 文献标识码:B 数字航空摄影测量的相机检校 张建霞1,2,3,王留召2,3,4,刘先林3,李天子2,3,郭 辉2,3 (1.西安科技大学,陕西西安710054;2.河南理工大学,河南焦作454001;3.中国测绘科学研究院, 北京100039;4.昆明理工大学,云南昆明690053) C amera C alibration for Digital Air Survey ZH ANGJian 2xia ,W ANGLiu 2zhao ,LI U X ian 2lin ,LI T ian 2zi ,G UO Hui 摘要:介绍数字航空摄影测量中数字相机检校的理论与方法,主要包括检校场的建立、检校的数学模型及解算和检校结果的验证 等内容。通过实例验证与分析得出结论,为数字航空摄影测量系统研究的后续工作提供基础性的保证。 关键词:数字影像;相机检校;检校参数;航空摄影测量 收稿日期:2005204205 基金项目:河南省科技攻关资助项目(0524220043) 作者简介:张建霞(19752),男,江苏淮安人,讲师,主要从事摄影测量教学和研究工作。 一、引 言 目前国内航空摄影测量仍然大量使用进口的模拟航空摄影相机,不仅价格昂贵,要使用胶片,还要用昂贵的仪器进行胶片影像数字化,而且胶片动态 范围小(6~7bit ),航摄质量低,测图周期长,影响整个行业进步。另外,近几年国家每年有1亿多元的航空摄影任务,以国家、集体,甚至个人等形式的航摄队伍,都难以完成,只有发展新的数字航空摄影测量系统,才能适应这一需要。航空摄影用数字相机是数字航空摄影测量的关键设备,而数字相机不是专门为摄影测量设计的,是非量测相机,其内方位元素无法直接测定,也存在较大的光学畸变差。因此,数字相机的严格检校是数字航空摄影测量的基础性工作之一。 二、数字相机检校 1.数字相机及其检校 数字相机是由传统相机演变而来,仍使用传统的光学系统,只是图像信息的载体发生了变化,在原有胶片的位置换上了CC D 芯片。景物光信号通过CC D 转换为电信号,再由模数转换形成数字影像。 数字相机检校的目的是恢复影像光束的正确形状,即通过检校获取影像的内方位元素和各项畸变系数。 2.数字相机检校内容及误差来源分析 数字相机的检校内容包括主点位置(x 0,y 0)的测定;主距(f )的测定;光学畸变系数的测定。数字相机的误差由光学误差、电学误差和机械误差组成。 光学误差主要是指光学畸变误差,即指相机物镜系 统制作、装配引起的像点偏离其理想位置的点位误差,它分为径向畸变差和偏心畸变差两类;电学误差主要包括行同步误差、场同步误差和采样误差;机械误差是指从光学镜头摄取的影像转化到数字化阵列影像所产生的误差,主要由以下两个因素引起:①扫描阵列不平行于光学影像,致使数字化影像相对于光学影像有旋转;②每个阵列元素尺寸不同而产生不均匀变形。 3.数字相机检校的数学模型 本检校是一种基于空间后方交会的检校方法。它以共线方程为基础,以像点坐标作为观测值,解求相机内外方位元素、畸变系数以及其他附加参数的检校方法。顾及改正项的共线方程式为(x -x 0)+Δx = -f a 1(X -X S )+ b 1(Y -Y S )+ c 1(Z -Z S )a 3(X -X S )+b 3(Y -Y S )+c 3(Z -Z S ) (y -y 0)+Δy = -f a 2(X -X S )+ b 2(Y -Y S )+ c 2(Z -Z S ) a 3(X -X S )+ b 3(Y -Y S )+ c 3(Z -Z S ) (1)以像点坐标为观测值,可列出误差方程式 V =AX E +BX I +CX AD -L (2)式中,X E 表示影像外方位元素;X I 表示影像内方位 元素;X AD 表示一些附加参数,主要包括光学畸变改正项。 三、检校实例 1.概 述 本次数字相机检校的数学模型解算引进了墨尔 1 42005年 第11期 测 绘 通 报
航空摄影测量实习报告(精品 版) Practice report of aerial photogrammetry ( 实习报告 ) 汇报人:_________________________ 职务:_________________________ 日期:_________________________ 适用于工作总结/工作汇报/年终总结/全文可改
航空摄影测量实习报告(精品版) 一、实习目的 摄影测量与遥感实习是摄影测量学和遥感技术相应用的综合实习课。本课程的任务是通过实习掌握摄影测量的原理、影像处理方法、成图方法,掌握遥感的信息获取、图像处理、分类判读及制图的方法和作业程序。从而更系统地掌握摄影测量与遥感技术。通过实习使我们更熟练地掌握摄影测量及遥感的原理,信息获取的途径,数字处理系统和应用处理方法。进一步巩固和深化理论知识,理论与实践相结合。培养我们的应用能力和创新能力、工作认真、实事求是、吃苦耐劳、团结协作的精神,为以后从事生产实践工作打下坚实的理论与实践相结合的综合素质基础。 二、实习内容 1)遥感影像图制作; 2)相片控制测量;
3)航空摄影测量相对立体观察与两侧; 4)航片调绘、遥感图像属性调查; 5)相片及卫片的判读及调绘 6)调绘片的内页整饰 7)撰写实习报告,提交成果。 三、实习设备与资料 1)摄影测量与遥感书本上的理论知识。 2)通过电脑查找有关这门学科的实践应用及其它相关知识等。 3)电脑上相关的摄影测量的图片信息资料及判读方法。 4)现有的实习报告模板及大学城空间里的相关教学资料。 四、实习时间与地点 时间:2011年6月19日——2011年6月26日。 地点:学校图书馆、教室、寝室及搜集摄影测量与遥感这门学科的资料等相关地方。 五、实习过程 5.1摄影测量与遥感学的发展情景
浅析无人机航空摄影测量系统及应用 发表时间:2017-10-26T19:53:11.473Z 来源:《建筑科技》2017年9期作者:舒永国 [导读] 发展低空无人飞行器航测遥感系统是提高测绘现势性的迫切需要,是做好应急救急工作的迫切需要,是构建数字中国、数字城市建设的迫切需要。基于此,本文主要对无人机航空摄影测量系统及应用进行分析探讨。 北京市自来水集团禹通市政工程有限公司北京 100089 摘要:测绘测量技术系统是应对自然灾害、有效处置突发事件、构建完善保障系统与加强防灾减灾工作建设的重要组成部分,也是目前的一个重要战略问题。发展低空无人飞行器航测遥感系统是提高测绘现势性的迫切需要,是做好应急救急工作的迫切需要,是构建数字中国、数字城市建设的迫切需要。基于此,本文主要对无人机航空摄影测量系统及应用进行分析探讨。 关键词:无人机;航空摄影;测量系统;应用 1、前言 航空数字摄影测量是基础地理信息采集的最有效手段之一。随着计算机技术的发展和微处理机的广泛应用,政府各部门对测绘资料的需求越来越大,对资料现势性要求越来越高,对资料所能包涵的信息容量越来越多。无人机航空摄影测量作为一种新型的测量方式不断呈现在大家的面前,伴随着高科技技术环境下测绘技术与测绘装备的快速发展,融合了无人机技术、航空摄影技术、移动测量技术、数字通信技术等一系列新兴技术形态的无人机航空摄影测量系统成为防灾减灾的重要手段,它建立起一整套综合应急测绘保障服务系统。 2、无人机航空摄影测量系统 目前,国内已经投入使用的无人机航空摄影测量系统有“华鹰”、“飞象”、“QuickEye”等。无人机航空摄影测量系统主要由硬件系统和软件系统组成。硬件系统包括机载系统和地面监控系统;软件系统则涵盖了航线设计、飞行控制、远程监控、航摄检查、数据预处理等五个主要的系统。 2.1硬件系统 2.1.1无人机机载系统 在整个无人机航空摄影测量系统构成中,无人机作为主要的系统搭载平台,是整个系统集成与融合的重要基础。这一硬件系统主要由无人机、数字摄影系统、导航与飞行控制系统、通信系统等部分构成。在该系统工作的过程中,整个系统会按照预先设定的航线进行相应的自主飞行,并且完成预先设定的航空摄影测量任务,同时实时地把飞机的速度、高度、飞行状态、气象状况等参数传输给地面控制系统。 2.1.2地面飞行监控系统 这一分支系统是影响飞行平台运行的重要因素,主要有电子计算机、飞行控制软件、电子通信控制介质和电台等设备。在飞行平台的运行过程中,地面飞行控制系统可以据无人机飞行控制系统发回的飞行参数信息,实时在地图上精确标定飞机的位置、飞行路线、轨迹、速度、高度和飞行姿态,使地面操作人员更容易掌握无人机的飞行状况。 2.2软件系统 2.2.1航线设计软件 航线设计在无人机航空摄影测量系统中扮演着十分重要的角色,其直接决定了整个系统工作的方向和精准度。这一分支系统作为信息采集的关键步骤,需要对于系统运行经过的作业范围、地形地貌特点、属性精度要求、摄影测量参数以及摄影测量的结果进行综合设定。航线设计软件需要对相关的工作参数进行综合设定,诸如计算行高、重叠度和地面分辨率等飞行参数,进而获得飞行所需的曝光点坐标、基线长度等参数。此外,航线设计软件还有一个十分重要的功能,那就是对于设计好的航线进行检查,诸如:航线走向、摄影基面、行高、地面分辨率和像片重叠度等。 2.2.2数据接受与预处理系统 这是无人机系统中最为重要的软件系统,也是无人机航空摄影测量系统室外作业的最后一步,直接影响到后续的图像数据处理质量。一般情况下,无人机航空摄影测量系统在影像获取过程中,由于受外界和内部因素的影响,可能降低获取的原始图像的质量。为避免原始图像后续处理的质量问题,在影像配准、拼接之前,必须对原始影像进行预处理。这一预处理的过程,先后涵盖了图像校正、图像增强等方面。 3、项目应用实践 3.1工程概况 井山水库位于抚河流域东乡河南港支流黎圩水上游,地处江西省抚州市东乡县黎圩镇内,坝址位于南港支流东乡县黎圩镇井山村上游河段1.0km狭谷段,坝址区距黎圩镇约5km,距东乡县县城约25km,控制流域面积25.2km2,正常蓄水位83.00m(黄海高程,下同),总库容2250×104m3,是一座灌溉、供水等综合效益的中型水利枢纽工程。 3.2外业测量 3.2.1航摄 航摄仪采用Sonya7R,焦距35mm,相幅大小为:7360×4192,像元分辨率为4.88um。本次无人机航摄分两个架次进行,由GPS领航数据计算相对飞行高度为724m,地面分辨率为0.09m,航摄面积约10km2。两个架次飞行质量和影像良好,影像清晰度较高,且照片色彩均匀,饱和度良好,能够表达真实的地物信息,可以满足1:2000成图要求。本次飞行航向重叠度为75%,旁向重叠度为50%。 3.2.2像控测量 像控点的布设应能够有效控制成图的范围,测区的四周及中心位置必须布设控制点,根据测区的情况,每个测区布设控制点20多个,且都设置为平高点。 3.2.3空中三角测量 本项目采用SVS软件进行空三加密,根据航空飞行及影像分布情况,将空三区域分为两个加密区域网采用自动与手动相结合的方式进行空三加密,即采用自动匹配进行像点量测,剔除粗差。人工调整直至连接点符合规范要求,保证在2/3个像素以内。加入外业像控点对本
航空摄影测量的技术流 程 WTD standardization office【WTD 5AB- WTDK 08- WTD 2C】
嘉鱼市国土资源局航空摄影测量及DEM、DOM、DLG生产项目 技术文件 [航空摄影部分] 武大吉奥信息技术有限公司 2009年10月
目录 1 航摄技术文件.................................................................................................................................................. 技术说明 ...................................................................................................................................................... 含惯导的ADS40技术路线.................................................................................................................... 不含惯导的DMC技术路线 .................................................................................................................. 传统彩色胶片相机技术路线................................................................................................................. 作业流程................................................................................................................................................. 技术方案 ...................................................................................................................................................... 主要工作内容......................................................................................................................................... 技术依据................................................................................................................................................. 测区概况................................................................................................................................................. 成图规格................................................................................................................................................. 航空摄影 .................................................................................................................................................... 1航摄技术文件 1.1技术说明 1.1.1含惯导的ADS40技术路线 ADS40是由全球着名的摄影测量公司徕卡公司开发的线阵列推扫式摄影系统,它高度集成了高精度全球定位系统(GPS)和惯性测量单元(IMU),其中高精度全球定位系统与地面基站GPS或精密星历数据联合解算后能够以2HZ频率提供高精度绝对坐
摄影测量学定义:是利用光学或数码摄影机获取的影像,经过处理以获取被摄物体的形状、大小、位置、性质和相互关系的一门学科。 摄影测量的分类:(1)按摄站位置:1.航天摄影测量2.航空摄影测量3.地面摄影测量(2)按研究对象:1.地形摄影测量2.非地形摄影测量(3)按处理方法:1.模拟摄影测量2.解析摄影测量3.数字摄影测量 摄影测量的主要任务:1.包括定量的(几何处理):解决是多少的问题、定性的(解译处理):解决是什么的问题 摄影测量的发展历程:模拟摄影测量(1851-1960’s),解析摄影测量(1950’s-1980’s),数字摄影测量(1970’s-现在)。 遥感定义:是指通过非接触传感器遥测物体的几何与物理特性的一门学科。 遥感类型:按传感器探测波段分:1.紫外遥感:~.可见光遥感:~.红外遥感:~1000um4.微波遥感:1mm~10m5.多光谱遥感:可见光和近红外,多个波段。2.按成像方式分:摄影遥感、扫描方式遥感;雷达遥感。遥感技术系统的组成:由平台、传感、接收、处理应用各子系统所组成 遥感特点与作用:1.大面积同步观测2.时效性强3.数据的综合性和可比性好4.较高的经济与社会效益5.一定的局限性。 摄影测量与遥感的关系:遥感技术为摄影测量提供了多种数据来源,从而扩大了摄影测量的应用领域。 航空摄影:又称航拍,是指在飞机或其他航空飞行器上利用航空摄影机摄取地面景物像片的技术。 航摄仪的类型:胶片航摄仪、数字航摄仪。 航空摄影测量的基本要求(主要是航向、旁向重叠度) 航摄像片与地形图的区别 像片倾斜角、摄影比例尺的概念 航空像片上的三点两线、类型 第二部分航空摄影测量基础 第二章航测外业 摄影测量外业工作任务 像片判读、像片调绘
合同编号: 技术开发(委托)合同 项目名称:市航空港区数字航空摄影与1:1000数 字正射影像地图制作 委托方(甲方):航空港区管理委员会 受托方(乙方):中煤地()视讯科技有限公司签订时间:2014年4月25日 签订地点:市 中华人民国科学技术部印制
填写说明 一、本合同为中华人民国科学技术部印制的技术开发(委托) 合同示文本,各技术合同登记机构可推介技术合同当事人参照使用。 二、本合同书适用于一方当事人委托另一方当事人进行新技术、新产品、新工艺、新材料或者新品种及其系统的研究开发所订立的技术开发合同。 三、签约一方为多个当事人的,可按各自在合同关系中的作用等,在“委托方”、“受托方”项下(增页)分别排列为共同委托人或共同受托人。 四、本合同书未尽事项,可由当事人附页另行约定,并可作为本合同的组成部分。 五、当事人使用本合同书时约定无需填写的条款,应在该条款处注明“无”等字样。
本合同为航空港区管理委员会(下简称甲方)委托受托方中煤地()视讯科技有限公司(下简称乙方),进行航空港区数字航空摄影与1:1000数字正射影像地图制作开发工作,并支付相关费用。双方经过平等协商,在真实、充分表达各自意愿的基础上,根据《中华人民国合同法》、《中华人民国测绘法》和有关法律法规的规定,本着平等自愿和诚实信用的原则,一致同意签订如下合同:第一条:测绘围 按甲方提供的摄区围,面积约398.6平方公里。 摄区边界个拐点坐标及指定区域的植被调查围图纸附后。 第二条:测绘容及要求 1. 摄影面积:约398.6平方公里 2. 测绘容: (1)真彩色航空摄影约398.6平方公里 (2)1:1000正射影像图制作约398.6平方公里 (3)植被围调查35平方公里 3. 技术要求: (1)航空摄影
湘潭大学 毕业设计说明书 题目:太浮山旅游公路1:2000数字地形图航空摄影测量技术设计 学院: 专业: 学号: 姓名: 指导教师: 完成日期: 2013年5月25日
湘潭大学 毕业论文(设计)任务书 设计题目:XX公路1:2000带状地形图航空摄影测量技术设计 学号:姓名:专业: 指导教师:系主任: 一、主要内容及基本要求 主要内容: 1、航空摄影技术设计。航空摄影基本技术指标和要求,航摄参数的确定。 2、基础控制测量。包括四等首级平面控制网、一级导线加密控制网方案以及四等水准。 3、1:2000数字线划图(DLG)生产技术设计。航空摄影测量实施方案,1:2000数字线划图(DLG)生产工作流程,像控点布设及测量,内业空三加密,数字线划图成果的制作。 基本要求: 1、设计方案可行,精度合理,技术指标符合规范要求。 2、应提供必要的技术设计图表。 3、应参照《测绘技术设计规定》并结合项目要求编写设计书的基本内容。 4、论文格式及文本要求应符合湘潭大学毕业论文(设计说明书)文本要求规定。 二、重点研究的问题 1、航空摄影方案设计 2、基础平面和高程测量方案设计 3、1:2000数字地形图航空摄影测量方案设计
三、进度安排 序号各阶段完成的内容完成时间 1 选题2012年12月底前 2 查阅资料、调研2013.2.20~3.15 3 方案设计及论证2013.3.16~4.10 4 写出初稿并交老师审阅2013.4.11~5.10 5 修改,写出第二稿并交老师审阅2013.5.11~5.20 6 完善方案设计、写出正式稿2013.5.21~5.26 7 打印、上交设计书2013年5月底 8 答辩2013.5.26 四、应收集的资料及主要参考文献 应收集的资料:测区范围、测区内地理概况、交通、气象、居民等情况说明; 已有测绘资料情况;测区1:1万地形图; [1] 孔祥元,郭际明.控制测量学下册[M].武汉:武汉大学出版社,2011 [2]中国标准出版社第四编辑室.测绘标准汇编摄影测量与遥感卷[S].北京:中国标准 出版社,2009 [3]GB/T 18314-2009 全球定位系统测量规范.北京:中国标准出版社,2009 [4]GB/T 12898-2009 国家三、四等水准测量规范.北京:中国标准出版社,2009 [5]CH 1002-1995 测绘产品质量评定标准.北京:中国标准出版社,1995 [6]GB/T 7929-1995 1:500 1:1000 1:2000地形图图式.北京:中国标准出版社,1995 [7]北京市测绘设计研究院.CJJ 8-99城市测量规范[S].中国建筑工业出版社,1999 [8]交通部第一公路勘察设计院.JJG C10-2007公路勘测规范.人民交通出版社,1999 9]赵吉先,吴良才,周世健.地下工程测量[M].北京:测绘出版社,2011 [10]徐绍铨,张华海,杨志强,王泽民.GPS测量原理及应用[M].武汉:武汉大学出版社, 2011 [11]CH 1002-1995 测绘产品质量检查验收规定.北京:中国标准出版社,1995 [12]CH/T 1004-2005 测绘技术设计设计规定.北京:中国标准出版社,2005