文章编号:1004-2539(2009)01-0063-02
基于SlidWorks 运动仿真的平面八连杆机构优化设计
李启鹏1 刘万俊1 仝崇楼1 龚小平2
(1空军工程大学工程学院, 陕西西安 710038)
(2空军工程大学理学院, 陕西西安 710051)
摘要 从工程实际出发,建立了平面八连杆机构的数学模型,应用约束变尺度优化算法进行了优化
设计,并在SolidWorks 软件中建立了装配体模型,应用其中的COSMOSMotion 插件进行了机构运动仿真,为机构优化设计提供了一种高效、直观的仿真手段,提高了对平面多连杆机构的分析设计能力;同时,也为其他机构的仿真设计提供了借鉴。
关键词 平面多连杆机构 约束变尺度法 优化设计 SolidWorks 运动仿真
0 引言连杆机构能够简便地实现给定的运动规律和运动
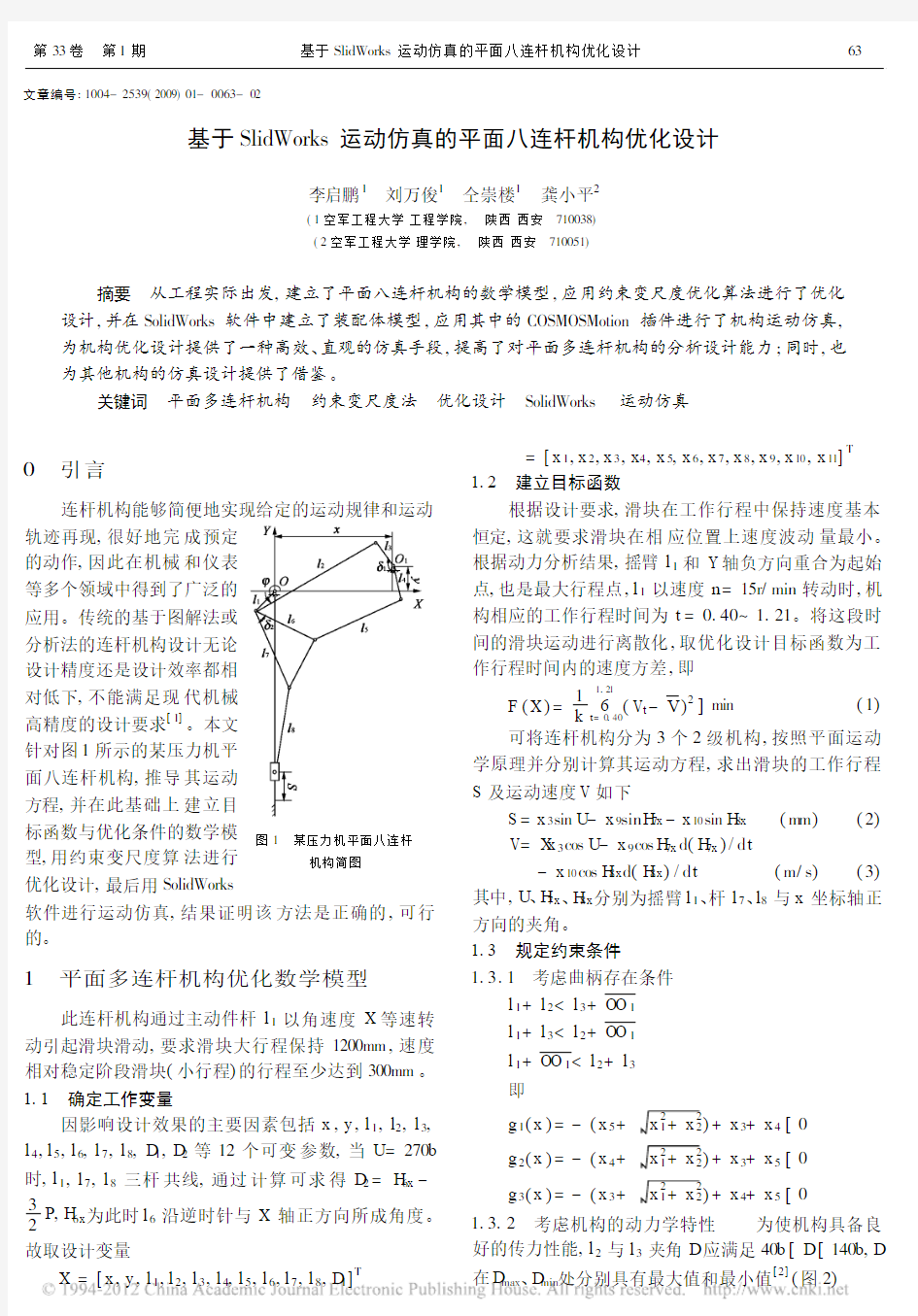
图1 某压力机平面八连杆机构简图轨迹再现,很好地完成预定
的动作,因此在机械和仪表
等多个领域中得到了广泛的
应用。传统的基于图解法或
分析法的连杆机构设计无论
设计精度还是设计效率都相
对低下,不能满足现代机械
高精度的设计要求[1]。本文
针对图1所示的某压力机平
面八连杆机构,推导其运动
方程,并在此基础上建立目
标函数与优化条件的数学模
型,用约束变尺度算法进行
优化设计,最后用SolidWorks
软件进行运动仿真,结果证明该方法是正确的,可行
的。1 平面多连杆机构优化数学模型此连杆机构通过主动件杆l 1以角速度X 等速转动引起滑块滑动,要求滑块大行程保持1200mm ,速度相对稳定阶段滑块(小行程)的行程至少达到300mm 。1.1 确定工作变量因影响设计效果的主要因素包括x ,y ,l 1,l 2,l 3,l 4,l 5,l 6,l 7,l 8,D 1,D 2等12个可变参数,当U =270b 时,l 1,l 7,l 8三杆共线,通过计算可求得D 2=H 6x -
32
P ,H 6x 为此时l 6沿逆时针与X 轴正方向所成角度。故取设计变量X =[x ,y ,l 1,l 2,l 3,l 4,l 5,l 6,l 7,l 8,D 1]T =[x 1,x 2,x 3,x 4,x 5,x 6,x 7,x 8,x 9,x 10,x 11]
T 1.2 建立目标函数根据设计要求,滑块在工作行程中保持速度基本恒定,这就要求滑块在相应位置上速度波动量最小。根据动力分析结果,摇臂l 1和Y 轴负方向重合为起始点,也是最大行程点,l 1以速度n =15r/min 转动时,机构相应的工作行程时间为t =0.40~1.21。将这段时间的滑块运动进行离散化,取优化设计目标函数为工作行程时间内的速度方差,即F (X )=1k 61.21t =0.40(V t -V)2]min (1)可将连杆机构分为3个2级机构,按照平面运动学原理并分别计算其运动方程,求出滑块的工作行程S 及运动速度V 如下S =x 3sin U -x 9sin H 7x -x 10sin H 8x (m m ) (2)V =X x 3cos U -x 9cos H 7x d (H 7x )/d t -x 10cos H 8x d (H 8x )/d t (m/s ) (3)其中,U 、H 7x 、H 8x 分别为摇臂l 1、杆l 7、l 8与x 坐标轴正方向的夹角。
1.3 规定约束条件
1.3.1 考虑曲柄存在条件
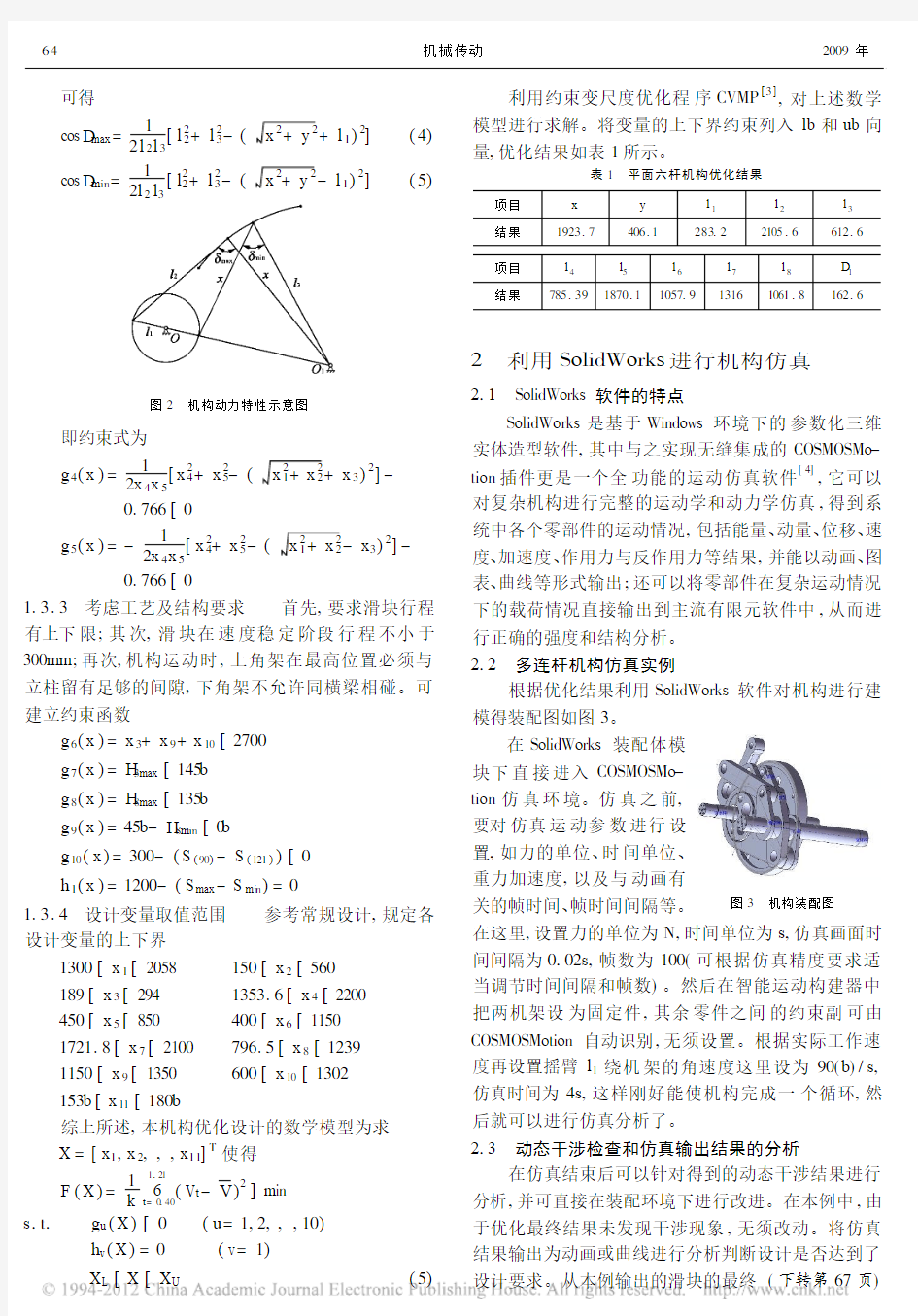
l 1+l 2 l 1+l 3 l 1+OO 1 即 g 1(x )=-(x 5+ x 21+x 22)+x 3+x 4[0g 2(x )=-(x 4+ x 21+x 22)+x 3+x 5[0g 3(x )=-(x 3+x 21+x 22)+x 4+x 5[01.3.2 考虑机构的动力学特性 为使机构具备良好的传力性能,l 2与l 3夹角D 应满足40b [D [140b ,D 在D max 、D min 处分别具有最大值和最小值 [2](图2)63第33卷 第1期 基于SlidWorks 运动仿真的平面八连杆机构优化设计 可得 cos D max =12l 2l 3 [l 22+l 23-(x 2+y 2+l 1)2](4)cos D min =12l 2l 3[l 22+l 23-(x 2+y 2-l 1) 2](5)图2 机构动力特性示意图即约束式为g 4(x )=12x 4x 5[x 24+x 25-(x 21+x 22+x 3)2]-0.766[0g 5(x )=-12x 4x 5[x 24+x 25-(x 21+x 22-x 3)2]-0.766[01.3.3 考虑工艺及结构要求 首先,要求滑块行程有上下限;其次,滑块在速度稳定阶段行程不小于300mm ;再次,机构运动时,上角架在最高位置必须与立柱留有足够的间隙,下角架不允许同横梁相碰。可建立约束函数g 6(x )=x 3+x 9+x 10[2700g 7(x )=H 3max [145b g 8(x )=H 8max [135b g 9(x )=45b -H 8min [0b g 10(x )=300-(S (90)-S (121))[0h 1(x )=1200-(S max -S mi n )=01.3.4 设计变量取值范围 参考常规设计,规定各 设计变量的上下界 1300[x 1[2058 150[x 2[560 189[x 3[294 1353.6[x 4[2200450[x 5[850 400[x 6[11501721.8[x 7[2100 796.5[x 8[12391150[x 9[1350 600[x 10[1302153b [x 11[180b 综上所述,本机构优化设计的数学模型为求 X =[x 1,x 2,,,x 11]T 使得F (X )=1k 61.21t =0.40 (V t -V)2]min s.t. g u (X )[0 (u =1,2,,,10) h v (X )=0 (v =1)X L [X [X U (5)利用约束变尺度优化程序CVMP [3],对上述数学模型进行求解。将变量的上下界约束列入lb 和ub 向量,优化结果如表1所示。表1 平面六杆机构优化结果 项目 x y l 1l 2l 3结果 1923.7406.1283.22105.6612.6项目 l 4l 5l 6l 7l 8D 1结果785.391870.11057.913161061.8162.6 2 利用SolidWorks 进行机构仿真 2.1 SolidWorks 软件的特点 SolidWorks 是基于Windows 环境下的参数化三维 实体造型软件,其中与之实现无缝集成的COSMOSMo - tion 插件更是一个全功能的运动仿真软件[4],它可以 对复杂机构进行完整的运动学和动力学仿真,得到系 统中各个零部件的运动情况,包括能量、动量、位移、速 度、加速度、作用力与反作用力等结果,并能以动画、图 表、曲线等形式输出;还可以将零部件在复杂运动情况 下的载荷情况直接输出到主流有限元软件中,从而进 行正确的强度和结构分析。 2.2 多连杆机构仿真实例 根据优化结果利用SolidWorks 软件对机构进行建 模得装配图如图3。 图3 机构装配图在SolidWorks 装配体模 块下直接进入COSMOSMo - tion 仿真环境。仿真之前, 要对仿真运动参数进行设 置,如力的单位、时间单位、 重力加速度,以及与动画有 关的帧时间、帧时间间隔等。在这里,设置力的单位为N,时间单位为s,仿真画面时间间隔为0.02s,帧数为100(可根据仿真精度要求适当调节时间间隔和帧数)。然后在智能运动构建器中把两机架设为固定件,其余零件之间的约束副可由COSMOSMotion 自动识别,无须设置。根据实际工作速度再设置摇臂l 1绕机架的角速度这里设为90(b )/s,仿真时间为4s,这样刚好能使机构完成一个循环,然后就可以进行仿真分析了。2.3 动态干涉检查和仿真输出结果的分析在仿真结束后可以针对得到的动态干涉结果进行分析,并可直接在装配环境下进行改进。在本例中,由于优化最终结果未发现干涉现象,无须改动。将仿真结果输出为动画或曲线进行分析判断设计是否达到了设计要求。从本例输出的滑块的最终(下转第67页) 64 机械传动 2009年 轮泵的40%,此外,余弦齿轮泵困油容积的变化幅值 也只有渐开线的25%。因此,余弦齿轮泵减轻了困油 容积变化过程形成的局部真空和气穴,有利于减小振 动和噪声,提高了齿轮泵的工作平稳性和寿命,具有较 好的应用前景及推广价值。 有关余弦齿轮泵的加工及试验等工作正在进行之 中,相关研究成果将另行撰文讨论。 参考文献[1] 何存兴.液压元件[M].北京:机械工业出版社,1981:24-38.[2] 臧克江,周欣,顾立志,等.降低齿轮泵困油压力新方法的研究[J].中国机械工程,2004,15(7):578-581.[3] 周德军.双重卸荷槽-消除齿轮泵困油压力新方法的研究[J].液压气动与密封,2006,(6):21-23.[4] 牛兰芹,吴炳胜,姬晓利,等.消除齿轮泵困油现象的新措施[J ].液压与气动,2006,(6):56-58.[5] K Nagamura,K Ikejo and F G Tutul an.Desi gn and performance of gear pumps with a non-involute tooth profile[J].Proceedings of the Ins ti tu - tion of Mechanical Engineers ,Part B :Engineering Manufac ture,2004,218(7):699-711.[6] 罗善明,王建,余以道,等.余弦齿轮传动机构:中国,200710034766.1[P].2007.[7] Luo Shanming,Wu Yue,Wang Ji an,et al.The Generation Princi ple and M athematical Models of a Novel Gear Drive[J].M echanis m and Machi ne Theory,2008,43(12):1543-1556.[8] 王建.余弦齿轮传动的原理与特性研究[D].湖南科技大学,2007:24-28.[9] 崔建昆,秦山,闻斌.直线共轭内啮合齿轮副啮合特性分析[J].机 械传动,2004,28(6):12-15. [10] 刘忠明,侯东海,王小椿,等.一种复合型线齿轮泵的齿廓反求及 分析[J].机械传动,2000,24(1):13-24. 收稿日期:20080312 基金项目:国家自然科学基金(50575071),湖南省杰出青年基金 (06JJ 10008),湖南省科技计划项目(2007FJ4047),教育部新世 纪优秀人才支持计划 作者简介:胡华荣(1977-),男,河南郸城人,硕士,讲师(上接第64页) 位移、速度和加速度曲线(图4~图6)可以看出滑块在 工作行程内速度基本不变,说明优化的结果基本满足 需要。图4 滑块运动位置变化图图5 滑块运动速度变化图3 结束语(1)应用计算机辅助技术将机构优化设计与运动仿真有机结合起来,为机构设计提供了一种切实可行 的可视化、 实时化设计新思路。 图6 滑块运动加速度变化图 (2)以机构分析为基础,利用C MVP 优化算 法进行了优化设计,优化效果显著,大大提高了设计的 质量和效率。 参考文献 [1] 孙恒,陈作模.机械原理[M ].北京:高等教育出版社,1995:44- 75. [2] 邹慧君,傅祥志,张春林,等.机械原理[M ].北京:高等教育出版 社,1999:75-85. [3] 龚小平.约束变尺度优化算法研究及平面连杆机构优化设计 [D].西安:西安交通大学,1987. [4] SolidWorks Inc.COSMOSMoti on User .s Gui de[CP].2007. 收稿日期:20080310 收修改稿日期:20080604 作者简介:李启鹏(1982-),男,山东德州人,硕士研究生67第33卷 第1期 余弦齿廓齿轮泵的困油特性分析 机械优化设计在matlab中的应用 东南大学机械工程学院** 一优化设计目的: 在生活和工作中,人们对于同一个问题往往会提出多个解决方案,并通过各方面的论证从中提取最佳方案。最优化方法就是专门研究如何从多个方案中科学合理地提取出最佳方案的科学。由于优化问题无所不在,目前最优化方法的应用和研究已经深入到了生产和科研的各个领域,如土木工程、机械工程、化学工程、运输调度、生产控制、经济规划、经济管理等,并取得了显著的经济效益和社会效益。 二优化设计步骤: 1.机械优化设计的全过程一般可以分为如下几个步骤: 1)建立优化设计的数学模型; ' 2)选择适当的优化方法; 3)编写计算机程序; 4)准备必要的初始数据并伤及计算; 5)对计算机求得的结果进行必要的分析。 其中建立优化设计数学模型是首要的和关键的一步,它是取得正确结果的前提。优化方法的选取取决于数学模型的特点,例如优化问题规模的大小,目标函数和约束函数的性态以及计算精度等。在比较各种可供选用的优化方法时,需要考虑的一个重要因素是计算机执行这些程序所花费的时间和费用,也即计算效率。 2.建立数学模型的基本原则与步骤 ①设计变量的确定; 设计变量是指在优化设计的过程中,不断进行修改,调整,一直处于变化的参数称为设计变量。设计变量的全体实际上是一组变量,可用一个列向量表示: - x=。 ②目标函数的建立; 选择目标函数是整个优化设计过程中最重要的决策之一。当对某以设计性能有特定的要求,而这个要求有很难满足时,则针对这一性能进行优化会得到满意的效果。目标函数是设计变量的函数,是一项设计所追求的指标的数学反映,因此它能够用来评价设计的优劣。 目标函数的一般表达式为: f(x)=,要根据实际的设计要求来设计目标函数。 ③约束条件的确定。 一个可行性设计必须满足某些设计限制条件,这些限制条件称为约束条件,简称约束。 由若干个约束条件构成目标函数的可行域,而可行域内的所有设计点都是满足设计要求的,一般情况下,其设计可行域可表示为 … 第八章平面连杆机构及其设计 一、填空题: 1.平面连杆机构是由一些刚性构件用转动副和移动副连接组成的。 2.在铰链四杆机构中,运动副全部是低副。 3.在铰链四杆机构中,能作整周连续回转的连架杆称为曲柄。 4.在铰链四杆机构中,只能摆动的连架杆称为摇杆。 5.在铰链四杆机构中,与连架杆相连的构件称为连杆。 6.某些平面连杆机构具有急回特性。从动件的急回性质一般用行程速度变化系数表示。 7.对心曲柄滑块机构无急回特性。 8.平行四边形机构的极位夹角θ=00,行程速比系数K= 1 。 9.对于原动件作匀速定轴转动,从动件相对机架作往复直线运动的连杆机构,是否有急回 特性,取决于机构的极位夹角是否为零。 10.机构处于死点时,其传动角等于0?。 11.在摆动导杆机构中,若以曲柄为原动件,该机构的压力角α=00。 12.曲柄滑块机构,当以滑块为原动件时,可能存在死点。 13.组成平面连杆机构至少需要 4 个构件。 二、判断题: 14.平面连杆机构中,至少有一个连杆。(√) 15.在曲柄滑块机构中,只要以滑块为原动件,机构必然存在死点。(√) 16.平面连杆机构中,极位夹角θ越大,K值越大,急回运动的性质也越显著。(√) 17.有死点的机构不能产生运动。(×) 18.曲柄摇杆机构中,曲柄为最短杆。(√) 19.双曲柄机构中,曲柄一定是最短杆。(×) 20.平面连杆机构中,可利用飞轮的惯性,使机构通过死点位置。(√) 21.在摆动导杆机构中,若以曲柄为原动件,则机构的极位夹角与导杆的最大摆角相等。 (√) 22.机构运转时,压力角是变化的。(√) 三、选择题: 23.铰链四杆机构存在曲柄的必要条件是最短杆与最长杆长度之和 A 其他两杆之和。 A ≤ B ≥ C > 24.铰链四杆机构存在曲柄的必要条件是最短杆与最长杆长度之和小于或等于其他两杆之和,而 充分条件是取 A 为机架。 A 最短杆或最短杆相邻边 B 最长杆 C 最短杆的对边。 25.铰链四杆机构中,若最短杆与最长杆长度之和小于其余两杆长度之和,当以 B 为机架时, 有两个曲柄。 A 最短杆相邻边 B 最短杆 C 最短杆对边。 26.铰链四杆机构中,若最短杆与最长杆长度之和小于其余两杆长度之和,当以 A 为机架时, 有一个曲柄。 A 最短杆相邻边 B 最短杆 C 最短杆对边。 27.铰链四杆机构中,若最短杆与最长杆长度之和小于其余两杆长度之和,当以 C 为机架时, 无曲柄。 A 最短杆相邻边 B 最短杆 C 最短杆对边。 28.铰链四杆机构中,若最短杆与最长杆长度之和 B 其余两杆长度之和,就一定是双摇杆 机构。 A < B > C = 29.对曲柄摇杆机构,若曲柄与连杆处于共线位置,当 C 为原动件时,此时机构处在死点位 置。 A 曲柄 B 连杆 C 摇杆 30.对曲柄摇杆机构,若曲柄与连杆处于共线位置,当 A 为原动件时,此时为机构的极限 位置。 A 曲柄 B 连杆 C 摇杆 31.对曲柄摇杆机构,当以曲柄为原动件且极位夹角θ B 时,机构就具有急回特性。 A <0 B >0 C =0 32.对曲柄摇杆机构,当以曲柄为原动件且行程速度变化系数K B 时,机构就具有急 回特性。 A <1 B >1 C =1 33.在死点位置时,机构的压力角α= C 。 A 0 o B 45o C 90o 34.若以 B 为目的,死点位置是一个缺陷,应设法通过。 A 夹紧和增力B传动 35.若以 A 为目的,则机构的死点位置可以加以利用。 A 夹紧和增力;B传动。 实现预定轨迹的平面四连杆机构的优化设计 汕头大学工学院 09机电系citycars 摘 要: 四连杆机构是工程上广泛应用的传动机构,按照预定的轨迹曲线设计平面连杆机构,就是要确定机构的各尺寸参数和连杆上的描点位置,使该点所描的连杆曲线与预定的轨迹相符。利用软件Matlab 优化工具箱进行优化设计,使得实际运动轨迹与预定的轨迹误差最小,得到最优的连杆参数。 关键词:平面四连杆机构 预定轨迹 优化设计 For achieving the orbit of the plane four bar linkage of optimization design Abstract : Four bar linkage is widely used in engineering transmission mechanism, according to the predetermined path curve planar linkage mechanism design is to determine the size of the agency and the parameters of the tracing points, and make the point of link curve and draw a path consistent. Use of software Matlab optimal toolbox for optimum design, make the actual trajectory and scheduled path error smallest, the optimal parameters of the connecting rod. Key words: Plane four bar linkage Scheduled path Optimization design 1 问题描述 设计一平面四连杆机构,如图1所示。要求曲柄在运动过程中实现运动轨迹x y 2= ,52< 课程设计任务书 目录 1 绪论 (1) 1.1CATIA V5软件介绍 (1) 1.2ADAMS软件介绍 (1) 1.3S IM D ESIGNER软件介绍 (2) 1.4本次课程设计的主要内容及目的 (2) 2 曲柄连杆机构的建模 (3) 2.1活塞的建模 (3) 2.2活塞销的建模 (5) 2.3连杆的建模 (5) 2.4曲轴的建模 (6) 2.5汽缸体的建模 (8) 3 曲柄连杆机构的装配 (10) 3.1将各部件导入CATIA装配模块并利用约束命令确定位置关系 (10) 4 曲柄连杆机构导入ADAMS (14) 4.1曲柄连杆机构各个零部件之间运动副分析 (14) 4.2曲柄连杆机构各个零部件之间运动副建立 (14) 4.3曲柄连杆机构导入ADAMS (16) 5 曲柄连杆机构的运动学分析 (17) 结束语 (21) 参考文献 (22) 1 绪论 1.1 CATIA V5软件介绍 CATIA V5(Computer-graphics Aided Three-dimensional Interactive Application)是法国Dassault公司于1975年开发的一套完整的3D CAD/CAM/CAE一体化软件。它的内容涵盖了产品概念设计、工业设计、三维建模、分析计算、动态模拟与仿真、工程图的生成、生产加工成产品的全过程,其中还包括了大量的电缆和管道布线、各种模具设计与分析、人机交换等实用模块。CATIA V5不但能保证企业内部设计部门之间的协同设计功能而且还可以提供企业整个集成的设计流程和端对端的解决方案。CATIA V5大量应用于航空航天、汽车及摩托车行业、机械、电子、家电与3C产业、NC加工等领域。 由于其功能的强大而完美,CATIA V5已经成为三维CAD/CAM领域的一面旗帜和争相遵从的标准,特别是在航空航天、汽车及摩托车领域。法国的幻影2000系列战斗机就是使用CATIA V5进行设计的一个典范;波音777客机则使用CATIA V5实现了无图纸设计。另外,CATIA V5还用于制造米其林轮胎、伊莱克斯电冰箱和洗衣机、3M公司的粘合剂等。CATIA V5不仅给用户提供了详细的解决方案,而且具有先进的开发性、集成性及灵活性。 CATIA V5的主要功能有:三维几何图形设计、二维工程蓝图绘制、复杂空间曲面设计与验证、三维计算机辅助加工制造、加工轨迹模拟、机构设计及运动分析、标准零件管理。 1.2 ADAMS软件介绍 ADAMS即机械系统动力学自动分析(Automatic Dynamic Analysis of Mechanical Systems),该软件是美国MDI公司(Mechanical Dynamics Inc.)开发的虚拟样机分析软件。目前,ADAMS己经被全世界各行各业的数百家主要制造商采用。根据1999年机械系统动态仿真分析软件国际市场份额的统计资料,ADAMS软件销售总额近八千万美元、占据了51%的份额。 ADAMS软件使用交互式图形环境和零件库、约束库、力库,创建完全参数化的机械系统几何模型,其求解器采用多刚体系统动力学理论中的拉格郎日方程方法,建立系统动力学方程,对虚拟机械系统进行静力学、运动学和动力学分析,输出位移、速度、加速度和反作用力曲线。ADAMS软件的仿真可用于预测机械系统的性能、运动范围、 2 平面机构的运动分析 1.图 示 平 面 六 杆 机 构 的 速 度 多 边 形 中 矢 量 ed → 代 表 , 杆4 角 速 度 ω4的 方 向 为 时 针 方 向。 2.当 两 个 构 件 组 成 移 动 副 时 ,其 瞬 心 位 于 处 。当 两 构 件 组 成 纯 滚 动 的 高 副 时, 其 瞬 心 就 在 。当 求 机 构 的 不 互 相 直 接 联 接 各 构 件 间 的 瞬 心 时, 可 应 用 来 求。 3.3 个 彼 此 作 平 面 平 行 运 动 的 构 件 间 共 有 个 速 度 瞬 心, 这 几 个 瞬 心 必 定 位 于 上。 含 有6 个 构 件 的 平 面 机 构, 其 速 度 瞬 心 共 有 个, 其 中 有 个 是 绝 对 瞬 心, 有 个 是 相 对 瞬 心。 4.相 对 瞬 心 与 绝 对 瞬 心 的 相 同 点 是 ,不 同 点 是 。 5.速 度 比 例 尺 的 定 义 是 , 在 比 例 尺 单 位 相 同 的 条 件 下, 它 的 绝 对 值 愈 大, 绘 制 出 的 速 度 多 边 形 图 形 愈 小。 6.图 示 为 六 杆 机 构 的 机 构 运 动 简 图 及 速 度 多 边 形, 图 中 矢 量 cb → 代 表 , 杆3 角 速 度ω3 的 方 向 为 时 针 方 向。 7.机 构 瞬 心 的 数 目N 与 机 构 的 构 件 数 k 的 关 系 是 。 8.在 机 构 运 动 分 析 图 解 法 中, 影 像 原 理 只 适 用 于 。 9.当 两 构 件 组 成 转 动 副 时, 其 速 度 瞬 心 在 处; 组 成 移 动 副 时, 其 速 度 瞬 心 在 处; 组 成 兼 有 相 对 滚 动 和 滑 动 的 平 面 高 副 时, 其 速 度 瞬 心 在 上。 10..速 度 瞬 心 是 两 刚 体 上 为 零 的 重 合 点。 11.铰 链 四 杆 机 构 共 有 个 速 度 瞬 心,其 中 个 是 绝 对 瞬 心, 个 是 相 对 瞬 心。 12.速 度 影 像 的 相 似 原 理 只 能 应 用 于 的 各 点, 而 不 能 应 用 于 机 构 的 的 各 点。 13.作 相 对 运 动 的3 个 构 件 的3 个 瞬 心 必 。 14.当 两 构 件 组 成 转 动 副 时, 其 瞬 心 就 是 。 15.在 摆 动 导 杆 机 构 中, 当 导 杆 和 滑 块 的 相 对 运 动 为 动, 牵 连 运 动 为 动 时, 两 构 件 的 重 合 点 之 间 将 有 哥 氏 加 速 度。 哥 氏 加 速 度 的 大 小 为 ; 方 向 与 的 方 向 一 致。 16.相 对 运 动 瞬 心 是 相 对 运 动 两 构 件 上 为 零 的 重 合 点。 17.车 轮 在 地 面 上 纯 滚 动 并 以 常 速 v 前 进, 则 轮缘 上 K 点 的 绝 对 加 速 度 a a v l K K K KP ==n /2 。 - - - - - - - - - - - - - - - - - - - - - - - - - - - - - - - - - - - - - - -( ) 18.高 副 两 元 素 之 间 相 对 运 动 有 滚 动 和 滑 动 时, 其 瞬 心 就 在 两 元 素 的 接 触 点。- - - ( ) 19.在 图 示 机 构 中, 已 知ω1 及 机 构 尺 寸, 为 求 解C 2 点 的 加 速 度, 只 要 列 出 一 个 矢 量 方 程 r r r r a a a a C B C B C B 222222=++n t 就 可 以 用 图 解 法 将 a C 2求 出。- - - - - - - - - - - - - - - - - - ( ) 20.在 讨 论 杆2 和 杆3 上 的 瞬 时 重 合 点 的 速 度 和 加 速 度 关 系 时, 可 以 选 择 任 意 点 作 为 瞬 时 重 合 点。- - - - - - - - - - - - - - - - - - - - - - - - - - - - - - - - - - - - - - - - - - - - - - - - - ( ) 平面连杆机构优化设计 一、问题描述 平面连杆机构是由所有构件均由低副连接而成的机构,四杆机构是最常用的平面连杆机构。一般情况下,四杆机构只能近似实现给定的运动规律或运动轨迹,精确设计较为复杂。在四杆机构中,若两连架杆中的一个是曲柄,另一个是摇杆,则该机构为曲柄摇杆机构。曲柄摇杆机构可将曲柄的连续转动转变为摇杆的往复摆动。 设计一曲柄摇杆机构(如图1所示)。已知曲柄长度l 1=100mm ,机架长度l 4=500mm 。摇杆处于右极限位置时,曲柄与机架的夹角为φ0,摇杆与机架的夹角为ψ0。在曲柄转角φ从φ0匀速增至φ0+90°的过程中,要求摇杆转角()200π 32 ??ψψ-+ =。为防止从动件卡死,连杆与摇杆的夹角γ只允许在45°~135°范围内变化。 图1 机构运动简图 二、基本思路 四杆机构的设计要求可归纳为三类,即满足预定的连杆位置要求、满足预定的运动规律要求、满足预定的轨迹要求。本案例中,要求曲柄作等速转动时,摇杆的转角满足预定运动规律()00E π 32 ??ψψ-+ =。优化设计时,通常无精确解,一般采用数值方法得到近似解。本案例将机构预定的运动规律与实际运动规律观测量之间的偏差最小设为目标,由此建立优化设计数学模型,并运用MATLAB 优化工具箱的相关函数进行求解。 三、要点分析 优化设计数学模型的三要素包括设计变量、目标函数和约束条件。依次确定三要素后,编写程序进行计算。 1.设计变量的确定 通常将机构中的各杆长度,以及摇杆按预定运动规律运动时,曲柄所处的初始位置角φ0列为设计变量,即 T 04321T 54321)()(?l l l l x x x x x ==X (1) 考虑到机构各杆长按比例变化时,不会改变其运动规律,因此在计算可取l 1为单位长度,而其他杆长则按比例取为l 1的倍数。若曲柄的初始位置对应摇杆的右极限位置,则φ0及ψ0均为杆长的函数,即 4 212 32 42210)(2)(cos arc l l l l l l l +-++=?(2) 实现预定轨迹的平面四连杆机构的 数学建模及其优化设计 一.问题描述 设计一平面四连杆机构,如图1所示。要求曲柄在运动过程中实现运动轨迹 x y 2=,52< 为寻优目标,其偏差为i Mi i x x x -=?和i Mi i y y y -=?()n x i ,,2,1???=,如图2。为此,把摇杆运动区间2到5分成S 等分,M 点坐标有相应分点与之对应。将各分点标号记作i ,根据均方根差可建立其目标函数,即 ()()() [ ] min 2 /122 →-+-=∑i Mi i Mi y y x x X f ?sin 3L y Mi = ?cos 33?+=L x Mi i i x y ?=2 )1(3 1-+=i s x i ,S 为运动区间的分段数 ?? ??????--+=432 4 232212)(arccos L L L L L L ? 于是由以上表达式便构成了一个目标函数的数学表达式,对应于每一个机构设计方案(即给定21,X X ),即可计算出均方根差()X f 。 图 2 3.确定约束条件 根据设计条件,该机构的约束条件有两个方面:一是传递运动过程中的最小传动角γ应大于50度;二是保证四杆机构满足曲柄存在的条件。以此为基础建立优化线束条件。 ①保证传动角 50>γ 平面四杆机构的运动仿真模型分析 1前言 平面四杆机构是是平面连杆机构的基础,它虽然结构简单,但其承载能力大,而且同样能够实现多种运动轨迹曲线和运动规律,因而在工程实践中得到广泛应用。 平面四杆机构的运动分析, 就是对机构上某点的位移、轨迹、速度、加速度进行分析, 根据原动件的运动规律, 求解出从动件的运动规律。平面四杆机构的运动设计方法有很多,传统的有图解法、解析法和实验法。随着计算机技术的飞速发展,机构设计及运动分析已逐渐脱离传统方法,取而代之的是计算机仿真技术。本文在UG NX5环境下对平面四杆机构进行草图建模,通过草图中的尺寸约束、几何约束及动画尺寸等功能确定各连杆的尺寸,之后建立相应的连杆、运动副及运动驱动,对建立的运动模型进行运动学分析,给出构件上某点的运动轨迹及其速度和加速度变化规律曲线,文章最后简要分析几个应用于工程的平面四杆机构实例。 2平面四杆机构的建模 2.1问题的提出 平面四杆机构因其承载能力大,可以满足或近似满足很多的运动规律,所以其应用非常广泛,本文以基于曲柄摇杆机构的物料传送机构为例,讨论其建模及运动分析。 如图1所示,ABCD为曲柄摇杆机构,曲柄AB为主动件,机构在运动中要求连杆BC的延伸线上E点保持近似直线运动,其中直线轨迹为工作行程,圆弧轨迹为回程或空程,从而实现物料传送的功能。 2.2平面四杆机构的建模 由于物料传送机构为曲柄摇杆机构,所以它符合曲柄存在条件。根据机械原理课程中的应用实例[1],选取AB=100,BC=CD=CE=250,AD=200,单位均为毫米。 在UG NX5的Sketch环境里,创建如图2所示的草图,并作相应的尺寸约束和几何约束,其中EE'为通过E点的水平轨迹参考线,用以检验E点的工作行程运动轨迹。现通过草图里的尺寸动画功能,令AB与AD的夹角从0°到360°变化,可看到E点的变化轨迹为直线和圆弧,如图3所示为尺寸动画的四个截图,其中图3(a)中的E点为水平轨迹的起点,图3(b)中的E点为水平轨迹的中点,图3(c)中的E点为水平轨迹的终点,而图3(d)中的E点为圆弧轨迹(图中未画出)即回程的中点。 如E点轨迹不符合设计要求,则可适当调整各杆件的尺寸,再通过尺寸动画功能检验。 平面连杆机构的优化设计 【教学目标】 1.了解连杆机构优化设计的一般步骤 2.掌握连杆机构优化设计的方法 【教学重点】 1.掌握连杆机构优化设计的方法 【教学难点】 1.掌握连杆机构优化设计的方法 【教学准备】 多媒体课件、直尺、圆规。 【教学过程】 一、以工程实际案例引入课题 实例1:飞机起落架(结合最近美国波音飞机频繁失事的新闻) 实例2:汽车雨刮器 说明:平面连杆机构的实用在生产生活中随处可见,是机械设计当中常见的一种机构。 二、定义回顾 【提问】平面四杆机构的基本形式有哪些? 【预设】机械原理是本科第四学期的课程,学生可能记不全,要引导性地带大家回忆。 【答案】曲柄摇杆机构、双曲柄机构、双摇杆机构 三、回顾以前所学习的连杆机构设计方法,对比引入优化设计。 新课教授 一、曲柄摇杆机构再现已知运动规律的优化设计 1.设计变量的确定 决定机构尺寸的各杆长度,以及当摇杆按已知运动规律开始运动时,曲柄所处的位置角φ0 为设计变量。 [][] 1234512340T T x x x x x x l l l l ?== 考虑到机构的杆长按比例变化时,不会改变其运动规律,因此在计算时常l 1=1 , 而其他杆长按比例取为l 1 的倍数。 ()()22212430124arccos 2l l l l l l l ???++-=??+???? ()221243034arccos 2l l l l l l ψ??+--=?????? 经分析后,只有三个变量为独立的: [][] 123234T T x x x x l l l == 2.目标函数的建立 目标函数可根据已知的运动规律与机构实际运动规律之间的偏差最小为指标来建立,即 平面连杆机构的运动分析 以典型平面连杆机构(牛头刨床机构)为研究对象,首先进行机构的运动分析,并列出相应方程,然后采用计算机C语言编程的方法,计算出机构中选定点的位移、速度,并绘出相关数据图像。 标签: 连杆机构;位移;速度;计算机编程 TB 1 前言 平面连杆机构是现代机械中应用的最为广泛的一种典型机构。平面连杆机构的典型应用包括牛头刨床机构、缝纫机、颚式破碎机等。在研究平面连杆机构的过程中对机构上某个特定点的研究是必不可少的。然而在传统的研究方法中,手工计算不仅计算量大,而且极易出错。随着计算机技术的广泛普及,计算机逐渐成为分析研究典型机械结构的有力工具。因此本文力求通过C语言编程技术来对牛头刨床机构来进行简单运动分析。 2 牛头刨床机构运动分析 图1所示的为一牛头刨床。假设已知各构件的尺寸如表1所示,原动件1以匀角速度ω1=1rad/s沿着逆时针方向回转,试求各从动件的角位移、角速度和角加速度以及刨头C点的位移、速度的变化情况。 角速度变化较为平缓,保证刨头慢速、稳定工作;在220°~340°之间为回程阶段,角速度变化较快,以提高效率;4杆有4个角速度为0点,即4杆的速度方向改变了四次。 C点的位移、速度分析:在0°~200°范围内,C点位移曲线斜率的绝对值变化较小,说明此时C点速度及加速度的变化量不大,且保持在较小值。200°~260°范围内C点的速度变化量明显增大,由速度图像可以推知加速度在220°左右达到最大值后快速减小,并使其速度在260°左右达到最大,而后加速度反向缓慢增大,速度持续减小到零以后又开始反向增大。 ①工作行程为θ1:0°~220°,回程为θ1:220°~340 °;工作行程角度大于回程角度,工作效率较高; ②工作行程阶段,刨头C点位移的变化较为平稳,速度可以近似看为匀速, 案例3 平面连杆机构优化设计 一、问题描述 平面连杆机构是由所有构件均由低副连接而成的机构,四杆机构是最常用的平面连杆机构。一般情况下,四杆机构只能近似实现给定的运动规律或运动轨迹,精确设计较为复杂。在四杆机构中,若两连架杆中的一个是曲柄,另一个是摇杆,则该机构为曲柄摇杆机构。曲柄摇杆机构可将曲柄的连续转动转变为摇杆的往复摆动。 设计一曲柄摇杆机构(如图1所示)。已知曲柄长度l 1=100mm ,机架长度l 4=500mm 。摇杆处于右极限位置时,曲柄与机架的夹角为φ0,摇杆与机架的夹角为ψ0。在曲柄转角φ从φ0匀速增至φ0+90°的过程中,要求摇杆转角()200π 32 ??ψψ-+ =。为防止从动件卡死,连杆与摇杆的夹角γ只允许在45°~135°范围内变化。 图1 机构运动简图 二、基本思路 四杆机构的设计要求可归纳为三类,即满足预定的连杆位置要求、满足预定的运动规律要求、满足预定的轨迹要求。本案例中,要求曲柄作等速转动时,摇杆的转角满足预定运动规律()00E π 32 ??ψψ-+ =。优化设计时,通常无精确解,一般采用数值方法得到近似解。本案例将机构预定的运动规律与实际运动规律观测量之间的偏差最小设为目标,由此建立优化设计数学模型,并运用MA TLAB 优化工具箱的相关函数进行求解。 三、要点分析 优化设计数学模型的三要素包括设计变量、目标函数和约束条件。依次确定三要素后,编写程序进行计算。 1.设计变量的确定 通常将机构中的各杆长度,以及摇杆按预定运动规律运动时,曲柄所处的初始位置角φ0列为设计变量,即 T 04321T 54321)()(?l l l l x x x x x ==X (1) 考虑到机构各杆长按比例变化时,不会改变其运动规律,因此在计算可取l 1为单位长度,而其他杆长则按比例取为l 1的倍数。若曲柄的初始位置对应摇杆的右极限位置,则φ0及ψ0均为杆长的函数,即 4 212 32 42210)(2)(cos arc l l l l l l l +-++=? (2) 4 32 32 422102)(cos arc l l l l l l --+=ψ (3) 因此,设计变量缩减为3个独立变量,即 T 432T 321)()(l l l x x x ==X (4) 2.目标函数的建立 以机构预定的运动规律观测量ψE i 与实际运动规律观测量ψi 之间的偏差平方和最小为指标来建立目标函数,即 min )()(1 2E →-=∑=m i i i f ψψX (5) 式中,m 为输入角的等分数;ψE i 为预期输出角,ψE i=ψE (φi );ψi 为实际输出角。由图2可知: ? ? ?<≤+-<≤--=)π2π(π) π0(πi i i i i i i ?βα?βαψ (6) 32 22322arccos l l l i i i ρρα-+= (7) 42 12422arccos l l l i i i ρρβ-+= (8) i i l l l l ?ρcos 2412421-+= (9) 平面四杆机构的运动仿真模型分析1前言 平面四杆机构是是平面连杆机构的基础,它虽然结构简单,但其承载能力大,而且同样能够实现多种运动轨迹曲线和运动规律,因而在工程实践中得到广泛应用。 平面四杆机构的运动分析, 就是对机构上某点的位移、轨迹、速度、加速度进行分析, 根据原动件的运动规律, 求解出从动件的运动规律。平面四杆机构的运动设计方法有很多,传统的有图解法、解析法和实验法。随着计算机技术的飞速发展,机构设计及运动分析已逐渐脱离传统方法,取而代之的是计算机仿真技术。本文在UG NX5环境下对平面四杆机构进行草图建模,通过草图中的尺寸约束、几何约束及动画尺寸等功能确定各连杆的尺寸,之后建立相应的连杆、运动副及运动驱动,对建立的运动模型进行运动学分析,给出构件上某点的运动轨迹及其速度和加速度变化规律曲线,文章最后简要分析几个应用于工程的平面四杆机构实例。 2平面四杆机构的建模 问题的提出 平面四杆机构因其承载能力大,可以满足或近似满足很多的运动规律,所以其应用非常广泛,本文以基于曲柄摇杆机构的物料传送机构为例,讨论其建模及运动分析。 如图1所示,ABCD为曲柄摇杆机构,曲柄AB为主动件,机构在运动中要求连杆BC的延伸线上E 点保持近似直线运动,其中直线轨迹为工作行程,圆弧轨迹为回程或空程,从而实现物料传送的功能。 平面四杆机构的建模 由于物料传送机构为曲柄摇杆机构,所以它符合曲柄存在条件。根据机械原理课程中的应用实例[1],选取AB=100,BC=CD=CE=250,AD=200,单位均为毫米。 在UG NX5的Sketch环境里,创建如图2所示的草图,并作相应的尺寸约束和几何约束,其中EE'为通过E点的水平轨迹参考线,用以检验E点的工作行程运动轨迹。现通过草图里的尺寸动画功能,令AB与AD 的夹角从0°到360°变化,可看到E点的变化轨迹为直线和圆弧,如图3所示为尺寸动画的四个截图,其中图3(a)中的E点为水平轨迹的起点,图3(b)中的E点为水平轨迹的中点,图3(c)中的E点为水平轨迹的终点,而图3(d)中的E点为圆弧轨迹(图中未画出)即回程的中点。 一、填空题: 1.平面连杆机构是由一些刚性构件用低副连接组成的。 2.由四个构件通过低副联接而成的机构成为四杆机构。 3.在铰链四杆机构中,运动副全部是转动副。 4.在铰链四杆机构中,能作整周连续回转的连架杆称为曲柄。 5.在铰链四杆机构中,只能摆动的连架杆称为摇杆。 6.在铰链四杆机构中,与连架杆相连的构件称为连杆。 7.某些平面连杆机构具有急回特性。从动件的急回性质一般用行程速度变化系数表示。 8.对心曲柄滑快机构无急回特性。9.偏置曲柄滑快机构有急回特性。 10.对于原动件作匀速定轴转动,从动件相对机架作往复运动的连杆机构,是否有急回特性,取决于机构的极位夹角是否大于零。 11.机构处于死点时,其传动角等于0。12.机构的压力角越小对传动越有利。 13.曲柄滑快机构,当取滑块为原动件时,可能有死点。 14.机构处在死点时,其压力角等于90o。 15.平面连杆机构,至少需要4个构件。 二、判断题: 1.平面连杆机构中,至少有一个连杆。(√) 2.平面连杆机构中,最少需要三个构件。(×) 3.平面连杆机构可利用急回特性,缩短非生产时间,提高生产率。(√) 4.平面连杆机构中,极位夹角θ越大,K值越大,急回运动的性质也越显著。(√) 5.有死点的机构不能产生运动。(×) 6.机构的压力角越大,传力越费劲,传动效率越低。(√) 7.曲柄摇杆机构中,曲柄为最短杆。(√) 8.双曲柄机构中,曲柄一定是最短杆。(×) 9.平面连杆机构中,可利用飞轮的惯性,使机构通过死点位置。(√) 10.平面连杆机构中,压力角的余角称为传动角。(√) 11.机构运转时,压力角是变化的。(√) 三、选择题: 1.铰链四杆机构存在曲柄的必要条件是最短杆与最长杆长度之和 A 其他两杆之和。 A <=; B >=; C > 。 2.铰链四杆机构存在曲柄的必要条件是最短杆与最长杆长度之和小于或等于其他两杆之和,而充分条件是取 A 为机架。 A 最短杆或最短杆相邻边; B 最长杆; C 最短杆的对边。3.铰链四杆机构中,若最短杆与最长杆长度之和小于其余两杆长度之和,当以 B 为机架时,有两 毕业设计报告(论文) 报告(论文)题目:平面连杆机构运动及动力分析作者所在系部:机械工程系 作者所在专业:机械设计制造及其自动化 作者所在班级: B07115 作者姓名: 作者学号: 指导教师姓名: 完成时间: 2011年6月 北华航天工业学院教务处 摘要 平面连杆机构是一种应用十分广泛的机构。平面连杆机构全部采用低副连接,因而结构简单易于制造,结实耐用,不易磨损,适于高速重载;运动低副具有良好的匣形结构,无需保养,适于极度污染或腐蚀而易出现问题的机器中;平面连杆机构能够实现多种多样复杂的运动规律,而且结构的复杂性不一定随所需完成的运动规律性的复杂程度而增加;平面连杆机构还具有一个独特的优点,就是可调性,即通过改变机构中各杆件长度,从而方便地改变了原机构的运动规律和性能。连杆机构由于结构上的特点在各种机械行业中被广泛的采用。通过对连杆机构的设计,可以实现不同的运动规律,满足预定的位置要求和满足预定的轨迹要求。 机构运动及动力分析的目的是分析各个构件的位移、、角加速度以及受力,分析构件上某点的位置、轨迹、速度和加速度等。这种方法能给出各运动参数与机构尺寸间的解析关系及写出机构某些点的轨迹方程式,能帮助我们合理地选择机构的尺寸,从而对某一机构作深入的系统研究。 平面连杆机构运动及动力分析,就是以连杆机构作为研究对象,对其各个运动件之间的关系公式进行推导,应用现代设计理论方法和有关专业知识进行系统深入地分析和研究,探索掌握其运动规律,讨论重要参数间的关系。 关键词:平面连杆机构运动性能仿真运动规律 Abstract Planar linkage mechanisms are used widely. Planar linkage mechanisms take the use of lower pair connection, so its structure is easy to manufacture, durable and resistant, especially suitable for high-speed and heavy-duty; lower pair sports has a good box-shaped structure, without maintenance, which is fit for machines working in extreme contamination or often coming with problems because of corrosion; planar linkage mechanism not only can achieve a variety of complex movement, but also the more complex movem ent doesn’t go with more complex structure; what gives linkage a unique advantage is that the motive rules and performance of the original mechanism will change with the length of the bar. As a result, linkage mechanisms are widely used in mechanical industries. By changing the design of linkage mechanisms, it can achieve different motive rules in order to move as the intended location and trajectory. 1 前言 随着汽车工业制造技术的发展,对于汽车发动机的动力性能及可靠性要求越来越高,而连杆的强度、刚度对提高发动机的动力性及可靠性至关重要。因此,国内外各大汽车公司对发动机连杆的材料及制造技术的研究都非常重视。“小体积、大功率、低油耗”的高性能发动机对连杆提出更新、更高的要求: (1)作为高速运动件重量要轻,减小惯性力,降低能耗和噪声; (2)强度、刚度要高,并且要有较高的韧性; 这就意味着对连杆的设计和加工有着更高的要求。其一,杆身有足够的刚度可以预防工作时发生弯曲变形;其二,连杆的大端和连杆盖有足够的刚度,以防大端变形时连杆螺栓承受附加的弯曲应力和大端失圆,使轴承润滑破坏。同时,还要求连杆组具有足够的疲劳强度和冲击韧性。[3] 连杆的优化设计 2 连杆机构 2.1 连杆机构的特点 连杆机构具有以下传送特点: 1.连杆机构中的运动副一般均为低副(故又称其为低副机构,lower pair mechanism)。其运动副元素为面接触,压力较小,承载能力较大,润滑好,磨损小,加工制造容易,且连杆机构中的低副一般是几何封闭,对保证工作的可靠性有利。 2.在连杆机构中,在原动件的运动规律不变的条件下,可用改变各构件的相对长度来使从动件得到不同的运动规律。 3.在连杆机构中,连杆上的各点的轨迹是各种不同形状的曲线(称为连杆曲线,coupler-pointcurve),其形状随着各构件相对长度的改变而改变,故连杆曲线的形式多样,可用来满足一些特定工作的需要。 利用连杆机构还可很方便地达到改变运动的传递方向、扩大行程、实现增力和远距离传动等目的。 连杆机构也存在如下一些缺点: 1.由于连杆机构的运动必须经过中间构件进行传递,因而传动路线较长,易产生较大的误差累计,同时也使机械效率降低。 2.在连杆机构运动中,连杆及滑块所产生的惯性力难以用一般平衡方法加以消除,因而连杆机构不宜用于高速运动。 此外,虽然可以利用连杆机构来满足一些运动规律和运动轨迹的设计要求,但其设计十分繁难,且一般只能近似地满足。[5] 大作业(一) 平面连杆机构的运动分析 (题号:5-C) 班级:机制114 学号:2011012789 姓名:陈莎 同组其他人员:许龙飞张海洋 完成日期:2012.10.31 一.题目及原始数据; 二、牛头刨床机构的运动分析方程三.计算程序框图; 四.计算源程序; 五.计算结果; 六.运动线图及运动分析 七.参考书; 一、题目及原始数据; 图b 所示的为一牛头刨床(Ⅲ级机构)。假设已知各构件的尺寸如表2所示,原动件1以等角速度ω1=1rad/s 沿着逆时针方向回转,试求各从动件的角位移、角速度和角加速度以及刨头C 点的位移、速度和加速度的变化情况。 G b ) 表2 牛头刨床机构的尺寸参数(单位:mm ) 题 号 l AB l CD l DE h h 1 h 2 A B C 5-c 200 180 900 460 120 l CD =950 l CD =1020 l CD =980 要求:每三人一组,每人一个题目,每组中至少打印出一份源程序,每人计算出原动件从0゜~360゜时(N=36) 各运动变量的大小,并绘出各组对应的运动线图以 及E 点的轨迹曲线。 二、牛头刨床机构的运动分析方程 1)位置分析 建立封闭矢量多边形 由图可知 =3θ,故未知量有3θ、4θ、3S 、5S 。利用两个封闭图形ABDEA 和EDCGE , 建立两个封闭矢量方程,由此可得: A B C D E 2 1 3 4 5 6 h h 1 h 2 x y F F' 把(式Ⅰ)写成投影方程得:??? ? ??????????=+=-++=++=+h l l s l l l h s l l h s l 33445334411133441123344sin sin 0cos cos sin sin sin cos cos cos θθθθθθθθθθ(式Ⅱ) 由以上各式用型转化法可求得5343 s s θθ, 23θθ= 解: 211111 *cos *sin b b x h l y h l θθ=+?? =+? 44 44 *cos *sin d d x l y l θθ=?? =? 223()()d b d b s x x y y =-++ 3 sin b d x x s α-= 333 33)*sin *()/*cos *(/c d d b d c d d b d s x x l x l x x s y y l y l y y s αα=+=+-??? =+=+-?? 3tan c d c d y y x x θ-= - 5c s x = ()2212ae AE h h =+ 444 () tan *cos d c y h y l θθ+-= 高斯消去法求解 2.速度分析 对(式Ⅱ)求一次导数得: 44433333111444333331114443335444333*sin *s '*cos *sin **sin **cos *'*sin *cos **cos **sin **sin *'0*cos **cos *0l s l l s s l l l s l l θωθθωθωθωθθωθωθωθωθωθω-+-=-??++=? ? ---=? ?+=? (式Ⅲ) 矩阵式: 课程作业 曲柄摇杆优化设计 姓名:XX 学号:XXXXX 班级:XXXXX XX大学机械与动力学院 目录 1摘要 2问题研究 2.1问题重述 2.2问题分析 3数学模型的建立 3.1设计变量的确定 3.2目标函数的建立 3.3约束条件的确定 3.4标准数学模型 4使用MATLAB编程求解 4.1调用功能函数 4.2首先编写目标函数 M 文件 4.3编写非线性约束函数 M 文件 4.4编写非线性约束函数 M 文件 4.5运行结果 5结果分析 6结论推广 7过程反思 8个人小结 9参考文献 1. 1 摘要: 为分析机构能够满足给定的运动规律和运动空间的要求,运用Matlab 优化工具箱进行多约束条件下的连杆机构预定轨迹优化设计的方法,从而得到最接近给定运动规律的杆长条件,使机构的运动分析直观、简单和精确,提高了曲柄摇杆机构的设计精度和效率。 2 问题研究 2.1 问题重述 要求设计一曲柄摇杆机构,当曲柄由0?转到0?+90°时,摇杆的输出角实现如下给定的函数关系: 200)(32 ??π ψψ-+= 式中0?和0ψ分别为对应于摇杆在右极限位置时曲柄和摇杆的位置角,它们是机架杆l 4为原线逆时针度量的角度,见图1。 要求在该区间的运动过程中的最小传动角不得小于45°,即: ?=≥45][min γγ 通常把曲柄的长度当成单位长度,即l 1=1。另外,根据机构在机器中的许可空间,可以适当预选机架杆的长度,现取l 4 =5。 2.2 问题分析 设计时,可在给定最大和最小传动角的前提下,当曲柄从0?转到090??+时,要求摇杆的输出角最优地实现一个给定的运动规律()f ?。这里假设要求: ()()2 0023E f φ?φ??π ==+ - (1) 图1 曲柄摇杆机构简图 对于这样的设计问题,可以取机构的期望输出角()E f φ?=和实际输出角 ()F φ?=的平方误差之和作为目标函数,使得它的值达到最小。 在图 1 所示的曲柄摇杆机构中,1l 、2l 、3l 、 4l 分别是曲柄AB 、连杆BC 、摇杆CD 和机架AD 的长度。这里规定0?为摇杆在右极限位置0φ时的曲柄起始位置角,它们由1l 、2l 、3l 和4l 确定。 3 数学模型的建立matlab(四连杆优化设计)
平面连杆机构及其设计答案复习进程
实现预定轨迹的平面四连杆机构的优化设计
曲柄连杆机构运动学仿真
平面机构的运动分析习题和答案
平面连杆机构优化设计
机械基础-案例11实现预定轨迹的平面四连杆机构的优化设计
平面四杆机构的运动仿真模型分析
平面连杆机构的优化设计教案
平面连杆机构的运动分析
03平面连杆机构优化设计
平面四杆机构的运动仿真模型分析
平面连杆机构及其设计(参考答案)
平面连杆机构运动及动力分析
连杆的优化设计
平面连杆机构大作业
基于MATLAB的曲柄摇杆机构优化设计
相关主题
文本预览