伺服驱动器接线端子说明
备注:
伺服驱动器接线端子说明
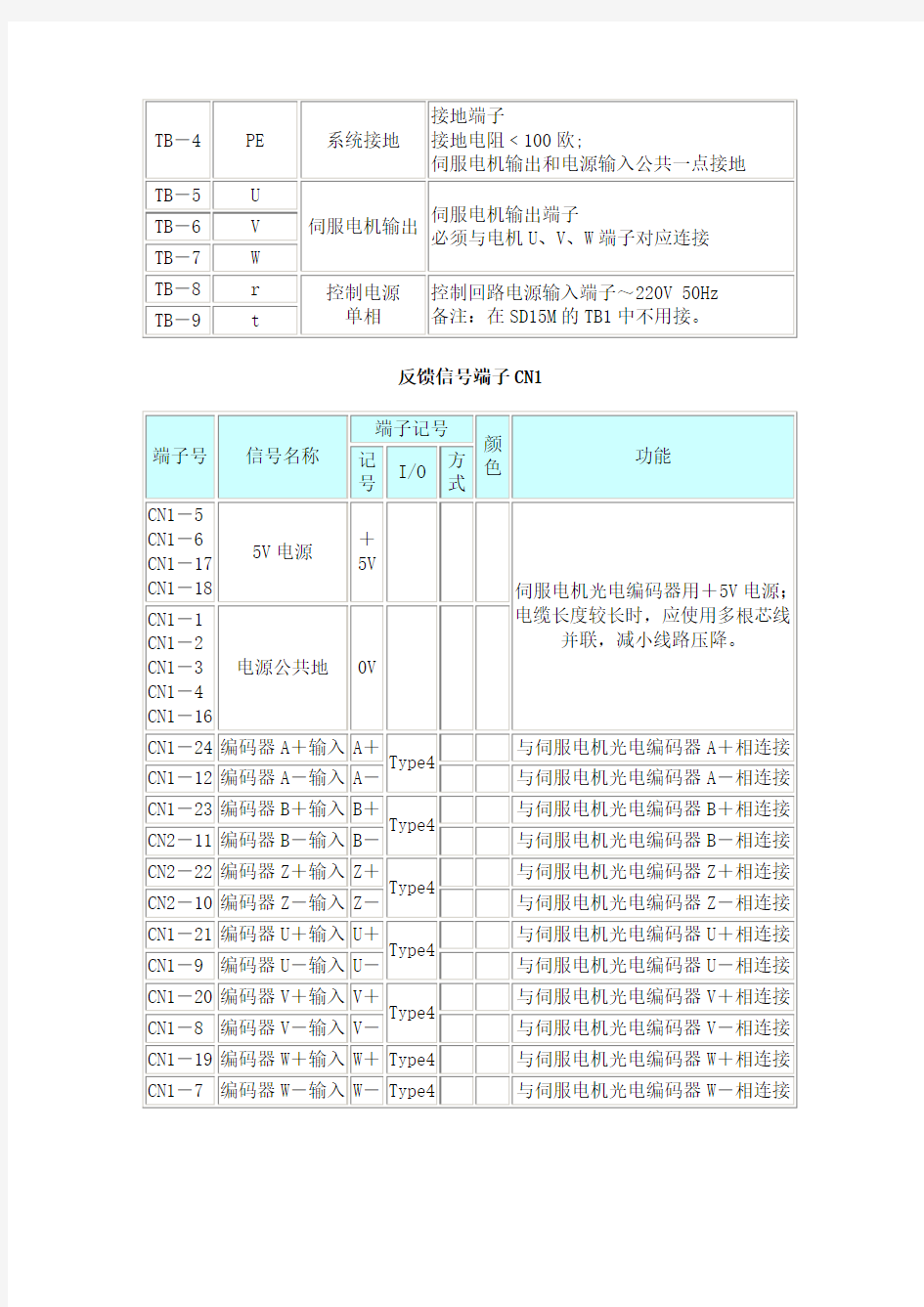
电源端子TB2
反馈信号端子CN1
控制信号输入/输出端子CN2
控制方式简称:P代表位置控制方式S代表模拟量速度控制方式
SD15M位置/模拟量控制方式标准接线
SD20MN/SD30MN/SD50MN/SD75MN位置/模拟量控制方式标准接线
相关标签:驱动器, 伺服驱动器,
一定要接线的有16 17 18 19 7 9 10
我下面给你介绍各东西的作用。用我理解的方式给你解释哦!写的通俗一点!呵呵- - !
伺服使能:伺服上电,使能后伺服电机就无法受外力转动了,位子就固定了,防止位置偏移!电机一定要使能后,才能运行。
控制方式:应该是指速度控制与位置控制之间的切换(一般不用)
位置禁止:我没看明白是什么,(一般不用)
正反限位:电机正转反转的限位,一般接传感器,用于机械限位的保护。不用可以直接短接。
定位完成:伺服电机定位完成后输出的一个信号
伺服报警:伺服报警时输出的一个信号
伺服准备好:指伺服电机正常无报警,并且使能后,输出的准备好信号
零点输出:指伺服编码器Z相信号输出,电机旋转一圈,发出一次。
公共端:指输出信号的公共端。
输出信号的接线:我不知道你这款伺服输出信号是否要串电源,你可以用万用表测量一下,一般为直流24V的电源。根据你使用情况,具体接线。你也可以全部都不用!
刹车输出:伺服电机有带刹车的,刹车盘的两根线接这里,不带刹车,就不要接了!编码器输出:就是伺服电机后面的编码器输出信号A B Z 三相差分信号,(一般不用)用于做闭环回路时使用。
脉冲方向信号输出:当做位置控制室,这个一定要接线!注意:这里输入信号为差分型信号!
模拟量信号输入:当做速度控制/力矩控制时使用,用于调节速度和力矩的大小!不知道我这样的解释能不能对您有所帮助。
如果有什么不清楚的,您再问我吧!
追问:
这位网的讲解很清楚,在这里先谢谢了!还有问题麻烦您指教一下,(1.2.3.5.6)是不是相当一个促发开关的作用?(编码器输出)是不是和plc链接作为闭环控制作用?(13.11)是不是10v的电源?
(分型信号)是不是指接通或断开信号?
追答:
1.2.3.5.6是驱动器状态的一个输出,是输出信号,可以接继电器!它内部是一个晶体管!
编码器输出你理解的没问题,就是做闭环用的一个反馈信号!
13 11不是10V电源,那个一个模拟量输入端子,是做速度控制或力矩控制时使用,用于调节速度和力矩的大小!
不是分型信号,是差分型信号,差分型信号不是接通,断开。接通断开时集电极信号!
富士伺服电机 富士伺服电机电子齿轮比计算: 伺服电机旋转1周时的机械系统移动量 131072脉冲/转 例如:电机旋转一圈的机械移动量等于单位量下,转一圈需2500脉冲 N α(分母) N 131072 β(分子) 2500 α(分母) 131072 32768 β(分子) 2500 625 I/O 信号接线 P24 1 24V 电源 19 24V cont1 2 激磁 *CA 8 脉冲 *CB 21 方向 M24 14 0V OUT1 17 报警 16 到位结束 编码器接线方式(smart 系统、w 系列、A5) 驱动器 电机端 P5 1 7 P5 M5 2 8 M5 SIG+ 5 5 SIG+ SIG- 6 4 SIG- BAT+ 3 1 BAT+ BAT- 4 2 BAT- GND 外壳 3 地线 旧版富士驱动器参数设置 新版富士驱动器参数设置 1# 16384(分子) 1# 0 2# 125(分母) 3# 0(脉冲+方向控制模式) 3# 0(脉冲+方向控制模式) 4# 1(方向) 4# 1(方向) 6# 65536(分子) 7# 15(刚性) 7# 125(分母) 19# 250 8# 15# 14(刚性) 松下伺服电机 松下A5 I/O 接线说明: 1、2、7 24V 36、41 0V × = = =
4 脉冲 6 方向 29 使能ON 37 报警 松下A5编码器接线说明: 驱动器马达 1 4 2 5 5 2 6 3 外壳 6(GND) 松下A5驱动器参数设置Pr0、** 0# 方向 1# 控制模式 0 7#指令脉冲形式 3 8#电机旋转一圈指令脉冲数 台达伺服电机 台达电子齿轮比计算公式: 马达转一圈脉冲数(F)=1、280、000÷分子(N)/分母(M) 台达编码器接线说明: 驱动器接头端马达端 5 1 4 4 14、16 7 13、16 8 屏蔽线 9 台达伺服电机I/O控制说明: 9 使能ON 28 报警 30 停止 37 方向 41 脉冲 35、1 24V 27、4、45、49 0V 5 定位结束 台达驱动器参数设定: P1-00 2(脉冲+方向) P1-44 分子(1280000) P1-45 分母(1000) P2-31 刚性 P2-32 增益调整方向 P2-19 105 P1-54 256(如马达转一圈1000脉冲设为256,表示偏差10个脉冲)
交流伺服电机的工作原理 伺服电机内部的转子是永磁铁,驱动器控制的U/V/W三相电形成电磁场,转子在此磁场的作用下转动,同时电机自带的编码器反馈信号给驱动器,驱动器根据反馈值与目标值进行比较,调整转子转动的角度。伺服电机的精度决定于编码器的精度(线数)。 什么是伺服电机?有几种类型?工作特点是什么? 答:伺服电动机又称执行电动机,在自动控制系统中,用作执行元件,把所收到的电信号转换成电动机轴上的角位移或角速度输出。分为直流和交流伺服电动机两大类,其主要特点是,当信号电压为零时无自转现象,转速随着转矩的增加而匀速下降。 交流伺服电机和无刷直流伺服电机在功能上有什么区别? 答:交流伺服要好一些,因为是正弦波控制,转矩脉动小。直流伺服是梯形波。但直流伺服比较简单,便宜。 永磁交流伺服电动机 20世纪80年代以来,随着集成电路、电力电子技术和交流可变速驱动技术的发展,永磁交流伺服驱动技术有了突出的发展,各国著名电气厂商相继推出各自的交流伺服电动机和伺服驱动器系列产品并不断完善和更新。交流伺服系统已成为当代高性能伺服系统的主要发展方向,使原来的直流伺服面临被淘汰的危机。90年代以后,世界各国已经商品化了的交流伺服系统是采用全数字控制的正弦波电动机伺服驱动。交流伺服驱动装置在传动领域的发展日新月异。永磁交流伺服电动机同直流伺服电动机比较,主要优点有: ⑴无电刷和换向器,因此工作可靠,对维护和保养要求低。 ⑵定子绕组散热比较方便。 ⑶惯量小,易于提高系统的快速性。 ⑷适应于高速大力矩工作状态。 ⑸同功率下有较小的体积和重量。 自从德国MANNESMANN的Rexroth公司的Indramat分部在1978年汉诺威贸易博览会上正式推出MAC永磁交流伺服电动机和驱动系统,这标志着此种新一代交流伺服技术已进入实用化阶段。到20世纪80年代中后期,各公司都已有完整的系列产品。整个伺服装置市场都转向了交流系统。早期的模拟系统在诸如零漂、抗干扰、可靠性、精度和柔性等方面存在不足,尚不能完全满足运动控制的要求,近年来随着微处理器、新型数字信号处理器(DSP)的应用,出现了数字控制系统,控制部分可完全由软件进行的永磁交流伺服系统。 日本安川电机制作所推出的小型交流伺服电动机和驱动器,其中D系列适用于数控机床(最高转速为1000r/min,力矩为0.25~2.8N.m),R系列适用于机器人(最高转速为3000r/min,力矩为0.016~0.16N.m)。之后又推出M、F、S、H、C、G 六个系列。20世纪90年代先后推出了新的D系列和R系列。由旧系列矩形波驱动、8051单片机控制改为正弦
PLC控制伺服电机应用实例,写出组成整个系统的PLC模块及外围器件,并附相关程序。 PLC品牌不限。 以松下FP1系列PLC和A4系列伺服驱动为例,编制控制伺服电机定长正、反旋转的PLC程序并设计外围接线图,此方案不采用松下的位置控制模块FPG--PP11\12\21\22等,而是用晶体管输出式的PLC,让其特定输出点给出位置指令脉冲串,直接发送到伺服输入端,此时松下A4伺服工作在位置模式。在PLC 程序中设定伺服电机旋转速度,单位为(rpm),设伺服电机设定为1000个脉冲转一圈。PLC输出脉冲频率=(速度设定值/6)*100(HZ)。假设该伺服系统的驱动直线定位精度为±0.1mm,伺服电机每转一圈滚珠丝杠副移动10mm,伺服电机转一圈需要的脉冲数为1000,故该系统的脉冲当量或者说驱动分辨率为0.01mm(一个丝);PLC输出脉冲数=长度设定值*10。 以上的结论是在伺服电机参数设定完的基础上得出的。也就是说,在计算PLC发出脉冲频率与脉冲前,先根据机械条件,综合考虑精度与速度要求设定好伺服电机的电子齿轮比!大致过程如下: 机械机构确定后,伺服电机转动一圈的行走长度已经固定(如上面所说的10mm),设计要求的定位精度为0.1mm(10个丝)。为了保证此精度,一般情况下是让一个脉冲的行走长度低于0.1mm,如设定一个脉冲的行走长度为如上所述的0.01mm,于是电机转一圈所需要脉冲数即为1000个脉冲。此种设定当电机速度要求为1200转/分时,PLC应该发出的脉冲频率为20K。松下FP1---40T 的PLC的CPU本体可以发脉冲频率为50KHz,完全可以满足要求。 如果电机转动一圈为100mm,设定一个脉冲行走仍然是0.01mm,电机转一圈所需要脉冲数即为10000 个脉冲,电机速度为1200转时所需要脉冲频率就是200K。PLC的CPU输出点工作频率就不够了。需要位置控制专用模块等方式。 有了以上频率与脉冲数的算法就只需应用PLC的相应脉冲指令发出脉冲即可实现控制了。假设使用松下 A4伺服,其工作在位置模式,伺服电机参数设置与接线方式如下: 一、按照伺服电机驱动器说明书上的“位置控制模式控制信号接线图”接线: pin3(PULS1),pin4(PULS2)为脉冲信号端子,PULS1连接直流电源正极(24V电源需串连2K左右的电阻),PULS2连接控制器(如PLC的输出端子)。 pin5(SIGN1),pin6(SIGN2)为控制方向信号端子,SIGN1连接直流电源正极(24V电源需串连2K左右的电阻),SIGN2连接控制器(如PLC的输出端子)。当此端子接收信号变化时,伺服电机的运转方向改变。实际运转方向由伺服电机驱动器的P41,P42这两个参数控制,pin7(com+)与外接24V直流电源的正极相连。pin29(SRV-0N),伺服使能信号,此端子与外接24V直流电源的负极相连,则伺服电机进入使能状态,通俗地讲就是伺服电机已经准备好,接收脉冲即可以运转。 上面所述的六根线连接完毕(电源、编码器、电机线当然不能忘),伺服电机即可根据控制器发出的脉冲与方向信号运转。其他的信号端子,如伺服报警、偏差计数清零、定位完成等可根据您的要求接入控制器构成更完善的控制系统。
伺服驱动器的工作原理 随着全数字式交流伺服系统的出现,交流伺服电机也越来越多地应用于数字控制系统中。为了适应数字控制的发展趋势,运动控制系统中大多采用全数字式交流伺服电机作为执行电动机。在控制方式上用脉冲串和方向信号实现。 一般伺服都有三种控制方式:速度控制方式,转矩控制方式,位置控制方式。 速度控制和转矩控制都是用模拟量来控制的。位置控制是通过发脉冲来控制的。具体采用什么控制方式要根据客户的要求,满足何种运动功能来选择。 如果您对电机的速度、位置都没有要求,只要输出一个恒转矩,当然是用转矩模式。 如果对位置和速度有一定的精度要求,而对实时转矩不是很关心,用转矩模式不太方便,用速度或位置模式比较好。如果上位控制器有比较好的死循环控制功能,用速度控制效果会好一点。如果本身要求不是很高,或者,基本没有实时性的要求,用位置控制方式对上位控制器没有很高的要求。就伺服驱动器的响应速度来看,转矩模式运算量最小,驱动器对控制信号的响应最快;位置模式运算量最大,驱动器对控制信号的响应最慢。 对运动中的动态性能有比较高的要求时,需要实时对电机进行调整。那么如果控制器本身的运算速度很慢(比如PLC,或低端运动控制器),就用位置方式控制。如果控制器运算速度比较快,可以用速度
方式,把位置环从驱动器移到控制器上,减少驱动器的工作量,提高效率(比如大部分中高端运动控制器);如果有更好的上位控制器,还可以用转矩方式控制,把速度环也从驱动器上移开,这一般只是高端专用控制器才能这么干,而且,这时完全不需要使用伺服电机。换一种说法是: 1、转矩控制:转矩控制方式是通过外部模拟量的输入或直接的地址的赋值来设定电机轴对外的输出转矩的大小,具体表现为例如10V 对应5Nm的话,当外部模拟量设定为5V时电机轴输出为2.5Nm:如果电机轴负载低于2.5Nm时电机正转,外部负载等于2.5Nm时电机不转,大于2.5Nm时电机反转(通常在有重力负载情况下产生)。可以通过实时的改变模拟量的设定来改变设定的力矩大小,也可通过通讯方式改变对应的地址的数值来实现。应用主要在对材质的受力有严格要求的缠绕和放卷的装置中,例如饶线装置或拉光纤设备,转矩的设定要根据缠绕的半径的变化随时更改以确保材质的受力不会随着缠绕半径的变化而改变。 2、位置控制:位置控制模式一般是通过外部输入的脉冲的频率来确定转动速度的大小,通过脉冲的个数来确定转动的角度,也有些伺服可以通过通讯方式直接对速度和位移进行赋值。由于位置模式可以对速度和位置都有很严格的控制,所以一般应用于定位装置。应用领域如数控机床、印刷机械等等。 3、速度模式:通过模拟量的输入或脉冲的频率都可以进行转动速度的控制,在有上位控制装置的外环PID控制时速度模式也可以进行
伺服电机的调试步骤 1、初始化参数 在接线之前,先初始化参数。在控制卡上:选好控制方式;将PID参数清零;让控制卡上电时默认使能信号关闭;将此状态保存,确保控制卡再次上电时即为此状态。在伺服电机上:设置控制方式;设置使能由外部控制;编码器信号输出的齿轮比;设置控制信号与电机转速的比例关系。一般来说,建议使伺服工作中的最大设计转速对应9V的控制电压。比如,松下是设置1V电压对应的转速,出厂值为500,如果你只准备让电机在1000转以下工作,那么,将这个参数设置为111。 2、接线 将控制卡断电,连接控制卡与伺服之间的信号线。以下的线是必须要接的:控制卡的模拟量输出线、使能信号线、伺服输出的编码器信号线。复查接线没有错误后,电机和控制卡(以及PC)上电。此时电机应该不动,而且可以用外力轻松转动,如果不是这样,检查使能信号的设置与接线。用外力转动电机,检查控制卡是否可以正确检测到电机位置的变化,否则检查编码器信号的接线和设置3、试方向 对于一个闭环控制系统,如果反馈信号的方向不正确,后果肯定是灾难性的。通过控制卡打开伺服的使能信号。这是伺服应该以一个较低的速度转动,这就是传说中的“零漂”。一般控制卡上都会有抑制零漂的指令或参数。使用这个指令或参数,看电机的转速和方向是否可以通过这个指令(参数)控制。如果不能控制,检查模拟量接线及控制方式的参数设置。确认给出正数,电机正转,编码器计数增加;给出负数,电机反转转,编码器计数减小。如果电机带有负载,行程有限,不要采用这种方式。测试不要给过大的电压,建议在1V以下。如果方向不一致,可以修改控制卡或电机上的参数,使其一致。 4、抑制零漂 在闭环控制过程中,零漂的存在会对控制效果有一定的影响,最好将其抑制住。使用控制卡或伺服上抑制零飘的参数,仔细调整,使电机的转速趋近于零。由于零漂本身也有一定的随机性,所以,不必要求电机转速绝对为零。 5、建立闭环控制 再次通过控制卡将伺服使能信号放开,在控制卡上输入一个较小的比例增益,至于多大算较小,这只能凭感觉了,如果实在不放心,就输入控制卡能允许的最小值。将控制卡和伺服的使能信号打开。这时,电机应该已经能够按照运动指令大致做出动作了。 6、调整闭环参数 细调控制参数,确保电机按照控制卡的指令运动,这是必须要做的工作,而这部分工作,更多的是经验,这里只能从略了。
伺服驱动器的工作原理 。速度控制和转矩控制都是用模拟量来控制的。位置控制是通过发脉冲来控制的。具体采用什么控制方式要根据客户的要求,满足何种运动功能来选择。如果您对电机的速度、位置都没有要求,只要输出一个恒转矩,当然是用转矩模式。如果对位置和速度有一定的精度要求,而对实时转矩不是很关心,用转矩模式不太方便,用速度或位置模式比较好。如果上位控制器有比较好的死循环控制功能,用速度控制效果会好一点。如果本身要求不是很高,或者,基本没有实时性的要求,用位置控制方式对上位控制器没有很高的要求。就伺服驱动器的响应速度来看,转矩模式运算量最小,驱动器对控制信号的响应最快;位置模式运算量最大,驱动器对控制信号的响应最慢。对运动中的动态性能有比较高的要求时,需要实时对电机进行调整。那么如果控制器本身的运算速度很慢(比如PLC,或低端运动控制器),就用位置方式控制。如果控制器运算速度比较快,可以用速度方式,把位置环从驱动器移到控制器上,减少驱动器的工作量,提高效率(比如大部分中高端运动控制器);如果有更好的上位控制器,还可以用转矩方式控制,把速度环也从驱动器上移开,这一般只是高端专用控制器才能这么干,而且,这时完全不需要使用伺服电机。换一种说法是:
1、转矩控制:转矩控制方式是通过外部模拟量的输入或直接的地址的赋值来设定电机轴对外的输出转矩的大小,具体表现为例如10V对应5Nm的话,当外部模拟量设定为5V时电机轴输出为 2、5Nm:如果电机轴负载低于 2、5Nm时电机正转,外部负载等于 2、5Nm时电机不转,大于 2、5Nm时电机反转(通常在有重力负载情况下产生)。可以通过实时的改变模拟量的设定来改变设定的力矩大小,也可通过通讯方式改变对应的地址的数值来实现。应用主要在对材质的受力有严格要求的缠绕和放卷的装置中,例如饶线装置或拉光纤设备,转矩的设定要根据缠绕的半径的变化随时更改以确保材质的受力不会随着缠绕半径的变化而改变。 2、位置控制:位置控制模式一般是通过外部输入的脉冲的频率来确定转动速度的大小,通过脉冲的个数来确定转动的角度,也有些伺服可以通过通讯方式直接对速度和位移进行赋值。由于位置模式可以对速度和位置都有很严格的控制,所以一般应用于定位装置。应用领域如数控机床、印刷机械等等。 3、速度模式:通过模拟量的输入或脉冲的频率都可以进行转动速度的控制,在有上位控制装置的外环PID控制时速度模式也可以进行定位,但必须把电机的位置信号或直接负载的位置信号给上位回馈以做运算用。位置模式也支持直接负载外环检测位置信号,此时的电机轴端的编码器只检测电机转速,位置信号就由
一、伺服驱动器外部接线及说明。 SRV-CTRL PLC 外部电源 (DC 24V) SRV-CTRL 说明: 1、SRV-CTRL指PLC的伺服控制模块; 2、以→指向者为输入,以←指向者为输出。 3、各信号含义如下: INH: 禁止输入脉冲指令(开路时禁止);OZ-: Z相输出;OZ+: Z相输出; S-RDY: 伺服驱动器已准备就绪;ALM: 伺服驱动器故障报警; COIN: 定位已完成;SRV-ON: 伺服驱动器“开”信号; COM-: 电源负极;COM+: 电源正极; PULS1: 指令脉冲输入端; PULS2: 指令脉冲输入端; SIGN1: 指令脉冲符号输入端; SIGN2: 指令脉冲符号输入端; 二、参数说明: 1、参数设置方法。
操作面板上共有5个按键,意义如下: MODE:模式转换键,按此键可在4个模式间切换,这4个模式是: DP-××××: 选择监视项目(共有7个, 在按 MODE键显示DP-××××后先按SET,再按↑或↓选择) ⑴、DP-EPS: 位置偏差;⑵、DP-SPD: 转速; ⑶、DP-TRQ: 转矩;⑷、DP-CNT: 控制方式; ⑸、DP-IO: 输入输出信号状态;⑹、DP-ERR: 错误信息; ⑺、DP_NO: PR-××××: 设定参数。 EE-××××: 写入参数。 AT-××××: 自动增益调整。 SET:为设定及确认键。 ↑:数值增加或移动到下一个选项; ↓:数值减少或移动到上一个选项; ←:数位间移动; 具体设置步骤详见有关Drive r的补充信息
说明: 1、参数号码后加“#“者为需要更改的,如02号参数实际应用中应设为 0; 2、控制方式含义 T:转矩控制 S:速度控制 P:位置控制 3、出厂设定为”*”者为出厂时未设置,需根据实际自行设置; 4、其余参数可使用出厂设置; 5、最后一栏为新Driver与之对应的参数(有些没有); 6、更详细的说明参见Driver手册(旧)或参考Driver手册(新)中对 应的参数; 7、以下表格为Driver实际参数设置表。
伺服电机工作原理图 伺服电机工作原理——伺服电机内部的转子是永磁铁,驱动器控制的U/V/W三相电形成电磁场,转子在此磁场的作用下转动,同时电机自带的编码器反馈信号给驱动器,驱动器根据反馈值与目标值进行比较,调整转子转动的角度。 永磁交流伺服系统具有以下等优点:(1)电动机无电刷和换向器,工作可靠,维护和保养简单;(2)定子绕组散热快;(3)惯量小,易提高系统的快速性;(4)适应于高速大力矩工作状态;(5)相同功率下,体积和重量较小,广泛的应用于机床、机械设备、搬运机构、印刷设备、装配机器人、加工机械、高速卷绕机、纺织机械等场合,满足了传动领域的发展需求。 永磁交流伺服系统的驱动器经历了模拟式、模式混合式的发展后,目前已经进入了全数字的时代。全数字伺服驱动器不仅克服了模拟式伺服的分散性大、零漂、低可靠性等确定,还充分发挥了数字控制在控制精度上的优势和控制方法的灵活,使伺服驱动器不仅结构简单,而且性能更加的可靠。现在,高性能的伺服系统,大多数采用永磁交流伺服系统其中包括永磁同步交流伺服电动机和全数字交流永磁同步伺服驱动器两部分。伺服驱动器有两部分组成:驱动器硬件和控制算法。控制算法是决定交流伺服系统性能好坏的关键技术之一,是国外交流伺服技术封锁的主要部分,也是在技术垄断的核心。 2 交流永磁伺服系统的基本结构 交流永磁同步伺服驱动器主要有伺服控制单元、功率驱动单元、通讯接口单元、伺服电动机及相应的反馈检测器件组成,其结构组成如图1所示。其中伺服控制单元包括位置控制器、速度控制器、转矩和电流控制器等等。我们的交流永磁同步驱动器其集先进的控制技术和控制策略为一体,使其非常适用于高精度、高性能要求的伺服驱动领域,还体现了强大的智能化、柔性化是传统的驱动系统所不可比拟的。 目前主流的伺服驱动器均采用数字信号处理器(DSP)作为控制核心,其优点是可以实现比较复杂的控制算法,事项数字化、网络化和智能化。功率器件普遍采用以智能功率模块(IPM)为核心设计的驱动电路,IPM内部集成了驱动电路,同时具有过电压、过电流、过热、欠压等故障检测保护电路,在主回路中还加入软启动电路,以减小启动过程对驱动器的冲击。
富士伺服电机 富士伺服电机电子齿轮比计算: 伺服电机旋转1周时的机械系统移动量 131072脉冲/转 命令脉冲补偿β 例如:电机旋转一圈的机械移动量等于单位量下,转一圈需2500脉冲 N α(分母) N 131072 β(分子) 2500 α(分母) 131072 32768 β(分子) 2500 625 I/O 信号接线 P24 1 24V 电源 19 24V cont1 2 激磁 *CA 8 脉冲 *CB 21 方向 M24 14 0V OUT1 17 报警 16 到位结束 编码器接线方式(smart 系统、w 系列、A5) 驱动器 电机端 P5 1 7 P5 M5 2 8 M5 × = = =
SIG+55SIG+ SIG-64SIG- BAT+31BAT+ BAT-42BAT- GND外壳3地线 旧版富士驱动器参数设置新版富士驱动器参数设置 1# 16384(分子) 1# 0 2# 125(分母) 3# 0(脉冲+方向控制模式)3# 0(脉冲+方向控制模式) 4# 1(方向) 4# 1(方向) 6# 65536(分子) 7# 15(刚性) 7# 125(分母) 19# 250 8# 15# 14(刚性) 松下伺服电机 松下A5 I/O接线说明: 1、2、7 24V 36、41 0V 4 脉冲 6 方向 29 使能ON 37 报警 松下A5编码器接线说明: 驱动器马达 14
25 5 2 6 3 外壳 6(GND) 松下A5驱动器参数设置Pr0.** 0# 方向 1# 控制模式 0 7#指令脉冲形式 3 8#电机旋转一圈指令脉冲数 台达伺服电机台达电子齿轮比计算公式: 马达转一圈脉冲数(F)=分子(N)/分母(M) 台达编码器接线说明:
伺服电机驱动器的工作原理 伺服驱动器又称为“伺服控制器”、“伺服放大器”,是用来控制伺服电机的一种控制器,其作用类似于变频器作用于普通交流马达,属于伺服系统的一部分,主要应用于高精度的定位系统。一般是通过位置、速度和力矩三种方式对伺服马达进行控制,实现高精度的传动系统定位,目前是传动技术的高端产品。 伺服进给系统的要求 1、调速范围宽 2、定位精度高 3、有足够的传动刚性和高的速度稳定性 4、快速响应,无超调 为了保证生产率和加工质量,除了要求有较高的定位精度外,还要求有良好的快速响应特性,即要求跟踪指令信号的响应要快,因为数控系统在启动、制动时,要求加、减加速度足够大,缩短进给系统的过渡过程时间,减小轮廓过渡误差。 5、低速大转矩,过载能力强 一般来说,伺服驱动器具有数分钟甚至半小时内1.5倍以上的过载能力,在短时间内可以过载4~6倍而不损坏。 6、可靠性高 要求数控机床的进给驱动系统可靠性高、工作稳定性好,具有较强的温度、湿度、振动等环境适应能力和很强的抗干扰的能力。 对电机的要求 1、从最低速到最高速电机都能平稳运转,转矩波动要小,尤其在低速如0.1r/min或更低速时,仍有平稳的速度而无爬行现象。 2、电机应具有大的较长时间的过载能力,以满足低速大转矩的要求。一般直流伺服电机要求在数分钟内过载4~6倍而不损坏。 3、为了满足快速响应的要求,电机应有较小的转动惯量和大的堵转转矩,并具有尽可能小的时间常数和启动电压。 4、电机应能承受频繁启、制动和反转。 常州丰迪电气有限公司是一家专业生产三相步进电机、交流伺服电机、三相伺服电机、伺服电机驱动器、步进电机驱动器的企业,产品主要用于各类数控机床、医疗机械、包装机械、纺织机械等自动化控制领域。公司技术力量雄厚,生产工艺精湛,电机全部采用优质材料,技术性能和质量指标达到国内同类产品的领先水平,丰迪始终以诚信、共赢的经营宗旨立足于市场。下面就由丰迪电气讲述下伺服电机驱动器的工作原理。 目前主流的伺服驱动器均采用数字信号处理器(DSP)作为控制核心,可以实现比较复杂的控制算法,实现数字化、网络化和智能化。功率器件普遍采用以智能功率模块(IPM)为核心设计的驱动电路,IPM内部集成了驱动电路,同时具有过电压、过电流、过热、欠压等故障检测保护电路,在主回路中还加入软启动电路,以减小启动过程对驱动器的冲击。功率驱动单元首先通过三相全桥整流电路对输入的三相电或者市电进行整流,得到相应的直流电。经过整流好的三相电或市电,再通过三相正弦PWM电压型逆变器变频来驱动三相永磁式同步交流伺服电机。功率驱动单元的整个过程可以简单的说就是AC-DC-AC的过程。整流单元(AC-DC)主要的拓扑电路是三相全桥不控整流电路。 随着伺服系统的大规模应用,伺服驱动器使用、伺服驱动器调试、伺服驱动器维修都是伺服驱动器在当今比较重要的技术课题,越来越多工控技术服务商对伺服驱动器进行了技术深层次研究。
伺服电机的PLC控制方法 以我司KSDG系列伺服驱动器为例,介绍PLC控制伺服电机的方法。 伺服电机有三种控制模式:速度控制,位置控制,转矩控制{由伺服电机驱动器的Pr02参数与32(C-MODE)端子状态选择},本文简要介绍位置模式的控制方法 一、按照伺服电机驱动器说明书上的"位置控制模式控制信号接线图"连接导线3(PULS1), 4(PULS2)为脉冲信号端子,PULS1连接直流电源正极(24V电源需串连2K左右的电阻),PULS2连接控制器(如PLC的输出端子)。5(SIGN1),6(SIGN2)为控制方向信号端子,SIGN1连接直流电源正极(24V电源需串连2K左右的电阻),SIGN2连接控制器(如PLC的输出端子)。当此端子接收信号变化时,伺服电机的运转方向改变。实际运转方向由伺服电机驱动器的P41,P42这两个参数控制。7(com+)与外接24V直流电源的正极相连。29(SRV-0N),伺服使能信号,此端子与外接24V 直流电源的负极相连,则伺服电机进入使能状态,通俗地讲就是伺服电机已经准备好,接收脉冲即可以运转。上面所述的六根线连接完毕(电源、编码器、电机线当然不能忘),伺服电机即可根据控制器发出的脉冲与方向信号运转。其他的信号端子,如伺服报警、偏差计数清零、定位完成等可根据您的要求接入控制器构成更完善的控制系统。 二、设置伺服电机驱动器的参数。 1、Pr02----控制模式选择,设定Pr02参数为0或是3或是4。3与4的区别在于当32(C-MODE)端子为短路时,控制模式相应变为速度模式或是转矩模式,而设为0,则只为位置控制模式。如果您只要求位置控制的话,Pr02设定为0或是3或是4是一样的。 2、Pr10,Pr11,Pr12----增益与积分调整,在运行中根据伺服电机的运行情况相应调整,达到伺服电机运行平稳。当然其他的参数也需要调整(Pr13,Pr14,Pr15,Pr16,Pr20也是很重要的参数),在您不太熟悉前只调整这三个参数也可以满足基本的要求. 3、Pr40----指令脉冲输入选择,默认为光耦输入(设为0)即可。也就是选择3(PULS1),4(PULS2),5(SIGN1),6(SIGN2)这四个端子输入脉冲与方向信号。 4、Pr41,Pr42----简单地说就是控制伺服电机运转方向。Pr41设为0时,Pr42设为3,则5(SIGN1),6(SIGN2)导通时为正方向(CCW),反之为反方向(CW)。Pr41设为1时,Pr42设为3,则5(SIGN1),6(SIGN2)断开时为正方向(CCW),反之为反方向(CW)。(正、反方向是相对的,看您如何定义了,正确的说法应该为CCW,CW). 5、Pr46,Pr4A,Pr4B----电子齿轮比设定。此为重要参数,其作用就是控制电机的运转速度与控制器发送一个脉冲时电机的行走长度。其公式为:伺服电机每转一圈所需的脉冲数=编码器分辨率×Pr4B/(Pr46×2^Pr4A)伺服电机所配编码器如果为:2500p/r5线制增量式编码器,则编码器分辨率为10000p/r如您连接伺服电机轴的丝杆间距为20mm,您要做到控制器发送一个脉冲伺服电机行走长度为一个丝(0.01mm)。 计算得知:伺服电机转一圈需要2000个脉冲。(每转一圈所需脉冲确定了,脉冲频率与伺服电机的速度的关系也就确定了)三个参数可以设定为:Pr4A=0,Pr46=10000,Pr4B=2000,约分一下则为:Pr4A=0,Pr46=100,Pr4B=20。从上面的叙述可知:设定Pr46,Pr4A,Pr4B这三个参数是根据我们控制器所能发送的最大脉冲频率与工艺所要求的精度。在控制器的最大发送脉冲频率确定后,工艺精度要求越高,则伺服电机能达到的最大速度越低。做好上面的工作,编制好PLC程序,我们就可以控制伺服运转了。
松下伺服电机接线总结 伺服驱动器型号:MDDHT5540 伺服电机型号:MSME152G1H 运动控制卡型号:PCI-1240 1、主电路 工作原理:按下空气开关MCCB后,控制电路L1C、L2C先得电。此时ALM+引脚有输出,ALM回路控制的回路接通,ALM回路的继电器控制的开关ALM 闭合。软件开关通过程序控制主电路的通断,正常运行情况下一直运行。此时只要按下开始按钮ON,电磁接触器线圈主电路瞬间接通,电磁接触器线圈MC得电后,使电磁接触器控制的开关MC闭合,此时即使开始按钮ON断开,由于电路的自锁作用,主电路仍然接通。 2、脉冲发送电路
接线根据: 运动控制卡PCI-1240给出的控制卡功能模块图如下图所示 由图可知,运动控制卡输出脉冲的方式为长线驱动方式。 松电机下伺服使用手册中P3-35(P151)中提到长线驱动接线端子说明如下图 手册P3-18(P134)给出的长线驱动接线方法如下图
3、编码器反馈脉冲接收电路 接线原理:关于利用伺服驱动器输出的ABZ相脉冲计算伺服电机的旋转角度(参考 网址:http://bbs.gongkong1/Details/201910/2019103112034201901-1.shtml)推荐做法:先将OA、OB脉冲四倍频(类似于DSP的QEP计数模块),具体实现的时候只需要记住OA、OB的每个脉冲跳变即可实现四倍频,同时要辩相,一般我们定义OA超前OB为电机旋转正方向,此时脉冲累加,否则为负方向,脉冲累减。知道了脉冲个数就好办了,如果松下伺服输出的脉冲个数为一圈2500个,由于我们四倍频了,故实际到我们这里就应该是10000个没圈,根据这个脉冲你就可以知道电机的相对位置。根据OC信号,你可以知道电机的绝对位置,一般定义OC出现的时刻就是电机转子的零位,因此每次检测到OC出现,就应该认为绝对位置出现,这样可以清除累积误差。根据收到的脉冲数,采用M法测速也可以计算出实际电机的转速。 接线根据: 伺服驱动器说明书P3-32(P148)给出的接线说明
创作编号:BG7531400019813488897SX 创作者:别如克* 伺服电机内部结构
伺服电机工作原理
伺服电机原理 一、交流伺服电动机 交流伺服电动机定子的构造基本上与电容分相式单相异步电动机相似.其定子上装有两个位置互差90°的绕组,一个是励磁绕组Rf,它始终接在交流电压Uf上;另一个是控制绕组L,联接控制信号电压Uc。所以交流伺服电动机又称两个伺服电动机。 交流伺服电动机的转子通常做成鼠笼式,但为了使伺服电动机具有较宽的调速范围、线性的机械特性,无“自转”现象和快速响应的性能,它与普通电动机相比,应具有转子电阻大和转动惯量小这两个特点。目前应用较多的转子结构有两种形式:一种是采用高电阻率的导电材料做成的高电阻率导条的鼠笼转子,为了减小转子的转动惯量,转子做得细长;另一种是采用铝合金制成的空心杯形转子,杯壁很薄,仅0.2-0.3mm,为了减小磁路的磁阻,要在空心杯形转子内放置固定的内定子.空心杯形转子的转动惯量很小,反应迅速,而且运转平稳,因此被广泛采用。 交流伺服电动机在没有控制电压时,定子内只有励磁绕组产生的脉动磁场,转子静止不动。当有控制电压时,定子内便产生一个旋转磁场,转子沿旋转磁场的方向旋转,在负载恒定的情况下,电动机的转速随控制电压的大小而变化,当控制电压的相位相反时,伺服电动机将反转。 交流伺服电动机的工作原理与分相式单相异步电动机虽然相似,但前者的转子电阻比后者大得多,所以伺服电动机与单机异步电动机相比,有三个显著特点: 1、起动转矩大 由于转子电阻大,其转矩特性曲线如图3中曲线1所示,与普通异步电动机的转矩特性曲线2相比,有明显的区别。它可使临界转差率S0>1,这样不仅使转矩特性(机械特性)更接近于线性,而且具有较大的起动转矩。因此,当定子一有控制电压,转子立即转动,即具有起动快、灵敏度高的特点。 2、运行范围较广 3、无自转现象 正常运转的伺服电动机,只要失去控制电压,电机立即停止运转。当伺服电动机失去控制电压后,它处于单相运行状态,由于转子电阻大,定子中两个相反方向旋转的旋转磁场与转子作用所产生的两个转矩特性(T1-S1、T2-S2曲线)以及合成转矩特性(T-S曲线)交流伺服电动机的输出功率一般是0.1-100W。当电源频率为50Hz,电压有36V、110V、220、380V;当电源频率为400Hz,电压有20V、2 6V、36V、115V等多种。
交流伺服电机驱动器使用说明书 1.特点 ●16位CPU+32位DSP三环(位置、速度、电流)全数字化控制 ●脉冲序列、速度、转矩多种指令及其组合控制 ●转速、转矩实时动态显示 ●完善的自诊断保护功能,免维护型产品 ●交流同步全封闭伺服电机适应各种恶劣环境 ●体积小、重量轻 2.指标 ●输入电源三相200V -10%~+15% 50/60HZ ●控制方法IGBT PWM(正弦波) ●反馈增量式编码器(2500P/r) ●控制输入伺服-ON 报警清除CW、CCW驱动、静止 ●指令输入输入电压±10V ●控制电源DC12~24V 最大200mA ●保护功能OU LU OS OL OH REG OC ST CPU错误,DSP错误,系统错误 ●通讯RS232C ●频率特性200Hz或更高(Jm=Jc时) ●体积L250 ×W85 ×H205 ●重量 3.8Kg 3.原理 见米纳斯驱动器方框图(图1)和控制方框图(图2) 4.接线 4.1主回路 卸下盖板坚固螺丝;取下端子盖板。用足够线经和连接器尺寸作连接,导线应采用额定温度600C以上的铜体线,装上端子盖板,拧紧盖板螺丝。螺丝拧紧力矩大于1.2Nm M4或2.0 Nm M5时才可能损坏端子,接地线径为2.0mm2 具体见接线图3 4.2 CN SIG 连接器[ 具体见接线图4 ●驱动器和电机之间的电缆长度最大20M ●这些线至少要离开主电路接线30cm,不要让这些线与电源进线走一线槽; 或让它们捆扎在一起 ●线经0.18mm2或以上屏蔽双绞线,有足够的耐弯曲力 ●屏蔽驱动器侧的屏蔽应连接到CN.SIG 连接器的20脚,电机侧应连接到J 脚 ●若电缆长于10M,则编码器电源线+5V、0V应接双线 4.3 CN I/F 连接 ●控制器等周边设备与驱动器之间距离最大为3M ●这些线至少和主电路接线相隔30cm ,不要让这些线与电源进线走同一线槽 或和它们捆扎在一起 ●COM+和COM-之间的控制电源(V DC)由用户供给
To &e 朴ut nfr man servo on &Qml cwTrnM off v by 胡5珥2 Err 匚口由ET5h 定 Fffhe 1 Tn pi t an r edit shock c^nr 电匚.1 lhe protecti/e earth (FE n terminal of rhe g=r^o ampirisrto the Drci^ecdva Barth t^E) cl :he contrcl 5* 2. Tris tarcjit a 匚?Alieis tc :h& servo rr 宙!x GlactrcHTiaTiGtc tmlro 5: CoimectiDii dbagram Foi the pin en the ajupliiier side, I'^fer t? S^CZIQE 3.&.1. ■ Zucoder cable olless Lho 30m When fabricating an encoder cable, use the MR-ECNM connector set. Referring to th.e following wiring diagram , you can fabricate an encoder cable of up w less than 30m Note 柚e sn enccxfef cable 旧 grimed th s wre is nert 优订uiird Servoi tnctor HC I1FE13 3:-^73 Bl
MR-E-200A 和HC-SE-152 的接线图 总接线图参考上面的,编码器接线如下: 2 Ccimectiaii iia^rain For ihE pm as3i?yiiner:T QH ihe imp liter =i^. i圮%r 3.31 ■ Encoder cabk less than 3Ona When 31?icMinf an encoder cable, uce the MR'ECNS 目录 一、伺服驱动概述 (1) 二、本产品特性 (2) 三、电路原理图及PCB版图 (4) 四、电路功能模块分析 (4) 五、焊接(附元件清单) (14) 六、编者设计体会 (16) 一.伺服驱动概述 1. 伺服电机的概念 伺服电机是在伺服系统中控制机械元件运转的发动机,作为一种执行元件,把所收到的电信号转换成电动机轴上的角位移或角速度输出,是一种补助马达间接变速装置。伺服电机是可以连续旋转的电-机械转换器,直流伺服电机的输出转速与输入电压成正比,并能实现正反向速度控制。 2.伺服电机分类 普通直流伺服电动机 直流伺服电机 { 低惯量直流伺服电动机 直流力矩电动机 3. 控制系统对伺服电动机的基本要求 宽广的调速范围 机械特性和调节特性均为线性 无“自转”现象 快速响应 控制功率小、重量轻、体积小等。 4. 直流伺服电机的基本特性 (1)机械特性在输入的电枢电压Ua保持不变时,电机的转速n随电磁转矩M 变化而变化的规律,称直流电机的机械特性 (2)调节特性直流电机在一定的电磁转矩M(或负载转矩)下电机的稳态转速n随电枢的控制电压Ua变化而变化的规律,被称为直流电机的调节特性 (3)动态特性从原来的稳定状态到新的稳定状态,存在一个过渡过程,这就是直流电机的动态特性 5. 直流伺服电机的驱动原理 伺服主要靠脉冲来定位,基本上可以这样理解,伺服电机接收到1个脉冲,就会旋转1个脉冲对应的角度,从而实现位移,因为,伺服电机本身具备发出脉冲的功能,所以伺服电机每旋转一个角度,都会发出对应数量的脉冲,这样,和伺服电机接受的脉冲形成了呼应,或者叫闭环,如此一来,系统就会知道发了多少脉冲给伺服电机,同时又收了多少脉冲回来,这样,就能够很精确的控制电机的转动,从而实现精确的定位,可以达到0.001mm 直流伺服电机分为有刷和无刷电机。有刷电机成本低,结构简单,启动转矩大,调速范围宽,控制容易,需要维护,但维护方便(换碳刷),产生电磁干扰,对环境有要求。因此它可以用于对成本敏感的普通工业和民用场合。无刷直流伺服电机电机体积小,重量轻,出力大,响应快,速度高,惯量小,转动平滑,力矩稳定。容易实现智能化,其电子换相方式灵活,可以方波换相或正弦波换相。电机免维护不存在碳刷损耗的情况,效率很高,运行温度低噪音小,电磁辐射很小,长寿命,可用于各种环境 编号: 审定成绩: 重庆邮电大学移通学院 毕业设计(论文) 设计(论文)题目:伺服电机运行控制器的设计 单位(系别):自动化 学生姓名:武波 专业:电气工程与自动化 班级:05010901 学号:0513090137 指导教师:聂岚 答辩组负责人:徐辉 填表时间:2013年6月 重庆邮电大学移通学院教务处制 摘要 步进电机是最常见的一种电机,作为一种数字伺服执行元件,能与控制芯片相结合成伺服控制系统;具有良好的随动性,能够实现精准控制,在现代控制领域中具有不可替代的作用。步进电机控制系统主要由步进控制器,功率放大器及步进电机等组成。采用单片机控制,用软件代替上述步进控制器,使得线路简单,成本低,可靠性大大增加。软件编程可灵活产生不同类型步进电机励磁序列来控制各种步进电机的运行方式。 本设计首先介绍了步进电机、AT89C52单片机、L297和L298N驱动电路的基本原理与功能;其次,设计步进电机实现起停、转向、速度控制方案;再次,在这些器件功能与特点的基础上,拟出设计思路,构建系统的总体框架;最后利用PROTEL软件绘出电路图,同时写出设计系统的运行流程和相关程序。本设计主要思想是以AT89C52单片机为控制核心,L297和L298N作为驱动芯片。通过单片机内部的定时器改变CP脉冲的频率时间对步进电机的转速控制,实现电机调速与正反转功能,并将电机所处的状态用数码管显示出来。 【关键词】伺服步进电机单片机AT89C52 ABSTRACT Stepper motor is one of the most common motors. As a digital servo actuators, it can be combined with a control chip into the servo control system; with the good follow—up, it can realize the precise control and hold an irreplaceable role in modern control domain. Stepper motor control system is mainly composed of stepping controller, power amplifier and the stepper motor, etc. Controlled by single chip microcomputer, using software instead of the above step controller, makes the circuit simple, low cost and reliability is greatly increased. Software programming can flexibly produce different types of stepper motor excitation sequence to control the operation of various kinds of stepper motor. This design first introduced the principle and function of the stepper motor, AT89C52 singlechip microcomputer, L297 and L298N drive circuit; Second, design the scheme of start-stop, steering and speed, position control of stepper motor; Once again, on the basis of these devices’ functions and characteristics, draw up the design idea and build the system's overall framework; Finally using PROTEL software draw circuit diagram, at the same time write a design system operation process and related procedures. The main idea of the design is based on AT89C52 single chip microcomputer as control core, chip L297 and L298 as a driver. Through single chip microcomputer internal timers to alter the frequency of CP pulses time stepping motor speed control, realizes the motor speed and positive &negative function, and use digital tube to display the motor's state. 【Key words】servo stepper motor singlechip AT89C52伺服电机驱动控制器
伺服电机运行控制器的
相关主题
文本预览