《Simulink建模与仿真》
§2.1
1、>> A=[1 2 3;4 5 6]
A = 1 2 3
4 5 6
2、>> B=[1 2 3]
B = 1 2 3
3、>> C=[4;5;6]
C =
4
5
6
4、>> A(2,3)
ans =6(说明:ans是answer的缩写,默认的输出符号)
5、MATLAB中分号(;)的作用有两点:一是作为矩阵或向量的分行符,二是作为矩阵或向量的输出开关控制符。即如果输入矩阵或向量后键入分号,则矩阵与向量不在MATLAB命令窗中显示,否别将在命令窗口中显示。
6、冒号操作符(:)的应用。冒号操作符在建立矩阵的索引与引用时非常方便且直接。如上述对多维矩阵F的建立中,冒号操作符表示对矩阵F第一维与第二维所有元素按照其顺序进行引用,从而对F进行快速赋值,无需一一赋值。如>> B=2:5 %对向量进行赋值;
B = 2 3 4 5
>> B(1:3)=2 %向量B从第2个到第3个元素全部赋值为2
B = 2 2 2 5
>> C=6:-2:0 %将向量C放行递减赋值.初始值为6,终止位为0,步长为一2
C = 6 4 2 0
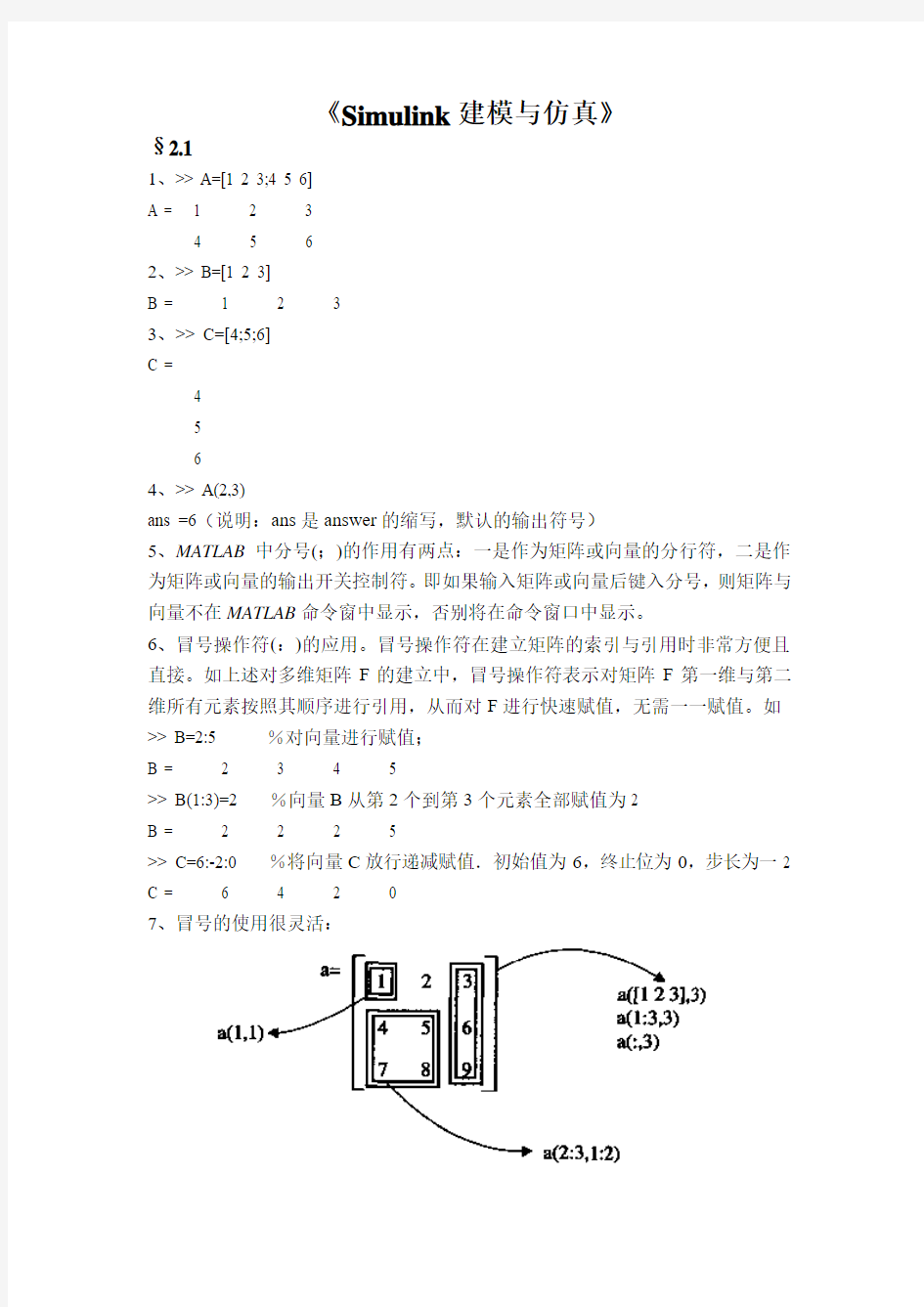
7、冒号的使用很灵活:
§2.2 矩阵单元的基本运算
1、矩阵的加减法
>>a=[1 2 3;4 5 6]
a =
1 2 3
4 5 6
>> b=[0 2 1;2 5 3]
b =
0 2 1
2 5 3
>> c=a+b
c =
1 4 4
6 10 9
>> d=a-b
d =
1 0 2
2 0 3
矩阵与标量的加法与减法是指标量本身与矩阵所有元素进行相应运算,如若B=1,则
>> e=a+B
e =
2 3 4
5 6 7
2、矩阵的乘方与除法
>>a =
1 2 3
4 5 6
>> b=[1 2;0 3;2 1]
b =
1 2
0 3
2 1
>> c=a*b
c =
7 11
16 29
在Matlab中,矩阵除法有两种形式,即左除(\)和右除(/)。如果A是一个非奇异方针,那么
>>A\B %表示A的逆与B的左乘,即inv(A)*B
>>A/B %表示A的逆与B的右乘,即B* inv(A)
3、矩阵的转置
>>a =
1 2 3
4 5 6
>> a'
ans =
1 4
2 5
3 6
4、对矩阵元素的操作与运算
在上述各种常用运算中,所有的操作都是针对矩阵所有元素或一部分元素的操作。其实还可以对矩阵元素进行单独的操作运算。对于加法和减法,对矩阵元素的操作与对矩阵的操作是一致的。其它运算对于所有矩阵元素的操作需要在操作符前加点,如下例所示:
>> A=[1 2;-1 5]
A =
1 2
-1 5
>> B=[7 2;1 0]
B =
7 2
1 0
>> C=[1+2i 5-2i;3+i 1+3i]
C =
1.0000 +
2.0000i 5.0000 - 2.0000i
3.0000 + 1.0000i 1.0000 + 3.0000i
>> A.*B %矩阵对应元素相乘
ans =
7 4
-1 0
>> B./A %矩阵对应元素相除
ans =
7 1
-1 0
>> B.^2
ans = %矩阵元素乘方运算
49 4
1 0
>> A.^B %矩阵对应元素幂运算
ans =
1 4
-1 1
>> C.' %矩阵转置
ans =
1.0000 +
2.0000i
3.0000 + 1.0000i
5.0000 - 2.0000i 1.0000 + 3.0000i
§2.3 多项式表达与基本运算
simulink用于动态系统建模、仿真与分析时,将会大量使用多项式。许多系统的模型描述(如系统的传递函数)都需要使用多项式,并在多项式描述的基础上。
1、多项式的建立
在MATLAB中,n阶多项式p(x)内一个长度为n+1的向量p所表示,向量p的元素为多项式的系数,且按照自变量x的降序排列。
例如:
p(x)=3x3+x+2x+3
在matlab中表示为:>> p=[3 1 2 3]
p(x)=3x3+2x+3
在matlab中表示为:>> p=[3 0 2 3] %多项式中系数为了0的项不能忽略,用0补齐。
2、matlab中多项式操作函数简介
(1)、roots(p):长度为n的向量,表示n阶多项式的根,即方程p(x)=0的根,可以为复数。
(2)、conv(p,q):表示多项式p,q的乘积,一般也指p,q的卷积。
(3)、poIy(A):计算矩阵A的特征多项式向量。
(4)、po1y(P):由长度为n的向量中的元素为根建立的多项式,结果是长度为n+1的向量。
(5)、polyval(p,x):若x为一数值,则计算多项式在x处的值;若x为向量,则计算多项式在x某一元素处的值。
举例:求多项式p(x)=3x3+x+2x+3的根:
>> p=[3 0 2 3]
>> rootp=roots(p)
rootp =
0.3911 + 1.0609i
0.3911 - 1.0609i
-0.7822
求q(x)=2x+3与p(x)=3x3+x+2x+3的积:
>> p=[3 0 2 3]
>> q=[2 3]
>> conv(p,q)
ans =
6 9 4 12 9
即q(x)=2x+3与p(x)=3x3+x+2x+3的积为:
6x4+9x3+4x2+12x+9
§2.4 Matlab的基本绘图功能
1.基本的二维图形绘制命令
(1)、plot(x,y):输出以向量x为横坐标,以向量y为纵坐标且按照x,y元素的顺序有序绘制的图形。x与y必须具有相同长度。
(2)、plot(y):输出以向量y元素序号m为横坐标,以向量y对应元素y m为纵坐标绘制的图形。
(3)plot(x1,y1,‘str’,x2,y2,‘str2’,…):用‘str1’指定的方式,输出
以x1为横坐标,yl为纵坐标的图形。用‘str2’指定的方式,输出以x2为横坐标,y2为纵坐标的图形。若省略‘str’,则matlab自动为每条曲线选择颜色与线型。‘str’选项中的部分参数如表2.1所示。
表2.1 plot命令参数
2、简单的三维绘图命令
1)、plot3(x,y,z):用向量x,y和z的相应点(x i,y i,z i)进行有序绘制三维图形。向量x,y,z必须有相同的长度。
2)、plot3(x1,y1,z1,‘str1’,x2,y2,z2,‘str2’,…):用‘str1’指定的方式,对x1,y1和z1进行绘图;用‘str2’指定的方式,对x2,y2和z2进行绘图;如果省略‘str’,则matlab自动选择颜色与线型。
举例:
1)、绘制sin函数在【0,2π】上的图形:
>> x=0:0.1:2*pi;
>> y=sin(x);
>> plot(x,y,'*')
2)、用matlab在同一图形窗口中绘制多项式q(x)=2x+3与p(x)=3x3+x+2x+3的曲线,其中x∈【-2,5】,要求分别用不同的线型与颜色表示。
>> x=-2:0.1:5;
>> q=2*x+3;
>> p=3*x.^2+2*x+3;
>> plot(x,q,'r--',x,p,'b--')
3、简单的图形控制命令
(1)、clc:清除命令窗口。
(2)、grid:自动在各个坐标轴上加上虚线型的网格。
(3)、hold on:保持当前的图形,允许在当前图形状态下绘制其它图形,即在同一图形窗口中绘制多幅图形。
(4)、hold off:释放当前图形窗口,绘制的下一幅图形将作为当前图形,即覆盖原来图形。这是matlab的缺省状态。
(5)、hold:在hold on与hold off之间进行切换。
4、简单的子图命令
(1)subplot(m,n,p):将图形窗口分成m行n列的子窗口,序号为p的子窗口为当前窗口。子窗口的编号由上至下,由左至右。
(2)subplot:设置图形窗口为缺省模式,即subplot(1,1,1)单窗口模式。
5、在一个图形窗口的左侧子图中绘制函数y1(x)=x3-2x-3,在右侧子图中绘制函数y2(x)=xsin(x),其中x∈【-3,3】。
>> x=-3:0.1:3;
>> y1=x.^3-2*x-3;
>> y2=x.*sin(x);
>> subplot(1,2,1),plot(x,y1,'*'),grid
>> subplot(1,2,2),plot(x,y2,'-'),grid
§2.5 M文件与MAILAB函数
25.1 M文件编辑器
在matlab命令行下输入:
>> edit
则弹出M文件编辑器窗口。
25.2matlab语言的语法
1、注释;
2、赋值语句;
3、逻辑表达式;
4、条件控制语句(if);
5、循环语句(for、while)。
25.3matlab脚本文件与M函数
1)、matlab脚本文件
例如:编写一个M文件绘制函数
sin,0
(),0366
6,3
x x
y x x x
x x
≤
?
?
=<≤-
?
?-+>
?
在区间【,】中的
图形。
解:在matlab命令行下输入edit命令以打开M文件编辑器,输入以下程序:
x=-6:0.1:6; %设定自变量x的取值范围
leng=length(x) %计算向量x的长度
for m=1:leng %计算函数值
if x(m)<=0 %判断x取值所在范围
y(m)=sin(x(m)); %计算分段函数值
elseif x(m)<=3
y(m)=x(m); %计算分段函数值
else
y(m)=-x(m)+6; %计算分段函数值
end
end
plot(x,y,'*'),grid; %绘制函数曲线
编辑完后保存为demomfile1.m(该文件就是一个matlab脚本文件)
在matlab命令行中输入demomfile1:>> demomfile1
就会执行相应文件,输出相应的图形。
2)、M函数
Matlab的函数与脚本不同,M函数的第一行为关键字function,函数第—次执行时将生成内存代码,生成的变量放在函数的工作区。在MATLAB中有大量的内置函数及大量的工具箱函数,使用它们可以完成大部分的工作;但由于不同的用户有不问的需要,Matlab允许用户开发自己的专用或通用函数,以扩展MATLAB的函数应用。这里仅简单介绍一下M函数的编制与使用方法。这对理解后面的S-函数有很重要的作用。(详参原文)
2.6 matlab的单元与结构体
§3 动态系统模型及simulink表示
3.1简单系统模型及表示
3.1.3简单系统的Simulink描述
本章主要介绍动态系统的基本知识,为使用simu1ink进行系统仿真打下基础。因此这里并不准备建立系统的simulink模型,而是采用编写M脚本文件的方式对系统进行描述并进行简单的仿真。下面以例3.1中的简单系统为例,说明在simulink中如何对简单系统进行描述。
例3.1:编写如下的systemdemo1.m脚本文件进行描述与分忻
%systemdemo1.m
u=0:0.1:10; %设定系统输入范围与仿真步长
leng=length(u); %计算系统输入序列长度
for i=1:leng %计算系统输出序列
if u(i)<=1 %逻辑判断
y(i)=u(i).^2;
else
y(i)=sqrt(u(i));
end
end
plot(u,y);grid;
图3.1所示为此简单系统在【0,10】时间之内的输入输出关系图,其实就是系统在此他围内的仿真结果。修改此M脚本文件,不断改变系统输入的时间范围与系统输入的仿真步长,使可以完成系统的仿真分析,并绘制不同的仿真结果。当然,采用Simulink模型可以进行交互式的仿真。在第5章中将使用smulink对系统进行交互式仿真。
3.2离散系统模型及表示
3.2.1离散系统的基本概念
前面所涉及到的系统中,无论是系统的输入还是系统的输出均是连续的变量,在这里连续指的是系统的输入与输出均在时间变量上连续取值(与数学上函数连续概念并不相同)。本节将简单介绍离散系统的基本概念,系统的描述与简单仿真。
所谓离散系统,是指系统的输入与输小是在离散的时间上取值,而且离散的时间只有相同的时间间隔。下面给出离散系统更全面的定义。
[定义3.2]离散系统。凡是满足如下条件的系统均为离散系统:
(1)系统每隔固定的时间间隔才“更新”一次,即系统的输入与输出每隔固定的时间间隔便改变一次。固定的时间间隔称为系统的“采样”时间。
(2)系统的输出依赖于系统当前的输入、以往的输入与输出,即系统的输出是它们的某种函数。
(3)离散系统具有离散的状态。其中状态指的是系统前一时刻的输出量。
3.2.2离散系统的数学描述
详参原文……
3.2.3 离散系统的SimuIink描述
这里以[例3.2]中的离散系统为例,说明如何利用simulink对离散系统进行描述,并在此基础上时系统进行简单的分析。与前面相类似,此处并不建立系统的simulink的模型进行仿真,而是编写M脚本文件从原理上对离散系统进行说明离散系统与连续系统的区别之处。
编写脚本文件systemdemo2.m对[例3.2]中的离散系统进行描述分析。
%systemdemo2.m文件
y(1)=3; %表示离散系统初始状态为3
%由于matlab中数字下标从1开始,这里y(1)相当于文中的y(0)=3,下同
u(1)=0; %表示系统初始输入为0
for i=2:11 %设定离散系统输入范围为时刻0到时刻10
u(i)=2*i; %离散系统输入向量
y(i)=u(i).^2+2*u(i-1)+3*y(i-1);%离散系统输出变量
end
plot(u,y);grid; %绘制系统输出结果
系统从时刻0到时刻10的输入与输出的关系如图3.2所示。其中横坐标表示离散系统的输入向量,而纵坐标表示离散系统的输出向量。说明:这里并没有指定离散系统的采样时间,而仅仅举例说明离散系统的求解分析。在实际的系统中.必须指定系统的采样时间,只有这样才能获得离散系统真正的动态性能。
3.2.4 线性离散系统
……
3.2.5线性离散系统的数学描述
……
3.2.6线性离散系统的simulink描述
在线性离散系统仿真分析中,很少直接使用数学方程进行系统描述,一般采用线性离散系统的滤波器模型、传递函数模型,以及状态空间模型进行系统描述。本部分介绍线性离散系统的各种描述模型的simulink现。线性离散系统的描述方式有如下四种形式:
(1)线性离散系统的滤波器模型:在Simulink中,滤波器表示为num=[n0 n1 n2];den=[d0 d1];其中num表示Z变换域分式的分子系数向量,den为分母系数向量。
(2)线性离散系统的传递函数模型:在Simulink中,系统的传递的数表示为num=[n0 nl n2];den=[d0 d1];
(3)线件离散系统的零极点模型:在Simulink中,系统零极点表示为gain=K:zeros=[21,z2];ples=[0,p1];
(4)线性离散系统的状态空间模型:在SimuIink中,设系统差分方程为如下形式:x(n+1)=Fx(n)+Gu(n);y(M)=Cx(n)+Du(n)。具巾x(n),u(n),y(n)分别为线性离散系统的状态变量、输入向量、输出向量。F,G,C,D分别为变换矩阵。在simulink中,其表示很简单,只需要输入相应的变换矩阵F,G,C ,D即可。
一般来说,在不同的条件下使用不同的系统模型。在matlab中可以对系统的不同描述进行相互转化,并使用不同的命令对系统进行简单的频率响比分析。下面举例说明线性离散系统的简单频率分析。
………………
3.3 连续系统模型及表示
与离散系统不同,连续系统是指系统输比在时间上连续变化,而非仅在离散的时刻采样取值。连续系统的应用非常广泛,下面给出连续系统的基本概念。
[定义3.4』连续系统。满足如下条件的系统为连续系统:
(1)系统输出连续变化。变化的间隔为无穷小量。
(2)对系统的数学描述来说,存在系统输入或输出的微分项(导数项)。
(3)系统具有连续的状态。在离散系统中,系统的状态为时间的离散函数,而连续系统的状态为时间连续量。
3.3.2连续系统的数学描述
3.3.3连续系统的Simulink描述
3.3.4线性系统描述
3.3.5线性连续系统的数学描述
3.3.6线性连续系统的Simulink描述
3.4混合系统模型及描述
3.4.1混合系统的数学描述
3.4.2混合系统的simulink描述与简单分析
§4创建simulink模型
4.1 启用simulink并建立系统模型
4.2 simulink模块库简介与使用
4.2.1 simulink公共模块库
simulink公共模块库共包含9个模块库:
1.Continuous(连续系统模块库)
连续系统模块库以及其中各模块的功能如图4.4所示:
第三项:memory:;
第四项:state-space:线性连续系统的状态空间描述;
第五项:transfer fcn :线性连续系统的传递函数描述;
第六项:transport delay:对输入信号进行固定时间延迟;
第七项:variable transport delay:对输入信号进行可变时间延迟;第八项:zero-pole:线性连续系统的零极点模型。
2.Discrete(离散系统模块库)
离散系统模块库以及其中各摸块的功能如图4.5所示,
1、d iscrete transfer Fcn:线性离散系统的传递函数描述;
2、d iscrete zero-pole:线性离散系统的零极点模型描述;
3、d iscrete filter:线性离散系统的滤波器描述;
4、d iscrete state-space:线性离散系统的状态空间描述;
5、d iscrete-time integrator:离散时间积分器;
6、f irst-order hold:离散信号的一阶保持器;
7、u nit delay:单位延迟;
8、z ero-order hold:离散信号的零阶保持器。
(hold是保持器的意思!)
3、Fundions&TabIes(函数与表库)
函数与表库以及其中各模块的功能如图4.6所示。
1、d irect look-up table(n-D):表数据选择器(从表中选择数据)(在matlab6.5中
该项属于look-up tables项)
2、f cn:求取输入信号的数学函数值(在matlab6.5中该项属于user-defined
functions项)
3、i nterpolation(n-D)using PreLook-Up:对输入信号进行内插值运算。(在
matlab6.5中该项属于look-up tables项)
4、l ook-up table:输入信号的一维线性内插值。(在matlab6.5中该项属于
look-up tables项)
5、l ook-up table(2-D):输入信号的二维线性内插。(在matlab6.5中该项属于
look-up tables项)
6、l ook-up table(n-D):输入信号的n维线性内插。(在matlab6.5中该项属于
look-up tables项)
7、m atlab fcn:m函数(对输入进行运算输出结果)(在matlab6.5中该项属于
user-defined functions项)
8、p olynominal:多项式求值。(在matlab6.5中该项属于math opernations项)
9、p relook-up index search:查找输入信号所在范围。(在matlab6.5中该项属
于look-up tables项)
10、s-function:s函数模块(在matlab6.5中该项属于user-defined functions项)
11、S-function builder:s函数生成器(在matlab6.5中该项属于user-defined functions项)
总结:1、凡是关于函数的,在matlab6.5中该项属于user-defined functions项。
2、对输入信号进行插值的,在matlab6.5中该项属于look-up tables项。
3、polynominal:多项式求值。(在matlab6.5中该项属于math opernations 项)
4、math(数学运算库)
2、a lgebraic constraint:输出强制系统输入为零的代数状态;
3、b itwise logical operator:按为逻辑运算;
4、c ombinatorial logic:逻辑真值查找;
5、c omplex to magnitude-angle:输出输入复数的幅值与相位;
6、c omplex to real-imag:输出系统输入的实部或虚部;
7、D ot product:点乘运算;
8、G ain:信号增益;
9、L ogical operator:信号逻辑运算;
10、Magnitude-angle to complex:幅值与相位转换为复数形式;
11、Math function:特定的一些数学函数;
12、matrix gain:矩阵增益;
13、minmax:求取输入的最小或最大值;
14、product:乘法或除法器;
15、real-imag to complex:从输入实部与虚部构造复数;
16、relational operator:关系运算器;
17、rounding function:求整运算器;
18、sign:符号运算;
19、slider gain:渐变增益;
20、sum:对输入求和或差;
21、trigonometric function:三角与双曲函数。
注意:matlab6.5中的数学函数中还有:
assignment、matrix concatenation、polynominal、reshape
5、nonlinear(非线性系统模块库)
1、b acklash:死区间隙;(matlab6.5中在discontinuities)
2、c oulomb &viscous friction:库仑粘滞信号;(mtlab6.5中在discontinuities)
3、d ead zone:死区信号;(mtlab6.5中在discontinuities)
4、m anual switch:双输出选择器(手动);(mtlab6.5中在signal routing中)
5、m ultiport switch:多端口输出选择器;(mtlab6.5中在signal routing中)
6、q uantizer:量化器;(mtlab6.5中在discontinuities)
7、r ate limiter:信号上升、下降速率控制器;(mtlab6.5中在discontinuities)
8、r elay:信号延迟器;(mtlab6.5中在discontinuities)
9、s aturation:饱和信号;(mtlab6.5中在discontinuities)
10、switch:三路选择器(根据输入2控制输出)(mtlab6.5中在signal routing 中)
这些信号在matlab6.5中一部分在discontinuities中,在signal routing中。
6、signal&systems(信号与系统模块库)
1、data type conversion:数据类型转换器;(mtlab6.5在signal attributes中)
2、demux:信号分解器;(mtlab6.5在signal routing中)
3、from:从goto模块中获得信号;(mtlab6.5中在signal routing中)
4、function-call generator:函数调用发生器;(mtlab6.5中在ports&subsystems 中)
5、goto:向goto模块传递信号;(mtlab6.5中在signal routing中)
6、goto tag visibility:goto模块标记控制器;(mtlab6.5中在signal routing中)
7、hit crossing:将信号与特定的偏移值比较;(mtlab6.5中在discontinuities 中)
8、IC:初始化信号;(mtlab6.5中在signal attributes中)
9、matrix concatenation:矩阵串联器;(mtlab6.5中在math operations中)
10、merge:合并输入信号为一个输出;(mtlab6.5中在signal routing中)
11、model info:模块控制信息;(mtlab6.5中在model-wides utilities中)
12、mux :信号组合器;(mtlab6.5中在signal routing中)
13、probe:信号探测器;(mtlab6.5中在signal attributes中)
14、reshape:信号维数改变器;(mtlab6.5中在math operations中)
15、selector:选择或重组信号:(mtlab6.5中在signal routing中)
16、signal specification:信号线属性修改;(mtlab6.5中在signal attributes 中)
17、width:输入信号宽度;(mtlab6.5中在signal attributes中)
1、a ssignment:对信号进行分配;(mtlab6.5中在math operations中)
2、b us creator:由输入产生总线信号;(mtlab6.5中在signal routing中)
3、b us selector:总线信号选择器;(mtlab6.5中在signal routing中)
4、d ata store memory:用户定义的数据存储区;(mtlab6.5中在signal routing
中)
5、d ata store read:从数据存储区中读取数据;(mtlab6.5中在signal routing中)
6、d ata store write:向数据存储区写数据;(mtlab6.5中在signal routing中)
7、s inks(系统输出模块)
基于Matlab/Simulink 的BOOST电路仿真 姓名: 学号: 班级: 时间:2010年12月7日
1引言 BOOST 电路又称为升压型电路, 是一种直流- 直流变换电路, 其电路结构如图1 所示。此电路在开关电源领域内占有非常重要的地位, 长期以来广泛的应用于各种电源设备的设计中。对它工作过程的理解掌握关系到对整个开关电源领域各种电路工作过程的理解, 然而现有的书本上仅仅给出电路在理想情况下稳态工作过程的分析, 而没有提及电路从启动到稳定之间暂态的工作过程, 不利于读者理解电路的整个工作过程和升压原理。采用matlab仿真分析方法, 可直观、详细的描述BOOST 电路由启动到达稳态的工作过程, 并对其中各种现象进行细致深入的分析, 便于我们真正掌握BOO ST 电路的工作特性。 图1BOO ST 电路的结构 2电路的工作状态 BOO ST 电路的工作模式分为电感电流连续工作模式和电感电流断续工作模式。其中电流连续模式的电路工作状态如图2 (a) 和图2 (b) 所示, 电流断续模式的电路工作状态如图2 (a)、(b)、(c) 所示, 两种工作模式的前两个工作状态相同, 电流断续型模式比电流连续型模式多出一个电感电流为零的工作状态。 (a) 开关状态1 (S 闭合) (b) 开关状态2 (S 关断) (c) 开关状态3 (电感电流为零) 图2BOO ST 电路的工作状态
3matlab仿真分析 matlab 是一种功能强大的仿真软件, 它可以进行各种各样的模拟电路和数字电路仿真,并给出波形输出和数据输出, 无论对哪种器件和哪种电路进行仿真, 均可以得到精确的仿真结果。本文应用基于matlab软件对BOO ST 电路仿真, 仿真图如图3 所示,其中IGBT作为开关, 以脉冲发生器脉冲周期T=0.2ms,脉冲宽度为50%的通断来仿真图2 中开关S的通断过程。 图3BOO ST 电路的PSp ice 模型 3.1电路工作原理 在电路中IGBT导通时,电流由E经升压电感L和V形成回路,电感L储能;当IGBT关断时,电感产生的反电动势和直流电源电压方向相同互相叠加,从而在负载侧得到高于电源的电压,二极管的作用是阻断IGBT导通是,电容的放电回路。调节开关器件V的通断周期,可以调整负载侧输出电流和电压的大小。负载侧输出电压的平均值为: (3-1) 式(3-1)中T为开关周期, 为导通时间,为关断时间。
MATLAB/Simulink 电力系统建模与仿真 实验报告 姓名:****** 专业:电气工程及其自动化 班级:******************* 学号:*******************
实验一无穷大功率电源供电系统三相短路仿真 1.1 无穷大功率电源供电系统仿真模型构建 运行MATLAB软件,点击Simulink模型构建,根据电路原理图,添加下列模块: (1)无穷大功率电源模块(Three-phase source) (2)三相并联RLC负荷模块(Three-Phase Parallel RLC Load) (3)三相串联RLC支路模块(Three-Phase Series RLC Branch) (4)三相双绕组变压器模块(Three-Phase Transformer (Two Windings)) (5)三相电压电流测量模块(Three-Phase V-I Measurement) (6)三相故障设置模块(Three-Phase Fault) (7)示波器模块(Scope) (8)电力系统图形用户界面(Powergui) 按电路原理图连接线路得到仿真图如下: 1.2 无穷大功率电源供电系统仿真参数设置 1.2.1 电源模块 设置三相电压110kV,相角0°,频率50Hz,接线方式为中性点接地的Y形接法,电源电阻0.00529Ω,电源电感0.000140H,参数设置如下图:
1.2.2 变压器模块 变压器模块参数采用标幺值设置,功率20MVA,频率50Hz,一次测采用Y型连接,一次测电压110kV,二次侧采用Y型连接,二次侧电压11kV,经过标幺值折算后的绕组电阻为0.0033,绕组漏感为0.052,励磁电阻为909.09,励磁电感为106.3,参数设置如下图: 1.2.3 输电线路模块 根据给定参数计算输电线路参数为:电阻8.5Ω,电感0.064L,参数设置如下图: 1.2.4 三相电压电流测量模块 此模块将在变压器低压侧测量得到的电压、电流信号转变成Simulink信号,相当于电压、电流互感器的作用,勾选“使用标签(Use a label)”以便于示波器观察波形,设置电压标签“Vabc”,电流标签“Iabc”,参数设置如下图:
【最新整理,下载后即可编辑】 实验四SIMULINK仿真模型的建立及仿真(一) 一、实验目的: 1、熟悉SIMULINK模型文件的操作。 2、熟悉SIMULINK建模的有关库及示波器的使用。 3、熟悉Simulink仿真模型的建立。 4、掌握用不同的输入、不同的算法、不同的仿真时间的系统仿真。 二、实验内容: 1、设计SIMULINK仿真模型。 2、建立SIMULINK结构图仿真模型。 3、了解各模块参数的设定。 4、了解示波器的使用方法。 5、了解参数、算法、仿真时间的设定方法。 例7.1-1 已知质量m=1kg,阻尼b=2N.s/m。弹簧系数k=100N/m,且质量块的初始位移x(0)=0.05m,其初始速度x’(0)=0m/s,要求创建该系统的SIMULINK模型,并进行仿真运行。 步骤: 1、打开SIMULINK模块库,在MATLAB工作界面的工具条单击SIMULINK图标,或在MATLAB指令窗口中运行simulink,就可引出如图一所示的SIMULINK模块浏览器。
图一:SIMULINK模块浏览器 2、新建模型窗,单击SIMULINK模块库浏览器工具条山的新建图标,引出如图二所示的空白模型窗。 图二:已经复制进库模块的新建模型窗 3、从模块库复制所需模块到新建模型窗,分别在模块子库中
找到所需模块,然后拖进空白模型窗中,如图二。 4、新建模型窗中的模型再复制:按住Ctrl键,用鼠标“点亮并拖拉”积分模块到适当位置,便完成了积分模块的再复制。 5、模块间信号线的连接,使光标靠近模块输出口;待光标变为“单线十字叉”时,按下鼠标左键;移动十字叉,拖出一根“虚连线”;光标与另一个模块输入口靠近到一定程度,单十字变为双十字;放开鼠标左键,“虚连线”变变为带箭头的信号连线。如图三所示: 图三:已构建完成的新模型窗 6、根据理论数学模型设置模块参数: ①设置增益模块
M文件: k=1; Int_F=inline('t','t'); for x=[1,3,5] f_x(k)=x^3+x+log(x)*sin(x)+quad8(Int_F,0,x); k=k+1; end f_x >> Calcfx Warning: QUAD8 is obsolete. We use QUADL instead. > In quad8 at 35 In Calcfx at 4 f_x = 2.5000 34.6550 140.9567 M文件: function[mean,stdev]=stat(x) n=length(x); mean=sum(x)/n; stdev=sqrt(sum(x-mean).^2/n); >> x=[1,3,2]; >> [k,l]=stat(x) k = 2 l = 微积分方程组的MA TLAB函数: 文件funcforex123.m function xdot=funcforex123(t,x,flag,r,l,c) xdot=zeros(2,1); xdot(1)=-r/l*x(1)-1/l*x(2)+1/l*f(t); xdot(2)=1/c*x(1); function in=f(t) in=(t>0)*1; 文件Ex123.m l=1; c=0.1; for r=[1.5 3 5]
[t,x]=ode45('funcforex123',[-1,10],[0;0],[],r,l,c); figure(1);plot(t,x(:,1));hold on;xlabel('time sec'); text(0.9,0.17,'\lefttarrow i_L(t)');grid; figure(2);plot(t,x(:,2));hold on;xlabel('time sec'); text(0.5,0.3,'\leftarrow u_C(t)');grid; End >> ex123 Warning: Unable to interpret TeX string "\lefttarrow i_L(t)". > In ex123 at 5 Warning: Unable to interpret TeX string "\lefttarrow i_L(t)". > In ex123 at 7 Warning: Unable to interpret TeX string "\lefttarrow i_L(t)". > In ex123 at 7
Simulink 建模方法 在一些实际应用中,如果系统的结构过于复杂,不适合用前面介绍的方法建模。在这种情况下,功能完善的Simulink 程序可以用来建立新的数学模型。Simulink 是由Math Works 软件公司1990年为MATLAB 提供的新的控制系统模型图形输入仿真工具。它具有两个显著的功能:Simul(仿真)与Link(连接),亦即可以利用鼠标在模型窗口上“画”出所需的控制系统模型。然后利用SIMULINK 提供的功能来对系统进行仿真或线性化分析。与MATLAB 中逐行输入命令相比,这样输入更容易,分析更直观。下面简单介绍SIMULINK 建立系统模型的基本步骤: (1) SIMULINK 的启动:在MATLAB 命令窗口的工具栏中单击按钮或者在命令提示符>>下键入simulink 命令,回车后即可启动Simulink 程序。启动后软件自动打开Simullink 模型库窗口,如图 7所示。这一模型库中含有许多子模型库,如Sources(输入源模块库)、Sinks(输出显示模块库)、Nonlinear(非线性环节)等。若想建立一个控制系统结构框图,则应该选择File| New 菜单中的Model 选项,或选择工具栏上new Model 按钮,打开一个空白的模型编辑窗口如图 8所示。 (2) 画出系统的各个模块:打开相应的子模块库,选择所需要的元素,用鼠标左键点中后拖 到模型编辑窗口的合适位置。 (3) 给出各个模块参数:由于选中的各个模块只包含默认的模型参数,如默认的传递函数模 型为1/(s+1)的简单格式,必须通过修改得到实际的模块参数。要修改模块的参数,可以用鼠标双击该模块图标,则会出现一个相应对话框,提示用户修改模块参数。 (4) 画出连接线:当所有的模块都画出来之后,可以再画出模块间所需要的连线,构成完整 的系统。模块间连线的画法很简单,只需要用鼠标点按起始模块的输出端(三角符号),再拖动鼠标,到终止模块的输入端释放鼠标键,系统会自动地在两个模块间画出带箭头的连线。若需要从连线中引出节点,可在鼠标点击起始节点时按住Ctrl 键,再将鼠标拖动到目的模块。 (5) 指定输入和输出端子:在Simulink 下允许有两类输入输出信号,第一类是仿真信号, 可从source(输入源模块库)图标中取出相应的输入信号端子,从Sink(输出显示模块库)图标中取出相应输出端子即可。第二类是要提取系统线性模型,则需打开Connection(连接模块库)图标,从中选取相应的输入输出端子。 例9 典型二阶系统的结构图如图9所示。用SIMULINK 对系统进行仿真分析。 图 7 simulink 模型库 图8 模型编辑窗口
《通信系统仿真》实验报告 姓名杨利刚班级A0811 实验室203 组号28 学号28 实验日期 实验名称实验三Simulink建模与仿真实验成绩教师签字 一、实验目的 1、了解simulink的相关知识 2、掌握Matlab/simulink提供的基本模块库和常用的模块 3、掌握simulink建模仿真的基本方法 二、实验原理 Simulink是MATLAB中的一种可视化仿真工具,是一种基于MATLAB的框图设计环境,是实现动态系统建模、仿真和分析的一个软件包,被广泛应用于线性系统、非线性系统、数字控制及数字信号处理的建模和仿真中。Simulink可以用连续采样时间、离散采样时间或两种混合的采样时间进行建模。它也支持多速率系统,也就是系统中的不同部分具有不同的采样速率,并且提供了交互式图形化环境和可定制模块库来对其进行设计、仿真、执行和测试。 Simulink基本库是系统建模中最常用的模块库,原则上一切模型都是可以由基本库中的模块来构建,为了方便专业用户使用,Simulink还提供了大量的专业模块库,如为通信系统和信号处理而提供的CDMA参考库、通信模块库和DSP模块库等,但是,建议初学者不宜过多使用这些专业库,而应当从所建摸的系统原理入手,利用基本模块来构建系统,以深入理解系统运行情况。 Simulink的常用库模块有12个: (1)连续时间线性系统库;(2)非连续系统库;(3)离散系统库;(4)查表操作模块;(5)数学函数库;(6)模型检查和建模辅助工具;(7)端口和子系统;(8)信号路由库;(9)信号属性转换库;(10)信号源库;(11)信宿和仿真显示仪器库;(12)用户自定义函数库。 Simulink的建模主要是子系统的建模,子系统建模完成后,再对其进行封装,即完成了一个基本模型的建立。 三、实验内容 1、现有对RLC充放电电路进行仿真的模型。请参照仿真模型,进行Simulink的建模仿真,相关参数按照例题中的参数设置。
实验六 基于Simulink 的简单电力系统仿真 实验目的 1) 熟悉Simulink 的工作环境; 2) 掌握Simulink 电力系统工具箱的使用; 3) 掌握在Simulink 的工作环境中建立简单电力系统的仿真模型 实验内容 输电线路电路参数建模时采用电力系统分析中常用的π型等值电路,搭建如图1所示的一个简单交流单相电力系统,在仿真进行中,负载通过断路器切除并再次投入。π型等值电路具体元件参数如下:Ω=2.5R ,H L 138.0=, F C C μ967.021==。 图1 简单电力系统仿真示意图 1) 在Simulink 中建立简单交流单相电力系统模型,并进行仿真,观测负载电流和输电线路末端电压; 2) 结合理论知识分析上述观测信号变化的原因; 3) 比较不同功率因数,如cos φ=1、cos φ=0.8(感性)、cos φ=0.8(容性)负载条件下的仿真结果 实验原理与方法 1、系统的仿真电路图 实验步骤 根据所得建立模型,给定参数,得到仿真结果 cos φ=1 cos φ=0.8(感性) cos φ=0.8(容性)
实验结果与分析 cosφ=1 cosφ=0.8(感性) cosφ=0.8(容性) 仿真结果分析 (1)在纯阻性负载电路中,电压相位与电流相位相同;与感性负载相比,断路器重新闭合后电流没有额外的直流分量。 (2)在感性负载中,电压相位超前电流相位;断路器重新闭合时,交变的电流瞬间增加了一个直流分量,随后逐渐减小。 (3)在容性负载中,电压相位滞后于电流相位;断路器重新闭合时,电流瞬间突变至极大;与感性负载和纯阻性负载相比,断路器断开时的末端电压由于有电容放电作用,电压波形畸变很小。 (4)当断路器断开时,线路断路,电流突变为0,但电压行波仍在进行,因此在末端能够测量到连续的电压波形,但断路器断开对电压波形造成了影响,产生了畸变。这是由于能量是通过电磁场传递的,线路断开时电压继续向前传递。 总括:L和C对输出波形振荡的频率和幅度影响程度不同,当变化相同幅度时,电容对振荡频率和幅度的影响要比电感的大。 感想:Matlab中Simulik通过拖拉建模方式对电路进行仿真,具有快捷、方便、灵活的特点。Simulink的仿真电路简洁、参数调整方便。仿真结果直观。 通过本次实验,我认识到了建模与仿真的一般性方法,收获甚多,也更进一步了解了Matlab,Matlab不仅仅在平时的编程方面功能强大,在仿真方面也熠熠生辉。
一频分复用和超外差接收机仿真 目的 1熟悉Simulink模型仿真设计方法 2掌握频分复用技术在实际通信系统中的应用 3理解超外差收音机的接收原理 内容 设计一个超外差收接收机系统,其中发送方的基带信号分别为1000Hz的正弦波和500Hz的方波,两路信号分别采用1000kHz和1200kHz的载波进行幅度调制,并在同一信道中进行传输。要求采用超外差方式对这两路信号进行接收,并能够通过调整接收方的本振频率对解调信号进行选择。 原理 超外差接收技术广泛用于无线通信系统中,基本的超外差收音机的原理框图如图所示: 图1-1超外差收音机基本原理框图 从图中可以看出,超外差接收机的工作过程一共分为混频、中频放大和解调三个步骤,现分别叙述如下: 混频:由天线接收到的射频信号直接送入混频器进行混频,混频所使用的本机振荡信号由压控振荡器产生,并可根据调整控制电压随时调整振荡频率,使得器振荡频率始终比接收信号频率高一个中频频率,这样,接受信号与本机振荡在混频器中进行相乘运算后,其差频信号的频率成分就是中频频率。其频谱搬移过程如下图所示:
图1-2 超外差接收机混频器输入输出频谱 中频放大:从混频模块输出的信号中包含了高频和中频两个频率成分,这样一来只要采用中频带通滤波器选出进行中频信号进行放大,得到中频放大信号。 解调:将中频放大后的信号送入包络检波器,进行包络检波,并解调出原始信号。 步骤 1、设计两个信号源模块,其模块图如下所示,两个信号源模块的载波分别为1000kHz,和1200kHz,被调基带信号分别为1000Hz的正弦波和500Hz的三角波,并将其封装成两个子系统,如下图所示: 图1-2 信源子系统模型图 2、为了模拟接收机距离两发射机距离不同引起的传输衰减,分别以Gain1和Gain2模块分别对传输信号进行衰减,衰减参数分别为0.1和0.2。最后在信道中加入均值为0,方差为0.01的随机白噪声,送入接收机。 3、接收机将收到的信号直接送入混频器进行混频,混频所使用的本机振荡信号由压控振荡器产生,其中压控振荡器由输入电压进行控制,设置Slider Gain模块,使输入参数在500至1605可调,从而实现本振的频率可控。压控振荡器的本振频率设为465kHz,灵敏度设为1000Hz/V。
河北北方学院 毕业论文 题目:数字调制系统的SIMULINK实现研究 三种基本调制制度的功率谱密度研究院系:信息工程系 专业:信息工程 年级:07级 河北北方学院教务处制 三种基本调制制度的功率谱密度研究 摘要 随着通信系统的规模和复杂度不断增加,传统的设计方法已经不能适应发展的需要,通信系统的模拟仿真技术越来越受到重视。而通信系统的计算机模拟仿真技
术是一种全新的系统设计方法,它可以让用户在很短的时间内建立整个通信系统模型,并对其进行模拟仿真。本文首先介绍了SIMULINK应用及通信技术的发展状况。然后对SIMULINK的工作原理及使用方法进行阐述,接着介绍基本的数字调制系统并分析三种调制制度2ASK、2FSK和2PSK的基本原理。再对三种调制制度的功率谱密度进行分析,最后利用SIMULINK建立系统模型对三种调制制度的功率谱密度进行模拟仿真并分析结果。 关键词:调制制度 SIMULINK 功率谱密度系统模型 Abstract As communications systems continue to increase in size and complexity, traditional design methods have been unable to meet the needs of development, communication system simulation technology more and more attention. Er Communication System Computer simulation technology is a new design method, which allows users in a very short period of time to establish the communication system model, and its
实验四 基于Simulink 进行系统仿真(微分 方程、传递函数) 一.实验目的 1) 熟悉Simulink 的工作环境; 2) 掌握Simulink 数学工具箱的使用; 3) 掌握在Simulink 的工作环境中建立系统仿真模型。 二.实验内容 系统微分方程:)(10)(10)(10)(83322t u t y dt t dy dt t y d =++ 系统传递函数:8 328 101010)()()(++==s s s U s Y s G 1)(=t u ,)314sin()(t t u =,)90314sin()(o t t u += 模型 微分方程时的过程 Ut=1时
t u 时)(t 314 ) sin(
t t u+ =时 )(o ) sin( 90 314 传递函数时的过程
u时 t )(= 1 t u=时 )(t sin( 314 )
t t )(o =时 u+ ) sin( 90 314 结论及感想 从两种种不同方法的仿真结果,我们可以瞧出分别用微分方程与传递函数在Simulink中,仿真出来的结果没有很明显的区别,说明两种方法的精度都差不多。但就是,不同的电压源得出的仿真结果不一样,阶跃电源开始时震荡,后来幅度逐渐变小,趋近于1;正弦电源,初相不同时,初始时刻的结果也不相同,有初相时开始震荡会更剧烈,但最后都会变为稳态值,即为正弦值。通过本次实验,我认识到了建模与仿真的一般性方法,收获甚多,也更进一步了解了Matlab,Matlab不仅仅
在平时的编程方面功能强大,在仿真方面也熠熠生辉。
实验四 SIMULINK仿真模型的建立及仿真(一) 一、实验目的: 1、熟悉SIMULINK模型文件的操作。 2、熟悉SIMULINK建模的有关库及示波器的使用。 3、熟悉Simulink仿真模型的建立。 4、掌握用不同的输入、不同的算法、不同的仿真时间的系统仿真。 二、实验内容: 1、设计SIMULINK仿真模型。 2、建立SIMULINK结构图仿真模型。 3、了解各模块参数的设定。 4、了解示波器的使用方法。 5、了解参数、算法、仿真时间的设定方法。 例7.1-1 已知质量m=1kg,阻尼b=2N.s/m。弹簧系数k=100N/m,且质量块的初始位移x(0)=0.05m,其初始速度x’(0)=0m/s,要求创建该系统的SIMULINK 模型,并进行仿真运行。 步骤: 1、打开SIMULINK模块库,在MATLAB工作界面的工具条单击SIMULINK图标,或在MATLAB指令窗口中运行simulink,就可引出如图一所示的SIMULINK模块浏览器。 图一:SIMULINK模块浏览器
2、新建模型窗,单击SIMULINK模块库浏览器工具条山的新建图标,引出如图二所示的空白模型窗。 图二:已经复制进库模块的新建模型窗 3、从模块库复制所需模块到新建模型窗,分别在模块子库中找到所需模块,然后拖进空白模型窗中,如图二。 4、新建模型窗中的模型再复制:按住Ctrl键,用鼠标“点亮并拖拉”积分模块到适当位置,便完成了积分模块的再复制。 5、模块间信号线的连接,使光标靠近模块输出口;待光标变为“单线十字叉”时,按下鼠标左键;移动十字叉,拖出一根“虚连线”;光标与另一个模块输入口靠近到一定程度,单十字变为双十字;放开鼠标左键,“虚连线”变变为带箭头的信号连线。如图三所示:
《MATLAB语言》课程论文 基于MATLAB的基本数字逻辑电路搭建与 仿真 姓名:岳鹏飞 学号:12009243754 专业:电子信息工程 班级:2010级 指导老师:汤全武 学院:物理电气信息学院 完成日期:2011年12月17日
基于MATLAB的基本数字逻辑电路搭建与仿真 (岳鹏飞 12009243754 2010级电子信息工程班) [摘要]数字电路课程中涉及的主要内容是一些分析波形的问题,例如一些基本的逻辑电路。这些问题往往抽象,难于理解,同时不易掌握。而MATLAB语言正是处理这些问题的好帮手。借助MATLAB的Simulink 工具箱,仿真辅助学习,对数字电路的学习将有很大的帮助。此外,利用其可以减少工作量,节约时间,提高工作效率,加深理解,同时可以培养应用能力,加强分析问题、解决问题的能力。本文介绍了利用MATLAB对基本的数字逻辑电路建立完整仿真模型的过程和进行动态仿真的方法,最后给出仿真结果,验证了方法的可行性和模型的正确性。 [关键字]MATLAB Simulink 数字逻辑电路建模仿真 一、问题的提出 MATLAB是英文MATrix LABoratory(矩阵实验室)的缩写。MATLAB是由美国mathworks 公司发布的主要面对科学计算、可视化以及交互式程序设计的高科技计算环境。它将数值分析、矩阵计算、科学数据可视化以及非线性动态系统的建模和仿真等诸多强大功能集成在一个易于使用的视窗环境中,为科学研究、工程设计以及必须进行有效数值计算的众多科学领域提供了一种全面的解决方案,并在很大程度上摆脱了传统非交互式程序设计语言(如C、Fortran)的编辑模式,代表了当今国际科学计算软件的先进水平。它是适合多学科、多种工作平台的功能强大、界面友好、且开放性很强的大型优秀应用软件,同时也是国内外高等院校数学、数值分析、数学建模、数字信号处理、自动控制理论以及工程应用等课程的基本教学和实验仿真工具。 Simulink是MATLAB的重要组成部分。它是Math Works公司于20世纪90年代初开发的,在MATLAB环境下对动态系统进行建模、仿真和分析的一个软件包。“Simulink”一词有两层含义,“Simu”表明它可用于系统仿真;“link”表明它能进行系统连接。在该软件环境下,用户可以在屏幕上调用现成的模块,并将它们适当连接起来以构成系统的模块,即所谓的可视化建模。建模以后,该模型为对象运行Simulink中的仿真程序,可以对模块进行仿真,并可以随时观察仿真结果和干预仿真过程。Simulink由于功能强大、使用简单方便,已成为应用最广泛的动态系统仿真软件。 众所周知,数字电路课程是电类专业一门重要的专业基础课(主干课)。学生学好该课程对后续专业课的学习至关重要。由于该课程涉及的主要内容是一些分析波形的问题,而且抽象,难于理解。借助仿真辅助学习,对课程的学习将有很大的帮助。 数字电路课程中涉及的基本门电路包括非门、与门、与非门、或门、或非门、异或门等,在Simulink库中都可实现。Simulink库中提供了一个Logical Operator模块,将其拖动到所建文件中,双击该模块并合理选择功能,即可很方便的实现基本的逻辑关系。本文旨在使用MATLAB对基本的数字逻辑电路进行建模和仿真,并对仿真结果进行分析和验证。 二、常用模块简介 一个数字系统通常包含有许多数字逻辑电路。根据逻辑功能的不同特点,可以把这些逻辑电路分成两大类,一类叫组合逻辑电路,另一类叫做时序逻辑电路。根据数字电路课程内容,以门电路→组合逻辑电路;触发器→时序逻辑电路为主要内容为思路。 1、主模块(基本逻辑关系)
车辆悬架 四分之一整车模型的Simulink建模与仿真车身质心加速度相对动载荷悬架动行程Simulink建模与仿真
运用simulink 中的状态空间模型计算四分之一车模型的,ACC ,DTL 和SWS 。首先运用吴志成老师一片文献的方法利用simulink 建立路面不平度模型,生成路面谱。 所运用的公式如下: q t =?0.111?v ?q t +0.111?40? G q n 0 ?v 利用上述式子得出路面不平度生成如下所示: 图1 路面谱生成 因为选择的是E 级路面,40KM/h ,因此增益2和3分别为,11.1111和8.5333。此外,限带白噪声功率的大小为白噪声的协方差与采样时间的乘积。又白噪声W E (t)的协方差满足下式: E w E t w E t +τ =2ρ2αvδ(τ) 此处δ(τ)为脉冲函数,并且选择采样时间为0.01s ,则计算可得白噪声功率为8.9*10-3。计算的路面不平度均方根值为0.0531m 。 四分之一车模型根据拉格朗日方程有下式: 状态空间模型:xb=z2 xw=z1 kt=k1 ks=k2 mb=m2 mw=m1 xr=u 建立状态方程和输出方程,在此选取状态变量向量为: X =[z1,z2,z 1 ,z 2]′ 0)()(=-+-+w b s w b b b x x k x x C x M ()()()0w w w b s w b t w r x C x k x x k x x x M +-+-+-=
输入向量为: u=[qt]′则输出向量为 Y=[z2,z2,z1?u? kt m2?g ,z2?z1]′ 建立如下的状态方程和输出方程: X=AX+Bu Y=CX+du 解得A,B,C,D分别为: A= 010 001 ?(k1+k2)/m1 k2/m2 k2/m1 ?k2/m2 ?c/m1c/m1 c/m2?c2/m2 B=[0 0 k1 0]′ C=k2 m2 ? k2 m2 c m2 ? c m2 ; 0 1 0 0; k1 m2g 0 0 0;?1 1 0 0 D=[0 0? k1 0]′ 将各个已知量代入即可得出具体的矩阵。从而有下面的simulink仿真: 图2simulink仿真模型
基于simulink的MSK仿真 学院:计算机与通信工程 班级:通信工程 姓名:王帆 学号: 20081619 指导教师:白媛
目录 一、引言 (2) 1.1绪论 (2) 1.2数字调制方式的发展状况 (2) 1.3设计目的及任务要求 (3) 1.4设计的意义 (3) 二、Matlab基础理论 (4) 2.1 MATLAB 简介 (4) 2.2 MATLAB 的特点及优势 (5) 2.3 Simulink简介 (6) 2.4 MATLAB在通信系统仿真中的应用 (6) 2.4.1 通信仿真的概念 (6) 2.4.2 通信仿真的一般步骤 (6) 三、最小频移键控系统的调制模型及仿真环境 (8) 3.1最小频移键控介绍 (8) 3.1.1最小频移键控- MSK系统与信号特征小结 (8) 3.1.2最小频移键控(MSK) (9) 3.1.3 MSK的理论研究及其原理 (10) 3.2 模型设计原理 (14) 四、系统的建立与仿真 (15) 4.1建立模型 (15) 4.2仿真参数设置 (17)
4.3 Scope端的最终波形图 (18) 五、总结与展望 (19) 5.1总结 (19) 5.2展望 (20)
一、引言 1.1 绪论 20 世纪50 年代后期,随着计算机技术、微电子技术、传感技术,激光技术、卫星通信和移动通信技术、航空航天技术等新技术的发展和应用,尤其近代以计算机为主体的互联网技术的兴起和发展,它们相互结合、相互促进,将人类社会推入到高度信息化时代。通信的目的是传输含有信息的消息。消息有多种形式,话音、文字、数据、符号、图像等等都是消息。原始的数据信号有两种基本形式,一种是模拟的,另一种是数字的。模拟数据信号是在某一数值范围内可以连续取值的信号。数字数据信号是只取有限个离散值的数字序列。由于数字数据更便于存储、处理和传输,而模拟数据经过取样、量化和编码,可以转换成数字数据。因此,模拟数据的传输只有在特定条件下才被使用,而数字数据的应用越来越多。信号的调制方式也由模拟方式持续广泛地向数字方式转换。数字调制有三种基本形式:移幅键控法ASK、移频键控法FSK、移相键控法PSK。在ASK 方式下,用载波的两种不同幅度来表示二进制的两种状态。ASK 方式容易受增益变化的影响,是一种低效的调制技术。在电话线路上,通常只能达到1200bps 的速率。在FSK 方式下,用载波频率附近的两种不同频率来表示二进制的两种状态。在电话线路上,使用FSK 可以实现全双工操作,通常可达1200bps的速率。在PSK 方式下,用载波信号相位移动来表示数据。PSK 可以使用二相或多于二相的相移,利用这种技术可对传输速率起到加倍的作用。 在FSK 调制解调器的使用范围较广,目前已经不完全局限在有线网络通信里。它已经延伸到无线电通信,生物医学,机械等领域。FSK 调制解调器的设计的模型简单,设计方式也不仅仅建立在电器元件上,利用软件搭建模型也成为目前很常用的方法。但是在FSK 方式中,相邻码元的频率不变或者跳变一个固定值,在两个相邻的频率跳变的码元之间,其相位通常是不连续的。如果对FSK 信号做某种改进,使其相位始终保持连续,就产生了MSK 信号,MSK 是FSK 的一种特殊情况。MSK 调制后的波形在时域内具有恒定包络结构,在频域内频谱具有很小的旁瓣,主瓣宽度窄,带外辐射小的优点,并且在主瓣带宽之外功率谱旁瓣的下降也更加迅速,从而克服了一般FSK、PSK、QAM 等调制方式具有相位突变而影响已调
实验四 基于Simulink 进行系统仿真(微 分方程、传递函数) 一.实验目的 1) 熟悉Simulink 的工作环境; 2) 掌握Simulink 数学工具箱的使用; 3) 掌握在Simulink 的工作环境中建立系统仿真模型。 二.实验内容 系统微分方程:)(10)(10)(10)(83322t u t y dt t dy dt t y d =++ 系统传递函数:8 328 101010)()()(++==s s s U s Y s G 1)(=t u ,)314sin()(t t u =,)90314sin()(o t t u += 模型 微分方程时的过程 Ut=1时
t u 时)(t 314 ) sin(
t t u+ =时 )(o ) sin( 90 314 传递函数时的过程
u时 t )(= 1 t u=时 )(t sin( 314 )
t t )(o =时 u+ ) sin( 90 314 结论及感想 从两种种不同方法的仿真结果,我们可以看出分别用微分方程和传递函数在Simulink中,仿真出来的结果没有很明显的区别,说明两种方法的精度都差不多。但是,不同的电压源得出的仿真结果不一样,阶跃电源开始时震荡,后来幅度逐渐变小,趋近于1;正弦电源,初相不同时,初始时刻的结果也不相同,有初相时开始震荡会更剧烈,但最后都会变为稳态值,即为正弦值。通过本次实验,我认识到了建模与仿真的一般性方法,收获甚多,也更进一步了解了
Matlab,Matlab不仅仅在平时的编程方面功能强大,在仿真方面也熠熠生辉。
【实验名称】 Simulink建模与仿真 【实验目的】 1.学习SIMULINK 软件工具的使用方法; 2.用SIMULINK 仿真线性系统; 【实验内容】 1.SIMULINK简介 SIMULINK是MATLAB软件的扩展,它是实现动态系统建模和仿真的一个软件包,它与MATLAB语言的主要区别在于,其与用户交互接口是基于Windows的模型化图形输入,其结果是使得用户可以把更多的精力投入到系统模型的构建,而非语言的编程上。 所谓模型化图形输入是指SIMULINK提供了一些按功能分类的基本的系统模块,用户只需要知道这些模块的输入输出及模块的功能,而不必考察模块内部是如何实现的,通过对这些基本模块的调用,再将它们连接起来就可以构成所需要的系统模型(以.mdl文件进行存取),进而进行仿真与分析。 2.SIMULINK的启动 进入SIMULINK界面,只要你在MA TLAB命令窗口提示符下键入‘SIMULINK’,按回车键即可启动SIMULINK软件。在启动S IMULINK软件之后,SIMULINK的主要方块图库将显示在一个新的Windows中。 如图8-1所示: ?在MA TLAB命令窗口中输入simulink : 结果是在桌面上出现一个称为Simulink Library Browser的窗口,在这个窗口中列出了按功能分类的各种模块的名称。 图8-1 SIMULINK的主要方块图库
3.SIMULINK的模块库介绍 ?SIMILINK模块库按功能进行分为以下8类子库: Continuous(连续模块) Discrete(离散模块) Function&Tables(函数和平台模块) Math(数学模块) Nonlinear(非线性模块) Signals&Systems(信号和系统模块) Sinks(接收器模块) Sources(输入源模块) 4.SIMULINK简单模型的建立 (1)建立模型窗口 (2)将功能模块由模块库窗口复制到模型窗口 (3)对模块进行连接,从而构成需要的系统模型 5.SIMULINK功能模块的处理 (1)模块库中的模块可以直接用鼠标进行拖曳(选中模块,按住鼠标左键不放)而放到模型窗口中进行处理。 (2)在模型窗口中,选中模块,则其4个角会出现黑色标记。此时可以对模块进行以下的基本操作: ?移动:选中模块,按住鼠标左键将其拖曳到所需的位置即可。若要脱离线而移动,可按 住shift键,再进行拖曳; ?复制:选中模块,然后按住鼠标右键进行拖曳即可复制同样的一个功能模块; ?删除:选中模块,按Delete键即可。若要删除多个模块,可以同时按住Shift键,再用 鼠标选中多个模块,按Delete键即可。也可以用鼠标选取某区域,再按Delete键 就可以把该区域中的所有模块和线等全部删除; ?转向:为了能够顺序连接功能模块的输入和输出端,功能模块有时需要转向。在菜单 Format中选择Flip Block旋转180度,选择Rotate Block顺时针旋转90度。或 者直接按Ctrl+F键执行Flip Block,按Ctrl+R键执行Rotate Block。 ?改变大小:选中模块,对模块出现的4个黑色标记进行拖曳即可。 ?模块命名:先用鼠标在需要更改的名称上单击一下,然后直接更改即可。名称在功能模
安康学院 学年论文﹙设计﹚ 题目基于simulink信号与系统的建模与仿真 学生姓名学号 所在院(系) 专业班级 指导教师 年月日
基于simulink的信号与系统建模和仿真 () 指导教师: 【摘要】本文着重论述了如何利用MATLAB Simulink工具在计算机上实现信号与系统分析,通过程序使一些运算量较大、抽象问题简单而直观,详细介绍了利用系统框图模拟实际系统的分析方法,该方法对连续或离散时不变因果系统具有普遍性,借助Matlab/Simulink 仿真工具对基本结构实现了建模和仿真分析。 【关键词】信号与系统、建模、仿真、Simulink Based on simulink modeling and simulation of signal and system Author: ZhangXiu (Grade2011,Class1,Major Electronic information engineering,Ankang University,Ankang 725000, Shaanxi) Directed by Yushunyuan Abstract:This article discusses the methods of realizing signal and system analysis by MATLAB and making complicated arithmetic and abstract problems easy and direct by programs.It introduces an analysis method of simulating actual system by system diagram,which is universal to continuous and discrete time invariable causal system.It realizes modeling and simulation analysis on the basic structures based on Matlab /Simulink simulation tools. Keywords: signal and system; modeling; simulation; Matlab /Simulink 0引言 信号与分析系统是自动化、通信、电信、测控、电子类专业基础课,信号与系统分析就在给定系统的情况下,研究系统在输入不同信号时所产生的响应,由获得的参数,达到对系统的功能和特性的认知。传统的理论分析方法是和数学紧密联合在一起的,初学者不得不把大量的时间和精力浪费在许多繁琐的工程计算上,而忽略了系统的基本概念,对概念模糊。然而在现代实际工程中,对系统进行实验研究时,通常使用数学模型来模拟实际系统,分析不同的信号输入和系统参数改变时,系统响应或性能的变化。而这一切,都是利用计算机技术和各种应用软件强有力的分析手段来完成的。【1】
广西大学实验报告纸 姓名: 电气工程学院自动化2 2011年1月1日 实验内容_______________________________________________指导老师________________ 【实验名称】Simulink建模与仿真 【实验目的】 1.学习SIMULINK 软件工具的使用方法; 2.用SIMULINK 仿真线性系统; 【实验设备】 1) PC机一台 2) MATLAB软件 【实验内容】 1.SIMULINK简介 SIMULINK是MATLAB软件的扩展,它是实现动态系统建模和仿真的一个软件包,它与MATLAB语言的主要区别在于,其与用户交互接口是基于Windows的模型化图形输入,其结果是使得用户可以把更多的精力投入到系统模型的构建,而非语言的编程上。 所谓模型化图形输入是指SIMULINK提供了一些按功能分类的基本的系统模块,用户只需要知道这些模块的输入输出及模块的功能,而不必考察模块内部是如何实现的,通过对这些基本模块的调用,再将它们连接起来就可以构成所需要的系统模型(以.mdl文件进行存取),进而进行仿真与分析。 2.SIMULINK的启动 进入SIMULINK界面,只要你在MA TLAB命令窗口提示符下键入‘SIMULINK’,按回车键即可启动SIMULINK软件。在启动S IMULINK软件之后,SIMULINK的主要方块图库将显示在一个新的Windows中。 如图8-1所示: ?在MA TLAB命令窗口中输入simulink : 结果是在桌面上出现一个称为Simulink Library Browser的窗口,在这个窗口中列出了按功能分类的各种模块的名称。