深圳大学实验报告课程名称:有限元分析方法
实验项目名称:几何建模、网格划分与边界条件施加学院:机电与控制工程学院
专业:机械设计制造及其自动化
指导教师:
报告人:学号:班级:
实验时间:
实验报告提交时间:2011-11- 24
教务处制
悬臂板的模态有限元分析
长:2.5米;
宽:2米;
厚:0.1113米
材料:有机玻璃:
弹性模量:2.35*10^9N/m2;波松比:0 .4
密度:1180kg/m3
边界条件:一断固定、一端自由。
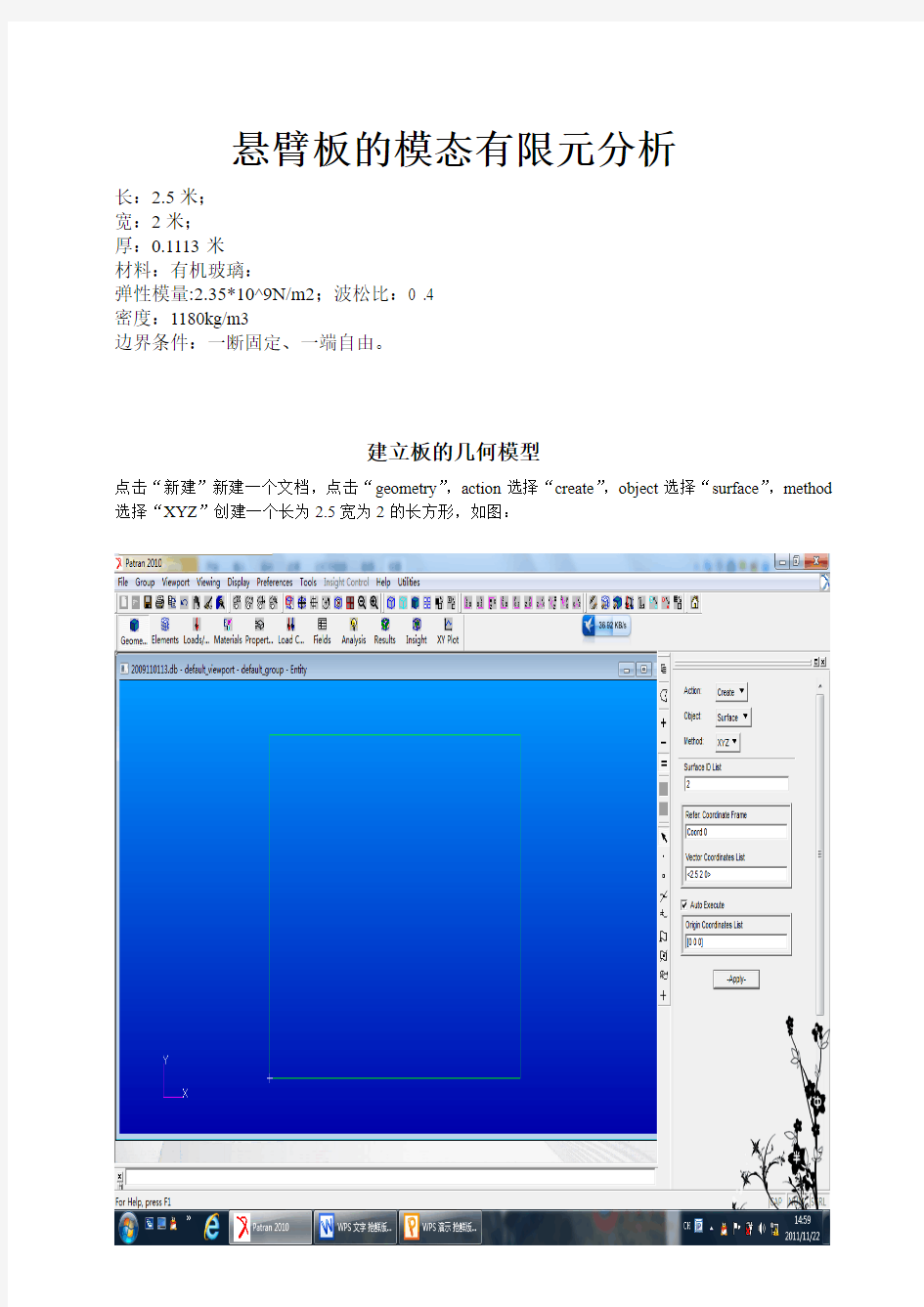
建立板的几何模型
点击“新建”新建一个文档,点击“geometry”,action选择“create”,object选择“surface”,method 选择“XYZ”创建一个长为2.5宽为2的长方形,如图:
划分网格
点击“elements”,action选择“create”,object选择“mesh”,type选择“surface”,其他参数如图,划分表格如图:
建立边界约束
点击“loads/...”,再点击“input data...”进行参数设置如图,再点击“select application region...”,在select 中选择“FEM”选择区域建立边界约束如图:
设置材料特性
点击“material”新建材料有机玻璃(PMMA),点击“input properties...”设置有机玻璃的弹性模量、泊松比和密度,相关参数如图:
定义单元特性1
点击“property”,再点击“input property...”进行参数设置,具体参数如图,进行定义单元特性如图:
定义单元特性2
在property下点击“select application region...”进行参数设置,在select members中选择surface1,点击“add”进行定义单元特征2如图:
定义单元特性3
在property set name中输入PMMA2完成定义单元特征3如图:
解算1
点击“analysis”进行解算操作如图:
解算2设置分析类型及参数
点击“solution type...”,选择“normal modes”完成设置分析类型及参数如图:
解算3:设置分析工况及参数
点击“subsection”,再点击“subsection paramerters ”完成设置工况及参数如图:
解算4:运算求解
点击“apply”进行运算求解如图:
调出计算结果
点击“analysis”,action中选择access results ,其他选择默认,点击“select results file”调出计算结果如图:
各阶模态:频率、振型
点击results,选择各阶相应的参数进行各阶模态:频率、振型如图:
指导教师批阅意见:
成绩评定:
指导教师签字:
年月日备注:
——JOURNAL OF CHONGQING THREE GORGES UNIVERSITY 2006年第3期 第22卷——No.3. 2006 Vol.22. 收稿日期:2006-02-05 作者简介:刘福明(1967-),男,重庆万州人,重庆三峡学院数学与计算机科学学院副教授,在读硕士。 网格与存储 刘福明 黄 河 应 宏 (重庆三峡学院数学与计算机科学学院,重庆万州 404000) 摘 要:网格把整个网络整合成一台巨大的超级计算机,实现计算资源、存储资源、数据资源、信息资源、知识资源及专家资源的全面共享。网格计算的基础是存储,网格中的每一个运算都必须有强大的存储功能提供支持。本文针对网格环境下的存储技术及其发展进行了论述。 关键词:网格;网格存储;虚拟化存储;存储公用设施模型 中图分类号:TP333 文献标识码:A 文章编号:1009-8135(2006)03-0028-02 网格出现于20世纪90年代,它的目标是实现网络虚拟环境下的高性能资源共享和协同工作,共同完成一些缺乏有效研究办法的重大应用研究问题。它不仅实现了对各种计算资源的访问,而且实现了对所有数据资源的统一访问。被人们称为“网格计算之父”的Ian Foster 在《The Grid : Blueprint for a Future Computing Infrastructure 》中这样给网格下定义:“网格是构筑在互联网上的一组新兴技术,它将高速互联网、高性能计算机、大型数据库、传感器、远程设备等融为一体,为科技人员和普通老百姓提供更多的资源、功能和交互性。互联网主要为人们提供电子邮件、网页浏览等通信功能,而网格功能则更多更强,让人们透明地使用计算、存储等其他资源”。 网格将改变传统的Client/Server 和Client/Cluster 结构,形成新的Pervasive/Grid 体系结构,这种体系结构使用户把整个网络视为一个巨大的计算机,并从中享受一体化的、动态变化的、可灵活控制的、智能的、协作式信息服务。 1.网格与虚拟化存储 1.1 网格体系结构 网格体系结构主要有两种:五层沙漏结构、开放网格服务体系结构OGSA 。 五层沙漏结构的基本思想是以协议为中心,强调服务、API (Application Programming Interfaces )与SDK (Software Development Kits )的重要性。 根据各组成部分与共享资源的距离,将对共享资源进行操作,管理和使用的功能分散在5个不同的层次:构造层(Fabric )、连接层(Connectivity )、资源层(Resource )、汇集层(Collective )、应用层(Applications )。在此结构中,越向下层就越接近于物理的共享资源,与特定资源相关的成分就越多,越向上层就越感觉不到共享资源的细节特征,对共享资源的表示也就越抽象,因此就不需要关心与底层资源相关的具体实现问题。 开放网格服务体系结构OGSA (Open Grid Service Architecture )的基本思想是以服务为中心,在OGSA 中一切都是服务。这里的服务是指具有特定功能的网络化实体,包括各种计算资源、存储资源、网络、程序和数据库等。网格服务是一种Web Service ,其提供了一组接口,网格服务将通过定义接口来完成不同的功能。因此其可以简单地表示为“网络服务=接口/行为+服务数据”。 1.2网格与虚拟化存储 网格系统由三个基本层次组成,即资源层、中间件层和应用层。资源层包括各种计算机资源,如各类
向量法解立体几何 用传统的方法解立体几何需要烦琐的分析、复杂的计算。而用向量法解题思路清晰、过程简洁。对立体几何的常见问题都可以起到化繁为简,化难为易的效果。 一. 证明两直线平行 已知两直线a 和b , b D C a B A ∈∈,,,,则?b a //存在唯一的实数λ使CD AB λ= 二. 证明直线和平面平行 1.已知直线αα∈∈?E D C a B A a ,,,,,且三点不共线,则a ∥?α存在有序实数 对μλ,使CE CD AB μλ+= 2.已知直线,,,a B A a ∈?α和平面 α的法向量n ,则a ∥n AB ⊥?α 三.证明两个平面平行 已知两个不重合平面βα,,法向量分别为n m ,,则α∥n m //?β 四.证明两直线垂直 已知直线b a ,。b D C a B A ∈∈,,,,则0=??⊥CD AB b a 五.证明直线和平面垂直 已知直线α和平面a ,且A 、B a ∈,面α的法向量为m ,则m AB a //?⊥α 六.证明两个平面垂直 已知两个平面βα,,两个平面的法向量分别为n m ,,则n m ⊥?⊥βα 七.求两异面直线所成的角 已知两异面直线b a ,,b D C a B A ∈∈,,,,则异面直线所成的角θ 为:CD AB ?=θcos 八.求直线和平面所成的角 A B
已知A,B 为直线a 上任意两点,n 为平面α的法向量,则a 和平面α所成的角θ为: 1. 当??? ? ??2, 0π 时?-=2πθ 2. 当??? ??∈?ππ,2 时2πθ-?= 九.求二面角 1.已知二面角βα--l ,且l CD l AB D C B A ⊥⊥∈∈,,,,且βα,则二面角的平面角θ 的大小为:=θ 2.已知二面角,βα--l n m ,分别为面βα,的法向量,则二面角的平面角θ的 大小与两个法向量所成的角相等或互补。即-=πθ 注:如何判断二面角的平面角和法向量所成的角的关系。 (1)通过观察二面角锐角还是钝角,再由法向量的成的角求之。 (2)通过观察法向量的方向,判断法向量所成的角与二面角的平面角相等还是互补。 十.求两条异面直线的距离 已知两条异面直线b a ,,m 是与两直线都垂直的向量,b B a A ∈∈,则两条 异面直线的距离d = 十一.求点到面的距离 已知平面α和点A,B 且αα∈?B A ,,m 为平面α的法向量,则点A 到平面 α 的距离d =
有限元分析中的网格划分好坏直接关系到模型计算的准确性。本文简述了网格划分应用的基本理论,并以ANSYS限元分析中的网格划分为实例对象,详细讲述了网格划分基本理论及其在工程中的实际应用,具有一定的指导意义。 1 引言 ANSYS有限元网格划分是进行数值模拟分析至关重要的一步,它直接影响着后续数值计算分析结果的精确性。网格划分涉及单元的形状及其拓扑类型、单元类型、网格生成器的选择、网格的密度、单元的编号以及几何体素。从几何表达上讲,梁和杆是相同的,从物理和数值求解上讲则是有区别的。同理,平面应力和平面应变情况设计的单元求解方程也不相同。在有限元数值求解中,单元的等效节点力、刚度矩阵、质量矩阵等均用数值积分生成,连续体单元以及壳、板、梁单元的面内均采用高斯(Gauss)积分,而壳、板、梁单元的厚度方向采用辛普生(Simpson)积分。辛普生积分点的间隔是一定的,沿厚度分成奇数积分点。由于不同单元的刚度矩阵不同,采用数值积分的求解方式不同,因此实际应用中,一定要采用合理的单元来模拟求解。 2 ANSYS网格划分的指导思想 ANSYS网格划分的指导思想是首先进行总体模型规划,包括物理模型的构造、单元类型的选择、网格密度的确定等多方面的内容。在网格划分和初步求解时,做到先简单后复杂,先粗后精,2D单元和3D单元合理搭配使用。为提高求解的效率要充分利用重复与对称等特征,由于工程结构一般具有重复对称或轴对称、镜象对称等特点,采用子结构或对称模型可以提高求解的效率和精度。利用轴对称或子结构时要注意场合,如在进行模态分析、屈曲分析整体求解时,则应采用整体模型,同时选择合理的起点并设置合理的坐标系,可以提高求解的精度和效率,例如,轴对称场合多采用柱坐标系。有限元分析的精度和效率与单元的密度和几何形状有着密切的关系,按照相应的误差准则和网格疏密程度,避免网格的畸形。在网格重划分过程中常采用曲率控制、单元尺寸与数量控制、穿透控制等控制准则。在选用单元时要注意剪力自锁、沙漏和网格扭曲、不可压缩材
常见几何体的面积、体积求法与应用 要计算某材料的密度、重量,研究某物体性能及其物质结构等,特别对于机械专业的学生,必须要求工件的面积、体积等,若按课本上公式来计算,而课本上公式不统一,不好记住,并且很繁杂,应用时要找公式,对号入座很麻烦。笔者在教学与实践中总结出一种计算常见几何体的面积、体积方法。其公式统一,容易记住,且计算简单。对技校学生来说,排除大部分繁琐的概念、定理,以及公式的推导应用等。 由统计学中的用加权平均数对估计未来很准确。比如,估计某商品下个月销售量,若去年平均销售量为y ,设本月权为4,上月权数为1,下月权数为1,各月权数分别乘销售量相加后除以6等于y 。这样能准确地确定下个月销售量。能不能以这种思想方法用到求几何体的面积、体积呢?通过推导与实践,对于常见的几何体确实可用这种方法来求得其面积、体积。下面分别说明求常见几何体的面积、体积统一公式的正确性与可用性。 常见几何体的面积、体积统一公式: ) 4(6 )4(621002100S S S h V C C C h A ++= ++= (其中A 为几何体侧面积,C 0为上底面周长,C 1为中间横截面周长,C 2 为下底面周长,V 为几何体体积,S 0为上底面面积,S 1为中间横截面面积,S 2为下底面面积,h 为高,h 0为斜高或母线长。注:中间横截面为上、下底等距离的截面。) 一、棱柱、棱锥、棱台、圆柱、圆锥、圆台的面积 、体积用统一公式的正确性 1、棱柱: ⑴据棱柱上底周长、下底周长、中间横截面周长相等,即2 1 C C C ==, 可得: 2020210066 )4(6 C h C h C C C h =?= ++,这与课本中的棱柱侧面积公式等同。 以下每个几何体都能推得与课本中相应公式等同,说明这统一公式的正确性。 ⑵据棱柱上底面、下底面、中间横截面相等,可知:2 1 S S S ==,即: h S S S S h S S S h V 2222210)4(6 )4(6 =++= ++= 。 2、棱锥 ⑴设底边长为a 2,边数为n ,斜高为h 0,侧面三角形中位线为a 1,则
本篇校对说明 一.请依下述顺序排列各部份顺序 总论 CT MRI 神经系统 胸部 腹部 骨与关节 介入放射学 二.P3“肿块效应”条目移至总论节“伪影”条目之后。 三.为了不使手工修正误解,已另作出一份修正样本。附后 祁吉 09-07
基本概念是理解放射诊断学及相关内容的基础。医学是介于自然科学与社会科学之间的学科,因此基本概念还是需要在理解的基础上“死记硬背”的。本书中仅列出日常应用较多的120个基本概念,一些概念可以举一反三。实际操作中,涉及的基本概念远不止这些,需在实践中不断扩大理解和记忆。在学科进步中,一些概念的内涵还会发生变化,因此,对概念的理解还应随科学认识的发展不断修正。 总论 【X线的物理学效应】 X线的物理学效应(physical effect of X-ray)有:穿透性,荧光效应,感光效应,电离效应,光电效应,热效应,干涉、衍射、反射、折射、散射效应等。 【高仟伏X线】 高仟伏X线(high kilovoltage X-ray):波
长在0.12-0.05?(0.012-0.005nm)、光子能量为66~166KeV的高能X线。产生该波段X线的管电压为120-250kVp。应用高仟伏X线摄影可提供在较小密度范围内层次丰富的照片。 【软X线】 软X线(soft X-ray):波长在0.74-0.046nm(0.74-0.46?)范围、光子能量为17-26keV的低能量X线。由软X线机产生,产生该波段X线的管电压在25-40kVp。由于软X线的穿透能力小,临床上适用于软组织摄影。 【传统放射学】 传统放射学(conventional radiology):以X线透视和摄片为基本检查方法的医学成像科学。在现代医学成像方法(CT/MRI/DSA等)出现之前,这些基本检查方法已经沿用和不断改良了近80年,其中大部份至今仍在沿用,故统称以这些基本检查方法为基础的医学成像科学为传统放
立体几何与平面几何计算公式 初中数学几何中,不论是平面几何还是立体几何,他们的计算公式是我们进行数学试题计算的基础,因此,希望中考考生积极的做好几何计算公式的复习。下面是初中数学几何计算公式,一起了解一下: 1 、正方形 C:周长S:面积:a:边长 周长=边长×4 C=4a 正方形面积=边长×边长S= a a 2 、长方形C:周长S:面积a:边长 周长=(长+宽)×2 C = 2(a+b) 长方形面积=长×宽S = a b 3 、三角形s:面积a:底h:高 三角形面积=底×高÷2 s = ah÷2 4 、平行四边形s:面积a:底h:高 平行四边形面积=底×高s = ah 5、梯形s面积a上底b下底h高 梯形面积=(上底+下底)×高÷2 s = (a+b) h÷2 6 、圆形r:半径d:直径c:周长s:面积 半径=直径÷2 r = d/2 半径=周长÷圆周率÷2 r = c/2π 直径=半径×2 d = 2r 直径=周长÷圆周率d = c/π
周长=圆周率×直径 c = πd 周长=圆周率×半径×2 c = 2πr 圆面积=圆周率×半径×半径s = πr r 圆环面积=圆周率×(大圆半径×大圆半径-小圆半径×小圆半径) s=π(R R-r r) 7 、长方体V:体积s:面积a:长b: 宽h:高 体积=长×宽×高V = abh 8、正方体V:体积a:棱长 总棱长=棱长×12 C = 12a 表面积=棱长×棱长×6 S表= a a6 体积=棱长×棱长×棱长V = a a a 9、圆柱体V:体积s:底面积h:高 圆柱体侧面积=底面周长×高s= c h 圆柱体体积=底面积×高V= sh 圆柱体体积=圆周率×半径×半径×高V =πr r h 圆柱体体积=1/2×侧面积×半径V =1/2s侧r 10、圆锥体V:体积s:底面积h:高 圆锥体体积=1/3×底面积×高V = 1/3sh 圆锥体体积=1/3×圆周率×半径×半径×高V = 1/3×πr r h
一个网格划分实例的详解 该题目条件如下图所示: Part 1:本部分将平台考虑成蓝色的虚线 1. 画左边的第一部分,有多种方案。 方法一:最简单的一种就是不用布置任何初始的2dmesh直接用one volume 画,画出来的质量相当不错。 One volume是非常简单而且强大的画法,只要是一个有一个方向可以 mapped的实体都可以用这个方法来画网格,而事实上,很多不能map的单元也都可以用这个命令来画,所以在对三维实体进行网格划分的时候,收件推荐用one volume来试下效果,如果效果不错的话,就没有必要先做二维单元后再来画。 方法二:先在其一个面上生成2D的mesh,在来利用general选项,这样的优点是可以做出很漂亮的网格。
相比之下:方法二所做出来的网格质量要比一要高。 2. 画第二段的网格,同样演示两种方法: 方法一:直接用3D>solid map>one volume 方法二:从该段图形来看,左端面实际上由3个面组成,右端面由一个部分组成,故可以先将左端面的另两个部分的面网格补齐,再用general选项来拉伸,但是,问题是左面砖红色的部分仅为3D单元,而没有可供拉伸的源面网格,故,应该先用face命令生成二维网格后,再来拉伸,其每一步的结果分见下:
在用general选项时,有个问题需要注意:在前面我们说过,source geom和elemes to drag二选一都可以,但是这里就不一样了,因为source geom选面的话,只能选择一个面,而此处是3个面,所以这里只能选elemes to drag而不能选择source geom.
第2章数字图像的基础知识和基本概念 一、数字图像 数字图像是以二进制数字组形式表示的二维图像。利用计算机图形图像技术以数字的方式来记录、处理和保存图像信息。在完成图像信息数字化以后,整个数字图像的输入、处理与输出的过程都可以在计算机中完成,它们具有电子数据文件的所有特性。通常把计算机图形主要分为两大类:位图(bitmap)图像和矢量(vector)图形(如图2-1所示)。 图2-1 计算机图形的主要分类 1.关于位图图像 (1)概念 位图图像(在技术上称作栅格图像)使用图片元素的矩形网格(像素)表现图像。每个像素都分配有特定的位置和颜色值。在处理位图图像时,人们所编辑的是像素。位图图像是连续色调图像(如照片或数字绘画)最常用的电子媒介,因为它们可以更有效地表现阴影和颜色的细微层次。 (2)分辨率 位图图像与分辨率有关,也就是说它们包含固定数量的像素。因此,如果在屏幕上以高缩放比率对它们进行缩放或以低于创建时的分辨率来打印它们,则将丢失其中的细节,并会呈现出锯齿,如图2-2所示。 图2-2 不同放大级别的位图图像示例 (3)特点 ①位图图像有时需要占用大量的存储空间。对于高分辨率的彩色图像,由于像素之间独
立,所以占用的硬盘空间、内存和显存比矢量图都大。 ②位图放大到一定倍数后会产生锯齿。位图的清晰度与像素点的多少有关。 ③位图图像在表现色彩、色调方面的效果比矢量图更加优越,尤其在表现图像的阴影和色彩的细微变化方面效果更佳。 ④位图的格式有bmp、jpg、gif、psd、tif、png等。 ⑤处理软件:Photoshop、ACDSee、画图等。 2.关于矢量图形 (1)概念 矢量图形(又称矢量形状或矢量对象)是由称作矢量的数学对象定义的直线和曲线构成的。矢量根据图像的几何特征对图像进行描述。 (2)分辨率 矢量图形是与分辨率无关的,即当调整矢量图形的大小、将矢量图形打印到PostScript 打印机、在PDF文件中保存矢量图形或将矢量图形导入到基于矢量的图形应用程序中时,矢量图形都将保持清晰的边缘(如图2-3所示)。 图2-3 不同放大级别的矢量图形示例 (3)特点 ①矢量图形可以任意放大和缩小,图形不模糊,不会丢失细节或影响清晰度,不会产生锯齿效果。因此,对于将在各种输出媒体中按照不同大小使用的图稿(如徽标),矢量图形是最佳选择,常用于标志设计、VI设计、字体设计等。 ②矢量图形中保存的是线条和图块的信息,所以矢量图形文件与分辨率和图像大小无关,只与图像的复杂程度有关,图像文件所占的存储空间较小。 ③可采取高分辨率印刷。矢量图形文件可以在任何输出设备(如打印机)上以打印或印刷的最高分辨率进行打印输出。 ④矢量图可以作为图像元素导入Photoshop里使用,它会很好地适应于导入图像的分辨率。 ⑤在Photoshop里的一些矢量工具,比如:钢笔(路径)、文字、形状等在图像处理和创意中都发挥着重要的作用。 3.像素 (1)像素定义 像素(Pixel)是用来计算数字图像的一种单位。数字图像连续性的浓淡阶调是由许多色彩相近的小方点组成,这些小方点就是构成数字图像的最小单位“像素”。越高位的像素,其拥有的色板也就越丰富,越能表达颜色的真实感。人们也经常用点来表示像素,因此PPI 有时缩写为DPI(dots per inch)。用来表示一幅图像的像素越多,结果就更接近原始的图像,即图像的精度越高。 (2)关于像素的扩展
空间角和距离的计算(1) 一 线线角 1.直三棱柱A 1B 1C 1-ABC ,∠BCA=900,点D 1,F 1分别是A 1B 1和A 1C 1的中点,若BC=CA=CC 1,求BD 1与AF 1所成角的余弦值. 2.在四棱锥P-ABCD 中,底面ABCD 是直角梯形,∠BAD=900,AD ∥BC ,AB=BC=a ,AD=2a ,且PA ⊥面ABCD ,PD 与底面成300角. (1)若AE ⊥PD ,E 为垂足,求证:BE ⊥PD ; (2)若AE ⊥PD ,求异面直线AE 与CD 所成角的大小. 二.线面角 1.正方体ABCD-A 1B 1C 1D 1中,E ,F 分别为BB 1、CD 的中点,且正方体的棱长为2. (1)求直线D 1F 和AB 和所成的角; (2)求D 1F 与平面AED 所成的角. F 1D 1B 1 C 1A 1 B A C A B C D P E C D E F D 1 C 1 B 1 A 1 A B
2.在三棱柱A 1B 1C 1-ABC 中,四边形AA 1B 1B 是菱形,四边形BCC 1B 1是矩形,C 1B 1⊥AB ,AB=4,C 1B 1=3,∠ABB 1=600,求AC 1与平面BCC 1B 1所成角的大小. 三.二面角 1.已知A 1B 1C 1-ABC 是正三棱柱,D 是AC 中点. (1)证明AB 1∥平面DBC 1; (2)设AB 1⊥BC 1,求以BC 1为棱,DBC 1与CBC 1为面的二面角的大小. 2.ABCD 是直角梯形,∠ABC=900,SA ⊥面ABCD ,SA=AB=BC=1,AD=0.5. (1)求面SCD 与面SBA 所成的二面角的大小; (2)求SC 与面ABCD 所成的角. 3.已知A 1B 1C 1-ABC 是三棱柱,底面是正三角形,∠A 1AC=600,∠A 1AB=450,求二面角B —AA 1—C 的大小. B 1 C 1 A 1 B A C D B 1 C 1 A 1B A C B A D C S B 1 C 1 B C A 1
不四 s = —+ 爲Mu = =££sin B 2 2 边形 不四 平边 行形 a. b. c. d —各边长險、爲rsi s -面积右、必一对角线 [H^hY^bh + cH 2 H, 曰-面枳 € _ a£K abc % 4」戸(尹_&)〔戸 _&)(尹_亡) P-三边和之半 s-三角形囲积 艮-三角形外接圆半径 外 切 角 形 直 角 角 形 尸=匚石一刁 ■S _ 血 P V F P-三边和之半 2 -三角形面积 r -三角形内切圆半径 以=胪亠阱弘b -直角边 c = 3十戸? _斜边 1 , "尹占-面积 c -J/ ■n?十2&曰a'b^ -各边长
隅 角 0 ]073t a s - 面积 d -短轴D - 长轴匸-短 半轴 R -长半轴 扇 形 ISO* -°01745^ 亠二喫 2 360 半径 圆心角= 0.008727r^* 弓-面积
正 六 E 体 正 十 _____ L 面 体 正 多 边 形 (六个正方形 ) 口 -边 数 a - 一边之长 R -外接圆半径 r 内切圆半径 e-巒 财之 1D 心角 顶 用 官-面 积 D -周良 tzFhj u 〔教目) F=6a 2 棱顶点 12 3 丁 = / C 数 目) 稜腆点 30 20 正 立 方 体 截 头 直 锥 (十二个五甬形)爲 柱 卩二 20.6457^ r= 7.663 la 5 F = 6a 2 C L □ -边 长 d-对角线长 = 7^" = 1732^1 。=扌心1 +比) 尸=#餉+宀) + s i 十巧 衍“2 —两端周 围的长 £ L-S 2 —两端的 面积 $二gk 十邑+ J 远”叼) C* P -宜截断面周长 F = ^/ + 2s h - 高 V = sh 目-底面积
虽然做出来了.但是我还是有一个问题想请教大家: vsweep和mapp分网后形成网格各有什么规律?如何结合两种方法划分出整齐规则的网格呢. 比如:为什么图中的(1)部分用MAPP划分,(2)部分用SWEEP划分呢就可以出现上图中的那种整齐规则的网格?反过来(1)部分用SWEEP,(2)部分用MAPP划分就不会出现整齐规则的网格呢? 部分(1)和部分(2)不可看成一个整体划分吗? 我试了一个,如果把两个部分看成整体,可以分网但是不会出现那种整齐的网格. 只有掌握了生成网格规律才容易得到合理,整齐,规则的网格,总不能分网时把各种方法都试一遍吧. 恳请各位谈点自己的在分网方面的经验.谢谢 1的三个边如果都设了分段数则sweep和map是一样的 et,1,42 et,2,45 cyl4,,,20 lsel,all lesize,all,,,10
esize,,10 vext,1,,,,,20 aclear,all amesh,1 不过好象中间不大好的!!!还望高手指点! 命令流; et,1,42 et,2,45 blc4,,,10,5 lesize,1,,,5 lesize,2,,,10 mshape,0,2d mshkey,1 amesh,1 esize,,5 vrotat,1,,,,,,1,4 aclear,all
用map也可以,,取其四分之一,单元大小可控制!做了一个!
/PREP7 CYL4, , ,5 RECTNG,-1,1,-1,1, FLST,2,2,5,ORDE,2 FITEM,2,1 FITEM,2,-2 AOVLAP,P51X wpro,,90.000000, wpro,,,45.000000 ASBW, 3 wpro,,,-45.000000 wpro,,,-45.000000 FLST,2,2,5,ORDE,2 FITEM,2,1 FITEM,2,4 ASBW,P51X wpro,,,45.000000 wpro,,90.000000, ET,1,PLANE42 ESIZE,1,0, AMAP,6,12,9,7,8 WPSTYLE,,,,,,,,0 AMAP,7,12,10,5,8 AMAP,3,10,11,6,5 AMAP,5,6,7,9,11 AMAP,2,8,5,6,7 TYPE, 1 EXTOPT,ESIZE,10,0, EXTOPT,ACLEAR,0 EXTOPT,ATTR,0,0,0 MAT,_Z2 REAL,_Z4 ESYS,0 ET,2,SOLID45 TYPE, 2 EXTOPT,ESIZE,10,0, EXTOPT,ACLEAR,0 EXTOPT,ATTR,0,0,0 MAT,_Z2 REAL,_Z4 ESYS,0 VOFFST,2,5, , VOFFST,6,5, , VOFFST,7,5, ,
1.广域网覆盖范围从几十千米到几千千米,可以将一个国家、地区或横跨几个洲的计算机和网络互联起来的网络 2.城域网可以满足几十公里范围内的大量企业、机关、公司的多个局域网互联的需要,并能实现大量用户与数据、语音、图像等多种信息传输的网络。 3.局域网用于有限地理范围(例如一幢大楼),将各种计算机、外设互连的网络。 4.无线传感器网络一种将Ad hOC网络技术与传感器技术相结合的新型网络 5.计算机网络以能够相互共享资源的方式互联起来的自治计算机系统的集合。 6.网络拓扑通过网中结点与通信线路之间的几何关系来反映出网络中各实体间的结构关系 7.ARPANET 对Internet的形成与发展起到奠基作用的计算机网络 8.点对点线路连接一对计算机或路由器结点的线路 9.Ad hOC网络一种特殊的自组织、对等式、多跳、无线移动网络。 10.P2P所有的成员计算机在不同的时间中,可以充当客户与服务器两个不同的角色,区别于固定服务器的网络结构形式 1.0SI参考模型由国际标准化组织IS0制定的网络层次结构模型。 2.网络体系结构.计算机网络层次结构模型与各层协议的集合。 3.通信协议为网络数据交换而制定的规则、约定与标准。 4.接口同一结点内相邻层之间交换信息的连接点。 5.数据链路层该层在两个通信实体之间传送以帧为单位的数据,通过差错控制方法,使有差错的物理线路变成无差错。 6.网络层负责使分组以适当的路径通过通信子网的层次。 7.传输层负责为用户提供可靠的端到端进程通信服务的层次。 8.应用层.0SI参考模型的最高层。 1.基带传输在数字通信信道上直接传输基带信号的方法 2.频带传输利用模拟通信信道传输数字信号的方法 3.移频键控通过改变载波信号的角频率来表示数据的信号编码方式 4.振幅键控通过改变载波信号的振幅来表示数据的信号编码方式 5.移相键控通过改变载波信号的相位值来表示数据的信号编码方式。 6.单模光纤光信号只能与光纤轴成单个可分辨角度实现单路光载波传输的光纤 7.多模光纤光信号可以与光纤轴成多个可分辨角度实现多路光载波传输的光纤 8.单工通信在一条通信线路中信号只能向一个方向传送的方法 9.半双工通信在一条通信线路中信号可以双向传送,但同一时间只能向一个方向传送数据 10.全双工通信在一条通信线路中可以同时双向传输数据的方法 11.模拟信号信号电平连续变化的电信号 12.数字信号用0、1两种不同的电平表示的电信号 13.外同步法发送端发送一路数据信号的同时发送一路同步时钟信号 14.内同步法从自含时钟编码的发送数据中提取同步时钟的方法 15.波分复用在一根光纤上复用多路光载波信号 16.脉冲编码调制. 将语音信号转换为数字信号的方法 1.纠错码让每个传输的分组带上足够的冗余信息,以便在接收端能发现并自动纠正传输差错的编码方法 2.检错码让分组仅包含足以使接收端发现差错的冗余信息,但是不能确定哪个比特出错,并且自己不能纠正传输差错的编码方法。 3.误码率二进制比特在数据传输系统中被传错的概率 4.帧数据链路层的数据传输单元 5.数据链路层协议为实现数据链路控制功能而制定的规程或协议。
N维空间几何体质心的计算方法 摘要:本文主要是求一个图形或物体的质心坐标的问题,通过微积分方面的知识来求解,从平面推广到空间,问题也由易到难。首先提出质心或形心问题,然后给出重心的定义,再由具体的例子来求解相关问题。 关键字:质心重心坐标平面薄板二重积分三重积分 一.质心或形心问题: 这类问题的核心是静力矩的计算原理。 1.均匀线密度为M的曲线形体的静力矩与质心: 静力矩的微元关系为 , dMx yudl dMy xudl ==. 其中形如曲线L( (, y f x a x b =≤≤的形状体对x轴与y轴的静力矩分别 为( b
a y f x S = ? , ( b y a M u f x =? 设曲线AB L 的质心坐标为( ,x y,则,, y x M M x y
M M == 其 中( b a M u x d x u l == ? 为AB L 的质量,L为曲线弧长。若在式 y M x M
= 与式 x M y M = 两端同乘以2π,则可得 到22( b a y xl f x S ππ == ? ,
22( b a x yl f x S ππ == ? ,其中x S 与y S 分别表示曲线AB L 绕x轴与y轴旋转而成的旋转体的侧面积。 2.均匀密度平面薄板的静力矩与质心: 设f(x为 [],a b 上的连续非负函数,考虑形如区域 {} (,,0(
D x y a x b y f x =≤≤≤≤ 的薄板质心,设M为其密度,利用微元法,小曲边梯形MNPQ的形心坐标为1 (,(, 2 y f y x y x x ≤≤+? ,当分割无限细化时,可当小曲边梯形MNPQ的质量视为集中于点 1 (,( 2 x f x 处的一个质点,将它对x轴与y轴分别取静力矩微元可有 1 (( 2 x dM u f x f x dx
一、前言 有限元网格划分是进行有限元数值模拟分析至关重要的一步,它直接影响着后续数值计算分析结果的精确性。网格划分涉及单元的形状及其拓扑类型、单元类型、网格生成器的选择、网格的密度、单元的编号以及几何体素。从几何表达上讲,梁和杆是相同的,从物理和数值求解上讲则是有区别的。同理,平面应力和平面应变情况设计的单元求解方程也不相同。在有限元数值求解中,单元的等效节点力、刚度矩阵、质量矩阵等均用数值积分生成,连续体单元以及壳、板、梁单元的面内均采用高斯(Gauss)积分,而壳、板、梁单元的厚度方向采用辛普生(Simpson)积分。辛普生积分点的间隔是一定的,沿厚度分成奇数积分点。由于不同单元的刚度矩阵不同,采用数值积分的求解方式不同,因此实际应用中,一定要采用合理的单元来模拟求解。 CAD软件中流行的实体建模包括基于特征的参数化建模和空间自由曲面混合造型两种 方法。Pro/E和SoildWorks是特征参数化造型的代表,而CATIA与Unigraphics等则将特征参数化和空间自由曲面混合造型有机的结合起来。现有CAD软件对表面形态的表示法已经大大超过了CAE软件,因此,在将CAD实体模型导入CAE软件的过程中,必须将CAD 模型中其他表示法的表面形态转换到CAE软件的表示法上,转换精度的高低取决于接口程序的好坏。在转换过程中,程序需要解决好几何图形(曲线与曲面的空间位置)和拓扑关系(各图形数据的逻辑关系)两个关键问题。其中几何图形的传递相对容易实现,而图形间的拓扑关系容易出现传递失败的情况。数据传递面临的一个重大挑战是,将导入CAE程序的CAD模型改造成适合有限元分析的网格模型。在很多情况下,导入CAE程序的模型可能包含许多设计细节,如细小的孔、狭窄的槽,甚至是建模过程中形成的小曲面等。这些细节往往不是基于结构的考虑,保留这些细节,单元数量势必增加,甚至会掩盖问题的主要矛盾,对分析结果造成负面影响。 CAD模型的“完整性”问题是困扰网格剖分的障碍之一。对于同一接口程序,数据传递的品质取决于CAD模型的精度。部分CAD模型对制造检测来说具备足够的精度,但对有限元网格剖分来说却不能满足要求。值得庆幸的是,这种问题通常可通过CAD软件的“完整性检查”来修正。改造模型可取的办法是回到CAD系统中按照分析的要求修改模型。一方面检查模型的完整性,另一方面剔除对分析无用的细节特征。但在很多情况下,这种“回归”很难实现,模型的改造只有依靠CAE软件自身。CAE中最直接的办法是依靠软件具有的“重构”功能,即剔除细部特征、缝补面和将小面“融入”大曲面等。有些专用接口在模型传递过程中甚至允许自动完成这种工作,并且通过网格剖分器检验模型的“完整性”,如发现“完整性”不能满足要求,接口程序可自动进行“完整性”修复。当几何模型距CAE分析的要求相差太大时,还可利用CAE程序的造型功能修正几何模型。“布尔运算”是切除细节和修理非完整特征的有效工具之一。 目前数据传递一般可通过专用数据接口,CAE程序可与CAD程序“交流”后生成与CAE 程序兼容的数据格式。另一种方式是通过标准图形格式如IGES、SAT和ParaSolid传递。现有的CAD平台与通用有限元平台一般通过IGES、STL、Step、Parasolid等格式来数据
各种网格划分方法 1.输入实体模型尝试用映射、自由网格划分,并综合利用多种网格划分控制方法 本题提供IGES 文件 1. 以轴承座为例,尝试对其进行映射,自由网格划分,并练习一般后处理的多种技术,包 括等值图、云图等图片的获取方法,动画等。 2. 一个瞬态分析的例子 练习目的:熟悉瞬态分析过程 瞬态(FULL)完全法分析板-梁结构实例 如图所示板-梁结构,板件上表面施加随时间变化的均布压力,计算在下列已知条件下结构的瞬态响应情况。 全部采用A3钢材料,特性: 杨氏模量=2e112/m N 泊松比=0.3 密度=7.8e33 /m Kg 板壳: 厚度=0.02m 四条腿(梁)的几何特性: 截面面积=2e-42m 惯性矩=2e-84m 宽度=0.01m 高度=0.02m 压力载荷与时间的 关系曲线见下图所示。 图 质量梁-板结构及载荷示意图 0 1 2 4 6 时间(s ) 图 板上压力-时间关系 分析过程 第1步:设置分析标题 1. 选取菜单途径Utility Menu>File>Change Title 。 2. 输入“ The Transient Analysis of the structure ”,然后单击OK 。 第2步:定义单元类型 单元类型1为SHELL63,单元类型2为BEAM4 第3步:定义单元实常数 实常数1为壳单元的实常数1,输入厚度为0.02(只需输入第一个值,即等厚度壳)
实常数2为梁单元的实常数,输入AREA 为2e-4惯性矩IZZ=2e-8,IYY =2e-8宽度TKZ=0.01,高度TKY=0.02。 第5步:杨氏模量EX=2e112/m N 泊松比NUXY=0.3 密度DENS=7.8e33 /m Kg 第6步:建立有限元分析模型 1. 创建矩形,x1=0,x2=2,y1=0,y2=1 2. 将所有关键点沿Z 方向拷贝,输入DZ =-1 3. 连线。将关键点1,5;2,6;3,7;4,8分别连成直线。 4. 设置线的分割尺寸为0.1,首先给面划分网格;然后设置单元类型为2,实常数为2, 对线5到8划分网格。 第7步:瞬态动力分析 1. 选取菜单途径Main Menu>Solution>-Analysis Type-New Analysis ,弹出New Analysis 对话框。 2. 选择Transient ,然后单击OK ,在接下来的界面仍然单击OK 。 3. 选取菜单途径Main Menu>Solution>-Load Step Opts-Time/Frequenc> Damping , 弹出Damping Specifications 窗口。 4. 在Mass matrix multiplier 处输入5。单击OK 。 5. 选取菜单途径Main Menu > Solution > -Loads-Apply > -Structural- Displacement>On Nodes 。弹出拾取(Pick )窗口,在有限元模型上点取节点232、242、252和262,单击OK ,弹出Apply U,ROT on Nodes 对话框。 6. 在DOFS to be constrained 滚动框中,选种“All DOF ”(单击一次使其高亮度显示, 确保其它选项未被高亮度显示)。单击OK 。 7. 选取菜单途径Utility Menu>Select>Everything 。 8. 选取菜单途径Main Menu>Solution>-Load Step Opts-Output Ctrls>DB/Results File ,弹出Controls for Database and Results File Writing 窗口。 9. 在Item to be controlled 滚动窗中选择All items ,下面的File write frequency 中选择Every substep 。单击OK 。 10. 选取菜单途径Main Menu>Solution>-Load Step Opts-Time/Frequenc> Time – Time Step ,弹出Time – Time Step Options 窗口。 11. 在Time at end of load step 处输入1;在Time step size 处输入0.2;在Stepped or ramped b.c 处单击ramped ;单击Automatic time stepping 为on ;在Minimum time step size 处输入0.05;在Maximum time step size 处输入0.5。单击OK 。 12. 选取菜单途径Main Menu>Solution>-Loads-Apply>-Structure-Pressure>On Areas 。弹出Apply PRES on Areas 拾取窗口。 13. 单击Pick All ,弹出Apply PRES on Areas 对话框。 14. 在pressure value 处输入10000。单击OK 15. 选取菜单途径Main menu>Solution>Write LS File ,弹出Write Load Step File 对 话框。 16. 在Load step file number n 处输入1,单击OK 。 17. 选取菜单途径Main Menu>Solution>-Load Step Opts-Time/Frequenc> Time – Time Step ,弹出Time – Time Step Options 窗口。
网格和单元的基本概念 前记:首先说明,和一般的有限元或者计算力学的教材不一样,本人也不打算去抄袭别人的著作,下面的连载是一个阶段的学习或者专业感悟集大成,可以说深入浅出,也可以说浅薄之极——如果你认为浅薄,很好,说明我理解透了,也祝贺你理解透了!好了,废话少说,书归正传。 无论是CSD(计算结构力学)、CTD(计算热力学)还是CFD(计算流体动力学)——我们统一称之为工程物理数值计算技术。支撑这个体系的4大要素就是:材料本构、网格、边界和荷载(荷载问题可以理解为数学物理方程的初值问题),当然,如果把求解技术也看作一个要素,则也可以称之为5大要素。网格是一门复杂的边缘学科,是几何拓补学和力学的杂交问题,也是支撑数值计算的前提保证。本番连载不做任何网格理论的探讨(网格理论是纯粹的数学理论),仅限于尽量简单化的应用技术揭秘。 网格出现的思想源于离散化求解思想,离散化把连续求解域离散为若干有限的子区域,分别求解各个子区域的物理变量,各个子区域相邻连续与协调,从而达到整个变量场的协调与连续。离散网格仅仅是物理量的一个“表征符号”,网格是有形的,但被离散对象既可以是有形的(各类固体),也可以是无形的(热传导、气体),最关键的核心在于网格背后隐藏的数学物理列式,因此,简单点说,看得见的网格离散是形式,而看不见的物理量离散才是本质核心。 对计算结构力学问题,网格剖分主要包含几个内容:杆系单元剖分(梁、杆、索、弹簧等)、二维板壳剖分(曲面或者平面单元)、三维实体剖分(非结构化全六面体网格、四面体网格、金字塔网格、结构化六面体网格、混合网格等),计算热力学和计算流体动力学的网格绝大部分是三维问题。对于CAE工程师而言,任何复杂问题域最终均直接表现为网格的堆砌,工程师的任务等同于上帝造人的过程,网格是一个机体,承载着灵魂(材料本构、网格、边界和荷载),求解技术则是一个思维过程。 网格基本要素是由最基本的节点(node)、单元线(edge)、单元面(face)、单元体(body)构成,实质上,线、面、体只不过是为了让网格看起来更加直观,在分析求解过程中,线、面、体本质上并没有起多大的作用,数值离散的落脚点在节点(node)上,所有的物理变量均转化为节点变量实现连续和传递。在所有的CAE环境下,网格的基本要素均可以直接构成,但对于复杂问题而言,这是一个在操作上很难实现的事情,因此,基于几何要素的网格划分技术成为现代网格剖分应用的支点,和网格基本要素完全相同,对应的几何要素分别称之为点(point)、线(curve)、面(surface)和实体(solid)。 数值离散求解器是不能识别几何元素的,要对其添加“饲料”,工程师必须对几何元素进行“精加工”,因此,从这个意义上来说,网格剖分的本质就是把几何要素转换为若干离散的元素组,这些元素组堆砌成形态上近似逼近原有几何域的简单网格集合体。因此,这里说明了一个网格“加工”质量的基本判别标准——和几何元素的拟合逼近程度,理论上,越逼近几何元素的网格质量越好,当然,几何逼近只是一个基本的判别标准,网格质量判别有一系列复杂的标准,后文详细阐述。 本篇将专门解释几个基本概念:点网格;一维线网格;二维三角形面网格、二维四边形面网格;三维四面体网格(tetrahedra)、三维金字塔单元(pyramid)、五面体单元(prism)、三维六面体单元(hexahedra);结构化网格(structural grid)、非结构化网格(nonstructural grid)、混合网格(blend grid)。需要专门说明的是,网