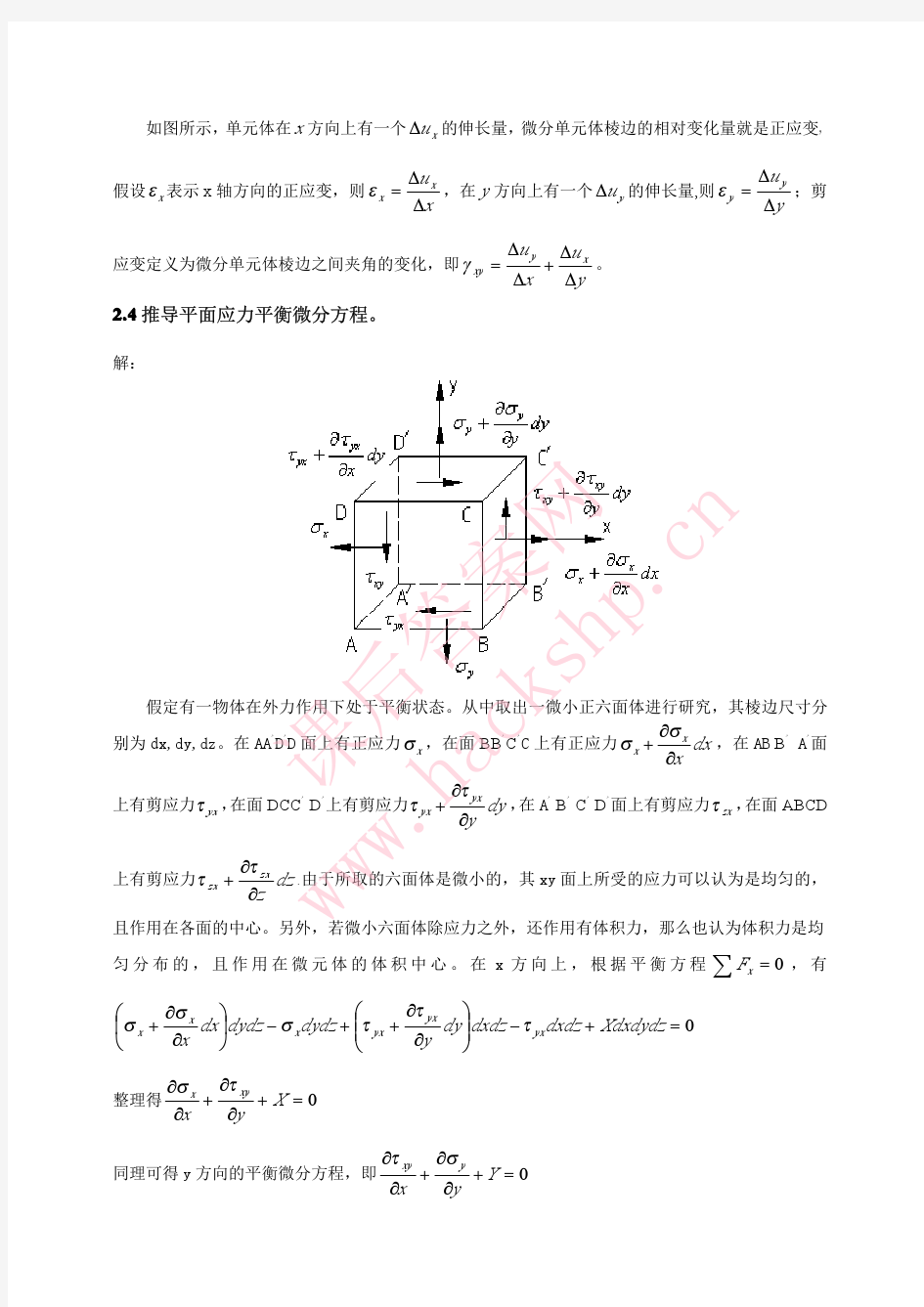
中间包结构有限元分析 摘要介绍了某钢厂中间包结构存在的问题,简要论述了中间包产生变形和裂纹的机理。利用数值模拟的方法对中间包结构强度和刚度进行有限元分析,通过计算所得的中间包温度场和应力场,显示中间包结构高应力区和强度的薄弱位置,提出改进方案。此外还改变中间包的耐火材料层的厚度和综合导热系数,分析这些因素对中间包温度场和应力场的影响,为中间包结构的优化提供理论支持。 关键词中间包结构强度刚度有限元分析 Finite Element Analysis of the Tundish Structure NI Sai-zhen, LI Fu-shuai, TAO Jin-ming (Metallurgical technology research institute of Beijing in CCTEC , Beijing 100028, China) Abstract In this paper, we introduced the problems of the tundish structure in a steel work at first, and briefly discussed the mechanism for the occurring of the tundish deformation and crack. Using the finite element method to analyze strength and stiffness for the tundish structure, according to the temperature and stress field, we can find hot point and high stress region. The effects of the fireproof material thickness and the total conductive coefficient on the temperature and stress field are also studied. Key words tundish structure strength stiffness finite element analysis 1 前言 一直以来对中间包的研究都侧重于中间包内流场的分析,有关中间包流场研究的文章很多[1-5],而对于中间包包体本身结构分析,研究者却很少关注,在这方面的文献也较少。中间包的强度以及结构的稳定性对于浇注的顺利进行以及保证铸坯质量方面同样起到很重要的作用。在热应力以及外载荷作用下中间包会产生变形,改变水口间的相对位置。如果变形过大的话,会影响到水口对中操作。包体的变形还可能使其产生裂纹,严重破坏包体结构,从而发生事故,不利于安全生产的进行。 某钢厂中间包为七机七流,铸机断面尺寸为150mm×150mm,流间距为1250mm,浇注周期约为36min,主要生产碳素结构钢Q235B,优质碳素结构钢45#,低合金结构钢 25MnSiV、Q345B等钢种,该中间包为T形结构,容量为40吨。中间包内衬耐火材料由外向内依次为工作层、永久层、保温层。该中间包存在以下问题: (1)现场反应变形比较严重,而相应结构的六机六流的中间包变形问题不明显; (2)新的中间包在开始浇铸时,靠四个耳轴支撑,中间底部与中间罐车横梁不接触,但随着浇铸时间的不断增加,中间就会慢慢凹陷,浇铸大约5-6小时后,中间 底部就会与横梁接触; (3)旧中间包或多或少都存在中间凹陷的永久变形,有些变形较大,在浇铸前中间
Harbin Institute of Technology 机械原理课程设计说明书 课程名称:机械原理 设计题目:产品包装生产线(方案1) 院系:机电学院 班级: 设计者: 学号: 指导教师: 设计时间:
一、绪论 机械原理课程设计是在我们学习了机械原理之后的实践项目,通过老师和书本的传授,我们了解了机构的结构,掌握了机构的简化方式与运动规律,理论知识需要与实践相结合,这便是课程设计的重要性。我们每个人都需要独立完成一个简单机构的设计,计算各机构的尺寸,同时还需要编写符合规范的设计说明书,正确绘制相关图纸。 通过这个项目,我们应学会如何收集与分析资料,如何正确阅读与书写说明书,如何利用现代化的设备辅助工作。这种真正动手动脑的设计有效的增强我们对该课程的理解与领会,同时培养了我们的创新能力,为以后机械设计课程打下了坚实的基础。 二、设计题目 产品包装生产线使用功能描述 图中所示,输送线1上为小包装产品,其尺寸为长?宽?高=600?200?200,小包装产品送至A处达到2包时,被送到下一个工位进行包装。原动机转速为1430rpm,每分钟向下一工位可以分别输送14,22,30件小包装产品。 产品包装生产线(方案一)功能简图 三、设计机械系统运动循环图 由设计题目可以看出,推动产品在输送线1上运动的是执行构件1,在A处把产品推到下一工位的是执行构件2,这两个执行构件的运动协调关系如图所示。 ?1?1 执行构件一 执行构件二 ?01?02 运动循环图
图中?1 是执行构件1的工作周期,?01 是执行构件2的工作周期,?02是执行构件2的动作周期。因此,执行构件1是做连续往复运动,执行构件2是间歇运动,执行构件2的工作周期?01 是执行构件1的工作周期T1的2倍。执行构件2的动作周期?02则只有执行构件1的工作周期T1的二分之一左右。 四、 设计机械系统运动功能系统图 根据分析,驱动执行构件1工作的执行机构应该具有的运动功能如图所示。运动功能单元把一个连续的单向传动转换为连续的往复运动,主动件每转动一周,从动件(执行构件1)往复运动一次,主动件转速分别为14,22,30rpm 14,22,30rpm 执行机构1的运动功能 由于电动机的转速为1430rpm ,为了在执行机构1的主动件上分别得到14、22、30rpm 的转速,则由电动机到执行机构1之间的总传动比i z 有3种,分别为 i z1= 141430 =102.14 i z2=221430=65.00 i z3=30 1430=47.67 总传动比由定传动比i c 和变传动比i v 两部分构成,即 i z1=i c i v1 i z2=i c i v2 i z3=i c i v3 3种总传动比中i z1最大,i z3最小。由于定传动比i c 是常数,因此,3种变传动比中i v1最大,i v3最小。为满足最大传动比不超过4,选择i v1 =4 。 定传动比为 i c = v1 z1i i =4102.14=25.54 变传动比为 i v2= c z2i i =54.2565=2.55 i v3= c z3i i =54 .2547.67=1.87 传动系统的有级变速功能单元如图所示。 i=4,2.55,1.87 有级变速运动功能单元
有限元法在机械工程中的应用 摘要:有限元法广泛应用于科学计算、设计、分析中,解决了许多复杂的问题。在机械设计中已成为一个重要的工具。在有限元基本原理的基础上,介绍了有限元的概念、分析了有限元的设计过程、介绍了有限元软件和其在机械设计中的应用。 关键词:有限元机械工程应用 前言 有限元方法诞生于20世纪中叶,随着计算机技术和计算方法的发展,已成为计算力学和计算工程领域里最为有效的计算方法。许多工程分析问题,如固体力学中的位移场和应力场分析、电磁学中的电磁场分析、振动特性分析、热学中的温度场分析、流体力学的流场分析等,都可归结为在给定边界条件下求解其控制方程的问题。有限元技术的出现为机械工程结构的设计、制造提供了强有力的工具,它可以解决许多以往手工计算根本无法解决的问题,为企业带来巨大的经济效益和社会效益。在现代机械工业中要设计生产出性能优越、可靠的机械产品,不应用计算及进行辅助设计分析是根本无法实现的,因此目前各生产设计部门都非常重视在设计制造过程中采用先进的计算机技术。 有限元法简介 有限元法最早是人们在研究固体力学的时候应运而生的,早在七八十年前,就有一些美国人在结构矩阵的分析方面有了一些研究发现,随后就有人研究出了钢架位移的方法,并将其推广应用到了弹性力学平面的分析当中,也就是把一些连续的整体划分为矩形和三角形,再将这些小的单元中的位移函数用近似的方法表达出来。后来,随着科学技术的不断发展,计算机的水平也有了很大的提高,有限元法也就相应的发展起来了,因为有限元法在产品的设计和研发的过程中起到了相当大的作用,所以有限元软件越来越受到相关专业人士的喜爱,而其在机械设计中的应用也是非常广泛的。 3.有限元法在机械工程中的应用 近年来,国内外许多学者对机械零部件的有限元分析进行了大量的研究,归纳起来主要是以下几个方面: (1)静力学分析。当作用在结构上的载荷不随时间变化或随时间的变化十分缓慢,应进行静力学分析。这是对机械结构受力后的应力、应变和变形的分析,是有限元法在机械工程中最基本、最常用的分析类型。 (2)动力学分析。机械零部件在工作时不仅受到静载荷作用,当外界有与其固有频率相近的激励时,还会引起共振,严重破坏结构从而引起失效。故零部件在结构设计时,对复杂结构,在满足静态刚度要求条件下,要检验动态刚度。
中南林业科技大学机械零件有限元分析 实验报告 专业:机械设计制造及其自动化 年级: 2013级 班级:机械一班 姓名:杨政 学号:20131461 I
一、实验目的 通过实验了解和掌握机械零件有限元分析的基本步骤;掌握在ANSYS 系统环境下,有限元模型的几何建模、单元属性的设置、有限元网格的划分、约束与载荷的施加、问题的求解、后处理及各种察看分析结果的方法。体会有限元分析方法的强大功能及其在机械设计领域中的作用。 二、实验内容 实验内容分为两个部分:一个是受内压作用的球体的有限元建模与分析,可从中学习如何处理轴对称问题的有限元求解;第二个是轴承座的实体建模、网格划分、加载、求解及后处理的综合练习,可以较全面地锻炼利用有限元分析软件对机械零件进行分析的能力。
实验一、受内压作用的球体的有限元建模与分析 对一承受均匀内压的空心球体进行线性静力学分析,球体承受的内压为 1.0×108Pa ,空 心球体的内径为 0.3m ,外径为 0.5m ,空心球体材料的属性:弹性模量 2.1×1011,泊松比 0.3。 承受内压:1.0×108 Pa 受均匀内压的球体计算分析模型(截面图) 1、进入 ANSYS →change the working directory into yours →input jobname: Sphere 2、选择单元类型 ANSYS Main Menu : Preprocessor →Element Type →Add/Edit/Delete →Add →select Solid Quad 4node 42 →OK (back to Element Types window)→ Options… →select K3: Axisymmetric →OK →Close (the Element Type window) 3、定义材料参数 ANSYS Main Menu : Preprocessor →Material Props →Material Models →Structural →Linear →Elastic →Isotropic →input EX:2.1e11, PRXY:0.3→ OK 4、生成几何模型生成特征点 ANSYS Main Menu: Preprocessor →Modeling →Create →Keypoints →In Active CS →依次输入四个点的坐标:input :1(0.3,0),2(0.5,0),3(0,0.5),4(0,0.3)→OK 生成球体截面 ANSYS 命令菜单栏: Work Plane>Change Active CS to>Global Spherical ANSYS Main Menu: Preprocessor →Modeling →Create →Lines →In ActiveCoord → 依次连接 1,2,3,4 点生成 4 条线→OK Preprocessor →Modeling →Create →Areas →Arbitrary →By Lines →依次拾取四条线→OK ANSYS 命令菜单栏: Work Plane>Change Active CS to>Global Cartesian 5、网格划分 ANSYS Main Menu : Preprocessor →Meshing →Mesh Tool →(Size Controls) lines: Set
2 受料仓与给料机的钢结构有限元分析 2.1建立有限元模型 如图2.1破碎站主视图和图2.2破碎机布置图,它的工作过程是:卸料卡车间歇把最大入料粒度为1500mm的煤块倒入受料仓,受料仓存储大粒度煤块。刮板给料机把受料仓的大粒度的煤块连续的刮给破碎平台的破碎机。破碎机把最大入料粒度为1500mm 的煤块破碎成最大排料粒度为300mm的煤块,煤块由底部的传送带传出。 图2.1 破碎站主视图 图2.2 破碎机布置图
破碎站钢结构的弹性模量E=200000MPa,泊松比μ=0.3,质量密度ρ=7.8×10-3kg/cm3。破碎站由支撑件H型钢和斜支撑(角钢)组成。在结构离散化时,由于角钢和其它部位铰接,铰接是具有相同的线位移,而其角位移不同。承受轴向力,不承受在其它方向的弯矩,相当于二力杆,所以H型钢用梁单元模拟,角钢用杆单元模拟。破碎站是由受料仓与给料机和破碎平台与控制室两部分组成,故计算时是分别对这两部分进行的。离散后,受料仓和给料机共686个单元,其中梁单元598 个,杆单元88个,节点总数为597个,有限元模型如图2.3和图2.4所示。 图2.3 受料仓与给料机有限元模型 图2.4 受料仓与给料机有限元模型俯视图
2.2载荷等效计算 2.2.1主要结构截面几何参数 破碎站主要结构采用H型钢梁,截面尺寸如图2.5所示,各截面横截面积A,截面 惯性矩I y ,I z 和极惯性矩I如下。 图2.5 截面尺寸 料仓及给料机支撑结构 料仓及给料机六根支撑立柱(H500×400×12×20) A= 215.2mm2,I y=101947×104mm4,I z=21340×104mm4,I=240×104mm4料仓B-B面横梁和给料机E-E、F-F面横梁(H400×300×12×20) A=16320mm2,I y=48026×104mm4,I z=9005×104mm4,I=181×104mm4料仓C-C面和D-D面横梁(H400×400×12×20) A=20320mm2,I y=62479×104mm4,I z=21339×104mm4,I=234×104mm4给料机两根纵梁(H550×400×12×20) A=22120mm2,I y=125678×104mm4,I z=21341×104mm4,I=243×104mm4给料机六根横梁(H400×400×12×20) A=20320mm2,I y=62479×104mm4,I z=21339×104mm4,I=234×104mm4其它横梁(H400×300×12×20) A=16320mm2,I y=48026×104mm4,I z=9005×104mm4,I=181×104mm4 斜支撑的横截面积 ∠125×12:A=2856mm2 ∠75× 6:A=864mm2
第一章绪论 重点:机械,机械系统的相关概念及学科中的位置。 难点:学习机械系统设计课程的重要性。 讲授提示与方法:回顾机械工程的发展历程,注重机械系统的整体性,提高学生对机械系统设计的认知程度。 1.1机械系统设计在机械工程科学中的地位及作用 一、机械工程科学 1.机械工程科学的定义: 机械工程科学是研究机械产品(或系统)的性能、设计和制造的基础理论与技术的科学。 2.机械工程科学的组成: P1图1.1 (1)机械学:机械设计过程(核心部分); (2)机械制造:机械制造过程(基础部分)。 3.机械学所包含的内容: P3图1.5 二、机械、机械系统、系统 1.机械:关于机械的定义,目前尚无严格的定论,一般可归纳为: (1)须由两个以上的零、部件组成; (2)这些零、部件的运动部件,应按设计要求作确定的运动; (3)将外来的能源转变为有用的机械功。 【举例】机械产品:汽车、拖拉机、机床、钟表…… 2.系统:是指具有特定功能的、相互间具有一定联系的许多要素构成的一个整 体。即由两个或两个以上的要素组成的具有一定结构和特定功能的整体都是 系统。 3.机械系统:由若干个零、部件及装置组成的,彼此间有机联系,并能完成特 定功能的系统,称之为机械系统。 4.系统应具有下述特性: (1)目的性:完成特定的功能 (2)相关性与整体性: 1)相关性:各构成要素之间是相互联系的 2)整体性:评价一个系统的好与坏要看该系统的整体功能 (3)环境的适应性:系统对外部环境变化和干扰有良好适应性 三、机械系统的组成: P4图1.6 1.动力系统:为系统提供能源(动力源) 2.执行系统:是系统的执行输出部分 3.传动系统:把运动和动力由动源传递给执行系统的中间环节 4.操纵、控制系统:使前三者协调动作和运行 5.支承系统:支承和联系各机件 6.润滑、冷却与密封系统:
支座的有限元分析 —基于UG8.0与ANSYS Workbench 摘要:采用三维软件UG8.0建立的支座模型,并将三维模型导入到ANSYS Workbench,在Workbench中,对其进行结构强度、刚度校核以及模态分析,得到其在工作载荷下的变形、应力和模态频率,并在结构尺寸上进行优化设计,使其在结构强度上得到改进与加强。关键词:支座;UG8.0;ANSYS Workbench;有限元 Abstract: using 3d software UG8.0 established contact ball bearing model, and the three dimensio nal model is imported to ANSYS Workbench, the Workbench, its structural strength, rigidity and modal analysis, get it under the working load of the deformation, stress and modal frequency, and carries on the optimization design on the structure size, in the structure strength is improved and st rengthened. Keywords:contact ball bearing;finite element ;UG8.0;ANANSYS Workbench 0引言 支座作为多向活动部件的连接装置,主要受来自复杂部件的随机变化载荷的作用力,由于载荷力复杂多变,且局部应力集中地现象存在,导致球形接触面产生不规则破坏。以前的设计方案基本是粗略的,对于结构尺寸不能做到很精确的设计,使用效果不怎么好。本文利用UG8.0三维设计软件对支座进行参数化建模,并运用UG与ANSYS Workbench软件间的接口,将模型导入到ANSYS Workbench中,对其进行结构强度、刚度校核以及模态分析。有限元是一种在工程分析工程中常用的解决复杂问题的近似的数值分析方法,ANSYS程序中加入了许多新的技术,非线性、子结构以及更多的单元类型被加入程序,从而使程序具有更强的通用性。同时,ANSYS还提供了强大和完整的联机说明系统详尽的联机帮助系统,使用户能够不断深入学习并完成一些深入的课题。并因在机械结构强度和刚度分析方面具有较高的计算精度而得到普遍应用。本文将分析在载荷的作用下,支座的变形,应力等,并显示强大的ANSYS的求解结果。
机械原理大作业二 课程名称:机械原理 设计题目:凸轮设计 院系:机电学院 班级: 1208103 完成者: xxxxxxx 学号: 11208103xx 指导教师:林琳 设计时间: 2014.5.2
工业大学 凸轮设计 一、设计题目 如图所示直动从动件盘形凸轮,其原始参数见表,据此设计该凸轮。 二、凸轮推杆升程、回程运动方程及其线图 1 、凸轮推杆升程运动方程(6 50π?≤ ≤) 升程采用正弦加速度运动规律,故将已知条件mm h 50=,6 50π =Φ带入正弦加速度运动规律的升程段方程式中得: ??? ?? ???? ??-=512sin 215650?ππ?S ;
?? ? ?????? ??-= 512cos 1601ππωv ; ?? ? ??= 512sin 1442 1?π ωa ; 2、凸轮推杆推程远休止角运动方程( π?π ≤≤6 5) mm h s 50==; 0==a v ; 3、凸轮推杆回程运动方程(9 14π ?π≤≤) 回程采用余弦加速度运动规律,故将已知条件mm h 50=,9 5'0π= Φ,6 s π = Φ带入余弦加速度运动规律的回程段方程式中得: ?? ? ???-+=)(59cos 125π?s ; ()π?ω--=59 sin 451v ; ()π?ω-=59 cos 81-a 21; 4、凸轮推杆回程近休止角运动方程(π?π 29 14≤≤) 0===a v s ; 5、凸轮推杆位移、速度、加速度线图 根据以上所列的运动方程,利用matlab 绘制出位移、速度、加速度线图。 ①位移线图 编程如下: %用t 代替转角 t=0:0.01:5*pi/6; s=50*((6*t)/(5*pi)-1/(2*pi)*sin(12*t/5)); hold on plot(t,s); t=5*pi/6:0.01:pi; s=50; hold on plot(t,s); t=pi:0.01:14*pi/9; s=25*(1+cos(9*(t-pi)/5));
考试科目:机械系统设计考试时间:110分钟试卷总分100分考试班级:机械05级 一、选择填空(本大题共10小题,每小题1分,总计10分) 1.机械工程学科由()和机械制造两部分组成。 A.机械原理 B.机械零件 C.机械学 D.机械加工 2.人们对机械系统进行功能原理设计时常采用的一种“抽象化”方法是()。 A.黑箱法 B.白箱法 C.类比法 D.头脑风暴法 3.机械系统结构总体设计的任务是()。 A.进行原理设计的构思 B.进行功能原理设计 C.将原理设计结构化 D.确定总体参数 4.在传动系统中,基本组的级比指数()。 A.小于1 B.等于1 C.大于1 D.任意数 5.双联滑移齿轮占用的最小轴向尺寸应不小于()。 A.3倍齿宽 B.4倍齿宽 C.5倍齿宽 D.6倍齿宽 6.执行系统是由执行末端件和与之相连的()组成。 A.运动机构 B.导向机构 C.定位机构 D.执行机构 7.预紧可以有效提高滚动轴承的()。 A.承载能力 B.工作转速 C.精度 D.刚度 8.我们可以用镶条来调整()的间隙。 A.三角形导轨 B.燕尾形导轨 C.车床主轴 D.铣床主轴 9.支承系统是机械系统中具有支承和()作用的子系统。 A.连接 B.导向 C.定位 D.夹紧 10.隔板的布置方向应与载荷的方向()。 A.平行 B.垂直 C.倾斜 D.任意 二、名词解释(本大题共5小题,每小题2分,总计10分) 1.机械系统2.功能原理设计3.级比4.执行系统5.自身刚度 三、简答题(本大题共6小题,每小题4分,总计24分) 1.机械系统设计有哪些基本原则? 2.什么是功能元?有那些种基本功能元? 3.扩大传动系统变速范围有哪些方法? 4.导轨有何功用?滑动导轨按其运动性质可分为哪几种类型? 5.什么是支承件的接触刚度?提高接触刚度有哪些有效措施? 6.常用的典型控制系统有哪几种类型? 四、填空题(本大题含2小题共8个空,每空2分,总计16分) 1.某台数控机床,主轴最高转速为4000r/min,最低转速为30r/min,计算转速为145r/min。拟选用交流调频主轴电动机,其最高转速和额定转速分别为4500r/min和1500r/min,则主轴的恒功率调速范围R np为(),电动机的恒功率调速范围r p为()r/min,如果有级变速机构的公比φu=R p,则有级变速机构的级数Z为()级。 2.某卧式滑动导轨,支承导轨长720mm,动导轨长360mm,计算开式导轨的判别依据
一.填空题(本大题共7小题,每空1分, 共15分) 1. 按照两连架杆可否作整周回转,平面连杆机构分为 、 和 。 2. 平面连杆机构的 角越大,机构的传力性能越好。 3. 运动副按接触形式的不同,分为 和 。 4.直齿圆柱齿轮正确啮合条件是两齿轮的 和 分别相等。 5. 凸轮从动件按其端部的形状可分为 从动件、 从动件和 从动件动件。 6. 机构具有确定运动的条件是: 。 7.通过将铰链四杆机构的转动副之一转化为移动副时,则可得到具有移动副的 机构、 机构、摇块机构和 机构。 二.选择题(本大题共15小题,每小题1分,共15分) 1. 要实现两相交轴之间的传动,可采用 传动。 A .直齿圆柱齿轮 B .斜齿圆柱齿轮 C .直齿锥齿轮 D .蜗杆蜗轮 2. 我国标准规定,对于标准直齿圆柱齿轮,其ha*= 。 A .1 B .0.25 C .0.2 D .0.8 3. 在机械传动中,若要得到大的传动比,则应采用 传动。 A. 圆锥齿轮 B. 圆柱齿轮 C. 蜗杆 D. 螺旋齿轮 4. 当四杆机构处于死点位置时,机构的压力角为 。 A .0° B .90° C .45° D .15° 5. 一般情况凸轮机构是由凸轮、从动件和机架三个基本构件组成的 机构。 A .转动副 B .移动副 C .高副 D .空间副 6. 齿轮的渐开线形状取决于它的 直径。 A .齿顶圆 B .分度圆 C .基圆 D .齿根圆 7. 对于滚子从动件盘形凸轮机构,滚子半径 理论轮廓曲线外凸部分的最小曲率半径。 A .必须小于 B .必须大于 C .可以等于 D .与构件尺寸无关 8. 渐开线直齿圆柱齿轮中,齿距p ,法向齿距n p ,基圆齿距b p 三者之间的关系为 。 A.p p p n b <= B.p p p n b << C.p p p n b >> D. p p p n b => 9. 轻工机械中常需从动件作单向间歇运动,下列机构中不能实现该要求的是 。 A.棘轮机构 B.凸轮机构 C.槽轮机构 D.摆动导杆机构 10. 生产工艺要求某机构将输入的匀速单向转动,转变为按正弦规律变化的移动输出,一种可供选择的机构是 。
《机械系统设计》 机械原理、机械设计和机械系统设计的 联系 院(系)机电工程学院 专业机械设计制造及其自动化 学生XXXXXX 学号XXXXXXXXX 班号XXXXXXX 2013年4月
浅谈机械原理、机械设计和机械系统设计的关系 XXXXX班XXXXXXXXX 摘要:机械学是对机械进行功能综合并定量描述及控制其性能的基础技术科学,机械系统从构思到实现要经历设计和制造两大不同性质的阶段,而这个 过程的实现需要诸如机械原理、机械设计和机械系统设计的学科作为基础,因此学习过程中处理好它们的关系式非常重要的。 关键词:机械原理、机械设计、机械系统设 一年的时间里,我学了机械原理、机械设计和机械系统设计这三门学科,作为机械设计制造及其自动化专业的专业基础课,这三门学科的重要性无可厚非,因此熟练掌握其相关知识是非常重要的,下面我就自己在学习过程中的经验与收获简单谈下对这三门学科的认识。 从这三门学科的课程安排顺序来看,就可明显看出三门学科是层层递进、逐步综合的关系,后面两门学科的学习都是要前面学科的知识作为基础。 机械原理,是研究机械运动学和动力学分析与设计的技术基础,它在基础课与专业课之间起着承上启下的作用,是进入专业课学习的基础学科。课程中对机械的组成原理、工作原理、运动分析乃至设计理论和方法都做了基本的介绍,对我们在认识实习、生产实习以及今后的工作中认识机械、了解机械和学会使用机械都有很大的帮助。例如,认识了解铣床工作台进给速度的调整、车削螺纹时不同螺距的形成都是通过齿轮传动并按照一定传动比计算挂轮实现的。又如,牛头刨床加工时进给量大小的调整可以通过连杆机构和棘轮机构实现等。这些有关机械的基本知识为机械设计、机械系统设计等此类专业课打下了基础。 机械设计,这门课程主要从研究一般机械传动装置的设计出发,研究机械中具有一般工作条件和常用参数范围内的通用机械零部的工作原理、结构特点、基本设计理论和设计计算方法。这门科目虽然是一门设计性的基础学科,但是已经综合了工程图学、工程力学、金属工艺学、机械工程材料与热处理、公差与技术测量和前面说到的机械原理课程,除此之外,本科目还综合了部分生产实习经验,因此机械设计已经是一门综合性、设计性很强的课程了,学习完这门课程,我们初步了解了常见的机械零件结构,已经需要具备设计整体机械组件的能力了。在期末的减速器课程设计中,我充分利用了自己所学的工程图学、高等数学、材料力学、机械原理、公差测量和计算机三维建模软件等知识,做到了融会贯通、综合运用。 而这学期学习的机械系统设计更是把课程学习提到了一个新的高度,它不但要用到机械原理、机械设计所学的相关知识,而且几乎已经涉及到了大学以来所有工科课程的内容,甚至已经超出了安排的既定课程知识范围。从书本中了解到,机械系统包括动力系统、传动系统、操作和控制系统、执行系统、支撑系统及润滑冷却和密封等子系统,而本课程即围绕这些子系统的设计展开讲述,而每个系统的设计过程中都需要用到各类不同的知识,其中诸如机械运动中的运动和力的变换与传递规律;机械零件与构件中的应力、应变和机械的失效;机械中的摩擦行为;对特定功能的机械结构分析等都与机械原理、机械设计课程的内容密不可分。除此之外,机械系统设计过程中的思维活动规律及设计手段;机械系统与人、环境的相互影响与适应等内容也是之前课本中没有涉及到的内容。机械系统设
有限元大作业——钢架结构分析 选题人: 日期:2016年6月2日
目录: 第一章:问题重述 (2) 一、题目内容: (3) 二、题目要求: (3) 第二章:有限元法手工求解 (3) 一、平面两单元离散化 (4) 二、单元分析 (4) 三、单元组装 (6) 四、边界条件引入及组装总体方程 (7) 五、求解整体刚度方程,计算节点2的位移和转角 (7) 六、求节点1、3支撑反力 (8) 七、设定数据,求解结果 (8) 八、绘制轴力图、弯矩图、剪力图 (9) 第三章、matlab编程求解: (11) 一、总体流程图绘制: (11) 二、输入数据: (12) 三、计算单元刚度矩阵: (12) 四、建立总体刚度矩阵: (13) 五、计算未约束点位移: (13) 六、计算支反力: (13) 七、输出数据: (13) 八、编程: (13) 第四章有限元求解 (13) 一、预处理 (13) 二、模型建立: (15) 二、分析计算 (17) 三、求解结果 (18) 四、绘制图像 (19) 第五章结果比较 (22) 第六章心得体会 (22) 第七章附录 (23) 一、matlab程序 (24) 第一章:问题重述
一、题目内容: 图示平面钢架结构 图题目内容 二、题目要求: (1)采用平面梁单元进行有限元法手工求解,要求写出完整的求解步骤,包括: a)离散化:单元编号、节点编号; b)单元分析:单元刚度矩阵,单元节点等效载荷向量; c)单元组长:总体刚度矩阵,总体位移向量,总体节点等效载荷; d)边界条件的引入及总体刚度方程的求解; e)B点的位移,A、C处支撑反力,并绘制该结构的弯矩图、剪力图和轴力图。 (2)编制通用平面钢架分析有限元Matlab程序,并计算盖提,与手工结果进行比较; (3)利用Ansys求解,表格列出B点的位移,A、C处支反力,绘制弯矩图、剪力图和轴力图,并与手算和Matlab程序计算结果比较。 (4)攥写报告,利用A4纸打印; (5)心得体会,并简要说明各成员主要负责完成的工作。 第二章:有限元法手工求解
H a r b i n I n s t i t u t e o f T e c h n o l o g y 机械原理大作业一 课程名称:机械原理 设计题目:连杆机构运动分析 院系:机电学院 班级:1208105 分析者:殷琪 学号: 指导教师:丁刚 设计时间: 哈尔滨工业大学 设计说明书 1 、题目 如图所示机构,一只机构各构件的尺寸为AB=100mm,BC=,CE=,BE=,CD=,AD=,AF=7AB,DF=,∠BCE=139?。构件1的角速度为ω1=10rad/s,试求构件2上点E的轨迹及构件5的角位移、角速度和角加速度,并对计算结果进行分析。 2、机构结构分析
该机构由6个构件组成,4和5之间通过移动副连接,其他各构件之间通过转动副连接,主动件为杆1,杆2、3、4、5为从动件,2和3组成Ⅱ级RRR 基本杆组,4和5组成Ⅱ级RPR 基本杆组。 如图建立坐标系 3、各基本杆组的运动分析数学模型 1) 位置分析 2) 速度和加速度分析 将上式对时间t 求导,可得速度方程: 将上式对时间t 求导,可得加速度方程: RRR Ⅱ级杆组的运动分析 如下图所示 当已知RRR 杆组中两杆长L BC 、L CD 和两外副B 、D 的位置和运动时,求内副C 的位置、两杆的角位置、角运动以及E 点的运动。 1) 位置方程 由移项消去j ?后可求得i ?: 式中, 可求得j ?: E 点坐标方程: 其中 2) 速度方程 两杆角速度方程为 式中, 点E 速度方程为 3) 加速度方程 两杆角加速度为 式中, 点E 加速度方程为 RPR Ⅱ级杆组的运动分析 (1) 位移方程 (2)速度方程 其中 (3)加速度方程 4、 计算编程 利用MATLAB 软件进行编程,程序如下: % 点B 和AB 杆运动状态分析 >>r=pi/180; w 1=10; e 1=0; l 1=100; Xa=0; Ya=0;
“机械结构有限元分析”课程结业要求 1.选题 每位同学可根据本人的情况,选择下面三种方案之一(只选一种): 1)提交课程读书笔记。 2)完成老师布置的大作业。 3)撰写论文 2.成绩评定 1)完成“读书笔记”的,成绩为:及格; 2)完成“大作业”的,成绩为:及格~良; 3)完成“论文”的,成绩为:良~优; 4)不交任何书面材料的,成绩为:不及格 3.要求 1)读书笔记必须是手写,字数不低于4000字,要求字迹工整,不得抄袭同学的笔记。内容不限,可以是对课程的总结、心得,也可以是对某一章的叙述。2)论文的题目不限,鼓励同学们自已发现问题,自已命题。论文的问容一般为:题目,作者,所在班级,摘要(不少于100字),关键词(3-5条),前言,正文内容,结论,参考文献。正文字数在3000-4000之间,论文要求打印。论文格式可以参照学术期刊上发表的论文。 3)大作业手算部分要求手写,Ansys计算部分要求打印,最后合订。 4)上交的材料(读书笔记,大作业,论文)都应装订,封面见附页 5)打印部分均为A4页面。 5)最后上交的日期为:2013年4月25日,下午4:00,地点7教213。
大作业题目 题目一. 设一平面桁架结构,如图所示1所 示,由7根钢管铰接而成,每根钢管长度均 为1000mm ,桁架两端为固定支承,每根钢管 的横载面均为外径160mm ,内径120mm 。已 知钢管材料的弹性模量E=2.1×105N/mm 2, 许用应力[σ]=190MPa, 载荷F1=30000N, F2=20000N, F3=10000N,试校核强度。 (本题要求用手算或编程计算) 题目二. 有一支座,如下图所示所示(铸造),底板上有四个直径为14mm 的圆孔,其圆面受到全约束,已知材料的弹性模量E=1.7×105N/mm 2,泊松比μ=0.3,许用应力[σ]=150MPa ,右端φ60的孔端面(A-B )受到水平向左的分布力作用,分布力的合力大小为20000N ,试分析支座内部的应力分布,并校核强度。(本题目用Ansys 建模求解,要求写出每一步的操作及结果) 图 1
哈工大机械原理课程—产品包装线方案9
H a r b i n I n s t i t u t e o f T e c h n o l o g y 课程设计说明书(论文) 课程名称:机械原理课程设计 设计题目:产品包装生产线(方案9) 院系:机电工程学院 班级: 设计者: 学号: 指导教师:陈明 设计时间:2013.07.01-2013.07.05
哈尔滨工业大学 目录 一.题目要求 (3) 二.题目解答 1.工艺方法分析 (3) 2.运动功能分析及图示 (4) 3.系统运动方案的拟定 (8) 4.系统运动方案设计 (13) 5.运动方案执行构件的运动时序分析 (19) 6.运动循环图 (21)
产品包装生产线(方案9) 1.题目要求 如图1所示,输送线1上为小包装产品,其尺寸为长*宽*高=500*200*200,采取步进式输送方式,将第一包和第二包产品送至托盘A上(托盘A上平面与输送线1的上平面同高),每送一包产品至托盘A上,托盘A下降200mm。当第三包产品送到托盘A上后,托盘A上升405mm、顺时针旋转90°,把产品推入输送线2。然后,托盘A逆时针回转90°、下降5mm恢复至原始位置。原动机转速为1430rpm,产品输送量分三档可调,每分钟向输送线2分别输送6、12、18件小包装产品。 图1功能简图
2.题目解答 (1)工艺方法分析 由题目和功能简图可以看出,推动产品在输送线1上运动的是执行机构1,在A处使产品上升、转位的是执行构件2,在A处把产品推到下一个工位的是执行构件3,三个执行构件的运动协调关系如图所示。 下图中T1为执行构件1的工作周期,T2是执行构件2的工作周期,T3是执行构件3的工作周期,T3’是执行构件3的动作周期。由图2可以看出,执行构件1是作连续往复移动的,而执行构件2则有一个间歇往复运动和一个间歇转动,执行构件3作一个间歇往复运动。三个执行构件的工作周期关系为:3T1= T2= T3。执行构件3的动作周期为其工作周期的1/20。 图2 运动循环图 (2)运动功能分析及运动功能系统图 根据前面的分析可知,驱动执行构件1工作的执行机构应该具有运动功能如
机械结构有限元分析 有限元分析软件ANSYS在机械设计中的应用 摘要:在机械设计中运用ANSYS软件进行有限元分析是今后机械设计发展的必然趋势,将有限元方法引入到机械设计课程教学中,让学生参与如何用有限元法来求解一些典型零件的应力,并将有限元结果与教材上的理论结果进行对照。这种新的教学方法可以大大提高学生的学习兴趣,增强学生对专业知识的理解和掌握,同时还可以培养学生的动手能力。在机械设计课程教学中具有很强的实用价值。 关键词:机械设计有限元 Ansys 前言:机械设计课程是一门专业基础课,其中很多教学内容都涉及到如何求取零件的应力问题,比如齿轮、v带、螺栓等零件。在传统的教学过程中,都是根据零件的具体受力情况按材料力学中相应的计算公式来求解。比如,在求解齿轮的接触应力时,是把齿轮啮合转化为两圆柱体的接触,再用公式求解。这些公式本身就比较复杂,还要引入各种修正参数,因此我们在学习这些内容时普遍反映公式难记,学习起来枯燥乏味,而且很吃力。 近年来有限元法在结构分析中应用越来越广泛,因此如果能将这种方法运用到机械设计课程中,求解一些典型零件的应力应变,并将分析结果和教材上的理论结果进行对比,那么无论是对于提高学生学习的热情和积极性,增强对重点、难点知识的理解程度,还是加强学生的计算机水平都是一件非常有益的事情。 由于直齿圆柱齿轮的接触强度计算是机械设计课程中的一个重要内容,齿轮强度的计算也是课程中工作量最繁琐的部分。下面就以渐开线直齿圆柱齿轮的齿根弯曲疲劳强度的计算为例,探讨在机械设计课程中用ANSYS软件进行计算机辅助教学的步骤和方法,简述如何将有限元方法应用到这门课程的教学中。 1.传统的直齿圆柱齿轮齿根弯曲疲劳强度的计算 传统方法把轮齿看作宽度为b的矩形截面的悬臂梁。因此齿根处为危险剖面,它可用30。切线法确定。如图l所示。 作与轮齿对称中心线成30。角并与齿根过渡曲线相切的切线,通过两切点作平行与齿轮轴线 的剖面,即齿根危险剖面。理论上载荷应由同时啮合的多对齿分担,但为简化计算,通常假设全部载荷作用于齿顶来进行分析,另用重合度系数E对齿根弯曲应力予以修正。 由材料力学弯曲应力计算方法求得齿根最大弯曲应力为:
1 有限元分析软件的开发 1.1 程序功能 该程序为平面刚架静力分析程序,能针对平面刚架间问题进行有限元计算,计算杆端位移及杆端力大小。程序从磁盘文件中读取单元编号、节点编号及坐标、材料属性、荷载、边界条件等信息;将杆端位移,杆端力等计算结果以磁盘文件的形式输出,采用等带宽二维数组存储整体刚度矩阵并使用高斯消去法进行求解。
1.2 程序结构及流程
1.3 程序的输入与输出 详细介绍输入输出数据的格式。如:数据文件分几个部分,各有几行,分别包含哪些容及其类型、先后次序,等等。 输入,共有九行。第一行:7,13,5,1,2,2。分别为,7个结点,13个自由度,5个单元,1个类型,2个结点荷载,2个非结点荷载。 第二行:1,2,3,0.0,0.0,0,0,,6.0,0.0。分别为:一号结点的位移序号,x方向为1,y方向为2,转角为3,坐标为(0.0,0.0),因为二号结点固结在地面,所以二号结点的位移序号,x方向为0,y方向为0,转角为0,坐标为(6.0,0.0)。 第三行:4,5,6,0.0,6.0,4,5,7,0.0,6.0。分别为:三号结点的位移序号,x方向为4,y方向为5,转角为6,坐标为(0.0,6.0), 四号结点位移序号x方向和y相同,转角为7,坐标为(,0.0,6.0)。 第四行:8,9,10,6.0,6.0,0,0,11,0.0,12.0.五号结点位移序号,x方向为8,y方向为9,转角为10,坐标为(6.0,6.0)。因为六号结点铰接在地面,所以六号结点的位移序号,x方向和y方向为0,转角为11,坐标为(0.0,12.0)。 第五行:12,0,13,6.0,12.0. 因为七号结点与地面用滑动支座固定,所以七号结点的位移序号,x方向为12,y方向为0,转角为13,坐标(6.0,12.0). 第六行:1,2,1,1,3,1,4,5,1,3,6,1,5,7,1,分别为,1号和2号结点组成的单元为1号类型。1号和3号结点组成的单元为1号类型,4号和5号结点组成的为1号类型,3号和6号结点组成的单元为1号类型,5号和7号结点组成的单元为1号类型。 第七行:分别为,弹性模量为E=2×108 kN/m2,截面面积A=0.16m2,惯性矩I=0.002m4。