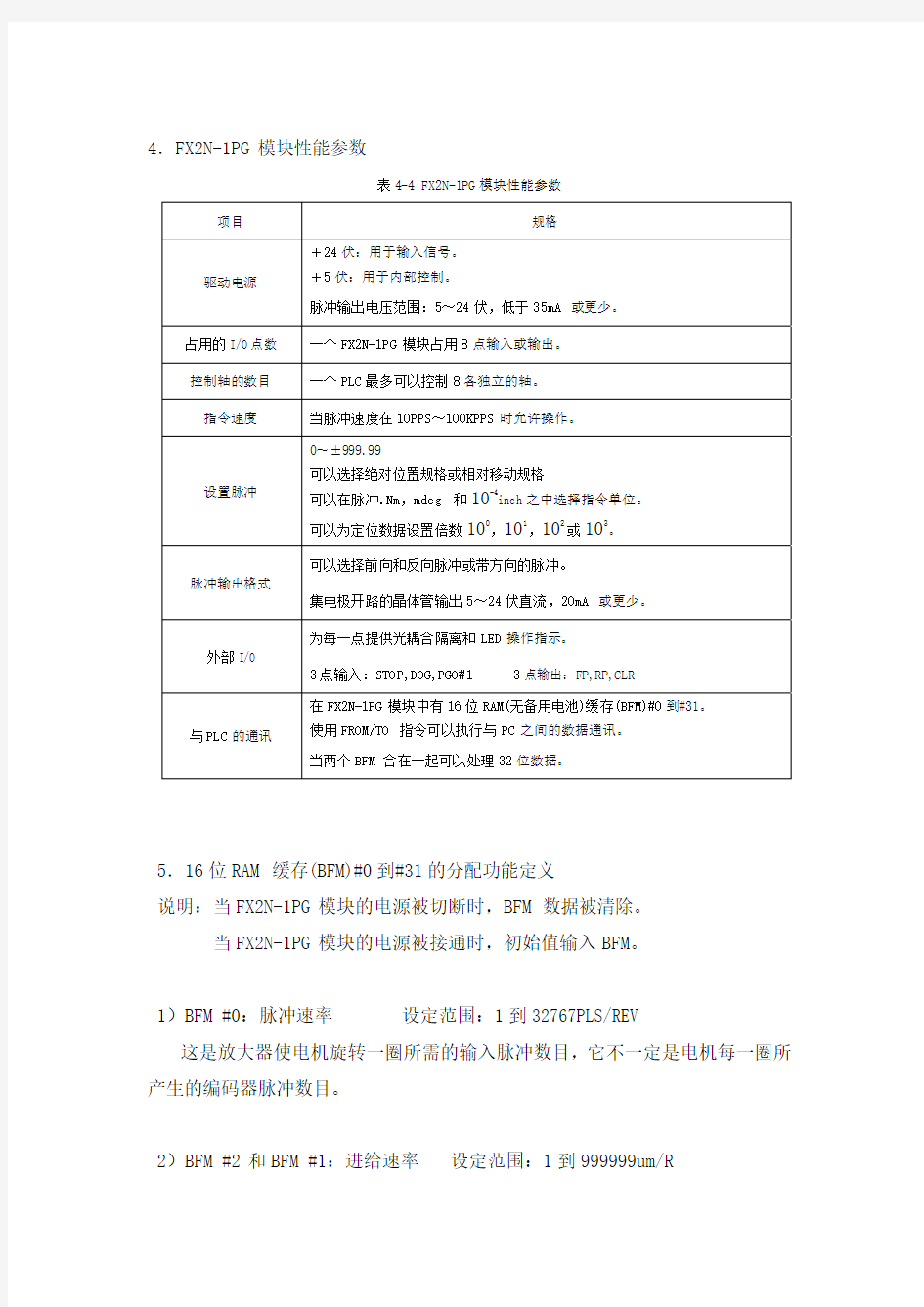
4.FX2N-1PG模块性能参数
表4-4 FX2N-1PG模块性能参数 项目 规格
驱动电源 +24伏:用于输入信号。
+5伏:用于内部控制。
脉冲输出电压范围:5~24伏,低于35mA或更少。
占用的I/O点数 一个FX2N-1PG模块占用8点输入或输出。 控制轴的数目 一个PLC最多可以控制8各独立的轴。
指令速度 当脉冲速度在10PPS~100KPPS时允许操作。
设置脉冲 0~±999.99
可以选择绝对位置规格或相对移动规格
可以在脉冲.Nm,mdeg和10-4inch之中选择指令单位。 可以为定位数据设置倍数100,101,102或103。
脉冲输出格式
可以选择前向和反向脉冲或带方向的脉冲。
集电极开路的晶体管输出5~24伏直流,20mA或更少。
外部I/O
为每一点提供光耦合隔离和LED操作指示。
3点输入:STOP,DOG,PGO#1 3点输出:FP,RP,CLR
与PLC的通讯 在FX2N-1PG模块中有16位RAM(无备用电池)缓存(BFM)#0到#31。 使用FROM/TO指令可以执行与PC之间的数据通讯。
当两个BFM合在一起可以处理32位数据。
5.16位RAM缓存(BFM)#0到#31的分配功能定义
说明:当FX2N-1PG模块的电源被切断时,BFM数据被清除。
当FX2N-1PG模块的电源被接通时,初始值输入BFM。
1)BFM #0:脉冲速率 设定范围:1到32767PLS/REV
这是放大器使电机旋转一圈所需的输入脉冲数目,它不一定是电机每一圈所产生的编码器脉冲数目。
2)BFM #2和BFM #1:进给速率 设定范围:1到999999um/R
这是电机旋转一圈的机器移动量。
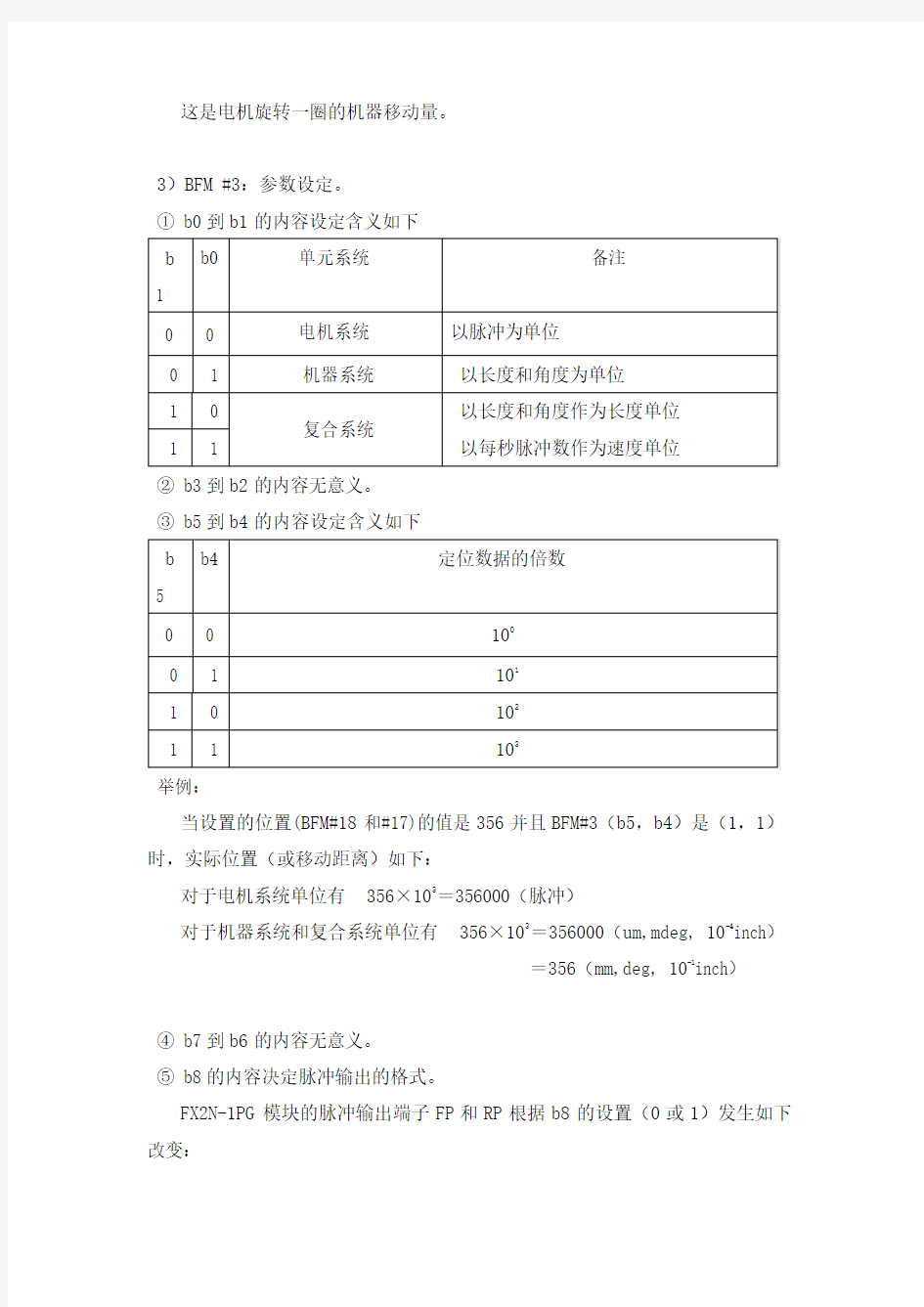
3)BFM #3:参数设定。
① b0到b1的内容设定含义如下
b
1
b0 单元系统 备注 0 0 电机系统 以脉冲为单位
0 1 机器系统 以长度和角度为单位
1 0
复合系统 以长度和角度作为长度单位 以每秒脉冲数作为速度单位
1 1
② b3到b2的内容无意义。
③ b5到b4的内容设定含义如下
b
5
b4 定位数据的倍数
0 0 100
0 1 101
1 0 102
1 1 103
举例:
当设置的位置(BFM#18和#17)的值是356并且BFM#3(b5,b4)是(1,1)时,实际位置(或移动距离)如下:
对于电机系统单位有 356×103=356000(脉冲)
对于机器系统和复合系统单位有 356×103=356000(um,mdeg, 10-4inch)
=356(mm,deg, 10-1inch)
④ b7到b6的内容无意义。
⑤ b8的内容决定脉冲输出的格式。
FX2N-1PG模块的脉冲输出端子FP和RP根据b8的设置(0或1)发生如下改变:
当b8=0时,前向脉冲(FP)和反向脉冲(RP)波形如下:
⑥ b9的内容决定旋转方向
当b9=0时,每有一个前向脉冲(FP),当前位置(CP)值就增加一次。
当b9=1时,每有一个前向脉冲(FP),当前位置(CP)值就减少一次。
该位用于初始设置,在每个实际操作中,不需要改变旋转方向。
⑦ b10的内容决定原点返回方向,b11的内容无意义。
当b10=0时,在返回原点的过程中当前位置(CP)值减少。
当b10=1时,在返回原点的过程中当前位置(CP)值增加。
⑧ b12的内容决定DOG输入的极性,b13的内容决定计数开始定时。
⑨ b14的内容决定STOP输入的极性。
当b14=0时,在输入合上时,停止操作。
当b14=1时,在输入断开时,停止操作。
该极性更改仅对STOP有效。
⑩ b15的内容决定STOP输入的模式。
当b15=0时,在操作过程中,如果给出停止命令(由FX2N-1PG模块或PLC),该操作中断;随后当给出重启命令时,剩余距离继续被执行(走完剩余距离)。 当b15=1时,剩余距离的操作将不被执行,而是执行下一个定位操作。
注意:BFM #3根据每位的0、1状态,向BFM #3写入16位H□□□□,应将b2,b3, b6, b7和 b11设置为0。
速度数据和定位数据的设置参考如下:
4)BFM #5和#4:最大速度V max
电机系统和复合系统:10到100000HZ
机器系统:1到15300
5)BFM #6:基速V bia
电机系统和复合系统:0到100000HZ
机器系统:0到15300
这是启动时的基速。当FX2N-1PG模块和步进电机一起使用时,在考虑共振区和步进电机的自启动频率的情况下设置一个值。
6)BFM #8和#7:JOG速度V JOG
电机系统和复合系统:10到100000HZ
机器系统:0到15300
这是点进/点退(JOG+/JOG-)的速度。应在基速V bia和最大速度V max之间设置一个值。
7)BFM #10和#9:原点返回速度(高速)V RT
电机系统和复合系统:10到100000HZ
机器系统:1到15300
这是返回机器原位的速度(高速)。应在基速V bia和最大速度V max之间设置一个值。
8)BFM #11:原点返回(爬行)速度V CR
电机系统和复合系统:10到100000HZ
机器系统:1到15300
这是返回机器原位的近点标志(DOG)发出后的速度(非常慢)。在机器原点前停止瞬间的速度。应设置的尽可能慢些,从而获得更精确的原位。
9)BFM #12:用于原点返回的0点标志数目N
设置范围:0到32767PLS
电机系统:0到±999999PLS
机器系统和复合系统:0到±999999
这是机器返回的原点位置。
11)BFM #15:加速/减速时间 Ta
设置范围:50到5000ms
这是从基速到最大速度之间的时间。
12)BFM #18和#17:设置位置(1)
电机系统:0到±999999PLS
机器系统和复合系统:0到±999999
这是目标位置或操作的移动距离。
13)BFM #20和#19:运行速度(1)
电机系统和复合系统:10到10000HZ
机器系统:1到153000
这是在基速和最大速度之间范围内的实际运行速度。
14)BFM #22和#21:设置位置(2)
电机系统:0到±999999PLS
机器系统和复合系统:0到±999999
这是在双速定位操作下给第二个速度的设置位置。
15)BFM #24和#23:运行速度(2)
电机系统和复合系统:10到10000HZ
机器系统:1到153000
这是在基速和最大速度之间范围内的双速定位操作的第二个运行速度。
电机系统:-2147483648到+2147483647HZ
机器系统和复合系统: -2147483648到+2147483647
当前位置的数据自动在此写入。
如果要将当前值送到PLC用于监控时,应用32位FROM指令读取。
17)操作命令主要根据BFM #25(b0到b11,b12)来决定。
b0: 当b0=1时,误差复位。
b1: 当b1=0→1时,停止。
b2: 当b2=1时,前向脉冲停止。
b3: 当b3=1时,反向脉冲停止。
b4: 当b4=1时,点进(JOG+)操作。若b4持续为1的时间少于300ms时,会产生一个前向脉冲;若b4持续为1的时间大于或等于300ms时,会产生连续的前向脉冲。
b5: 当b5=1时,点退(JOG-)操作。若b4持续为1的时间少于300ms时,会产生一个反向脉冲;若b4持续为1的时间大于或等于300ms时,会产生连续的反向脉冲。
b6: 当b6=0→1时,原位返回开始。
b7: 当b7=0时,绝对位置。当b7=1时,相对位置。
b8: 当b8=0→1时,单速定位操作开始。
b9: 当b9=0→1时,中断单速定位操作开始。
b10: 当b10=0→1时,双速定位操作开始。
b11: 当b11=0→1时,外部命令定位操作开始。
b12: 当b12=1时,变速操作。
在FX2N-1PG模块中,当每一个BFM被读或写时,16位数据应以16位为单位被读或写;32位数据应以32位为单位被读或写。
注:关于FX2N-1PG模块与三菱MELSERVO-J3系列伺服系统的连接使用,请参
见《FX系列特殊功能模块》用户手册和《三菱通用伺服MELSERVO-J3系列》使用手册。
KQ-100E型电力载波通信模块(载波调制解调模块) 本模块以低压电力线作为信号(数据)传输的媒体。也适用于平行线或双绞线等传输媒体。 模块按电力部“低压电力用户集中抄表系统技术条件”标准进行设计和制造,适用于供电局集中抄表系统﹑铁路信息监测系统﹑石化﹑税控﹑海轮﹑航标灯﹑路灯﹑智能监控﹑家庭智能化等系统;也适合于其它远程数据传输系统和远距离模拟数据遥测,遥控应用领域。 信号或数据用50KHz-350KHz之间的载波频率进行调频,此高频信号通过低压电力线向远方传送,载波中心频率为127KHZ(KQ-100E) ;212KHZ(KQ-100C)等多种频点的产品由生产厂预设,也可按用户要求选择。 模块外形图如下: AC端为信号输入端,直接接220V低压电力线上。 为外接直流电源,可选用+5V~+15V,电压调高,发送功率大,信号传送距离V AA 远。最好不要超过18V使用。 +5V为模块内部电路工作电源,在4.5-5.5V范围内能正常工作,模块内有防过压和防瞬变抑制电路,以防过电压和雷电对模块的损坏。 RXD是数据接收端,HCMOS信号。 TXD是数据发送端,欲发向远端的信号或数据应从此端接入。 R/T为控制端,高电平时为R(接收),低电平时为发送(T) 模块技术指标如下: 载波中心频率:127KHZ;212KHZ 带宽: 8.77KHz 接收灵敏度 <1mV 低电平最大值 高电平最小值 TX,R/T(输入) 0.8V 3.8V RX(输出) 0.8V 3.8V 接口输入多数同HCMOS电平接口标准。
绝缘电阻: >20MΩ 耐压: >2KV(AC,60秒,1mA) : +15V:330mA(发送时) 功耗V AA 传输速率: 4800bps,可下调 使用环境: 温度: -10℃~+50℃ ;-40℃~70℃(工业级) 湿度: <85% <95% (工业级) 应用参考: 1、数据采集与远传(抄表器,仓库温湿度检测,井下数据检测等): 如下图所示连接,集中器可接A、B、C三相及零线、集中器内相线间接0.1μf/1KV电容器形成高频桥路,如图b。 +5 V AA(5-15V) (a)抄收终端 A B C (b)数据集中和远传 (C)多采集器与集中器的连接方法 2、遥控
非标设备通用技术要求规范本行的一定得看看 为了在今后设备前期管理过程中,加强非标设备的质量控制工作,改善设备初期状态,确保设备在生产服役过程中有良好的开动率,特制定本规范。希望参与前期管理的技术人员参照执行,使技术要求更全面、准确、严密。 一、技术要求 (一)、操作面板 1、操作面板的位置要合适,便于操作及操作者观察设备运行情况。 2、指示灯要求设置齐全,不同功能的指示灯,使用不同颜色。具体要求为:电源指示灯——绿色,状态灯——黄色,故障灯——红色。 3、按钮开关设置齐全,能够独立运行的部件,都应有相应的手动操作按钮。 4、急停按钮采用红色蘑菇头自锁按钮,连接常闭点。 5、操作面板上的指示灯、按钮开关等,要有明确的名称指示标牌,并要可靠固定。标牌采用金属刻字标牌。 6、设备自动运行时,在任何位置,按停止键设备停止后,都能用手动操作恢复到初始状态,并继续自动运行。 7、设备急停后,必须进行复位,才能进行手动操作;恢复到原位后,工作设备才可以再次自动运行。 8、操作面板打开时,应有防止操作面板打开过位、脱落的保护装置;操作面板的电线引线要可靠固定,并在打开过程中移动部位留有一定长度的余量。
9、操作台箱体结构、元件布置结构应便于维修及部件更换。 10、可移动式操作台必须单独内置或外置软地线。 11、对灰尘、水气、油污比较大的环境,操作台箱体要有良好的密封设施。 (二)、控制柜 1、控制柜要有标牌,标明设备型号、电气容量等技术参数。 2、控制柜应有电源总开关,电源总开关操作手柄应设置在控制柜两端外侧。 3、控制柜应装射照明灯。 4、控制柜应有插座,2线,3线220V、5A以上的电源插座各一组。 5、控制柜的各个元件应有永久性标牌,并应与图纸的名称一致。标牌位置不能贴在元件上,应就近合理布置。 6、控制柜元件布置位置应预留10%以上位置。 7、接线端子板的同一端子位置,最多接3根电线。 8、接线端子板要预留10%以上备用端子。 9、导线接点要压接专用接线端子,不得直接和端子板或元件连接。 10、备用线应预留10%以上,并标有备用线号。 11、控制柜元件固定方式要合理,便于拆装;不允许采用螺丝、螺母穿孔固定方式。 12、电气配线应有标号,并与图纸一致。标号要求为打印方式,长期使用不脱色,并能防水、防油。另外,同一电线两端的标号必须相同,接到同一端子上的电线的标号相同。
摘要 在模拟通信系统中,由模拟信源产生的携带有信息的消息经过传感器转换成电信号。模拟基带信号在经过调制将低通频谱搬移到载波频率上适应信道,最终解调还原成电信号。本文应用了频率调制法产生调制解调信号。本论文中主要通过对SIMULINK工具箱的学习和使用,利用其丰富的模板以及本科对通信原理知识的掌握,完成了FM信号的调制与解调,以及用SIMULINK进行设计和仿真。首先利用简单的正玄波信号发生器作为信源,对模拟信号进行FM调制解调原理的仿真。 关键词:调制解调;FM ;MATLAB;SIMULINK仿真
Abstract In the simulation of communication systems, generated by the analog source carrying a message through the sensor into electrical signals. Analog baseband signal after the modul- -ation of the low pass spectrum to carrier frequency to adapt to the channel, the final reducti- -on into electrical signal demodulation. This paper applied the frequency modulation method to generate the signal modulation and demodulation. Mainly through the study and use of SIMULINK toolbox in this thesis, with its rich template and undergraduate course on comm--unication theory knowledge,the modulation and demodulation of FM signal, as well as the design and simulation with SIMULINK. Firstly, sine wave signal generator is simple as the source, simulation FM modulation anddemodulation principle of analogue signals. Then, using the song as the source. Keywords: modulation and demodulation;FM; MATLAB; SIMULINK simulation
1.泵与风机的基本性能参数。 2. 离心式叶轮按出口安装角β2y的大小可分为三种型式。 3、泵与风机的损失主要。 4、离心式泵结构的主要部件。 5、轴流式通风机的主要部件。 1.泵与风机的性能曲线主要包括()。 A扬程与流量、B轴功率与流量、C效率与流量。 2.泵与风机管路系统能头由()项组成。 A流体位能的增加值、B流体压能的增加值、C各项损失的总和。 3、通风机性能试验需要测量的数据()。 A压强、B流量、C功率、D、转速、E 温度。 4、火力发电厂常用的叶片泵() A给水泵、B循环水泵、C 凝结水泵、D 灰渣泵。 5、泵与风机非变速调节的方式。() A节流调节、B分流调节、C前导叶调节、E 动叶调节。 1.简述离心式泵与风机的工作原理 2. 影响泵与风机运行工况点变化的因素 3、泵与风机串并联的目的 4、比转速有哪些用途 1.有一单吸单级小型卧式离心泵,流量q v=68m3/h,NPSH c=2m,从封闭容器中抽送温度400C的清水,容器中液面压强为,吸入管路总的流动损失Σh w=,试求该泵的允许几何安装高度是多少(水在400C时的密度为992kg/m3。对应的饱和蒸汽压强7374Pa。)
2.有一输送冷水的离心泵,当转速为1450r/min时,流量q v=s,扬程H=70m,此时所需的轴功率P sh=1100KW,容积效率ηv=,机械效率ηm=,求流动效率为多少(已知水的密度ρ=1000kg/m3)。 1、试分析启动后水泵不输水(或风机不输风)的原因及解决措施 2.试分析泵与风机产生振动的原因 1、液力偶合器的主要部件,变速调节特点,性能特性参数,在火力电厂中的优点
非标设备通用技术要求规范本行的一定得看看为了在今后设备前期管理过程中,加强非标设备的质量控制工作,改善设备初期状态,确保设备在生产服役过程中有良好的开动率,特制定本规范。希望参与前期管理的技术人员参照执行,使技术要求更全面、准确、严密。 一、技术要求 (一)、操作面板 1、操作面板的位置要合适,便于操作及操作者观察设备运行情况。 2、指示灯要求设置齐全,不同功能的指示灯,使用不同颜色。具体要求为:电源指示灯——绿色,状态灯——黄色,故障灯——红色。 3、按钮开关设置齐全,能够独立运行的部件,都应有相应的手动操作按钮。 4、急停按钮采用红色蘑菇头自锁按钮,连接常闭点。 5、操作面板上的指示灯、按钮开关等,要有明确的名称指示标牌, 并要可靠固定。标牌采用金属刻字标牌。 6、设备自动运行时,在任何位置,按停止键设备停止后,都能用手动操作恢复到初始状态,并继续自动运行。 7、设备急停后,必须进行复位,才能进行手动操作;恢复到原位后,工作设备才可以再次自动运行。 8、操作面板打开时,应有防止操作面板打开过位、脱落的保护装置;操作面板的电线引线要可靠固定,并在打开过程中移动部位留有一定长度的余量 9、操作台箱体结构、元件布置结构应便于维修及部件更换。 10、可移动式操作台必须单独内置或外置软地线。
11、对灰尘、水气、油污比较大的环境,操作台箱体要有良好的密封设施。(二)、控制柜 1、控制柜要有标牌,标明设备型号、电气容量等技术参数。 2、控制柜应有电源总开关,电源总开关操作手柄应设置在控制柜两端外侧。 3、控制柜应装射照明灯。 4、控制柜应有插座,2线,3线220V、5A以上的电源插座各一组。 5、控制柜的各个元件应有永久性标牌,并应与图纸的名称一致。标牌位置不能贴在元件上,应就近合理布置。 6、控制柜元件布置位置应预留10%以上位置。 7、接线端子板的同一端子位置,最多接 3 根电线。 8、接线端子板要预留10%以上备用端子。 9、导线接点要压接专用接线端子,不得直接和端子板或元件连接。 10、备用线应预留10%以上,并标有备用线号。 11、控制柜元件固定方式要合理,便于拆装;不允许采用螺丝、螺母穿孔固定方式。 12、电气配线应有标号,并与图纸一致。标号要求为打印方式,长期使用不脱色,并能防水、防油。另外,同一电线两端的标号必须相同,接到同一端子上的电线的标号相同 13、控制柜的铁板厚度要保证强度, 根据控制柜的大小, 厚度要求不同。但一般铁板厚度要大于 1.0---1.2mm 。 14、控制柜的颜色为兰色或深灰色。 15、移动、运转装置的急停、安全装置等互锁信号,要求必须有继电器
QPSK 调制解调的simulink 仿真与性能分析 一、 设计目的和意义 学会使用MATLAB 中的simulink 仿真软件,了解其各种模块的功能,用simulink 实现QPSK 的调制和仿真过程,得到调制信号经高斯白噪声信道,再通过解调恢复原始信号,绘制出调制前后的频谱图,分析QPSK 在高斯信道中的性能,计算传输过程中的误码率。通过此次设计,在仿真中形象的感受到QPSK 的调制和解调过程,有利于深入了解QPSK 的原理。同时掌握了simulink 的使用,增强了我们学习通信的兴趣,培养通信系统的仿真建模能力。 二、 设计原理 (一)QPSK 星座图 QPSK 是Quadrature Phase Shift Keying 的简称,意为正交移相键控,是数字调制的 一种方式。它规定了四种载波相位,分别为0, 2π, π,32π (或者4 π,34π,54π,74π),星座图如图1(a )、(b )所示。 图1 QPSK 星座图 (二)QPSK 的调制 因为输入信息是二进制序列,所以需要将二进制数据变换成四进制数据,才能和四进制的载波相位配合起来。采取的办法是将二进制数字序列中每两个序列分成一组,共四种组合(00,01,10,11),每一组称为双比特码元。每一个双比特码元是由两位二进制 (a ) (b )
信息比特组成,它们分别代表四进制四个符号中的一个符号。QPSK 每次调制可传输两个信息比特。图2的(a )、(b)、(c)原理框图即为QPSK 的三种调制方式,本次课程设计主要采用的是正交调制方式。 (三)QPSK 的解调 QPSK 信号可以用两个正交的载波信号实现相干解调,它的相干解调器如图3所示,正交路分别设置两个匹配滤波器,得到I (t )和Q (t ),经电平判决和并转串即可恢复出原始信息。 (a )正交调制法 (b )相位选择法 (c )脉冲插入法 图2 QPSK 的主要调制方式
光模块基础知识大全、分类及选用 一、光模块基本知识 1、定义: 光模块:也就是光收发一体模块。 2、结构: 光收发一体模块由光电子器件、功能电路和光接口等组成,光电子器件包括发射和接收两部分。 发射部分是:输入一定码率的电信号经内部的驱动芯片处理后驱动半导体激光器(LD)或发光二极管(LED)发射出相应速率的调制光信号,其内部带有光功率自动控制电路,使输出的光信号功率保持稳定。 接收部分是:一定码率的光信号输入模块后由光探测二极管转换为电信号。经前置放大器后输出相应码率的电信号,输出的信号一般为PECL电平。同时在输入光功率小于一定值后会输出一个告警信号。 3、光模块的参数及意义 光模块有很多很重要的光电技术参数,但对于GBIC和SFP这两种热插拔光模块而言,选用时最关注的就是下面三个参数: 1)中心波长 单位纳米(nm),目前主要有3种: 850nm(MM,多模,成本低但传输距离短,一般只能传输500M); 1310nm (SM,单模,传输过程中损耗大但色散小,一般用于40KM以内的传输);
1550nm (SM,单模,传输过程中损耗小但色散大,一般用于40KM以上的长距离传输,最远可以无中继直接传输120KM); 2)传输速率 每秒钟传输数据的比特数(bit),单位bps。 目前常用的有4种: 155Mbps、1.25Gbps、2.5Gbps、10Gbps等。传输速率 一般向下兼容,因此155M 光模块也称FE(百兆)光模块,1.25G光模块也称GE (千兆)光模块,这是目前光传输设备中应用最多的模块。此外,在光纤存储系统(SAN)中它的传输速率有2Gbps、4Gbps和8Gbps。 3)传输距离 光信号无需中继放大可以直接传输的距离,单位千米(也称公里,km)。 光模块一般有以下几种规格:多模550m,单模15km、40km、80km和120km 等等。 除以上3种主要技术参数(波长,速率,距离)外,光模块还有如下几个基本概念,这些概念只需简单了解就行。 a、激光器类别 激光器是光模块中最核心的器件,将电流注入半导体材料中,通过谐振腔的光子振荡和增益射出激光。目前最常用的激光器有FP和DFB激光器,它们的差异是半导体材料和谐振腔结构不同,DFB激光器的价格比FP激光器贵很多。传 输距离在40KM以内的光模块一般使用FP激光器;传输距离≥40KM的光模块一 般使用DFB激光器。 b、损耗和色散 损耗是光在光纤中传输时,由于介质的吸收散射以及泄漏导致的光能量损失,这部分能量随着传输距离的增加以一定的比率耗散。色散的产生主要是因为不同
主要机械技术参数 一、轨道板生产非标专用设备 1、多功能车技术参数 2 3 4 5 外形尺寸(长*宽*高): 9945mm*6400mm*3600mm 储斗有效容积:≥ 4.2 m3 布料机轨距: 8400 mm 大车走行速度: 1.5 ~ 30 m/min 小车走行速度: 1.5 ~ 30 m/min 振动刮平装臵升降行程:≥ 300 mm 振动刮平装臵宽度: 6600 mm 适用混凝土类别:标准混凝土和钢纤维混凝土
混凝土碎石粒径:φ20 mm 6 7 9 10 轨道板规格:长×宽×高=6450 mm×2550 mm×200 mm 轨道板重量:约 9t 翻转角度: - 3°~183° 单个作业周期:不大于5 min 回转速度: 1.5~0.5 r/min,平稳匀速转动,无大的撞击提升高度:视现场实际工况而定(约650~950 mm)。 结构安全系数:大于2.0
卡紧点间距: 3900 mm; 卡紧装臵:有足够强度,应保证轨道板在翻转过程中,承受 轨道板自重及翻转带来的冲击。 动作过程: 提升、翻转、下落过程中要求动作同步,保持的 长中心线水平 电源: 380V±20% 频率: 50 Hz,带有稳压装臵 控制方式:电气控制,满足手动、自动 11、钢筋头切割机技术参数
二、混凝土搅拌站主要技术参数 2、配料系统 2.1 骨料储料仓 2.2 骨料秤 2.3 平皮带机 2.4 斜皮带
2.5 水路系统 2.6 外加剂系统 2.7 搅拌系统 3、计量系统3.1 水泥计量
3.2 掺和料计量 3.3 外加剂计量 3.5 水计量 4、电气系统 4.1系统采用交流380V、50Hz三相四(五)线制供电,每台HZS150Q 搅拌设备供电变压器容量应不小于400kVA。 4.2 称量装臵技术参数
1 引言 通信按照传统的理解就是信息的传输。在当今高度信息化的社会,信息和通信已成为现代社会的命脉。信息作为一种资源,只有通过广泛的传播与交流,才能产生利用价值,促进社会成员之间的合作,推动社会生产力的发展,创造出巨大的经济效益。而通信作为传输信息的手段或方式,与传感技术,计算机技术相互融合,已为21世纪国际社会和世界经济发展的强大推动力。 1.1 数字通信系统的模型 按照信道中传输的是模拟信号还是数字信号,相应的将通信系统分为模拟通信系统和数字通信系统。模拟通信系统是利用模拟信号来传递信息的通信系统,模拟信号有时也称连续信号。而数字通信系统是利用数字信号来传递信息的通信系统。数字信号有时也称为离散信号。近年来数字通信的发展远远超过模拟通信,数字通信在各个领域的应用也越来越广泛。本文讨论的也是数字通信中调制解调原理。数字通信系统的一般模型如图1所示。 图1 数字通信系统模型 其中,信源编码有两个基本功能:一是提高信息传输的有效性,即设法减少码元数目和降低码元速率。二是完成数/模转换,即当信息源给出的是模拟信号时,信源编码器将其转换成数字信号,信源译码是信源编码的逆过程。信道编码的目的是增强数字信号的抗干扰能力,信道译码是信道编码的逆过程。加密和解密是为了保证所传信息的安全。数字调制就是将数字基带信号的频谱搬移到高频处,形成适合在信道中传输的带通信号。图1为数字通信系统的一般化模型,实际的数字通信系统不一定包含图中的所有环节。模拟信号经过数字编码后也可以在数字通信系统中传输。 1.2 数字通信的特点 目前,数字通信在不同的通信业务中都得到了广泛的应用,究其原因也是数字通信相较于模拟同通信具有以下的一些优点。 (1)数字通信系统抗干扰能力强,且噪声不积累。数字通信系统中传输的 信息源 信源编码 加密 信道编码 数字调制 信道 数字解调 信道译码 解密 信源译码 受信者 躁声源
风机的八个主要性能参数 文件描叙: 风机的八个主要性能参数 风机的型号、规格千差万别,纷繁复杂,但是风机的本质不同与区别在于风机的主要性能参数,只要我们首先搞清楚这些性能参数的不同,对于我们了解风机和现实风机设备的选型具有很大帮助作用。那么,风机有那些主要性能参数呢?这主要包括:流量、压力、气体介质、转速、功率。下面一一分别介绍: 1. 流量 风机的流量是用出气流量换算成其进气状态的结果来表示的,通常以m3/h、m3/min表示。但在进出口压比为1.03以下(比如通风机范畴的风机)时,通常将出气风量看作为进气流量相同。在化学工业等领域中,以m3/h(常温常压)来表示的情况居多,它是将流量换算成标准状态,即摄氏0度、0.1MPa干燥状态。另外有时还以质量m按Kg/s来表示的。 流量亦称为气体量或空气量。将出气流量Q(出)换算成进气流量Q(进),可按下来公式计算: Q(进)=Q(出)×出气气体密度(kg/m3)/进气气体的密度(kg/m3) 将标准状态的流量Q(标准,m3/h,常温常压)换算成进气流量Q(进,m3/min),可按下列公式计算: Q(进)=Q(标准)×P(进气气体绝对压力,Pa)/(P(进气气体绝对压力,Pa)-S(相对湿度)×P(水蒸气饱和压力,Pa))×T(进气气体的热力学温度K)/273 2. 压力 为进行正常通风,需要有克服管道阻力的压力,风机则必须产生出这种压力。风机的压力分为静压、动压、全压三种形式。其中,克服前述送风阻力的压力为静压;把气体流动中所需动能转换成压力的形式为动压,实际中,为实现送风目的,就需有静压和动压。 静压:为气体对平行于气流的物体表面作用的压力,它是通过垂直于其表面的孔测量出来的。 动压=气体密度(kg/m3)×气体速度的平方(m/s)/2; 全压=静压+动压 风机的全压:是指风机所给定的全压增加量,即风机的出口和进口之间的全压之差。 3. 功率 风机的原动力(通常是电机或柴油机等)传递给风机轴上的功率为风机的轴功率
光模块的一些常识知识 光纤模块的构成:有发射激(TOSA),接受(ROSSA) 线路板 IC 外部配件 光纤模块接口分为FC型、SC型、LC型、ST型和FTRJ型。RJ45 光收发一体模块分类 按照速率分:以太网应用的100Base(百兆)、1000Base(千兆)、10GE SDH 应用的155M、622M、2.5G、10G 按照封装分:1×9、SFF、SFP、GBIC SFP+ XFP X2 XENPAK 1×9封装--焊接型光模块,一般速率有52M/155M/622M/1.25G,多采用SC接口 SFF封装--焊接小封装光模块,一般速率有155M/622M/1.25G/2.25G/4.25G,多采用LC接口 GBIC封装--热插拔千兆接口光模块,采用SC接口 SFP封装--热插拔小封装模块,目前最高数率可达 155M/622M/1.25G/2.125G/4.25G/8G/10G,多采用LC接口 XENPAK封装--应用在万兆以太网,采用SC接口 XFP封装--10G光模块,可用在万兆以太网,SONET等多种系统,多采用LC接口按照激光类型分:LED、VCSEL、FP LD、DFB LD 按照发射波长分:850nm、1310nm、1550nm等等 按照使用方式分:非热插拔(1×9、SFF),可热插拔(GBIC、SFP、XENPAK、XFP)光纤模块又分单模和多模 单模光纤使用的光波长为1310nm或1550 nm。单模光纤的尺寸为 9-10/125μm 它的传输距离一般 10KM 20kM 40KM 70KM 120KM 多模光纤使用的光波长多为850 nm或1310nm.多模光纤50/125μm或 62.5/125μm两种,它的传输距离也不一样,一般千兆环境下50/125μm线可传输550M,62.5/125μm只可以传送330M。(2KM 550M)
非标设备的分类及应用 “非标设备”就是非标准设备,不是按照国家颁布的统一的行业标准和规格制造的设备,而是根据自己的用途需要,自行设计制造的设备。且外观或性能不在国家设备产品目录内的设备。润泽工业装备公司是专业生产生产线体、精密模配、自动化生产设备、青岛非标设备,主要从事家电、通讯、汽车及医疗器械行业。下面就为大家简单介绍非标设备分类。 青岛润泽工业装备有限公司,专业从事家电、通讯、汽车及医疗器械行业的自动化流水生产线、物联传感、智能光电控制、PLC控制技术、机械手、机器人等于一体的研发、设计与制造。同时公司还生产加工钣金模具、塑料制品、精密零部件等。 润泽工业装备有限公司是国家高新技术企业,拥有青岛市科技局批复的市级研发中心,山东省机器人协会理事。通过十余年的不断发展,公司在研发、生产过程中积累了丰富的生产技术和管理经验,并在冷柜、冰箱、洗衣机生产线的自动化设备中取得了20余项国家专利。下面就由润泽工业装备给大家介绍下非标设备的分类以及应用。 根据生产经验,其设备分类有以下几种: 测量类,大中型的非标测量设备研发及制造;测量测绘工程承接特殊测量环境的测量系统设计开发;特殊被检参数的测量设备开发与制造。 实验测试及性能验证类,非标准实验测试机台设计与制造;新产品开发性能验证机台设计与制造。 自动化及机电一体化类,非标准的自动化生产线设计;PLC 控制系统及工控设备设计。液压与传动类,大中型的液压系统开发;液压类的传动系统开发。 专用机床类,各种小型的专用机床设计与制造;其他工作方式的专用机设计与制造。 非标设备的应用 非标自动化设备的由于其产品的广泛性,使其在应用中也具有广泛性。主要的应用的行业有: 1、汽车制造行业的汽车零部件的生产制造及安装; 2、食品行业的生产输送及包装; 3、电子电器生产线产品输送; 4、物流行业的仓储设施中也有广泛的应用; 5、加工制造业装配行业的应用
HUNAN UNIVERSITY 课程实验报告 题目:十QPSK调制解调实验 指导教师: 学生: 学生学号: 专业班级:
实验10 QPSK调制解调实验 一、实验目的 1. 掌握QPSK调制解调的工作原理及性能要求;了解IQ调制解调原理及特性 2. 进行QPSK调制、解调实验,掌握电路调整测试方法了解载波在QPSK相干及非相干时的解调特性 二、实验原理 1、QPSK调制原理 QPSK又叫四相绝对相移调制,它是一种正交相移键控。QPSK利用载波的四种不同相位来表征数字信息。由于每一种载波相位代表两个比特信息,因此,对于输入的二进制数字序列应该先进行分组,将每两个比特编为一组,然后用四种不同的载波相位来表征。 用调相法产生QPSK调制原理框图如图所示,QPSK的调制器可以看作是由两个BPSK调制器构成,输入的串行二进制信息序列经过串行变换,变成两路速率减半的序列,电平发生器分别产生双极性的二电平信号I(t)和Q(t),然后对Acosωt和Asinωt进行调制,相加后即可得到QPSK信号。
二进制码经串并变换后的码型如图所示,一路为单数码元,另外一路为偶数码元,这两个支路互为正交,一个称为同相支路,即I支路;另外一路称为正交支路,即Q支路 2、QPSK解调原理 由于QPSK可以看作是两个正交2PSK信号的合成,故它可以采用与2PSK信号类似的解调方法进行解调,即由两个2PSK信号相干解调器构成,其原理框图如图 三、实验步骤 在实验箱上正确安装基带成形模块(以下简称基带模块)、IQ调制解调模块(以下简称
IQ模块)、码元再生模块(以下简称再生模块)和PSK载波恢复模块。 1、QPSK调制实验 a、关闭实验箱总电源,用台阶插座线完成连接 * 检查连线是否正确,检查无误后打开电源。 b、按基带成形模块上“选择”键,选择QPSK模式(QPSK指示灯亮)。 c、用示波器观察基带模块上“NRZ-I,I-OUT,NRZ-Q,Q-OUT”的信号;并分别与“NRZ IN”信号进行对比,观察串并转换情况。 NRZ-I 与NRZ IN I-OUT与NRZ IN NRZ-Q 与NRZ IN Q-OUT与NRZ IN d、观测IQ调制信号矢量图。 e、观测IQ调制载波信号。
风机的性能参数及工作原理 风机的使用我们都不陌生,生活中对于风机的使用也只是局限在为温室或工厂中,主要作用是做好通风的设备,对于风机自身的性能参数没有做过了解。风机的型号、规格千差万别,纷繁复杂,但是风机的本质不同与区别在于风机的主要性能参数常见的是厂房的通风口就是采用轴流风机,室外机一般采用此种方式。此外,还有一种风机是混流式,用的比较少那么,今天我们就一起了来了了解下风机究竟是怎么工作的吧。 #详情查看#【风机】 【风机的性能参数】 生产车间里我们常见的风机有引风机、送风机、一次风机、密封风机,火检冷却风机等,这些风机一般都采用的是离心式风机,以获得较高的风压。离心风机是轴向进风,径向出风,静压较大,室内机一般采用此种方式。还有采用的是轴流风机,轴流风机气流沿着风机轴向流动,常见的是厂房的通风口就是采用轴流风机,室外机一般采用此种方式。此外,还有一种风机是混流式,用的比较少。
2、风机的主要性能参 风机的型号、规格千差万别,纷繁复杂,但是风机的本质不同与区别在于风机的主要性能参数。只要我们首先搞清楚这些性能参数的不同,对于我们了解风机和现实风机设备的选型具有很大帮助作用。那么风机有那些主要性能参数呢?这主要包括流量、压力、气体介质、转速、功率。 (1)流量 风机的流量是用出气流量换算成其进气状态的结果来表示的,通常以m3/h、m3/min表示。但在进出口压比为1.03 以下(比如通风机 范畴的风机)时, 通常将出气风量 看作为进气流量 相同。 流量亦称为气体 量或空气量。将出 气流量Q(出)换算 成进气流量Q(进)可按下来公式计算: Q(进)=Q(出)×出气气体密度(kg/m3)/进气气体的密度(kg/m3) 将标准状态的流量Q(标准m3/h,常温常压)换算成进气流量Q(进,m3/min),可按下列公式计算:Q(进)=Q(标准)×P(进气气体压力,Pa)/(P(进气气体压力,Pa)-S(相对湿度)×P(水蒸气饱和压力,Pa))×T(进气气体的热力学温度K)/273 (2)压力 为进行正常通风需要有克服管道阻力的压力风机则需产生出这种压力。风机的压力分为静压、动压、全压三种形式。其中克服前述送风阻力的压力为静压,把气体流动中所需动能转换成压力的形式为动压,实际中为实现送风目的,就需有静压和动压。
光模块SFP+与SFP、XFP、QSFP、QSFP+的区别 SFP收发器有多种不同的发送和接收类型,用户可以为每个链接选择合适的收发器,以提供基于可用的光纤类型(如多模光纤或单模光纤)能达到的"光学性能"。 可用的光学SFP模块一般分为如下类别: 850纳米波长/550米距离的 MMF (SX)、 1310纳米波长/10公里距离的 SMF (LX)、 1550 纳米波长/40公里距离的XD、 80公里距离的ZX、 120公里距离的EX或EZX,以及DWDM。 SFP收发器也提供铜缆接口,使得主要为光纤通信设计的主机设备也能够通过UTP网络线缆通信。也存在波分复用(CWDM)以及单光纤"双向"(1310/1490纳米波长上行/下行)的SFP。商用SFP收发器能够提供速率达到4.25 G bps。10 Gbps 收发器的几种封装形式为XFP,以及与SFP封装基本一致的新的变种"SFP+"。 GBIC(Gigabit Interface Converter的缩写),是将千兆位电信号转换为光信号的接口器件。GBIC设计上可以为热插拔使用。GBIC是一种符合国际标准的可互换产品。采用GBIC接口设计的千兆位交换机由于互换灵活,在市场上占有较大的市场份额。SFP (Small Form-factor Pluggable)可以简单的理解为GBIC 的升级版本。 SFP支持SONET、Gigabit Ethernet、光纤通道(Fiber Channel)以及一些其他通信标准。此标准扩展到了SFP+,能支持10.0 Gbit/s传输速率,包括8 gigabit光纤通道和10GbE。引入了光纤和铜芯版本的SFP+模块版本,与模块的Xenpak、X2或XFP版本相比,SFP+模块将部分电路留在主板实现,而非模块内实现 10G模块经历了从300Pin,XENPAK,X2,XFP的发展,最终实现了用和SFP一样的尺寸传输10G的信号,这就是SFP+。SFP凭借其小型化低成本等优势满足了设备对光模块高密度的需求,从2002年标准推出,到2010年已经取代XFP成为10G 市场主流。 SFP+光模块优点: 1、SFP+具有比X2和XFP封装更紧凑的外形尺寸(与SFP尺寸相同); 2、可以和同类型的XFP,X2,XENPAK直接连接; 3、成本比XFP,X2,XENPAK产品低。
高压变频器常用绝缘材料分析与对比 刘强 绝缘材料的定义 1.1广义定义:能够阻止电流通过的材料,俗称不导电材料。 1.2科学定义:能够建立强电场的物质,其绝缘电阻系数均应在 样的物质就称为电介质或绝缘材料。 二、绝缘材料分类 2.1根据国家机电行业统一标准,绝缘材料产品按形态结构、组成或生产工艺特征划分 为八大类,用一位阿拉伯数字来表示。 -1 --- 代表绝缘漆、可聚合树脂和胶类; -2 ――代表树脂浸胶纤维制品类; -3 ――代表层压制品、卷绕制品、真空压力浸胶制品和引拔制品类; -4 ――代表模塑料类; -5 ――代表云母制品类; -6 ――代表薄膜、粘带和柔软复合材料类; -7 ――代表纤维制品类; -8 --- 代表绝缘液体类。 第3大类层压制品包括: 层压板、层压棒和层压管。我司目前使用的 3240环氧酚醛玻璃布层压板)属于层压制品中的层压板。 2.2绝缘材料型号的命名及表示内容 2.2.1产品命名=树脂+基材+形态(也可加修饰语) 例如:酚醛纸层压板、环氧玻璃布层压板、高强度酚醛棉布层压板、酚醛棉布层压板等 2.2.2 型号命名及表示内容(型号通常以四位数字表示) X X X X ? X 一 产品附加号(可以用字母或数字表示) --------- 同一人类,小类、参考丄作温度的产品庁号 -------------- 参考工作温度 __________________ 同一大类的小类号 ■I _____________________ 大类号 第一位数字:表示绝缘材料的类别,如“ 3”表示绝缘层压制品类 第二位数字:表示小类产品代号(0~8个数字) -0 有机补强材料层压板类(纸、棉布,如 3021纸板、3025棉布板) -1——真空压力浸渍制品类(原为石棉层压板类) -2 ——无机补强材料层压板类(玻璃布等, 3240环氧玻璃布板) -3——空号 -4 ――空号 -5 ――有机补强材料层压管类(纸、棉布等,如 3520纸管、3526棉布管) 10A 7欧姆? cm 以上,这 3240环氧板(全称
PSK调制解调实验报告范文 一、实验目的 1. 掌握二相绝对码与相对码的码变换方法; 2. 掌握二相相位键控调制解调的工作原理及性能测试; 3. 学习二相相位调制、解调硬件实现,掌握电路调整测试方法。 二、实验仪器 1.时钟与基带数据发生模块,位号:G 2.PSK 调制模块,位号A 3.PSK 解调模块,位号C 4.噪声模块,位号B 5.复接/解复接、同步技术模块,位号I 6.20M 双踪示波器1 台 7.小平口螺丝刀1 只 8.频率计1 台(选用) 9.信号连接线4 根 三、实验原理 相位键控调制在数字通信系统中是一种极重要的调制方式,它具有优良的抗干扰噪声性能及较高的频带利用率。在相同的信噪比条件下,可获得比其他调制方式(例如:ASK、FSK)更低的误码率,因而广泛应用在实际通信系统中。本实验箱采用相位选择法实现相位调制(二进制),绝对移相键控(PSK 或CPSK)是用输入的基带信号(绝对码)选择开关通断控制载波相位的变化来实现。相对移相键控
(DPSK)采用绝对码与相对码变换后,用相对码控制选择开关通断来实现。 (一)PSK 调制电路工作原理 二相相位键控的载波为1.024MHz,数字基带信号有32Kb/s 伪随机码、及其相对码、32KHz 方波、外加数字信号等。相位键控调制解调电原理框图,如图6-1 所示。 1.载波倒相器 模拟信号的倒相通常采用运放来实现。来自1.024MHz 载波信号输入到运放的反相输入端,在输出端即可得到一个反相的载波信号,即π相载波信号。为了使0 相载波与π相载波的幅度相等,在电路中加了电位器37W01 和37W02 调节。 2.模拟开关相乘器 对载波的相移键控是用模拟开关电路实现的。0 相载波与π相载波分别加到模拟开关A:CD4066 的输入端(1 脚)、模拟开关B:CD4066 的输入端(11 脚),在数字基带信号的信码中,它的正极性加到模拟开关A 的输入控制端(13 脚),它反极性加到模拟开关B 的输入控制端(12 脚)。用来控制两个同频反相载波的通断。当信码为“1”码时,模拟开关 A 的输入控制端为高电平,模拟开关A 导通,输出0 相载波,而模拟开关 B 的输入控制端为低电平,模拟开关B 截止。反之,当信码为“0”码时,模拟开关A 的输入控制端为低电平,模拟开关A 截止。而模拟开关B 的输入控制端却为高电平,模拟开关B 导通。输
一、主机概况: 数据单位名称参数说明 77 [m] 风轮风轮直径 3 [-] 叶片数目 80 [m] 轮毂中心高 78 [m]63 塔高 3.7 [deg] 叶片安装角桨叶和变距之间的参考线相对于风轴回转平面的角 0 [deg] 叶片回转锥角叶片回转锥角 4 [deg] 仰角主轴和水平面的夹角 3668 [m] 风轮中心到塔心的距离凤轮回转中心和塔筒中心线的水平距离 0 [m] 侧偏移(主轴到塔心) 主轴和塔轴的水平偏差 Clockwise [-] 风轮自转方向(顺时针/逆时针) 当从上风向向风机看时,风机顺时针或逆时针转12000 [kg] 轮毂轮毂质量不含桨叶 0.05 [m] 轮毂重心从主轴和叶片轴的交点到轮毂质量中心的距离 14600 [kgm2] 轮毂转动惯量(x轴) 16640 [kgm2] 轮毂转动惯量(y轴) 16640 [kgm2] 轮毂转动惯量(z轴) 0.90 [m] 叶根半径螺孔中心圆半径 2.692 [m] 回转直径(球径) 回转直径(球径) top:φ2556*12 bottom:φ4113*28 塔架在一些截面的几何尺寸 78 [m] 高 [kg/m] 单位长度质量 [m] 直径 [Nm] 抗弯刚度 [mm] 壁厚 7800 [kg/m] 密度 2.06e11 [N/m] 杨氏模量 [Hz] 塔架一阶频率(弯曲下风向纵向) [Hz] 塔架一阶频率(横向) [-] 空气动力拖动系数 [-] 流体动力拖动系数 (海上适用) [-] 流体动力惯量系数 (海上适用) [m] 理论平均水深 (海上适用) [N/m] 基础平移刚度水平 [kg] 基础质量 [Nm/rad] 回转刚度绕水平轴 [kgm2] 基础转动惯量绕水平轴 3.5 [m] 机舱宽不含风轮和轮毂 8.44 [m] 机舱长 3.4 [m] 机舱高
专业课程设计报告题目:脉冲幅度调制解调系统 姓名: 专业:通信工程 班级学号: 同组人: 指导教师: 南昌航空大学信息工程学院 年月日
摘要 在通信系统中,调制与解调是实现信号传递必不可少的重要手段。所谓调制就是用一个信号去控制另一个信号的某个参量,产生已调制信号。解调则是调制的相反过程,而从已调制信号中恢复出原信号。信号从发送端到接收端,为了实现有效可靠和远距离传输信号,都要用到调制与解调技术。 该系统用于实现脉冲幅度调制解调,采用模块化结构设计,包括输入电路模块、脉冲发生电路模块、调制电路模块、解调滤波电路模块、功放输出电路模块。整个电路的设计借助于multisim 10仿真软件和数字逻辑电路相关理论知识,采用模块化的设计思想,使设计变得简单、方便、灵活性强。 该系统由采样定理实现了对输入正弦信号的调制,然后经由有源二阶滤波器实现了解调并输出正弦信号,最后通过lm386组成的功放电路驱动喇叭发出声音,更加直观地判断解调前后的声音变化,从而判断该系统是否实现了信号的调制解调。 关键词: 调制解调模块化设计通信系统采样定理
目录 第一章设计内容及要求 ··························································································错误!未定义书签。 1.1 脉冲幅度调制解调系统的设计要求及任务·················错误!未定义书签。 1.1.1 设计基本要求··························································错误!未定义书签。 1.1.2 设计任务及目标······················································错误!未定义书签。 1.2 设计的主要参考器件·····················································错误!未定义书签。第二章电路设计原理 ······························································································错误!未定义书签。 2.1 系统工作原理·································································错误!未定义书签。 2.2 设计方案比较和选择·····················································错误!未定义书签。 2.3 主要元器件介绍·····························································错误!未定义书签。 2.4 单元模块·········································································错误!未定义书签。 2.4.1 输入电路模块··························································错误!未定义书签。 2.4.2调制电路模块···························································错误!未定义书签。 2.4.3解调滤波电路模块···················································错误!未定义书签。 2.4.4脉冲发生电路模块···················································错误!未定义书签。 2.4.5 功放输出电路模块··················································错误!未定义书签。第三章系统的具体设计思路··················································································错误!未定义书签。 3.1 各模块参数设计···························································错误!未定义书签。 3.1.1 取样脉冲发生器设计··············································错误!未定义书签。 3.1.2 二阶RC有源滤波器设计 ······································错误!未定义书签。 3.1.1 取样脉冲发生器设计………………………………………………错误!未定义书签。第四章实验、调试及测试结果与分析 ···························································错误!未定义书签。 4.1系统安装与焊接······························································错误!未定义书签。 4.2 电路的调试·····································································错误!未定义书签。 4.3 实验结果记录及分析·····················································错误!未定义书签。 4.3.1取样脉冲发生结果分析………………………………………………错误!未定义书签。 4.3.2抽样脉冲波形分析 (14) 4.3.3解调波形分析 (15) 4.3.4 功放输出电路模块分析 (16)