第三章 塑性本构关系
§3.1 概述
一、单向拉伸条件下的塑性本构关系
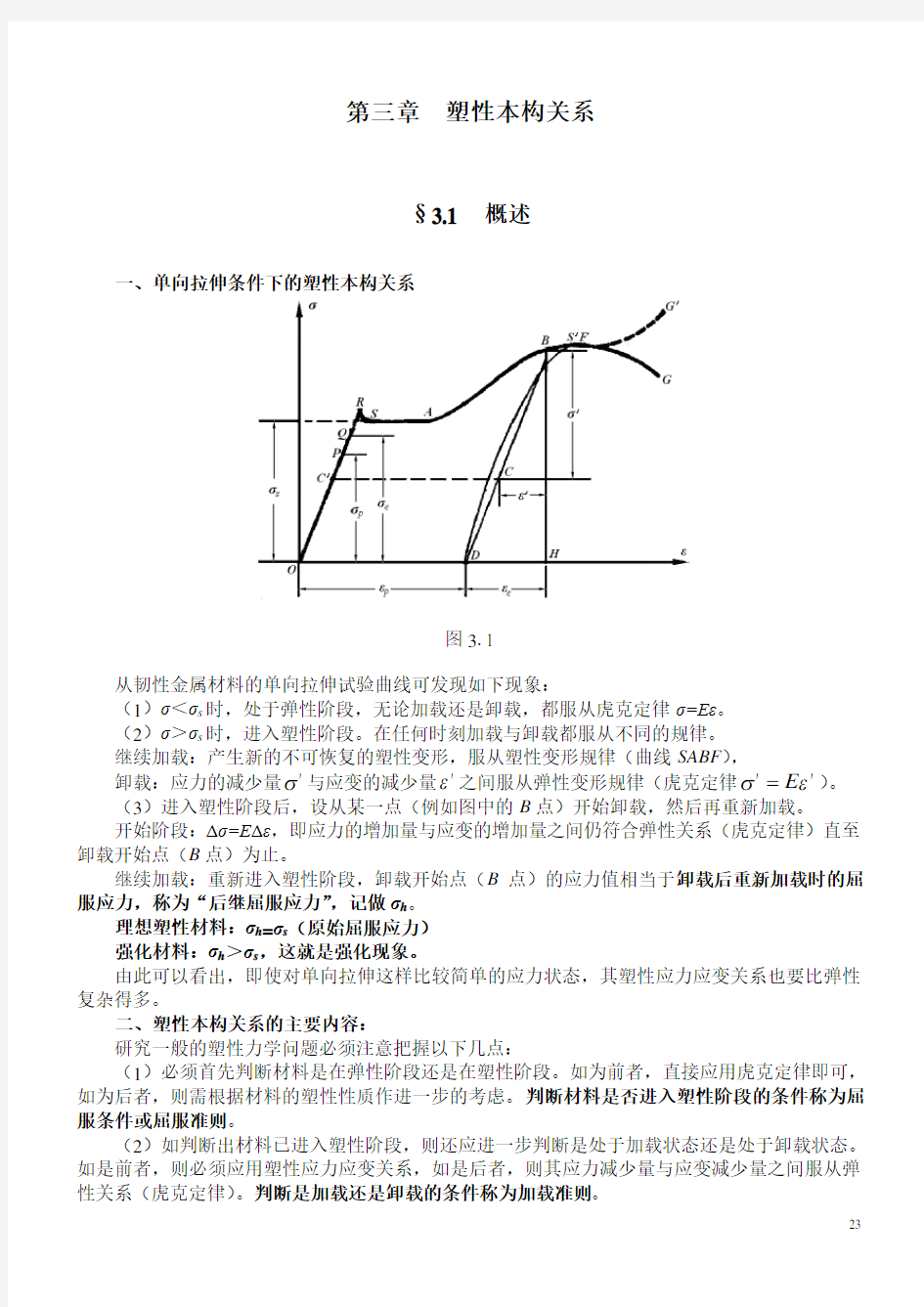
图3.1
从韧性金属材料的单向拉伸试验曲线可发现如下现象:
(1)σ<σs 时,处于弹性阶段,无论加载还是卸载,都服从虎克定律σ=Eε。 (2)σ>σs 时,进入塑性阶段。在任何时刻加载与卸载都服从不同的规律。 继续加载:产生新的不可恢复的塑性变形,服从塑性变形规律(曲线SABF ),
卸载:应力的减少量σ'与应变的减少量ε'之间服从弹性变形规律(虎克定律εσ'='E )。 (3)进入塑性阶段后,设从某一点(例如图中的B 点)开始卸载,然后再重新加载。
开始阶段:Δσ=E Δε,即应力的增加量与应变的增加量之间仍符合弹性关系(虎克定律)直至卸载开始点(B 点)为止。
继续加载:重新进入塑性阶段,卸载开始点(B 点)的应力值相当于卸载后重新加载时的屈服应力,称为“后继屈服应力”,记做σh 。
理想塑性材料:σh =σs (原始屈服应力) 强化材料:σh >σs ,这就是强化现象。
由此可以看出,即使对单向拉伸这样比较简单的应力状态,其塑性应力应变关系也要比弹性复杂得多。
二、塑性本构关系的主要内容:
研究一般的塑性力学问题必须注意把握以下几点:
(1)必须首先判断材料是在弹性阶段还是在塑性阶段。如为前者,直接应用虎克定律即可,如为后者,则需根据材料的塑性性质作进一步的考虑。判断材料是否进入塑性阶段的条件称为屈服条件或屈服准则。
(2)如判断出材料已进入塑性阶段,则还应进一步判断是处于加载状态还是处于卸载状态。如是前者,则必须应用塑性应力应变关系,如是后者,则其应力减少量与应变减少量之间服从弹性关系(虎克定律)。判断是加载还是卸载的条件称为加载准则。
(3)如材料是处于塑性阶段的加载状态;则应根据材料是理想塑性材料还是强化材料建立相应的塑性应力应变关系。
(4)如材料是强化材料,还要弄清σh 与σs 以及其他因素的关系,即强化条件。 对于单向拉伸而言,只要通过实验作出一条应力—应变曲线,以上问题都容易解决。
(1)屈服条件就是σ=σs ,式中σ就是单向的拉伸应力,σs 为屈服应力,可以通过拉伸实验定出。
(2)拉伸应力σ增加,即d σ>0时为加载,d σ<0时为卸载。
(3)塑性阶段加载时的塑性应力应变关系,也可由单向拉伸实验定出(即图中的曲线ABF )。 (4)如果是强化材料,σh 与σs 的关系也可由拉伸试验的应力—应变曲线得出。 在塑性力学问题中虽也有一些问题是属于单向应力状态的(如桁架、梁的纯弯曲等),但更多的问题则属于复杂应力状态。
因此塑性本构关系研究的主要内容就是在复杂应力状态下的屈服条件,加载准则,强化条件(只对强化材料),以及塑性应力应变关系的规律。
§3.2 屈服条件的一般形式
单向拉伸时,屈服条件是σ=σs (σs 由单向拉伸实验得到)。
复杂应力状态下,屈服条件和六个应力分量都有关。zx yz xy z y x τττσσσ , , , , ,都有关。即: 屈服条件: f 1(zx yz xy z y x τττσσσ , , , , ,)= C (3—1) f 1:各应力分量某种形式的函数,称为屈服函数。 C :与材料性质有关的常数。
假定材料各向同性,则屈服条件为:
f (321 , ,σσσ)= C (3—2) f 是321 , ,σσσ的对称函数(即三个主应力可以互换位置而函数值不变)。
而321 , ,I I I 都是321 , ,σσσ的对称函数,所以,可以把屈服条件写成应力张量三个不变量的对称形式的函数,即
屈服条件: f 2(321 , ,I I I )= C (3—3)
而应力球张量不影响屈服,因而上式中I 1,I 2,I 3可以用应力偏张量的三个不变量J 1,J 2,J 3代替。又∵J 1=0,故
屈服条件: f 3(J 2,J 3)= C (3—4)
因为J 3是应力偏量各分量的三次函数,当所有应力分量均改变符号(即由拉变压)时,J 3也变号。但由实验结果知,一般韧性金属材料抗拉和抗压是具有对称性质的,即所有应力分量均改变符号时,(3—4)式左方的屈服函数值应当不变。故可断定:
屈服函数应当是应力偏张量第二,第三不变量J 2和J 3的函数,同时又必须是J 3的偶函数。
§3.3 应力空间与屈服曲面
(一)应力空间的概念
把六个应力分量看成六维空间的坐标,则每一应力状态(用六个应力分量来表示)就相当于六维空间中的一个点。由于是用应力分量作为坐标,所以称这个六维空间为六维应力空间。屈服条件(3—1)式就是六维应力空间中的一个超曲面(为了区别于普通三维空间中的曲面,称为超曲面)。
屈服条件多数用以主应力或不变量表示的。因此,可按下面方式建立应力空间和屈服曲面: 应力空间:建立以σ1,σ2,σ3为坐标的三维空间,称为应力空间。
应力空间中的—点P ,就代表一个应力状态,它的三个主应力是σ1,σ2,σ3。 屈服曲面:屈服条件式(3.2)表示应力空间中的一个曲面,称为屈服曲面。
图3.2 图3.3
(二)等倾线与π平面
等倾线:应力空间中通过原点与σ1,σ2,σ3轴正方向成相同夹角的直线,称为等倾线(如图3.3中的OL 线)。
等倾线方向余弦: (31,31,3
1
) (3—5)
等倾线方程式: σ1=σ2=σ3 (3—6)
于是可知,等倾线上的任意点所代表的应力状态都是球张量(σ1=σ2=σ3 =σm ),其偏张量为零。 π平面:经过原点O 以等倾线为法线的平面称为π平面(见图3.3), π平面方程式: σ1+σ2+σ3=0 π平面方程式推导如下:
()
031313
1 · 321=??? ??++++k j i k j i
σσσ,
003
131********=++?=++σσσσσσ。 因而可知π平面上的任意点所代表的应力状态的σm =31(σx +σy +σz )= 3
1
(σ1+σ2+σ3) =0,即其
球张量为零,这个应力状态本身就是一个偏张量。
在应力空间中任一点P 对应的矢量OP 在三个轴上的投影分别等于321 ,σσσ和。可以把矢量OP 分解成沿等倾线和在π平面上的两个分量OQ 和OS ,则OQ 和OS 分别表示这一应力状态的球张量和偏张量。
(三)屈服曲面和屈服轨迹
当所有应力分量的绝对值都很小时,材料一定处于弹性阶段,这时在应力空间中表示这个应力状态的点在坐标原点附近。当各应力分量的绝对值(或某些分量的绝对值)足够大时,材料就会进入塑性阶段,这时在应力空间中表示这个应力状态的点就会离开原点相当的距离。因此,可以设想在应力空间中,靠近坐标原点且包括原点在内,有一个弹性区(在这个区内的点所表示的应力状态处于弹性阶段),而在其外则为塑性区(其中各点所表示的应力状态已进入塑性阶段)。这两个区的分界面就是屈服曲面,也就是屈服条件方程(3—2)式在应力空间中所代表的曲面。
屈服曲面与π平面的交线叫做屈服轨迹。 (四)π平面上的点所代表的应力状态
应力空间中一点P (或矢量)表示一个应力状态(σ1、σ2、σ3)(见图3.4(a )),将分
解为与三个坐标轴平行且首尾相接的三个矢量OA 、AB 、BP ,即OA ∥σ1轴,长为σ1,AB 平行于σ2轴,长为σ2,BP 平行于σ3轴,长为σ3。
(a ) (b ) 图3.4 将该应力空间投影在π平面上(见图3.4(b ))。B A ''、、S 分别为A 、B 、P 各点在π平面上的投影。OA 沿σ1方向,它在π平面上的投影A O '也必然沿'
1σO 方向。与等倾线的夹角α=3
1
arccos
,所以,在π平面上投影的长度为: O A '
= 12
32311σα=??
? ??-= (a ) 同理:
在π平面上的方向平行于'
2σ
O ,其长度为:
B A ''=
23
2
σ (b ) BP 在π平面上的方向平行于'3σO ,其长度为:
B 'S =
33
2
σ (c ) π平面上取右手直角坐标系(见图3.4(b )),以'
2σO 方向为y 轴,与之垂直的方向为x 轴,
则将A O ',B A '',S B '分别向x 轴及y 轴投影,即得矢量OS 沿x 轴及y 轴的分量为:
(OS )x = O A 'cos30°-B 'S cos30°
=
32(σ1-σ2) =2
1(σ1-σ2) (d ) (OS )y =-O A 'sin30°+A 'B '-B 'S sin30°
=32)2(6
1)2121(312321σσσσσσ--=-+- (e ) 故得OS 的长度:
28213232221233
2
)()()(3
1
J i ===
-+-+-==τσσσσσσσ (3—7) σi 为应力强度,τ8为八面体面上的剪应力。OS 在π平面上的方位角为
3arctg 231arctg )()(arctg 3
1312σ
σμσσσσσω=?????????? ??---==x y OS OS (3—8) σμ为应力状态的Lode 参数。
对一个已知状态(σ1,σ2,σ3),由(3—7)和(3—8)可以得到π平面上代表它的偏张量的点S 的位置。
如果规定 σ1≥σ2≥σ3 (f ) 则 -1≤σμ≤1 (g ) 因而 -30°≤σω≤30° (h )
即在π平面上代表应力偏张量的点S 将坐落在'1σO 轴正方向与'
3σO 轴负方向之间。 对单向拉伸,σμ=-1,σω=-30°,S 点位于'
1σO 轴正方向。 对单向压缩,σμ=+1,σω=30°,S 点位于'
3σO 轴负方向上。
对纯剪切,σμ=0,σω=0°,S 点位于'
1σO 轴正方向与'
3σO 轴负方向的分角线上。 如果主应力顺序不按(f )式规定而可以任意排列,则S 点可位于π平面的任何点,而没有(h )式的限制。
反过来说,如果已知π平面上一点S ,就不可能唯一地确定它所代表的原始应力状态,因为可以加上任意大小的球张量而不改变π平面上S 点的位置。不过可以根据S 点的位置唯一地确定它所代表的应力偏张量的大小。
由(e )式得
(OS )y =
)2(6
1
312σσσ-- * 应力偏张量为:
????
??????---=??????????=m z zy zx yz m y yx xz xy m x z zy zx yz y yx xz xy x ij s s s s s s s s s s σστττσστττσσ
在主应力坐标系下,
??
??
?
?????---=??????????=m z m m ij s s s s s s s s s s σσσσσσ 0 0 0 0 0 0 21332312322113121
故有
s 2 =()3
231
21232122σσσσσσσσσ--=++-=-m 。
∴221232s =--σσσ,代入*式得:
(OS )y =
22233·61s s = s 2 =32(OS )y =3
2
σω (3—9a )
用同样的方法可以求得:
s 1 = 3
2
)120 +σω (3—9b ) s 3 =
3
2
)120 -σω (3—9c ) 求s 1时,取'
1σO 的方向为y 轴正方向,相当于y 轴顺时针旋转了120°,相应地,x 轴的正方向也顺时针旋转了120°,此时,的方向与x 轴的正方向的夹角变成了ωσ+120°,类比(3—9a )式,就可以得(3—9b )式,同理可得(3—9c )式。
由(3.9)式即可以确定π平面上一点S 所代表的应力偏张量。由*式还可以看出π平面上任何一条与'
2σO 轴垂直的直线必然代表s 2 =常数(因为这条直线上(OS )y 是常数)。同理可知,代表s 1 =常数及s 3 =常数的必然是垂直'
1σO 轴及'
3σO 轴的直线。由(d )式还可看出π平面上任何一条与'
2σO 轴平行的直线上必然有σ1-σ3=常数(因为这条直线上(OS )x 是常数)。同理可知,代表σ2-σ3 =常数及σ1-σ2=常数的必然是平行'
1σO 轴及'
3σO 轴的直线。
(六)八面体面上剪应力的方位
在第二章中已经求出了八面体面上正应力σ8和剪应力τ8的大小:
σ8 =3
1
(σ1+σ2+σ3)
τ8 =213232221)()()(3
1
σσσσσσ-+-+- 现在再来求一下τ8在八面体面内的什么方向。
设在受力物体中一点O 处其主应力方向为O 1、O 1、O 3(图3.5),ABC 为八面体面,其上作
用的应力为正应力σ8与剪应力τ8,O ‘
为O 点在八面体面上的投影,设以p 8表示八面体面上的总应力,并设其沿O 1、O 1、O 3轴的分量为p s 1,p s 2,p s 3,则由平衡方程可得:
图3.5
?
??
?
???
??===33221131
313
1σσσs s s p p p (3—10)
现在再将这三个应力分量向八面体面ABC 上投影,其大小分别为
?
???
???
??======33'
322'211'1
3232323232
32σσσs s s s s s p p p p p p (3—11)
其在八面体面内的方向应分别平行于A O ',B O ',C O ',这些投影的矢量和自然就应当是八
面体面上的剪应力τ8(因为σ8在八面体面上的投影为零)。
图3.6
图3.6所示为八面体面,其上A O ',B O ',C O '应互成120°角。
从O '开始首尾相接作平行A O '的矢量H O ',其长度H O ' ='1s p ,平行于B O '的矢量HJ ,其长度HJ ='2s p ,平行于C O '的矢量,其长度JK ='3s p ,则矢量O '即应代表τ8的大小及方向。作x ',y '轴分别垂直与平行于B O ',并以O '与x 轴的夹角θ代表τ8在八面体面上的方位。 现在比较图3.6上的力多边形O 'HJK 与图3.4(b )中的力多边形O B A ''S ,发现二者完全相似(下式中带括号的量是指图3.4(b )中的量)。
3
1
)()()(='=''=''S B JK B A HJ A O H O (3—12) ∴ τ8 =O 'K =3
1
(OS )
也与(3.7)式完全一致。因而方向也与(3.8)式确定的方向完全相同。
3
arctg
σ
σμωθ== (3—13)
故得结论:如果把应力空间的σ1,σ2,σ3轴取成和物体内一点O 的相应主应力方向相同,则表示O 点应力偏张量的矢量在π平面上的方向与O 点处八面体面上剪应力方向一致。必须注意:
在这里,“把应力空间的σ1,σ2,σ3轴取成和O 点主应力方向相同”这一前提是不可缺少的。因为应力空间的三个坐标只表示各主应力的大小,并不代表方向,一般说来,不一定和受力物体中任一点的主方向一致。一般物体中的不同点可能主应力方向也不相同,但其应力状态则可在同一个应力空间中用各自相应的点来表示。此外,还要区别清楚π平面和八面体面是两个意义完全不同的面,不可混淆,前者是应力空间中表示应力空间中表示球张量为零的平面,后者则是受力物体中一点上的特定方向的截面。(3—13)式只是一种通过类比得到的结论。
§3.4 Tresca 屈服条件
实验表明,最大剪应力达到一定数值时材料就开始屈服,屈服条件为:
τmax =k (3—14)
k 为常数。
一、各主应力按大小顺序排列(即σ1>σ2>σ3) τ
max =
2
3
1σσ-
代入(3—14)得:
σ1-σ3 = 2k (3—15‘) 设单向拉伸实验的屈服应力为σs ,单向拉伸是复杂应力状态的特例,因此也应满足(3—15‘)。
将σ1=σs ,σ2=σ3=0代入(3—15‘
)得:
k=
2
s
σ (3—16)
(3—16)代入(3—15‘
)得屈服条件为:
σ1-σ3 =σs (3—17)
设由薄壁筒扭转实验得到的屈服剪应力为τs ,纯扭转也是复杂应力状态的特例,因此也应满足(3—15)。将τmax =τs ,代入(3—15)得:
k =τs (3—18) 代入(3—17)得:
在Tresca 屈服条件下σs 和τs 的关系:
τs =2
s
σ (3—19)
二、各主应力不按大小顺序排列 (3—17)可改写为:
σmax -σmin =σs (3—20)
(3—20)等价于下式中至少有一个式子成立:
??????????
?=+-=--=+-=--=+-=--0
000
03232212131
31s s s s s s σσσσσσσσσσσσσσσσσσ (3—21) (3—21)等价于
()[]()[]()[]
0 2
2
1322
3222
21=------s s s σσσσσσσσσ
(3—22)
(3—22)是各主应力大小顺序未知时屈服的必要条件。
上式可化为:
0692746
24
2
22
2
33
2=-+--s s s J J J J σσσ (3—23)
是J 3的偶函数。 (3—17)、(3—22)和(3—23)是Tresca 屈服条件的三种不同的表达方式。该屈服条件常用在主应力大小顺序为已知的问题上。
说明:
(1)在应力空间中表示Tresca 屈服条件的屈服曲面是一个以等倾线为轴线的无限长正六角柱面。在π平面上的屈服轨迹为正六边形ABCDEF ,如图3.8所示。
下面分析(3—20)式与屈服轨迹正六边形ABCDEF 的对应关系。
图3.7
OA 是应力空间中的O σ1轴在π平面上的投影,因此A 点对应单向应力状态。而A 点又在屈服曲面上,因此应有O σ1=σ1=σs ,投影到π平面上,应乘以
,,,而32311sin 31cos sin 2
=?
?
?
??-==ααα因此,OA (正六边形的边长)为: OA = s s σασ3
2
sin = (3—24) 对AB 边上任意何一点S 都有:
2
30cos )(s
x OA OS σ=
?=
图3.8
代入前面得到的算式(OS )x =
)(2
1
31σσ-,得: s σσσ=-31。
故知,AB 边代表(3—21)式中的第一式,其中A 点σω=-30°为单向拉伸应力状态。B 点ωσ=30°为单向压缩应力状态。G 点ωσ=0°为纯剪切应力状态。
同理可证,DE 、FA 、CD 、BC 、EF 各边分别代表(3—21)式中的后五式。C 、E 都代表单向拉伸应力状态,D 、F 都代表单向压缩应力状态,各边中点都代表纯剪切应力状态。
(2)对于平面应力状态,σ3=0,方程组(3—21)化为:
??????????
?-==-=-=--==s
s s s
s s σσσσσσσσσσσ
σσσ2221211
1 (3—25) σ3 = 0的平面(σ1,σ2坐标面)与正六角柱屈服曲面的交线为斜六边形F E D C B A ''''''(如图3.9所示)。方程组(3—25)中各式分别代表F E C B D C A F E D B A ''''''''''''、、、、、各边。
图3.9
§3.5 Mises 屈服条件
Tresca 屈服条件完全忽视了居于中间大小的主应力对材料屈服的影响,这是和实际有出入的。
图3.10
Mises 用Tresca 屈服条件的屈服轨迹正六边形ABCDEF 的外接园作为屈服轨迹。
由(3—24)式知圆的半径为3
2
σs ,
圆的方程为:
R 2 =
2
3
2s σ (3—26) R 代表屈服曲面上各点对应的应力偏张量的矢量长度。由(3.7
22J =得:
R
==22J
代入(3—26)式得:
Mises 屈服条件的第一种表达方式: 3
2
2s J σ=
(3—27)
由])()()[(6
1
2132322212σσσσσσ-+-+-=
J 的定义式可把上式变成Mises 屈服条件的第二种表达方式:
22132322212)()()(s σσσσσσσ=-+-+- (3—28)
说明:
(1)在π平面上,Mises 屈服轨迹是一个半径为
s σ3
2
的圆。它的屈服曲面是一个以等倾线为轴线的无限长圆柱面。
(2)以σ1 =σs ,σ2 =σ3 = 0代入(3—28)式,得到恒等式,说明Mises 屈服条件符合单向拉伸实验的结果。
(3)对于纯剪应力状态,屈服时应有σ1=τs ,σ2=0,σ3=-τs ,代入(3—28)得:
τs =
3
s
σ=0.557σs (3—29)
与(3—19)式相比可知,Tresca 屈服条件和Mises 屈服条件在τs 和σs 的关系上有约15%的差异。
因此,Mises 屈服条件和Tresca 屈服条件在单向拉压应力状态下完全一致,在纯剪切时二者差异最大,约为15%。
(4)对于平面应力状态,σ3 = 0,(3—28)式化为: 2
2
2212
1s σσσσσ=+- (3—30)
在应力空间中,σ3=0平面(σ1,σ2坐标面)与Mises 屈服曲面的交线为一斜椭圆,它外接于Tresca 屈服轨迹的斜六边形。
§3.6 加载曲面和加载准则
(一)加载曲面(后继屈服面)
由单向拉伸试验知道,对理想塑性材料,一旦屈服以后,其应力保持常值。卸载后再重新加载时其屈服应力的大小也不改变(没有强化现象)。对于强化材料,在开始屈服之后,随着塑性变形的发展其应力值继续增加。卸载后再重新加载至原来开始屈服的应力时材料并不屈服,要加到原来卸载开始时的应力,材料才再次屈服。因此对于强化材料,重新加载时的屈服应力要高于原始加载时的屈服应力,这就是强化现象。而复杂应力状态与单向拉伸状态是类似的,即:
复杂应力状态下,理想塑性材料在应力空间中的屈服曲面具有固定的大小和形状,屈服以后经过卸载并重新加载,仍然保持原来的屈服曲面。
对于强化材料,我们把在应力空间中由屈服条件规定的曲面叫做初始屈服曲面,记做Σ,若加载至超出了屈服曲面后卸载,然后再重新加载时,屈服曲面比初始屈服面Σ向外扩大了,这就是强化现象。以Σ‘表示这个扩大了的新屈服面,称为后继屈服面或加载曲面(见图3.11所示);
以?=0表示加载曲面,称为加载函数。
图3.11
(二)加载准则
如果通过屈服条件判断材料已进入塑性阶段,则下一步必须确定其应力状态的变化是加载达是卸载。因为在塑性阶段对于加载和卸载其应力应变关系服从不同规律,加载时还要产生新的塑性变形,卸载时则不产生新的塑性变形。
对于单向应力状态,这个问题是很容易回答的。无论是拉伸还是压缩,其应力绝对值增大时即为加载,减小时即为卸载。但在复杂应力状态下就不那么简单了。可能出现一些应力分量绝对值增加而另一些分量绝对值减小的情况,这时究竟应该是加载还是卸载呢?必须有一个准则来判断。
在建立屈服条件时,曾根据屈服函数)(ij f σ的大小来判断材料是否屈服,于是可以想到,可
依照应力状态变化时的屈服函数f 值的变化来判断是加载还是卸载。
材料是强化材料时,在应力空间中,代表应力状态0
ij σ的A 点当应力状态变化、移向初始屈服曲面Σ以外,即df >0时为加载。A 向Σ面以内移动时,即df <0时为卸载。A 在Σ面上移动时,即df = 0时为中性变载。故
对强化材料:
df >0,加载
df <0,卸载 (3—31) df = 0,中性变载
由实验结果得知,
加载时产生新的塑性变形,卸载及中性变载时均不产生新的塑性变形,其各应力分量与各应变分量的改变服从弹性规律。
对理想塑性材料,一旦进入塑性阶段以后,在应力空间中代表应力状态的点均位于屈服曲面)(ij f
σ
=C 上。由于没有强化现象产生,应力状态变化时,尽管塑性变形还可以不断增长,而屈服函数)(ij f
σ的值却不能再增长。即不可能有df >0的情况出现。代表应力状态的点只能在屈服面上移动,这时有df = 0,属于加载。当代表应力状态的点移向屈服面以内时,df <0,属于卸载。
故对理想塑性材料:
df <0,卸载 df = 0,加载
采用Mises 屈服条件时,3
2
2s J σ=,与屈服条件 f (321 , ,σσσ)= C 相比较,J 2就是屈
服函数 f (321 , ,σσσ),
3
2
s σ就是常数C 。所以df=dJ 2。而应力强度23J i =σ,因此,也可以
把i σ看成屈服函数f ,这时的加载准则为:
对强化材料
d σi >0或d J 2>0,加载
d σi <0或d J 2<0,卸载 (3—35) d σi = 0或d J 2 = 0,中性变载
对理想塑性材料
d σi = 0或d J 2 = 0,加载 d σi <0或d J 2<0,卸载
加载时材料产生新的塑性变形,故产生塑性比功增量p
ij ij p d dW εσ=>0。(比功为单位体积所作之功),而卸载或中性变载时,不产生新的塑性变形,即 p
ij d ε= 0,故0=p dW (由于塑性变形不能恢复,故塑性比功不可能为负)。所以也可以根据p dW 来判断加载或卸载:
dW p >0,加载
dW p =0,卸载或中性变载
说明:
加载或卸载都是对一个点上的整个应力状态而言。在加载过程中某些应力分量可能增加而另一些可能减小,但只要根据加载准则判断是加载,则就说在这个点是加载。如是加载,则在所有方向上都要使用塑性应力应变关系;如是卸载,则在所有方向上都要使用弹性应力应变关系。
(3—34) (3—36) (3—37)
§3.7 简单加载和复杂加载
(一)加载方式
对一个复杂应力状态,可以根据加载过程中各个应力分量是否成比例增长而分为简单加载与复杂加载两种方式。
图3.12
(1)简单加载:在加载过程中各应力分量按某一参数t 成比例地单调增长,即0
ij ij t σσ= (这
里0
ij σ为某一固定的应力状态)时,称为简单加载,即比例加载。简单加载时,在应力空间中代
表应力状态的点在连接原点O 与代表应力状态0
ij σ的点A 的直线上移动。加载路径是通过原点的
直线。
(2)复杂加载:不符合上述比例关系的加载方式叫复杂加载。 复杂加载时加载路径可以是通过原点或不通过原点的曲线或折线。 (二)简单加载原理
简单加载定义是针对受力物体中一点应力状态给定的。但荷载是施加在整个物体上,这样就提出一个问题:满足什么样的条件,才能在物体内所有各点上实现简单加载呢?苏联力学家提出的简单加载定理部分地回答了这个问题。
简单加载定理:对小变形的受力物体,满足下列三个条件即可保证物体内所有各点都处于简单加载(充分条件):
(1)物体上所有外加荷载(包括表面力和体积力)成比例增长。如有位移边界条件,只能是零位移边界条件;
(2)应力强度和应变强度呈幂关系n
i i A εσ=; (3)材料不可压缩,即泊松比μ=
2
1。 实际上,当材料进入塑性后,上面第三条基本是满足的,而第二条中的幂关系又可以近似地描述大部分金属材料的应力~应变关系。因而可以近似地认为只要物体上的所有外荷载成比例增长,就可在物体内所有各点实现简单加载。
§3.8 强化条件
实验结果表明,对强化材料,其加载曲面与初始屈服曲面相比,不仅有形状及大小变化,而且还有位置的移动。
因此,Tresca 屈服条件和Mises 屈服条件只适用于理想塑性材料;或者只作为强化材料第一次开始屈服的初始屈服面,而不能正确描述已进入塑性阶段并己产生一定塑性变形(强化)以后的屈服性质。
实验结果还表明,加载曲面与初始屈服曲面相比,其形状大小的变化及位置的移动规律相当复杂,难以用数学模型来精确描述。因此,实际计算中往往作各种不同的假设,再依据这些假设建立相应的强化条件。
(1)等向强化假设
等向强化假设认为不论加载路径如何,随着塑性变形的增加,其加载曲面在原始屈服曲面基础上向各方向作均匀膨胀,也就是说
加载曲面与原始屈服曲面在几何形状上完全相似,其中心位置没有移动。随着塑性变形大小的不同,其胀大的程度也不同。
根据这种假设,只要知道加载路径中最远离初始屈服曲面的点,就可以得到对应的加载曲面。
图3.13
设屈服函数为f (s ij )(其中s ij 为应力偏张量),则。 理想塑性材的屈服条件为
f (s ij ) =C (3—38)
在等向强化假设下的加载曲面(即强化条件)为:
f (s ij ) =C (q ) (3—39)
q 为强化参数,恒为正值。
如果取Mises 屈服函数,对理想塑性材料屈服条件为: J 2 =3
2
s σ (3—40)
而J 2 =
2
1
s ij s ij ,故 s ij s ij =
2
3
2s σ= C (常数) (3—41) 则在等向强化假设下的强化条件即可写为:
s ij s ij = C (q ) (3—42) 现在讨论强化参数q 的取法:
(a )取q 为塑性比功,即令
q = W p =??
=
p ij ij p d dW εσ (3—43)
这时强化条件(3—42)式可写为:
s ij s ij = C (W p ) (3—44) 函数C (W p )可以由单向拉伸或纯剪实验得到。
(b )取q 为积累的塑性应变,即令 q = ()?i
p d ε (3—45)
这时强化条件(3—42)式可写为
s ij s ij = C (
()?i
p d ε) (3—46)
这里,i p
d )(ε是塑性应变增量的“强度”,在一般情况下它并不是塑性应变强度p
i ε的微分,只有在各应变增量成比例的情况下才有: ()
??
==p i p i i
p
d d εεε)( (3—47)
函数C (
()?i
p d ε)可由单向拉伸或纯剪切实验确定。
(c )单一曲线假设
如果取q 为加载路径终点的应变强度εi (不是塑性应变强度p
i ε),即令q =εi ,这时强度条件(3—41)式可写为:
s ij s ij = C (εi ) (3—48) 应力强度σi =
ij ij s s J 2
3
32=
,故(3—48)式也可写为 )(i i F εσ= (3—49)
照这种假设,对不同的应变状态只要有相同的应变强度εi ,则尽管其所对应的应力状态可能不同,但必有相同的应力强度σi 值。也就是说,应力强度σi 和应变强度εi 之间有单一的曲线关系,曲线方程是(3—49)式。所以称为“单一曲线假设”。这条曲线,即为图3.13(a )中的曲线OA ,可由单向拉伸或纯剪切实验得出。
图3.13
(3—49)也可以写成:
i i i g εεσ)(= (3—50)
式中, αεσεtg )(==i i
i g (3—51)
上式即为图3.13(a )中的割线OA 的斜率,可以称为塑性模量。
对理想塑性材料,s i σσ=,有 i s
i g εσε=
)( (3—52)
对实际材料曲线斜率为正,即有:
i
i i d d g εσε=)(≥0 (3—53)
又因曲线总是上凸的,故有: αβεσεσεεtg tg d d g i
i
i i i i -=-=
')(<0 (3—54) 因i ε≥0,故有
)(i g ε'<0 (3—55)
因而)(i g ε为减函数(见图3.13(b ))。
(3—49)式也可写成: i i i g σσε)(= (3—56) 同样可证明)(i g σ有以下性质:
)(i g σ'>0 (3—57)
由(3—57)式知)(i g σ为增函数(见图3.21(b ))。
基于以上几种强化条件形式都比较简单,便于运算。在加载路径没有明显反复时,也能基本上与实验结果相符合,所以在实际问题中应用较多。但它最突出的缺点是在卸载后反向加载时不能正确反映Bauschinger 效应。如图3.20(a )所示,由O 出发经A 到达A ‘点,再卸载,然后反向加载至A “点才能再次屈服,即反向屈服应力不但没有降低,反而与正向有同等程度的提高,这是不符合实际的。下面介绍的随动强化假设可以克服这一缺点。
(2)随动强化假设(运动强化假设)
在图3.20(a )中,Σ为初始屈服面。设从应力空间原点O 开始加载,经过Σ面上一点A 以后继续加载直至A ‘点。随动强化即假设加载曲面Σ’与初始屈服面Σ形状大小完全一致,但随加载路径而平移。也就是说,加载至A ‘点后经过卸载再重新沿OAA ‘路径加载时,要到达A ‘点才重新屈服。但若沿相反方向加载,则到图3.20(b )中的A “点即发生屈服,也就是在强化的相反方向加载时其屈服应力将降低。
设强化后加载曲面的中心移至O ‘点。以a ij 表示屈服曲面中心移动的距离OO ‘在六维应力空间中的各分量,则在随动强化假设下的强化条件应为:
f (s ij -a ij ) = C (3—58) a ij 的大小与塑性应变张量p ij ε成正比,即有:
a ij = h p ij ε (3—59)
式中,h 为随材料而不同的常数,可由实验确定。
随动强化假设的最大优点是能比较正确地反映Bauschinger 效应,在承受反复荷载时比较容易反映实际情况。但加载曲面的形状大小完全没有改变,与实验结果也不符。只有在加载路径与原来强化方向比较接近的情况下,这一假设才与等向强化假设一样能较好地符合实验结果。此外等向强化假设在数学运算上更为简便,应用较多。
(3)其他形式的假设
由于在强化过程中加载曲面的变化十分复杂,不仅对不同材料和不同加载路径有明显不同,而且随屈服的定义不同(例如定义比例极限作为屈服,或定义产生某一规定的塑性应变强度作为屈服)也差异甚大。因而试图用简单的数学模型精确地加以描述是极其困难的。如上所述,以上两种假设各有其优缺点,为了弥补不足,有许多学者提出过各种其他形式的假设。
其中一种是将等向强化与随动强化结合起来,认为在强化时,初始屈服面既有位置的移动又有大小的变化,如图3.23所示。
l 等向强化的加载曲面
图3.14
这时的强化条件应写为:
f(s ij-a ij) = C( q ) (3—60)
此外,有的学者在实验中发现,加载曲面在强化过程中的加载路径终点(如图3.23中的的A ‘点)附近形成尖点(如图3.24)。于是有人提出使加载面具有尖点的滑移理论等,但这类理论目前尚没有得到广泛应用。一则因为它们的数学运算非常复杂,不便实用;二则对于加载曲面是否确有尖点的问题,目前尚有争论。多年来,经过众多学者的实验验证,肯定与否定的都有,一时尚难分伯仲。
§3.9 小结
必须掌握的内容:
1.单向拉伸条件下的塑性本构关系。
2.后继屈服应力及强化现象的概念。
3.塑性本构关系的主要内容。
4.复杂应力状态下的屈服条件(四种表达方式),屈服函数的特点。
5.应力空间和屈服曲面的概念。
6.等倾线与π平面的概念、方向余弦、方程式。
7.应力空间中任一点P对应的矢量OP分解成沿等倾线和在π平面上的两个分量OQ和OS 的意义。
8.屈服曲面和屈服轨迹的概念。
9.已知一点的应力状态(σ1,σ2,σ3),求其在π平面上对应的应力偏张量的大小和方位的公式。OS所代表的原始应力状态的不唯一性。
10.已知OS,求应力偏张量的分量的公式。
11.已知一点的应力状态(σ1,σ2,σ3),求其八面体面上剪应力的方位的公式。
12.Tresca屈服条件的三种不同的表达方式及适用的条件。
13.在Tresca屈服条件下σs和τs的关系。
14.应力空间中表示Tresca屈服条件的屈服曲面和在π平面上的屈服轨迹(包括平面应力状态下的屈服轨迹)。
15.Mises屈服条件的两种不同的表达方式及适用的条件。
16.在Mises屈服条件下σs和τs的关系。
17.应力空间中表示Mises屈服条件的屈服曲面和在π平面上的屈服轨迹(包括平面应力状
态下的屈服轨迹)。
18.加载曲面和加载函数的概念。
19.强化材料和理想塑性材料的加载准则(几种不同的表达形式)。
20.简单加载和复杂加载的概念。
21.简单加载原理。
22.强化条件的概念。
23.等向强化假设和随动强化假设。
弹性力学复习资料 一、简答题 1.试写出弹性力学平面问题的基本方程,它们揭示的是那些物理量之间的相互关系在应用这些方程时,应注意些什么问题 答:平面问题中的平衡微分方程:揭示的是应力分量与体力分量间的相互关系。应注意两个微分方程中包含着三个未知函数σx、σy、τxy=τyx ,因此,决定应力分量的问题是超静定的,还必须考虑形变和位移,才能解决问题。 平面问题的几何方程: 揭示的是形变分量与位移分量间的相互关系。应注意当物体的位移分量完全确定时,形变量即完全确定。反之,当形变分量完全确定时,位移分量却不能完全确定。 平面问题中的物理方程:揭示的是形变分量与应力分量间的相互关系。应注意平面应力问题和平面应变问题物理方程的转换关系。 2.按照边界条件的不同,弹性力学问题分为那几类边界问题试作简要说明。 答:按照边界条件的不同,弹性力学问题分为位移边界问题、应力边界问题和
混合边界问题。 位移边界问题是指物体在全部边界上的位移分量是已知的,也就是位移的边界值是边界上坐标的已知函数。 应力边界问题中,物体在全部边界上所受的面力是已知的,即面力分量在边界上所有各点都是坐标的已知函数。 混合边界问题中,物体的一部分边界具有已知位移,因而具有位移边界条件;另一部分边界则具有应力边界条件。 3.弹性体任意一点的应力状态由几个应力分量决定试将它们写出。如何确定它们的正负号 答:弹性体任意一点的应力状态由6个应力分量决定,它们是:x 、y 、z 、xy 、yz 、、zx 。正面上的应力以沿坐标轴正方向为正,沿坐标轴负方向为负。负面上的应力以沿坐标轴负方向为正,沿坐标轴正方向为负。 4.在推导弹性力学基本方程时,采用了那些基本假定什么是“理想弹性体”试举例说明。 答:答:在推导弹性力学基本方程时,采用了以下基本假定: (1)假定物体是连续的。 (2)假定物体是完全弹性的。 (3)假定物体是均匀的。 (4)假定物体是各向同性的。 (5)假定位移和变形是微小的。 符合(1)~(4)条假定的物体称为“理想弹性体”。一般混凝土构件、一般土质地基可近似视为“理想弹性体”。 5.什么叫平面应力问题什么叫平面应变问题各举一个工程中的实例。 答:平面应力问题是指很薄的等厚度薄板只在板边上受有平行于板面并且不沿厚度变化的 面力,同时体力也平行于板面并且不沿厚度变化。如工程中的深梁以及平板坝的平板 支墩就属于此类。 平面应变问题是指很长的柱型体,它的横截面在柱面上受有平行于横截面而且不沿长 度变化的面力,同时体力也平行于横截面而且也不沿长度变化,即内在因素和外来作 用都不沿长度而变化。 6.在弹性力学里分析问题,要从几方面考虑各方面反映的是那些变量间的关系 答:在弹性力学利分析问题,要从3方面来考虑:静力学方面、几何学方面、物理学方面。 平面问题的静力学方面主要考虑的是应力分量和体力分量之间的关系也就是平面问 题的平衡微分方程。平面问题的几何学方面主要考虑的是形变分量与位移分量之间的 关系,也就是平面问题中的几何方程。平面问题的物理学方面主要反映的是形变分量与应力分量之 间的关系,也就是平面问题中的物理方程。 7.按照边界条件的不同,弹性力学平面问题分为那几类试作简要说明 答:按照边界条件的不同,弹性力学平面问题可分为两类: (1)平面应力问题 : 很薄的等厚度板,只在板边上受有平行于板面并且不沿厚度变化的面力。这一类问题可以简化为平面应力问题。例如深梁在横向力作用下的受力分析问题。在该种问题中只存在 yx xy y x ττσσ=、、三个应力分量。 (2)平面应变问题 : 很长的柱形体,在柱面上受有平行于横截面并且不沿长度变化的面力,而且体力
1-1. 选择题 a. 下列材料中,D属于各向同性材料。 A. 竹材; B. 纤维增强复合材料; C. 玻璃钢; D. 沥青。 b. 关于弹性力学的正确认识是A。 A. 计算力学在工程结构设计的中作用日益重要; B. 弹性力学从微分单元体入手分析弹性体,因此与材料力学不同,不需要对问题作假设; C. 任何弹性变形材料都是弹性力学的研究对象; D. 弹性力学理论像材料力学一样,可以没有困难的应用于工程结构分析。 c. 弹性力学与材料力学的主要不同之处在于B。 A. 任务; B. 研究对象; C. 研究方法; D. 基本假设。 d. 所谓“完全弹性体”是指B。 A. 材料应力应变关系满足胡克定律; B. 材料的应力应变关系与加载时间历史无关; C. 本构关系为非线性弹性关系; D. 应力应变关系满足线性弹性关系。 2-1. 选择题 a. 所谓“应力状态”是指B。 A. 斜截面应力矢量与横截面应力矢量不同; B. 一点不同截面的应力随着截面方位变化而改变; C. 3个主应力作用平面相互垂直; D. 不同截面的应力不同,因此应力矢量是不可确定的。 2-2. 梯形横截面墙体完全置于水中,如图所示。已知水的比重为 ,试写出墙体横截面边界AA',AB,BB’的面力边界条件。 2-3. 作用均匀分布载荷q的矩形横截面简支梁,如图所示。根据材料力学分析结果,该梁 横截面的应力分量为 试检验上述分析结果是否满足平衡微分方程和面力边界条件。
2-4. 单位厚度的楔形体,材料比重为γ,楔形体左侧作用比重为γ1的液体,如图所示。试写出楔形体的边界条件。 2-5. 已知球体的半径为r,材料的密度为ρ1,球体在密度为ρ1(ρ1>ρ1)的液体中漂浮,如图所示。试写出球体的面力边界条件。
弹性力学与有限元分析复习题及其答案 一、填空题 1、弹性力学研究弹性体由于受外力作用、边界约束或温度改变等原因而发生的应力、形变和位移。 2、在弹性力学中规定,线应变以伸长时为正,缩短时为负,与正应力的正负号规定相适应。 3、在弹性力学中规定,切应变以直角变小时为正,变大时为负,与切应力的正负号规定相适应。 4、物体受外力以后,其内部将发生内力,它的集度称为应力。与物体的形变和材料强度直接有关的,是应力在其作用截面的法线方向和切线方向的分量,也就是正应力和切应力。应力及其分量的量纲是L -1MT -2。 5、弹性力学的基本假定为连续性、完全弹性、均匀性、各向同性。 6、平面问题分为平面应力问题和平面应变问题。 7、已知一点处的应力分量100=x σMPa ,50=y σMPa ,5010=xy τ MPa ,则主应力=1σ150MPa ,=2σ0MPa ,=1α6135'ο。 8、已知一点处的应力分量, 200=x σMPa ,0=y σMPa ,400-=xy τ MPa ,则主应力=1σ512 MPa ,=2σ-312 MPa ,=1α-37°57′。 9、已知一点处的应力分量,2000-=x σMPa ,1000=y σMPa ,400-=xy τ MPa ,则主应力=1σ1052 MPa ,=2σ-2052 MPa ,=1α-82°32′。 10、在弹性力学里分析问题,要考虑静力学、几何学和物理学三方面条件,分别建立三套方程。 11、表示应力分量与体力分量之间关系的方程为平衡微分方程。 12、边界条件表示边界上位移与约束,或应力与面力之间的关系式。分为位移边界条件、应力边界条件和混合边界条件。 13、按应力求解平面问题时常采用逆解法和半逆解法。 14、有限单元法首先将连续体变换成为离散化结构,然后再用结构力学位移法进行求解。其具体步骤分为单元分析和整体分析两部分。 15、每个单元的位移一般总是包含着两部分:一部分是由本单元的形变引起的,另一部分是由于其他单元发生了形变而连带引起的。 16、每个单元的应变一般总是包含着两部分:一部分是与该单元中各点的位置坐标有关的,是各点不相同的,即所谓变量应变;另一部分是与位置坐标无关的,是各点相同的,即所谓常量应变。 17、为了能从有限单元法得出正确的解答,位移模式必须能反映单元的刚体位移和常量应变,还应当尽可能反映相邻单元的位移连续性。 18、为了使得单元内部的位移保持连续,必须把位移模式取为坐标的单值连续函数,为了使得相邻单元的位移保持连续,就不仅要使它们在公共结点处具有相同的位移时,也能在整个公共边界上具有相同的位移。 19、在有限单元法中,单元的形函数N i 在i 结点N i =1;在其他结点N i =0及∑N i =1。 20、为了提高有限单元法分析的精度,一般可以采用两种方法:一是将单元的尺寸减小,以便较好地反映位移和应力变化情况;二是采用包含更高次项的位移模式,使位移和应力的精度提高。
弹性力学教材习题及解 答 HUA system office room 【HUA16H-TTMS2A-HUAS8Q8-HUAH1688】
1-1. 选择题 a. 下列材料中,D属于各向同性材料。 A. 竹材; B. 纤维增强复合材料; C. 玻璃 钢; D. 沥青。 b. 关于弹性力学的正确认识是A。 A. 计算力学在工程结构设计的中作用日益重要; B. 弹性力学从微分单元体入手分析弹性体,因此与材料力学不同,不需要对问题作假设; C. 任何弹性变形材料都是弹性力学的研究对象; D. 弹性力学理论像材料力学一样,可以没 有困难的应用于工程结构分析。 c. 弹性力学与材料力学的主要不同之处在于B。 A. 任务; B. 研究对象; C. 研究方法; D. 基本假设。 d. 所谓“完全弹性体”是指B。 A. 材料应力应变关系满足胡克定律; B. 材料的应力 应变关系与加载时间历史无关; C. 本构关系为非线性弹性关系; D. 应力应变关系满足 线性弹性关系。 2-1. 选择题 a.所谓“应力状态”是指B。 A. 斜截面应力矢量与横截面应力矢量不同; B. 一点不 同截面的应力随着截面方位变化而改变; C. 3个主应力作用平面相互垂直; D. 不同截 面的应力不同,因此应力矢量是不可确定的。 2-2. 梯形横截面墙体完全置于水中,如图所示。已知水的比重为,试写出墙体横截面边
界AA',AB,BB’的面力边界条件。 2-3. 作用均匀分布载荷q的矩形横截面简支梁,如图所示。根据材料力学分析结果,该梁横截面的应力分量为 试检验上述分析结果是否满足平衡微分方程和面力边界条件。 2-4. 单位厚度的楔形体,材料比重为,楔形体左侧作用比重为的液体,如图所示。试写出楔形体的边界条件。 2-5. 已知球体的半径为r,材料的密度为1,球体在密度为1(1>1)的液体中漂浮,如
题提示和答案 《弹性力学简明教程》 习题提示和参考答案 第二章习题的提示与答案 2-1 是 2-2 是 2-3 按习题2-1分析。 2-4 按习题2-2分析。 2-5 在的条件中,将出现2、3阶微量。当略去3阶微量后,得出的切 应力互等定理完全相同。 2-6 同上题。在平面问题中,考虑到3阶微量的精度时,所得出的平衡微分方程都相同。其区别只是在3阶微量(即更高阶微量)上,可以略去不计。 2-7 应用的基本假定是:平衡微分方程和几何方程─连续性和小变形,物理方程─理想弹性体。 2-8 在大边界上,应分别列出两个精确的边界条件;在小边界(即次要边界)上,按照圣维南原理可列出3个积分的近似边界条件来代替。 2-9 在小边界OA边上,对于图2-15(a)、(b)问题的三个积分边界条件相同,因此,这两个问题为静力等效。 2-10 参见本章小结。 2-11 参见本章小结。 2-12 参见本章小结。 2-13 注意按应力求解时,在单连体中应力分量必须满足 (1)平衡微分方程, (2)相容方程, (3)应力边界条件(假设)。 2-14 见教科书。 2-15 见教科书。 2-16 见教科书。 2-17 取
它们均满足平衡微分方程,相容方程及x=0和的应力边界条件,因此,它们是该问题的正确解答。 2-18 见教科书。 2-19 提示:求出任一点的位移分量和,及转动量,再令,便可得 出。 第三章习题的提示与答案 3-1 本题属于逆解法,已经给出了应力函数,可按逆解法步骤求解: (1)校核相容条件是否满足, (2)求应力, (3)推求出每一边上的面力从而得出这个应力函数所能解决的问题。 3-2 用逆解法求解。由于本题中 l>>h, x=0,l 属于次要边界(小边界),可将小边界上的面力化为主矢量和主矩表示。 3-3 见3-1例题。 3-4 本题也属于逆解法的问题。首先校核是否满足相容方程。再由求出 应力后,并求对应的面力。本题的应力解答如习题3-10所示。应力对应的面力是:主要边界: 所以在边界上无剪切面力作用。下边界无法向面力;上边 界有向下的法向面力q。 次要边界: x=0面上无剪切面力作用;但其主矢量和主矩在 x=0 面上均为零。 因此,本题可解决如习题3-10所示的问题。 3-5 按半逆解法步骤求解。 (1)可假设 (2)可推出 (3)代入相容方程可解出f、,得到
一、填空题 1.弹性力学的基本假设为均匀性、各向同性、 连续性 、 完全弹性 和 小变形 。 2.弹性力学正面是指 外法线方向与坐标轴正向一致 的面,负面指 外法线方向与坐标轴负向一致 的面。 3.弹性力学的应力边界条件表示在边界上 应力 与 面力 之间的关系式。除应力边界条件外弹性力学中还有 位移 、 混合 边界条件。 4.在平面应力问题与平面应变问题中,除 物理 方程不同外,其它基本方程和边界条件都相同。因此,若已知平面应力问题的解答,只需将其弹性模量E 换为 ()21E -μ,泊松比μ换为()1μ-μ,即可得到平面应变问题的解答。 5.平面应力问题的几何形状特征是 一个方向上的尺寸远小于另外两个方向上的尺寸;平面应变问题的几何形状特征是 一个方向上的尺寸远大于另外两个方向上的尺寸。 二、单项选择题 1. 下列关于弹性力学问题中的正负号规定,正确的是 D 。 (A) 应力分量是以沿坐标轴正方向为正,负方向为负 (B) 体力分量是以正面正向为正,负面负向为正 (C) 面力分量是以正面正向为正,负面负向为负 (D) 位移分量是以沿坐标轴正方向为正,负方向为负 2. 弹性力学平面应力问题中应力分量表达正确的是 A 。 (A) 0z σ= (B) [()]/z z x y E σεμεε=-+ (C) ()z x y σμσσ=+ (D) z z f σ= 3. 弹性力学中不属于基本方程的是 A 。 (A) 相容方程 (B) 平衡方程 (C) 几何方程 (D) 物理方程 4. 弹性力学平面问题中一点处的应力状态由 A 个应力分量决定。 (A) 3 (B) 2 (C) 4 (D) 5
塑性力学中本构关系的讨论 摘要:本构方程是塑性力学解决问题不同于弹性力学的一大不同点,本文从主要描述塑性变形问题的两个本构理论出发,借鉴现有理论和实验结果,对比增量理论和全量理论的优缺及各自在工程中的适用性。 关键词:塑性力学;增量理论;全量理论;有限元法 引言 塑性力学和弹性力学之间的根本差别在于弹性力学是以应力与应变成线性关系的广义胡克定律为基础的。而塑性力学研究范畴中,应力与应变一般成非线性关系,而这种非线性的特征又不能一概而论,对于不同的材料,在不同的条件下,都具有不同的规律。塑性变形的基本规律是建立在实验的基础上,根据实验结果简化抽象出塑性状态下应力与应变关系的特征。 与弹性力学比较,主要影响塑性力学本构方程的有以下几点: 应力与应变之间的关系是非线性的,其比例系数不仅与材料有关而且与塑性应变有关; 由于塑性变形的出现,弹塑性材料在卸载时,体元的应力-应变状态不能沿原来的加载路径返回,应力与应变之间不再存在一一对应的关系,而与加载历史有关; 变形体中可分为弹性区和塑性区,在弹性区,加载与卸载都服从广义胡克定律,在塑性区,加载过程服从塑性规律而卸载过程服从广义胡克定律。 因此在塑性力学发展初期,最初提出的是以增量方法来讨论应力增量与应变增量之间的关系,它不受加载条件的限制,但在实际计算过程中,需要按加载过程中的变形路径进行积分,计算比较复杂。Hencky于1924年提出的全量理论在实践中使用方便很多,但全量本构关系仅能应用于特定情况,及体元应力-应变过程为单调过程,不能描述弹塑性变形规律全貌。 1.增量理论 塑性应力应变关系的重要特点是非线性和非简单对应,非线性及应力与应变关系不是线性关系,非简单对应及应变不能由应力唯一确定。在材料变形的塑性阶段,
第三章弹性理论 姓名班级学号考试时间:20分钟 一、单项选择题 1、点弹性和弧弹性之间()关系 A、有 B、没有 C、不确定 2、冰棒的需求价格弹性()药品的需求价格弹性 A、大于 B、小于 C、等于 D、大于或等于 3、供给弹性()点弹性和弧弹性的区分 A、有 B、没有 C、不确定 4、垂直的需求曲线是()弹性 A、完全有 B、富有 C、完全无 5、水平的供给曲线是()弹性 A、完全有 B、富有 C、完全无 6、一种商品价格下降,另外一种商品需求上升,则两种商品之间是()关系 A、互补品 B、替代品 C、正常品 D、劣品 7、在长期中,供给曲线更()弹性 A、缺乏 B、富有 C、不确定 D、依商品而定 8、容易被替代的商品,其需求弹性() A、大 B、小 C、不确定 二、多项选择题 1、弹性一般分为()弹性 A、供给 B、需求 C、价格 D、收入 2、利用价格需求弹性可以区分出() A、生活必须品 B、奢侈品 C、经济商品 D、免费物品 三、简答题 1、影响商品需求价格弹性的因素? 2、需求价格弹性的五种情况?
答案 一.单项选择题 1.A 2. A 3.A 4.C 5.A 6.A 7.B 8.A 二.多项选择题 1.ABCD 2.AB 三.简答题 1. 影响商品需求价格弹性的因素? (1). 必需品与奢侈品 一般地说,奢侈品需求对价格是有弹性的,而必需品则是缺乏弹性的。 (2). 相近替代品的可获得性 一般来说,相近替代品越多的商品越富有弹性。替代品多,消费者从这种商品转向购买其他商品较为容易,对商品价格更敏感(如,香烟)。 (3). 商品所划定范畴的大小 一般来说,如果某产品存在着很接近的替代品的数量愈多,其需求价格弹性愈大。(4). 时间的长短 计算某种商品价格弹性系数所考虑的时间愈长,其系数会愈大。当某一商品价格上升时,消费者需要一段时间去寻找可以接受的替代品,因此,短期内对该商品的需求量变化不大,而长期内消费者更可能转向其他替代品,因此,该提价商品的需求量变化会更加明显些。 2. 需求价格弹性的五种情况? (1). 当e=0时,需求对价格是完全无弹性的,即需求量与价格无关。则需求曲线为一条垂直于x轴的直线。如,垄断价格;婚丧用品,特效药等接近于完全无弹性。 (2). 当e=1时,需求对价格为单位弹性,即价格变化的百分比与需求量变化的百分比相等。 (3). 当e=∞时,需求对价格是完全有弹性,即需求曲线为一条垂直于P轴的直线。如,银行以某一固定的价格收购黄金;实行保护价的农产品。 (4). 当e>1时,需求对价格富有弹性,即需求变化的幅度大于价格变化的幅度。如,奢侈品。 (5). 当e<1时,需求队价格缺乏弹性,即需求变化的幅度小于价格变化的幅度。如,生活必需品。
弹塑性本构关系的认识及其在钢筋 混凝土结构中的应用浅谈 摘要:本文首先对弹塑性本构关系和钢筋混凝土材料的本构模型作了简要概述,然后结合上课所学知识和自己阅读的几篇文章,从材料的屈服准则、流动准则、硬化准则和加载卸载准则等四个方面详细阐述了弹塑性本构关系。最后,结合上述准则简要论述了混凝土这一常用材料在地震作用下的弹塑性本构关系。 关键词:弹塑性本构关系,钢筋混凝土,地震 Understanding of Elastoplastic Constitutive Relation and a Brife Talk of Its Aapplication to Reinforced Concrete Structure Abstract:This paper firstly makes a brief overview about elastoplastic constitutive relation and reinforced concrete constitutive model. Then,elaborating the elastoplastic constitutive relation from the four aspects of material yield criterion,flow rule,hardening rule,loading and unloading criterion based on what I have learned in class and reading from a few articles. Lastly,a simply introduction on the elastoplastic constitutive of reinforced concrete under earthquake is demonstrated. Keywords:elastoplastic constitutive relation; reinforced concrete structure; earthquake 1 引言 钢筋混凝土结构材料的本构关系对钢筋混凝土结构有限元分析结果有重大的影响,如果选用的本构关系不能很好地反映材料的各项力学性能,那么其它计算再精确也无法反映结构的实际受力特征。所谓材料的本构关系,主要是指描述材料力学性质的数学表达式。用什么样的表达式来描述材料受力后的变化规律呢?不同的学者根据材料的性质、受力条件和大小、试验方法以及不同的理论模型等因素综合考虑,建立了许多种钢筋混凝土材料的本构关系表达式。 材料的本构关系所基于的理论模型主要有:弹性理论、非线性弹性理论、弹塑性理论、粘弹性理论、粘弹塑性理论、断裂力学理论、损伤力学理论、内时理论等。迄今为止,由于钢筋混凝土材料的复杂因素,还没有一种理论模型被公认为可以完全描述钢筋混凝土材料的
弹性力学练习--答案
一、填空题 1. 等截面直杆扭转问题中, 2D dxdy M φ=??的物理意义是 : 杆端截面上剪应力 对转轴的矩等于杆截面内的扭矩M 。 5.弹性力学的基本假定为:连续性、完全弹性、均匀性、各向同性、小变形性。 6. 一组可能的应力分量应满足: 平衡微分方程 、相容方程(变形协调条件) 。 7. 最小势能原理等价于弹性力学基本方程中:平衡微分方程 、应力边界条件 。 13.弹性力学平衡微分方程、几何方程的张量表示为: ,0ij j i X σ+=,,,1 ()2ij i j j i u u ε= +
17. 有限单元法首先将连续体变换成为离散化结构,然后再用结构力学位移法进行求解。其具体步骤分为单元分析和整体分析两部分。 18. 为了使得单元内部的位移保持连续,必须把位移模式取为坐标的单值连续函数,为了使得相邻单元的位移保持连续,就不仅要使它们在公共结点处具有相同的位移时,也能在整个公共边界上具有相同的位移。 19. 每个单元的位移一般总是包含着两部分:一部分是由本单元的形变引起的,另一部分是由于其他单元发生了形变而连带引起的。 20. 为了提高有限单元法分析的精度,一般可以采用两种方法:一是将单元的尺寸减小,以便较好地反映位移和应力变化情况;二是采用包含更高次项的位移模式,使位移和应力的精度提高。 二、判断题 1、连续性假定是指整个物体的体积都被组成这个物体的介质所填满,不留下任何空隙。(√) 2、均匀性假定是指整个物体的体积都被组成这个物体的介质所填满,不留下任何空隙。(×) 3、表示位移分量与应力分量之间关系的方程为物理方程。(×) 4、当物体的位移分量完全确定时,形变分量即完全确定。(√) 5、连续性假定是指整个物体是由同一材料组成的。(×) 6、平面应力问题与平面应变问题的物理方程是完全相同的。(×) 7、按应力求解平面问题,最后可以归纳为求解一个应力函数。(×) 8、在有限单元法中,结点力是指单元对结点的作用力。(×) 9、在有限单元法中,结点力是指结点对单元的作用力。(√) 10、当物体的形变分量完全确定时,位移分量却不能完全确定。(√) 11、在平面三结点三角形单元的公共边界上应变和应力均有突变。(√ ) 12、按应力求解平面问题时常采用位移法和应力法。(×) 13、表示应力分量与面力分量之间关系的方程为平衡微分方程。(×) 三、问答题 1.试简述力学中的圣维南原理,并说明它在弹性力学分析中的作用。
第二章平面问题的基本理论 2-5在下图的微分体中,若将对形心的力矩平衡条件=0,改为对角点的力矩平衡条件,试问将导出什么形式的方程? 解:将对形心的力矩平衡条件=0,改为对角点的力矩平衡条件=0,列出力矩的平衡方程=0:。 。 将上式除以,合并相同的项,得到 。 省略去微小量不记(即,为0),得出 可以看出此关系式和对形心的力矩平衡条件=0解出的结果一样。 2-6在下图的微分体中,若考虑每一面上的应力分量不是均匀分布的,试问将导出什么形式的平衡微分方程。
解:每个面上的应力分量不是均匀分布的,假设应力分量沿线性分布,如上图所示,为了 计算方便,单元体在Z方向的长度取一个单位。 各点的正应力为: 各点的切应力为: , , , , , , , , 由微分单元体的平衡条件=0,=0得 , 。 将各个点的应力分量带入上式,化简,并约去dxdy,就得到平面问题中的平衡微分方程 2-8试列出图2-13,图2-14所示问题的全部边界条件。在其端部边界上,应用圣维南原理列出三个积分的应力边界条件。
图2-13 图2-14 解: 对于图2-13中,在主要边界x=0,x=b上,应满足下列的边界条件: 在次要边界y=0上,能满足下列边界条件: 在次要边界y=上,有位移边界条件:这两个边界位移条件用圣维南原理的三个积分的应力边界条件代替,设板厚为1个单位, 对于图2-15中,在主要边界y=上,应满足下列边界条件: 在次要边界上x=0,列出三个积分的应力边界条件: 在次要边界x=l上,有位移边界条件:这两个位移边界条件可以改用三个积分边界条件来代替。 2-13检验下列应力分量是否是图示问题的解答: 图2-16 图2-17 解:按应力求解时,在单元体中应力分量必须满足:平衡微分方程、相容方程、应力边界 条件(本题不计体力)。 (a)图2-16,
《弹性力学》试题参考答案(答题时间:100分钟) 一、填空题(每小题4分) 1.最小势能原理等价于弹性力学基本方程中: 平衡微分方程 , 应力边界条件 。 2.一组可能的应力分量应满足: 平衡微分方程 ,相容方程(变形协调条件) 。 3.等截面直杆扭转问题中, M dxdy D =?? 2?的物理意义是 杆端截面上剪应力对转轴的矩等 于杆截面内的扭矩M 。 4.平面问题的应力函数解法中,Airy 应力函数?在边界上值的物理意义为 边界上某一点(基准点)到任一点外力的矩 。 5.弹性力学平衡微分方程、几何方程的张量表示为: 0,=+i j ij X σ ,)(2 1,,i j j i ij u u +=ε。 二、简述题(每小题6分) 1.试简述力学中的圣维南原理,并说明它在弹性力学分析中的作用。 圣维南原理:如果物体的一小部分边界上的面力变换为分布不同但静力等效的面力(主矢与主矩相同),则近处的应力分布将有显著的改变,但远处的应力所受影响可以忽略不计。 作用:(1)将次要边界上复杂的面力(集中力、集中力偶等)作分布的面力代替。 (2)将次要的位移边界条件转化为应力边界条件处理。 2.图示两楔形体,试分别用直角坐标和极坐标写出其应力函数?的分离变量形式。 题二(2)图 (a )???=++= )(),(),(222θθ??f r r cy bxy ax y x (b )? ??=+++= )(),(),(3 3223θθ??f r r dy cxy y bx ax y x 3.图示矩形弹性薄板,沿对角线方向作用一对拉力P ,板的几何尺寸如图,材料的弹性模量E 、泊松比 已知。试求薄板面积的改变量S ?。
弹性力学课后答案第二章习题的提示与答案 2-1 是 2-2 是 2-3 按习题2-1分析。 2-4 按习题2-2分析。 2-5 在的条件中,将出现2、3阶微量。当略去3阶微量后,得出的切应力互等定理完全相同。 2-6 同上题。在平面问题中,考虑到3阶微量的精度时,所得出的平衡微分方程都相同。其区别只是在3阶微量(即更高阶微量)上,可以略去不计。 2-7 应用的基本假定是:平衡微分方程和几何方程─连续性和小变形,物理方程─理想弹性体。 2-8 在大边界上,应分别列出两个精确的边界条件;在小边界(即次要边界)上,按照圣维南原理可列出3个积分的近似边界条件来代替。 2-9 在小边界OA边上,对于图2-15(a)、(b)问题的三个积分边界条件相同,因此,这两个问题为静力等效。 2-10 参见本章小结。 2-11 参见本章小结。 2-12 参见本章小结。 2-13 注意按应力求解时,在单连体中应力分量必须满足 (1)平衡微分方程,
(2)相容方程, (3)应力边界条件(假设 )。 2-14 见教科书。 2-15 2-16 见教科书。见教科书。 2-17 取 它们均满足平衡微分方程,相容方程及x=0和的应力边界条件,因此,它们是该问题的正确解答。 2-18 见教科书。 2-19 提示:求出任一点的位移分量和,及转动量,再令 ,便可得出。 第三章习题的提示与答案 3-1 本题属于逆解法,已经给出了应力函数,可按逆解法步骤求解: (1)校核相容条件是否满足, (2)求应力, (3)推求出每一边上的面力从而得出这个应力函数所能解决的问题。 3-2 用逆解法求解。由于本题中 l>>h, x=0,l 属于次要边界(小边界),可将小边界上的面力化为主矢量和主矩表示。 3-3 见3-1例题。 3-4 本题也属于逆解法的问题。首先校核是否满足相容方程。再由求出应力后,并求对应的面力。本题的应力解答如习题3-10所
1-1. 选择题 a. 下列材料中,???D属于各向同性材料。 ??? A. 竹材; ??? B. 纤维增强复合材料; ??? C. 玻璃钢; ??? D. 沥青。 b. 关于弹性力学的正确认识是???A。 ??? A. 计算力学在工程结构设计的中作用日益重要; ??? B. 弹性力学从微分单元体入手分析弹性体,因此与材料力学不同,不需要对问题作假设;??? C. 任何弹性变形材料都是弹性力学的研究对象; ??? D. 弹性力学理论像材料力学一样,可以没有困难的应用于工程结构分析。 c. 弹性力学与材料力学的主要不同之处在于???B。 ??? A. 任务; ??? B. 研究对象; ??? C. 研究方法; ??? D. 基本假设。 d. 所谓“完全弹性体”是指???B。 ??? A. 材料应力应变关系满足胡克定律; ??? B. 材料的应力应变关系与加载时间历史无关; ??? C. 本构关系为非线性弹性关系; ??? D. 应力应变关系满足线性弹性关系。 2-1. 选择题 a.?所谓“应力状态”是指???B。 ??? A. 斜截面应力矢量与横截面应力矢量不同; ??? B. 一点不同截面的应力随着截面方位变化而改变; ??? C. 3个主应力作用平面相互垂直; ??? D. 不同截面的应力不同,因此应力矢量是不可确定的。 2-2.? 梯形横截面墙体完全置于水中,如图所示。已知水的比重为 ,试写出墙体横截面边界AA',AB,BB’的面力边界条件。 2-3. 作用均匀分布载荷q的矩形横截面简支梁,如图所示。根据材料力学分析结果,该梁 横截面的应力分量为 试检验上述分析结果是否满足平衡微分方程和面力边界条件。
《弹性力学简明教程》 习题提示和参考答案 第二章 习题的提示与答案 2-1 是 2-2 是 2-3 按习题2-1分析。 2-4 按习题2-2分析。 2-5 在的条件中,将出现2、3阶微量。当略去3阶微量后,得出的切应力互等 定理完全相同。 2-6 同上题。在平面问题中,考虑到3阶微量的精度时,所得出的平衡微分方程都相同。其区别只是在3阶微量(即更高阶微量)上,可以略去不计。 2-7 应用的基本假定是:平衡微分方程和几何方程─连续性和小变形,物理方程─理想弹性体。 2-8 在大边界上,应分别列出两个精确的边界条件;在小边界(即次要边界)上,按照圣维南原理可列出3个积分的近似边界条件来代替。 2-9 在小边界OA边上,对于图2-15(a)、(b)问题的三个积分边界条件相同,因此,这两个问题为静力等效。 2-10 参见本章小结。 2-11 参见本章小结。 2-12 参见本章小结。 2-13 注意按应力求解时,在单连体中应力分量必须满足 (1)平衡微分方程, (2)相容方程, (3)应力边界条件(假设)。 2-14 见教科书。 2-15 见教科书。 2-16 见教科书。 2-17 取 它们均满足平衡微分方程,相容方程及x=0和的应力边界条件,因此,它们是该问题的正确解答。 2-18 见教科书。 2-19 提示:求出任一点的位移分量和,及转动量,再令,便可得出。 第三章 习题的提示与答案 3-1 本题属于逆解法,已经给出了应力函数,可按逆解法步骤求解: (1)校核相容条件是否满足, (2)求应力, (3)推求出每一边上的面力从而得出这个应力函数所能解决的问题。 3-2 用逆解法求解。由于本题中 l>>h, x=0,l 属于次要边界(小边界),可将小边
岩土类材料的弹塑性力学模型及本构方程 摘要:本文主要结合岩土类材料的特性,开展研究其在受力变形过程中的弹性及塑性变形的特点,描述简化的力学模型特征及对应的适用条件,同时在分析研究其弹塑性力学模型的基础上,探究了关于岩土类介质材料的各种本构模型,如M-C、D-P、Cam、D-C、L-D及节理材料模型等,分析对应使用条件,特点及公式,从而推广到不同的材料本构模型的研究,为弹塑性理论更好的延伸发展做一定的参考性。 关键词:岩土类材料,弹塑性力学模型,本构方程 不同的固体材料,力学性质各不相同。即便是同一种固体材料,在不同的物理环境和受力状态中,所测得的反映其力学性质的应力应变曲线也各不相同。尽管材料力学性质复杂多变,但仍是有规律可循的,也就是说可将各种反映材料力学性质的应力应变曲线,进行分析归类并加以总结,从而提出相应的变形体力学模型。 第一章岩土类材料 地质工程或采掘工程中的岩土、煤炭、土壤,结构工程中的混凝土、石料,以及工业陶瓷等,将这些材料统称为岩土材料。 岩土塑性力学与传统塑性力学的区别在于岩土类材料和金属材料具有不同的力学特性。岩土类材料是颗粒组成的多相体,而金属材料是人工形成的晶体材料。正是由于不同的材料特性决定了岩土类材料和金属材料的不同性质。归纳起来,岩土材料有3点基本特性:1.摩擦特性。2.多相特性。3.双强度特性。另外岩土还有其特殊的力学性质:1.岩土的压硬性,2.岩土材料的等压屈服特性与剪胀性,3.岩土材料的硬化与软化特性。4.土体的塑性变形依赖于应力路径。 对于岩土类等固体材料往往在受力变形的过程中,产生的弹性及塑性变形具备相应的特点,物体本身的结构以及所加外力的荷载、环境和温度等因素作用,常使得固体物体在变形过程中具备如下的特点。 固体材料弹性变形具有以下特点:(1)弹性变形是可逆的。物体在变形过程中,外力所做的功以能量(应变能)的形式贮存在物体内,当卸载时,弹性应变能将全部释放出来,物体的变形得以完全恢复; (2)无论材料是处于单向应力状态,还是复杂应力状态,在线弹性变形阶段,应力和应变成线性比例关系;(3)对材料加载或卸载,其应力应变曲线路径相同。因此,应力与应变是一一对应的关系。 固体材料的塑性变形具有以下特点: (l)塑性变形不可恢复,所以外力功不可逆。塑性变形的产生过程,必定要消耗能量(称耗散能或形变功); (2)在塑性变形阶段,应力和应变关系是非线性的。因此,不能应用叠加原理。又因为加载与卸载的规律不同,应力与应变也不再存在一一对应的关系,也即应力与相应的应变不能唯一地确定,而应当考虑到加载的路径(即加载历史); (3)当受力固体产生塑性变形时,将同时存在有产生弹性变形的弹性区域和产生塑性变形的塑性区域。并且随着载荷的变化,两区域的分界面也会产生变化。
2012年度弹性力学与有限元分析复习题及其答案 一、填空题 1、弹性力学研究弹性体由于受外力作用、边界约束或温度改变等原因而发生的应力、形变和位移。 2、在弹性力学中规定,线应变以伸长时为正,缩短时为负,与正应力的正负号规定相适应。 3、在弹性力学中规定,切应变以直角变小时为正,变大时为负,与切应力的正负号规定相适应。 4、物体受外力以后,其部将发生力,它的集度称为应力。与物体的形变和材料强度直接有关的,是应力在其作用截面的法线方向和切线方向的分量,也就是正应力和切应力。应力及其分量的量纲是L -1MT -2。 5、弹性力学的基本假定为连续性、完全弹性、均匀性、各向同性。 6、平面问题分为平面应力问题和平面应变问题。 10、在弹性力学里分析问题,要考虑静力学、几何学和物理学三方面条件,分别建立三套方程。 11、表示应力分量与体力分量之间关系的方程为平衡微分方程。 12、边界条件表示边界上位移与约束,或应力与面力之间的关系式。分为位移边界条件、应力边界条件和混合边界条件。 13、按应力求解平面问题时常采用逆解法和半逆解法。 2、平面问题分为 和 。 平面应力问题 平面应变问题 6、在弹性力学中规定,切应变以 时为正, 时为负,与 的正负号规定相适应。 直角变小 变大 切应力 7、小孔口应力集中现象中有两个特点:一是 ,即孔附近的应力远大于远处的应力,或远大于无孔时的应力。二是 ,由于孔口存在而引起的应力扰动围主要集中在距孔边1.5倍孔口尺寸的围。 孔附近的应力高度集中 , 应力集中的局部性 四、分析计算题 1、试写出无体力情况下平面问题的应力分量存在的必要条件,并考虑下列平面问题的应力分量是否可能在弹性体中存在。 (1)By Ax x +=σ,Dy Cx y +=σ,Fy Ex xy +=τ; (2))(22y x A x +=σ,)(22y x B y +=σ,Cxy xy =τ;
一、填空题 1.等截面直杆扭转问题中, 2D dxdy M φ=??的物理意义是:杆端截面上剪应力 对转轴的矩等于杆截面内的扭矩M 。 5.弹性力学的基本假定为:连续性、完全弹性、均匀性、各向同性、小变形性。 6.一组可能的应力分量应满足:平衡微分方程、相容方程(变形协调条件)。 7.最小势能原理等价于弹性力学基本方程中:平衡微分方程、应力边界条件。 13.弹性力学平衡微分方程、几何方程的张量表示为:,0ij j i X σ+=,,,1()2ij i j j i u u ε=+
17.有限单元法首先将连续体变换成为离散化结构,然后再用结构力学位移法进行求解。其具体步骤分为单元分析和整体分析两部分。 18.为了使得单元内部的位移保持连续,必须把位移模式取为坐标的单值连续函数,为了使得相邻单元的位移保持连续,就不仅要使它们在公共结点处具有相同的位移时,也能在整个公共边界上具有相同的位移。 19.每个单元的位移一般总是包含着两部分:一部分是由本单元的形变引起的,另一部分是由于其他单元发生了形变而连带引起的。 20.为了提高有限单元法分析的精度,一般可以采用两种方法:一是将单元的尺寸减小,以便较好地反映位移和应力变化情况;二是采用包含更高次项的位移模式,使位移和应力的精度提高。 二、判断题 1、连续性假定是指整个物体的体积都被组成这个物体的介质所填满,不留下任何空隙。(√) 2、均匀性假定是指整个物体的体积都被组成这个物体的介质所填满,不留下任何空隙。(×) 3、表示位移分量与应力分量之间关系的方程为物理方程。(×) 4、当物体的位移分量完全确定时,形变分量即完全确定。(√) 5、连续性假定是指整个物体是由同一材料组成的。(×) 6、平面应力问题与平面应变问题的物理方程是完全相同的。(×) 7、按应力求解平面问题,最后可以归纳为求解一个应力函数。(×) 8、在有限单元法中,结点力是指单元对结点的作用力。(×) 9、在有限单元法中,结点力是指结点对单元的作用力。(√) 10、当物体的形变分量完全确定时,位移分量却不能完全确定。(√) 11、在平面三结点三角形单元的公共边界上应变和应力均有突变。(√) 12、按应力求解平面问题时常采用位移法和应力法。(×) 13、表示应力分量与面力分量之间关系的方程为平衡微分方程。(×) 三、问答题 1.试简述力学中的圣维南原理,并说明它在弹性力学分析中的作用。
第四章 平面问题的极坐标解答 【4-8】 实心圆盘在r ρ=的周界上受有均布压力q 的作用,试导出其解答。 【解答】实心圆盘是轴对称的,可引用轴对称应力解答,教材中的式(4-11),即 2 2(12ln )2(32ln )20A B C A B C ρ?ρ? σρρσρρτ? =+++? ???=-+++?? ?? =?? (a) 首先,在圆盘的周界(r ρ=)上,有边界条件()=r q ρρσ=-,由此得 -q 2 (12ln )2A B C ρσρρ = +++= (b) 其次,在圆盘的圆心,当0ρ→时,式(a )中ρσ,?σ的第一、第二项均趋于无限大,这是不可能的。按照有限值条件(即,除了应力集中点以外,弹性体上的应力应为有限值。),当=0ρ时,必须有0A B ==。 把上述条件代入式(b )中,得 /2C q =-。 所以,得应力的解答为 -q 0ρ?ρ?σστ===。 【4-9】 半平面体表面受有均布水平力q ,试用应力函数 2(sin 2)ΦρB φC φ=+求解应力分量(图4-15)。 【解答】(1)相容条件: 将应力函数Φ代入相容方程40?Φ=,显然满足。 (2)由Φ求应力分量表达式 =-2sin 222sin 222cos 2B C B C B C ρ?ρ?σ??σ??τ??+?? =+??=--??
(3)考察边界条件:注意本题有两个?面,即2 π ?=±,分别为?±面。在?±面 上,应力符号以正面正向、负面负向为正。因此,有 2()0,??πσ=±= 得0C =; -q 2 (),ρ??πτ=±= 得2 q B =-。 将各系数代入应力分量表达式,得 sin 2sin 2cos 2q q q ρ?ρ?σ?σ?τ? ?=?? =-??=?? 【4-14】 设有内半径为r 而外半径为R 的圆筒受内压力q ,试求内半径和外半径的改 变量,并求圆筒厚度的改变量。 【解答】本题为轴对称问题,只有径向位移而无环向位移。当圆筒只受内压力q 的情况下,取应力分量表达式,教材中式(4-11),注意到B =0。 内外的应力边界条件要求 r r ()0,()0;(), ()0 R R q ρ?ρρ?ρρρρρττσσ=======-= 由表达式可见,前两个关于ρ?τ的条件是满足的,而后两个条件要求 r 2 2 2,20A C q A C R ?+=-??? ?+=??。 由上式解得 22 2 ,C () 2() 22 22 qr R qr A R -r R -r =-=。 (a) 把A ,B ,C 值代入轴对称应力状态下对应的位移分离,教材中式(4-12)。 ()()222211cos sin ,(R r )qr R u I K E ρμρμ??ρ?? =-++++??-? ? (b) sin cos 0u H I K ?ρ??=-+=。 (c) 式(c )中的ρ,?取任何值等式都成立,所以各自由项的系数为零 0H I K === 所以,轴对称问题的径向位移式(b )为 ()()222211(R r )qr R u E ρμρμρ?? =-++??-? ?,