基于CarSimRT的车辆稳定性系统控制器开发-
郭孔辉付皓丁海涛卢荡金凌鸽
(吉林大学汽车动态模拟国家重点实验室)
【摘要】为了检验所开发的车辆稳定性系统控制器控制算法与控制器硬件、外围传感器及执行器之间的性能匹配情况,利用CarSimRT技术建立了控制器硬件在环试验平台,并进行了控制器硬件在环试验。结果表明,所设计的控制器能够保证车辆随时按照驾驶员的意图行驶,有效提高了车辆在不同路面条件下的稳定性。
主题词:汽车稳定性控制器硬件在环
中图分类号:U461.6文献标识码:A文章编号:1000-3703(2008)03-0001-04
DevelopmentofControllerforVehicleStability
SystemBasedonCarSimRT
GuoKonghui,FuHao,DingHaitao,LuDang,JinLingge
(JilinUniversity,StateKeyLaboratoryofAutomobileDynamicSimulation)
【Abstract】Inordertoverifythecharacteristicmatchingbetweenthestabilitycontrolalgorithmandthecontrollerhardware,theoutersensorsandtheactuatorsofvehiclestabilitysystem,ahardware-in-the-loop(HIL)testplatformwasdevelopedbasedonCarSimRTtechnologies,andthetestswerealsoperformed.Testresultsshowedthatthecontrollerdevelopedherecaneffectivelyimprovethevehiclestabilityunderdifferentroadconditionsbyforcingthevehicletofollowthedriver’sinputatanytime.
Keywords:Vehicle,Stability,Controller,Hardware-in-the-loop
1前言
随着汽车行驶速度的逐步提高,人们对汽车行驶安全性的要求也日渐增高,车辆稳定性控制被广泛重视[1]。德国Bosch公司在汽车制动防抱死系统(ABS)和驱动防滑系统(ASR)的基础上,于1996年推出了汽车电子稳定性系统(ESP),它通过调节轮胎力控制汽车的横摆运动,使汽车具有良好的操纵性和方向稳定性[2,3]。目前,国内汽车稳定性控制的开发处于仿真及台架试验阶段[4,5],而关于稳定性系统控制器的开发与研究则相对欠缺,所以开发具有自主产权的汽车稳定性控制器具有重要的现实意义。本文开发了稳定性系统控制器的硬件电路和控制算法,并利用CarSimRT技术建立了控制器硬件在环平台,进行了控制器的硬件在环试验研究。
2控制器硬件在环平台
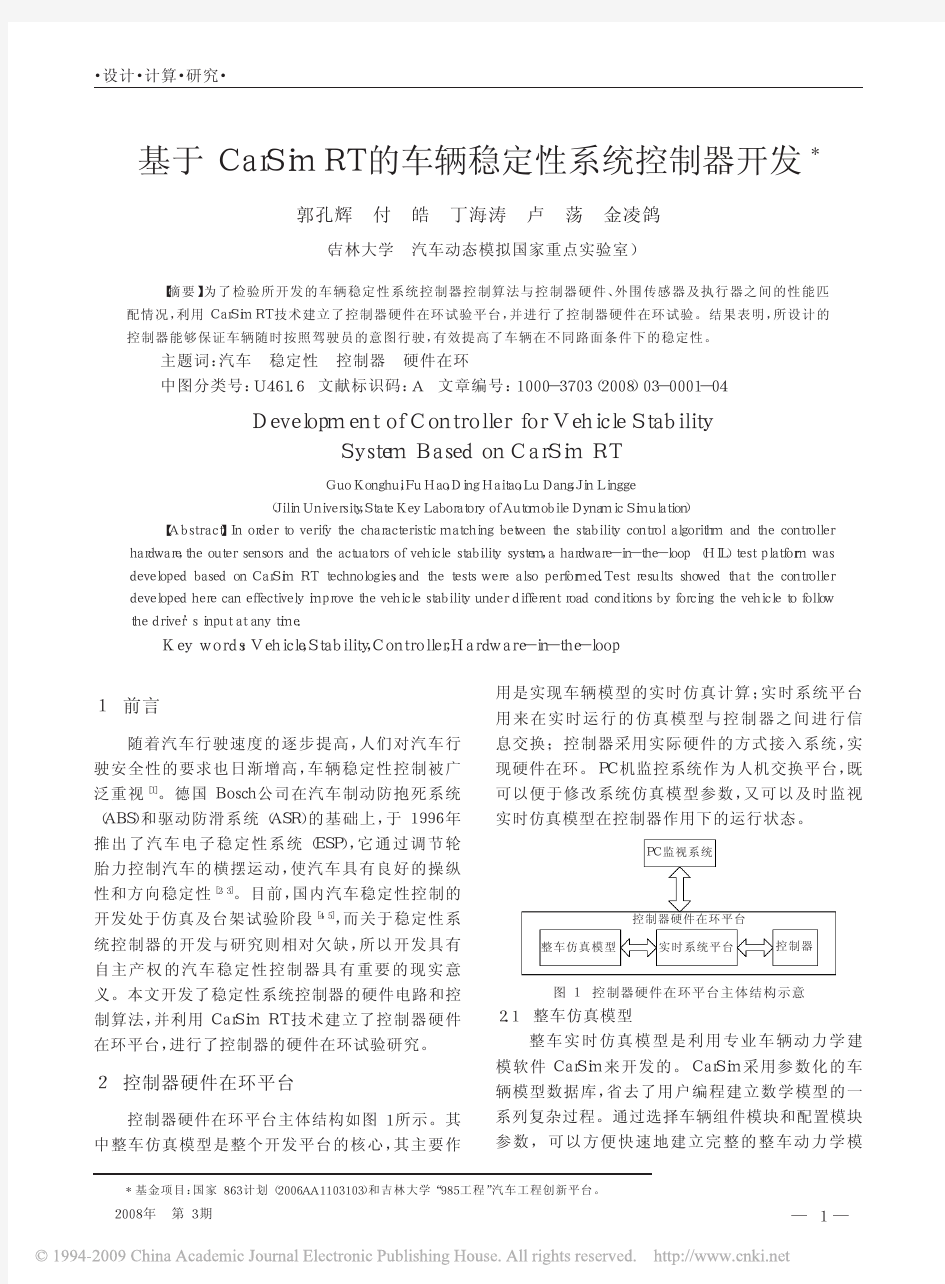
控制器硬件在环平台主体结构如图1所示。其中整车仿真模型是整个开发平台的核心,其主要作用是实现车辆模型的实时仿真计算;实时系统平台用来在实时运行的仿真模型与控制器之间进行信息交换;控制器采用实际硬件的方式接入系统,实现硬件在环。PC机监控系统作为人机交换平台,既可以便于修改系统仿真模型参数,又可以及时监视实时仿真模型在控制器作用下的运行状态。
图1控制器硬件在环平台主体结构示意2.1整车仿真模型
整车实时仿真模型是利用专业车辆动力学建模软件CarSim来开发的。CarSim采用参数化的车辆模型数据库,省去了用户编程建立数学模型的一系列复杂过程。通过选择车辆组件模块和配置模块参数,可以方便快速地建立完整的整车动力学模
-基金项目:国家863计划(2006AA1103103)和吉林大学“985工程”汽车工程创新平台。
PC监视系统
控制器硬件在环平台
整车仿真模型实时系统平台控制器
型,大大缩短了开发周期。选用CarSim车辆模型库中的某前轮驱动前轮转向轿车模型(模型参数列于表1),模型包括悬架系统、动力传动系统、制动系统、转向系统、轮胎和车体。该车辆模型不仅可以仿真极限状况下的车辆状态,而且模型精度高,可以用于稳定性控制仿真试验和效果分析。另外,该车辆模型还可以进行实时计算,可满足硬件在环平台的要求。
表1某前轮驱动前轮转向轿车模型参数
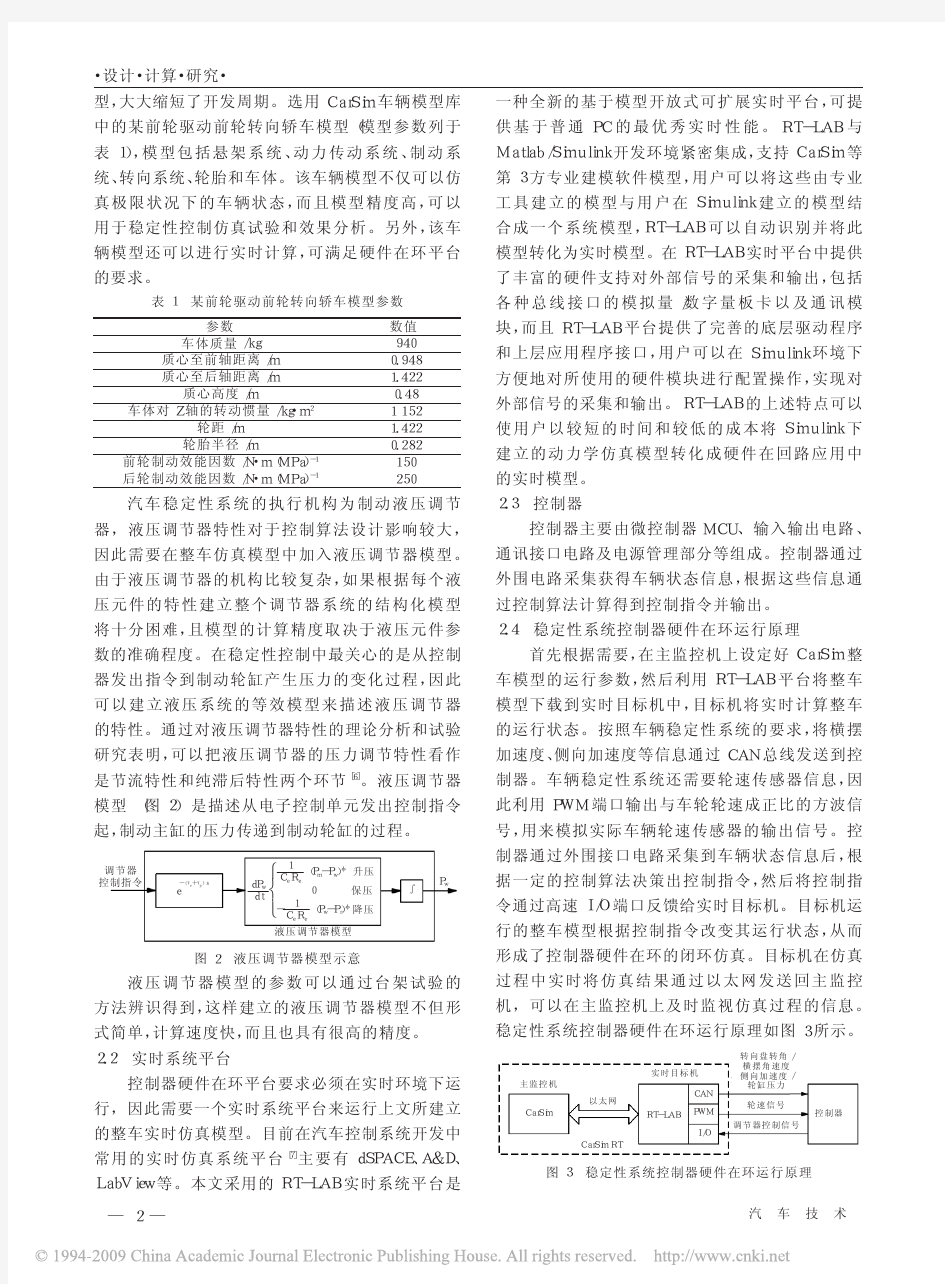
汽车稳定性系统的执行机构为制动液压调节器,液压调节器特性对于控制算法设计影响较大,因此需要在整车仿真模型中加入液压调节器模型。由于液压调节器的机构比较复杂,如果根据每个液压元件的特性建立整个调节器系统的结构化模型将十分困难,且模型的计算精度取决于液压元件参数的准确程度。在稳定性控制中最关心的是从控制器发出指令到制动轮缸产生压力的变化过程,因此可以建立液压系统的等效模型来描述液压调节器的特性。通过对液压调节器特性的理论分析和试验研究表明,可以把液压调节器的压力调节特性看作是节流特性和纯滞后特性两个环节[6]。液压调节器模型(图2)是描述从电子控制单元发出控制指令起,制动主缸的压力传递到制动轮缸的过程。
图2液压调节器模型示意
液压调节器模型的参数可以通过台架试验的方法辨识得到,这样建立的液压调节器模型不但形式简单,计算速度快,而且也具有很高的精度。2.2实时系统平台
控制器硬件在环平台要求必须在实时环境下运行,因此需要一个实时系统平台来运行上文所建立的整车实时仿真模型。目前在汽车控制系统开发中常用的实时仿真系统平台[7]主要有dSPACE、A&D、LabView等。本文采用的RT-LAB实时系统平台是一种全新的基于模型开放式可扩展实时平台,可提供基于普通PC的最优秀实时性能。RT-LAB与Matlab/Simulink开发环境紧密集成,支持CarSim等第3方专业建模软件模型,用户可以将这些由专业工具建立的模型与用户在Simulink建立的模型结合成一个系统模型,RT-LAB可以自动识别并将此模型转化为实时模型。在RT-LAB实时平台中提供了丰富的硬件支持对外部信号的采集和输出,包括各种总线接口的模拟量/数字量板卡以及通讯模块,而且RT-LAB平台提供了完善的底层驱动程序和上层应用程序接口,用户可以在Simulink环境下方便地对所使用的硬件模块进行配置操作,实现对外部信号的采集和输出。RT-LAB的上述特点可以使用户以较短的时间和较低的成本将Simulink下建立的动力学仿真模型转化成硬件在回路应用中的实时模型。
2.3控制器
控制器主要由微控制器MCU、输入输出电路、通讯接口电路及电源管理部分等组成。控制器通过外围电路采集获得车辆状态信息,根据这些信息通过控制算法计算得到控制指令并输出。
2.4稳定性系统控制器硬件在环运行原理
首先根据需要,在主监控机上设定好CarSim整车模型的运行参数,然后利用RT-LAB平台将整车模型下载到实时目标机中,目标机将实时计算整车的运行状态。按照车辆稳定性系统的要求,将横摆加速度、侧向加速度等信息通过CAN总线发送到控制器。车辆稳定性系统还需要轮速传感器信息,因此利用PWM端口输出与车轮轮速成正比的方波信号,用来模拟实际车辆轮速传感器的输出信号。控制器通过外围接口电路采集到车辆状态信息后,根据一定的控制算法决策出控制指令,然后将控制指令通过高速I/O端口反馈给实时目标机。目标机运行的整车模型根据控制指令改变其运行状态,从而形成了控制器硬件在环的闭环仿真。目标机在仿真过程中实时将仿真结果通过以太网发送回主监控机,可以在主监控机上及时监视仿真过程的信息。稳定性系统控制器硬件在环运行原理如图3所示。
图3稳定性系统控制器硬件在环运行原理
参数数值
车体质量/kg940质心至前轴距离/m0.948
质心至后轴距离/m1.422质心高度/m0.48车体对Z轴的转动惯量/kg?m21152
轮距/m1.422
轮胎半径/m0.282前轮制动效能因数/N?m(MPa)-1150后轮制动效能因数/N?m(MPa)-1250调节器
控制指令
e-(τv+τp)sdPw
dt
1
CeRe(
Pm-Pw)"升压
0保压
-
1
CeRe(
Pw-Pr)"降
!
#
"
#
$压
Pw
∫
液压调节器模型
主监控机
CarSim
以太网
转向盘转角/
横摆角速度
侧向加速度/
轮缸压力
实时目标机
CarSimRT
RT-LAB
CAN
PWM
I/O
轮速信号
调节器控制信号
控制器
该控制器硬件在环平台能够对控制器的软、硬件进行验证和评估,具有开发周期短、效率高和成本低等优点。
3
控制器设计
3.1
控制器硬件设计
选择Infenion16位单片机XC164CS作为控制
器CPU[8],辅以相应的外围电路。控制器电路原理如图4所示。在控制器硬件设计过程中,充分考虑到贴近实际系统的原则,均采用与实际车辆传感器相对应的接口。
图4控制器电路原理
控制器通过CAN总线与实时目标机进行通讯,从而获得包括转向盘转角、横摆角速度、侧向加速度和制动轮缸压力等信息。XC164CS单片机带有
TwinCAN模块,其包括两个独立的CAN节点,支
持CAN2.0A和CAN2.0B通讯协议。
轮速信号是幅值为5V的方波信号,通过信号调理电路之后传递给XC164CS的捕捉/比较单元进
行脉冲捕捉,通过测量轮速信号的周期可以计算得到轮速信息。
通过单片机的I/O端口输出控制算法决策出的液压调节器电磁阀开关指令。
调试接口JTAG可以在线修改单片机内部的控制算法及参数;时钟电路提供单片机运行的准确实时时钟;为防止程序运行出错,设置了看门狗电源模块,增加了控制器工作可靠性。
为防止电磁干扰或强电干扰,在控制器设计中采用了光电隔离技术,可以有效地保护控制器元件。
3.2控制器软件设计
车辆稳定性控制的主要的控制参数为质心侧
偏角β和横摆角速度r[9]。在实际车辆系统中,由于横摆角速度较容易通过车用传感器测量获得,因此文中采用基于横摆角速度控制的方法,则控制器软件结构如图5所示。
图5控制器软件结构示意
选择2自由度车辆模型的理想稳态转向特性进行汽车稳定性控制:
r@=
Vx
l?(1+KV2x
)?
δ(1)
式中,l为轴距;K为汽车稳定性因数;r(为理想横摆角速度;Vx为车辆纵向速度;δ为转向盘转角。
同时,理想横摆角速度必须受路面附着系数μ的限制,所以还应满足如下条件:
r@≤μ?g
Vx
(2)
故式(1)应当修正为:
r@=min
Vxl
?(1+KV2x)?
δ,μ?gVx"
#
(3)
横摆力矩决策模块采用PID控制算法[10]。其控制思想是以实际横摆角速度与理想横摆角速度之间的偏差作为控制参考量,当该偏差绝对值超过控制算法设定的范围之后,可认为此时车辆处于不稳定状态,需要施加横摆力矩加以干预。
模块输入误差:
e=r(-r
(4)
式中,r为实际横摆角速度
模块输出附加的横摆力矩:ΔM=kp?e+kI?e+kd
?e(5)
式中:kp、kI、kd为PID控制器参数。
压力决策模块根据当前车辆的运行状态和附加横摆力矩的大小决定各个车轮上施加的制动力,充分利用效率较高的对角车轮中的外前轮或内后轮施加制动力来产生汽车横摆力矩,以提高控制的有效性。
车轮轮缸压力变化与产生的横摆力矩之间的关系为[11]:
ΔM=KMP?ΔPi
(6)
控制指令决策模块根据压力决策的结果和当前轮缸压力决定调节器电磁阀的控制指令。每个轮缸由一个常开阀和常闭阀进行控制,两个阀的不同状态组合成升压、降压和保压3种状态。由于保压状态很难出现,因此可以在压力决策值附近增加一个区域(Pi(-PΔ,Pi(+PΔ),在此区域内进行保压,超出此区域再进行升压或降压[11]。用1代表升压,-1代表减压,0代表保压,则各通道的电磁阀状态为:
看门狗电源模块
调节器控制信号
调试接口JTAG
时钟电路
复位单元调试单元时钟单元
XC164CS
CAN通讯单元
捕捉单元
数字输出
CAN总线接口电路轮速信号调理电路
车辆状态
参考车辆模型(2DOF)r(+-
Δ
rΔMr横摆力矩决策
压力决策
控制指令
决策
调节器控制信号Pi(Pi
Ui=1Pi<Pi%-PΔ
-1
Pi>Pi%+PΔ
0Pi%-PΔ<Pi<Pi%+PΔ!
#
"#
$
(7)
4
控制器硬件在环试验
4.1
低附着路面转向盘转角正弦输入
在摩擦系数为0.2的路面、初始车速为100km/
h的情况下,转向盘输入一个幅值为0.5πrad、周期为6s的正弦信号,这相当于在冰雪路面上做连续换道试验。在试验过程中,控制算法仅对前轮制动压力进行调节来产生横摆力矩。试验结果如图6~图
8所示。
图6有、无稳定性控制车辆横摆角速度对比
图7有、无稳定性控制车辆质心侧偏角对比
图8电磁阀控制指令
从图6~图8中可以看出,带有稳定性控制的车辆对理想横摆角速度的跟踪效果比较好,汽车质心侧偏角也很小,汽车没有失稳;没有稳定性控制的车辆横摆角速度无法跟随转向盘转角,汽车质心侧
偏角逐渐增大,车辆无法按照驾驶员的意图进行连续换道,车辆发生明显失稳,处于危险的情况。由此可见,带有稳定性控制的车辆在低附着路面上的稳定性得到了很大的提高。
4.2高附着路面转向盘转角递增梯形输入在摩擦系数为0.9的路面、初始车速为100km/h
的情况下进行转向盘转角递增梯形输入试验,转向盘初始输入幅值为0.7πrad,最终输入幅值为1.8πrad。在试验过程中,控制算法仅对前轮制动压力进行调节来产生横摆力矩。试验结果如图9~图11所示。
图9有、无稳定性控制车辆横摆角速度对比(高附着路面)
图10
有、无稳定性控制车辆质心侧偏角对比(高附着路面)
图11
电磁阀控制指令(高附着路面)
从图9~图11中可以看出,施加稳定性控制的车辆与没有稳定性控制的车辆相比,横摆角速度几乎没有变化,但质心侧偏角比没有稳定性控制的车辆小,说明稳定性控制能使车辆更好地按照驾驶员的意图行驶。总体上讲,在高附着路面上对车辆施
(下转第51页)
1050-5-10-15-20-25-30横摆角速度/(°)?s-1
05101520
时间/s
有稳定性控制
无稳定性控制理想横摆角速度
10080
6040200-20
0
5
1015
20
时间/s
质心侧偏角/(°)
有稳定性控制
无稳定性控制
1
0
-1
0
5
1015
20
时间/s
左前轮
右前轮
电磁阀控制指令
30
20100-10-20-30
0
5
101520
时间/s
横摆角速度/(°)?s-1
有稳定性控制
无稳定性控制理想横摆角速度
420-2-40
5
10
15
20
时间/s
质心侧偏角/(°)
有稳定性控制
无稳定性控制
10
-1
0
5
101520
时间/s
左前轮
右前轮
电磁阀控制指令
(上接第4页)
加控制的效果不是很明显,但并非车辆在高附着路面上行驶不需要进行稳定性控制,尤其是在车辆高速行驶时,往往由于路面条件的变化或外界的干扰,会使车辆的运行状态发生较大变化,车辆依然有失稳的可能性。所以,稳定性控制可以保证车辆在任何情况下都按照驾驶员的意图行驶,减小发生危险的可能性。
5结束语
a.利用CarSimRT技术建立了控制器硬件在环平台。该平台能够对控制器硬件电路和软件算法进行快速验证和评估,大大加快了控制器的开发周期和开发效率,可以广泛地应用于车辆控制系统的开发过程中。
b.应用所建立的硬件在环平台进行了不同路面条件下车辆稳定性控制试验,结果表明,本文控制算法和控制器硬件匹配良好,能够有效提高车辆在不同路面上的稳定性。
参考文献
1vanZantenAT,ErhardtR,LandesfeindKandPfaffG.VDCSy-
stemDevelopmentandPerspective.SAEPaper,1998.
2vanZantenAT.ControlAspectsoftheBosch-VDC.Internati-onalSymposiumonAdvancedVehicleControl.German,1996.3vanZantenAT.BoschESPSystem:5YearofExperience.SAEPaper,2000.
4贾豫东,宋健,孙群.用于电子稳定程序的汽车模型和控制策略.公路交通科技,2004(5):132~136.
5丁海涛,郭孔辉,张建伟,等.汽车ESP硬件与驾驶员在回路仿真试验台的开发与应用.汽车工程,2006(4):346~350.6刘溧.汽车ABS仿真试验台的开发与液压系统动态特性的研究:[学位论文].长春:吉林工业大学,2000.
7齐鲲鹏,隆武强,陈雷.硬件在环仿真在汽车控制系统开发中的应用及关键技术.内燃机,2006(5):24~27.
8吴志宏.英飞凌16位单片机XC164CS的原理与基础应用.上海:同济大学出版社,2006.
9郑水波,韩正之,唐厚君.汽车稳定性控制.自动化博览,2005(4):22~24.
10刘金琨.先进PID控制及其MATLAB仿真.北京:电子工业出版社,2003
11丁海涛.轮胎附着极限下汽车稳定性控制的仿真研究:[学位论文].长春:吉林大学,2003.
(责任编缉学林)修改稿收到日期为2008年1月3日。
度由32°改为40°,钻芯厚度增加约20%,以提高刀具的刚性和导向性。
c.将刀具的进给速度由原来的0.10mm改变为0.15mm,以提高刀具分断切屑的能力。
通过以上改进措施,切屑变得更为均匀,刀具折断率明显降低。
3.3润滑效果差的原因及解决措施
润滑不良主要体现在刀尖处油雾的喷射量不足,难以起到应有的润滑效果,这也是导致刀具折断的原因之一。通过试验发现,此情况下刀具折断时钻头磨耗大于0.5mm,且刀尖处有明显的崩刃现象。经检查,MQL装置的动作、空气压力均正常,而刀柄的喷雾油孔有堵塞现象,堵塞物为润滑油因氧化而生成的固体物质。这是由于使用的润滑油CM30T含有大量的不饱和脂肪酸,这种油的分子活性较大,容易分解产生固体物质,进而堵塞刀柄的喷雾油孔。
针对上述情况,将CM30T润滑油更换为MF20T润滑油。MF20T润滑油的氧化性能稳定,不易分解产生固体物质,提高了润滑效果。同时,还应定期清洗MQL装置的供油管路与刀柄的喷雾油孔,确保油路畅通。3.4改进后效果
在一汽丰田(长春)发动机有限公司曲轴生产线上,利用QML深孔钻削工艺,并对刀具角度及加工参数进行改进后,解决了生产中刀具折断及刀具寿命降低的问题,刀具的折断率由使用初期的15%降低到现在的1.5%,刀具寿命也由原来的60件提高到100件。
4结束语
依据MQL深孔钻削的技术特点及工艺原理,针对曲轴深孔加工中频繁出现刀具折断的问题进行了刀具试验,通过对刀具角度及加工工艺参数等的改进,使刀具折断率由15%降低到1.5%,刀具寿命也由60件提高到100件。
参考文献
1黄如林.切削加工手册.北京:化学工业出版社,2004.
2肖诗刚.刀具材料及其合理选择.北京:机械工业出版社,1990.
3符伟.实用切削加工手册.湖南:湖南科学技术出版社,2003.
4永田雅亨.综合润滑技术.日本:电装公司,2004.
(责任编辑文楫)修改稿收到日期为2007年11月26日。
?材料?工艺?设备?
基于MATLAB的车辆两自由度操纵稳定性模型及分析 汽车操纵稳定性是汽车高速安全行驶的生命线,是汽车主动安全性的重要因素之一;汽车操纵稳定性一直汽车整车性能研究领域的重要课题。本文采用MATLAB仿真建立了汽车二自由度动力学模型,通过仿真分析了不同车速、不同质量和不同侧偏刚度对汽车操纵稳定性的影响。研究表明,降低汽车行驶速度,增加前后轮侧偏刚度和减小汽车质量可以减小质心侧偏角,使固有圆频率增加降低行驶车速还可以使阻尼比增加,超调量及稳定时间减少。 车辆操纵稳定性评价主要有客观评价和主观评价俩种方法。客观评价是通过标准实验得到汽车状态量,再计算汽车操纵稳定性的评价指标,这可通过实车实验和模拟仿真完成,在车辆开发初期可通过车辆动力仿真进行车辆操纵稳定性研究。 1二自由度汽车模 为了便于掌握操纵稳定性的基本特性,对汽车简化为线性二自由度的汽车模型,忽略转向系统的影响,直接一前轮转角作为输入;忽略悬架的作用,认为汽车车厢只作用于地面的平面运动。
2 运动学分析 确定汽车质心的(绝对)加速度在车辆坐标系的分量 和。Ox 与Oy 为车辆坐标系的纵轴与横轴。质心速度 与t 时刻在Ox 轴上 的分量为u ,在oy 轴上的分量为v 。 2.1 沿Ox 轴速度分量的变化为: ()()cos sin cos cos sin sin u u u v v u u u v v θθ θθθθ+??--+??=?+??---?? 考虑到很小并忽略二阶微量,上式变成: 除以并取极限,便 是汽车质心绝对加速度在车辆坐标系。
沿Ox 轴速度分量的变化为: u x r d d v u v dt dt a θω=-=- 同理,汽车质心绝对加速度沿横轴oy 上的分量为:y r v u a ω=+ 2.2 二自由度动力学方程 二自由度汽车受到的外力沿y 轴方向的合力与绕质心的力矩和为: 12 12cos a cos Y Y Y Z Y Y b F F F M F F δδ=+=-∑∑ 式中,,为地面对前后轮的侧向反作用力;为前轮转角。 考虑到很小,上式可以写上: 11221122 a Y Z b k k F k k M αα αα=+=-∑∑ 根据坐标系的规定,前后侧偏角为: ()12r r r a u v b b u u δξβδβωαωωα=--=+ --==- 由此,可以列出外力,外力矩与汽车参数的关系式为: 1212r r Y r r Z a b u u a b a b u u k k F k k M βδββδβωωωω????=+-+- ? ?????????=+--- ? ????? ∑∑ 所以,二自由度汽车的运动微分方程为: ()1212r r r r r z r a b m v u u u a b a b u u k k k k I βδββδβωωωωωω????+-+-=+ ? ?????????+---= ? ???? ? 上式可以变形为:
车辆稳定性控制系统VSC ---汽车主动安全新技术关键词:车辆动态稳定性控制系统、主动安全、打滑、传感器、转向不足、转向过度。 摘要:车辆动态稳定性控制系统(VSC) 是一种可在各种行驶条件下提高车辆行驶稳定性的新型主动安全体系。它是由是由VSC 控制系统、发动机电控系统、各传感器、制动控制器、油门控制器等单元构成的完整控制体系。系统的大部分元件与ABS、TCS 系统共用, 系统通过各传感器数据的输入对车辆打滑情况进行判断,然后自动介入车辆的操控, 以油门及制动控制器来修正车辆的动态,由此可迅速的将车辆于转弯过程中出现转向过度或转向不足的现象修正到原有正常路径的循迹行驶, 正文: 1 简单介绍 车辆动态稳定性控制系统(VSC) 是一种可在各种行驶条件下提高车辆行驶稳定性的新型主动安全体系。VSC 控制系统增强了制动防抱死系统(ABS)、牵引力控制系统(TCS) 以及发动机扭矩控制系统的功能, 其功能处于比ABS 和TCS 更高的控制层次统计资料显示, 在重大死亡车祸中, 约1 /6是由于车辆失控造成的; 而在车辆失控事件中,由车辆打滑造成的占到了75%。丰田VSC 系
统利用控制单元与制动系统及发动机系统相联, 随时监测车身的 动态状况, 当出现打滑现象时, 系统自动介入油门与制动的操作, 控制发动机的功率输出, 并适时对适当的车轮施加制动, 以利用有附着力的轮胎, 使车辆稳定减速, 修正车辆的动态, 使其稳 定行驶在本来的行驶路线上, 保证车辆安全。丰田公司开发的VSC (Vehicle Stability Control)车辆动态稳定性控制系统, 首见于1997 年推出的Lexus 车系中, 现已普及至Lexus 及 Toyota旗下大部分的车辆: 花冠、锐志、皇冠、佳美、霸道等等。在2007年3月新推出的锐志2.5S特别天窗版中,更是增加了VSC 系统作为其一个卖点。作为ABS、TCS (亦称TRC 驱动防滑转或ASR 加速防滑控制系统) 系统的功能扩展, 车辆动态稳定控制 系统已成为主动安全系统发展的一个重要方向。 VSC 系统在汽车高速转弯将要出现失控时, 可有效地增加汽车的稳定性, 系统通过对从各传感器传来的车辆行驶状态信息进行分析, 向制动防抱 死系统ABS、牵引力控制系统TCS 发出纠偏指令, 帮助车辆维持动态平衡, 减少事故发生。VSC 系统可使车辆在各种状况下保持最佳的稳定性, 在过度转向或不足转向的情形下作用尤为明显。 目前不同厂家对车辆稳定性控制系统的称谓不同, 如宝马公司将 其称为DSC 系统; 保时捷则称其为PSM; 本田公司称为VSA 系统。VSA 及VSC 系统与奔驰公司的VSC 均属同一类系统, 是转 向时对由制动力产生危险的汽车进行动态修正的主动安全装置。
汽车操纵稳定性研究方法探讨
汽车操纵稳定性研究方法探讨 1 操纵稳定性的研究历史和概况研究 对汽车操稳性的系统研究, 早在20 世纪3O 年代就已经开始。对车辆控制的重视导致对悬架和转向机构的运动学研究。1925 年平顺性理论初步形成规模。同年, Broulheit 在文章中首次提出侧偏和侧偏角的概念【Broulheit, 1925】。1931 年, Becker、Fromm 和Maruhn 在发表的文章中分析了轮胎在转向系振动中起的作用, 进一步研究了轮胎特性【Becker,1931】。对轮胎的研究使进一步分析车辆稳定性成为可能。 20 世纪50 年代, 建立简单的汽车动力学模型,研究人员开始从事汽车动力学性能仿真, 分析汽车操纵稳定性。19 世纪50 年代中期所作的研究工作为建立汽车数学模型打下基础。对轮胎的基本了解使建立相对精确的轮胎数学模型成为可能。 20 世纪60 年代, 开始从控制理论和振动理论出发, 采用开环系统瞬态响应、系统特性分析和系统稳定性理论设计汽车的总成系统。但是, 应用开环系统分析方法, 仅用于分析汽车的方向稳定性条件, 因为当时不知道如何评价汽车的开环特性和瞬态特性, 很难直接在车辆设计中应用。 到20 世纪70 年代, 安全实验车( ESV)研究计划实施, 促使人们去研究之中实用方法, 用来设计汽车的动力学性能。这个阶段, 各国主要采用系统工程学方法探索汽车动力学性能评价方法。依据大量实验和理论分析, 形成了以驾驶员主观评价为主, 客观评价指标限制为辅的一整套主观评价设计方法。 20 世纪70 年代车辆动力学仿真模型变得更加复杂和真实。这主要归功于计算机技术的发展。以前的仿真工作都在模拟计算机上进行, 它能解决实时动力学问题, 但其致命缺点是不能解决非线性问题。由于数字计算机逐步取代了模拟计算机和混合计算机, 因而必须建立完全数字化的车辆动力学模型。考虑到计算机的费用及计算速度, 建立有效的计算机模型是必要的。 近年来, 随着多体动力学的诞生和发展, 汽车建模方法出现了新的改变。由于
系统稳定性意义以及稳定性的几种定义 一、引言: 研究系统的稳定性之前,我们首先要对系统的概念有初步的认识。 在数字信号处理的理论中,人们把能加工、变换数字信号的实体称作系统。由于处理数字信号的系统是在指定的时刻或时序对信号进行加工运算,所以这种系统被看作是离散时间的,也可以用基于时间的语言、表格、公式、波形等四种方法来描述。从抽象的意义来说,系统和信号都可以看作是序列。但是,系统是加工信号的机构,这点与信号是不同的。人们研究系统还要设计系统,利用系统加工信号、服务人类,系统还需要其它方法进一步描述。描述系统的方法还有符号、单位脉冲响应、差分方程和图形。 电路系统的稳定性是电路系统的一个重要问题,稳定是控制系统提出的基本要求,也保证电路工作的基本条件;不稳定系统不具备调节能力,也不能正常工作,稳定性是系统自身性之一,系统是否稳定与激励信号的情况无关。对于线性系统来说可以用几点分布来判断,也可以用劳斯稳定性判据分析。对于非线性系统的分析则比较复杂,劳斯稳定性判据和奈奎斯特稳定性判据受到一定的局限性。 二、稳定性定义: 1、是指系统受到扰动作用偏离平衡状态后,当扰动消失,系统经过自身调节能否以一定的准确度恢复到原平衡状态的性能。若当扰动消失后,系统能逐渐恢复到原来的平衡状态,则称系统是稳定的,否则称系统为不稳定。 稳定性又分为绝对稳定性和相对稳定性。 绝对稳定性。如果控制系统没有受到任何扰动,同时也没有输入信号的作用,系统的输出量保持在某一状态上,则控制系统处于平衡状态。 (1)如果线性系统在初始条件的作用下,其输出量最终返回它的平衡状态,那么这种系统是稳定的。 (2)如果线性系统的输出量呈现持续不断的等幅振荡过程,则称其为临界稳定。(临界稳定状态按李雅普洛夫的定义属于稳定的状态,但由于系统参数变化等原因,实际上等幅振荡不能维持,系统总会由于某些因素导致不稳定。因此从工程应用的角度来看,临界稳定属于不稳定系统,或称工程意义上的不稳定。) (3)如果系统在初始条件作用下,其输出量无限制地偏离其平衡状态,这称系统是不稳定的。 实际上,物理系统的输出量只能增大到一定范围,此后或者受到机械制动装置的限制,或者系统遭到破坏,也可以当输出量超过一定数值后,系统变成非线性的,从而使线性微分方程不再适用。因此,绝对稳定性是系统能够正常工作的前提。
第5章汽车的操纵稳定性 学习目标 通过本章的学习,应掌握汽车行驶的纵向和横向稳定性条件;掌握车辆坐标系的有关术语,了解影响侧偏特性的因素,掌握轮胎回正力矩与侧偏特性的关系;熟练掌握汽车的稳态转向特性及其影响因素;了解汽车转向轮的振动和操纵稳定性的道路试验内容。 汽车在其行驶过程中,会碰到各种复杂的情况,有时沿直线行驶,有时沿曲线行驶。在出现意外情况时,驾驶员还要作出紧急的转向操作,以求避免事故。此外,汽车还要经受来自地面不平、坡道、大风等各种外部因素的干扰。一辆操纵性能良好的汽车必须具备以下的能力: (1)根据道路、地形和交通情况的限制,汽车能够正确地遵循驾驶员通过操纵机构所给定的方向行驶的能力——汽车的操纵性。 (2)汽车在行驶过程中具有抵抗力图改变其行驶方向的各种干扰,并保持稳定行驶的能力——汽车的稳定性。 操纵性和稳定性有紧密的关系:操纵性差,导致汽车侧滑、倾覆,汽车的稳定性就破坏了。如稳定性差,则会失去操纵性,因此,通常将两者统称为汽车的操纵稳定性。 汽车的操纵稳定性,是汽车的主要使用性能之一,随着汽车平均速度的提高,操纵稳定性显得越来越重要。它不仅影响着汽车的行驶安全,而且与运输生产率与驾驶员的疲劳强度有关。 节汽车行驶的纵向和横向稳定性 5.1.1 汽车行驶的纵向稳定性 汽车在纵向坡道上行驶,例如等速上坡,随着道路坡度增大,前轮的地面法向反作用力不断减小。当道路坡度大到一定程度时,前轮的地面法向反作用力为零。在这样的坡度下,汽车将失去操纵性,并可能产生纵向翻倒。汽车上坡时,坡度阻力随坡度的增大而增加,在坡度大到一定程度时,为克服坡度阻力所需的驱动力超过附着力时,驱动轮将滑转。这两种情况均使汽车的行驶稳定性遭到破坏。 图汽车上坡时的受力图 图为汽车上坡时的受力图,如汽车在硬路面上以较低的速度上坡,空气阻力 w F可以忽略不计,由于剩余驱动力用于等速爬坡,即汽车的加速阻力0 = j F,加速阻力矩0 = j M,而车轮的滚动阻力矩 f M的数值相对来说比较小,可不计入。 分别对前轮着地点及后轮着地点取力矩,经整理后可得 ? ? ? ?? ? ? = + - = - - sin cos sin cos 2 1 L G h aG Z L G h bG Z g g α α α α () 当前轮的径向反作用力0 1 = Z时,即汽车上陡坡时发生绕后轴翻车的情况,由式可得
汽车操纵稳定性研究方法探讨 刘进伟1,徐达1,吴志新2 1.武汉理工大学汽车学院车辆工程系,湖北武汉 430070 2.天津清源电动车辆有限公司,天津 300457 liujinweixiaodao@https://www.doczj.com/doc/6411806340.html, 摘要:本文综述了操稳性研究和评价的历史、现状和存在的问题,着重介绍了客观评价、主观评价、人一车闭环系统综合评价等几种评价方法,以及基于汽车一驾驶员一环境(道路)闭环系统、模糊逻辑控等几种研究方法。提出了操稳性研究的发展趋势,这对全面了解汽车操纵稳定性问题具有指导和借鉴的作用。 关键词:操纵稳定性,历史,研究方法,评价,发展趋势 1操纵稳定性的研究历史和概况 对汽车操稳性的系统研究,早在20世纪3O年代就已经开始。对车辆控制的重视导致对悬架和转向机构的运动学研究。1925 年平顺性理论初步形成规模。同年,Broulheit 在文章中首次提出侧偏和侧偏角的概念【Broulheit, 1925】。1931 年,Becker、Fromm 和 Maruhn 在发表的文章中分析了轮胎在转向系振动中起的作用,进一步研究了轮胎特性【Becker,1931】。对轮胎的研究使进一步分析车辆稳定性成为可能[1]。 20世纪50年代,建立简单的汽车动力学模型,研究人员开始从事汽车动力学性能仿真,分析汽车操纵稳定性。19 世纪 50 年代中期所作的研究工作为建立汽车数学模型打下基础。对轮胎的基本了解使建立相对精确的轮胎数学模型成为可能。 20世纪60年代,开始从控制理论和振动理论出发,采用开环系统瞬态响应、系统特性分析和系统稳定性理论设计汽车的总成系统[2]。但是,应用开环系统分析方法,仅用于分析汽车的方向稳定性条件,因为当时不知道如何评价汽车的开环特性和瞬态特性,很难直接在车辆设计中应用。 到20世纪70年代,安全实验车(ESV)研究计划实施,促使人们去研究之中实用方法,用来设计汽车的动力学性能。这个阶段,各国主要采用系统工程学方法探索汽车动力学性能评价方法。依据大量实验和理论分析,形成了以驾驶员主观评价为主,客观评价指标限制为辅的一整套主观评价设计方法[2]。20 世纪70年代车辆动力学仿真模型变得更加复杂和真实。这主要归功于计算机技术的发展。以前的仿真工作都在模拟计算机上进行,它能解决实时动力学问题,但其致命缺点是不能解决非线性问题。由于数字计算机逐步取代了模拟计算机和混合计算机,因而必须建立完全数字化的车辆动力学模型。考虑到计算机的费用及计算速度,建立有效的计算机模型是必要的。 - 1 -
第 五 章 5.1一轿车(每个)前轮胎的侧偏刚度为-50176N /rad 、外倾刚度为-7665N /rad 。若轿车向左转弯,将使两前轮均产生正的外倾角,其大小为40。设侧偏刚度与外倾刚度均不受左、右轮载荷转移的影响.试求由外倾角引起的前轮侧偏角。 答: 由题意:F Y =k α+k γγ=0 故由外倾角引起的前轮侧偏角: α=- k γγ/k=-7665?4/-50176=0.6110 5.2 6450轻型客车在试验中发现过多转向和中性转向现象,工程师们在前悬架上加装前横向稳定杆以提高前悬架的侧倾角刚度,结果汽车的转向特性变为不足转向。试分析其理论根据(要求有必要的公式和曲线)。 答: 稳定性系数:??? ? ??-=122k b k a L m K 1k 、2k 变化, 原来K ≤0,现在K>0,即变为不足转向。 5.3汽车的稳态响应有哪几种类型?表征稳态响应的具体参数有哪些?它们彼此之间的关系如何(要求有必要的公式和曲线)? 答: 汽车稳态响应有三种类型 :中性转向、不足转向、过多转向。 几个表征稳态转向的参数: 1.前后轮侧偏角绝对值之差(α1-α2); 2. 转向半径的比R/R 0;
3.静态储备系数S.M. 彼此之间的关系见参考书公式(5-13)(5-16)(5-17)。 5.4举出三种表示汽车稳态转向特性的方法,并说明汽车重心前后位置和内、外轮负荷转移如何影响稳态转向特性? 答:方法: 1.α1-α2 >0时为不足转向,α1-α2 =0时 为中性转向,α1-α2 <0时为过多转向; 2. R/R0>1时为不足转向,R/R0=1时为中性转向, R/R0<1时为过多转向; 3 .S.M.>0时为不足转向,S.M.=0时为中性转向, S.M.<0时为过多转向。 汽车重心前后位置和内、外轮负荷转移使得汽车质心至前后轴距离a、b发生变化,K也发生变化。 5.5汽车转弯时车轮行驶阻力是否与直线行驶时一样? 答:否,因转弯时车轮受到的侧偏力,轮胎产生侧偏现象,行驶阻力不一样。 5.6主销内倾角和后倾角的功能有何不同? 答:主销外倾角可以产生回正力矩,保证汽车直线行驶;主销内倾角除产生回正力矩外,还有使得转向轻便的功能。 5.7横向稳定杆起什么作用?为什么有的车装在前恳架,有的装在后悬架,有的前后都装? 答:横向稳定杆用以提高悬架的侧倾角刚度。
关键词:汽车操纵稳定性 1、蔡世芳(1985). "汽车操纵稳定性评价指标和参数匹配的工程分析方法." 汽车工程7(3): 21-29. 本文提出一种工程分析方法,并利用此方法研究评价指标和参数匹配规律。全文主要内容有四部份: (1)工程分析方法的数学模型; (2)评价指标的工程计算方法; (8)评价指标的相关分析和主要评价指标的推荐。(4)操纵稳定性参数匹配的基本规律。 2、岑少起, 潘筱, et al. (2006). "ADAMS 在汽车操纵稳定性仿真中的应用研究." 郑州大学学报: 工学版27(003): 55-58. 运用ADAMS软件建立了C型车多自由度整车多体动力学仿真模型,详细分析了前悬架系统、后钢板弹簧系统和轮胎模型,同时提出了一种建立钢板弹簧多体模型的新方法——中性面法,并对不同方向盘转角及改变整车质心位置下的操纵稳定性进行了动力学仿真.经过与实际车型性能比较,该模型与分析结果是准确、可靠的,可应用于汽车平顺性研究中. 3、陈克, 王工, et al. (2005). "基于ADAMS 的汽车操纵稳定性虚拟试验演示系统开发." 沈阳理工大学学报24(001): 59-61. 利用ADAMS动力学软件建立了整车多刚体系统模型.分别考虑车型、悬架、轮胎、车速等不同因素对整车操纵稳定性的影响,进行整车操纵稳定性6个性能试验的仿真分析.利用获取的动力学分析数据、仿真动画,实现汽车操纵稳定性虚拟试验演示系统. 4、陈黎卿, 王启瑞, et al. (2005). "基于ADAMS 的双横臂扭杆独立悬架操纵稳定性分析." 合肥工业大学学报: 自然科学版28(004): 341-345. 悬架的主要性能参数在悬架运动过程中的变化规律是影响悬架性能的主要因素。文章采用ADAMS软件建立了某商务车独立悬架的数学模型和仿真模型,分析了该悬架对操纵稳定性的影响,以及悬架主要性能参数的变化规律,为悬架设计奠定了基础。与传统的设计方法相比,这种方法提高了精度和效率。 5、邓亚东, 余路, et al. (2005). "ADAMS 在汽车操纵稳定性仿真分析中的运用." 武汉大学学报: 工学版38(002): 95-98. 利用ADAMS软件建立了某轿车的操纵动力学多体仿真模型,详细考虑了前后悬架系统、转向系统、轮胎以及各种连接件中的弹性衬套的影响,分析了汽车在方向盘转角阶跃输入时的转向特性.通过对不同车速、不同载荷下的仿真计算,得出汽车转向特性在这些条件下的不同表现,揭示了汽车转向特性与车速、载荷和轮胎的内在关系,为汽车操纵稳定性分析提供了参考. 6、董涵(2003). 侧风环境下高速汽车稳定性研究与分析[D], 长沙: 湖南大学. 随着汽车车速的不断提高,汽车侧风稳定性的研究日益重要。由于实车试验风险大、场地设备要求高,而使用计算机仿真则可以极大的的缩短产品开发周期。因而进行高速汽车侧风稳定性计算机仿真研究具有现实意义。在车辆动力学研究过程中,汽车数学模型的精确与否始终是一个关键问题。随着计算机技术的长足进步,以及多体系统动力学这一学科的成熟,汽车模型的自由度越来越多,仿真结果越来越精确。本文首先整理了汽车操纵稳定性的各项评价指标,根据汽车高速运动时的受力分析,使用非线性轮胎模型,建立了侧风环境下汽车运动十八自由度数学模型并进行了直线行驶运动仿真。
精品 实验题目控制系统的稳定性分析 一、实验目的 1.观察系统的不稳定现象。 2.研究系统开环增益和时间常数对稳定性的影响。 二、实验仪器 1.EL-AT-II型自动控制系统实验箱一台 2.计算机一台 三、系统模拟电路图 系统模拟电路图如图3-1 图3-1 系统模拟电路图R3=0~500K; C=1μf或C=0.1μf两种情况。 四、实验报告 1.根据所示模拟电路图,求出系统的传递函数表达式。 G(S)= K=R3/100K,T=CuF/10 2.绘制EWB图和Simulink仿真图。
精品 3.根据表中数据绘制响应曲线。 4.计算系统的临界放大系数,确定此时R3的值,并记录响应曲线。 系统响应曲线 实验曲线Matlab (或EWB)仿真 R3=100K = C=1UF 临界 稳定 (理论值 R3= 200K) C=1UF
精品 临界 稳定 (实测值 R3= 220K) C=1UF R3 =100K C= 0.1UF
精品 临界 稳定 (理论 值R3= 1100 K) C=0.1UF 临界稳定 (实测值 R3= 1110K ) C= 0.1UF
精品 实验和仿真结果 1.根据表格中所给数据分别进行实验箱、EWB或Simulink实验,并进行实验曲线对比,分析实验箱的实验曲线与仿真曲线差异的原因。 对比: 实验曲线中R3取实验值时更接近等幅振荡,而MATLAB仿真时R3取理论值更接近等幅振荡。 原因: MATLAB仿真没有误差,而实验时存在误差。 2.通过实验箱测定系统临界稳定增益,并与理论值及其仿真结果进行比较(1)当C=1uf,R3=200K(理论值)时,临界稳态增益K=2, 当C=1uf,R3=220K(实验值)时,临界稳态增益K=2.2,与理论值相近(2)当C=0.1uf,R3=1100K(理论值)时,临界稳态增益K=11 当C=0.1uf,R3=1110K(实验值)时,临界稳态增益K=11.1,与理论值相近 四、实验总结与思考 1.实验中出现的问题及解决办法 问题:系统传递函数曲线出现截止失真。 解决方法:调节R3。 2.本次实验的不足与改进 遇到问题时,没有冷静分析。考虑问题不够全面,只想到是实验箱线路的问题,而只是分模块连接电路。 改进:在实验老师的指导下,我们发现是R3的取值出现了问题,并及时解决,后续问题能够做到举一反三。 3.本次实验的体会 遇到问题时应该冷静下来,全面地分析问题。遇到无法独立解决的问题,要及时请教老师,
系统的稳定性 系统能在实际生活中应用的必要条件是系统要稳定。分析系统稳定性是经典控制理论的重要组成部分。经典控制理论对于判定一个线性定常系统是否稳定提供了多种方法。 一、系统稳定性的初步了解 了解不稳定现象发生的原因,对于建立系统的数学模型的建立稳定性概念是很有帮助的。线性系统的不稳定现象有如下几点值得注意。 首先,线性系统不稳定现象发生与否,取决于系统内部条件,而与输入无关。其次,系统发生不稳定现象必有适当的反馈作用。再次,控制理论中所讨论的稳定性其实都是指自由振荡下的稳定性,也就是说,是讨论输入为零,系统仅存在与有初始状态不为零时的稳定性,即讨论自由振荡是收敛的还是发散的,也可以说是讨论系统初始状态为零时,系统脉冲响应是收敛还是发散的。 二、稳定的定义和条件 若系统在初始状态下(不论是无输入时的初态,还是输入引起的初态,还是这两者之和)的影响下,由它所引起的系统的时间响应随着时间的推移,逐渐衰减并趋向于零(回到平衡位置),则称该系统为稳定的;反之,若在初始状态影响下,由它所引起的系统的时间随时间的推移而发散(即偏离平衡位置越来越远),则称系统为不稳定的。 系统稳定的充要条件为:系统的全部特性根都具有负实部;反正若特征根中只要有一个或一个以上具有正实部,则系统必不稳定。
三、关于稳定性的一些提法 1、李亚普诺夫意义下的稳定性 指对系统平衡状态为稳定或不稳定所规定的标准。主要涉及稳定、渐近稳定、大范围渐近稳定和不稳定。 ① 稳定 用 S(ε)表示状态空间中以原点为球心以ε为半径的一个球域,S(δ)表示另一个半径为δ的球域。如果对于任意选定的每一个域S(ε),必然存在相应的一个域S(δ),其中δ<ε,使得在所考虑的整个时间区间内,从域 S(δ)内任一点 x0出发的受扰运动φ(t;x0,t0)的轨线都不越出域S(ε),那么称原点平衡状态 xe=0是李雅普诺夫意义下稳定的。 ② 渐近稳定 如果原点平衡状态是李雅普诺夫意义下稳定的,而且在时间t趋于无穷大时受扰运动φ(t;x0,t0)收敛到平衡状态xe=0,且此过程中,都不脱离S(ε),则称系统平衡状态是渐近稳定的。从实用观点看,渐近稳定比稳定重要。在应用中,确定渐近稳定性的最大范围是十分必要的,它能决定受扰运动为渐近稳定前提下初始扰动x0的最大允许范围。 ③ 大范围渐近稳定
3.8 控制系统的稳定性 3.8 控制系统的稳定性 稳定性是控制系统最重要的特性之一。它表示了控制系统承受各种扰动,保持其预定工作状态的能力。不稳定的系统是无用的系统,只有稳定的系统才有可能获得实际应用。我们前几节讨论的控制系统动态特性,稳态特性分析计算方法,都是以系统稳定为前提的。 3.8.1 稳定性的定义 图3.26(a)是一个单摆的例子。在静止状态下,小球处于A位置。若用外力使小球偏离A而到达A’,就产生了位置偏差。考察外力去除后小球的运动,我们会发现,小球从初始偏差位置A',经过若干次摆动后,最终回到A点,恢复到静止状态。图3.26(b)是处于山顶的一个足球。足球在静止状态下处于B位置。如果我们用外力使足球偏离B位置,根据常识我们都知道,足球不可能再自动回到B位置。对于单摆,我们说A位置是小球的稳定位置,而对于足球来说,B则是不稳定的位置。 图 3.26 稳定位置和不稳定位置 (a)稳定位置;(b)不稳定位置 处于某平衡工作点的控制系统在扰动作用下会偏离其平衡状态,产生初始偏差。稳定性是指扰动消失后,控制系统由初始偏差回复到原平衡状态的性能。若能恢复到原平衡状态,我们说系统是稳定的。若偏离平衡状态的偏差越来越大,系统就是不稳定的。 在控制理论中,普遍采用了李雅普诺夫(Liapunov)提出的稳定性定义,内容如下: 设描述系统的状态方程为 (3.131)
式中x(t)为n维状态向量,f(x(t),t)是n维向量,它是各状态变量和时间t的函数。如果系统的某一状态,对所有时间t,都满足 (3.132) 则称为系统的平衡状态。是n维向量。当扰动使系统的平衡状态受到破坏时,系统就会偏离平衡状态,在时,产生初始状态=x。在时,如果对于任一实数,都存在另一实数,使得下列不等式成立 (3.133) (3.134) 则称系统的平衡状态为稳定的。 式中称为欧几里德范数,定义为: (3.135) 矢量的范数是n维空间长度概念的一般表示方法。 这个定义说明,在系统状态偏离平衡状态,产生初始状态以后,即以后,系统的状态将会随时间变化。对于给定的无论多么小的的球域S(),总存在另一个的球域,只要初始状态不超出球域,则系统的状态 的运动轨迹在后始终在球域S()内,系统称为稳定系统。 当t无限增长,如果满足: (3.136) 即系统状态最终回到了原来的平衡状态,我们称这样的系统是渐近稳定的。对于任意给定的正数,如果不存在另一个正数,即在球域内的初始状态,在后,的轨迹最终超越了球域S(),我们称这种系统是不稳定的。 图3.27是二阶系统关于李雅普诺夫稳定性定义的几何说明。
第5章定性和稳定性理论简介 在十九世纪中叶,通过Liouville等人的工作,人们已经知道绝大多数微分方程不能用初等积分法求解.这个结果对微分方程理论的发展产生了极大的影响,使微分方程的研究发生了一个转折.既然初等积分法有着不可克服的局限性,那么是否可以不求微分方程的解,而从微分方程本身来推断其性质呢?定性理论和稳定性理论正是在这种背景下发展起来的.前者由法国数学家Poincare(1854-1912)在19世纪80年代所创立,后者由俄国数学家Liapunov(1857-1918)在同年代所创立.它们共同的特点就是在不求出方程解的情况下,直接根据微分方程本身的结构与特点,来研究其解的性质.由于这种方法的有效性,近一百多年以来它们已经成为常微分方程发展的主流.本章对定性理论和稳定性理论的一些基本概念和基本方法作一简单介绍. 第一讲§5.1 稳定性(Stability)概念(5课时) 一、教学目的:理解稳定、渐近稳定和不稳定的概念;掌握零解的稳 定、渐近稳定的概念;学会判定一些简单微分方程零 解的稳定和渐近稳定性。 二、教学要求:理解稳定、渐近稳定和不稳定的概念;掌握简单微分 方程零解的稳定和渐近稳定性的判定。 三、教学重点:简单微分方程零解的稳定和渐近稳定性的判定。 四、教学难点:如何把一般解的稳定性转化为零解的稳定性。 五、教学方法:讲练结合教学法、提问式与启发式相结合教学法。 六、教学手段:传统板书与多媒体课件辅助教学相结合。 七、教学过程:
1.稳定性的定义 考虑微分方程组 (,)dx f t x dt = (5.1) 其中函数(,)f t x 对n x D R ∈?和(,)t ∈-∞+∞连续,对x 满足局部Lipschitz 条件。 设方程(5.1)对初值01(,)t x 存在唯一解01(,,)x t t x ?=,而其它解记作00(,,)x x t t x =。现在的问题是:当01x x -很小是,差0001(,,)(,,) x t t x t t x ?-的变化是否也很小?本章向量12(,,,)T n x x x x =L 的范数取12 21 n i i x x =??= ??? ∑。 如果所考虑的解的存在区间是有限区间,那么这是解对初值的连续依赖性,在第二章的定理2.7已有结论。现在要考虑的是解的存在区间是无穷区间,那么解对初值不一定有连续依赖性,这就产生了Liapunov 意义下的稳定性概念。 定义 5.1 如果对于任意给定的0ε>和00t ≥都存在0(,)0t δδε=>,使得只要01x x δ-<,就有0001(,,)(,,)x t t x t t x ?ε-< 对一切0t t ≥成立,则称(5.1)的解01(,,)x t t x ?=是稳定的。否则是不稳定的。 定义5.2 假定01(,,)x t t x ?=是稳定的,而且存在11(0)δδδ<≤,使得只要011x x δ-< ,就有 0001lim((,,)(,,))0t x t t x t t x ?→∞-= ,则称(5.1)的解01(,,)x t t x ?=是渐近稳定的。 为了简化讨论,通常把解01(,,)x t t x ?=的稳定性化成零解的稳定性问题.下面记00()(,,)x t x t t x =01()(,,)t t t x ??=作如下变量代换. 作如下变量代换.
汽车操纵稳定性试验解析! 汽车的操稳性不仅影响到汽车驾驶的操纵方面,而且也是决定汽车安全行驶的一个主要性能;为了保证安全行驶,汽车的操稳性受到汽车设计者很大的重视,成为现代汽车的重要使用性能之一,如何试验并评价汽车的操稳性显得极其重要。汽车操控稳定性分为两个方面:1、操控性: 指汽车能够确切的响应驾驶员转向指令的能力;2、稳定性:指汽车受到外界扰动(路面扰动或阵风扰动)后恢复原来运动状态的能力。一、常用试验仪器 1、陀螺仪:用于汽车运动状态下测动态参数,如汽车行进方位角,汽车横摆角速度,车身侧倾角及纵倾角等; 2、光束水准车轮定位仪:测车轮外倾角,主销内倾角,主销外倾角,车轮前束,车轮最大转角及转角差; 3、车辆动态测试仪:测汽车横摆角速度,车身侧倾角及纵倾角,汽车横向加速度与纵向加速度等运动参数; 4、力矩及转角仪:测转向盘转角或力矩; 5、五轮仪和磁带机等。二、试验分类三、稳态回转试验 01试验步骤 1、在试验场上,用明显的颜色画出半径为15m或20m的圆周; 2、接通仪器电源,使之加热到正常工作温度; 3、试验开始前,汽车应以侧向加速度为3m/s2的相应车速沿画定的
圆周行驶500m以使轮胎升温。4、以最低稳定速度沿所画圆周行驶,待安装于汽车纵向对称面上的车速传感器在半圈内都能对准地面所画的圆周时,固定转向盘不动,停车并开始记录,记下各变量的零线,然后,汽车起步,缓缓连续而均匀地加速(纵向加速度不超过0·25m/s2),直至汽车的侧向加速度达到6·5m/s2为止,记录整个过程。5、试验按向左转和右转两个方向进行,每个方向试验三次。每次试验开始时车身应处于正中央。 02评价条件 1、中性转向点侧向加速度值An:前后桥侧偏角之差与侧向加速度关系曲线上斜率为零的点的侧向加速度值,越大越好; 2、不足转向度:按前后桥侧偏角之差与侧向加速度关系曲线上侧向加速度2m/s2点的平均值计算,越小越好; 3、车厢侧倾度K:按车厢侧倾角与侧向加速度关系曲线上侧向加速度2m/s2点的平均斜率计算,越小越好。 转向特性曲线图四、转向回正试验 01试验步骤一)低速回正性能试验:1、在试验场地上用明显的颜色画出半径为15m的圆周。2、试验前试验汽车沿半径为15m的圆周、以侧向加速度达3m/ s 2 的相应车速,行 驶500m,使轮胎升温。3、接通仪器电源,使其达到正常工作温度。4、试验汽车直线行驶,记录各测量变量零线,然
汽车操控稳定性研究 一(车辆车身各部件对车辆操纵稳定性影响的研究 1. 电动助力转向系统对汽车操控稳定性的影响 在电动助力转向系统中引入横摆角速度反馈传感器 ,建立了包含电动助力转向系统的人 -车系统数学模型 ;经模拟仿真分析 ,表明该模型在 EPS中引入横摆角 速度负反馈可以显著改善前轮角阶跃输入下车辆的横摆角速度的瞬态响应 ;并且EPS助力矩响应曲线上升平稳缓慢 ,有利于汽车在低附着系数路面高速转向行驶时的操纵 ,从而提高汽车的行驶安全性。 1.1. 横摆角速度反馈 当汽车的运动进入失稳状态时 ,驾驶员很容易做出过度转向的车辆 ,可在 EPS 中引入一个负反馈 ,以降低系统的助力矩 ,削弱驾驶员快速改变前轮转向角的能力。 1.2. 仿真结果及结论 对于不引入反馈的系统 ,瞬态响应曲线的振荡幅度很大 ,收敛较慢 ,稳定性较差。引入反馈后 ,系统的超调量显著降低 ,并很快的趋于稳态值 ,但反应时间较前者增长。引入反馈后 (实线表示 )系统在横摆角速度出现剧烈振荡的阶段 ( t < 1 s)提供远小于常规系统 (虚线表示 )的助力矩。这样转向系能提供给驾驶员更多的“路感”,同时也使转向系变得较“迟钝”,削弱了驾驶员快速控制前轮转向的能力[ 6 ] ,防止因驾驶员 (错误的 )快速转向操纵而导致的系统不稳定。另外 ,带有反馈的系统提供的助力矩曲线很平滑 ,而不带反馈的系统却出现了一定的波动。抑制助力矩的波动不仅有利于保持车辆的稳定性 ,也有利于延长助力电机的寿命。 因此在 EPS引入横摆角速度反馈可以减少前轮阶跃输入车辆的横摆角速度瞬态响应的时间 ,显著降低超调量 ,可明显改善车辆的行驶稳定性 ,但会增长反应时间。为 EPS引入横摆角速度反馈后 , EPS系统的助力矩上升较慢 ,但增长平稳 ,
汽车电子控制技术汽车类专业应用型本科示范教材 机械工业出版社出版主编于京诺
第3章 汽车行驶稳定性控制系统 ?学习目标 ?·了解ABS、ASR的基础理论。 ?·了解ABS、ASR的组成和分类。 ?·掌握ABS的结构和工作原理。 ?·掌握ASR的结构和工作原理。 ?·了解ESP的功能。 ?·掌握ESP的结构和工作原理。
3.1 防抱死制动系统(ABS 3.1.1 概述 1.ABS 的基础理论 第3章 汽车行驶稳定性控制系统 (1)汽车制动时的附着条件 地面制动力只能小于或等于附着力: (3-1) 附着力正比于地面对车轮的法向反作用力F Z以及车轮与地面之间的附着系数,即 (3-2) 在地面对车轮的法向反作用力F Z一定的情况下,附着力的大小取决于附着系数。附着系数的大小与路面和轮胎的性质有关,还与车轮的滑移率有关。 ?F F X ≤??Z F F =
(3)附着系数与滑移率的关系 车轮与地面之间的附着系数会随着车轮滑移率的变化而变化,干燥硬实路面附着系数与滑移率的关系如图3-1所示。 开始时随着滑移率的增大, 纵向附着系数迅速增大,当滑 移率达到约20%时,纵向附着 系数达到最大值。当滑移率达 到100%,即车轮完全被抱死滑 移时,其附着系数称为滑动附 着系数。当滑移率为0时,横 向附着系数最大,随着滑移率 的增大,横向附着系数逐渐减 小,当滑移率达到100%时,横 向附着系数接近于零。 图3-1 干燥硬实路面附着系数与滑移率的关系
(4)汽车采用ABS的必要性 由附着系数与滑移率之间的关系可知,汽车制动时如果车轮完全抱死,就纵向附着系数而言,其滑动附着系数低于峰值附着系数,这将使车轮完全抱死时的制动距离比具有峰值附着系数时的制动距离变长;就横向附着系数而言,由于在车轮抱死时的横向附着系数接近于零,汽车几乎失去了横向附着能力,因此使汽车的方向稳定性变差,一旦汽车遇到横向干扰力的作用,就可能产生侧滑、甩尾甚至回转等情况。另外,一旦转向车轮抱死,汽车不会按照转向轮偏转的方向行驶,而是沿汽车行驶惯性力的方向向前滑动,从而使汽车失去转向控制能力。 综上所述,汽车制动时车轮抱死会使制动距离变长,方向稳定性变差,失去转向控制能力,因此制动时应避免车轮抱死。汽车上采用ABS的目的就是避免制动时车轮抱死,将滑移率控制在10%~30%,在此范围内既有最大的纵向附着系数,使制动距离最短,又有较大的横向附着系数,以获得较好的横向稳定性和转向控制能力。
客 车 技 术 与 研 究 第2期 BUS &COACH TECHNOLOGY AND RESEARCH No.2 2018 作者简介:来 飞(1983 ),男,博士;高级工程师;主要从事智能汽车及主动安全方面的测试研究工作三 重型汽车电子稳定性控制系统试验标准的对比分析 来 飞1,夏 钧2,刘昌仁1,曹 飞1,张仪栋1 (1.重庆车辆检测研究院国家客车质量监督检验中心,重庆 401122;2.重庆力帆乘用车有限公司,重庆 401122) 摘 要:对美标FMVSS 136和欧标ECE R 13中关于重型汽车电子稳定性控制系统的试验方法和性能评价进行对比分析,着重介绍美标FMVSS 136规定的试验方法和性能要求三关键词:重型汽车;电子稳定性控制;试验标准;对比分析中图分类号:U461.6 文献标志码:A 文章编号:1006-3331(2018)02-0059-04 Contrastive Analysis of Test Standards on Electronic Stability Control System for Heavy Vehicles Lai Fei 1,Xia Jun 2,Liu Changren 1,Cao Fei 1,Zhang Yidong 1 (1.Chongqing Vehicle Test &Research Institute,National Bus Quality Supervision and Inspection Center,Chongqing 401122,China;2.Chongqing Lifan Passenger Vehicle Co.,Ltd,Chongqing 401122,China) Abstract :The test method and performance evaluation on electronic stability control system for heavy vehi?cles are compared and analyzed between the FMVSS 136and the ECE R13.The test methods and perform?ance requirements prescribed by the FMVSS 136are emphatically introduced. Key words :heavy vehicle;electronic stability control (ESC);test standard;contrastive analysis 汽车电子稳定性控制(ESC)系统能显著减少车辆失稳及其引发的交通事故,在乘用车上已得到广泛应用三目前关于轻型汽车ESC 系统的性能要求及测试方法标准,欧洲和美国均早已发布并强制实施,我国也参照欧标制定了相应的推荐性标准[1]三与轻型汽车相比,重型汽车ESC 试验标准的研究较为迟缓, 原因在于相对乘用车而言,重型汽车ESC 的试验过程更加危险,此外,由于其整车质量变动范围更广,行驶条件更加恶劣,其评价指标的提出也更加困难[2]三 但由于重型汽车事故易造成群死群伤,世界各国对重型汽车的ESC 试验也较为重视[3-7]三目前,欧标ECE R13附录21提供了重型汽车ESC 测试的大致试验方法,但并未给出相应的性能评价指标;美标FMVSS 136则在大量试验的基础上,提出了具体的试验方法和性能评价指标,从2019年8月起对所有重型汽车强制实施[8-9]三我国JT /T 1094-2016[10]对重型营运客车也有相关要求,具体试验方法与美标FMVSS 136基本相同三 1 ECE R13和FMVSS 136试验方法对比 ECE R13和FMVSS 136对重型汽车ESC 系统在 试验方法上的对比如表1所示三其中,ECE R13附录21对重型汽车ESC 系统在方向控制和侧翻控制上分开考核,并有相关推荐的试验方法,但具体的试验过程并未详细规定,仅列出了可选择的试验测试方法,如在方向控制上只需选取8种方法中的1种进行,在侧翻控制上也只需选取2种方法中的1种进行三同时ECE R13规定也可采用仿真方式进行认证三FMVSS 136则对方向控制和侧翻控制一并考核,主要通过具体的J-转向试验来考核发动机扭矩减小性能和侧倾稳定性三值得注意的是,FMVSS 136中的J-转向试验与ECE R13中的J-转向试验有所不同,后者并没有对可供选择的试验方法进行具体规定,如不同企业在减小圆周半径试验过程中的试验车速二圆周半径的选取上都可能不完全一样三 J-转向试验为FMVSS 136中规定的基础试验,图1为其试验示意图三图中为逆时针布置,试验完毕 9 5