?基于matlab的三相三电平逆变器SVPWM算法?2010-11-11 10:00:00 来源:中国自动化网浏览:199 网友评论条点击查看摘要:本文介绍了二极管中点箝位式三电平电压型逆变器为主电路的逆变装置,详细分析了三相三电平逆变器SVPWM传统算法的原理,详细阐述了SVPWM波形发生的方法,在
Matlab/simulink里以三电平逆变器为对象进行了仿真分析。仿真结果与二电平进行了比较,结果证实了三电平控制方法的有效性和模型的正确性,为三电平逆变器的研究提供了一个有效的参考。
伴随着高速列车的引进,我国铁路事业进入了高速时代,其中对CRH2机车关键技术的研究已经有突破性进展。该车上的变频装置属于大容量、高电压变频装置,由于目前的单管容量以及传统的两电平的控制方式均无法满足应用要求,于是采用三电平控制器,三电平可以使开关器件承受的压降降低、改善输出波形的波形质量、减小逆变器和负载收到的冲击等优点,采用在高速列车动车组上。
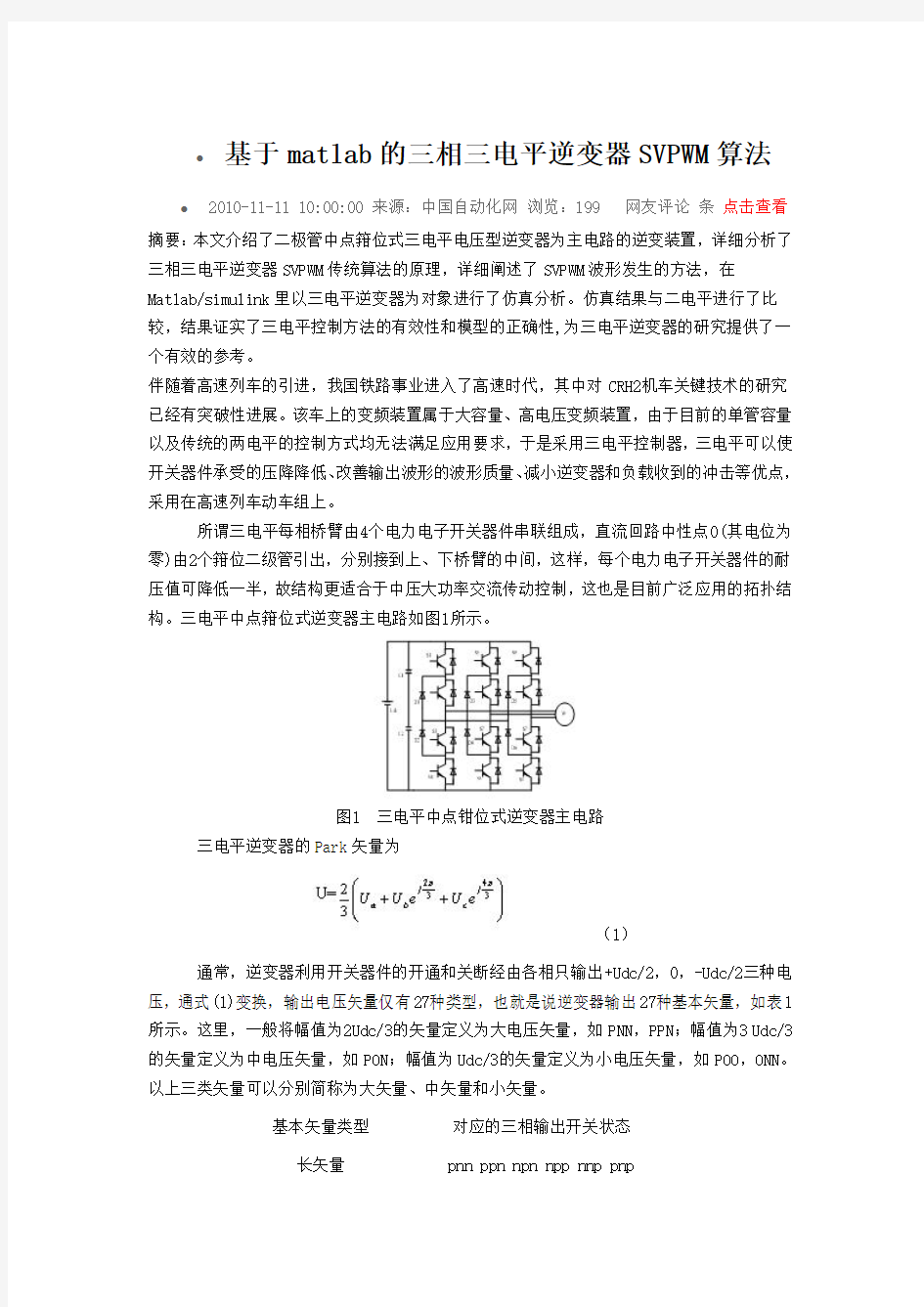
所谓三电平每相桥臂由4个电力电子开关器件串联组成,直流回路中性点0(其电位为零)由2个箝位二级管引出,分别接到上、下桥臂的中间,这样,每个电力电子开关器件的耐压值可降低一半,故结构更适合于中压大功率交流传动控制,这也是目前广泛应用的拓扑结构。三电平中点箝位式逆变器主电路如图1所示。
图1 三电平中点钳位式逆变器主电路
三电平逆变器的Park矢量为
(1)
通常,逆变器利用开关器件的开通和关断经由各相只输出+Udc/2,0,-Udc/2三种电压,通式(1)变换,输出电压矢量仅有27种类型,也就是说逆变器输出27种基本矢量,如表1所示。这里,一般将幅值为2Udc/3的矢量定义为大电压矢量,如PNN,PPN;幅值为3 Udc/3的矢量定义为中电压矢量,如PON;幅值为Udc/3的矢量定义为小电压矢量,如POO,ONN。以上三类矢量可以分别简称为大矢量、中矢量和小矢量。
基本矢量类型对应的三相输出开关状态
长矢量pnn ppn npn npp nnp pnp
中矢量Pop opn npo nop onp pno
短矢量Poo onn ppo oon opo non
Opp noo opp noo pop non
零矢量Ppp ooo nnn
表1 三电平矢量表
为了实现三电平逆变器的SVPWM控制,在每个采样周期内,应分为一下三个步骤: (l)区域判断。找出合成参考电压矢量的三个基本矢量。
(2)时间计算。确定三个基本矢量的作用时间,即每个矢量对应的占空比。
(3)时间状态分配。确定各个基本矢量对应的开关状态及作用次序,将基本矢量对应的作用时间分配给相应的开关状态,完成对开关器件的控制。
1、区域判断
传统算法根据三电平基本空间矢量图将整个矢量空间先分成6个大区域,再将每个大区域分成4个小区域。由于基本空间矢量中的短矢量在每个采样周期中出现的次数多,为了算法及仿真的准确性,本文将每个大区域细分成6个小区域。
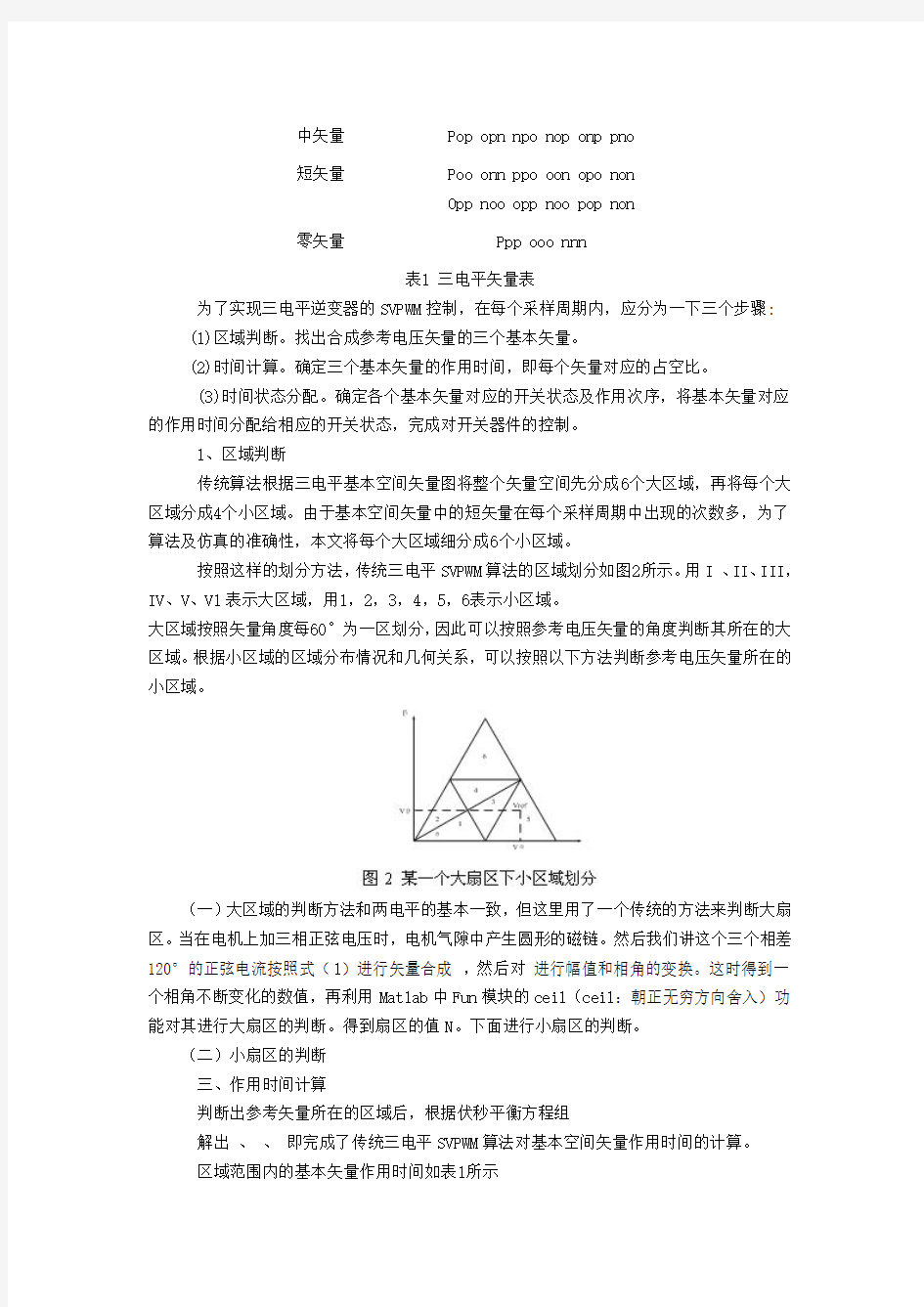
按照这样的划分方法,传统三电平SVPWM算法的区域划分如图2所示。用I 、II、III,IV、V、Vl表示大区域,用1,2,3,4,5,6表示小区域。
大区域按照矢量角度每60°为一区划分,因此可以按照参考电压矢量的角度判断其所在的大区域。根据小区域的区域分布情况和几何关系,可以按照以下方法判断参考电压矢量所在的小区域。
(一)大区域的判断方法和两电平的基本一致,但这里用了一个传统的方法来判断大扇区。当在电机上加三相正弦电压时,电机气隙中产生圆形的磁链。然后我们讲这个三个相差120°的正弦电流按照式(1)进行矢量合成,然后对进行幅值和相角的变换。这时得到一个相角不断变化的数值,再利用Matlab中Fun模块的ceil(ceil:朝正无穷方向舍入)功能对其进行大扇区的判断。得到扇区的值N。下面进行小扇区的判断。
(二)小扇区的判断
三、作用时间计算
判断出参考矢量所在的区域后,根据伏秒平衡方程组
解出、、即完成了传统三电平SVPWM算法对基本空间矢量作用时间的计算。
区域范围内的基本矢量作用时间如表1所示
解出、、即完成了传统三电平SVPWM算法对基本空间矢量作用时间的计算。
区域范围内的基本矢量作用时间如表1所示
表1 基本矢量作用时间表
跟据以上表格可以找到规律如下,大扇区一三五的作用时间的变化规律一样,大扇区二四六的作用时间的变化规律一样,就只分析大扇区一和二。这样可以得到作用时间、、,于是大扇区第二小扇区的作用时间只要调整下输出时间的顺序,即按上图将作用时间按顺序、、的顺序输出。同样原理,将其他扇区的仿真模型搭建出来,按照规律只讲输出的顺序调换一下就可以将作用时间构建出来。用同样的方法也可以讲第二大扇区的计算时间模块搭建出来。下一步的工作就是根据的扇区位置选择使用的作用时间,利用选择开关按照小扇区的作用顺序n在内部,大扇区的作用顺序N在外部的原则,选择整个区域的作用时间。
四、时间状态分配
时间状态分配的目的是确定各个基本矢量对应的开关状态及作用次序,将基本矢量对应的作用时间分配给相应的开关状态,生成主电路开关器件的触发波形,完成对开关器件的控制,是三电平SVPWM算法的关键部分。把负短矢量作为每个采样周期的起始矢量,实现七段式时间分配,每个区域的基本矢量作用时间是、、是按照以短矢量为每个采样周期起始矢量的次序排列的,因此所有区域的七段式时间分配是一样的,不同的是、、的值。所以每个区域都可以用相同的七段式时间分配仿真模块。
七段式仿真模块不是将作用时间与开关状态对应,而是通过时间叠加产生含有与矢量状态对应的时间信息的梯形波M,作为下一个矢量状态次序仿真模块的选择信号或分配信号。根据状态的作用次序原则,每个采样周期以负短矢量作为起始矢量,以0,1,2表示矢量状态n,o,p,则表2为矢量状态次序仿真数据表中扇区一和二的次序。
表2 大扇区一和二的矢量状态次序表
区域矢量状态次序
Ⅰ1100 110 111 211 111 110 100
Ⅰ2110 111 211 221 211 111 110
Ⅰ3100 110 210 211 210 110 100
Ⅰ4110 210 211 221 211 210 110
Ⅰ5100 210 211 221 210 200 100
Ⅰ6110 200 210 211 210 200 100
Ⅱ1110 111 121 221 121 111 110
Ⅱ2010 110 111 121 111 110 010
Ⅱ3110 120 121 221 121 120 110
Ⅱ4010 110 120 121 120 110 010
Ⅱ5110 120 220 221 220 120 110
Ⅱ6010 020 120 121 120 020 010
矢量状态次序仿真模块是层层包含,逐层深入的结构,从里向外第一层是小区矢量状态次序,第二层是大区内的小区选择,第三层是整个区域的矢量状态次序,模型特点是大量使用SIMULINK的多路选择开关器件排列矢量状态次序和判断所在区域最后进行状态的转换总结以上仿真模型,我们可以很得到总的仿真模型如下
仿真结果
加入三电平逆变桥和永磁同步电动机后,测得输出线电压波形如下所示。同步电机参数如下:Rs=18.7,Ld=0.02682H,Lq=0.02682H,J=2.26e-5Kg.m^2,F=1.349e-5N.m.s,p=2,负载
在t=0.04s时加入转矩T=0.5。为了与两电平带永磁同步电机的输出特性曲线相比较,加入两电平输出特性曲线如下,电机参数不变。仿真波形如下:
1、线电压区别
2、带负载后转矩区别
注:三电平的转矩脉动明显比两电平的要小
3、THD含量
结论:
在该论文中用仿真软件完成了两电平电路于三电平电路进行比较,并分别引入永磁同步电机,仿真比较结果如下:1、三电平的电磁转矩带有更少的脉动、2作用时间更快 3、三电平加入的直流电压的比两电平的小了一倍 4、三电平输出的功率大,可以使电动机更快的达到额定转速。最后使用Powergui进行了FFt分析,三电平的THD明显下降比两电平的要小,说明谐波含量降低。
SVPWM
为了能让大家在已经泛滥的知识上少走弯路,本人把自己在SVPWM上的认识与看到此贴的读者们一起分享,废话少说,切入正题:在看下面内容之前,您应该至少对SVPWM的原理有大致的了解,如果不了解也没关系,你只要按照我交给你的步骤来做,也可以轻而易举的跨过SVPWM这道坎,在仿真之前您必须安装MATLAB7.0或以上版本,必须确保simpowersysm工具箱已被安装,如果以上要求已经达到,那么就可以执行以下步骤了:步骤1:打开matlab主界面,然后在command window界面中的“>>”旁边输入simulink,打开simulink开发环境后新建一个mdl文件,在simulink下拉菜单中的ports&subsystems 中找到subsystem模块,用其建立一个如图1的总的模块,这个模块有两个输入口,一个输出口(实际上包含六路PWM信号),接来的东西都将在这个模块中添加,输入输出模块的名称可以在双击模块后自己更改,其中Vahar,Vbetar是需要输出的电压在两相静止坐标系下的两个分量,输出是控制逆变器六个IGBT的pwm脉冲信号。
图1
也许有人会问,输入参数不是还包括直流电压和功率开关频率吗?别急,下面接着让您看到上述模块的内部情况
步骤2:根据图2,添加subsystem的内核模块,里面用到的模块有以下几种:in,out,mux,demux,repeating sequence,rational operator,logical operator和里面的主角S-Function builder模块。
图2
可以看到输入有四个参数Vapha,Vbeta,Tz,Vdc,输出为六路PWM信号,这个仿真模块没考虑死区的问题;
取Tz为1/(1e+4)这就是说开个频率是10kHz,Vdc为500,这两个参数要根据实际情况自己设置,这里是我任意设的,repeating sequence的设置如图3所示,这样设的目的是想产生一个周期为Tz,峰值为Tz/2的等腰直角三角形调制波,接下来设置两个比较模块和取反模块,比较模块是大于等于关系,各模块的其他参数,我没说的就当默认设置,细心的读者会在图4中的第一幅图中看到仿真时间设为Ts,这是我设的系统仿真步长,这里就用默认值-1,此外比较模块和取反模块的信号属性signal atrributes均应设为Boolean格式。
图3
图4
步骤3:设置s-builder模块,这个设置也很简单,但是看起来有点多,图2中的svpwm模块就是用simulink中的s-function builder建立的,只是名字改成svpwm罢了,有图2可以看出svpwm产生的三个时间比较值与repeating sequence产生的等腰三角波进行比较,从而产生想要的六路PWM波,svpwm的核心算法是使用C语言编写的,下面详细介绍该模块的设置,s-fanction builder的界面如下图:
图5
在s-function name 中输入svpwm,如果你把我下面说的设置完后,再按一下s-function name旁边的build,接着就会在matlab的显示路径文件夹中(如“我的文档/matlab”)产生几个格式各异的以svpwm开头的文件,如svpwm.c,svpwm.tlc等,不过这是后话,先说说设置,在initialization中的各参数均设为0,sample mode 设为inherited,如图5所示,这些都是默认值,也是说可以不用管它就可以了,在data properties中设:
图6
port name 为u (默认是u0),行数row为4(因为有四个输入参数),其他选用默认值,如图6所示,设output ports的输出port name为y(原来为y0),行数rows为3(因为有三个输出),其他参数默认,剩下的两个parameters和data type attributes均采用默认值;在libraries中全部使用默认值;接下来要改的就是outputs中的内容,也是实现SVPWM的核心算法,必须注意要必须勾选inputs are needed in the output function(direct feedthrough),这句话的意思是:输出结果直接用到了输入数据,比如y=u+1,将下面给出的C语言程序复制到空白处,如图7所示:
图7
/*u[4]={vaphar,vbetar,Tz,Vdc}*/
int A,B,C,N;
double X,Y,Z,Tx,Ty,T0,Tl,Tm,Th;
if (u[1]>0) A = 1;
else A=0;
if ((1.732051*u[0]-u[1])>0) B = 1; else B=0;
if ((-1.732051*u[0]-u[1])>0) C = 1; else C=0;
N=A+2*B+4*C;
X=1.732051*u[1]*u[2]/u[3];
Y=(0.8660*u[1]+1.5*u[0])*u[2]/u[3]; Z=(-0.8660*u[1]+1.5*u[0])*u[2]/u[3]; switch (N)
{
case 1: Tx= Y;Ty=-Z;break;
case 2: Tx=-X;Ty= Y;break;
case 3: Tx= Z;Ty= X;break;
case 4: Tx=-Z;Ty=-X;break;
case 5: Tx= X;Ty=-Y;break;
default: Tx=-Y;Ty= Z;
}
if ((Tx+Ty)>u[2])
{
Tx=Tx*u[2]/(Tx+Ty);
Ty=Ty*u[2]/(Tx+Ty);
}
T0=(u[2]-(Tx+Ty))/4;
Tl=(u[2]+Tx-Ty)/4;/*Tl=T0/4+Tx/2*/
Tm=(u[2]-Tx+Ty)/4;/*Tm=T0/4+Ty/2*/
Th=(u[2]+Tx+Ty)/4;/*Th=T0/4+Ty/2+Ty/2*/
switch (N)
{
case 1 :y[0]=Tm;y[1]=T0;y[2]=Th;break;
case 2 :y[0]=T0;y[1]=Th;y[2]=Tm;break;
case 3 :y[0]=T0;y[1]=Tl;y[2]=Th;break;
case 4 :y[0]=Th;y[1]=Tm;y[2]=T0;break;
case 5 :y[0]=Th;y[1]=T0;y[2]=Tl;break;
default :y[0]=Tl;y[1]=Th;y[2]=T0;
}
接下来的两个continuous derivatives和discrete update都不用改,使用默认值,这两个只有在有导数时才会用到,最后一个在build info中勾选show comlile steps(在build时会显示编译过程)、create a debugged mex-file和generate wrapper tlc(这个我也不知道干什么用的)。这下所有的细节设置都结束了,
步骤4:设置仿真参数,回到mdl主界面,选择菜单栏中的simulation/configurate parameters,里面的仿真时间可以根据实际情况自己定,在sover options中,type建议选fixed-step,fixed step size应本人设为5e-6,这个参数是仿真时最小的步长,这个参数必须比开关周期Tz小,否则无法仿真,其他参数都不用管它,要想知道这些参数是什么意思,就多看看matlab 中的help,里面都有详细说明。
步骤5是安装lcc,在matlab的command window中输入mex -setup,然后按照提示将LCC 安装上,安装完毕的提示是done。。。,接下来你就可以做跟你有用有关的事了,把SVPWM 当做一个模块了使用。
步骤6:打开s-function builder,单击一下里面的build,接着您就可以看到编译过程,如果看到success,那就说明您已经成功了。编译完后关闭s-function builder,接下来做你的系统仿真吧,只要您的svpwm模块和编译出来的svpwm.c放在一个文件夹中,以后仿真就不用再点build了。
很简单吧,其实SVPWM的仿真没什么难的!需要提醒同志们的是,在仿真之前必须build 一下s-function builder,不然无法运行模块,采用s-builder的原因是建成的模块很简洁,而且运行速度要比其他方法快的多,接下来同志们该去自己试一下了!
那个out value值一定要这么设置吗?我看别的没按这个来设置。。初学matlab,请
多指教。
?回复ruguoshuo1234:在这个例子中repeating sequence的作用是产生一个对称三角波,三角波的周期是Tz,最高幅值是Tz/2,所以必须这么设置,这里用的svpwm是七段式算法。
?为什么我的一build就卡在那里呢?初始值也没办法设置
?回复hjllizi:在s-function name 栏中输入SVPWM
在build info中的build options中勾选show...,generate.....,create a .... 。
continuous derivative、libraries和Discrete update中为空
在data properties中的port name中输入u,rows中输入4,outports中的port name为y,rows 为3
在initialization中的s-function settings中的参数均设为0
在build之前在command windows中输入以下命令mex -setup,用来安装c语言的编译器:LCC
注意在OUTPUTS中应该勾选inputs are needed in the output of function(direct feedthrough) 这些仔细核对后再build一下,我重新试了一下,按照我说的做是可以实现
?我试了下还是不行啊-> Default options filename found in C:\Documents and Settings\Administrator\Application ,你用的是什么版本的,我用的是7.0的,能否加你QQ,我的QQ125469570。
?直接用m文件的话程序要怎么改呢?谢谢
?回复匿名网友:我用m文件做过,感觉没s-bulder好,我觉得你只要学会用s-bulder 了,其他应该非常简单,毕竟C语言大部分都学过,不过如果真想用M文件写,那我提个大概思路,你做一下试试:
1. 用一个叫MA TLAB FCN 的模块代替我上面第二幅图中的svpwm;
2. 在m文件里定义一个函数,输入参数四个,输出参数三个
3. 将是上面给出的C语言程序用MA TLAB语言重新编写一下,这个应该很容易的
4.将函数名写入MA TLAB FCN中
或者直接用S-函数编写,但是你必须熟悉s函数模板sfuntmpl. m,可以找相关书籍看一下,也是一样,输入参数四个,输出参数三个,S-FUNCTION和s-builder是相通的,只不过使用的语言不同,而且使用的难易程度也差不多,甚至s-builder更容易,所以用S-function还不如用S-builder
?非常感谢!输入参数是哪四个呢?三相正弦电压,还有?还有就是我找不到一个表示输出的切入点,因为开关作用时间我不知道要放到哪个里面去。
能给我讲下吗?谢谢!因为我不能采用模块,只能用用程序来实现
?回复匿名网友:请仔细看上文中步骤2中的第一幅图,输入svpwm模块中有四个参数,只要安装了MA TLAB就可以用模块实现撒,s函数里用的就是MATLAB语言,只不过做成模块形式了,模块的作用就是将函数用可视化的方法表示出来,用起来很方便,全部用程序实现,要涉及到很多MA TLAB自带的函数和编程语法,这个我没做过,不好意思,帮不了你了!
?还是非常感谢
?大侠你好,我搞了半天也没搞出来,可不可以给我发一份,现在也连保存都不行了,一运行就说我的SVPWM不存在。或者上传上来给大家分享一下!感激不尽!?回复jianmingqz:大概是我写的还不够详细,所以接下来我会对文章在做些改动,
力争浅显易懂,你的问题可能是路径不对引起的,打开matlab时会显示一个路径,如果你在安装时不另外指定,一般会在“我的文档”中出现一个MA TLAB文件夹,以后你所创建的文件一般都会保存在那里,如果你把文件另保存在其他盘中,重新打开运行时有可能会提示你路径方面的问题,所以做仿真时,最好把所有的文件都放在一个路径当中,省的到处转,很麻烦!另外,你在对S-builder进行build时,产生的matlab可以执行的文件一定要跟你的*.mdl放在一个文件夹中,这个可能是出现找不到SVPWM的原因?是用mux,demux么?这个和bus selector ,bus creator有什么不同啊?我看有人好像用的是后者啊?
谢谢了
?回复_阿君:是mux和demux,每个模块都有帮助功能,希望你自己去琢磨一下,后两个我用的不多,所以也不大了解
所谓三电平是指逆变器交流侧每相输出电压相对于直流侧有三种取值,正端电压(+Vdc/2)、负端电压(-Vdc/2)、中点零电压(0)。二极管箱位型三电平逆变器主电路结构如图所示。逆变器每一相需要4个IGBT开关管、4个续流二极管、2个箱位二极管;整个三相逆变器直流侧由两个电容C1、C2串联起来来支撑并均衡直流侧电压,C1=C2。通过一定的开关逻辑控制,交流侧产生三种电平的相电压,在输出端合成正弦波。 三电平逆变器的工作原理 以输出电压A相为例,分析三电平逆变器主电路工作原理,并假设器件为理想器件,不计其导通管压降。定义负载电流由逆变器流向电机或其它负载时的方向为正方向。 (l) 当Sa1,、Sa2导通,Sa3、Sa4关断时,若负载电流为正方向,则电源对电容C1充电,电流从正极点流过主开关Sa1、Sa2,该相输出端电位等同于正极点电位,输出电压U=+V dc/2; 若负载电流为负方向,则电流流过与主开关管Sa1、Sa2反并联的续流二极管对电容C1充电,电流注入正极点,该相输出端电位仍然等同于正极点电位,输出电压U=+V dc/2。通常标识为所谓的“1”状态,如图所示。
“1”状态“0”状态 “-1”状态 (2) 当Sa2、Sa3导通,Sa1、Sa4关断时,若负载电流为正方向,则电源对电容C1充电,电流 从O点顺序流过箱位二极管D a1,主开关管Sa2:,该相输出端电位等同与0点电位,输出电压U=O;若负载电流为负方向,则电流顺序流过主开关管Sa3和箱位二极管D a2,电流注入O点,该相输出端电位等同于O点电位,输出电压U=0,电源对电容C2充电。即通常标识的“0”状态,如图所示。
三电平逆变器的主电路结构及其工作原理 所谓三电平是指逆变器交流侧每相输出电压相对于直流侧有三种取值,正端电压(+Vdc/2)、负端电压(-Vdc/2)、中点零电压(0)。二极管箱位型三电平逆变器主电路结构如图所示。逆变器每一相需要4个IGBT开关管、4个续流二极管、2个箱位二极管;整个三相逆变器直流侧由两个电容C1、C2串联起来来支撑并均衡直流侧电压,C1=C2。通过一定的开关逻辑控制,交流侧产生三种电平的相电压,在输出端合成正弦波。 三电平逆变器的工作原理 以输出电压A相为例,分析三电平逆变器主电路工作原理,并假设器件为理想器件,不计其导通管压降。定义负载电流由逆变器流向电机或其它负载时的方向为正方向。 (l) 当Sa1,、Sa2导通,Sa3、Sa4关断时,若负载电流为正方向,则电源对电容C1充电,电流从正极点流过主开关Sa1、Sa2,该相输出端电位等同于正极点电位,输出电压U=+V dc/2; 若负载电流为负方向,则电流流过与主开关管Sa1、Sa2反并联的续流二极管对电容C1充电,电流注入正极点,该相输出端电位仍然等同于正极点电位,输出电压U=+V dc/2。通常标识为所谓的“1”状态,如图所示。
“1”状态“0”状态 “-1”状态 (2) 当Sa2、Sa3导通,Sa1、Sa4关断时,若负载电流为正方向,则电源对电容C1充电,电流 从O点顺序流过箱位二极管D a1,主开关管Sa2:,该相输出端电位等同与0点电位,输出电压U=O;若负载电流为负方向,则电流顺序流过主开关管Sa3和箱位二极管D a2,电流注入O点,该相输出端电位等同于O点电位,输出电压U=0,电源对电容C2充电。即通常标识的“0”状态,如图所示。 (3) 当Sa3、Sa4导通,Sa1、Sa2关断时,若负载电流为正方向,则电流从负极点流过与主开 关Sa3、Sa4反并联的续流二极管对电容C2进行充电,该相输出端电位等同于负极点电位,输出电压U=-V dc/2;若负载电流为负方向,则电源对电容C2充电,电流流过主开关管Sa3、Sa4注入负极点,该相输出端电位仍然等同于负极点电位,输出电压U=-V dc/2。通常标识为“-1”状态,如图所示。
收稿日期:2004-02-24 作者简介:陶生桂(1940-),男,江苏常熟人,教授,博士生导师.E 2mail :hb9139@https://www.doczj.com/doc/6b11355425.html, 三电平逆变器中点电位平衡 电路的设计与仿真 陶生桂,龚熙国,袁登科 (同济大学沪西校区电气工程系,上海 200331) 摘要:多电平逆变器在中高压大功率场合得到了广泛的研究和应用.二极管中点箝位三电平逆变器是一种简单实用的多电平逆变器,但是三电平逆变器直流侧中点电位偏移问题影响着逆变器及其电机调速系统的可靠性.为此提出了一种用于三电平逆变器中点电位平衡的硬件电路,详细介绍了其工作原理以及参数设定,并用Matlab/ Simulink 仿真工具对系统进行了研究,给出了较好的仿真结果. 关键词:三电平逆变器;中点电位平衡;二极管箝位 中图分类号:TM 464 文献标识码:A 文章编号:0253-374X (2005)03-0395-05 Design and Simulation of Novel Circuit for Neutral 2Point Voltage Balance in Three 2Level Inverter TA O S heng 2gui ,GON G Xi 2guo ,Y UA N Deng 2ke (Department of Electrical Engineering ,Tongji University West Campus ,Shanghai 200331,China ) Abstract :The multilevel inverter has been studied and used widely in high power applications for medium or high voltage.Diode 2clamped three 2level inverter is a simple and practical kind of inverter.But the deviation of neutral point voltage is one of the key aspects that affects the reliability of the three 2level inverter and its electric drive system.This paper presents a novel circuit for neutral 2point voltage balance in the three 2level inverter.The operation principle and parameters setting are analyzed in detail.Simulation results based on Matlab/Simulink are supplied to confirm the validity of the pro 2posed circuit. Key words :three 2level inverter ;neutral 2point voltage balancing ;diode 2clamped 近几年来,多电平逆变器成为人们研究的热点课题.三电平逆变器是多电平逆变器中最简单又最实用的一种电路.三电平逆变器与传统的两电平逆变器相比较,主要优点是:器件具有2倍的正向阻断电压能力,并能减少谐波和降低开关频率,从而使系统损耗减小,使低压开关器件可以应用于高压变换器中[1].但是三电平逆变器控制策略复杂,并要考 虑中点电位平衡的问题.若逆变器直流母线上串联的2个电容的中点电压出现偏移,将引起三电平逆变器输出电压波形发生畸变而增大谐波及损耗[2].抑制三电平逆变器中点电位偏移的方法有硬件和软件两类.从软件出发将会增加控制的复杂性.笔者提出了一种抑制三电平逆变器中点电位偏移的硬件电路的实现方法.详细介绍了其工作原理和电路设计, 第33卷第3期2005年3月 同济大学学报(自然科学版) JOURNAL OF TON G J I UN IVERSITY (NATURAL SCIENCE )Vol.33No.3 Mar.2005
基于 matlab 的三相三电平逆变器 SVPWM 算法
2010-11-8 19:51:00 来源:作者:
摘要: 摘要:本文介绍了二极管中点箝位式三电平电压型逆变器为主电路的逆变装置, 详细分析了三相三电平逆变器 SVPWM 传统算法的原理,详细阐述了 SVPWM 波形 发生的方法, Matlab/simulink 里以三电平逆变器为对象进行了仿真分析。 在 仿真结果 与二电平进行了比较,结果证实了三电平控制方法的有效性和模型的正确性,为三电 平逆变器的研究提供了一个有效的参考。 伴随着高速列车的引进,我国铁路事业进入了高速时代,其中对 CRH2 机车关键技术 的研究已经有突破性进展。该车上的变频装置属于大容量、高电压变频装置,由于目 前的单管容量以及传统的两电平的控制方式均无法满足应用要求, 于是采用三电平控 制器,三电平可以使开关器件承受的压降降低、改善输出波形的波形质量、减小逆变 器和负载收到的冲击等优点,采用在高速列车动车组上。 所谓三电平每相桥臂由 4 个电力电子开关器件串联组成, 直流回路中性点 0(其电位为 零)由 2 个箝位二级管引出,分别接到上、下桥臂的中间,这样,每个电力电子开关 器件的耐压值可降低一半,故结构更适合于中压大功率交流传动控制,这也是目前广 泛应用的拓扑结构。三电平中点箝位式逆变器主电路如图 1 所示。
图 1 三电平中点钳位式逆变器主电路 三电平逆变器的 Park 矢量为
(1) 通常,逆变器利用开关器件的开通和关断经由各相只输出+Udc/2,0,-Udc/2 三种电 压, 通式(1)变换, 输出电压矢量仅有 27 种类型, 也就是说逆变器输出 27 种基本矢量, 如表 1 所示。这里,一般将幅值为 2Udc/3 的矢量定义为大电压矢量,如 PNN,PPN; 幅值为 3 Udc/3 的矢量定义为中电压矢量,如 PON;幅值为 Udc/3 的矢量定义为小电 压矢量,如 POO,ONN。以上三类矢量可以分别简称为大矢量、中矢量和小矢量。
基本矢量类型 长矢量 中矢量 短矢量 对应的三相输出开关状态 pnn ppn npn npp nnp pnp Pop opn npo nop onp pno Poo onn ppo oon opo non Opp noo opp noo pop non
[三电平逆变器的主电路结构及其工作原理]三电平逆变器 工作原理 三电平逆变器的主电路结构及其原理 所谓三电平是指逆变器侧每相输出电压相对于直流侧有三种取值,正端电压(+Vdc/2)、负端电压(-Vdc/2)、中点零电压(0)。二极管箱 位型三电平逆变器主电路结构如图所示。逆变器每一相需要4个IGBT 开关管、4个续流二极管、2个箱位二极管;整个三相逆变器直流侧由两个电容C1、C2串联起来来支撑并均衡直流侧电压,C1=C2。通过一定的开关逻辑控制,交流侧产生三种电平的相电压,在输出端合成正弦波。 三电平逆变器的工作原理 以输出电压A相为例,分析三电平逆变器主电路工作原理,并假 设器件为理想器件,不计其导通管压降。定义负载电流由逆变器流向电机或其它负载时的方向为正方向。 (l) 当Sa1、Sa2导通,Sa3、Sa4关断时,若负载电流为正方向,则电源对电容C1充电,电流从正极点流过主开关Sa1、Sa2,该相输出端电位等同于正极点电位,输出电压U=+Vdc/2;若负载电流为负方向,则电流流过与主开关管Sa1、Sa2反并联的续流二极管对电容C1
充电,电流注入正极点,该相输出端电位仍然等同于正极点电位,输出电压U=+Vdc/2。通常标识为所谓的“1”状态,如图所示。 “1”状态“0”状态 “-1”状态 (2) 当Sa2、Sa3导通,Sa1、Sa4关断时,若负载电流为正方向,则电源对电容C1充电,电流从O点顺序流过箱位二极管Da1,主开关管Sa2:,该相输出端电位等同与0点电位,输出电压U=O;若负载电流为负方向,则电流顺序流过主开关管Sa3和箱位二极管Da2,电流注入O点,该相输出端电位等同于O点电位,输出电压U=0,电源对电容C2充电。即通常标识的“0”状态,如图所示。 (3) 当Sa3、Sa4导通,Sa1、Sa2关断时,若负载电流为正方向,则电流从负极点流过与主开关Sa3、Sa4反并联的续流二极管对电容C2进行充电,该相输出端电位等同于负极点电位,输出电压U=-Vdc/2;若负载电流为负方向,则电源对电容C2充电,电流流过主开关管Sa3、Sa4注入负极点,该相输出端电位仍然等同于负极点电位,输出电压U=-Vdc/2。通常标识为“-1”状态,如图所示。 三电平逆变器工作状态间的转换
毕业设计(论文)开题报告题目:三电平逆变器硬件电路设计与仿真 院(系)电信学院 专业电气工程及其自动化 班级050413 姓名张天东 学号050413124 导师毕雪芹 2009年3 月5 日
毕业设计(论文)开题报告
参考文献 [1] 张杰,邹云屏,张贤,丁凯.二极管箝位式三电平控制策略研究[D].武汉:华中科技大 学,2002. [2] Yo-Han Lee, et al. A Novel PWM Scheme for a Three-Level V oltage Source Inverter with GTO Thyristors[J] IEEE Transactions on Industry Applications, V ol. 32, No.2, March/April. 1996 [3] 刘凤君正弦波逆变器[M]. 北京:科学出版社,2002 [4] 倪红基于SVPWM的中频变频器的研究[D].上海:东华大学,2000.
[5] 王长兵三电平逆变器SVPWM控制算法的研究[D].哈尔滨: 哈尔滨工业大学,2002 [6] 易荣, 吴浩烈.三电平逆变器异步电机空间矢量控制技术与仿真研究[A]. [7] 吴守箴,臧英杰.电气传动的脉宽调制控制技术[M].北京:机械工业出版社,1998 [8] 李夙. 异步电机直接转矩控制技术[M]. 北京:机械工业出版社,1998 [9] 钟彦儒,高永军,曾光采用空间电压矢量PWM方法三电平逆变器研究[J].电力电子技术,2000,1:10-13 [10] Fei Wang, et al. Sine-Triangle versus Space-Vector Modulation for Three-Level PWM V oltage-Source Inverters[J] IEEE Transactions on Industry Application, V ol.38, No.2, March/April. 2002 [11] https://www.doczj.com/doc/6b11355425.html,/matlabintro.htm [12] https://www.doczj.com/doc/6b11355425.html,/ruanjian/ruanjian000001.html [13] 胡兵三电平逆变器中点控制策略的研究[D].上海:同济大学,2002. [14] 康劲松三电平逆变器交流传动系统及其控制策略[D].上海:同济大学,2003.
三电平逆变器的主电路结构 及其工作原理 -标准化文件发布号:(9556-EUATWK-MWUB-WUNN-INNUL-DDQTY-KII
三电平逆变器的主电路结构及其工作原理 所谓三电平是指逆变器交流侧每相输出电压相对于直流侧有三种取值,正端电压 (+Vdc/2)、负端电压(-Vdc/2)、中点零电压(0)。二极管箱位型三电平逆变器主电路结构如图所示。逆变器每一相需要4个IGBT开关管、4个续流二极管、2个箱位二极管;整个三相逆变器直流侧由两个电容C1、C2串联起来来支撑并均衡直流侧电压,C1=C2。通过一定的开关逻辑控制,交流侧产生三种电平的相电压,在输出端合成正弦波。 三电平逆变器的工作原理 以输出电压A相为例,分析三电平逆变器主电路工作原理,并假设器件为理想器件,不计其导通管压降。定义负载电流由逆变器流向电机或其它负载时的方向为正方向。 (l) 当Sa1,、Sa2导通,Sa3、Sa4关断时,若负载电流为正方向,则电源对电容C1充电,电流从正极点流过主开关Sa1、Sa2,该相输出端电位等同于正极点电位,输出电压 U=+V dc/2;若负载电流为负方向,则电流流过与主开关管Sa1、Sa2反并联的续流二极管对电容C1充电,电流注入正极点,该相输出端电位仍然等同于正极点电位,输出电压U=+V dc/2。通常标识为所谓的“1”状态,如图所示。
“1”状态“0”状态 “-1”状态 (2) 当Sa2、Sa3导通,Sa1、Sa4关断时,若负载电流为正方向,则电源对电容C1充电,电流 从O点顺序流过箱位二极管D a1,主开关管Sa2:,该相输出端电位等同与0点电位,输出电压U=O;若负载电流为负方向,则电流顺序流过主开关管Sa3和箱位二极管D a2,电流注入O点,该相输出端电位等同于O点电位,输出电压U=0,电源对电容C2充电。即通常标识的“0”状态,如图所示。 (3) 当Sa3、Sa4导通,Sa1、Sa2关断时,若负载电流为正方向,则电流从负极点流过与主开 关Sa3、Sa4反并联的续流二极管对电容C2进行充电,该相输出端电位等同于负极点电位,输出电压U=-V dc/2;若负载电流为负方向,则电源对电容C2充电,电流流过主开关管Sa3、Sa4注入负极点,该相输出端电位仍然等同于负极点电位,输出电压U=-V dc/2。通常标识为“-1”状态,如图所示。
三电平光伏并网逆变器共模电压SVPWM抑制策略研究 发布:2011-09-07 | 作者: | 来源: mahuaxiao | 查看:436次 | 用户关注: 摘要:本文提出了一种优化空间矢量脉宽调制方法来抑制光伏并网逆变器中产生的共模电压。在分析共模电压产生机理的基础上,对通常SVPWM调制技术进行改进,调整了有效矢量的选择范围,并对开关次序进行优化。该空间矢量合成算法克服了SPWM调制存在的母线电压利用率低,线性调制区小的问题。仿真结果表明,该算法可以将共模电压幅值抑制到普通SVPWM算法的1/2,具有良好的有效性和实用性。1引言目前,多电平变流器以其突出的优点在高压大 摘要:本文提出了一种优化空间矢量脉宽调制方法来抑制光伏并网逆变器中产生的共模电压。在分析共模电压产生机理的基础上,对通常SVPWM调制技术进行改进, 调整了有效矢量的选择范围, 并对开关次序进行优化。该空间矢量合成算法克服了SPWM调制存在的母线电压利用率低,线性调制区小的问题。仿真结果表明,该算法可以将共模电压幅值抑制到普通SVPWM算法的1/2,具有良好的有效性和实用性。 1 引言 目前, 多电平变流器以其突出的优点在高压大功率变流器中得到了日益广泛的应用,它不仅能减少输出波形的谐波,也易于进行模块化设计[1, 2]。二极管中点箝位式(NPC)三电平拓扑结构即是高压大功率变频器的主流拓扑结构之一[3] 。然而在三电平变流器的应用中, 也出现了一些问题,特别是共模电压问题。目前,变频器共模电压的抑制方法主要有两种:一是外加无源滤波器等,或有源滤波器[4-6],这类方法会导致体积和成本显著增加,且不易应用于高压大容量场合;二是通过控制策略从源头减小共模电压,文献[7]、[8]提出一种SPWM消除共模电压的调制方法。该方式是通过异相调制来消除开关共模电压,但是存在直流电压利用率低、线性调制区过小的问题。 针对SPWM调制的电压利用率低、不利于运用于各种调制比工况下的缺点,本文从三电平逆变器共模电压形成机理出发,提出了一种基于优化电压空间矢量(SVPWM)方法, 可有效抑制三电平逆变器输出共模电压。并通过 Matlab/Simulink软件对该方法进行了仿真验证, 结果表明效果良好。 2 光伏三电平逆变器及其共模电压 本文研究的三电平光伏逆变器系统如图1所示。其输入为光伏阵列的直流电压,逆变器主拓扑为NPC三电平结构。设直流母线电压的幅值为Vdc,用开关状态字“1”,“0”和“-1”分别表示逆变器每相输出为+Vdc/2、0和-Vdc/2的三种状态,则三相三电平逆变器总共有27种不同的开关状态。根据幅值和相位可以画出三电平逆变器的电压空间矢量图,具体如图2所示。
摘要 三相三电平逆变器具有输出电压谐波小,/ dv dt小,EMI小等优点,是高压大功率逆变器应用领域的研究热点,三相二极管中点箝位型三电平逆变器是三相三电平逆变器的一种主要拓扑,已经得到了广泛的应用。三相T型三电平逆变器,是基于三相二极管中点箝位型三电平逆变器的一种改进拓扑。这种逆变器中,每个桥臂通过反向串联的开关管实现中点箝位功能,是逆变器输出电压有三种电平。该拓扑比三相二极管中点箝位型三电平拓扑结构每相减少了两个箝位二极管,可以降低损耗并且减少逆变器体积,是一种很有发展前景的拓扑。 本设计采用正弦脉宽调制(SPWM),本文介绍了三相T型三电平逆变器的设计,介绍其结构和基本工作原理,及SPWM控制法的原理,并利用SPWM控制的方法对三电平逆变器进行设计与仿真。本设计采用SIMULINK对T型三电平逆变电路建立模型,并进行仿真。 关键词: T型三电平逆变器、正弦脉宽调制、SIMULINK仿真
目录 第一章绪论 (6) 1.1研究背景及意义 .. 1.2三电平逆变器拓扑分类 第一章 T型三电平逆变器工作原理分析 (6) 1.1逆变器的结构 1.2本章小结 第二章正弦脉波调制(SPWM) (7) 3.1 PWM与SPWM的工作原理 3.2三电平逆变电路SPWM的实现 3.3本章小结 第三章电路仿真与参数计算 (10) 4.1逆变器的基本要求 4.2电路图 4.3调制电路 4.4L-C滤波电路 4.5结果分析 第四章课程设计小结 (14) 参考文献 (15)
第一章绪论 1.1 研究背景及意义 近年来,随着经济的飞速发展,人类对能源的需求也大幅度增加,而传统能源面临着枯竭的危机。在这种情况下,我们不得不加速开发新型能源。各国的专家致力于新能源的开发与利用,光伏发电、风力发电、生物发电等各种新型发电技术已经得到了一定的应用,并且正在蓬勃的发展,尤其是光伏发电,因其成本低、稳定性较好,控制简单等优点,在各国得到了广泛的应用。受地区气象条件的影响,太阳能光伏电池板输出的直流电压极不稳定,而且电压幅值低,容量小。为了高效利用太阳能,需要将不稳定的光伏电池串、并联组合,并且经过多级电力电子变换器组合输出恒频交流电压并网运行。而把这些初始能源转化为可用电能的桥梁就是逆变器。随着开关器件的不断发展,逆变器的拓扑、调制方式和控制策略也在不断发展,控制理论在逆变器的控制上得到了很好的应用,这一切都保证了优良的供电质量。在一些高电压、大功率的应用场合,传统的两电平逆变器由于开关器件耐压限制,无法满足需求。在这种情况下,如何将低耐压开关器件应用于高电压大功率场合成为各国专家研究的热点,由此,多电平逆变器技术应运而生。多电平的概念最早是由日本专家南波江章(A.Nabae)等人在 1980 年提出的[1],通过改变主电路的拓扑结构、增加开关器件的方式,在开关器件关断的时候将直流电压分散到各个器件两端,实现了低耐压开关器件在大功率场合应用。 1.2三电平逆变器拓扑分类 常见的多电平的电路拓扑主要有三种:二极管箝位型逆变器、飞跨电容箝位型逆变器和具有独立直流电源的级联型逆变器。本文研究的 T 型三电平逆变器可以说是中点箝位型逆变器的改进拓扑,其优势主要体现在减少了电流通路中的开关器件数量,减少了传导损耗。而且与二极管箝位型三电平逆变器相比,T 型三电平逆变器的每个桥臂少用了两个箝位二极管,其控制方法和二极管箝位型三电平逆变器类似[2]。T 型三电平逆变器融合了两电平和三电平逆变器的优势,既有两电平逆变器传导损耗低,器件数目少的优点,又有三电平逆变器输出波形好,效率高的优点,是很有发展前景的一种三电平逆变器拓扑。
摘要 三相三电平逆变器具有输出电压谐波小,/ dv dt小,EMI小等优点,是高压大功率逆变器应用领域的研究热点,三相二极管中点箝位型三电平逆变器是三相三电平逆变器的一种主要拓扑,已经得到了广泛的应用。三相T型三电平逆变器,是基于三相二极管中点箝位型三电平逆变器的一种改进拓扑。这种逆变器中,每个桥臂通过反向串联的开关管实现中点箝位功能,是逆变器输出电压有三种电平。该拓扑比三相二极管中点箝位型三电平拓扑结构每相减少了两个箝位二极管,可以降低损耗并且减少逆变器体积,是一种很有发展前景的拓扑。 本设计采用正弦脉宽调制(SPWM),本文介绍了三相T型三电平逆变器的设计,介绍其结构和基本工作原理,及SPWM控制法的原理,并利用SPWM控制的方法对三电平逆变器进行设计与仿真。本设计采用SIMULINK对T型三电平逆变电路建立模型,并进行仿真。 关键词: T型三电平逆变器、正弦脉宽调制、SIMULINK仿真
目录 第一章绪论…………………………………………………………………………6 1.1研究背景及意义 .. 1.2三电平逆变器拓扑分类 第一章T型三电平逆变器工作原理分析…………………………………………6 1.1逆变器的结构 1.2本章小结 第二章正弦脉波调制(SPWM) (7) 3.1PWM与SPWM的工作原理 3.2三电平逆变电路SPWM的实现 3.3本章小结 第三章电路仿真与参数计算………………………………………………………10 4.1逆变器的基本要求 4.2电路图 4.3调制电路 4.4L-C滤波电路 4.5结果分析 第四章课程设计小结.....................................................................14 参考文献 (15) 第一章绪论
45 2009年第6期(总第76期) E-mail:cmee@https://www.doczj.com/doc/6b11355425.html, 收稿日期:2009-02-18 作者简介:黄珊珊,工程硕士,助理工程师。 空间矢量脉宽调制技术(S p a c e V e c t o r P u l s e Width Modulation,SVPWM)以获得圆形磁链轨迹为目的,具有降低转矩脉动,减小波形畸变,提高电压利用率,提高功率因数,降低消耗,易于数字化实现等优点。 而近年来,在高压、大功率变换电路中,一种新型的变换器——箝位二极管式电压型三电平逆变器,由于其相对于传统两电平电压型逆变器表现出明显的优势,引起了越来越多的关注。电压型逆变器输出性能主要取决于调制算法,S V P W M技术以其易于数字实现,电压利用率高等优点,且随着新型器件的出现,得到了广泛应用。为了更好地理解算法的原理,便于控制系统仿真的实现,本文详细介绍了三电平空间矢量S V P W M算法的基本原理,并给出了在S i m u l i n k环境下三电平空间矢量SVPWM算法的实现方法 ,并进行仿真验证。 一、三电平电压空间矢量基本原理 图1为三电平逆变器的主电路图。三电平逆变器每个桥臂有四个开关器件。三点平的参考空间电压矢量定 义为: 图1 三电平逆变器的主电路图 其中,,U a 、U b 、U c 为输入参考电压,仿 真中用∣V ref ∣=abs (V ref )和a=angle(V ref )可以分别得到 幅值和相角。 对于其中一相来说,以电源中点为参考点,可以输出+V d c /2,0和-V d c /2三种电平,也即三种状态:P ,O , n 。引入开关函数S u ,S v ,S w ,则逆变器输出矢量可记 为: 其中S u ,S v ,S w ,可取1,0,-1三种状态(对应P , O ,n )。所以三相三电平逆变器合成电压矢量数为27 种。 图2为三电平逆变器空间电压矢量图。 图2 三电平逆变器空间电压矢量图 电压矢量有6个幅值为V d c的大矢量,6个幅值为的中矢量,12个幅值为 的小矢量和3个零矢 三电平逆变器SVPWM算法的研究及仿真 黄珊珊 广东工业大学 广东广州 510060 摘 要:文章分析了三电平空间矢量算法(S V P W M)的基本原理,采用一种首发矢量全部采用负小矢量的空间矢量调制算法,给出了小三角形区域判断规则、推导了各合成电压矢量的作用时间、合成参考电压矢量的相应输出电压矢量的作用顺序和SVPWM 信号的产生方法,探讨了影响三电平逆变器中点电压平衡的主要因素。仿真实验结果证实了本文提出的空间电压矢量调制算法的有效性。 关键词:逆变器 空间矢量 三电平 SVPWM算法
三电平逆变器基本介绍一、三电平逆变器的基本工作原理 + BUS + 1 2 V DC C 1 D 3 Q 1 Q 2 i L L C + u C D 1 GND + u 负 载 Q 3 + 1 2 V DC C 2 D 4 D 2 Q 4 ? BUS 图1三电平逆变器主电路
图2四个开关管的驱动信号波形
当u>0时,u=S* *1/ 2V DC,且S* =1表示Q1 通Q3 断,S* =0 表示 Q1断Q3通; 当u<0时,u=(S* ?1) *1/ 2V DC,且S* =1表示Q2 通Q4 断,S* =0 表示Q2断Q4通; 由以上可见,S1代表了Q1 通(输出电压的正半周)或Q2 通* = (输出电压的负半周),而由图2 可见,Q1 正半周与Q2 负半周的驱动波形组合起来与原两电平的上管驱动波形完全一致,因此可以直接在原两电平的控制器平台上进行一定的修改,即可得到适合于三电平的控制器。 u = V S *1/ 2V DC = DC 4V t (S1) *1/ 2V ?= DC *v m t V DC 4V 1 4 + V DC 1 ? *v V m DC 4 u u > < 时 时
图3三电平逆变器模型(包括调制部分)
图4三电平逆变器的控制框图二、三电平逆变器的缓冲电路 P1P2 + 1 2 V DC ? G2 G1C DC1 D R1 1 C 1 D 3 Q 1 Q 2 A L i L +u C + u C ? 负 载 + 1 2 V DC ?C DC2 C 2 D R2 2 D 4 Q 3 Q 4 N1N2 图 5 实验中所采用的NPC 缓冲电路
三电平逆变器基本介绍 一、三电平逆变器的基本工作原理 DC V 2 1DC V 21 图1 三电平逆变器主电路 图2 四个开关管的驱动信号波形
当u 时,u ,且表示Q1通Q3断,S 表示 Q1断Q3通; 0>DC V S 2/1**=1*=S 0*= 当u 时,u ,且表示Q2通Q4断,表示Q2断Q4通; 0
图4 三电平逆变器的控制框图 二、三电平逆变器的缓冲电路 DC V 21DC V 21 图5 实验中所采用的NPC 缓冲电路
实验中发现在突加RCD 负载时会在Q2、Q3上产生很大的电压尖峰,经仔细分析,主要有以下两个方面的原因: 第一:在突加RCD 负载时会产生很大的电流尖峰,由于控制板在设计时考虑的状况是当出现过流信号时同时封锁Q1、Q2、Q3、Q4的驱动信号,从而导致A 点电位在封锁Q1、Q2、Q3、Q4驱动瞬间的变化最大幅值可以达到V ,很类似于两电平逆变 器工作时的状态,容易导致开关管上出现电压尖峰。 DC 解决办法:当出现电流尖峰时仅仅封锁Q1、Q4的驱动信号,而Q2、Q3的驱动不封锁,仍然保持原状态不变,如此一来在封锁Q1、Q4驱动瞬间A 点电位的变化最大幅值仅仅为1,因此大大减小了开关管上的电压尖峰。 DC V 2/第二:在突加RCD 负载时输出电压的正负半周会出现误判的状况。 以一个实际的工作状况对此加以说明,假设当前处于桥臂输出电压的正半周,但是由于此时突加RCD 负载因此误判为是在电压的负半周,因此会做以下操作:将原来处于开关状态的Q1改为常断;将原来常通的开关管Q2改为开关状态;将原来处于开关状态的开关管Q3改为常通;将原来常断的开关管Q4改为开关状态,而在此转换过程当中,负载电流很大,很容易在开关管上产生电压尖峰。
242IEEE TRANSACTIONS ON POWER ELECTRONICS,VOL.15,NO.2,MARCH2000 A Comprehensive Study of Neutral-Point V oltage Balancing Problem in Three-Level Neutral-Point-Clamped V oltage Source PWM Inverters Nikola Celanovic,Student Member,IEEE,and Dushan Boroyevich,Member,IEEE Abstract—This paper explores the fundamental limitations of neutral-point voltage balancing problem for different loading con-ditions of three-level voltage source inverters.A new model in DQ coordinate frame utilizing current switching functions is developed as a means to investigate theoretical limitations and to offer a more intuitive insight into the problem.The low-frequency ripple of the neutral point caused by certain loading conditions is reported and quantified. Index Terms—Neutral-point voltage balancing,space vector modulation,three-level converter. I.I NTRODUCTION S INCE it’s introduction in1981[1],the three-level neutral-point-clamped(NPC)voltage source inverter(VSI),Fig.1, has been shown to provide significant advantages over the con-ventional two-level VSI for high-power applications. The main advantages are as follows. 1)V oltage across the switches is only half the dc bus voltage. This feature effectively doubles the power rating of VSI’s for a given power semiconductor device.Moreover,this is achieved without additional,often cumbersome,hard-ware for voltage and current sharing. 2)The first group of voltage harmonics is centered around twice the switching frequency[1],[7].This feature en-ables further reduction in size,weight,and cost of passive components while at the same time improving the quality of output waveforms. On the other hand this topology also has its disadvantages. 1)Three-level VSI’s require a high number of devices. 2)The complexity of the controller is significantly in- creased. 3)The balance of the neutral-point has to be assured. The three-level VSI was first considered with respect to high-capacity high-performance ac drive applications[1].To this day, it remains the area where this topology is most widely used [2]–[4],[7]–[9],[15],and[16].Other interesting applications of Manuscript received March10,1999;revised September22,1999.Recom-mended by Associate Editor,F.Z.Peng. The authors are with the Department of Electrical and Computer Engi-neering,Virginia Polytechnic Institute and State University,Blacksburg,V A, 24061-0111USA. Publisher Item Identifier S 0885-8993(00)02327-9. Fig.1.Circuit schematic of a three-level VSI. this technology include static V AR compensation systems[11], [12],HVDC transmission systems[18],active filtering applica- tions,as well as applications in power conditioning systems for superconductive magnetic energy storage(SMES)[13]. The neutral-point(NP)voltage balancing problem of three-level NPC VSI’s has been widely recognized in litera- ture.Various strategies have been presented,and successful operation has been demonstrated with a dc-link voltage balance maintained.In addition,some of the proposed algorithms avoid the narrow pulse problem[5],[9],minimize losses by not switching the highest current[10],or share the balancing task with front-end converters as in[2]. NP control for the carrier-based PWM has been studied in[15]–[17].In[15],the switching frequency optimal PWM method is introduced.This method controls the NP by,essen- tially,adding the zero sequence voltage to the inverter output. This work was extended in[16],where the authors propose an analytical method for analysis of the NP potential variation, show some limitations of the NP control,and also deal with the dc-link capacitors design issues.In[17],the authors analyze the stability of the NP control based on an insightful dynamic model of the NP control they developed. This paper discusses the issues of NP control from the space vector modulation(SVM)point of view.In addition,the broader range of inverter operating conditions is addressed,and a new mathematical formulation of NP balancing problem is given. Furthermore,low-frequency NP voltage ripple,normalized with the output current and the size of the dc-link capacitors,is given for all operating conditions. 0885-8993/00$10.00?2000IEEE
三电平变频器原理 作者:中南大学信息科学与工程学院许文斌桂武鸣 摘要:论述了空间电压矢量调制(SVPWM)控制二极管钳位式三电平逆变器的原理与实现方法。提出了确定参考矢量的三个规则,并推导出工作矢量作用时间、输出顺序及描述了中点电位的控制规则。通过采用Matlab仿真,结果证明SVPWM控制三电平逆变器的可行性。 英文摘要:In this paper,the principle and implement method of space vector puls e width (SVPWM) controlling diode clamped three-level converter is discussed. Thre e judging rules of determining the location of the desired vector is proposed, and t he duty time of active vectors, output sequence are deduced, and the neutral point potential rule is described. The simulation results through Matlab verify the affectivit y of SVPWM controlling three-level converter. 关键词:SVPWM三电平逆变器仿真 1引言 工程实际中,待控制能量的规模越来越大,而在该过程中充当主角的功率 器件所能承受的关断电压和通态电流能力却受到现有功率半导体器件制作水平的