
采用SPC3设计Profibus -DP 智能从站
Designing Profibus -DP Intelligent Slave Station with SPC 3
张 强
(山东大学控制科学与工程学院,济南 250061)
摘 要 从开发的角度详细介绍了使用SPC3实现Profibus -DP 从站的软硬件设计方法,分析了Profibus -DP 从站的状态机,并介绍了如何编写GSD 文件。
关键词 Profib us -DP SPC3 智能从站
A bs tract The d esigning method of hard ware an d soft ware of Profib us -DP slave station with SPC3are introduced in detail .The state machin e of the Profibus -DP slave station is analyzed and the m ethod of how to write the GSD file is introd uced .Keyw ords Profibus -DP SPC3 Intelli gent Slave s tation
0 引言
国际电工委员会IEC 在2000年1月4日投票通过了现场总线IEC61158国际标准。IEC61158包括了7种现场总线标准,Pr ofibus 作为类型3正式加入IEC61158。Pr ofibus 协议的结构以ISO7498国际标准开放式系统互联网络参考模型OSI 为基础。
Pr ofibus 由Profibus -F MS 、Profibus -DP 和Pr ofibus -PA 三部分组成。F MS 主要用于车间级控制网络,是一种令牌结构和实时多主网络;DP 是一种高速的低成本通信连接,用于设备级控制系统与分散式通信;PA 是专为过程化而设计的,具有本征安全规范。本文主要介绍Profibus -DP (distributed process )协议。
Pr ofibus -DP 使用了OSI 参考模型的第一层、第二层和用户接口,第三层到第七层未加定义。Profibus -DP 主要应用于传感器和执行器级的高速数据传输,它以DI N19245的第一部分为基础,主站周期地读取从站的输入信息并周期地向从站发送输出信息。它的响应时间从几百μs 到几百ms ,数据传输速率为9.6kbps ~12Mbps ,传输的数据容量每个报文多达244个字节,传输介质为屏蔽双绞线或光纤等
。
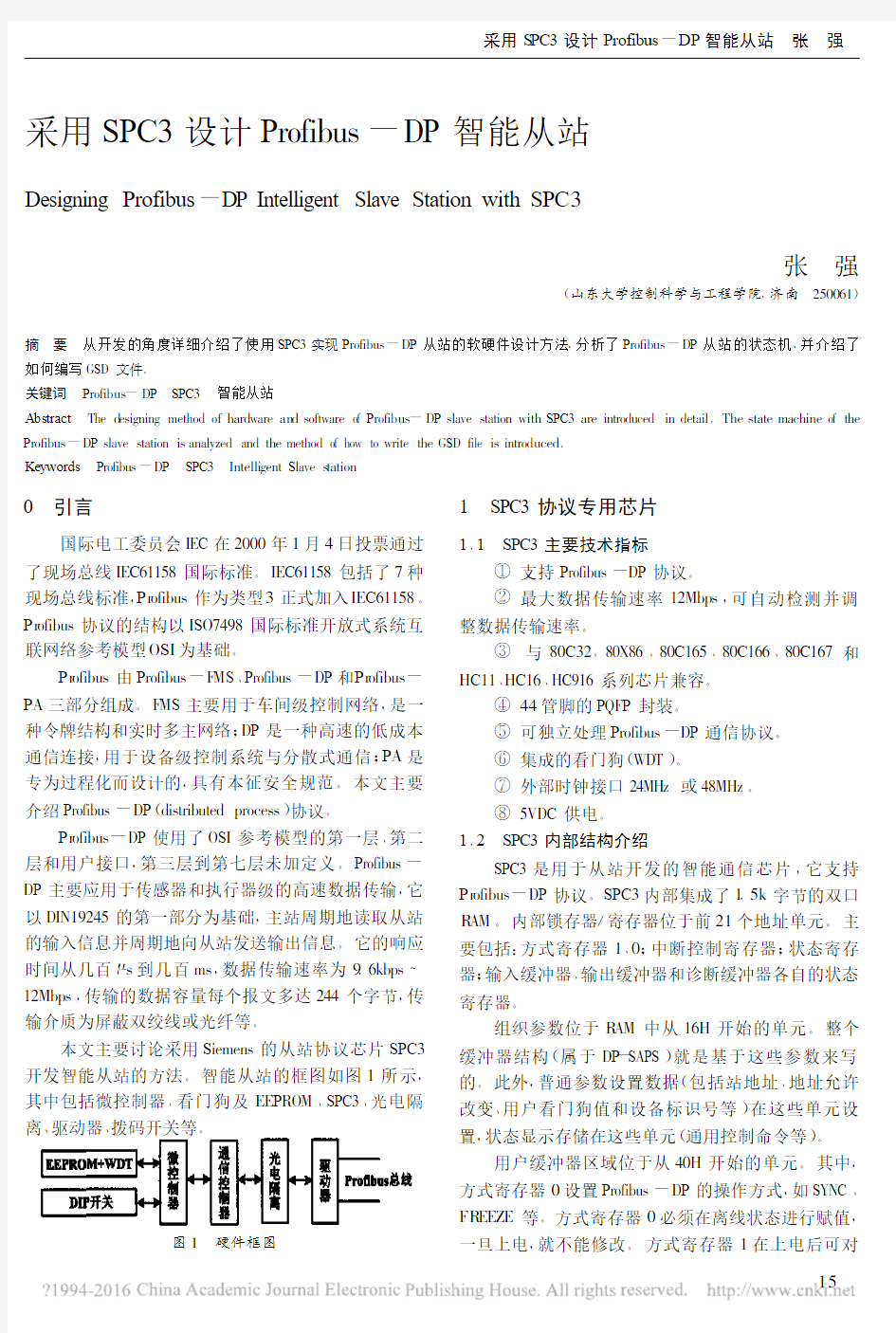
图1 硬件框图
本文主要讨论采用Siemens 的从站协议芯片SPC3开发智能从站的方法。智能从站的框图如图1所示,其中包括微控制器、看门狗及EEPR OM 、SPC3、光电隔离、驱动器、拨码开关等。
1 SPC3协议专用芯片
1.1 SPC3主要技术指标
①支持Profibus -DP 协议。
②最大数据传输速率12Mbps ,可自动检测并调整数据传输速率。
③与80C32、80X86、80C165、80C166、80C167和HC11、HC16、HC916系列芯片兼容。
④44管脚的PQFP 封装。
⑤可独立处理Profibus -DP 通信协议。⑥集成的看门狗(WDT )。
⑦外部时钟接口24MHz 或48MHz 。⑧5VDC 供电。1.2 SPC3内部结构介绍
SPC3是用于从站开发的智能通信芯片,它支持Pr ofibus -DP 协议。SPC3内部集成了1.5k 字节的双口R AM 。内部锁存器/寄存器位于前21个地址单元。主要包括:方式寄存器1、0;中断控制寄存器;状态寄存器;输入缓冲器、输出缓冲器和诊断缓冲器各自的状态寄存器。
组织参数位于R AM 中从16H 开始的单元。整个缓冲器结构(属于DP -SAPS )就是基于这些参数来写的。此外,普通参数设置数据(包括站地址、地址允许改变、用户看门狗值和设备标识号等)在这些单元设置,状态显示存储在这些单元(通用控制命令等)。
用户缓冲器区域位于从40H 开始的单元。其中,方式寄存器0设置Profibus -DP 的操作方式,如SYNC 、FR EEZE 等。方式寄存器0必须在离线状态进行赋值,
一旦上电,就不能修改。方式寄存器1在上电后可对
采用S PC3设计Profibus -DP 智能从站 张 强
DOI :10.16086/j .cn ki .issn 1000-0380.2005.03.005
每个位进行置位和复位。
SPC3有14个中断源,各个中断源没有优先级,而是通过中断屏蔽寄存器和中断响应寄存器来实现中断的。但“新参数数据”中断和“新配置数据”中断可以不用中断响应寄存器响应。中断信号的极性由用户设定。
诊断分为外部诊断和状态诊断。若是外部诊断,用户必须在从第7个字节开始的单元中写入用户数据。若是状态诊断,则只需在第一字节写入00H ,而不必填写从第7个字节开始的用户数据。
从站地址号可以是固定的,也可以由主站设置。若设站地址号不能改变,则在初始化阶段,令“Real No
Add
Change =0FFH ”,“R
SSA
BUF
P TR =
00H ”。
用户看门狗计数器是一个16位的内部存储器单元。初始值由“R User Wd Value ”单元给定。每接收一个数据报文,计数器减1。当减到0000H 时,SPC3就进入“等待参数化”状态,DP 状态机执行“离开主站”命令。
另外,SPC3内部还集成了一个看门狗计数器,可工作于三种不同的状态:波特率监测、波特率控制和DP 控制。SPC3能自动标识总线波特率(9.6kbps -12Mbps )。
1.3 SPC3硬件电路设计
图2 SPC3外部接线图
CPU 使用AT89S52,采用的是Intel 工作方式。CPU 与SPC3的接口电路如图2所示。对AT89S52而言,SPC3相当于它扩展的一个外部RAM 。而且,SPC3有内部地址解码电路,所以AB 8~AB 10接地。此时DB 7~DB 0是数据地址复用总线,可以产生低8位的数据和地址,高4位地址由AB 0~AB 3产生,AB 4~AB 7产生SPC3的片选信号,只有AB 4~AB 7同时为0时才选中SPC3。在图2中,SP C3的片选信号是1000H ,SP C3的内部R AM 位于1000H ~15FFH 单元。本从站的开发采用的是汇编语言编程,占用的内存单元少,不需扩展外部
R AM 。如果使用C 语言编程,则必须扩展足够的R AM 或者使用带有足够R AM 的CPU 。
从图中可以看出,RS -485总线驱动器一侧与9针D 型插座相连,另一侧通过光耦与SPC3相连,目前能满足12Mbps 波特率和驱动芯片有SN65ALS176,SN65ALS1176,SN75ALS176,ADM1485,SN65HVD1176等。采用光电隔离主要是为了消除来自外界的干扰,能满足12Mpbs 波特率的光耦有HCPL7720,HCPL0720,HCPL7721,HCPL0721,HCPL7710等。另外要求电源也要采取隔离措施,如加变压器隔离或采用DC -DC 模块。
2 Profibus -DP 的状态机
根据Profibus -DP 协议可知,Pr ofibus -DP 的状态机描述DP 从站在每种情况下的行为以保证它符合一致性,SPC3内部集成了状态机,用户对状态机的控制是很有限的。对Pr ofibus -DP 的状态机介绍如图3所示。
图3 Profibus -DP 从站的状态机
在Power On 状态,从站能从2类主站接收Set Sla ve Add 报文来改变它的地址,然后从站进入Wait Pr m 状态,等待参数化,此状态从站还可以接收Get Cfg ,Slave Diag 报文。参数化完成后,从站进入Wait Cfg 状态,等待Chk Cfg 报文,另外还可以接收Slave Diag ,Set Pr m ,Get Cfg 报文。如果Chk Cfg 完成后,从站将进入Data Exch 状态,进行数据通信。此时从站还可接收Writing
Outputs ,Reading
Inputs ,Global
Control ,Slave Diag ,Chk Diag ,Get Cfg 报文,若组态和数据交换不成功,就会返回到参数化阶段。Wait Pr m 在对从站进行组态时,必须要编写它的GSD 文件,所谓GSD 就是为了将不同的PR OFIBUS 产品集成在一起而以电子设备数据库文件方式提供的功能函数(如I /O 点数、诊断信息、波特率、时间监视等)。只有有了GSD 文件在CO M Profibus 组态软件下才能对从站组态,否则主站无法识别从站。
3 软件设计
对SPC3的软件操作主要包括两个部分:SPC3的
《自动化仪表》第26卷第3期 2005年3月
初始化和SPC3的中断处理。主程序和中断程序流程图分别如图4和图5所示
。
图4
主程序流程图
图5 中断程序流程图
SPC3的初始化程序应放在主程序的前面,而中断处理程序完成CP U 对SP C3中断输出的响应。SPC3上电复位之后,在正常工作之前必须进行初始化,以配置各个寄存器。中断处理程序用于处理SP C3发生的各种事件,这些事件包括:新的参数报文事件、全局控制命令报文事件、进入或退出数据交换状态事件、新的配置报文事件、新的地址设置报文事件、监测到波特率事件和看门狗溢出事件。数据输入和输出处理(输入输出相对于主站而言)及用户诊断数据输入可以放在应用程序主循环中。在一个应用循环中,由应用来刷新输入BUF 中的数据,保障所有输入数据是最新的更新数据。而SPC3在接收到由Pr ofibus 主站传送的不同输出数据时,会产生输出标志位(同样位于中断请求字单元),CPU 通过在应用循环中轮询标志位进行接收主站数据。对于特定应用的诊断信息,需要实时传递到主站。主应用程序在应用循环中判断是否有可用的诊断BUF 存在,当有空闲BUF 时,应用程序输入诊断信息,并请求更新。对于实时性要求严格的系统,应采用中断方式进行输出数据和诊断数据处理。
4 GSD 文件简介
Pr ofibus 设备具有不同的性能特点,为达到Pr ofibus 简单的即插即用配置,Profibus 设备的特性均在电子设备数据库文件(GSD )中具体说明。标准化的GSD 数据将通信扩大到操作员控制级。使用基于GSD 的组态工具可将不同厂商生产的设备集成在同一总线系统中,既简单又是对用户友好的。4.1 GSD 文件的组成
GSD 文件可以分为三个部分。
①一般规范 这部分包括生产厂商和设备的名称、硬件和软件的版本状况、支持的波特率、可能的监视时间间隔以及总线插头的信号分配。
②与DP 主站有关的规范 这部分包括只适用于DP 主站的各项参数(如连接从站的最多台数或上装和下装能力)。这一部分对从站没有规定。
③与DP 从站有关的规范 这部分包括与从站有关的一切规范(如输入/输出通道的数量和类型、中断测试的规范以及输入/输出数据一致性的信息)。4.2 GSD 文件格式
GSD 文件是ASCII 文件,可以用任何一种ASCII 编辑器编辑,如计事本,UltraEdit 等,也可使用Pr ofibus 用户组织提供的编辑程序GSDEdit 。GSD 文件是由若
干行组成,每行都用一个关键字开头,包括关键字及参数(无符号数或字符串)两部分。GSD 文件中的关键字可以是标准关键字(在Profibus 标准中定义)或自定义关键字,标准关键字可以被Pr ofibus 的任何组态工具所识别,而自定义关键字只能被特定的组态工具识别。
一个GSD 文件的例子如下:#Pr ofibus DP
;DP 设备的GSD 文件均以此关键字开头GSD R evision =1 ;GSD 文件版本Vendor Name =“Meglev ” ;设备制造商Model Name =“DP Sla ve ” ;产品名称R evision =“Version 01” ;产品版本R evision Number =01 ;产品版本号(可选)Ident Number =0x01 ;产品识别号Pr otocol Ident =0 ;协议类型(0表示DP )Station Type =0 ;站类型(0表示从站)FMS Supp =0 ;不支持FMS ,纯DP 从站Hardware Realease =“HW1.0” ;硬件版本Soft ware Realease =“SW1.0” ;软件版本9.6Supp =1 ;支持9.6kbps 波特率
采用S PC3设计Profibus -DP 智能从站 张 强
19.2Supp=1 ;支持19.2kbps波特率
Max Tsdr 9.6=60
;9.6kbps波特率时最大从站延迟时间Max Tsdr19.2=60
;19.2kbps波特率时最大从站延迟时间Repeater Ctrl sig=0 ;不提供R TS信号
24V Pins=0 ;不提供24V电压
I mplementation Type=“SPC3” ;采用的解决方案Fr eeze Mode Supp=0 ;不支持锁定模式
Sync Mode Supp=0 ;不支持同步模式
Auto Baud Supp=1 ;支持自动波特率检测
Set Slave Add Supp=0 ;不支持改变从站地址Fail Safe=0 ;故障安全模式类型
Max User Pr m Data Len=0
;最大用户参数数据长度(0-237) User Pr m Data Len=0 ;用户参数长度
Min Slave Intervall=22 ;最小从站响应循环间隔Modular Station=1 ;是否为模块站
Max Module=1 ;从站最大模块数
Max Input Len=8 ;最大输入数据长度
Max Output Len=8 ;最大输出数据长度
Max Data Len=16
;最大数据的数据长度(输入输出之和) Max Diag Data Len=6
;最大诊断数据长度(6-244)
Sla ve Family=3 ;从站类型
Module=“Modulel”0x23,0x13
;模块1,输入输出各4字节
End Module
Module=“Module2”0x27,0x17
;模块2,输入输出各8字节
End Module
5 结束语
Pr ofibus-DP现场总线已成为我国机械业的行业标准,受到越来越多科研机构和厂家的重视。本文从开发的角度详细阐述了采用SPC3实现Profibus-DP从站的软硬件设计方法。我们开发的带有Profibus-DP 总线接口的设备能满足互操作性以及实时性通信的要求,已在许多行业得到成功应用。
参考文献
1 阳惠宪.现场总线技术及其应用[M].北京:清华大学出版社, 1999
2 Device Descri ption Data FilesGS D,1999
3 Profibus Sp eci fication EN50170Volu me2,1999
4 S PC3an d DPS2User Descripti on Siemens,1996
5 CO M Profib us Manu al[S]Siemens,1999
收稿日期:2004-09-22。
作者张强,男,1980年生,山东大学控制科学与工程学院在读硕士研究生;研究方向为工业计算机控制网络、Profibus现场总线在工业控制系统中的应用。
(上接第14页)
值Y作为校验样本,样本数q=30,将Y作为完成训练的小波网络输入,u=f-1(y)为网络输出,比较X和f-1(y)验证网络的有效性,校验的结果数据如表1所示,为与采用神经网络补偿比较,表中列出了神经网络补偿结果,从表中可知,采用小波网络补偿优于神经网络补偿,小波神经网络的输出值f-1(y)与传感器的实际输入X非常接近,实现了对测量系统传感器非线性误差的补偿,使测量系统的量程扩大并且精度得到了提高。
3 结束语
用小波网络采用计算机软件实现传感器非线性误差的补偿,克服了神经网络的不足,使得网络学习收敛速度快且精度高。它使测量系统成为一个不失真的线性系统,扩大了测量系统量程,并且减小了非线性误差。补偿环节成本低,系统的可靠性高。另外,本文方法不仅可以用于测量系统,也可以用于非线性逆控制等系统。
参考文献
1 Demps ey,G.l.,Al ig,J.S.,etc.Control Sen sor Linearization u sin g Artifi-cial Neu ral network[J].An alog Integrated Circu its an d Signal Process ing, 1997,13(3)
2 陈俊杰,黄惟一.基于遗传神经网络的传感器输出特性拟合[J].
传感技术学报,2001,4
3 庄哲民,黄惟一,刘少强.提高传感器精度的神经网络方法[J].计量学报,2002,23(1)
4 焦李成.神经网络的应用与实现[M].西安:西安电子科技大学出版社.1993
5 Zhan g Qin ghua,Ben ven iste Al bert.Wavelet net work s[J].IEEE Tran s on Neural Net work s,1992,3(8)
修改稿收到日期:2004-05-09。
第一作者廖忠,男,1962年生,1989年2月毕业于南昌大学,获硕士学位,现为在读博士研究生,副教授;主要研究方向为传感器及测控技术、智能控制与仪表,在国内外刊物发表论文十余篇。
《自动化仪表》第26卷第3期 2005年3月
题目要求: 利用三轴加速度传感器实现跌倒的检测。在PSoC 3 FirstTouch板上实现。 一、学习PSOC的开发环境creator的使用。首先图示化选定所用的硬件并产生该硬件的API 函数,然后类似keil环境下做C语言程序。 二、https://www.doczj.com/doc/618681751.html,/data/html/2010-9-14/85764.html理解加速度传感器检测跌倒的算法原理。 三、PSoC 3 FirstTouch上有三轴加速度传感器KXSC7-2050,实现跌倒检测算法。 摘要 跌倒是指人身体的任何部位意外地触及地面或其它较低的平面,而当事人无法实时做出反应.跌倒是对健康,乃至生命的严重威胁。随着老龄化社会的到来,对跌倒的监测和及时报警日益成为一个紧迫的问题。 跌倒监测报警系统的目标是能够将跌倒(Fall)与日常生活的正常动作(Activities of Daily Life,ADL)区分开来,准确地检测跌倒的发生,并智能判断是否需要报警求助。从而尽可能地缩短救助时闻,减小跌倒带来的伤害,降低误报率,最终提升被监测者的生活质量。 本次研究采用了PSoC 3 FirstTouch实验板,利用三轴加速度传感器KXSC7-2050搭建了三维加速度监测系统。 研究主要分为两部分:第一,对跌倒和ADL进行定义和模式分类,通过佩戴在腰间的数据记录系统记录各模式下的三维加速度数据,并对其进行处理、分析和比较;第二,根据分析结果,提出了以SVM或SMA为特征量,以人体状态及姿态为辅助判据的算法,并总结出了具体阈值相关参数。另外,还提出了基于三维加速度数据的步态分析及跌倒预警的设想,并进行了步频分析等初步的分析与论证. 关键词:跌倒检测监测三维加速度传感器 跌倒判断方式 对跌倒的自动检测可通过直接或间接的手段。常见的手段包括: (1)视频分析:需要在每个盗测区域安置设备,不方便且昂贵; (2)声响或振动分析:该方法认为跌倒可通过频率分析与其它活动区分开来,但各种各样的地面材质是一个棘手蛉问题; (3)智能护理系统:跌倒发生后的当然结果就是在其后的一段时期内,被监测者几乎不会有运动,缺点是反应需要的对间较长且易误报警; (4)随身佩戴的装置:它们能够即时检测出跌倒,且如果有智能判断,可自动决定是否发出摄警或求救信号。’ 显然,第四种方案简便、可靠、经济,且易与现有技术结合,从而达到更好的监测效果,难点在予检测的准确性:既不能漏过每一次跌倒,也不能将正常活动误报为跌倒,其中的平衡取舍较难掌握。 早期的跌倒判定手段和方法比较简单,其结果也受较大的限制。如,手杖中的水银开关。该检测方法默认,当跌倒发生时,手杖也躺倒呈水平状态,此时水银开关导通发出报警信号。显然这样的手段太过简单,结果也很粗糙。之后渐渐出现了以加速度信号为监测对象的监测
*** 智能化系统技术方案 <一期、二期综合设计> 设计单位: 设计日期:
目录 第一章系统综述 (3) 1.1项目设计的基础和依据 (3) 1.2项目设计的原则 (3) 1.3项目设计范围 (5) 第二章技术重点及规划说明 (8) 2.1设计思想 (8) 2.2目标定位 (8) 2.3技术重点及建议 (8) 第三章闭路电视监控系统 (10) 3.1概述 (10) 3.2需求分析 (10) 3.3设计说明 (11) 第四章周界报警系统 (33) 4.1概述 (33) 4.2需求分析 (33) 4.3设计说明 (33) 第五章可视对讲门禁系统 (42) 5.1概述 (42) 5.2需求分析 (42) 5.3设计说明 (43) 第六章车辆管理系统 (59) 6.1概述 (59) 6.2需求分析 (60) 6.3设计说明 (60)
第七章安保巡更管理系统 (71) 7.1概述 (71) 7.2需求分析 (72) 7.3设计说明 (72) 第八章机房工程与防雷系统 (78) 8.1概述 (78) 8.2需求分析 (78) 8.3设计说明 (78) 第九章室外管网系统 (85) 9.1概述 (85) 9.2需求分析 (85) 9.3设计说明 (86) 第十章公共广播系统 (91) 10.1概述 (91) 10.2需求分析 (91) 10.3设计说明 (92)
第一章系统综述 1.1 项目设计的基础和依据 作为智能化建筑的系统服务者,我们不是凭空作业,我们的工程设计有着坚实的基础和依据。这些基础和依据主要有如下方面: 1.2 项目设计的原则 1.2.1 先进性 充分考虑信息技术和信息需求的迅速发展的趋势,在技术上应具有一定的超前性,采用国际或国内通行的先进技术,以适应现代科学技术的发展。总体设计要一步到位,要保证项目总体智能化水平达到稳定可靠。 以适度超前的意识为指导原则,保障将建成的项目智能化系统在多年内不落后,
毕业设计方案 课题名称:《基于51单片机的WIFI 遥控小车设计》
毕业设计(论文)原创性声明和使用授权说明 原创性声明 本人郑重承诺:所呈交的毕业设计(论文),是我个人在指导教师的指导下进行的研究工作及取得的成果。尽我所知,除文中特别加以标注和致谢的地方外,不包含其他人或组织已经发表或公布过的研究成果,也不包含我为获得及其它教育机构的学位或学历而使用过的材料。对本研究提供过帮助和做出过贡献的个人或集体,均已在文中作了明确的说明并表示了谢意。 作者签名:日期: 指导教师签名:日期: 使用授权说明 本人完全了解大学关于收集、保存、使用毕业设计(论文)的规定,即:按照学校要求提交毕业设计(论文)的印刷本和电子版本;学校有权保存毕业设计(论文)的印刷本和电子版,并提供目录检索与阅览服务;学校可以采用影印、缩印、数字化或其它复制手段保存论文;在不以赢利为目的前提下,学校可以公布论文的部分或全部内容。 作者签名:日期:
学位论文原创性声明 本人郑重声明:所呈交的论文是本人在导师的指导下独立进行研究所取得的研究成果。除了文中特别加以标注引用的内容外,本论文不包含任何其他个人或集体已经发表或撰写的成果作品。对本文的研究做出重要贡献的个人和集体,均已在文中以明确方式标明。本人完全意识到本声明的法律后果由本人承担。 作者签名:日期:年月日 学位论文版权使用授权书 本学位论文作者完全了解学校有关保留、使用学位论文的规定,同意学校保留并向国家有关部门或机构送交论文的复印件和电子版,允许论文被查阅和借阅。本人授权大学可以将本学位论文的全部或部分内容编入有关数据库进行检索,可以采用影印、缩印或扫描等复制手段保存和汇编本学位论文。 涉密论文按学校规定处理。 作者签名:日期:年月日 导师签名:日期:年月日
智能仪器考试题型:名词解释、简答、简述、综合 没有给重点,但是老师说考题都是由课后习题凝练出来的,所以我将大部分课后习题答案整理出来,仅供参考。难免有错误,望大家谅解并指出。 课后习题参考 第一章 1-1 你在学习和生活中,接触、使用或了解了哪些仪器仪表?它们分别属于哪种类型?指出他们的共同之处与主要区别。选择一种仪器,针对其存在的问题或不足,提出改进设想(课堂作业)。 解:就测量仪器而言,按测量各种物理量不同可划分为八种:几何量计量仪器、热工量计量仪器、机械量计量仪器、时间频率计量仪器、电磁计量仪器、无线电参数测量仪器、光学与声学测量仪器、电离辐射计量仪器。 1-2 结合你对智能仪器概念的理解,讨论“智能化”的层次。 解:P2 智能仪器是计算机技术和测量仪器相结合的产物,是含有微型计算机或微处理器的测量(或检测)仪器。由于它拥有对数据的存储、运算、逻辑判断及自动化操作等功能,具有一定智能的作用(表现为智能的延伸或加强等),因而被称为智能仪器。 P5- P6 智能仪器的四个层次:聪敏仪器、初级智能仪器、模型化仪器和高级智能仪器。 聪敏仪器类是以电子、传感、测量技术为基础(也可能计算机技术和信号处理技术)。特点是通过巧妙的设计而获得某一有特色的功能。初级智能仪器除了应用电子、传感、测量技术外,主要特点是应用了计算机及信号处理技术,这类仪器已具有了拟人的记忆、存储、运算、判断、简单决策等功能。模型化仪器是在初级智能仪器的基础上应用了建模技术和方法,这类仪器可对被测对象状态或行为作出评估,可以建立对环境、干扰、仪器参数变化作出自适应反映的数学模型,并对测量误差(静态或动态误差)进行补偿。高级智能仪器是智能仪器的最高级别,这类仪器多运用模糊判断、容错技术、传感融合、人工智能、专家系统等技术。有较强的自适应、自学习、自组织、自决策、自推理能力。 1-3 仪器仪表的重要性体现在哪些方面?P3-5
智能仪器设计课程设计报告 ―――采用RS 485标准的主从式多机系统设计 学生姓名:王** 学号:********* 班级:******** 任课教师:*** 成绩:
1、设计要求 a) 系统基本结构:1个51系列单片机主机、2个51系列单片机从机(从机1 和从机2)、采用RS 485组成主从式多机系统; b) 系统基本功能:在主机键盘上按“1”键,从机1的LED数码显示器上显示“1”,此后从机1键盘上每按下1个数字键,主机LED数码显示器上能显示对应的数字,当从机1键盘上按下“0”键时,此次通信结束,从机1键盘上再按下任意数字键,主机不显示相应数字;在主机键盘上按“2”,从机2的LED数码显示器上显示“2”,此后从机2键盘上每按下1个数字键,主机LED数码显示器上能显示对应的数字,当从机2键盘上按下“0”键时,此次通信结束,从机2键盘上按下任意数字键后,主机不显示相应数字; c) 选做:从机1和从机2可设计成相关物理量的测量系统,当主机呼叫从机时,从机能把最新的测量值发给主机。 2、方案论证 (1)系统组成:由三个51单片机构成主从通信系统(本组使用的芯片型号是STC89C52,其功能是一致的),每个单片机搭配LED数码管显示器和键盘;通信采用RS-485标准,可使用MAX485芯片作为通信收发器,单片机控制MAX485的使能端进行发送和接受逻辑控制;单主机多从机的通讯系统需要区分地址信息和数据信息,可利用51串口模式中的模式2进行通信,修改主机的SCON.3状态表明主机发送的是否是地址信息,修改某台从机的SM2状态来建立和主机的唯一通信;数据输入使用键盘输入,数据显示可简单的使用数码管显示。
一、前言 随着21世纪的到来,我们居住的地球正处在一个信息革命和知识经济的时代,我国经济迅猛发展,生产力及人民生活水平不断提高。住宅除了满足人们的基本居住要求外,还必须满足办公.教育.娱乐.会客.健身储物.停车等多种要求,与此同时,人们对生活的舒适性.便利性.安全性和高效性提出了更高的要求,智能化住宅小区由此产生。对于一个住宅小区而言,居民的安全是首要的。为了保障小区内的财产和居民的安全,必然将运用各种高新信息技术,预防和解决家居园区的入室盗窃及抢劫作案犯罪.家庭各种灾害及意外事故等的发生。 名城国际居住小区位于新体育场南侧建成后,交通便利,环境优美。小区的一期期工程共有13幢高档住宅,1700余户。 二、居住小区安全防范系统设计依据 (1)规范标准 GA/T75-94《安全防范工程程序与要求》 JGJ/T16-92《民用建筑电气设计规范》 GA/T74-2000《安全防范系统通用图形符号》
GB50198-94《民用闭路监视电视系统设计规范》 GB12663-94《防盗报警控制通用技术条件》 GB10408-2000《入侵探测器的通用技术条件》 GYT253-88《建筑电气安装工程质量检验评定标准》 GA/T72-94《楼宇对讲电控周界门通用技术条件》] GBJ232-90、92《电器装置安装施工及验收规范》 《全国住宅小区智能化系统示范工程建设要点与技术导则》《******市智能住宅小区功能配置试点大纲》 《******小区的总平面图》 《名城国际小区的各幢建筑平面图》
(2)技术指标要求 1. 彩色图像水平清晰度≥400线 2. 水平图像水平清晰度≥270线 3. 图像画面灰度等级不低于8级 4. 黑白电视系统信噪比:≥37db 5. 彩色电视系统信号噪比:≥48db 6. 图像质量按五级损伤制评定,不低于4级 7. 报警控制器有可编程和联网的功能 8. 紧急按钮触发报警后能自锁,需人工复位 9. 报警系统具有键盘发声,分路显示功能,报警响应 10. 报警设备的响应时间≤2秒
智能车毕业设计论文 【篇一:智能小车毕业设计论文终极版】 毕业设计(论文) 基于单片机的智能小车设计 design of the smart car based on scm 长春工程学院 摘要 本寻迹小车是以自己制作的小车作为车的车架,80c51单片机为控 制核心,加以步进电机、光电传感器和电源电路以及其他电路构成。系统由80c51通过io口控制小车的前进后退以及转向。在该系统中,由红外光电传感器实现路径识别,通过对小车速度的控制,使小车 能按照任意给定的黑色引导线平稳地寻迹。实验证明:系统能很好 地满足寻迹小车对路径识别性能和抗干扰能力的要求,速度调节响 应时间快,稳态误差小,具有较好的动态性能。 关键词 80c51 直流电机光电传感器自动寻迹小车 abstract: the smart car is aluminum alloy for the chassis, 80c51 mcu as its core, including stepper motor, plus photoelectric sensors, as well as other flame sensor and power circuit. mcu controls the car turning back forward or running on the white line. rpr220 reflective photo sensor seeks the trace. far infrared flame sensor tracks the flame. in addition, the scm system with sunplus for voice broadcast can remind current status. the system transmits information through df module. the car’s status will be transmitted to the remote console. ocmj4x8c lcd display and 2 keys for start control. keywords: 80c51 dc motor photo sensor self-guiding model car 目录 1 引 言 ....................................................................................................... (1) 2 总体方案设 计 ....................................................................................................... .. (2)
1、智能仪器的发展趋势 (1)微型化(2)多功能化(3)人工智能化(4)网络化 2、智能仪器的分类、组成和特点 (1)从发展应用的角度看,智能仪器系统分为微机内嵌和微机扩展两大类。(2)智能仪器由硬件和软件两大部分组成。硬件包括微处理器、存储器、输入通道、输出通道、人机接口电路、通信接口电路。 (3)智能仪器的特点○1操作自动化○2具有自测功能○3具有数据分析和处理功能○4具有友好的人机对话功能○5具有可程控操作能力 2.1常见的A/D转换器有哪几种类型?其特点是什么? 答:类型(1)并联比较型A/D转换器(2)逐次逼近型A/D转换器(3)双积分型A/D转换器(4)£-△调制型A/D转换器 特点:○1转换速度快,随着转换位数的增加,所需的硬件个数多○2精度、速度、和价格均适中,抗干扰能力差○3精度高、抗干扰性好价格低廉,转换速度较慢○4具有积分式与逐次式的双重优点,以很低的采样分辨率和很高的采样频率将模拟信号数字化 2.4模拟量输出通道有哪几种基本机构?试说明其特点和使用场合。 答:(1)单通道结构:只有一路信号输入,常用于频率较高的模拟信号的A/D 转换。 (2)多通道结构:○1多通道并行结构:常用于模拟信号频率很高且各路必须同步采样的高转换速率系统,速度快、成本高、体积功耗大○2多通道共享结构:适合对转换要求不高的系统。通道速度慢,元件开销少 2.7 在设计智能仪器时,选择模拟多路开关要考虑的主要因素是什么? 答:(1)通道数量(2)泄漏电流(3)导通电阻(4)开关速度 4.1为什么要消除键盘抖动?消除键盘抖动的方法?实现的原理是什么? 答:因为抖动可能导致计算机将一次按键操作误判多次操作。 方法一:硬件去抖动,利用RS触发器的互锁功能去抖动,可以得到理想的按键输出波形。 方法二:软件延时去抖动,通过CPU首次检测到按键按下或松开信息时,延时一段时间,从而躲过抖动期,等待按键稳定后,CPU再次检测,确定按键的状态。 4.4试说明非编码键盘扫描的原理。 答:扫描法(1)判断键盘上有无键闭合(2)消除键抖动影响,软件延时10~20ms,去抖动(3)若有键闭合,则确定闭合键的键值(4)为了保证键每闭合一次,CPU仅做一次处理。 线反转法:(1)P1.7-P1.4作为输出线,P1.3-P1.0作为输入线,并使P1口输出0FH。(2)P1.7-P1.4作为输入线,P1.3-P1.0作为输出线 4.10触摸屏的种类主要有哪些?各有什么特点? 答:(1)电阻式触摸屏,经济型好,供电要求简单,非常容易产业化而且适用的领域多种多样。(2)红外线触摸屏,价格便宜、安装容易,能较好地感应轻微触摸与快速触摸(3)电容式触摸屏,透光率和清晰度高,不但能保护导体和感应器,还能防止环境因素给触摸屏造成的影响。(4)表面声波触摸屏,对原显示器的清晰度影响小,经久耐用。 4.11简述LED显示器动态显示方式的原理及优点? 答:LED驱动用8位的I/O端口驱动,LED共阳极或共阴极由相应的I/O端口控制,轮流选通,由于人的视觉暂留现象和发光二极管的余晖效应,人眼仍感觉所有的器件都在同时显示,获得稳定的视觉效果。优点是占用I/O端口少。4.12简述红外线触摸屏的工作原理及特点。
智能仪器设计课程设计 8. 试设计智能仪表 实现智能数字显示仪表。要求8位数码管显示(4位显示测量值,4位显示设定值),4输入按钮(功能选择、数码管选择、数字增加、数字减少),可设定上下限报警(蜂鸣器报警)。适配Cu100热电阻,测温范围为0℃~150℃。采用位式(两位、三位,具有滞环)控制、并用晶闸管过零驱动1000W电加热器(电源电压为AC220V)。 《智能仪器设计基础课程设计》----40题目 教学说明: 如下设计题目应该在课程开始时布置,并在教学中安排时间,以产品设计案例教学方式讲授如何理解题目以及如何实现题目,并补充完成题目所需要的相关知识。 如下的智能仪表课程设计题目,都是小型智能仪表产品开发方面的题目。涉及智能仪表硬件与软件设计。智能仪器课程设计是智能仪器课程教学的重要环节,根据设计智能仪表产品的课程改革目的,特选择一些小型智能仪表产品作为课设题目,满足教学需求。课程题目小,学生容易学,上手快,可以在短时间走完智能仪表设计的全过程,学会产品设计步骤。 1.设计基本要求 (1)正确理解设计题目,经过查阅资料,给出正确设计方案,画出详细仪表原理框图(各个功能部分用方框表示,各块之间用实际信号线连接)。 在互连网上收集题目中所用到的器件资料,例如传感器(热偶分度表等)、信号调理电路、AD转换器、单片机、继电器、电源、显示器件等。 在互连网上收集相关单片机的显示、AD转换、显示、控制算法等程序。 在充分研究这些资料基础之上,给出设计方案(选择信号调理电路、单片机、显示、按键输入、继电器驱动、电源等,简要说明选择的理由) (2)用Protel99SE软件设计仪表详细原理图。 要求正确标记元件序号、元件数值、封装名。 (3)设计PCB图 在画PCB前应该购买元件,因为有了元件才知道封装尺寸,但也可以不购买元件,只到元件商店测量实际元件尺寸后,画封装图。 (4)熟悉单片机内部资源,学会ADC、SPI接口、定时器、中断、串口、I/O引脚等模块的编程。 (5)采用C语言开发所设计仪表的程序。 按照题目要求,确定仪表需要完成的任务(功能),然后分别编制各任务的程序。程序应该有说明,并有详细注释。 说明:若是不安装实验板或是最小系统板,就只能用Atmel公司的A VR Studio软件或是Keil软件(随意下载)仿真,则学习效果将大打折扣。 2.设计(考试)说明书 说明书内容: (1)封面内容: 《智能仪器设计基础》考试题 题目号:
目录 第一部分综述 (7) 1. 设计依据说明 (7) 2. 方案设计原则 (9) 3 系统设计目标 (10) 4 系统功能图 (10) 第二部分————家园系统的总体结构 (12) 1. 工程范围: 一期、二期工程 (13) 1.1 安全防范部分. (13) 1.2 物业管理系统. (13) 1.3 信息网络系统. (14) 2. 总体结构 (14) 2.1 小区信息网络结构. (14) 2.2 小区控制网络结构. (15) 第三部分安全防范系统 (17) 1. 公共设施监控及周界防范报警系统. (17) 1.1 闭路电视监控及周界防范系统概述 (17) 1.2 设计依据. (18) 1.3 设计原则. (18) 1.4 闭路电视监控及周界防范系统原理 (19) 1.5 摄像机、红外对射探测器安装位置 (21)
1.6 闭路电视监控及周界防范系统设计方案论述 (22) 1.7 闭路电视监控及周界防范系统设备选型及参数 (22) 2. 楼宇对讲与家庭安全防范系统. (26) 2.1 概述. . (26) 2.2 设计标准、规范及依据. (26) 2.3 系统设计思想. (26) 2.4 系统选型原则. (27) 2.5 系统功能特点 (27) 2.6 系统组成. (29) 2.7 对讲系统原理图 (30) 2.8 系统各部分功能技术参数 (30) 3 保安巡更管理系统 (34) 3.1 概述. (34) 3.2 设计思想. (34) 3.3 系统特点. (35) 3.4 系统介绍. (35) 3.5 设备特点 (37) 3.6 系统技术参数. (37) 3.7 电子巡更系统路线图 (38) 第四部分物业管理系统 (39) 1 抄表远传系统 (39) 1.1 概述. (39)
毕业设计说明书 基于单片机的智能小车系统 设计
毕业设计(论文)原创性声明和使用授权说明 原创性声明 本人郑重承诺:所呈交的毕业设计(论文),是我个人在指导教师的指导下进行的研究工作及取得的成果。尽我所知,除文中特别加以标注和致谢的地方外,不包含其他人或组织已经发表或公布过的研究成果,也不包含我为获得及其它教育机构的学位或学历而使用过的材料。对本研究提供过帮助和做出过贡献的个人或集体,均已在文中作了明确的说明并表示了谢意。 作者签名:日期: 指导教师签名:日期: 使用授权说明 本人完全了解大学关于收集、保存、使用毕业设计(论文)的规定,即:按照学校要求提交毕业设计(论文)的印刷本和电子版本;学校有权保存毕业设计(论文)的印刷本和电子版,并提供目录检索与阅览服务;学校可以采用影印、缩印、数字化或其它复制手段保存论文;在不以赢利为目的前提下,学校可以公布论文的部分或全部内容。 作者签名:日期:
学位论文原创性声明 本人郑重声明:所呈交的论文是本人在导师的指导下独立进行研究所取得的研究成果。除了文中特别加以标注引用的内容外,本论文不包含任何其他个人或集体已经发表或撰写的成果作品。对本文的研究做出重要贡献的个人和集体,均已在文中以明确方式标明。本人完全意识到本声明的法律后果由本人承担。 作者签名:日期:年月日 学位论文版权使用授权书 本学位论文作者完全了解学校有关保留、使用学位论文的规定,同意学校保留并向国家有关部门或机构送交论文的复印件和电子版,允许论文被查阅和借阅。本人授权大学可以将本学位论文的全部或部分内容编入有关数据库进行检索,可以采用影印、缩印或扫描等复制手段保存和汇编本学位论文。 涉密论文按学校规定处理。 作者签名:日期:年月日 导师签名:日期:年月日
专业课程设计报告 题目:基于DS18B20的温度测量系统 系别:信息工程系 专业班级: 学生姓名: 指导教师:丹丹 提交日期:2012年5月18日
目录 一、前言 (3) 二、系统组成 (3) 1、设计思路 (4) 2、基本要求 (4) 3、课程设计目的 (4) 三、硬件电路组成及工作原理 (4) 1、温度传感器功能模块 (5) 2、AT89C51单片机 (7) 3、8550PNP三极管 (10) 4、晶振电路 (10) 5、复位电路 (11) 6、键盘电路 (12) 7、显示电路 (13) 四、整体仿真调试与实物连接....... 错误!未定义书签。 五、整体电路图 (15) 六、心得体会 (16) 七、参考文献 (17) 八、附录(源程序) (17)
智能温度测量系统的设计 一、前言 温度是一种基本的环境参数,人民的生活与环境的温度息息相关,在工业生产过程中需要实时测量温度,在农业生产中也离不开温度的测量。因此研究温度的测量方法和装置具有重要意义。测量温度的关键是温度传感器,温度传感器的发展经历了三个发展阶段:传统的分立式温度传感器、模拟集成温度传感器、智能集成温度传感器。目前,国际上新型温度传感器正从模拟式向数字式,集成化向智能化、网络化的方向飞速发展。本文所介绍的智能温度测量系统是基于DS18B20型数字式温度传感器,在89C51单片机的控制下,对环境温度进行实时控制的装置。该系统测量范围宽、测量精确度高,该系统可广泛适用于人民的日常生活和工、农业生产的温度测量。 二、系统组成 智能温度测量系统主要由数字温度计、单片机控制电路、数字式温度显示电路、风扇降温电路、键盘电路、串口通信电路等六部分组成。系统原理框图如下: 图1智能温度测量系统原理框图
智能化工程方案
总体设计 1.1基本情况 XXXX广场小区是位于XX省XX市的一个现代化智能小区工程,本次进行的是XX广场小区二期智能系统工程的建设,共涉及3栋4个单元,共计183户。 XXXX广场小区设计环境优美,建设规格较高,因为在智能化设计上应该与小区总体设计相匹配,体现中高档小区的智能化水平。 XXXX二期设计为XXXX广场总体设计的一部分,遵循总体设计、分步实施的原则。二期智能化工程实施后,可独立实现总体设计中的各种功能。同时,二期的所有系统均可与其他的各期系统实现无缝连接,平滑升级,充分保护用户的投资。在二期设计时,考虑所有管线均为预埋,因此,已经预留了总体设计中各区域的其它部分需要的预埋管线,避免在以后实施其它区域工程时重新开挖布线、造成巨大的浪费问题。 我国从1997年开始制定“小康住宅电气设计(标准)导则”(讨论稿),规定了小康住宅小区电气设计的总体要求,即: ?高度的安全性; ?舒适的生活环境; ?便利的通讯方式; ?综合的信息服务; ?家庭智能化系统。 同时也对小康住宅与小区建设在安防、家庭设备自动化和通讯网络的配置等提出了三级设计标准,即三星级(超前型),二星级(提高型)和一星级(普及型)。 住宅小区智能化的目的、目标,是结合国情,切合实际,在保持、保障已有住宅小区技术性能、使用功能、工程质量和综合效益充分发挥和改进完善的基础上,进一步拓展和增添新的智能化功能需求;同时,智能化还要有助于实现建筑智能化发展的新趋势、新要求。根据实际需求和可能,最大限度、最有效的满足使用功能,是划分和评定智能化水平的前提。针对住宅小区的使用功能,以安全、舒适、方便和效益等四个方面来具体归类,按照智能化程度不同具体划分等级。为了使不同类型、不同居住对象、不同建设标准的住宅小区,合理配置智能化系统建设,示范工程按其功能要求、技术含量、经济合理性等因素综合考虑,划分为:一星级(普及型)、二星级(提高型)、三星级(超前型)三种类型。
海南大学 毕业论文(设计) 题目:基于stm32的智能小车设计学号:20112834320005 姓名:陈亚文 年级:2011级 学院:应用科技学院(儋州校区) 学部:工学部 专业:电子科学与技术 指导教师:张健 完成日期:2014 年12 月 1 日
摘要 本次试验主要分析了基于STM32F103微处理器的智能小车控制系统的系统设计过程。此智能系统的组成主要包括STM32F103控制器、电机驱动电路、红外探测电路、超声波避障电路。本次试验采用STM32F103微处理器为核心芯片,利用PWM技术对速度以及舵机转向进行控制,循迹模块进行黑白检测,避障模块进行障碍物检测并避障功能,其他外围扩展电路实现系统整体功能。小车在运动时,避障程序优先于循迹程序,用超声波避障电路进行测距并避障,在超声波模块下我们使用舵机来控制超声波的发射方向,用红外探测电路实现小车循迹功能。在硬件设计的基础上提出了实现电机控制功能、智能小车简单循迹和避障功能的软件设计方案,并在STM32集成开发环境Keil下编写了相应的控制程序,并使用mcuisp软件进行程序下载。 关键词:stm32;红外探测;超声波避障;PWM;电机控制
Abstract This experiment mainly analyzes the control system of smart car based on microprocessor STM32F103 system design process. The composition of the intelligent system mainly including STM32F103 controller, motor drive circuit, infrared detection circuit, circuit of ultrasonic obstacle avoidance. This experiment adopts STM32F103 microprocessor as the core chip, using PWM technique to control speed and steering gear steering, tracking module is used to detect the black and white, obstacle avoidance module for obstacle detection and obstacle avoidance function, other peripheral extended circuit to realize the whole system function. When the car is moving, obstacle avoidance program prior to tracking, using ultrasonic ranging and obstacle avoidance obstacle avoidance circuit, we use steering gear under ultrasonic module to control the emission direction of ultrasonic, infrared detection circuit is used to implement the car tracking function. On the basis of the hardware design is proposed for motor control function, simple intelligent car tracking and obstacle avoidance function of software design, and in the STM32 integrated development environment under the Keil. Write the corresponding control program, and use McUisp program download software. Keywords:STM32;Infrared detection;Ultrasonic obstacle avoidance;PWM;Motor control
《智能仪器设计基础》试题 一、判断题(每题2 分,共20 分) 1. 因中值滤波满足比例不变性,所以是线性的滤波器。() 2. 基准电压Vr 的精度和稳定性影响零位误差、增益误差的校正效果。() 3. 测量获得一组离散数据建立近似校正模型,非线性校正精度与离散数据精度无关,仅与建模方法有关。() 4. RS232 通信采用的是TTL电平,因此它的传输距离比485 短。() 5. USB协议为设备定义了2种供电模式:自供电和总线供电。在自供电模式下,USB设备不需要任何外接电源设备。() 6. LCD显示器有静态驱动和叠加驱动两种驱动方式,这两种驱动方式可在使用时随时改变。() 7. 智能仪器中的噪声与干扰是因果关系,噪声是干扰之因,干扰是噪声之果。( ) 8. 软件开发过程的三个典型阶段是定义、开发和测试。() 9. RAM 测试方法中,谷值检测法无法检测“粘连”及“连桥”故障。()
10.曲线拟合要求y=f(x )的曲线通过所有离散点(x i ,y i )。() 二、选择题(每题2 分,共20 分) 1. 多通道数据采集系统的框图如下图所示。其中(1 )~(4 )各部分的组成为:( ) A. 放大器、A/D 转换器、D/A 转换器、计算机 B. 多路开关、放大器、A/D 转换器、计算机 C. 多路开关、放大器、D/A 转换器、计算机 D. 放大器、多路开关、A/D 转换器、D/A 转换器 2. 仪器采集数据中存在随机误差和系统误差,基本数据处理顺序是:( ) A. 系统误差消除→数字滤波→标度变换 B. 数字滤波→系统误差消除→标度变换 C. 标度变换→系统误差消除→数字滤波 D. 数字滤波→标度变换→系统误差消除
某某小区智能化设计方案 某·某智能化小区建设 (设计方案) 某工程有限公司 201X年X月
目录 第一章系统综述 (4) 一、项目简介 (4) 二、设计概况 (4) 三、设计标准 (4) 四、设计目标 (5) 五、系统概述 (5) 第二章楼宇对讲智能集成系统………………………………………………… 6 一、系统概述 (6) 二、系统主要产品介绍 (8) 第三章闭路电视监控系统……………………………………………………… 17 一.设计依据 (17) 二.设计原则 (18) 三.设计要求 (19) 四.系统目标 (20) 五.系统设计 (21) 六.系统原理 (22) 七.系统设计 (23) 第四章周界报警系统…………………………………………………………… 24 一、系统概述 (24) 二、设计原则 (24) 三、设计规范与依据 (26) 四、设备功能和特点 (26) 第五章 LED大屏幕显示系统 (34) 一、系统概述 (35) 二、功能特点 (35) 三、设计方案 (36) 第六章公共广播及背景音乐系统……………………………………………… 36 一、系统概述 (37) 二、系统设计 (37) 三、产品介绍 (38) 第七章车辆出入及停车管理系统……………………………………………… 46
一、系统概述 (47) 二、系统功能 (48) 三、产品特色 (50) 四、方案说明 (52) 第八章电子巡更管理系统 (65) 一、设计系统目的 (65) 二、系统概述 (65) 三、技术指标 (66) 第九章 UPS系统及防雷接地系统 (66) 一、UPS系统概述 (66) 二、UPS设计依据 (66) 三、UPS系统设计 (68) 四、防雷接地系统需求分析 (69) 五、防雷接地系统设计依据 (70) 六、系统设计 (72) 第十章智能化系统管网工程 (73) 第十一章售后服务承诺及技术培训 (75) 一、售后服务概述 (75) 二、技术培训 (75)
测控系统课程设计指导 电子信息与自动化学院检测与控制实验中心万文略、彭小峰 电子信息与自动化学院测控技术与仪器系杨泽林、杨继森、庄秋慧 课程设计目的 测控系统课程设计是在学生学习完智能仪器理论和实验课后安排的综合实践教学环节,要求学生在2周的时间内运用所学知识,在教师的指导下按照仪器设计的一般方法设计制作一个功能较为完整的仪器。并写出设计研究报告。通过课程设计使学生在实践上获得智能仪器设计的经验,掌握仪器设计的步骤、过程和方法。为毕业设计及今后从事智能仪器设计打下良好的基础。 课程设计题目:基于PN结传感器的温度测量仪设计 智能仪器的组成一般包括:传感器及信号调理电路、CPU及外围电路、模拟量输入通道、模拟量输出通道、开关量输入输出通道、人机接口电路(键盘、显示)、数据记录、转储(保存、打印)等 主要研究内容: 根据本次课程设计的题目要求,本次课程设计研究的主要内容为传感器及信号调理电路、CPU及其外围电路,AD转换电路,键盘和显示电路。本文对其中关键部分做简单介绍,以使学生能更容易地进行课程设计。 1.半导体二极管的温度特性 选择1N4007整流二极管,其正向偏置工作时PN结上的结电压满足 (式1-1) α,γ是由PN结参数决定的常数 Ugo:硅半导体在OK温度时禁带宽度与电子电荷q的比值。 由式1-1可以看出,PN结具有负的温度系数特性。 据文献记载,当温度变化一度时,结电压变化2mv左右。由式1-1可知,温度变化曲线为指数型非线性变化。其正向偏置电流应保持恒定。 2.放大电路设计 (1)选择放大器 PN结的结电压变化是一个微弱信号,结电压在温度每变化1度时大约变化2mv左右,所以需要进行放大后才能被后续电路处理。选择合适的集成运放来设计放大电路,选择运放时应考虑运放的温度系数,共模抑制比,输入失调电压,带宽等。 可供选择的运算放大器有OP07、LM324等。
一、工程概况 太原市建材厂棚户区改造安置用房项目1#~11#楼及地下车库工程施工北起规划路,南至红沟南街,西起15米规划路,东至太行路太原市龙城北部置业有限公司设计单位同济大学建筑设计研究院(集团)有限公司 二、居住小区安全防范系统设计依据 (1)规范标准 GA/T75-94《安全防范工程程序与要求》 JGJ/T16-92《民用建筑电气设计规范》 GA/T74-2000《安全防范系统通用图形符号》 GB50198-94《民用闭路监视电视系统设计规范》 GB12663-94《防盗报警控制通用技术条件》 GB10408-2000《入侵探测器的通用技术条件》 GYT253-88《建筑电气安装工程质量检验评定标准》
GA/T72-94《楼宇对讲电控周界门通用技术条件》] GBJ232-90、92《电器装置安装施工及验收规范》 《全国住宅小区智能化系统示范工程建设要点与技术导则》《
******市智能住宅小区功能配置试点大纲》 《******小区的总平面图》 《名城国际小区的各幢建筑平面图》 (2)技术指标要求 1. 彩色图像水平清晰度≥400线 2. 水平图像水平清晰度≥270线 3. 图像画面灰度等级不低于8级 4. 黑白电视系统信噪比:≥37db 5. 彩色电视系统信号噪比:≥48db 6. 图像质量按五级损伤制评定,不低于4级 7. 报警控制器有可编程和联网的功能
8. 紧急按钮触发报警后能自锁,需人工复位 9. 报警系统具有键盘发声,分路显示功能,报警响应 10. 报警设备的响应时间≤2秒 11. 系统的启动、布防、撤防、旁路、复位等均采用密码控制
智能小车毕业论文完整 版 Document serial number【UU89WT-UU98YT-UU8CB-UUUT-UUT108】
学士学位论文 系别:计算机科学与技术 学科专业:计算机科学与技术 姓名: @@@@ @@@ 2011年 06月
智能小车引导控制系统 的设计与实现 系别:计算机科学与技术 学科专业:计算机科学与技术 指导老师: @@@ 姓名: @@@ @@@ 2011年 06月
智能小车引导控制系统的设计与实现 摘要:面对诸多恶劣的工作环境(如灭火、救援等),为了有效的避免人员伤亡,就需要采用智能小车去现场来完成相应的任务。因此研究和开发智能小车引导控制系统具有十分重要的意义。本系统采用STC89C51单片机作为核心控制芯片,设计制作了一款通过红外光电传感器检测路径信息、红外火焰传感器检测火源的智能寻迹灭火小车。本系统由单片机控制模块、寻迹传感器模块、驱动电机模块、火源传感器模块、风扇模块、电源模块等组成。实际应用表明,该小车可以在专门设计的场地上实现自主发现火源,自主识别路线,自主行进接近火源并灭火,最终完成灭火的任务。 关键词:单片机小车引导控制传感器
Smart cars guide control system design and implementation Abstract: Confronted with so many bad working environment (such as fire fighting, rescue etc), in order to effectively avoid casualties, need to use intelligent go by car scene to complete relevant tasks. Therefore, the research and development of intelligent car guide control system has the extremely vital significance. This system uses STC89C51 as the core control chip, design and make a new electric sensor detection by infrared sensor information, infrared flame path of intelligent tracing test fire extinguishing car. The system is composed of single-chip microcomputer control module, tracing sensor module, drive motor module, ignition sensor module, fan module, power supply module. The practical application indicates that the car can be in a specially designed field on fire, to realize the independent found autonomous recognition route, independent sources and marching close to the fire extinguishing, finally complete task. Keywords: Microcontroller Car Control system Sensors