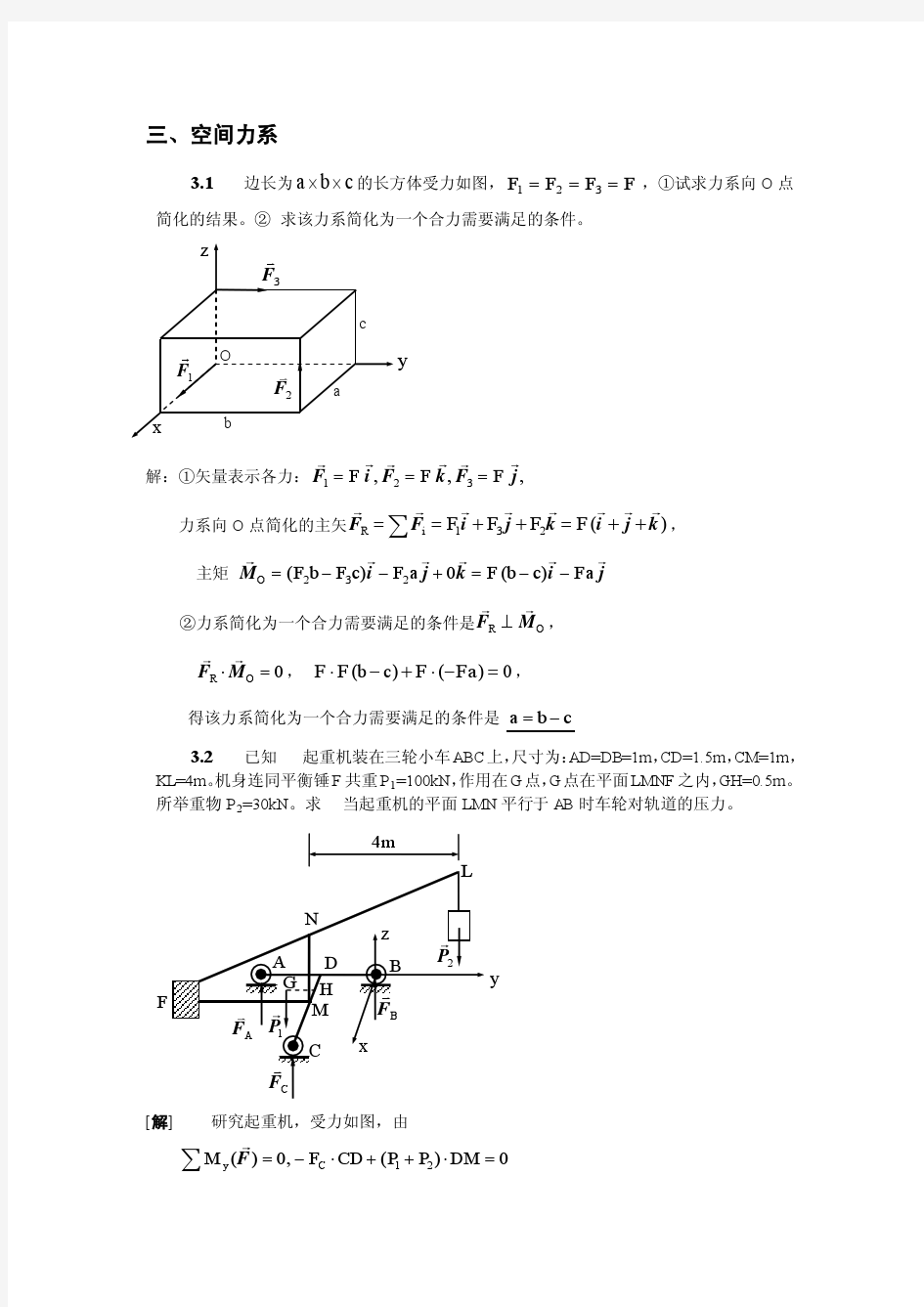

课时授课计划 第23次课 【教学课题】:第三章空间力系 【教学目的】:理解空间力系的平衡条件 【教学重点及处理方法】:空间力系平衡问题的平面解法 处理方法:详细讲解 【教学难点及处理方法】:空间力系的平衡空间力系的定义,空间力系的计算及平衡问题。 处理方法:结合例题分析讲解 【教学方法】: 讲授法 【教具】:三角板 【时间分配】:引入新课 5min 新课 80 min 小结、作业 5min
第二十三次课 【提示启发引出新课】 力系中各力的作用线不在同一平面内,该力系称为空间力系。根据力的作用线的关系可以分为空间汇交力系、空间平行力系、空间任意力系。本次课讨论空间力系的平衡问题。 【新课内容】 第三章空间力系 空间力系——各力的作用线不在同一平面内的力系。 3.1 力的投影和力对轴之矩 3.1.1力在空间直角坐标轴上的投影 1.一次投影法 设空间直角坐标系的三个坐标轴如图所示,已知力F与三个坐标轴所夹的锐角分别为α、β、γ,则力F在三个轴上的投影等于力的大小乘以该夹角的余弦,即
2.二次投影法 有些时候,需要求某力在坐标轴上的投影,但没有直接给出这个力与坐标轴的夹角,而必须改用二次投影法。 如图所示,若已知力F与z轴的夹角为,力F和z轴所确定的平面与x轴的夹角为,可先将力F在oxy平面上投影,然后再向x、y轴进行投影。则力在三个坐标轴上的投影分别为 反过来,若已知力在三个坐标轴上的投影Fx、Fy、Fz,也可求出力的大小和方向,即
例3-1 斜齿圆柱齿轮上A点受到啮合力Fn的作用,Fn沿齿廓在接触处的法线方向,如图所示。n 为压力角,β为斜齿轮的螺旋角。试计算圆周力Ft、径向力Fr、轴向力Fa的大小。 解建立图示直角坐标系Axyz,先将法向力Fn向平面Axy投影得Fxy,其大小为 Fxy=Fncos n 向z轴投影得径向力 Fr=Fnsin n 然后再将Fxy向x、y轴上投影,如图所示。因 =β,得 圆周力Ft=Fxycosβ=Fncos ncosβ 轴向力 Fa=Fxysinβ=Fncos nsinβ 3.1.2力对轴之矩
第五章 空间力系 一、内容提要 本章研究了空间力系的平衡问题和物体重心的计算方法。 1、空间力系的平衡问题 (1)力在空间坐标轴上的投影,可采用下列两种方法: 一次投影法 αcos X F F = βc o s Y F F = γc o s Z F F = 二次投影法 ?γcos sin X F F = ?γs i n s i n Y F F = γcos F F Z = (2)力对轴的矩 力对轴的矩,是力使物体绕某固定轴的转动效应的度量,是一个代数量,它的大小可按下列两种方法求解。 将力投影到垂直于轴的平面上,按平面上力对点的矩计算 ()d F F M xy z ±= 将力沿x 、y 、z 轴分解,根据合力矩定理计算。 力与该轴平行或相交时,力对轴的矩为零。 (3)空间力系的平衡方程 空间汇交力系的平衡方程 0X =∑F 0Y =∑F 0Z =∑F 空间平行力系的平衡方程 0Z =∑F ()0=∑F M y ()0=∑F M x 空间一般力系的平衡方程 0X =∑F 0Y =∑F 0Z =∑F ()0=∑F M z ()0=∑F M y ()0=∑F M x 2、重 心 (1)重心与形心的概念 物体的重心是物体各微小部分的重力所组成的空间平行力系的合力的作用点。形心是物体几何形状的中心。匀质物体的重心与形心重合。 (2)重心和形心坐标公式 一般物体重心的坐标公式 W W F x F x c ∑?= W W F y F y c ∑?= W W F z F z c ∑?= 匀质物体重心的坐标公式
V Vx x c ∑?= V Vy y c ∑?= V Vz z c ∑?= 匀质薄板重心的坐标公式 A Ax x c ∑?= A Ay y c ∑?= (3)组合法求匀质物体的重心(形心) 分割法 负面积法(负体积法) 二、典型例题解析 工程中许多空间受力问题都可以转化成平面问题。因此,空间力系并非本章的重点内容。本章的重点在于计算物体的重心或平面图形的形心。下面这个类型的例题在教材中没有出现,但在工程实际中常会遇到。 知识点:计算物体的重心或平面图形的形心 例 平面桁架由七根等截面的匀质杆构成,尺寸如图所示。求桁架的重心位置。 解 由于这七根杆都是等截面的匀质杆。因此其重量与杆长成正比,并且每根杆的重心都在其中点。 设每米长杆重为1,则根据式(5-10)即可计算出x C 、y C 之值。根据几何关系 l 1 =3m , l 2 = l 3 = l 6 =2.5m , l 4 = l 7 =2m , l 5 =1.5m 。 l lx W Wx x c ∑∑=∑?= = m m 16 5.235.12235.23325.225.1125.25.2(=+?+?+?++?+?++)() = 1.469 m l ly W Wy y c ∑∑=∑?= = m m 16 155.12235.2375.05.15.25.225.25.25.13=+?+?+?+++?+?)( = 0.938m 三、思考题提示或解答 5-1 力在空间直角坐标轴上的投影和此力沿该坐标轴的分力,它们之间有什么联系与区别? 答:力在空间直角坐标轴上的投影只有大小和正负,它是标量;而力沿坐标轴的分力是矢量,有大小,有方向,其作用效果与作用点或作用线有关。在坐标轴确定的前提下,二者的大小相等。 5-2 已知下列几种情况,试说明力F 的作用线与x 轴的关系: (1)ΣF X =0 M z (F )=0; (2)ΣF X =0 M z (F )≠0; (3)ΣF X ≠0 M z (F )=0。 答:(1)ΣF X =0 M z (F )=0:该力与z 轴平行或位于Oyz 平面内; (2)ΣF X =0 M z (F )≠0:该力与x 轴垂直且不与z 轴相交或平行; (3)ΣF X ≠0 M z (F )=0:该力与z 轴相交且不与x 轴垂直。 5-3 试从空间一般力系的平衡方程,推导出空间汇交力系、空间平行力系、平面一般
本讲主要内容 1、空间任意力系向一点的简化及结果分析 2、空间任意力系的平衡方程及常见的空间约束 3、重心的计算
1、空间任意力系向一点的简化 及结果分析
(1) 空间任意力系向一点简化·主矢和主矩 F 1 F 2 F n 1 F ¢ 2F ¢ n F ¢ 1M 2 M n M 空间汇交力系与空间力偶系等效代替一空间任意力系. ) (i O i i i F M M F F ==¢及结果分析
主矢 汇交力系的合力 主矢大小方向作用点: 一般令其作用于简化中心上 2 2 2 R )()()(???++=¢iz iy ix F F F F R R ),cos(F F iz ¢= ¢?k F 1F ¢ 2F ¢n F ¢ 1 M 2 M n M k j i F F ????++==¢z y x i R F F F R F ¢R R ),cos(F F ix ¢= ¢?j F R R ),cos(F F ix ¢ = ¢?i F (与简化中心无关)
主矩 空间力偶系的合力偶矩 主矩大小方向作用位置: 刚体上任意位置 1 M 2 M n M ) (??==i O i O F M M M R F ¢O ),cos(M M x O ?= i M O M 由力对点的矩与力对轴的矩的关系,有 k j i M )()()(???++=i z i y i x O F M F M F M 2 2 2 ) ()()(???++=z y x O M M M M O ),cos(M M y O ?= j M O ),cos(M M z O ?= k M (一般与简化中心有关)
第五章 空间任意力系 5.1解:cos 45sin 60 1.22x F F K N == c o s 45c o s 60 0.7 y F F K N == sin 45 1.4z F F K N == 6084.85x z M F m m K N m m ==? 5070.71y z M F m m K N m m ==? 6050108.84z x y M F m m F m m K N m m =+=? 5.2 解:21sin cos sin x F F F αβα=- 1c o s c o s y F F βα=- 12sin cos z F F F βα=+12sin cos x z M F a aF aF βα==+ 1sin y M aF β= 121cos cos sin cos sin z y x M F a F a aF aF aF βααβα=-=--- 5.3解:两力F 、F ′能形成力矩1M 1M Fa m ==? 11cos 45x M M = 10y M = 11sin 45z M M = 1c o s 4550x M M K N m == ? 11sin 4550100z z M M M M K N m =+=+=? C M m ==?63.4α= 90β= 26.56γ= 5.4 如图所示,置于水平面上的网格,每格边长a = 1m ,力系如图所示,选O 点为简化中心,坐标如图所示。已知:F 1 = 5 N ,F 2 = 4 N ,F 3 = 3 N ;M 1 = 4 N·m ,M 2 = 2 N·m ,求力系向O 点简化所得的主矢'R F 和主矩M O 。 题5.4图 解:' 1236R F F F F N =+-=
第三章 空间力系 一、空间汇交力系 (一)空间汇交力系的合成 1.空间力在坐标轴上的投影 (1)一次投影法 如图3-1所示,若已知力F 与三个坐标轴x,y,z 间的夹角分别为θ、β和γ,则 力F 在三个坐标轴上的投影分别为 ?? ? ?? ===γβθcos cos cos z y x F F F (3.1) 图3-1 相应的,若已知力F 的三个投影,可以求出力F 的大小和方向,即大小为 222z y x F F F F ++= (3.2) 方向 ?? ??? ???? === F F F F F F z y x γβθcos cos cos (3.3) (2)二次投影法
如图3-2所示,若已知力F 与坐标轴Oxy 的仰角γ以及力F 在Oxy 平面上的 投影xy F 与x 轴间的夹角?,则力F 在三个坐标轴上的投影分别为 γ?λ?γsin sin in cos in F F Fs F Fs F z y x ===,, 图3-2 2.合力投影定理 合力在某轴上的投影,等于各分力在同一坐标轴上投影的代数和。即 ∑=+++=xi xn x x Rx F F F F F 21 同理 ∑∑==zi Rz yi Ry F F F F , 3.空间共点力系的合成 空间共点力系可以合成为一个合力,该合力的作用线通过力系的公共作用 点,合力的大小和方向为 ()()() 2 2 2 ∑∑∑++= z y x R F F F F (3.4) ()()()? ? ? ? ? ????===∑∑∑R z R R y R R x R F F F F F F k F j F i F ,cos ,cos ,cos (3.5) (二)空间汇交力系的平衡 1.空间汇交力系的平衡条件 空间汇交力系平衡的充要条件是合力等于零,即 ()()() 02 2 2 =++= ∑∑ ∑z y x R F F F F
理论力学(机械工业出版社)第三章 空间力系习题解答 习题3-1 在边长为a的正六面体上作用有三个力,如图3-26所示,已知:F1=6kN,F2=2kN,F3=4kN。试求各力在三个坐标轴上的投影。图3-26 F1x?0F1y?0F1z?F1?6kN F2y?Fcos45??2kNF2z?0 F2x??F2cos45???2kNF3x?F3343?kN33F3 y??F3343??kN33F3z?F3343?kN 33 3-2 如图3-27所示,已知六面体尺寸为400 mm×300 mm×300mm,正面有力F1=100N,中间有力F2=200N,顶面有力偶M=20N·m作用。试求各力及力偶对z轴之矩的和。图3-27 ?Mz??F1cos45???F2434?? 20 ??202?24034?20???m 3-3如图3-28所示,水平轮上A点作用一力F=1kN,方向与轮面成a=60°的角,
且在过A点与轮缘相切的铅垂面内,而点A与轮心O?的连线与通过O?点平行于y轴的直线成b=45°角,h=r=1m。试求力F在三个坐标轴上的投影和对三个坐标轴之矩。图3-28 Fx?Fcos?sin??1000?cos60??sin45??2502 N?354N Fy??Fcos?cos???1000?cos60??sin45???25 02N??354N 1 Mx(F)?|Fy|?h?|Fz|?rcos??354?1?866?1?co s45???258N?m My(F)?|Fx|?h?|Fz|?rsin??354?1?866?1?sin 45??966N?m Mz(F)??Fcos??r??1000?cos60??1??500N? m Fz??Fsin???1000?sin60???5003??866N 3-4 曲拐手柄如图3-29所示,已知作用于手柄上的力F=100N,AB=100mm,BC=400mm,CD=200mm,a=30°。试求力F对x、y、z轴之矩。图 3-29 ?Fsin?sin??100?sin230??25N
第三章 空间力系 一、是非题判断题 3.1.1 对一空间任意力系,若其力多边形自行封闭,则该力系的主矢为零。 ( ∨ ) 平面力系中,若其力多边形自行闭合,则力系平衡。( × ) 3.1.2只要是空间力系就可以列出6 个独立的平衡方程。 ( × ) 3.1.3若由三个力偶组成的空间力偶系平衡,则三个力偶矩矢首尾相连必构成自行封闭的三角形。 ( ∨ ) 3.1.4 空间汇交力系平衡的充分和必要条件是力系的合力为零;空间力偶系平衡的充分和必要条件是力偶系的合力偶矩为零。 ( ∨ ) 二、填空题 3.2.1 若一空间力系中各力的作用线平行于某一固定平面,则此力系有 5 个独立的平衡方程。 3.2.2 板ABCD 由六根杆支承如图所示,受任意已知力系而处于平衡,为保证所列的每个方程中只包含一个未知力,则所取力矩平衡方程和投影平衡方程分别为 : 三、计算题 3.3.1在图示力系中,F 1=100N ,F 2=300N ,F 3=200N ,各力作用线位置如图所示,求力系向点O 简化的结果。 ∑=0CD M 6F ?∑=0CG M 5 F ?∑=0AC M 4F ?∑=0 DH M 1F ?∑=0CD F 3 F ?∑=0 BD M 2 F ?Rx F ' 解: 5 10013100N 3345.-=5 100200 2001310020030032??=--==∑--cos sin βαF F X Ry F 'N F Y 624913100300 3002.cos =?===∑αRz F 'N F F Z 56105100100 20010031.cos =?-=-==∑β)(...'N k j i k Z j Y i X F R 561062493345∑∑∑++-=?+?+?=∴x M 0 Nm 7951.-=5 100100 20013100300300301032????=--==∑0.3--0.1sin .cos .βαF F M x y M 0Nm F F M y 64361310020030010020102021.0.1-.sin ..-=???-=-==∑αZ M 0Nm 59103.=200200200300303032??+??=+==∑0.30.3cos .sin .βαF F M Z
习 题 3-1 在边长为a 的正六面体上作用有三个力,如图3-26所示,已知:F 1=6kN ,F 2=2kN ,F 3=4kN 。试求各力在三个坐标轴上的投影。 图3-26 kN 60 1111====F F F F z y x 0kN 245cos kN 245cos 2222== ?=-=?-=z y x F F F F F kN 3 3 433kN 3 3 433kN 3 34333 33 33 3==-=-===F F F F F F z y x 3-2 如图3-27所示,已知六面体尺寸为400 mm ×300 mm ×300mm ,正面有力F 1=100N ,中间有力F 2=200N ,顶面有力偶M =20N ·m 作用。试求各力及力偶对z 轴之矩的和。 图3-27 203.034 44.045cos 2 1-?+??-=∑F F M z m N 125.72034 240220?-=-+ -= 3-3如图3-28所示,水平轮上A 点作用一力F =1kN ,方向与轮面成a=60°的角,且在过A 点与轮缘相切的铅垂面内,而点A 与轮心O '的连线与通过O '点平行于y 轴的直线成b=45°角, h =r=1m 。试求力F 在三个坐标轴上的投影和对三个坐标轴之矩。 图3-28 N 354N 225045sin 60cos 1000sin cos ==????==βαF F x N 354N 225045sin 60cos 1000cos cos -=-=????-=-=βαF F y
N 866350060sin 1000sin -=-=??-=-=αF F z m N 25845cos 18661354cos ||||)(?-=???-?=?-?=βr F h F M z y x F m N 96645sin 18661354sin ||||)(?=???+?=?+?=βr F h F M z x y F m N 500160cos 1000cos )(?-=???-=?-=r F M z αF 3-4 曲拐手柄如图3-29所示,已知作用于手柄上的力 F =100N ,AB =100mm ,BC =400mm ,CD =200mm ,a=30°。试求力F 对 x 、y 、z 轴之矩。 图3-29 N 2530sin 100sin sin 2=??==ααF F x N 3.43N 32530cos 30sin 100cos sin -=-=????-=-=ααF F y N 6.8635030cos 10030cos -=-=??-=?-=F F z 3 .03504.0325)(||||)(?-?-=+?-?-=CD AB F BC F M z y x F m N 3.43325?-=-= m N 104.025||)(?-=?-=?-=BC F M x y F m N 5.73.025)(||)(?-=?-=+?-=CD AB F M x z F 3-5 长方体的顶角A 和B 分别作用力F 1和F 2,如图3-30所示,已知:F 1=500N ,F 2=700N 。试求该力系向O 点简化的主矢和主矩。 图3-30 N 4.82114100520014 25 221R -=--=? -?-='F F F x N 2.561141501432R -=-=?-='F F y N 7.4101450510014 15 1 21R =+=? +?='F F F z N 3.10767.410)2.561()4.821(222R =+-+-='F
5-1 5-2.在图示正方体的表面ABFE内作用一力偶,其矩M=50KN·m,转向如图;又沿GA,BH作用两力、',R=R'=502KN;α=1m。试求该力系向C点简化结果。 解:主矢: ' R=ΣF i=0 主矩:M c=M+m(R,R') 又由M cx=-m(R,R')·cos45°=-50KN·m M cY=0 M cz=M-m(R,R')·sin45°=0 ∴M c的大小为 Mc=(M cx2+M cY2+M cz2)1/2 =50KN·m M c方向: Cos(M c,i)=cosα=M cx/Mc=-1,α=180°Cos(c,)=cosβ=M cY/Mc=0,β=90°Cos(c,)=cosγ=M cZ/Mc=0,γ=90°即c沿X轴负向
5-3.一个力系如图示,已知:F 1=F 2=F 3,M=F ·a ,OA=OD=OE=a ,OB=OC=2a 。试求此力系的简化结果。 解:向O 点简化,主矢'投影 Rx '=-F · 21 R Y '=-F ·2 1 R Z '=F ·2 '=-F ·21-F ·21+F ·2 主矩o 的投影: M ox =2 13Fa ,M oY =0,M oz =0 M o '=2 13Fa i R '·M o =-2 13aF 2≠0,R '不垂直M o 所以简化后的结果为力螺旋。 5-4曲杆OABCD 的OB 段与Y 轴重合,BC 段与X 轴平行,CD 段与Z 轴平行,已知:P 1=50N ,P 2=50N ;P 3=100N ,P 4=100N ,L 1=100mm ,L 2=75mm 。试求以B 点为简化中心将此四个力简化成最简单的形式,并确定其位置。
第五章 空间任意力系 解:cos 45sin 60 1.22x F F KN ==o o cos45cos600.7y F F KN ==o o sin 45 1.4z F F KN ==o 6084.85x z M F mm KN mm ==? 5070.71y z M F mm KN mm ==? 6050108.84z x y M F mm F mm KN mm =+=? 解:21sin cos sin x F F F αβα=- 1cos cos y F F βα=- 12sin cos z F F F βα=+12sin cos x z M F a aF aF βα==+ 1sin y M aF β= 121cos cos sin cos sin z y x M F a F a aF aF aF βααβα=-=--- 解:两力F 、F ′能形成力矩1M 1502M Fa KN m ==? 11cos 45x M M =o 10y M = 11sin 45z M M =o 1cos 4550x M M KN m ==?o 11sin 4550100z z M M M M KN m =+=+=?o 22505C z x M M M KN m =+=?63.4α=o 90β=o 26.56γ=o 如图所示,置于水平面上的网格,每格边长a = 1m ,力系如图所示,选O 点为简化中心,坐标如图所示。已知:F 1 = 5 N ,F 2 = 4 N ,F 3 = 3 N ;M 1 = 4 N·m,M 2 = 2 N·m,求力系向 O 点简化所得的主矢'R F 和主矩M O 。 题图
3、空间一般力系 3.1内容提要 3.1.1力在轴上的投影 力在轴上的投影祥见表3-1 表3-1 力在轴上的投影 3.1.2力对点的矩和力对轴的矩 有关力矩的概念祥见表3-2 3.1.3空间一般力系的简化 1、空间任意力系向任一点简化 空间一般力系向简化中心简化,可得主矢和主矩,其结果见表3-3。 2、空间一般力系简化的最后结果
空间一般力系简化的最后结果见表3-4 3.1.4空间一般力系的平衡 空间一般力系是力系的最一般形式,其平衡的充要条件是,力系的主矢和对任一点O 的主矩都等于零,即 0='R F ,00=M 空间力系的平衡方程见表3-5。 3.2解题要点 1、 空间一般力系的题型可分为空间力系的简化问题和平衡问题两大类。 物体在空间力系作用下的平衡问题的解题方法和步骤与平面问题基本相同。但求解空间问题时,要有清晰的空间概念,熟练掌握力在轴上的投影和力对轴之矩。 3、为了简化计算,在选取投影抽与力拒轴时,投影轴要与尽可能多的未知力或其所 在的平面相垂直,力矩轴应与尽可能多的未知力相交或平行.投影轴不一定要彼此垂直, 也不一定要与力矩轴相重合。在列平衡方程时,可用适当的力矩方程取代投影方程,即 可采用四矩式、五矩式或六矩式的平衡方程,只要所建立的平衡方程是彼此独立的,就能 解出全部未知量。 4.解空间力系平衡问题时,有时采用将该力系向三个相互垂直的坐标平面投影的方 法,将空间力系化为三个平面力系分别求解。采用此法时,必须注意各力在投影面上投 影的大小、方向及作用点的位置。
3.3范例分析 例3-1 图3-1(a)为直角三棱柱。其上作用力系::F 1=200 N,22F F '==100N ,试求该力系在各轴上的投影及对轴之矩。 图3-1 解 解题思路: F 1在轴上的投影可按直接投影法计算,对轴之矩可用力对轴之矩的解析式计算;22F F '与组成一个空间力偶矩矢M 1=F 2×0.2=20N ·m ,如图(b )所示,对轴之矩直接投影即可。 )N ( 28.7429 22004 .03.02.02.02 2 2 1 =? =++=F F x )N ( 56.1482942002941 =?==F F y )N ( 41.11129 320029 31 -=?-=-=F F z )m N ( 56.44041.1114.0)(?-=-?-=-=y z x zF yF M )m N ( 28.341241.1112.053 )(1?=+?=+ -=M xF zF M z x y 154 )(M yF xF M x y z +-= )m N ( 161628.44.056.1482.0?=+?-?=7 例3-2均质矩形板ABCD 重P=200 N ,作用在其对角线交点上,矩形板用球形铰链A 和蝶 形铰链B 固定在墙上,并用绳子CE 维持在水平位置如图3-2(a )所示,若α=30°,试求绳子的拉力以及铰链A,B 的反力。
第六章 空间力系及重心 一、内容提要 1、空间力对点之矩和对轴之矩 1)空间力对点之矩是矢量,且F r F m o ?=)( 2)空间力对轴之矩是一代数量,其正负号按右手螺旋规则确定,大小有两种计算方法: (a )先将力投影到垂直于轴的平面上,然后按平面上力对点之矩计算,即 )()(yz o Z F m F m = (b)若已知力在坐标轴上的投影F x 、F y 和F Z 及该力的作用点的坐标x 、y 、z ,则力对各坐标轴的矩可表示为 =)(F m x yF z -zF y =)(F m y zF x -xF z =)(F m z xF y -yF x 3) 力对点之矩和力对轴之矩的关系(力矩关系定理): x o x F m F m )]([)(= y o y F m F m )]([)(= z o z F m F m )]([)(= 4)特殊情况 当力与轴平行或相交(即力与轴共面)时,力对轴之矩等于零。 2、空间任意力系的简化、合成 1)空间任意力系的简化、力系的主矢与主矩 主矢R /=∑F i , 主矢的大小和方向与简化中心的位置无关。 主矩M o =∑m o (F), 主矩的大小和转向一般与简化中心的位置有关。 2)空间任意力系的合成结果
空间任意力系的平衡方程的基本形式为 0=∑x F ,0=∑y F ,0=∑Z F 0)(=∑F m x ,0)(=∑F m y ,0)(=∑F m Z 2)几种特殊力系的平衡方程 (a )空间汇交力系的平衡方程的基本形式为 0=∑x F ,0=∑y F ,0=∑Z F (b )空间平行力系,若力系中各力与轴平行,则0≡∑x F ,0≡∑y F , 0)(≡∑F m Z ,其平衡方程的基本形式为: 0=∑Z F ,0)(=∑F m x ,0)(=∑F m y (c )空间力偶系的平衡方程的基本形式为 0)(=∑F m x ,0)(=∑F m y ,0)(=∑F m Z 4、本章根据合力矩定理推导了重心坐标公式。对于简单形状的均质物体,其重心可用积分形式的重心坐标公式确定,或直接查表。至于复杂形状的均质物体的重心,可采用分割法或负面积(负体积)法求得。
第三章 空间力系 一、 判别题(正确和是用√,错误和否用×,填入括号内。) 4-1 力对点之矩是定位矢量,力对轴之矩是代数量。( √ ) 4-2 当力与轴共面时,力对该轴之矩等于零。( √ ) 4-3 在空间问题中,力偶对刚体的作用完全由力偶矩矢决定。( √ ) 4-4 将一空间力系向某点简化,若所得的主矢和主矩正交,则此力系简化的最后结果为 一合力。( √ ) 4-5 某空间力系满足条件:ΣΣΣΣy x y F 0,Z 0,M (F )0,M (F )0====,该力系简化的最后结果可能是力、力偶或平衡。( √ ) 4-6 空间力对点之矩矢量在任意轴上的投影,等于该力对该轴之矩。( × ) 4-7 空间力对点之矩矢量在过该点的任意轴上的投影等于该力对该轴之矩。( √ ) 4-8 如果选取两个不同的坐标系来计算同一物体的重心位置,所得重心坐标相同。( × ) 4-9 重心在物体内的位置与坐标系的选取无关。 ( √ ) 4-10 如题图4-10所示,若力F 沿x 、y 、z 轴的分力为 F x 、F y 和F z ,则力F 在x 1轴上的投影等于F x 和F z 在x 1 轴上的投影的代数和。 ( √ ) 4-11 在题图4-10中,当x 1轴与z 轴间的夹角 ??? ??=c b arctg ?时,力F 才能沿x 1轴和y 轴分解成两个分 量。( √ ) 4-12 由n 个力系组成的空间平衡力系,若其中(n -1)个力相交于A 点,则另一个力也一定通过A 点。( √ ) 4-13 空间汇交力系在任选的三个投影轴上的投影的代数和分别为零,则汇交力系一定平衡。( × ) 4-14 某空间力系由两个力组成,此二力既不平行,又不相交,则该力系简化的最终结果为力螺旋。( √ ) 4-15 空间任意力系的合力(如果存在合力)的大小一定等于该力系向任一点简化的主矢大小。( √ ) 题4-10图
第六章空间力系和重心 教学目标 1 能熟练地计算力在空间直角坐标轴上的投影和力对轴之矩。 2 了解空间力系向一点简化的方法和结果。 3 能应用平衡条件求解空间汇交力系、空间任意力系、空间平行力系的平衡问题。 4 能正确地画出各种常见空间约束的约束力。 5 对重心应有清晰的概念,能熟练地应用组合法求物体的重心。 本章重点 1 力在空间直角坐标轴上的投影和力对轴之矩。 2 空间汇交力系、空间任意力系、空间平行力系平衡方程的应用。 3 各种常见空间约束的约束力。 4 重心的坐标公式。 本章难点 空间矢量的运算,空间结构的几何关系和立体图。 教学过程(下页)
一、空间力系的简化 1.空间力系向一点简化 刚体上作用空间力系),,(21n F F F ,将力系中各力向任选的简化中心O 简化。 主矢:∑∑='=C i F F F ,与O 点选择无关。 (6-1) 主矩:∑∑∑?===)()(00i i i i F r F M M M ,与O 点的选择有关。 (6-2) 主矢F 和主矩0M 的解析表达式 222)()()(∑∑∑++=iz iy ix F F F F (6-3) F F x F ix ∑= ),cos( ,F F y F iy ∑= ),cos( ,F F z F iz ∑= ),cos( 2 220))(())(())((i z i y i x F M F M F M M ∑∑∑++= (6-4) 0) (),cos(M F M x M i x ∑= ,0 0) (),cos(M F M y M i y ∑= ,0 0) (),cos(M F M z M i z ∑= 结论:空间力系向任一点简化,一般可得到一力和一力偶,该力通过简化中心,其大小和方向等于力系的主矢,该力偶的力偶矩矢等于力系对简化中心的主矩。 2.空间力系简化的最后结果 (1)空间力系平衡 0=F ,00=M ,此空间力系为平衡力系。 (2)空间力系简化为一合力偶 0=F ,00≠M ,此空间力系简化为一合力偶,合力偶矩矢等于力系主矩0M 与简 化中心的位置无关。