
第五章 频率响应法
一。基本要求:
1. 了解频率特性的基本概念;频率特性的表示方法 2. 熟练掌握典型环节的频率特性 3.掌握奈氏图的绘制方法 4.熟炼掌握伯德图的绘制方法
5.熟练掌握奈魁斯特稳定判据及稳定裕量的计算 6.掌握由频率特性分析系统的稳定性和性能的方法。
二.本章要点:
1.频率特性
(1)在正弦输入信号的作用下,线性定常系统输出的稳态分量与输入正弦信号的复数比称为系统的频率特性。
(2)频率特性与传递函数的关系为:
ω
ωj s s G j G ==)
()(
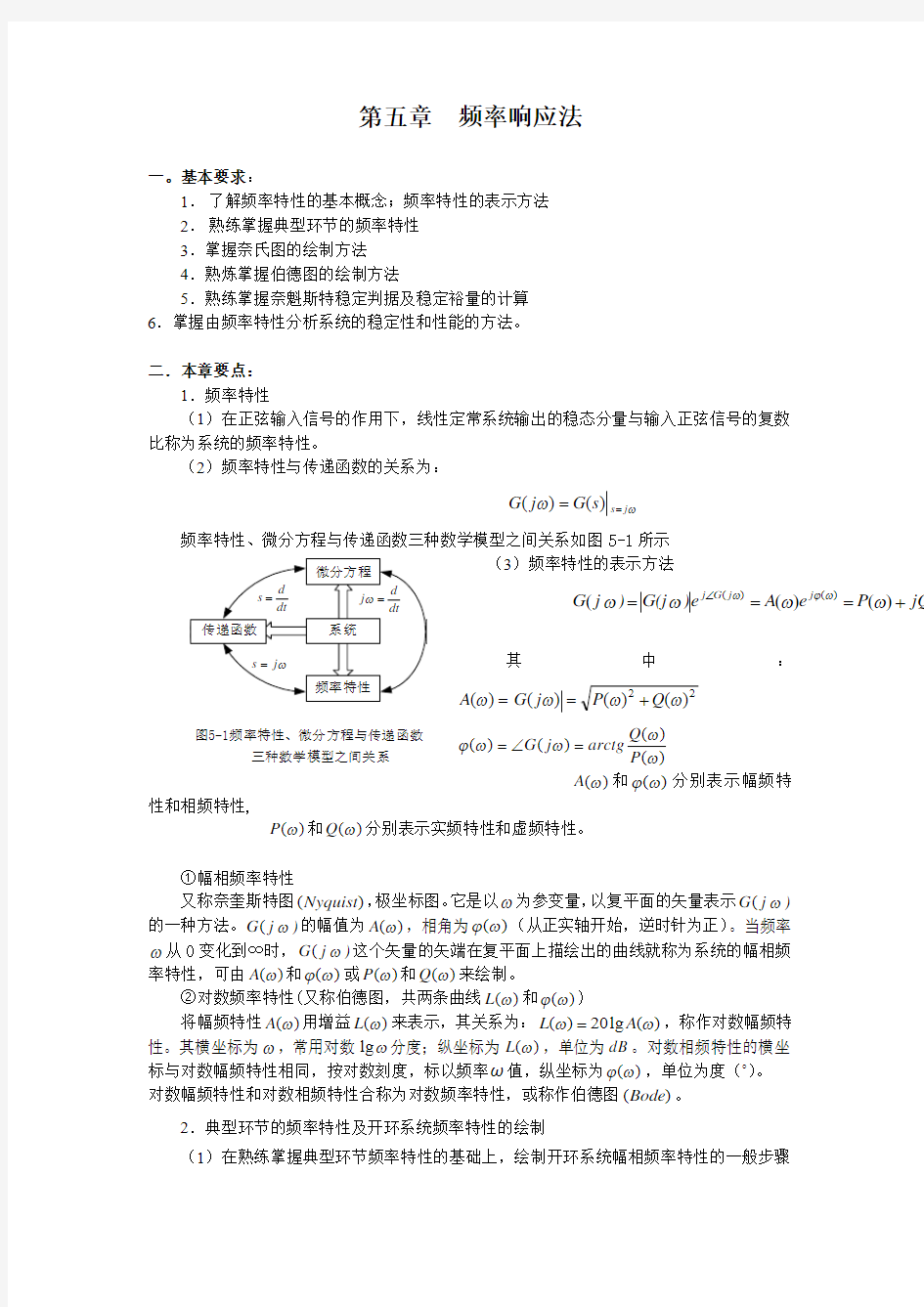
频率特性、微分方程与传递函数三种数学模型之间关系如图5-1所示
(3)频率特性的表示方法 (
)()(()()(ωωωωω?ωjQ P e A e )G(j )j G j j G j +===∠
其
中
: 2
2)()()()(ωωωωQ P j G A +==
)
()
()()(ωωωω?P Q arctg
j G =∠= )(ωA 和)(ω?分别表示幅频特
性和相频特性,
)(ωP 和)(ωQ 分别表示实频特性和虚频特性。
①幅相频率特性 又称奈奎斯特图)(Nyquist ,极坐标图。它是以ω为参变量,以复平面的矢量表示)j G ω(的一种方法。)j G ω(的幅值为)(ωA ,相角为)(ω?(从正实轴开始,逆时针为正)。当频率ω从0变化到∞时,)j G ω(这个矢量的矢端在复平面上描绘出的曲线就称为系统的幅相频率特性,可由)(ωA 和)(ω?或)(ωP 和)(ωQ 来绘制。
②对数频率特性(又称伯德图,共两条曲线)(ωL 和)(ω?)
将幅频特性)(ωA 用增益)(ωL 来表示,其关系为:)(lg 20)(ωωA L =,称作对数幅频特性。其横坐标为ω,常用对数ωlg 分度;纵坐标为)(ωL ,单位为dB 。对数相频特性的横坐
标与对数幅频特性相同,按对数刻度,标以频率ω值,纵坐标为)(ω?,单位为度(o
)。 对数幅频特性和对数相频特性合称为对数频率特性,或称作伯德图)(Bode 。
2.典型环节的频率特性及开环系统频率特性的绘制
(1)在熟练掌握典型环节频率特性的基础上,绘制开环系统幅相频率特性的一般步骤
图5-1频率特性、微分方程与传递函数
三种数学模型之间关系
为:
①写出开环系统的幅频特性)(ωA 、相频特性)(ω?及实频特性)(ωP 和虚频特性)(ωQ ; ②利用幅频特性)(ωA 、相频特性)(ω?求出0→ω和∞→ω时的幅值和相角,确定幅相频率特性的起点(0=ν型系统:起点为 0∠K ;0>ν型系统:起点为ν 90-∞∠,特别是1=ν型系统,其低频段渐进线为)(lim 0
ωσωP x →=)和终点()(900m n --∠ )。
③利用实频特性)(ωP 和虚频特性)(ωQ 求出幅相频率特性与实轴和虚轴的交点(包括交点对应的频率),特别是与实轴的交点对于系统稳定性的判别有重大意义。
令0)(=ωP ,求出ω,代入)(ωQ 中,即可求出)j G ω(与虚轴的交点与对应的频率; 令0)(=ωQ ,求出ω,代入)(ωP 中,即可求出)j G ω(与实轴的交点与对应的频率。 ④按顺时针方向,从起点开始,中间通过几个关键点到达终点。(在此没有考虑零点及非最小相位情况)
(2)绘制开环系统对数频率特性的一般步骤为:
①将系统的开环传递函数分解为若干典型环节相乘的形式; ②画出每个典型环节的对数频率特性曲线)(ωi L 和)(ω?i ;
③分别对它们进行代数相加,即可得到开环系统的对数频率特性曲线)(ωL 和)(ω?。 3.奈奎斯特稳定判据及稳定裕量
(1)奈奎斯特稳定性判据
①当开环系统稳定时,如果相应于ω从-∞→+∞变化时的奈氏曲线)()(ωωj H j G 不包围 (-1,j0)点,则闭环系统是稳定的,否则就是不稳定的。
②当开环系统不稳定时,说明系统的开环传递函数)()(s H s G 有p 个极点位于s 平面的右半部分,如果当ω从—∞→+∞变化时的奈氏曲线逆时针包围)0,1(j -点的次数p N =,则闭环系统是稳定的,否则(即p N ≠),闭环系统就是不稳定的。
③如果奈奎斯特曲线正好通过)0,1(j -点,这表明闭环系统有极点在s 平面的虚轴上,则闭环系统处于临界稳定状态,这种情况一般也认为是不稳定的。
为简单起见,奈氏曲线通常只画ω从0→+∞变化的曲线的正半部分,另外一半曲线以实轴为对称轴。
应用奈奎斯特稳定性判据判别闭环系统稳定性的一般步骤如下:
①绘制开环频率特性)()(ωωj H j G 的奈氏图,作图时可先绘出对应于ω从0→+∞的—段曲线,然后以实轴为对称轴,画出对应于—∞→0的另外一半。
②计算奈氏曲线对点)0,1(j -的逆时针包围次数N 。为此可从)0,1(j -点向奈氏曲线上的点作一矢量,并计算这个矢量当ω从-∞→0→+∞时转过的净角度,并按每转过 360为一次的方法计算N 值。
③由给定的开环传递函数)()(s H s G 确定位于s 平面右半部分的开环极点数p 。 ④应用奈奎斯特判据判别闭环系统的稳定性。 (2)稳定裕量
用相位裕量和增益裕量来定量的表示系统的相对稳定性,它们也是系统的频率域性能指标。相位裕量和增益裕量如图5-2所示。
①增益裕量g K
)()(1
g g g
j H j G K ωω=
令πω?
-=)(g ,可求得g ω。增益裕量g K 表明:若系统的开环增益K 增加g K 倍,则闭环系统
达到临界稳定状态。实 际中常用对数增益裕量dB A K g g )(lg 20lg 20ω-=表示。
图5-2相位裕量和增益裕量 ②相位裕量γ
)(1800c ω?γ+=
令0)(=c L ω或1)(=c A ω,可求得c ω。
显然,当 0>γ及1>g K 时,闭环系统是稳定的。一般当030≥γ,dB K g 6>时,控制系统可以得到较为满意的动态性能。
4.系统的伯德图可分成三个频段:
低频段(0→ω)反映了系统的稳态性能,中频段(c ω附近,斜率为dec dB 20-)反映了系统的动态性能,高频段(∞→ω)则反映了系统抗高频干扰的能力。 三.典型例题分析:
[例5-1]已知系统开环传递函数为:)
1(1
)(+=
Ts s s G ,试绘制其极坐标图。
解:显然,系统为I 型系统,0,2==m n ,因此其极坐标图的起点为 90-∞∠,以
180)(90-=--m n 的方向进入坐标原点。由系统的开环传递函数可写出其开环频率特性
为:
)
1(1
1)1(1)(2222T j
T T T j j j G ωωωωωω+-+-=+=
ωω?ωωωarctgT T A --=+=
02
290)(11
)(
当0→ω时:∞→)0(A ,090)0(-=?
当∞→ω时:0)(→∞A ,0
180)(-=∞?
图5-3 极坐标图 又因为
)
1(1
)(1)(222
2
T Q T
T
P ωωωωω+-
=+-
=
所以 ()T P x -==→ωσω0
lim ()∞=→ωωQ 0
lim
注:I 型系统需要求渐进线)(lim 0
ωσωP x →=,来确定其极坐标图低频段的位置。极坐标图如
图5-3所示。
[例5-2]已知系统开环传递函数为:
)
12.0)(12)(110()()(+++=
s s s K
s H s G
试求:(1)20=K 时,分析系统稳定性;
(2)100=K 时,分析系统稳定性;
(3)分析开环放大倍数K 的变化对系统稳定性的影响。
解:显然,系统为0型系统,0,3==m n ,因此其极坐标图从正实轴出发,以
270)(90-=--m n 的方向进入坐标原点。
系统的开环频率特性为:
)
41)(1001(1()4.221[()2.01)(21)(101()()(222ωωωωωωωω+++-=
+++=j K j j j K
j H j G
令 0)
04.01)(41)(1001()
42.12()(2
223=+++-=ωωωωωωK Q 图5-4(a) 极坐标图 即, 042.123
=-ωω
得: 01=ω,对应极坐标图的起点;
05.32=ω,对应极坐标图与负实轴的交点
代
入
)
04
.01)(41)(1001()
4.221()(2222ωωωωω+++-=
K P 中 得: K P 015.0)(-=ω
图5-4 (b) 极坐标图
(1)20=K 时:3.0)(-=ωP ,极坐标图如图5-4(a)所示。
0=P 而 0=N ,故0=Z ,闭环系统稳定。 (2)100=K 时:5.1)(-=ωP ,极坐标图如图5-4(b)所示。
0=P 而 2=N ,故2=Z ,闭环系统不稳定,
且右半平面有两个闭环极点。
(3)由(1)和(2)可见,增大开环放大倍数K ,系统的稳定性会下降,甚至会不稳定。当1015.0)(=-=K P ω时,即67≈K 时,闭环系统处于临界稳定状态。
[例5-3]系统开环传递函数为:
)
101.0(320
)()(+=
s s s H s G
试绘制伯德图。
解:由已知条件可知,系统为I 型系统,
320,0,2===K m n ,系统开环传递函数可以分解
为:
1
01.01
320)()(+?=
s s s H s G
由于惯性环节的转折频率为:
32010001
.01
<==
ω 故对数幅频特性低频段的斜率为dec dB /20-,其
延长线与横轴的交点为320;当100=ω时,对数幅频特性的斜率
由dec dB /20-变为dec dB /40-。而对数相频特性为:
ωπ
ω?01.02
)(arctg --
=
图5-5 对数频率特性 伯德图如图5-5所示。
[例5-4]系统开环传递函数:
)
1.01)(6.01)(201()
1(40)(s s s s s G ++++=
试绘制伯德图。
解:系统为0型系统,
40,1,3===K m n ,系统开环传递函数
可以分解为:
1(1.011
6.011201140)(s
s
s s s G +?+?+?+?
=
故对数幅频特性低频段为一水平直线,其高度为dB K 32log 20=,其它各环
-90-
--+
节的转折频率分别为:
11=ω, 05.02012==
ω,67.16.013==ω,101
.014==ω;因此对数幅频特性在05.0=ω时,斜率由d ec dB /0变为d ec dB /20-,1=ω时,斜率由d ec dB /20-变为
d e c dB /0,67.1=ω时,斜率由dec dB /0变为dec dB /20-,10=ω时,斜率由dec dB /20-变为dec dB /40-。而对数相频特性为:
ωωωωω?1.06.020)(arctg arctg arctg arctg ---=
图5-6 对数频率特性 伯德图如图5-6所示。
[例5-5]某系统开环传递函数:
)
5)(1()()(1
++=
s s s K s H s G
试求:(1)试绘制101=K 时的伯德图,并求γ及g K ;
(2)分析开环放大倍数K 的变化对系统稳定性的影响。
解:(1)101=K 时,系统开环传递函数转化为:
)
12.0)(1(2
)()(++=
s s s s H s G
K K 51=
系统为I 型系统,2,0,3===K m n ,系统开环
传递函数可以分解为: 1
2.01
112)()(+?
+?=
s s s s H s G 转折频率为:11=ω,52
.01
2==ω 则伯德图如图5-7所示。
图5-7 对数频率特性 ①令0)(=c L ω,即1)(=c A ω,可求得c ω:
由图5-7
可知:11
1
1==
>T c ωω,则1
1)1
(
2c
c
ωω≈
+
51
22==
(2≈+c ω 所以有: 2222 1 1 2 11 )5 ( 1)1 ( 2 )(c c c c c c c A ωωωωωωω= ?? ≈=++= 22≈c ω, 414.12=≈c ω 000005.1608.157.54902.090)(-=---=---=c c c arctg arctg ωωω? 00005.195.160180)(180=-=+=c ω?γ ②令0180)(-=g ω?,可求得g ω : 001802.090)(-=---=g g g arctg arctg ωωω? , 02 902.012.12.0=-=+g g g g arctg arctg arctg ωωωω 所以 02.012 =-g ω, 即 24.25==g ω 32 1 )5 (1)1 ( ) (122=++= = g g g g g A K ωωωω 由于 0>γ及1>g K ,所以闭环系统是稳定的。 (2)由于增益裕量g K 表明:若系统的开环增益K 增加g K 倍,则闭环系统达到临界稳定状态,所以增大开环放大倍数K ,系统的稳定性会下降,当6322=?=?=g K K ,即301=K 时系统达到临界稳定状态,当301>K 时系统不稳定。 [例5-6]已知某单位负反馈最小相位系统的对数幅频特性曲线如图5-8所示,试: (1)写出该系统的开环传递函数; (2)求该系统的剪切频率c ω和相位裕量γ。 解:(1)根据对数幅频特性曲线图可知,低频段的斜率为dec dB /40-,故系统为Ⅱ型;当51=ω时,斜率由 dec dB /40-变为dec dB /20-,故2 .01 1 1== ωT 为一阶比例微分环节的时间常数;当1002=ω时,斜率由 dec dB /20-变为dec dB /40-,故01.01 2 2== ωT 为惯性环节的时间常数;当1=ω时, 40log 20)(1===K L ωω, 图5-8 最小相位系统伯德图 即100=K ,所以系统的开环传递函数为: ) 101.0() 12.0(100) 1()1()()(2 221++= ++= s s s s T s s T K s H s G (2)令0)(=c L ω, 即 11 )100 ( 1 )5 (1001 )01.0(1 )2.0(100)(2222 2 2 =++= ++= c c c c c c c A ωωωωωωω 亦即: 11 51002≈?? c c ωω 可求得: 20=c ω 00002.1086.124.841802001.0202.0180)(-=-+-=?-?+-=arctg arctg c ω? 00008.712.108180)(180=-=+=c ω?γ, 由于 0>γ,所以闭环系统是稳定的。 [例5-7]已知某自动控制系统如图5-9(a)所示,试: 图5-9(a) 控制系统框图 (1)写出该系统的开环传递函数; (2)绘制该系统的伯德图; (3)求出γ并判断系统稳定性; (4)当)(14)(t t r ?=时,求系统的ss e 。 解:(1)该系统的开环传递函数: 05 .0()101.0)(105.0(01 .044010)()(= ++???= s s s H s G (2)绘制该系统的伯德图 该系统为0型系统,低频段为一水平线,且当1=ω时,dB L 2416log 20)(1===ωω;两个惯性环节的转 折频率分别为: 2005.011== ω,10001 .012==ω 伯德图如图5-9(b)所示。 图5-9(b) 系统的伯德图 (3)求出γ并判断系统的稳定性 ①令0)(log 20)(==c c A L ωω,即 11 )100 ( 1)20 ( 16 )(22=++= c c c A ωωω, 近似后: 1100 20 16 ≈? c c ωω 可求得:1791002016≈??=c ω ② 0004.1448.606.8317901.017905.0)(-=--=?-?-=arctg arctg c ω? 00006.354.144180)(180=-=+=c ω?γ 由于 0>γ,所以闭环系统是稳定的。也可以用奈氏判据判断:根据系统的开环传递函数可知0=P ,从系统的伯德图上可以看出0==-+N N ,由P Z N N -=-+-)(2可以计算出0=Z ,即分布在S 右半平面的系统闭环极点的个数为零,也就是说系统的所有闭环极点均 位于S 的左半平面,所以闭环系统是稳定的。 (4)当)(14)(t t r ?=时,求ss e : 显然0,4===c b a ,则 p a v p ss K K c K b K a e +=+++= 14 1 -- 而 16) 101.0)(105.0(16 lim )()(lim 00 =++==→→s s s H s G K s s p 所以 17 4 1614=+=ss e 四.习题 5-1.系统的开环传递函数为 )()(s H s G = ) 1001.0)(10025.0)(105.0() 10167.0(500++++s s s s s , 试求:①绘制系统伯德图; ②确定闭环系统的稳定性; ③求幅值裕度和相位裕度。 5-2.系统的开环传递函数为 )()(s H s G = ) 1006.0)(1025.0() 12.0(752 +++s s s s , 试求:①绘制系统伯德图; ②确定闭环系统的稳定性; ③求幅值裕度和相位裕度。 5-3.设单位反馈系统开环传递函数为 ) 12.0)(1(10 )(++= s s s s G , 试计算系统的c ω和相位裕量γ。 5-4.设某控制系统开环传递函数: ) 15.0)(11.0()(++= s s s K s G , 试求:①绘制系统伯德图; ②确定使系统临界稳定性的K 值。 5-5.已知环节的对数幅频特性渐近线如图5-10所示,试写出它们的传递函数。 图5-10 对数幅频特性渐近线 5-6.已知某随动控制系统如图5-11所示,图中) (s G c 的为检测环节与串联校正环节的传递函数,现设 s T s T k s G c 1 1 1 )1 ( ) ( + =, 其中s T k5 .0 , 10 1 1 = =,试: 图5-11 随动控制系统框图(1)写出该系统的开环传递函; (2)绘制该系统的伯德图; (3)求出γ并判断系统稳定性; (4)当t t r4 3 ) (+ =时,求系统的 ss e。 5-7.设系统开环频率特性的极坐标图如图5-12所示,试判断闭环系统的稳定性。 图5-12 极坐标图 第五章习题与解答5-1试求题5-1图(a)、(b)网络的频率特性。 u r R1 u c R2 C R2 R1 u r u c (a) (b) 题5-1图 R-C网络 解(a)依图: ? ? ? ? ?? ? ? ? + = = + = + + = + + = 2 1 2 1 1 1 1 2 1 2 1 1 1 1 1 1 2 2 1 )1 ( 1 1 ) ( ) ( R R C R R T C R R R R K s T s K sC R sC R R R s U s U r cτ τ ω ω τ ω ω ω ω ω 1 1 1 2 1 2 1 2 1 2 1 ) 1( ) ( ) ( ) ( jT j K C R R j R R C R R j R j U j U j G r c a+ + = + + + = = (b)依图: ? ? ? + = = + + = + + + = C R R T C R s T s sC R R sC R s U s U r c ) ( 1 1 1 1 ) ( ) ( 2 1 2 2 2 2 2 2 1 2τ τ ω ω τ ω ω ω ω ω 2 2 2 1 2 1 1 ) ( 1 1 ) ( ) ( ) ( jT j C R R j C R j j U j U j G r c b+ + = + + + = = 5-2某系统结构图如题5-2图所示,试根据频率特性的物理意义,求下列输入信号作用时,系统的稳态输出) (t c s 和稳态误差) (t e s (1)t t r2 sin ) (= (2)) 45 2 cos( 2 ) 30 sin( ) (? - - ? + =t t t r 题5-2图反馈控制系统结构图 第五章系统的频率特性分析 本章目录 5.1 频率特性 5.2 对数坐标图 5.3 极坐标图 5.4 乃奎斯特稳定判据 5.5 相对稳定性分析 5.6 频域性能指标和时域性能指标的关系 小结 本章简介 在经典的控制系统分析方法中,有两种基本方法是可以不需解微分方程而可对控制系统的性能进行分析和校正的:其一是上一章的根轨迹法,其二即本章介绍的频率特性分析法。频率响应法是一种工程方法,是以传递函数为基础的一种控制系统分析方法。这种方法不仅能根据系统的开环频率特性图形直观地分析系统的闭环响应,而且还能判别某些环节或参数对系统性能的影响,提示改善系统性能的信息。控制系统的频域分析方法不仅可以对基于机理模型的系统性能进行分析,也可以对来自于实验数据的系统进行有效分析。它同根轨迹法一样是又一种图解法,研究的主要手段有极坐标图(Nyquist图)和伯德图(Bode图)法。 与其它方法相比较,频率响应法还具有如下的特点: 1)频率特性除可以由前述传递函数确定外,也可以用实验的方法来确定,这对于难以列写微分方程式的元部件或系统来说,特别便于工程上的应用。 2)由于频率响应法主要是通过开环频率特性的图形对系统进行分析,因而具有形象直观和计算量较少的特点。 3)频率响应法不仅适用于线性定常系统,而且还适用于传递函数不是有理数的纯滞后系统和部分非线性系统的分析。 由于上述的特点,频率响应法不仅至今仍为控制理论中的一个重要内容,而且它的有关理论和分析方法已经广泛应用于鲁棒多变量系统和参数不确定系统等复杂系统的研究中。 本章我们将在介绍控制系统频率特性的基本概念后,着重于开环控制系统的频率特性分析:极坐标图(Nyquist图)和半对数坐标图(Bode图),同时将应用Matlab工具分析控制系统的频率特性,最后简要分析开环控制系统的频率特性与闭环控制系统的频率特性的关系,并研究它们与控制系统性能指标的关系。 5.1频率特性 频率特性又称频率响应,它是指系统或元件对不同频率的正弦输入信号的响应特性。系统的频率特性可由两个方法直接得到:(1) 机理模型—传递函数法;(2) 实验方法。 5.1.1 由传递函数求系统的频率响应 设系统的开环传递函数 (5—1) 对应的频率特性为 (5—2) 如果在S平面的虚轴上任取一点,把该点与的所有零、极点连接成向量,并将这些向量分别以极坐标的形式表示: 则式(5-3)可改写为 (5-3) 由上式得到其对应的幅值和相角:自动控制原理 第五章频率响应分析法习题及答案
第五章:频率响应法
相关主题
文本预览