电动汽车驱动电机匹配设计 目录 1 概述 (1) 2 世界电动汽车发展史 (2) 3 电驱动系统的基本要求 (5) 3.1电驱动系统结构 (5) 3.2电机的基本性能要求 (6) 4 电动汽车基本参数参数确定 (7) 4.1电动汽车基本参数要求 (7) 4.2 动力性指标 (7) 5 电机参数设计 (7) 5.1 以最高车速确定电机额定功率 (7) 5.2 根据要求车速的爬坡度计算 (8) 5.3 根据最大爬坡度确定电机的额定功率 (9) 5.4 根据额定功率来确定电机的最大功率 (9) 5.5 电机额定转速和转速的选择 (9) 6 传动系最大传动比的设计 (10) 7 电机的种类与性能分析 (11) 7.1 直流电动机 (11) 7.2交流三相感应电动机 (11)
7.3 永磁无刷直流电动机 (11) 7.4 开关磁阻电动机 (12) 8 电机的选择 (13) 9 电机其他选择与设计 (15) 9.1 电机形状位置设计 (15) 9.2 电机冷却设计 (15) 10 总结与展望 (17) 10.1 总结 (17) 10.2 问题与展望 (17) 致谢 (18) 参考文献 (19) 1.概述 汽车工业在促进世界经济飞速发展和给人们生活提供便利的同时,又展现出了其双刃剑的另一面,它将能源与环境问题推到了日益尴尬的处境。“能源、环境和安全”成为了21世纪世界汽车工业发展的3大主题。其中,能源与环境问题作为全球面临的重大挑战和制约汽车工业可持续发展的症结所在,更成为重中之重。电动汽车使用电能作为动力能源,而电能具有来源广、清洁无污染等特点。电动汽车被公认为21世纪重要的交通工具。 电动汽车是指汽车行驶的动力全部或部分来自电机驱动系统的汽车,它主要以动力电池组为车载能量源,是涉及机械、电子、电力、微机控制等多学科的高科技技术产品。按照汽车行驶动力来源的不同,一般将电动汽车划分为纯电动汽车(Pure Electric Vehicle,PEV)、混合动力电动汽车(Hybrid Electric Vehicle,HEV)、插电式混合动力电动汽车(Plug-in Hybrid Electric Vehicle,PHEV)和燃料电池电动汽车(Fuel Cell Electric Vehicle,FCEV)4种基本类型。 自1881年法国电气工程师Gustave Trouve制造出首辆电动汽车开始,电动汽车经历了曲折起伏的几个发展阶段,其中的决定因素就是动力电池技术和人们
电动汽车与传统内燃机汽车之间的主要差别是采用了不同的动力源,它由蓄电池提供电能,经过驱动系统和电动机,驱动电动汽车行驶。电动汽车的能量供给和消耗,与蓄电池的性能密切相关,直接影响电动汽车的动力性和续驶里程,同时影响电动汽车行驶的成本效益。 电动汽车在行驶中,由蓄电池输出电能给电动机,用于克服电动汽车本身的机械装置的内阻力,以及由行驶条件决定的外阻力。电动汽车在运行过程中,行驶阻力不断变化,其主电路中传递的功率也在不断变化。对电动汽车行驶时的受力状况以及主电路中电流的变化进行分析,是研究电动汽车行驶性能和经济性能的基础。 1、电动汽车的动力性分析 1.1 电动汽车的驱动力 电动汽车的电动机输出轴输出转矩M,经过减速齿轮传动,传到驱动轴上的转矩Mt,使驱动轮与地面之间产生相互作用,车轮与地面作用一圆周力F0,同时,地面对驱动轮产生反作用力Ft.Ft 与F0大小相等方向相反,Ft方向与驱动轮前进方向一致,是推动汽车前进的外力,将其定义为电动汽车的驱动力。有: 电动汽车机械传动装置是指与电动机输出轴有运动学联系的减速齿轮传动箱或变速器、传动轴及主减速器等机械装置。机械传动链中的功率损失包括:齿轮啮合点处的摩擦损失、轴承中的摩擦
损失、旋转零件与密封装置之间的摩擦损失以及搅动润滑油的损失等。 1.2 电动汽车行驶方程式与功率平衡 电动汽车在上坡加速行驶时,作用于电动汽车的阻力与驱动力始终保持平衡,建立如下的汽车行驶方程式: 以电动汽车行驶速度va乘以(2)式两端,考虑机械损失,再经过单位换算之后可得: 或 由(4)、(5)两式可以看出,电动汽车在行驶时,电动机传递到驱动轮的输出功率与体现在驱动轮上的阻力功率始终保持平衡。将(4)变换可得: 式中PM为电动机的输出功率。 用曲线图表示上述功率关系,将电动机的输出功率、汽车经常遇到的阻力功率与对应车速的关系归置在x-y坐标图上得到电动汽车功率平衡图如图1所示。
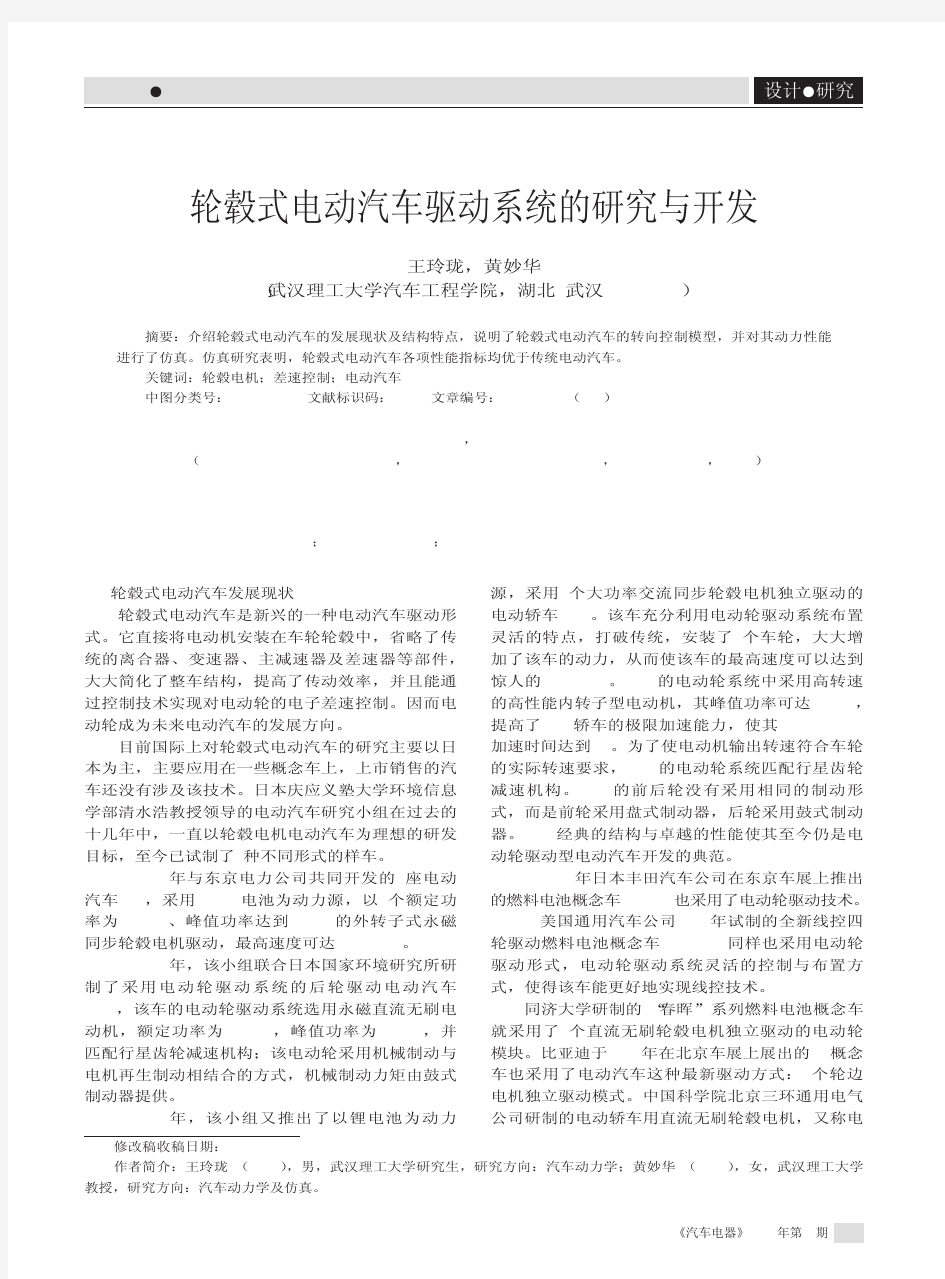
纯电动汽车的结构分析和驱动系统性能比较 摘要 纯电动汽车驱动形式有很多种,为了选择最合适的驱动系统,我们对不同驱动系统的结构特征进行了分析,在纯电动汽车上匹配不同的驱动系统后比较其动力性;以城市驾驶循环为例建立车辆能耗模型来比较其经济性。结果显示:单电机直接驱动系统虽然最简单,但其性能最差;装配两速变速器后,动力性显著改善,汽车行驶里程增加3.6%,但自动变速的功能难以解决;采用轮毂电机驱动系统可以改善汽车的动力性,但实际行驶效率不高;而双电机耦合驱动系统可以实现高效率行驶,其行驶里程比单电机直驱增加了7.79%,并且因为其具有结构简单,行驶效率高等特点,所以适用于现在的纯电动汽车。 绪论 作为核心部件,电力驱动系统的技术水平直接制约纯电动汽车的整体性能。如今,有多种驱动系统可以使用。根据车轮驱动扭矩的动力源,驱动系统的模式可分为整体式驱动和分布式驱动。整体式驱动系统的驱动扭矩由主减速器或次级减速器或差速器来调节,主要包括单电机直驱和主副电机耦合系统。在分布式驱动中,每个驱动轮都有一个单独的驱动系统,轮毂电机驱动系统是分布式驱动的主要形式。 整体式驱动的技术相对比较成熟,但驱动力通过差速器被大致平均分配到左、右半轴,单个驱动轮的转矩在大多数车辆中不能独立地调节。因此不安装其他的传感器和控制器,我们很难对汽车的运动和动力进行控制[1]。分布式驱动近几年飞速发展,由于大多数车轮和电动机之间的机械部件被替换,因此分布式驱动系统具有结构紧凑和传动效率高的优点[2]。 为了选取最适合纯电动汽车的驱动方式,本文对不同驱动系统的结构特征和动力性经济性比较进行了比较说明。本文结构如下:第二部分为驱动系统的结构特征分析,第三部分介绍驱动系统的参数和部件性能,第四部分比较不同驱动系统的动力性,第五部分比较不同驱动系统的经济性,第六部分得出结论。 结构分析 整体式驱动 整体式驱动系统被广泛应用于各类电动车辆,其主要结构如图1所示。其中M是电动机,R是固定速比减速器,T是变速器,D是主减速器,W是车轮。图1 a是单电机直驱系统,其扭矩由主减速器调节,通常称为直驱系统。图1 b和直驱系统十分相似,除了扭矩由变速器调节。因为驱动电机的速比调节范围比内燃机的更大,所以能以较少的齿轮数目的传动来满足在任何工况下的电动汽车需求。图1 c是另外一种整体式驱动形式,其采用两个驱动电机和主减速器,其中一个电机在大多数工况下作为汽车的动力来源,另外一个电机只有在需要附加功率时才会工作。
XH-JS-04-013 电动汽车动力匹配计算设计规范 编制:年月日 审核:年月日 批准:年月日 XXXX有限公司发布
目录 一、概述 (1) 二、输入参数 (1) 2.1 基本参数列表 (1) 2.2 参数取值说明 (1) 三、XXXX动力性能匹配计算基本方法 (2) 3.1 驱动力、行驶阻力及其平衡 (3) 3.2 动力因数 (6) 3.3 爬坡度曲线 (6) 3.4 加速度曲线及加速时间 (7) 3.5 驱动电机功率的确定 (7) 3.6 主驱动电机选型 (8) 3.7 主减速器比的选择 (8) 参考文献 (9)
一、概述 汽车作为一种运输工具,运输效率的高低在很大程度上取决于汽车的动力性。动力性是各种性能中最基本、最重要的性能之一。动力性的好坏,直接影到汽车在城市和城际公路上的使用情况。因此在新车开发阶段,必须进行动力性匹配计算,以判断设计方案是否满足设计目标和使用要求。 二、输入参数 2.1 基本参数列表 进行动力匹配计算需首先按确定整车和发动机基本参数,详细精确的基本参数是保证计算结果精度的基础。下表是XXXX动力匹配计算必须的基本参数,其中发动机参数将在后文专题描述。 表1动力匹配计算输入参数表。 2.2 参数取值说明 1)迎风面积 迎风面积定义为车辆行驶方向的投影面积,可以通过三维数模的测量得到,三维数据不健全则通过设计总布置图测得。XXXX车型迎风面积为A
一般取值5-8 m 2 。 2)动力传动系统机械效率 根据XXXX 车型动力传动系统的具体结构,传动系统的机械效率T η主要由主驱动电机传动效率、传动轴万向节传动效率、主减速器传动效率等部分串联组成。 采用有级机械变速器传动系的车型传动系统效率一般在82%到85%之间,计算中可根据实际齿轮副数量和万向节夹角与数量对总传动效率进行修正,通常取传动系统效率T η值为78-82%。 3)滚动阻力系数f 滚动阻力系数采用推荐的客车轮胎在良好路面上的滚动阻力系数经验公式进行匹配计算: f =??? ???????? ??+??? ??+4 410100100a a u f u f f c 其中:0f —0.0072~0.0120以上; 1f —0.00025~0.00280; 4f —0.00065~0.002以上; a u —汽车行驶速度,单位为km/h ; c —对于良好沥青路面,c =1.2。 三、 XXXX 动力性能匹配计算基本方法 汽车动力性能匹配计算的主要依据是汽车的驱动力和行驶阻力之间的平衡关系,汽车的驱动力-行驶阻力平衡方程为 j i w f t F F F F F +++= (1)
电动汽车驱动控制系统设计 摘要 驱动系统是电动汽车的心脏,也是电动汽车研制的关键技术之一,它直接决定电动汽车的性能,本文根据异步电动机矢量控制理论,结合电动汽车的实际要求,研究设计基于无速度传感器矢量控制的电动汽车驱动系统。矢量控制通过坐标变换将定子电流矢量分解为转子磁场定向的两个直流分量并分别加以控制,从而实现异步电动机磁通和转矩的解耦控制,已达到直流电动机的控制效果。最后,在Matlab环境中建立了仿真系统,验证了无速度传感器矢量控制系统原理应用于电动汽车驱动系统的可行性。 关键词:电动汽车;驱动系统;异步电动机;无速度传感器矢量控制
ABSTRACT Driving system is the heart of EV and one of the key parts of the vehicle that determines the performance of the EV directly. According to the control technique、the method of induction motor drive system and based on the factual requirement of EV, the speed sensorless vector control was designed in this article. By transforming coordinate, the stator current is decomposing two DC parts which orientated as the rotator magnetic field and controlled respectively, So magnetic flux and torque are decoupled. It controls the asynchronous motor as a synchronous way. Finally, intimation system is established in the environment of Matlab to validate these control arithmetic. The system proved its enormous practical value of application. Key words: EV; Drive system; Induction motor; speed sensorless vector control
1 轮毂电机系统的概念与应用领域 轮毂电机系统是本文提出的概念。通常,人们称其为轮毂电机,也有的研究者称其为轮式电机、车轮电机或者电动轮,英文名称以“in-wheel motor”居多,也有称“wheel motor”和“wheel direct drive motors”的。实际上,以上称谓严格来说都是不准确的。“轮毂电机、轮式电机和车轮电机”都侧重于电机,而“电动轮”侧重于车轮。若从系统观点出发,我们所指确切应为驱动电机和车轮紧密集成而形成的一体化的多功能系统,即为“integrated motor and wheel system”。为了方便起见,本文对已经被工程界广泛应用的“轮毂电机”和“in-wheel motor”稍作修改,以“轮毂电机系统”和“in-wheel motor system”作为中英文称谓。 轮毂电机系统在各种交通工具中都有应用。不同的应用场合对轮毂电机的结构型式和技术性能等都提出了不同的要求,相应的产生了各种轮毂电机系统及其特色技术。本文的主要研究对象是汽车用轮毂电机系统。 2 轮毂电机系统的发展历史 轮毂电机系统的诞生可以一直追溯到电动汽车诞生的初期,而轮毂电机在电动汽车上的广泛应用主要集中在近几年的概念车上。 最早见诸于文献的有关轮毂电机及其应用来自于著名汽车公司保时捷的创始人保时捷(F. Porsche)。1900年,保时捷研制了两个前轮装备轮毂电机的前轮驱动双座电动汽车,并在电动汽车比赛中取得了最好的成绩。图2所示为保时捷研制的轮毂电机驱动电动汽车。值得引起注意的是,保时捷在1902年就研制出了采用发动机和轮毂电机的混合动力汽车,取得山地汽车拉力赛的好成绩。1910年,保时捷研制了军用陆地列车,最前面的机车装备发动机和发电机,后面的10辆列车利用轮毂电机驱动(图3)。可以说,保时捷是基于轮毂电机的电动汽车和混合动力汽车之父。 20世纪50年代,美国人罗伯特发明了电动汽车轮毂,并申请了专利。1968年这种轮毂被通用电器公司应用在大型矿用自卸车上。采用轮毂电机的电动汽车具有一个明显的优点,就是可以采用采用扁平的车架结构,因此在需要频繁上下车的城市公共交通客车上大量应用。图所示为许多汽车公司研制的低车架和低地板公交车上应用的轮毂电机结构。 轮毂电机系统驱动作为电动汽车的一种重要驱动形式,得到了各大汽车厂商和组织的重视。自90年代起,日本就推出了一系列轮毂电机系统驱动的电动汽车,如TEPCO的IZA,NIES的Eco,Luciole等等,最近又有三菱的Colt、Lancer Evolut MIEV,本田的FCX concept等新车型。通用自2002年开始推出的概念车AUTOnomy(自主魔力)、Squel采用的都是轮毂电机系统驱动。与此同时,各大厂商加大了对轮毂电机系统的研发力度,高性能的新型轮毂电机系统不断涌现,轮毂电机的门
新能源汽车 6 结语 纯电动乘用车的总布置设计工作是个系统工 程,需要协调车身、动力系统、电池、内外饰、造型等相关部门。如何在确保整车性能的基础上,提高空间利用率,避免各部件的干涉,加快项目进行,需要进行科学的论证,同时,总布置工程师也需要对整车性能、驱动电机、动力电池、高压安全等相关知识相当熟悉,才能合理进行布置,推动项目进展。 参考文献 1 Mehrdad Ehsani,Yi m in Gao,A li Emadi .Modern electric \hy 2bird electric and fuel cell vehicles .CRC Press,2009. 2 王刚,周荣.电动汽车充电技术研究[J ].农业装备与车辆 工程,2008,(6). 3 徐性怡.电动汽车用电机控制器的设计方法与实践[J ],2009,(6). 4 姬芬竹,高峰.电动汽车传动系参数设计及动力性仿真[J ].北京航空航天大学学报,2006. 5 赵云.电动汽车结构布置及设计[J ].汽车电器,2006. 收稿日期:2010-05-05 纯电动汽车驱动系统的参数设计及匹配 张 珍 陈丁跃 刘 栋 (长安大学,西安 710064) 【摘要】 文章系统地介绍了纯电动汽车驱动系统主要部件的选型及根据电动汽车性能要求进行主要参 数的设计及匹配,并通过对具体车型的计算,进一步探讨了主要参数的确定。 【Ab s trac t 】 Choice of the main components of the power train syste m of electric vehicle and de 2 sign and matching of the main para meters according t o require ment of main perfor mance are intr o 2duced .Confir mati on of the main para meters is further discussed thr ough the calculati on t o the s pecific vehicle . 【主题词】 纯电动汽车 驱动系统 参数设计 0 引言 纯电动汽车(EV )是当前研制取代内燃机汽车的首选车型,前景广阔。目前,我国的EV 大都建立在改装车基础上,其设计是一项机电一体化 的综合工程[1] 。改装后的EV 高性能的获得并不是简单地将内燃机汽车的发动机和燃油箱换成电动机和蓄电池便可以实现的,它必须对储能装置、动力装置及变速器、减速器等参数进行合理的匹 配。鉴于目前国内对EV 研究的现状,本文研究是 建立于传统汽车驱动系统基础上。 1 电动汽车的驱动系统的基本结构 1.1 电力驱动的结构形式 采用不同的电力驱动系统可构成不同结构形式E V 。本文研究的E V 的电力驱动结构形式如图 1[2] 所示。1.2 储能装置的结构形式 ? 7? 上海汽车 2010108
新能源电动汽车电驱动 系统 标准化工作室编码[XX968T-XX89628-XJ668-XT689N]
现代电动汽车电驱动系统主要由四大部分组成:驱动电机、变速器、功率变换器和控制器。驱动电机是电气驱动系统的核心,其性能和效率直接影响电动汽车的性能。驱动电机和变速器的尺寸、重量也会影响到汽车的整体效率。功率变换器和控制器则对电动汽车的安全可靠运行有很大关系。 电驱动系统的由以下几个部分组成: 1.电动汽车驱动电机 选用小型轻量的高效电机,对目前电池容量较小、续驶里程较短的电动汽车现状显得尤为重要。早期电动汽车驱动电机大部分采用他励直流电机(DCM)。直流电机驱动系统改变输入电压或电流就可以实现对其转矩的独立控制,进行平滑调速,具有良好的动态特性,并且有成本低、技术成熟等优点。但是,直流电机的绝对效率低,体积、质量大,碳刷和换向器维护量大,散热困难等缺陷,使其在现代电动汽车中应用越来越少。随着电力电子技术、大规模集成电路和计算机技术的发展以及新材料的出现和现代控制理论的应用,机电一体化的交流驱动系统显示了它的优越性,如效率高、能量密度大、驱动力大、有效的再生制动、工作可靠和几乎无需维护等,使得交流驱动系统开始越来越多地应用于电动汽车中。目前在电动汽车中,主要采用永磁同步电机(PMSM)驱动系统、开关磁阻电机(SRM)驱动系统和异步感应电机(肼)驱动系统。 永磁同步电机(PMSM)是一种高性能的电机,具有体积小、重量轻、结构简单、效率高、控制灵活的优点,在电动汽车上得到了广泛的应用,是当前电动汽车用电动机的研发热点,是异步感应电机的最有力的竞争对手。目前,由日本研制的电动汽车主要采用这种电机,如Honda公司的EV Plus、Nissan公司的Altra和Toyota公司的RAV4及Prius车型等。但是,永磁电机的磁钢价格较高,磁性能受温度振动等因素的影响,有高温退磁等问题。 开关磁阻电机(SRM)是由磁阻电机和开关电路控制器组成的机电一体化新型调速电机。开关磁阻电机工作时,依次使定子线圈中的电流导通或截止,电流变化形成的磁场吸引转子的凸出磁极从而产生转矩。开关磁阻电机结构简单,成本较低,可靠性高,起动性能和调速性能好,控制装置也比较简单。然而在实际应用中,开关磁阻电动机存在着转矩波动大、噪声大、需要位置检测器等缺点,所以目前应用开关磁阻电机的驱动系统仍然很少,主要以Chloride公司的“Lucas”电动汽车为代表。 异步感应电机(M)具有结构简单、坚固、成本低、可靠性高、转矩脉动小、噪声小、转速极限高、无需位置传感器及免维护等特点,因而在电动汽车驱动电机领域里,是应用很广泛的一种无换向器电机。近年来,由IM驱动的电动汽车几乎都采用矢量控制和直接转矩控制。美国以及欧洲研制的电动汽车多采用这种电动机。 异步电机的矢量控制调速技术也比较成熟,其电驱动系统具有良好的性能,因此被较早地应用于电动汽车,目前仍然是电动汽车驱动系统的主流产品。迄今为止,美国“Impact’’系列、“ETX.2”型,日本“Cedric"、“OTwn"、“FEV"型,德国 “T4”、“190’’型等电动汽车均采用异步感应电机。异步电机的最大缺点是驱动电路复杂,效率比永磁电机和开关磁阻电机低,特别是在轻载运行时效率更低。因此,如何进一步提高异步电机的运行效率,己经成为人们关注的重要课题。 2.变速器
高功率密度盘式轮毂电机集成技术 实能高科 一、轮毂技术国内外现状 轮毂电机技术又称车轮内装电机技术,它的最大特点就是将动力、传动和制动装置都整合到轮毂内,因此将电动车辆的机械部分大大简化。早在1900年,就已经制造出了前轮装备轮毂电机的电动汽车,在20世纪70年代,这一技术在矿山运输车等领域得到应用。作为比较先进的驱动技术,国外有很多研究所和公司都对轮毂电机进行了专项研究,并已经开始将其应用到实际产品中。位于美国加州的通用汽车高级技术研发中心成功地将自行研制的轮毂电机应用到雪弗兰s210皮卡车中。该电机给车轮增加的重量只有约15kg,却可产生约25kW的功率,产生的扭矩比普通的雪弗兰s210四缸皮卡车高出60%,加速性能也有所提高。 通用开发的为150吨的重型卡车设计的轮毂电机(内燃动力电传动)
典型内转子结构的轮毂电机驱动系统结构示意图 日本对轮毂电机研究起步早,技术在世界上处于领先。日本庆应义塾大学清水浩教授领导的电动汽车研究小组在过去10年中,研制的IZA、ECO、KAZ等电动汽车均采用轮毂电机驱动技术。其中后轮驱动电动汽车ECO采用的永磁无刷直流电机,额定功率618kW,峰值功率可达20kW。 本田研发的轮毂电机实物
日本包含丰田在内的各大公司在2003年东京汽车展上纷纷推出自己的轮毂驱动产品,如:普利司通公司的动力阻尼型车轮内装式电机系统、丰田公司的燃料电池概念车FINE2N等等。法国的TM4公司设计的一体化电动轮,采用外转子永磁无刷直流电动机,额定功率为1815kW,额定转矩为950r/min,额定工况下的平均效率可达96.13%,峰值功率可达80kW,峰值扭矩为670N?m,最高转速为1385r/min。 目前国内也有自主品牌汽车厂商开始研发此项技术,在2011年上海车展展出的瑞麒X1增程电动车就采用了轮毂电机技术。 米其林研发的将轮毂电机和电子主动悬挂都整合到轮内的驱动/悬挂系统结构图 轮毂电机驱动系统根据电机的转子型式主要分成两种结构型式:内转子式和外转子式。其中外转子式采用低速外传子电机,电机的最
详解电动汽车传动系统原理、传动方式及拓扑构架设计 随着现代汽车电子技术的发展,新能源汽车、电动汽车的出现无疑给整个行业注入了一股新鲜而且充满挑战性的血液。凭借可以减少很多废弃物、有害气体的排放,对整个社会的生活环境都有很大的改善效果,得到社会及国家的高度的重视,具有很好的发展前景。下面我们就来从电动车的结构引入到电动汽车传动系统,并分析它的工作原理、传动方式、优势等,并简单的列举一些成功的应用案例。电动汽车和普通的汽车不同,它是用车载电源提供行驶的动力,用电机来驱动车轮的运动,而不是用点火装置来提供向前运动的力。我们知道,电动汽车主要是由电力驱动及控制系统、驱动力传动系统、工作装置等各个部分组成。它的工作原理是蓄电池中提供恒定的电流输出,这些恒定的电路通过电力调节器进行一次转换成可以驱动电动机的合适的电流和电压,从而可以驱动整个动力传动系统的正常运行,经过他们之间相互的作用最终给汽车提供可以运行的动力汽车可以正常的行驶。由此可见,电动汽车传动系统的有效性和安全性直接影响着整个系统的运行。电动汽车传动系统原理是直接将电动机的驱动转矩传给汽车的驱动轴。汽车传动轴在采用电动轮驱动时,由于它是靠车载电源提供动力源驱动电动机因而可以实现带负载启动,无需离合器;也正是因为是车载电源可以提供恒定的电流,中间会有电路控制的环境来实现驱动电机的方向和转速的控制,所以不需要倒档和差速器。若采用无级调速,就可以实现自动控制,无需变速器。电动汽车传动系统的传动方式主要有三种:(1)电机+传动轴+后桥(2)电机+变速箱+后桥(3)电机+磁力变矩器+后桥以目前的变速箱技术成熟度而言,除了传统车的变速箱外还没有一款真正成熟的适用于电动汽车的产品,最可靠和适用的传动方式还是电机+传动轴+后桥的直驱方案。当然在具体的设计时,我们需要更具实际情况来设计,包括电机的位置、电源的位置、驱动负载的能力、行驶速度要求、稳定性等这些都需要综合的来考虑。了解车辆效率损失分配即从发动机输出的功率消耗在不同汽车部件上的量及比例。这对改善车辆总体的传动效能非常有用,以达到适当配置资源,改善性能的目的。各种损失,使用安装在车辆适当位置的传感器进行测定。电动汽车传动系统拓扑构架设计汽车动力传动系统采用传统的内燃机和电动机作为动力能源,通过混合使用热能和电能两套系统开动汽车。在低速小功率运行时可以关闭发动机,采用电动机驱动;而高速行驶时用内燃机驱动;通过发动机和电动机的协同工作模式,将车辆在制动时产生的能量转化为电能,并积蓄起来成为新的驱动力量.从而在不同工况下都能达到高效率。一般上有串联式、并联式、混联式和复合式4种布置形式。(1)串联式—下图中采用的电力电子装置只有电机控制器,电池和辅助动力装置都直接并接在电机控制器的入口,属于串联式,车辆的驱动力只来源于电动机。 (2)并联式—下图中是典型的并联式动力系统结构,通常在电池和电机控制器之间安装了一个DC/DC变换器,电池的端电压通过DC/DC变换器的升压或降压来与系统直流母线的电压等级进行匹配。车辆的驱动力由电动机及发动机同时或单独供给。(3)混联式----采用四轮驱动、前后轮分别与不同的驱动系相连,后轮驱动有发动机、后置电机、发电机、变速器等组成,前轮驱动由前置电机、发电机组成。由于它使用不同的驱动方式,所以整个电动汽车传动系统既分离又相关联,可以更好的控制。下图就是一个简单的混联式的拓扑构架。同时具有串联式、并联式驱动方式。(4)复合式---改结构主要集中于双轴混合动力系统中,前轴和后轴独立驱动,前轮和后轮之间没有任何驱动抽或转电力主动型的设计,这种独立的驱动,让传动系统各个部件在运行过程中相互独立控制,因此可以有更好的传输能力。要让整个系统可以更好的运行,除了结构设计方面需要注意之外,还有一个就是电动汽车传动系统的参数设计也需要合理的匹配,这些参数对传动结构的性能影响也是很大的。这一方面的知识,小编在这边文章就不具体介绍了。总结能源问题和环境污染问题是现在社会日益突出的问题,深受国家的重视。因此寻找新能源汽车可以减少废气排放,让能源可以更好的利用在汽车电子设计行业是当务之急。电动汽车正是因为具有上面
几种常用电动汽车的驱动系统的比较及永磁同步电动机的相对优势 2012年1月30日 电动汽车用永磁同步电机的发展分析 彭海涛,何志伟,余海阔 (华南理工夫学电力学院,广州510640) 摘要:简要的比较了几种常用电动汽车的驱动系统,并指出了永磁同步电动机的优势。在各类驱动电机中,永磁同步电机能量密度高,效率高、体积小、惯性低、响应快,有很好的应用前景,介绍了电动车驱动用永磁同步电机的目前研究状况以及目前的研究热点和发展趋势。关键词:电动汽车;永磁同步电机;弱磁控制;控制策略;应用 中圈分类号:TM351, TM341 文献标志码:A 文章编号:1001—6848[2010)06-0078-04 O引言 电动汽车具有低噪声、零排放、高效、节能及能源多样他和综合利用等显著优点,成为各国开发的主流。电动汽车的发展有赖于技术的进步,尤其是需要进一步提高其驱动系统的性能。电动汽车对其驱动系统的要求是转矩控制能力良好,转矩密度高,运行可靠性及在整个调速范围内的效率尽可能高,从而保证车辆具有良好的动力性能和操控性,同时在车载动力电池未能取得突破的情况下,延长车辆的续驶里程。研究并开发出高水平的电机驱动控制系统,对提高我国电动汽车驱动系统水平及电动汽车的产业化具有重要意义[2]。 随着永磁材料性能的提高和成本的降低,永磁同步电动机以其高效率、高功率因数和高功率密度等优点,正逐渐成为电动汽车驱动系统的主流电机之一。 1电动汽车用电动机及驱动系统比较 电气驱动系统作为现代电动汽车的核心,主要包括:电动机、功率电子元器件及控制部分。评价电动车的电气驱动系统实质上主要就是对不同电动机及其控制方式进行比较和分析。目前正在应用或开发的电动车用电动机主要有直流电动机(DCM)、感应电动机(IM)、永磁电动机(PM)、开关磁阻电动机(SRM)网类。下面分别对几种电气驱动系统进行简要分析和说明,其总体比较见表l。 1.1直流电动机驱动系统 在电动汽车领域最早使用的就是直流电动机。直流电动机结构简单,易于控制,具有良好的电磁转矩控制特性,但是由于采用机械换向结构,维护困难,并产生火花,容易对无线电产
1 引言 全世界的汽车保有量和使用量巨大,而且增长迅速。21世纪,人类将面临严峻的能源和环境挑战,研究开发节能、环保和安全的汽车是实现交通可持续发展的必由之路。其中,电动汽车以其在使用过程超低排放/零排放、能源利用多元化和高效化、便于实现智能化控制等方面的技术优势备受重视,呈现加速发展态势。在电动汽车诸多电力驱动系统型式中,采用轮毂电机系统的动力系统结构型式正日益成为发展方向,而轮毂电机系统作为关键总成成为电动汽车领域的研究重点和研究热点。本文在综合大量文献的基础上,针对轮毂电机系统的研究进展进行了综合分析。论文阐述了轮毂电机系统的概念,回顾了轮毂电机及其在电动汽车上研究和应用历史,对比分析轮毂电机的结构型式、电机应用类型以及性能特点,在剖析轮毂电机驱动系统结构型式对整车性能的积极和消极影响的基础上总结出轮毂电机系统的设计开发的关键技术问题。 2 轮毂电机系统的概念与应用领域 轮毂电机系统是本文提出的概念。通常,人们称其为轮毂电机,也有的研究者称其为轮式电机、车轮电机或者电动轮,英文名称以“in-wheel motor”居多,也有称“wheel motor”和“wheel direct drive motors”的。实际上,以上称谓严格来说都是不准确的。“轮毂电机、轮式电机和车轮电机”都侧重于电机,而“电动轮”侧重于车轮。若从系统观点出发,我们所指确切应为驱动电机和车轮紧密集成而形成的一体化的多功能系统,即为“integrated motor and wheel system”。为了方便起见,本文对已经被工程界广泛应用的“轮毂电机”和“in-wheel motor”稍作修改,以“轮毂电机系统”和“in-wheel motor system”作为中英文称谓。
电动车动力参数匹配计算 表2动力性参数 Tab.2Dynamics Parameters 参数 指标续驶里程/km 100-180最高车速/(1km h -?) 50-700-0.7max v 1km h -?加速时间/s ≤15201km h -?最大爬坡度20%-25% 1整车额定功率计算 电动汽车在行驶过程中,整车额定功率需求一般由在平直路面上最高车速行驶所需功率决定,具体计算公式为: t max max D rated v .v A C mgf P ηρ??? ? ? ?? ?? ???+≥2 632136001(1) 式中:rated P 为整车额定功率,W k ;m 为电动汽车满载质量,kg ;g 为质量加速度, 9.82s /m ;f 为滚动阻力系数;ρ为空气密度,为1.2263m /kg ;D C 为空气阻力系数;max v 为 最高车速,h /km ;t η为传动系统效率,取0.95。 带入相关参数后计算得:rated P ≥(4.1+2.5)W k 。 2整车最大功率计算 整车最大功率需求一般出现在加速或上坡时,故依此选定。2.1加速过程最大功率 在加速过程中最大功率为: t a D max a v .a v A C mgf ma P ηρδ??? ? ? ???? ???++≥2 632136001(2) 式中:max a P 为加速时整车功率需求,W k ;δ为汽车旋转质量换算系数;a 为加速度,2s /m ;a v 为加速目标车速,h /km 。 带入相关参数后计算得: 表1整车参数 Tab.1Vehicle Parameters 参数指标驱动形式集中电机驱动 整备质量/kg xx 满载质量/kg xx 轴距/m xx 质心到前轴距离/m -质心高度/m -主传动比xx 车轮滚动半径/m xx 迎风面积/2m xx 风阻系数xx 滚动阻力系数xx 汽车旋转质量换算系数 xx 附件功率/W k xx
高功率密度盘式轮毂电机集成技术 一、轮毂技术国内外现状 轮毂电机技术又称车轮内装电机技术,它的最大特点就是将动力、传动和制动装置都整合到轮毂内,因此将电动车辆的机械部分大大简化。早在1900年,就已经制造出了前轮装备轮毂电机的电动汽车,在20世纪70年代,这一技术在矿山运输车等领域得到应用。作为比较先进的驱动技术,国外有很多研究所和公司都对轮毂电机进行了专项研究,并已经开始将其应用到实际产品中。位于美国加州的通用汽车高级技术研发中心成功地将自行研制的轮毂电机应用到雪弗兰s210皮卡车中。该电机给车轮增加的重量只有约15kg,却可产生约25kW的功率,产生的扭矩比普通的雪弗兰s210四缸皮卡车高出60%,加速性能也有所提高。 通用开发的为150吨的重型卡车设计的轮毂电机(内燃动力电传动)
典型内转子结构的轮毂电机驱动系统结构示意图 日本对轮毂电机研究起步早,技术在世界上处于领先。日本庆应义塾大学清水浩教授领导的电动汽车研究小组在过去10年中,研制的IZA、ECO、KAZ等电动汽车均采用轮毂电机驱动技术。其中后轮驱动电动汽车ECO采用的永磁无刷直流电机,额定功率618kW,峰值功率可达20kW。 本田研发的轮毂电机实物 日本包含丰田在内的各大公司在2003年东京汽车展上纷纷推出自己的轮毂驱动产品,如:普利司通公司的动力阻尼型车轮内装式电机系统、丰田公司的燃料电池概念车FINE2N等等。法国的TM4公司设计的一体化电动轮,采用外转子永磁无刷直流电动机,额定功率为1815kW,额定转矩为950r/min,额定工况下的平均效率可达96.13%,峰值功率可达80kW,峰值扭矩为670N?m,最高转速为1385r/min。 目前国内也有自主品牌汽车厂商开始研发此项技术,在2011年上海车展展出的瑞麒X1增程电动车就采用了轮毂电机技术。
最新能源纯电动物流车-计算设计书 【最新资料,WORD文档,可编辑修改】
一、设计要求 二、整车技术参数 三、驱动结构设计 四、驱动系统设计 五、供电系统设计 六、空调系统设计 七、真空助力系统设计 八、设计结果 一、设计要求 1、整车性能技术指标 A 运输类新能源专用车、货车动力电池系统总质量占整车整备质量比例不超过25%,作业类新能 源专用车、货车不超过20%。
B 吨百公里电耗不超过10kWh;M1、N1类采用工况法,其他暂采用40km/h等速法,其中作业类 专用车检测时上装部分不工作。 (1)最高车速:90km/h; (2)最大爬坡度:20%; (3)加速性能0-50 Km/h:<15s; (4)60km/h续驶里程≥200km(等速法); (5)工况法续航里程≥180km; 二、整车技术参数 新能源厢式运输车选用长安传统载货汽车底盘(SC1031GDD43)为改装主体。 新能源厢式运输车是在长安底盘改装成纯电动可承载式底盘的基础上,加装载货物厢体而形成的一款新能源厢式运输车,该车配置5MT手动变数箱、永磁同步驱动电机及控制器、整车控制器、三元锂离子锂电池、高压配电和BMS管理系统、智能车载充电器、直流快充充电系统、冷却系统、真空助力制动系统、助力转向系统、车载冷暖空调以及远程监控系统等。驱动电机采用电机前置通过法兰固定于变速箱,变速箱固定于整车中部,控制器及车载充电器布置在车身前中部,动力锂离子电池、高压配电系统及电池管理系统布置在车体中前两侧部位,车载空调布置在车体前部,远程监控终端固定于驾驶室中控台内部,采用5MT手动变数箱/2档AT自动变速箱。 1.整车控制系统的工作原理图 2.相关设计的参数计算 1)整车技术参数及常数值标定
电动汽车动力电池系统国标最详解读 来源:第一电动网发布时间:2015-08-28 09:56 设置字体:大中小 关注度:4791 次 分享到: 摘要:国标针对动力电池系统,建立了常规性能和功能要求——容量、能量、功率、效率、标准循环寿命、工况循环寿命、存储、荷电保持、容量恢复、倍率性能、高低温性能等。 【高工锂电综合报道】国标针对动力电池系统,建立了常规性能和功能要求--容量、能量、功率、效率、标准循环寿命、工况循环寿命、存储、荷电保持、容量恢复、倍率性能、高低温性能等,建立了安全防护要求--操作安全、故障防护、人员触电防护、滥用防护、环境适应性、事故防护、用户手册和特殊说明等,范围覆盖了电芯、模组、动力电池包、动力电池系统这4个层级,产品类型包括混合动力、插电式/增程式混合动力、纯电动乘用车和商用车,已基本上了构成了一个完整的体系。 一、构建标准体系 电动汽车早期的发展过程中,GB或GB/T国家标准的缺失在一定程度上造成了行业的良莠不齐和鱼龙混杂。仅依靠汽车行业的QC/T推荐标准作为一种参考,并不具有权威性和广泛性,整车企业和电池企业要么茫无头绪,要么各行其是、各执一词,缺乏一个统一的衡量标准。 随着2015年新版GB/T国家推荐标准的陆续发布,我国电动汽车产业围绕动力电池系统已基本上构建了完整的标准体系,形成了行业的准入门槛,有利于行业的规范发展和优胜劣汰。 新国标在2015年5月颁布(部分标准将在10月份或年底颁布),与旧标准之间有一年的过渡期,从2016年开始,相关企业都将遵循新的标准进行相关检测。新国标与工信部2015年3月发布的《汽车动力蓄电池行业规范条件》一起,将加速动力电池行业的洗牌,提高行业集中度水平。
纯电动汽车驱动系统设计及仿真毕业设计
纯电动汽车驱动系统设计及仿真 学院 专业 年级班别 学号 学生姓名 指导教师 2015年 6 月
摘要 随着环境污染的加剧和资源的日益短缺,纯电动汽车(EV)凭借能源利用率高、环境污染小的特点得到广泛关注和快速发展,成为当前研制取代内燃机汽车的首选车型,其发展前景广阔。作为纯电动汽车核心部件之一,驱动系统直接决定了纯电动汽车整车性能优劣,目前我国的纯电动汽车存在的主要问题是续航里程少和动力能源电池成本高,基于此种情况,对驱动系统进行合理设计,是提高电动汽车的动力性能和增加续航里程的有效手段,所以文章对纯电动汽车驱动系统进行设计研究。 本文首先分析了纯电动汽车的特点,包括无污染、噪声低、结构简单、能源效率高且多样化等。然后分析了纯电动汽车驱动系统的整体结构和工作原理,并以某普通普及车型为基础,对驱动系统进行设计改善。先确定相应动力参数目标,然后根据整车参数进行理论计算,参考相应手册和市场上的部件,选择合适的驱动系统结构装置,如电机、蓄电池的类型和相关参数。最后利用车辆系统仿真软件ADVISOR(Advanced Vehicle Simulator)对纯电动汽车进行动力性能仿真实验。首先建立了仿真模型,包括选择传动系统类型、设置参数、设计控制策略,然后选择仿真工况进行加速性能和爬坡性能的仿真,最后得到仿真性能结果图表,包括仿真参数图、参数仿真报告、能源消耗图、虚拟回放。基于符合初始设计技术要求的参数,利用ADVISOR里的AUTOSIZE软件模块进行参数优化,然后对得到的优化参数值进行仿真,进一步分析纯电动汽车驱动系统仿真动力性能,确定最优参数。 关键词:纯电动汽车、驱动系统、结构参数、动力学、仿真
纯电动汽车驱动系统的参数设计及匹配 张珍 (长安大学) 摘要:本文系统的介绍了纯电动汽车驱动系统主要部件的选型及根据电动汽车主要性能的要求进行主要参数的设计及匹配,并通过对具体的车型的计算,进一步探讨了主要参数的确定。 关键词:纯电动汽车(EV) 驱动系统参数设计 1、前言 纯电动汽车(EV)即蓄电池电动汽车是“零污染”的绿色环保交通工具,它没有噪声和振动、操作性能好等远远优于内燃机汽车。EV是当前开发和研制取代内燃机汽车的首选车型,其前景广阔。 目前,我国的EV大都建立在改装车的基础上,其设计是一项机电一体化的综合工程。改装后的EV高性能的获得并不是简单地将内燃机汽车的发动机和然油箱换成电动机和蓄电池便可以实现的,它必须对储能装置、动力装置及变速器、减速器等参数进行合理的匹配。鉴于目前国内对EV研究的现状,故本论文的研究建立在传统汽车驱动系统的基础上。 2、电动汽车的驱动系统的基本结构 本文研究的EV的电力驱动结构形式如图1所示 图1 电驱动的形式 C——离合器;D——差速器;GB——变速器;M——电动机
3、主要部件的选型及主要参数的确定 EV 驱动系统的关键部件为:电动机、蓄电池、变速器等,这些部件类型的选择及参数设置直接决定着EV 的动力性和续驶里程等主要性能。 3.1电动机的选型及其参数的设计 3.1.1电动机的选型 电动机的选择要满足EV 对电动机性能的要求:①高电压、高转速、质量轻;②电动机具有较大的起动转矩和较宽的调速性能;③高效率、低能耗、实现制动能量的收回;④安全性必须符合相关部门的标准和规定。另外,电动机还要求可靠性好、寿命长;结构简单,适合大批生产,使用维修方便,价格低等。 3.1.2电动机额定功率的选择 本课题采用某电动汽车的部分技术参数如表1 表1 电动汽车的部分技术参数 电动机额定功率可根据EV 的最高行驶车速、爬坡和加速性能来确定[1]。建立电动机额定功率的数学模型: t D a m V A C V f g m P η÷??? ???????+???≥7614036003max max 1 (1) t a D a a a a m V A C V g m V f g m P ηαα÷??????? ???+???+????≥761403600sin 3600cos 32 (2) t a a D a m V dt du m V A C V f g m P ηδ÷?????????+??+???≥360076140360033 (3) 式中: max V =100km/h ;a m =1600(kg);D C =0.2;a V =30km/h ;ηt =0.9;