
2.2.5 平面四杆机构的设计
连杆机构的设计方法有作图法、解析法及实验法三种;其中作图法是重点。 用作图法设计四杆机构是根据设计要求及各铰链之间相对运动的几何关系,通过作图来确定四个铰链的位置。根据不同的设计要求,作图法设计四杆机构可分为三种类型:
1)按预定的连杆位置设计四杆机构。
①已知连杆 BC 的三个预定位置B 1 C 1、B 2 C 2、B 3 C 3,设计此四杆机构的实质是求固定铰链中心的位置。此类问题可用求圆心法来解决,即作铰链 B 的各位置点连线B 1B 2、B 2B 3的中垂线,两中垂线的交点即固定铰链A 的中心。同样,作铰链C 的各位置点连线C 1C 2、C 2 C 3的中垂线,两中垂线的交点即固定铰链 D 的中心。若仅给定连杆 BC 的两个预定位置则设计的四杆机构有无穷多解。 ②若给定固定铰链中心A 、D 的位置及连杆上标线EF 的三个预定位置,设计此四杆机构的实质是求活动铰链中心B 、C 的位置。此类问题要用反转法求解,即把机构转化为以原连杆第一位置 E 1 F 1为机架,原机架 AD 为相对连杆,再仿上求得活动铰链 A 的三个相应位置A 、A 2’、A 3’,它们所在圆的圆心就是其相对固定铰链(实际活动铰链)B 的位置B 1,可用前述求圆心法求得。 2)按预定的两连架杆对应位置设计四杆机构。
如已知两连架杆的三组对应位置及机架长度l AD 、原动件长度l AB ,设计此四杆机构的实质是求活动铰链C 的位置。此问题可用反转法求解,即把从动杆CD 的第一位置C 1D 看做机架,原动件AB 看做连干,求得活动铰链B 的三个相应位置B 、B 2′、B 3′,他们所在圆的圆心就是其相对固定铰链C 的位置C 1,若仅给定两连架杆的两组对应为止,则设计的四杆机构有无穷多解。 3)按给定的行程速比系数K 设计四杆机构
已知行程速比系数K 及某些其他条件(如曲柄摇杆机构CD 的长度l CD 、摇杆摆角φ),设计此四杆机构的实质问题是确定曲柄的固定铰链中心A 的位置,进而定出其余三杆长度。设计方法是首先根据行程速比系数K 求出极位夹角θ,根据几何条件作出从动件的极限位置(摇杆的极限位置C 1D 、C 2D ),作角∠C 2 C 1P=90°-θ, 角∠C 1C 2 P=90°,再做直角三角形ΔC 1C 2P 的外接圆,A 点即在此圆上,可由其他附加条件确定此四杆机构。
2.3 典型题解
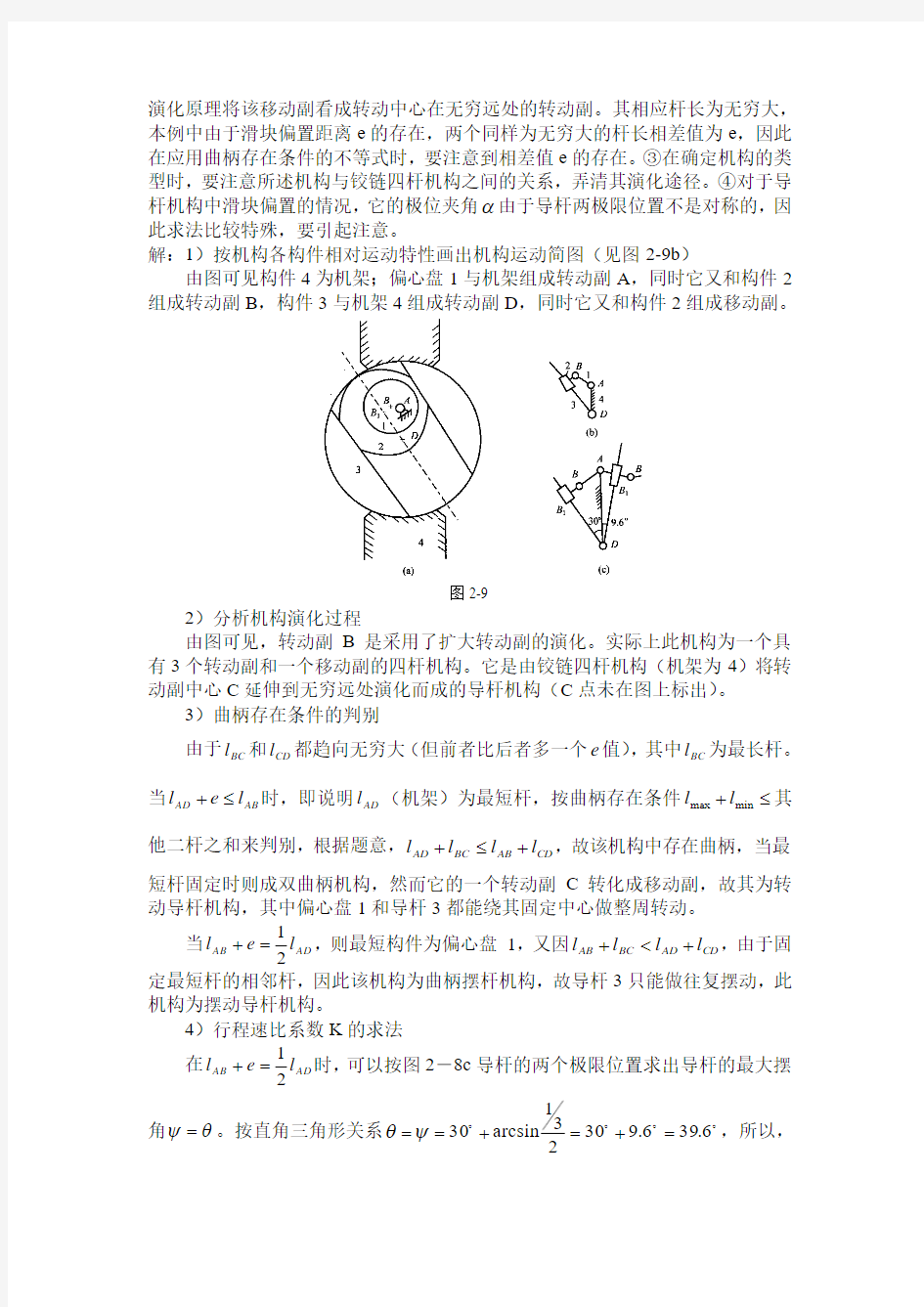
1、在图2-9a 所示机构中,当偏心盘1绕固定中心A 转动时,滑块2在圆柱体3
的直槽内滑动,因而使3绕固定中心D 转动,由于滑块2偏于偏心盘1的圆
心B ,且e l l AB BB ==2
1
1。如AB AD l e l =+,试问这是什么机构?又如
AD AB l e l 2
1
=+,它将是什么机构?后者的行程速比系数K 为多少?
解题思路与技巧①分析机构类型首先应撇开其构件外型和构造,弄清各构件的相对运动情况和构件间组成什么运动副,然后再画出机构运动简图。②运用曲柄存在条件判别机构有无曲柄存在,如遇到四杆机构中具有移动副,则可按机构
演化原理将该移动副看成转动中心在无穷远处的转动副。其相应杆长为无穷大,本例中由于滑块偏置距离e 的存在,两个同样为无穷大的杆长相差值为e ,因此在应用曲柄存在条件的不等式时,要注意到相差值e 的存在。③在确定机构的类型时,要注意所述机构与铰链四杆机构之间的关系,弄清其演化途径。④对于导杆机构中滑块偏置的情况,它的极位夹角α由于导杆两极限位置不是对称的,因此求法比较特殊,要引起注意。
解:1)按机构各构件相对运动特性画出机构运动简图(见图2-9b )
由图可见构件4为机架;偏心盘1与机架组成转动副A ,同时它又和构件2组成转动副B ,构件3与机架4组成转动副D ,同时它又和构件2组成移动副。
图2-9
2)分析机构演化过程
由图可见,转动副B 是采用了扩大转动副的演化。实际上此机构为一个具有3个转动副和一个移动副的四杆机构。它是由铰链四杆机构(机架为4)将转动副中心C 延伸到无穷远处演化而成的导杆机构(C 点未在图上标出)。
3)曲柄存在条件的判别
由于BC l 和CD l 都趋向无穷大(但前者比后者多一个e 值),其中BC l 为最长杆。当AB AD l e l ≤+时,即说明AD l (机架)为最短杆,按曲柄存在条件≤+min max l l 其他二杆之和来判别,根据题意,CD AB BC AD l l l l +≤+,故该机构中存在曲柄,当最短杆固定时则成双曲柄机构,然而它的一个转动副C 转化成移动副,故其为转动导杆机构,其中偏心盘1和导杆3都能绕其固定中心做整周转动。
当AD AB l e l 2
1
=+,则最短构件为偏心盘 1,又因CD AD BC AB l l l l +<+,由于固
定最短杆的相邻杆,因此该机构为曲柄摆杆机构,故导杆3只能做往复摆动,此机构为摆动导杆机构。
4)行程速比系数K 的求法
在AD AB l e l 2
1
=+时,可以按图2-8c 导杆的两个极限位置求出导杆的最大摆
角θψ=。按直角三角形关系 6.396.9302
31
arcsin 30=+=+==ψθ,所以,
行程速比系数564.1180180=-+=θ
θ
K 。 2、如图2-10,若已知铰链四杆机构中,mm a 50=,mm b 120=、mm c 90=,试
讨论:若机架d 为变值,则d 值在哪些范围内可取得双曲柄机构。在哪些范围内可得曲柄摇杆机构,又在哪些范围内可得双摇杆机构?
图2-10
解:本题讨论限于d 为机架。
l )对于双曲柄机构,d 应为最短杆,a d <且应满足
c a b
d +≤+
解出 mm b c a d 201209050=-+=-+≤ 即 mm d 200≤<
2)对于曲柄摇杆机构,分两种情况:
①a 为最短杆,b 为最长杆,b d a ≤<且应 c d b a +≤+
则 )(809012050mm c b a d =-+=-+≥ 最后得 mm d mm 12080≤≤
②a 为最短杆,d 为最长杆,b d >且应 b c d a +≤+
则 )(
1605090120mm a c b d =-+=-+≤ 最后得 mm d mm 160120≤≤
3)对于双摇杆机构
①d 为最短杆, a d ≤且应
c a
d b +>+
则 )(201209050mm b c a d =-+=-+>
最后得 mm d mm 5020≤<
②a 为最短杆,b 为最长杆,b d a <≤且应(d 为中间长度杆) d c b a +>+
则 )(809050120mm c a b d =-+=-+< 最后得 mm d mm 8050≤≤ ③a 为最短杆,d 为最长杆
c b a
d +>+
则 )(
1605090120mm a c b d =-+=-+>
由三角形长度关系 )(
2605090120mm c b a d =++=++≤ 最后得 mm d mm 260160≤<
3、如图2-11曲柄滑块机构中,已知偏距e 、曲柄长度R 、连杆长度L ,曲柄以
等角速度回转,试求: 1)滑块的行程S ; 2)行程速比系数K ; 3)传动角max γ、min γ。
图2-11
解:1) 222221)()(e R L e R L DC DC S ----+=-= 由三角形边长关系 R L S R L +>+- 则 R S 2>
2)R
L e
R L e DAC DAC --+=∠-∠=arccos arccos 21θ 则 θ
θ
-+=
180180K 3)L
R
R e 2arcsin 9090min +--=-=
αγ
L
R e --=-=a r c s i n
90'90max αγ
4、试设计一曲柄摇杆机构。设摇杆两极限位置分别为
40;90,15021===CD l ?? mm
,l AD =50 mm 。求 l AB 、l BC 及行程速比系数K 和最小传动角γmin
e
R
L
A
图2-12
。(用图解法求解,本小题10分)
解:(1)取比例尺μl =1 mm
mm
先将已知条件画出。 (2分)
(2)测得:AC l l BC AB 126=-= mm AC l l BC AB 264=+= mm
两式联立求得:l AB =19 mm , l BC =45 mm (3分) (3)测得:θ=∠C AC 1215=
所以 K =+-=+-=1801801801518015
118
θθ. (3分) (4) 测得 γmin =42 (2 分) 5、在偏置曲柄滑块机构中,已知滑块行程为80 mm ,当滑块处于两个极限位置时,机构压力角各为30 和60 ,试用图解法或解析法求: (1)杆长l AB 、l BC 及偏距 e ;(4分) (2)该机构的行程速度变化系数K ;(2分) (3)该机构的最大压力角αmax ;(2分) 解:(1〕在?AC C 12中
∠=∠=C AC AC C 121230
为等腰三角形,所以AC C C 212=
AC C C 1122302803013856==??=cos cos . mm ???
=-=+8056.138AB BC BC AB
联立解得 BC AB ==109282928.. mm
mm
e AC =?=?=26080606928sin sin . mm (5分)
(2)极位夹角θ=∠=C AC 1230
图2-13
K =
+-=+-=180********
18030
14θθ. (5分)
(3) 4.6428
.10928
.2928.69arcsin arcsin
max =+=+=BC AB l l e α 6、试设计一摇杆滑块机构。已知从动滑块的行程H C C =21,连杆二个位置11P C 、
22P C 及摇杆的固定铰链点A 的位置(见图2-14)
,求摇杆长度AB l 和连杆长度BC l 。
(a)
(b)
图2-14
解:方法1:刚化反转法(图2-14a )
1)在连杆标线上任取一点P ,使2211P C P C =;
2)以连杆第一位置11P C 为基准,将22P AC ?移动位置使22P C 与11P C 重合。即分别以1C 、1P 为圆心,以A C 2和A P 2为半径作圆弧交于'A 点,'A 点即为以连杆第一位置11P C 为基准得到的A 点的转位点。
3)作A A '的中垂线N N ',其上任意一点均可作为A A '的圆心,即铰链B 的位置点。但为确保压力角α,取N N '与11P C 的交点1B 作为主动件1AB 与连杆11C B 的铰链点。由此求得摇杆长度AB l 和连杆长度BC l 。
方法2:半角转动法(图2-14b )
1)作21C C 的垂直平分线nn ,使α=∠=∠n P C n P C 122121,则12P 点即为连杆
BC 的转动极;
2)利用等视角原理,令α=∠=∠212112B AP B AP ,即求得铰链点B ; 3)则l AB AB l μ=,l BC BC l μ=。
*7、给定行程速比系数5.1=K ,摇杆的长度mm l DC 50=及摇杆摆角 40=ψ,连杆BC 的长度mm l BC 50=,试用图解法设计该机构。
图2-15
解: 结果参考图2-15,具体步骤如下:
1)根据K 求θ
361
5.11
5.118011180=+-?=+-=K K θ 2)任选转动副中心D 的位置,以D 为圆心、DC l 为半径作圆弧,使
4021==∠ψDC C ,找出连杆的两个极限位置D C 1、D C 2;
3)连接21C C ,作θ-=∠=∠ 901221O C C O C C ,得点O ;
4)以O 为圆心,1OC l 为半径作圆L (在无附加条件时,L 圆的21EC C 上任意一点均可作为铰链点A );
5)作 72290''1221=-=∠=∠θO C C O C C ,得'O 点。以'O 点为圆心、1
'C O 为半径作圆M (M 圆上21'C F C 上任意一点的圆周角为2θ);
6)以2C 为圆心、BC l 2为半径作圆N ,与M 圆相交于F 点;
7)连接2C 、F ,F C 2与圆L 交于A 点,A 点即为具有给定连杆长度的铰
链四杆机构ABCD 的固定铰链中心。
(a) (b)
图 2-16
扩展:1)若已知机架长度AD l ,则只需过D 点以AD l 为半径作圆弧,交圆L 与A
点,即可求得此铰链四杆机构(见图2-16a );
图
2) 若已知曲柄AB l 的长度,可作与OD 距离为AB l 的直线tt ,与R C 1的连线交于F 点,然后以R 为圆心,以RF l 为半径作圆,与圆L 交于A 点,即可求得此铰链四杆机构(见图2-16b )。只需证明紫色和绿色三角形全等即可(右图)。 8、图示四杆机构,已知图示机构的尺寸及原动件1的角速度1 。 求: (1)图示机构共有多少个瞬心?其中几个是绝对瞬心?(4分) (2)标出所有瞬心的位置;(6分)
(3)用瞬心法求M 点的速度M v (3分)。要求:(本小题13分) 解: (1)瞬心数目
AB l R
'
C t
t
F
62
)
14(42)1(=-=-=K K N
其中有3个绝对瞬心。
(2)瞬心位置如图所示 :
(3)24
1214
1212P P P P ?=ωω 方向: 2ω与1ω同向,顺时针方向。
p M v v =
9、设计图示六杆机构。已知AB 为曲柄,且为原动件,摇杆DC 的行程速比系数
1=K ,滑块行程mm F F 30021=,
mm e 100=,mm x 400=,摇杆两极限位置为DE 1和DE 2,φ1=45o, φ2=90o,l EC =l CD ,且A 、D 在平行于滑道的一条水平线上,试求出各杆尺寸(图2-18)。
分析:
1)该六杆机构可以分解为两个基本四杆机构ABCD 及DEF ,前者为曲柄摇
杆机构,后者是摇杆滑块机构。
2)对摇杆滑块机构,已知摇杆及滑块(相当于两连架杆)的二组相对位置,可通过反转法来设计杆长。
3)对曲柄摇杆机构,因为k=1,所以θ=0,曲柄与连杆两次共线都在同一条直线上,由此可以确定铰链A 的位置。
4)题图只是示意图,不是运动简图,不能在上面直接量取尺寸,必须严格
按比例画出六杆机构运动简图。
解:取mm m l 001.0=μ作图
1)作两条平行线,间隔为mm e 100=,在下面的线上任取一点D ,作垂线DII ,作DI 线,使∠IDII=45°;在上面一条平行线上取F 1、F 2点,使
mm F F 30021=,且F 1至DII 的距离mm x 400=。
图2-18
2)连接DF 2,绕D 点逆时针转 45,得F 21,连F 1、F 21点,作F 1 F 21的中垂线交DI 于E 1点,连E 1F 1。
3)以D 为圆心、DE 1为半径作弧交DII 于E 2点,作DE 1、DE 2的中点连线C 1C 2,交D 点所在平行线于A 点,以A 为圆心、221C C 为半径作圆交21C C 于B 1、B 2点。连接AB 1、B 1C 1、DE 1、E 1F 1即为所求机构。 从图中量取各杆长度即可。 小结:
1)对于组合机构,首先判断出由哪些基本机构组成,然后根据已知条件进行求解。
2)对曲柄滑块机构,是用“反转法”还是“反移法”,要根据题目已知条件,如果知道了滑块上铰链位置,用“反转”;如果知道曲柄上铰链位置,用“反移”( 图2-19)。
图2-19
第七章空间连杆机构运动分析 第七章空间连杆机构运动分析 (1) 7.1空间机构运动分析矩阵法:刚体空间位移矩阵 (2) 7.1.1 绕直角坐标轴的旋转 (2) 7.1.2 空间旋转矩阵 (3) 7.1.2.1 按右手规则绕三维直角坐标轴的一系列旋转表示空间旋转 (3) 7.1.2.2 绕空间任意轴u旋转φ角表示空间旋转 (3) 7.1.2.3 用欧拉角ψ,θ和φ来描述空间旋转 (4) 7.1.3 刚体位移矩阵及其逆 (4) 7.1.4 旋转矩阵与位移矩阵的微分 (5) 7.1.4.1 旋转矩阵的微分 (5) 7.1.4.2 位移矩阵的微分 (6) 7.2空间四杆机构运动分析 (7) 7.2.1 空间四杆机构RSSR运动分析 (7) 7.2.2 习题 (8) 7.3空间串联机器人运动分析 (8) 7.3.1 3-RPR运动分析 (8) 7.3.2 RRRRRR机械手运动分析 (11) 7.4空间并联机器人运动分析 (12) 7.4.1 6-SPS并联机构的位置分析 (12) 7.5参考文献 (13)
7.1 空间机构运动分析矩阵法:刚体空间位移矩阵 在三维空间中,刚体的总位移可以视为刚体的角位移和刚体上任何适当参考点的线位移这两个基本位移分量的总和。描述刚体位移有好几种方法,其中较常用的是绕三角坐标轴的一组旋转矩阵、绕空间任意一轴的旋转矩阵和欧拉角旋转矩阵。下面分别讨论这三种旋转矩阵。 7.1.1 绕直角坐标轴的旋转 图表示固连在旋转刚体上的一个定长向量绕z 轴的旋转向量v 在位移前后的所有分量都是以相对固定的x-y 轴参考系来度量。当向量1v 绕z 轴旋转α角,到达2v 处时,有下列方程(参见邹老师的教材P62) 21121121cos sin sin cos x x y y x y z z v v v v v v v v αα αα=-=+= (7.1) 把上式写成矩阵的形式,有 212121cos sin 0sin cos 00 1x x y y z z v v v v v v α α αα-????????????=?????????????????? (7.2) 上式可缩写成如下的形式,即 2,1()[]()z v R v α= (7.3) 式中,[]z R α为绕z 轴转α角的旋转矩阵,有 ,cos sin 0[]sin cos 00 1z R ααααα-?? ??=?? ???? (7.4) 同理,可写出分别绕y 轴和x 轴旋转的矩阵 ,cos 0sin []010sin 0cos y R βββββ?? ??=?? ??-?? (7.5) ,1 00[]0cos sin 0sin cos z R γγ γγ γ?? ??=-?????? (7.6)
游梁式抽油机是以游梁支点和曲柄轴中心的连线做固定杆,以曲柄,连杆和游梁后臂为三个活动杆所构成的四连结构。 1.1四连杆机构运动分析: 图1 复数矢量法: 为了对机构进行运动分析,先建立坐标系,并将各构件表示为杆矢量。结构封闭矢量方程式的复数矢量形式: 3121234i i i l e l e l e l ???+=+ (1) 应用欧拉公式cos sin i e i θθθ=+将(1)的实部、虚部分离,得 1122433112233cos cos cos sin sin sin l l l l l l l ??????+=+? ?+=? (2) 由此方程组可求得两个未知方位角23,??。 当要求解3?时,应将2?消去可得 2222234134313311412cos 2cos()2cos l l l l l l l l l l ????=++---- (3) 解得 3tan(/2)(/()B A C ?=- (4) 33 233 sin arctan cos B l A l ???+=+ (5) 其中:411 11 2222 32 3 cos sin 2A l l B l A B l l C l ??=-=-++-= (4)式中负号对应的四连杆机构的图形如图2所示,在求得3?之后,可利用(5)求得2?。
图2 由于初始状态1?有个初始角度,定义为01?,因此,我们可以得到关于011t ??ω=+, ω是曲柄的角速度。而通过图形3分析,我们得到OA 的角度0312 π θ??=- -。 因此悬点E 的位移公式为||s OA θ=?,速度||ds d v OA dt dt θ = =,加速度2222||dv d s d a OA dt dt dt θ===。 图3 已知附录4给出四连杆各段尺寸,前臂AO=4315mm ,后臂BO=2495mm , 连杆BD=3675mm ,曲柄半径O ’D=R=950mm ,根据已知条件我们推出''||||||||OO O D OB BD +>+违背了抽油系统的四连结构基本原则。为了合理解释光杆悬点的运动规律,我们对四连结构进行简化,可采用简谐运动、曲柄滑块结构进行研究。 1.2 简化为简谐运动时的悬点运动规律 一般我们认为曲柄半径|O ’D|比连杆长度|BD|和游梁后臂|OA|小很多,以至于它与|BD|、|OA|的比值可以忽略。此时,游梁和连杆的连接点B 的运动可以看为简谐运动,即认为B 点的运动规律和D 点做圆周运动时在垂直中心线上的投影的运动规律相同。则B 点经过时间t 时的位移B s 为
空间四连杆机构的等视角原理及应用 莫灿林陈延生 摘要 (本文通过对空间四连杆机构的等视角原理、相对运动转换及相对转动极线确定方法和研究,找到按给定连架杆两组、三组、四组对应位置的空间四连杆机构的几何设计方法。) 1、空间四连杆机构的等视角原理: 图1所示,AB杆在V 面上绕过点A且垂直于V 面的轴线Y A转动,DC杆 在H面上绕过点D且垂 直于H面的轴线Z D转动, AB1C1D、AB2C2D为空间 四连杆机构ABCD运动 的两个位置。 分别作线段B1B2、C1C2的中垂面M、N,它们的交线为L12。根据空间两等长线段可绕一轴线旋转使它们重合的性质知,连杆BC的两位置B1C1、B2C2可绕直线L12作纯转动实现。在此,可称直线L12为转动极线或极线。 现把图1换成图2的形式,极线L12垂直于平面P1B1B2、P2C1C2,连杆BC绕极线转过角φ12,则点B1、C1同时在极线L12的垂直面上绕L12转过角φ12,到达B2、C2,所以∠B1P1B2=∠C1P2C2=φ12。
⌒B1B2的交点,点C11为中垂面N与 平面P2C1C2上⌒C1C2的交点。由于 中垂面M、N分别过Y A、Z D轴,所 以∠B1P1B11=∠B11P1B2=φ12/2, ∠C1P2C11=∠C11P2C2=φ12/2。因为 ∠B1P1B11=∠C1P2C11=φ12/2,所以 B1C1=B11C11,B1C1绕极线L12旋转 φ12/2可与B11C11重合。设点B11、 C11、B1、C1与极线L12构成的平面分 别为M1、N1、M2、N2,则二面角 M1-L12-N1与二面角M2-L12-N2相等。 因点B11、C11分别在M、N上,故 M1与M重合,N1与N重合。因M、N分别过轴Y A、Z D,故点A、 D分别在M、N上。由此可得到以下的结论:由极线和连杆销轴中心 所构成平面的夹角,与由极线和固定杆销轴中心所构成平面的夹角相 等,由极线分别与两连架杆的销轴中心所构成的两个二面角相等。 如果把平面M1、N1、M2、N2理解为视线,则可认为由极线L12 去看不相邻的两个连架杆AB1和DC1(或AB2和DC2)时,视角均同 向且等于连杆体转角的一半,即φ12/2,这一等角关系称为等视角关 系,或者等半角关系。
一、填空题: 1.平面连杆机构是由一些刚性构件用低副连接组成的。 2.由四个构件通过低副联接而成的机构成为四杆机构。 3.在铰链四杆机构中,运动副全部是转动副。 4.在铰链四杆机构中,能作整周连续回转的连架杆称为曲柄。 5.在铰链四杆机构中,只能摆动的连架杆称为摇杆。 6.在铰链四杆机构中,与连架杆相连的构件称为连杆。 7.某些平面连杆机构具有急回特性。从动件的急回性质一般用行程速度变化系数表示。 8.对心曲柄滑快机构无急回特性。9.偏置曲柄滑快机构有急回特性。 10.对于原动件作匀速定轴转动,从动件相对机架作往复运动的连杆机构,是否有急回特性,取决于机构的极位夹角是否大于零。 11.机构处于死点时,其传动角等于0。12.机构的压力角越小对传动越有利。 13.曲柄滑快机构,当取滑块为原动件时,可能有死点。 14.机构处在死点时,其压力角等于90o。 15.平面连杆机构,至少需要4个构件。 二、判断题: 1.平面连杆机构中,至少有一个连杆。(√) 2.平面连杆机构中,最少需要三个构件。(×) 3.平面连杆机构可利用急回特性,缩短非生产时间,提高生产率。(√) 4.平面连杆机构中,极位夹角θ越大,K值越大,急回运动的性质也越显著。(√) 5.有死点的机构不能产生运动。(×) 6.机构的压力角越大,传力越费劲,传动效率越低。(√) 7.曲柄摇杆机构中,曲柄为最短杆。(√) 8.双曲柄机构中,曲柄一定是最短杆。(×) 9.平面连杆机构中,可利用飞轮的惯性,使机构通过死点位置。(√) 10.平面连杆机构中,压力角的余角称为传动角。(√) 11.机构运转时,压力角是变化的。(√) 三、选择题: 1.铰链四杆机构存在曲柄的必要条件是最短杆与最长杆长度之和 A 其他两杆之和。 A <=; B >=; C > 。 2.铰链四杆机构存在曲柄的必要条件是最短杆与最长杆长度之和小于或等于其他两杆之和,而充分条件是取 A 为机架。 A 最短杆或最短杆相邻边; B 最长杆; C 最短杆的对边。3.铰链四杆机构中,若最短杆与最长杆长度之和小于其余两杆长度之和,当以 B 为机架时,有两
第三章 平面连杆机构及其设计 1、如图示的铰链四杆机构中,AD 为机架,AB a ==35 mm ,CD c ==50 mm ,30==d AD mm ,问BC b =在什么范围内该机构为双摇杆机构;该机构是否有可能成为双曲柄机构? 2、试画出图示机构的传动角γ和压力角α,并判断哪些机构在图示位置正处于“死点”? (1) (2) (3) (4) 5、在图示铰链四杆机构中,已知各构件的长度25=AB l mm ,55=BC l mm ,40=CD l mm , 50=AD l mm 。 (1)问该机构是否有曲柄,如有,指明哪个构件是曲柄; (2)该机构是否有摇杆,如有,用作图法求出摇杆的摆角范围; (3)以AB 杆为主动件时,该机构有无急回性?用作图法求出其极位夹角θ,并计算行程速度变化系数K ; (4)以AB 杆为主动件,确定机构的αmax 和γmin 。 6、图示为开关的分合闸机构。已知150=AB l mm ,200=BC l mm ,200=CD l mm , 400=AD l mm 。试回答:
(1)该机构属于何种类型的机构; (2)AB 为主动件时,标出机构在虚线位置时的压力角α 和传动角γ; (3)分析机构在实线位置(合闸)时,在触头接合力Q 作用下机构会不会打开,为什么? 7、试设计一曲柄摇杆机构。设摇杆两极限位置分别为4090,15021===CD l ; ??mm ,50=AD l mm 。求AB l 、BC l 及行程速比系数K 和最小传动角γmin 。 (用图解法求解用图解法求解,简述作图步骤,并保留作图过程) 8、现需设计一铰链四杆机构,已知摇杆CD 的长度l CD =150mm ,摇杆的两极限位置与机架AD 所成的角度 903021==??,,机 构的行程速比系数K =1,试确定曲柄AB 和连杆BC 的长度。 10、设计一偏置曲柄滑块机构,已知滑块的行程速度变化系数K =1.5,滑块的行程10021=C C l mm ,导路的偏距20=e mm 。 (1)用作图法确定曲柄长度l AB 和连杆长度l BC ; (2)若滑块从点C 1至C 2为工作行程方向,试确定曲柄的合理转向; (3)用作图法确定滑块工作行程和空回行程时的最大压力角。
第8章 四杆机构设计补充题 1 图示四杆机构中,已知:L BC =50mm, L DC =35mm, L AD =30mm, 试问:(1).若此机构为曲柄摇杆机构,且AB杆为曲柄, L AB最大值 为多少? (2).若此机构为双曲柄机构, L AB最大值为多少?其取值范围?(3).若此机构为双摇杆机构, L AB最大值为多少?其取值范围?(4).若 L AB=15mm该机构的行程速比系数K=?θ=? 最小传动角γ min=?(用作图法在图上量取) 2 试根据铰链四杆机构的演化原理,由曲柄存在条件推导图示偏置导杆机构成为转动导杆机 构的条件。 3在图示的导杆机构中,已知L AB =40mm ,试问: (1)若机构成为摆动导杆机构时,的L AC 的最小值为多少? (2)AB 为原动件时,机构的传动角γ为多大? (3)若L AC =50mm ,L AB 的最小值为多少? (4)该机构的极位夹角θ。(在b 图上画) A C D c 题1图 题2图 (a )图
3 试设计一脚踏轧棉机的曲柄四杆机构 ,如要求踏板CD 能离开水平位置上下各摆 10°,且mm l CD 500=,mm l AD 1000=,试求::BC AB l l ,。 4 设计一铰链四杆机构,已知其摇杆的长度L CD =75mm , 行程速比系数K=1. 5 , 机架 L AD =100mm ,摇杆的一个极限位置与机架间的夹角φ=45 °。求曲柄 L AB 的长度和连杆L BC 的长度。 5设计一铰链四杆机构,已知其摇杆的长度L CD =150mm , 行程速 比系数K=1 , 摇杆的一个极限位置与机架的间的角度Φ'=30 ° Φ " = 90 ° ,求曲柄的长度 L AB 和连杆的长度L BC 6设计一曲并滑块机构。已知滑块的行程速比系K=1.5,滑块的冲程 L C1C2 =50mm ,导路的偏距e=20mm ,求曲柄 L AB 的长度和连杆L BC 的长度。 ] 7 如图所示,设已知碎矿机的行程速比系数K=1.25 ,颚板长度L CD =300mm ] 颚板摆角 φ=35°,曲柄长度 L CD 的长度,并验算最小传动 C 1 C 2 题3图 题4图 题6示意图 B C φ" 题5图 A B C D B 2 C 2 B 1 C 1 Ⅰ Ⅱ
空间连杆机构 空间连杆机构由若干刚性构件通过低副(转动副﹑移动副)联接﹐而各构件上各点的运动平面相互不平行的机构﹐又称空间低副机构 中文名空间连杆机构 外文名spatial linkage 又名空间低副机构 低副转动副、移动副 组成单自由度空间闭链机构 应用领域农业机械、轻工机械、纺织机械 1简介 spatial linkage 由若干刚性构件通过低副(转动副、移动副)联接,而各构件上各点的运动平面相互不平行的机构,又称空间低副机构。在空间连杆机构中,与机架相连的构件常相对固定的轴线转动、移动,或作又转又移的运动,也可绕某定点作复杂转动;其余不与机架相连的连杆则一般作复杂的空间运动。利用空间连杆机构可将一轴的转动转变为任意轴的转动或任意方向的移动,也可将某方向的移动转变为任意轴的转动,还可实现刚体的某种空间移位或使连杆上某点轨迹近似于某空间曲线。与平面连杆机构相比,空间连杆机构常有结构紧凑、运动多样、工作灵活可靠等特点,但设计困难,制造较复杂。空间连杆机构常应用于农业机械、轻工机械、纺织机械、交通运输机械、机床、工业机器人、假肢和飞机起落架中。 组成 空间连杆机构常指单自由度空间闭链机构,但是随着工业机器人和假肢技术的发展,多自由度空间开链机构也有不少用途。单自由度单环平面连杆机构只含4个转动副,而单自由
度单环空间连杆机构所含转动副应为7个,此即空间七杆机构。空间连杆机构中采用多自由度的运动副如球面副或圆柱副时,所含构件数即可减少而形成简单稳定的空间四杆机构或三杆机构。为了表明空间连杆机构的组成类型,常用R、P、C、S、H分别表示转动副、移动副、圆柱副、球面副、螺旋副。一般空间连杆机构从与机架相连的运动副开始,依次用其中的一些符号来表示。常用空间四杆机构的组成类型有RSSR、RRSS、RSSP和RSCS机构这些机构因含有两个球面副,结构比较简单,但绕两球心连线自由转动的局部自由度影响高速性能。所有转动副轴线汇交一点的球面四杆机构,也是一种应用较广的空间连杆机构,如万向联轴节机构。此外,还有某些特殊空间连杆机构,如贝内特机构,其运动副轴线夹角和构件尺度要求满足某些特殊关系。 3运动分析和综合 空间连杆机构的分析综合均较平面连杆机构复杂困难,这在很大程度上影响空间连杆机构的推广应用。研究空间连杆机构的方法有以画法几何为基础的图解法和运用向量、对偶数、矩阵和张量等数学工具的解析法。图解法有一定的局限性,应用较多的是便于电子计算机运算的解析法。空间连杆机构分析中重要而又困难的问题是位移分析。对多于4杆的空间连杆机构,由输入求输出位移时因中间运动变量不易避开或消去,一般要用数值迭代法联解多个非线性方程式或求解高次代数方程式。对最难进行位移分析的空间7R机构,由输入求输出位移的代数方程式高达32次。 4基本问题 对空间连杆机构进行运动综合的基本问题是:①当主动件运动规律一定时,要求连架从动件能按若干对应位置或近似按某函数关系运动;②要求连杆能按若干空间位置姿态运动而实现空间刚体的导引;③要求连杆上某点能近似沿给定空间曲线运动。由于这些问题和平面连杆机构的综合问题相仿,所以平面的巴默斯特尔理论可解析地推广于空间刚体的导引问题和其他运动综合问题。此外尚有利用机构封闭性等同条件建立设计方程式和采用优化技术等综合方法。
第三章平面连杆机构及其设计 1、如图示的铰链四杆机构中,AD为机架,AB a ==50 mm, ==35 mm,CD c =在什么范围内该机构为双摇杆机构;该机构是否有30 = AD mm,问BC b =d 可能成为双曲柄机构? 2、试画出图示机构的传动角γ和压力角α,并判断哪些机构在图示位置正处于“死点”? (1)(2)
(3) (4) 5、在图示铰链四杆机构中,已知各构件的长度25=AB l mm ,55=BC l mm , 40=CD l mm , 50=AD l mm 。 (1)问该机构是否有曲柄,如有,指明哪个构件是曲柄; (2)该机构是否有摇杆,如有,用作图法求出摇杆的摆角范围; (3)以AB 杆为主动件时,该机构有无急回性?用作图法求出其极位夹角θ,并计算行程速度变化系数K ; (4)以AB 杆为主动件,确定机构的αmax 和γmin 。 6、图示为开关的分合闸机构。已知150=AB l mm ,200=BC l mm ,200=CD l mm , 400=AD l mm 。试回答: (1)该机构属于何种类型的机构; (2)AB 为主动件时,标出机构在虚线位置时的压力角α 和传动角γ; (3)分析机构在实线位置(合闸)时,在触头接合力Q 作用下机构会不会打开,为什么?
7、试设计一曲柄摇杆机构。设摇杆两极限位置分别为 4090,15021===CD l ; ??mm ,50=AD l mm 。求AB l 、BC l 及行程速比系数K 和最小传动角γmin 。 (用图解法求解用图解法求解,简述作图步骤,并保留作图过程) 8、现需设计一铰链四杆机构,已知摇杆CD 的长度l CD =150mm ,摇杆的两极限位置与机架AD 所成的角度 903021==??,,机 构的行程速比系数K =1,试确定曲柄AB 和连杆BC 的长度。 10、设计一偏置曲柄滑块机构,已知滑块的行程速度变化系数K =,滑块的行程 10021=C C l mm ,导路的偏距20=e mm 。 (1)用作图法确定曲柄长度l AB 和连杆长度l BC ; (2)若滑块从点C 1至C 2为工作行程方向,试确定曲柄的合理转向; (3)用作图法确定滑块工作行程和空回行程时的最大压力角。
教学设计 《铰链四杆机构的类型及判定》教学设计 一、教学设计思路 本着以学生能力培养为本位,尊重学生的认知规律和职业成长规律,结合所教学生的实际情况(中职学生好动),在本次课堂教学中以铰链四杆机构的真实工作情境导入教学内容,提出本次课的工作任务,并以教学载体为主线组织教学,完成工作任务。学生课前做模型,老师评,课后按所学新知改进模型,体现“做中学,学中做”的教学思路。通过解析教学载体,使学生掌握知识点,培养学生的动手能力、协作能力。 二、教材分析: 本课内容选自中等职业教育国家规划教材《机械基础》第六章第二节。本教材前面五章的内容都是机械零件的静止运动,常用机构的教学内容需构建运动的思维,是一个由静向动的变化过程,学生应动起来(思维动起来、手动起来)。在教学中,课程第一章中机构的知识得到了运用与提升,同时本学习单元内容也为后续常用机构的学习垫定了基础。 三、教学目标 、知识目标:1(1)、熟悉高、低副接触的运动特点和四杆机构的组成条件。(2)、掌握铰链四杆机构类型及其判定条件,了解其应用。 2、能力目标: (1)、课前预习并分小组制作铰链四杆机构模型,课后运用所学知识分析存在的问题,改进模型。 (2)、能够判断四杆机构是否存在曲柄,并能够根据已知条件确定四杆机构的形式。 3、情感目标: (1)、培养学生细心观察、分析问题及灵活运用所学知识解决问题的能力。 (2)、通过小组做模型,使学生养成学以致用,大胆实践的精神,同时增强同学间的团队协作意识。 四、教学重难点 教学重点:铰链四杆机构曲柄存在条件的判别及四杆机构类型的确定。 教学难点:铰链四杆机构类型判定条件的应用。 教学关键:杆件的长度、位置与铰链四杆机构类型的关系 突破:做模型、动画、课件 五、教学准备 1、学生准备 (1)、知识储备:掌握运动副、构件、铰链四杆机构的组成等知识;具备初步分析机构运动特点能力。 (2)、预习新课,并在课前试做铰链四杆机构。 2、教师准备 (1)、准备制作铰链四杆机构的材料、课件、动画、教案、教学载体。
空间连杆机构在机械系统中的应用 摘要:空间连杆机构在实现构件的空间运动方面, 与其他机械机构相比, 具有构件数少、结构简单等优点, 而且可实现平面机构不可能实现的某些运动,所以,空间连杆机构在轻工( 缝纫、针织、制鞋、制革等) 机械中有着广泛的应用, 在农业机械、交通工具、化工机械、仪器仪表以及各种控制装置中也有其应用的实例, 尤其在机器人、机械手机构中, 空间连杆机构几乎占着主导地位。 关键词:空间连杆机构;连杆机构实例; 正文: 平面多连杆机构作为传动机构,其优势是能够实现设计者所期望的多种运动规律和运动轨迹的要求,而且结构简单,容易制造,工作可靠。但欲使某简单机构实现复杂的运动要求时,该机构的设计过程通常是十分艰难的。随着生产的发展,机构的载荷与速度不断提高,对平面多连杆机构设计的要求也越来 越高。因此,如何设计可满足各种工程要求的平面多连杆机构,一直是该领域的重要课题。本报告会举例出使用空间连杆机构的三个例子,并对其进行分析,使我们获得一个空间连杆机构的直观感受。 一.石油钻井台 石油钻头试验机原理如图1 所示, 可模拟石油钻头钻井过程, 以便用来 测试石油钻头的各项性能。钻头试验机原理图模拟工作时, 2 个液压缸向下拉横梁, 横梁通过推力轴承推动钻杆向下运动, 钻杆穿过转盘( 转盘由动力装 置驱动, 除了旋转不可移动) 后接1个万向联轴节( 非普通设计) , 连接着是长3m 的钻杆,在钻杆的顶端装有钻头, 钻头在轴向力及转盘扭矩的共同作用 下向石块( 或铁块) 中钻进, 钻杆移动的行程为1. 2m。钻头在钻进过程中,由于受到很大的冲击轴向力与径向力作用, 振动非常剧烈。尤其是位于钻杆顶部的钻头, 因钻杆为悬臂, 所以其刚性很差, 且随着1. 2m 行程的加大, 钻头到转盘之间的钻杆悬臂长度也加长, 刚性进一步削弱, 最终使石油钻头打出
图解法设计平面四杆机构 3.4.1按连杆位置设计四杆机构 1.给定连杆的三个位置 给定连杆的三个位置设计四杆机构时,往往是已知连杆B C的长度L B C和连杆的三个位置B1C1和B2C2和B3C3时,怎样设计四杆机构呐图解过程。 ::1::::2:: 2.给定连杆的两个位置 给定连杆的两个位置B1C1和B2C2时与给定连杆的三个位置相似,设计四杆机构图解过程如下。 ①选定长度比例尺绘出连杆的两个位置B1C1、B2C2。 ②连接B1B2、C1C2,分别作线段B1B2和C1C2的垂直平分线B12和C12,分别在B12和C12上任意取A,D两点,A,D两点即是两个连架杆的固定铰链中心。连接A B1、C1D、B1C1、 A D,A B1C1D即为所求的四杆机构。 ③测量A B1、C1D、A D计算l A B、L C D L A D的长度, 由于A点可任意选取,所以有无穷解。在实际设计中可根据其他辅助条件,例如限制最小传动角或者A、D的安装位置来确定铰链A、D的安装位置。 例设计一振实造型机的反转机构,要求反转台8位于位置Ⅰ(实线位置)时,在砂箱7内填砂造型振实,反转台8反转至位置Ⅱ(虚线线位置)时起模,已知连杆B C长和两个位置B1C1、B2C2.。要求固定铰链中心A、D在同一水平线上并且A D=B C。自己可以试着在纸上按比例作出图形,再求出各杆长度。若想对答案请点击例题祥解 3.4.2 按行程速度变化系数设计四杆机构 1.设计曲柄摇杆机构 按行程速度变化系数K设计曲柄摇杆机构往往是已知曲柄机构摇杆L3的长度及摇杆摆角ψ和速度变化系数K。怎样用作图法设计曲柄摇杆机构? 2.设计曲柄摆动导杆机构
第八章平面连杆机构及其设计 一、填空题: 1. 平面连杆机构是由一些刚性构件用转动副和移动副连接组成的。 2. 在铰链四杆机构中,运动副全部是低副。 3. 在铰链四杆机构中,能作整周连续回转的连架杆称为曲柄。 4. 在铰链四杆机构中,只能摆动的连架杆称为摇杆。 5. 在铰链四杆机构中,与连架杆相连的构件称为连杆。 6. 某些平面连杆机构具有急回特性。从动件的急回性质一般用行程速度变化系数表示。 7. 对心曲柄滑块机构无急回特性。 8. 平行四边形机构的极位夹角V -. θ0 ________ ,行程速比系数K= ___ 。 9. 对于原动件作匀速定轴转动,从动件相对机架作往复直线运动的连杆机构,是否有急回 特性,取决于机构的极位夹角是否为零。 10. 机构处于死点时,其传动角等于丄。 11. 在摆动导杆机构中,若以曲柄为原动件,该机构的压力角:■ =____ 。 12. 曲柄滑块机构,当以滑块为原动件时,可能存在死点。 13. 组成平面连杆机构至少需要4个构件。 二、判断题: 14. 平面连杆机构中,至少有一个连杆。(√) 15. 在曲柄滑块机构中,只要以滑块为原动件,机构必然存在死点。(√) 16. 平面连杆机构中,极位夹角二越大,K值越大,急回运动的性质也越显著。(√) 17. 有死点的机构不能产生运动。(×) 18. 曲柄摇杆机构中,曲柄为最短杆。(√) 19. 双曲柄机构中,曲柄一定是最短杆。(×) 20. 平面连杆机构中,可利用飞轮的惯性,使机构通过死点位置。(√) 21. 在摆动导杆机构中,若以曲柄为原动件,则机构的极位夹角与导杆的最大摆角相等。 (√ ) 22. 机构运转时,压力角是变化的。(√ ) 三、选择题:
3.4 图解法设计平面四杆机构 3.4.1按连杆位置设计四杆机构 1.给定连杆的三个位置 给定连杆的三个位置设计四杆机构时,往往是已知连杆B C的长度L B C和连杆的三个位置B1C1和B2C2和B3C3时,怎样设计四杆机构呐?图解过程。 ::1:: 2.给定连杆的两个位置 给定连杆的两个位置B1C1和B2C2时与给定连杆的三个位置相似,设计四杆机构图解过程如下。 ①选定长度比例尺绘出连杆的两个位置B1C1、B2C2。 ②连接B1B2、C1C2,分别作线段B1B2和C1C2的垂直平分线B12和C12,分别在B12和C12上任意取A,D两点,A,D两点即是两个连架杆的固定铰链中心。连接A B1、C1D、B1C1、A D,A B1C1D即为所求的四杆机构。 ③测量A B1、C1D、A D计算l A B、L C D L A D的长度, 由于A点可任意选取,所以有无穷解。在实际设计中可根据其他辅助条件,例如限制最小传动角或者A、D的安装位置来确定铰链A、D的安装位置。 例设计一振实造型机的反转机构,要求反转台8位于位置Ⅰ(实线位置)时,在砂箱7内填砂造型振实,反转台8反转至位置Ⅱ(虚线线位置)时起模,已知连杆B C长0.5m和两个位置B1C1、B2C2.。要求固定铰链中心A、D在同一水平线上并且A D=B C。自己可以试着在纸上按比例作出图形,再求出各杆长度。若想对答案请点击例题祥解 3.4.2 按行程速度变化系数设计四杆机构 1.设计曲柄摇杆机构 按行程速度变化系数K设计曲柄摇杆机构往往是已知曲柄机构摇杆L3的长度及摇杆摆角ψ和速度变化系数K。怎样用作图法设计曲柄摇杆机构? 2.设计曲柄摆动导杆机构 已知机架长度l4和速度变化系数K,设计曲柄导杆机构。 ①求出极位夹角 ②根据导杆摆角ψ等于曲柄极位夹角θ,任选一点C后可找出导杆两极限C m、C n。 ③作∠M C N的角评分线,取C A=,得到A点,过A点作C m和C n的垂线B1和B2两点, A B1(或A B2)即为曲柄。测量A B1。求出曲柄长度。 例设计一偏置曲柄滑块机构,已知滑块行程H=88m m,偏心距e=44m m,速度变化系数K=1.4。 自己可以试着在纸上按比例作出图形,再求出各杆长度。
《铰链四杆机构的类型及判定》教学设计 一、教学设计思路 本着以学生能力培养为本位,尊重学生的认知规律和职业成长规律,结合所教学生的实际情况(中职学生好动),在本次课堂教学中以铰链四杆机构的真实工作情境导入教学内容,提出本次课的工作任务,并以教学载体为主线组织教学,完成工作任务。学生课前做模型,老师评,课后按所学新知改进模型,体现“做中学,学中做”的教学思路。通过解析教学载体,使学生掌握知识点,培养学生的动手能力、协作能力。 二、教材分析: 本课内容选自中等职业教育国家规划教材《机械基础》第六章第二节。本教材前面五章的内容都是机械零件的静止运动,常用机构的教学内容需构建运动的思维,是一个由静向动的变化过程,学生应动起来(思维动起来、手动起来)。在教学中,课程第一章中机构的知识得到了运用与提升,同时本学习单元内容也为后续常用机构的学习垫定了基础。 三、教学目标 1、知识目标: (1)、熟悉高、低副接触的运动特点和四杆机构的组成条件。 (2)、掌握铰链四杆机构类型及其判定条件,了解其应用。 2、能力目标: (1)、课前预习并分小组制作铰链四杆机构模型,课后运用所学知识分析存在的问题,改进模型。 (2)、能够判断四杆机构是否存在曲柄,并能够根据已知条件确定四杆机构的形式。 3、情感目标: (1)、培养学生细心观察、分析问题及灵活运用所学知识解决问题的能力。 (2)、通过小组做模型,使学生养成学以致用,大胆实践的精神,同时增强同学间的团队协作意识。 四、教学重难点 教学重点:铰链四杆机构曲柄存在条件的判别及四杆机构类型的确定。 教学难点:铰链四杆机构类型判定条件的应用。 教学关键:杆件的长度、位置与铰链四杆机构类型的关系 突破:做模型、动画、课件 五、教学准备 1、学生准备 (1)、知识储备:掌握运动副、构件、铰链四杆机构的组成等知识;具备初步分析机构运动特点能力。 (2)、预习新课,并在课前试做铰链四杆机构。 2、教师准备 (1)、准备制作铰链四杆机构的材料、课件、动画、教案、教学载体。 (2)、教学方法:讲授法、任务设计法、案例教学法(以教学载体为主线)、小组协作法。 (3)、教学资源:多媒体课件、投影仪、黑板、动画、机构模型