
第2章 TMS320F281x系统控制和中断外围
2.1 TMS320F28x的存储器
2.1.1 Flash和OTP存储器简介
本节描述281x中的Flash和一次性编程OTP存储器特点。
片内Flash存储器在程序和数据存储器空间中均匀分布。Flash 存储器有如下特点:
z多个分区
z有代码安全保护
z有低功耗模式
z可根据CPU频率调整的等待状态
z Flash管线模式可提高性能
2K×16的OTP存储器用于存放TI公司专用的工程和制造信息。余下空间用户可以用来存放自己的代码或数据。
有一些相关的寄存器可以用于配置Flash和OTP存储器。但必须注意的是只有在执行了EALLOW指令后,才可以将数据写入这些寄存器。执行了EDIS指令后,数据写入操作被禁止执行。这可以保护寄存器免于被干扰。读寄存器操作一直可以进行。通过JTAG仿真口可以读写这些寄存器内容而不用执行EALLOW指令。寄存器支持16位和32位操作。
注意:执行Flash寄存器配置任务的代码不能放在Flash或OTP存储器中执行。代码应该放在Flash和OTP外的其它RAM空间进行。而且当Flash或OTP存储器中正在跑程序时也不要对Flash和OTP寄存器进行操作,直到程序结束后才可进行操作。在Flash/OTP中运行的代码可以读Flash寄存器中的内容,但千万不要写内容进去。这样做是为了避免时序上的混乱。
2.1.2 Flash和OTP功耗模式
Flash和OTP有三种功耗模式
z复位或睡眠状态:DSP复位后的缺省模式,该模式下存储器部分和激活部分均处于睡眠状态(最低功耗)。
z备用状态:在该状态或睡眠状态下进行CPU的读或取操作将自动使DSP的工作模式变为活跃状态。
z活跃或读状态:该状态下DSP功耗最高。
在从Flash/OTP中读或执行代码操作期间,功耗模式是保持不变的。如果要改变功耗模式,可以采用如下几种方法:
z移到低功耗状态:如果要将DSP从高功耗模式带入更低一点的功耗模式,只需改变PWR 模式位(FPWR寄存器中)就可瞬时完成。寄存器操作应该在flash/OTP外进行。
z将DSP从低功耗模式带入更高功耗模式:
1.改变FPWR寄存器中的PWR模式位。
2.开始一个flash/OTP存储器的读或程序取指令过程
当DSP从低功耗模式转入高功耗模式时存在一段延时,该延时用于使flash稳定。如果
在这段延时时间内就开始对flash/OTP进行操作,则CPU的操作会自动停止直到延时过程结束。延时时间是由用户软件控制的。FSTDBYWAIT寄存器中的值决定从睡眠模式到备用模式的延时。FACTIVEWAIT寄存器中的值决定从备用模式到活跃模式的延时。如果要从睡眠模式直接跳到活跃模式,延时由FSTDBYWAIT+FACTIVEWAIT决定。
2.1.3 Flash和OTP性能
CPU对flash/OTP的操作可采用如下方式中的一种:
z32位取指令
z16位或32位数据空间读操作
z16位程序空间读操作
一旦flash处于活跃状态,对存储体的读写处理有如下三种类型:
z Flash存储器随即存取:FBANKWAIT寄存器中的RANDWAIT位可决定随即存取的等待状态时间。缺省值为最大值,为了提高性能,用户可以根据CPU时钟和flash的处理时间填入合适的值。
z Flash存储器页面存取:flash阵列由行和列组成。行包含2048位的信息。对行的第一次操作是随即存取,接下来的在相同行的操作速度会变快,这被叫做页面存取操作。通过在FBANKWAIT寄存器中的PAGEWAIT位中放进较小的数,可以加快flash的处理速度。这种工作模式适用于数据空间和程序空间的读和取指令操作。
z OTP操作:FOTPWAIT寄存器中的OTPWAIT位决定OTP的读或取指令操作。由于没有页面存取模式,OTP的处理时间要比flash长。
2.1.4 Flash管线模式
Flash存储器一般用于存放用户代码。为了提高代码执行的性能,可以采用flash管线模式。FOTP寄存器中的ENPIPE位用于启动flash管线模式。该模式独立于CPU管线。该模式下,一种预取指令机制可用于减少flash等待状态的影响,显著提高在flash中执行代码的效率。
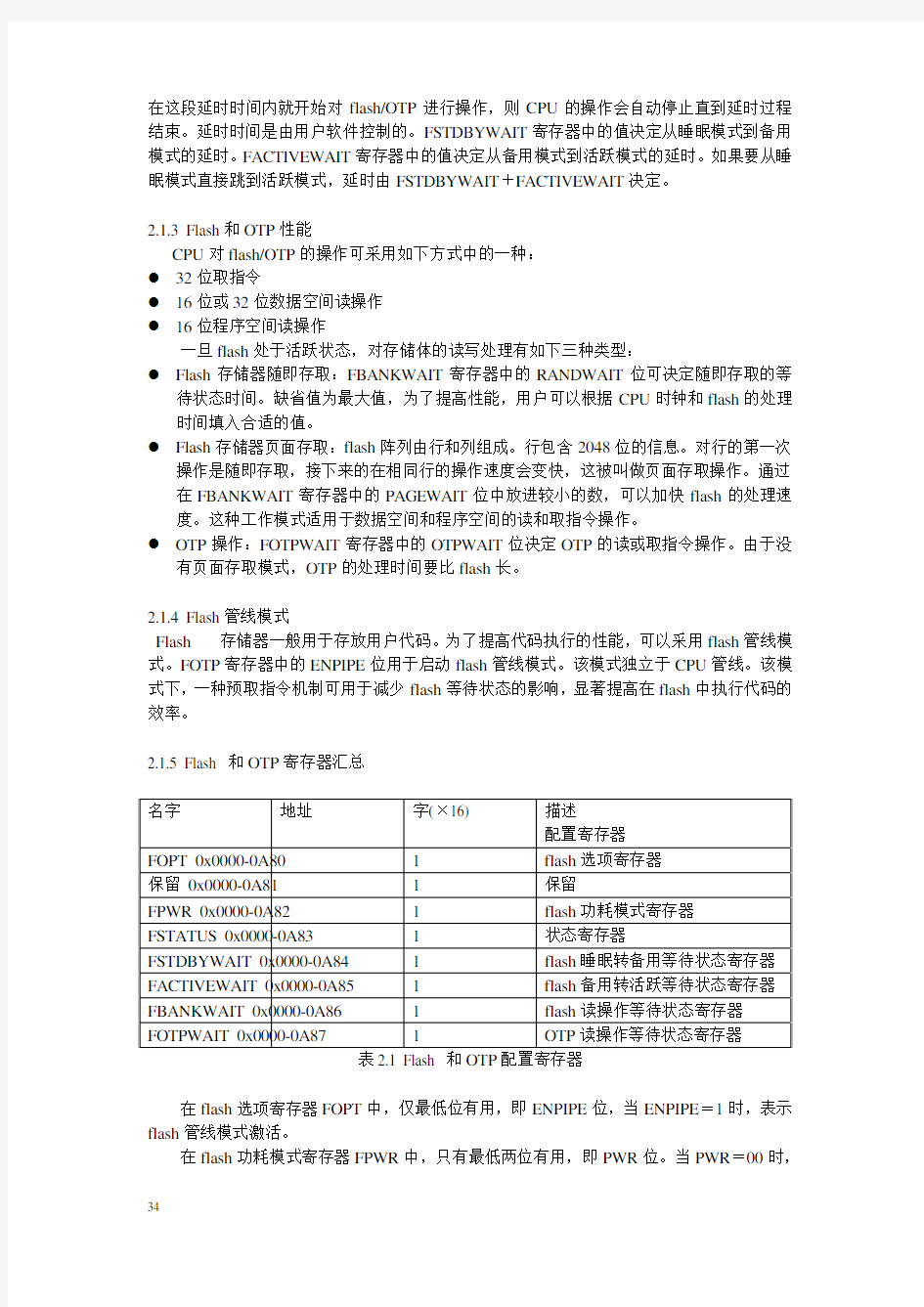
2.1.5 Flash 和OTP寄存器汇总
名字地址字(×16) 描述
配置寄存器
FOPT 0x0000-0A80
1 flash选项寄存器
1 保留
保留 0x0000-0A81
1 flash功耗模式寄存器
FPWR 0x0000-0A82
1 状态寄存器
FSTATUS 0x0000-0A83
FSTDBYWAIT 0x0000-0A84 1 flash睡眠转备用等待状态寄存器FACTIVEWAIT 0x0000-0A85 1 flash备用转活跃等待状态寄存器FBANKWAIT 0x0000-0A86 1 flash读操作等待状态寄存器FOTPWAIT 0x0000-0A87 1 OTP读操作等待状态寄存器
表2.1 Flash 和OTP配置寄存器
在flash选项寄存器FOPT中,仅最低位有用,即ENPIPE位,当ENPIPE=1时,表示flash管线模式激活。
在flash功耗模式寄存器FPWR中,只有最低两位有用,即PWR位。当PWR=00时,
flsh和OTP处于最小功耗状态(睡眠模式);PWR=01时为备用模式;PWR=10时保留;PWR =11时flsh和OTP处于最高功耗状态(激活模式)。
Flash状态寄存器FSTATUS中,第8位为可读可写的3VSTAT位,当它为1时,表示3V 电源超出了允许的范围。向其内写1可以清除掉它,写0无效。FSTATUS中其它位为只读位,分别描述了flash/OTP寄存器中的一些计数器的状态和功耗模式。
Flash由睡眠转备用等待状态寄存器FSTDBYWAIT、flash由备用转活跃等待状态寄存器FCTIVEWAIT、flash读操作等待状态寄存器FBANKWAIT、OTP等待状态FOTPWAIT 寄存器等四个寄存器主要定义了flash/OTP的等待时序。限于篇幅,上述寄存器详细的使用方法这里不做更多解释,请参考英文参考文献SPRU078.pdf。
2.1.6 Flash初始化程序实例
下面给出了一个flash存储器初始化的C语言例子,双斜线//符号后为程序说明。
#include "DSP28_Device.h" // 在DSP28_Device.h头文件中定义了相关常量和头文件
#pragma CODE_SECTION(InitFlash, "ramfuncs"); // InitFlash函数的代码放在空间ramfuncs中
//在cmd文件中,ramfuncs必须有独立的加载和运行地址void InitFlash(void)
{
EALLOW; //允许对flash寄存器进行操作
//of code executed from Flash.
FlashRegs.FOPT.bit.ENPIPE = 1; //启动管线模式以提高性能
FlashRegs.FPWR.bit.PWR = 3; //flash运行于活跃模式
FlashRegs.FSTATUS.bit.V3STAT = 1; //向该位写1表示清除报警
// 小心
//在一定的CPU频率下,flash 操作要求一定的等待状态时间,最小时间由TI公司决定 FlashRegs.FBANKWAIT.bit.RANDWAIT = 5;//设置flash随机存取等态时间FlashRegs.FBANKWAIT.bit.PAGEWAIT = 5; //设置flash页面存取等态时间
FlashRegs.FOTPWAIT.bit.OPTWAIT = 5; //设置OTP读等态时间
// 小心
//在一定CPU频率下,改变不同功耗模式需要一定转换时间,最小时间由TI公司决定//下面是缺省值
FlashRegs.FSTDBYWAIT.bit.STDBYWAIT = 0x01FF;//设置从睡眠到备用模式的转换时间FlashRegs.FACTIVEWAIT.bit.ACTIVEWAIT = 0x01FF; //设置从备用到活跃的转换时间EDIS; //不允许对flash寄存器进行操作
asm(" RPT #7 || NOP "); //等待若干周期使上述操作起作用后flash的运行稳定下来}
2.2 代码安全模块
代码安全模块CSM可以防止没有经过授权的人看到片内存储器中的内容,防止对受保护的代码进行复制和反向工程。在下文中,安全的意思是对片内存储器的访问受到保护;而不安全的意思是可以通过某些手段(例如调试工具CCS)读出存储器中的内容,因而其内容是不受保护的。
2.2.1 功能描述
安全模块限制了CPU对片内存储器的访问,这实际上可以阻断通过JTAG口或其它外围设备对存储器的读写操作。在安全的时候,有两种保护级别,这和程序计数器指针正指向何处有关。如果代码正在安全存储器内运行,仅仅是仿真器(即JTAG)的访问被阻断,而代码本身可以访问受安全保护的数据。相反,如果代码正在不安全的存储器中运行,所有到安全存储器的存取操作全被阻塞。
用户代码可以动态跳进、跳出安全存储器,所以允许在安全存储器运行的程序从不安全的存储器中调用函数。类似地,即使主程序正在不安全的存储器中运行,中断服务子程序也可以放在安全存储器内被调用。
通过一个128位(8个16位的字)密码,DSP的安全可以得到保护。但在执行了密码匹配流程PMF后,DSP就不安全了,后面将会讲到PMF。
PMF用正确的密码运行了吗? 操作模式程序取指令位
置
安全性描述
No 安全安全存储器外仅允许到安全模块取指令
No 安全安全存储器内 CPU有全部权利,JTAG不能读安全存储器
中的内容
Yes 不安全任何地方 CPU和JTAG对安全模块的操作不受限制
表2.2 安全级别
密码存放在flash/ROM存储器中的代码安全密码区(PWL),地址为0x003F7FF8~0x003F7FFF。该区存放着由设计者事先定好的密码。在flash型DSP中,旧的密码知道后可以改成新密码,而在ROM型DSP中,密码由TI公司一次性烧写好,不能被改动。
如果PWL中的密码为全1,DSP也是不安全的。因为在DSP中flash内容被擦除后,就变为全1,仅需从PWL中读一下就可使DSP不安全。如果PWL中的密码为全0,DSP 是安全的,但不要这样做,因为这样DSP就再也不能被调试或重新编程。如果在对flash执行了清除(clear)过程后立即复位DSP,PWL中的密码也会为全0,所以也不要这样做。
要使DSP处于安全或不安全的状态,用户可以通过访问相关寄存器来进行。这些寄存器共有8个,每个寄存器的长度均为16位,被称作关键字(KEY)寄存器,这些寄存器映射到存储器空间的0x00000AE0~0x00000AE7地址中,并受EALLOW保护。
如果要使用代码安全操作,在0x3F 7F80~0x3F 7FF5之间的地址就不能放程序代码或数据,而是必须全部编程为0。如果不使用代码安全功能,则这片区域就可用于编程或放数据。
2.2.2 代码安全模块对其他片内资源的影响
无论何时,不管DSP是安全还是不安全的,CSM都对下面的片内资源没有影响:
z没有设计成受安全保护的SARAM:这些SARAM,无论任何时候都可以在其中运行程序或对其读写。
z BOOT ROM:对导引ROM中内容的读取不受CSM影响。
z片内外围寄存器:用户可以在片内或片外存储器中运行程序对外围寄存器进行初始化。z PIE矢量表:矢量表可以被任意读写,无论DSP是否安全。
表2.3和表2.4列出了所有受和不受CSM影响的2812/2810片内资源。
地址块
0x0000 8000--0x0000 8FFF L0 SARAM(4K×16)
0x0000 9000--0x0000 9FFF L1 SARAM(4K×16)
0x003D7800--0x003D7BFF 一次性可编程OTP(1K×16)
0x003D8000--0x003F7FFF Flash(128K×16或64K×16)
表2.3 F2812/2810中受CSM影响的资源
地址块
0x0000 0000--0x0000 03FF M0 SARAM(1K×16)
0x0000 0400--0x0000 07FF M1 SARAM(1K×16)
0x0000 0800--0x0000 0CFF 外围帧1(2K×16)
0x0000 0D00--0x00000FFF PIE矢量RAM(256×16)
0x0000 2000--0x0000 3FFF XINTF Zone0
0x0000 4000--0x0000 5FFF XINTF Zone1
0x0000 6000--0x0000 6FFF 外围帧1(4K×16)
0x0000 7000--0x0000 7FFF 外围帧2(4K×16)
0x0008 0000--0x000F FFFF XINTF Zone2
0x0010 0000--0x0017 FFFF XINTF Zone6
0x003F 8000--0x003F9FFF H0 SARAM (8K×16)
0x003F 0000--0x003FFFFF XINTF Zone7
0x003F F000--0x003FFFFF Boot ROM (4K×16)
表2.4 F2812/2810中不受CSM影响的资源
2.2.3 如何使用代码安全保护功能
一般情况下,在开发阶段并不需要代码安全保护,只有当软件开发完毕后才需要。在代码烧进flash存储器前(或烧进ROM前),你可以选择一个密码用来保护你的代码。一旦密码烧进PWL后,复位DSP或令CSMSCR寄存器中的FORCESEC位为1,DSP就处于安全状态。在安全存储器外面运行程序是不需要密码的,但调试时要访问安全存储器就需要密码。 CSM的寄存器见表2.5和图2.1。
存储器地址寄存器名称复位值寄存器描述
关键字寄存器-可由用户更改
0x0000-0AE0 KEY0? 0xFFFF 128-位关键字寄存器的最低字
0x0000-0AE1 KEY1? 0xFFFF 128-位关键字寄存器的第二个字
0x0000-0AE2 KEY2? 0xFFFF 128-位关键字寄存器的第三个字
0x0000-0AEB KEY3? 0xFFFF 128-位关键字寄存器的第四个字
0x0000-0AE4 KEY4? 0xFFFF 128-位关键字寄存器的第五个字
0x0000-0AE5 KEY5? 0xFFFF 128-位关键字寄存器的第六个字
0x0000-0AE6 KEY6? 0xFFFF 128-位关键字寄存器的第七个字
0x0000-0AE7 KEY7? 0xFFFF 128-位关键字寄存器的最高字
0x0000-0AEF CSMSCR?CSM
状态和控制寄存器
存储器中的密码区-保留给密码字使用
0x003F-7FF8 PWL0 用户定义 128-位密码的最低字
0x003F-7FF9 PWL1 用户定义 128-位密码的第二个字
0x003F-7FFA PWL2 用户定义 128-位密码的第三个字
0x003F-7FFB PWL3 用户定义 128-位密码的第四个字
0x003F-7FFC PWL4 用户定义 128-位密码的第五个字
0x003F-7FFD PWL5 用户定义 128-位密码的第六个字
0x003F-7FFE PWL6 用户定义 128-位密码的第七个字
0x003F-7FFF PWL7 用户定义 128-位密码的最高字
?EALLOW 保护
表2.5 代码安全模块CSM寄存器
图2.1 CSM状态和控制寄存器CSMSCR
位名称描述
15 FORCESEC 写1可以清KEY寄存器,并使DSP安全。读总是返回0。
0 SECURE 只读位,反映了DSP现在的状态。
1:DSP安全,CSM锁定
0:DSP不安全,CSM被解锁
在很多情况下我们需要使DSP不安全,下面是一些典型情况:
z通过调试器(例如CCS)进行代码开发时。
z用TI公司的烧写软件进行flash编程时。一旦用户提供了密码后,烧写软件就使DSP中的安全逻辑失效,并开始对flash编程。Flash烧写软件可以在没有密码的情况下使一个新DSP中的安全逻辑失效,因为新DSP中的flash是擦除过的,其内容是全1。然而,对一个包含了用户密码的DSP重新编程时就需要密码了。
z由应用确定的用户环境。例如,用片内的导引加载器编程flash;或者需要在外部存储器或片内没有安全保护的存储器中执行代码,同时又需要对受保护的存储器进行查表操作。建议一般不要这样做,因为从外部程序中提交密码会降低安全性。
为了使模块不安全,在所有上述提到场合的操作方法都是一样的。这个过程被称为密码匹配流程(PMF)。图2.2描述了该操作流程。PWF本质上讲就是一个从PWL中进行8次哑读并对KEY寄存器进行8次写的过程。
PMF在进行解除DSP的安全性操作时可能遇到两种情况:
情况1:如果DSP在PWL处有密码,需进行如下步骤来解除安全保护:1)从PWL处进行8次哑读。
2)写密码到KEY寄存器。
3)如果密码正确,DSP就不安全了,否则DSP仍保持安全。
情况2:如果DSP没有密码保护,那么在PWL处应该是全1,那么需进行如下步骤:
1) 从PWL 处进行哑读
2) 上面的操作完成后,DSP 立马就不安全了,可以随意对存储器进行操作。
图2.2 密码匹配流程PMF 示:如果要解除存储器的安全保护,在对存储器进行读、写或编程操作前,不管DSP 护的。所以如果要使用这两个空间,include
"DSP28_Device.h" //在DSP28_Device.h 头文件中定义了相关寄存器 int16 *PWL; //定义一个PWL 指针 ,参见后面章节的内容
提受没受到密码保护,一定要先进行哑读操作。什么叫哑读?就是PWL 中的内容实际上是不能读出的,执行读操作后读出的数据与PWL 中真正的内容并不一致(全1和全0除外)。 下面举一个实例,说明如何使用代码安全模块。 因为在DSP 复位后,L0和L1存储器是受安全保就必须进行解除安全保护的操作,下面是一个C 语言编程的例子,用于说明如何解除DSP 对L0和L1的保护。
#void InitSysCtrl(void) { Uint16 i5;
volatile U … //其它初始化过程暂略
; 在调试阶段保持所有的密码字为0xFFFF 不变,因此下面的向KEY0~KEY7寄存器中 s.KEY7=密码字 在执行了上述程序后,就可以毫无阻碍的对L0和L1存储器进行读写了。 2.3 时钟
本节描述2812/2810的振荡器、锁相环PLL 、时钟原理、看门狗和低功耗模式。
PWL = &CsmPwl.PSWD0; //PWL 指针指向PSWD0处,即0x003F7FF8处for(i5=0;i5<8;i5++) i= *PWL++//进行8次哑读
// //写入密码字的语句可以省略。否则就要向KEY 寄存器中写入密码字。 // EALLOW ; //KEY0-KEY8受EALLOW 保护 // CsmRegs.KEY0=密码字 // … // CsmReg // EDIS ; }
图2.3 作用于不同外围的时钟和复位电路
显示了作用于不同外围的的时钟和复位电路。图中,CLKIN 是输入到CPU 的时时钟、看门狗、低功耗模式由相关寄存器控制。图2.4~图2.7 描述了不同寄存 图2.3钟信号,CLKIN 没有作处理就直接从CPU 输出,成为SYSCLKOUT 信号,即两种信号频率相等。
PLL 、器的定义及使用方法。注意这些寄存器全都受到EALLOW 保护。
图2.4 外围时钟控制寄存器PCLKCR 位 名字
1,则使能CAN 外设中的系统时钟SYSCLKOUT 。 1,则使能McBSP 外设中的低速时钟LSPCLK 。 1,则使能SPI 外设中的低速时钟。 1,则使能ADC 外设中的高速时钟HSPCLK 。 1,则使能EVB 外设中的高速时钟HSPCLK 。 如果不使用某个外设,可将上述相应的时钟使能位设为0,屏蔽相应的时钟信号,禁止描述 15 保留 保留
14 ECANENCLK 若设为13 保留 保留
12 MCBSPENCLK 若设为11 SCIBENCLK 若设为1,则使能SCI -B 外设中的低速时钟LSPCLK 。 10 SCIAENCLK 若设为1,则使能SCI -A 外设中的低速时钟LSPCLK 。 9 保留 保留 8 SPIENCLK 若设为7-4 保留 保留 3 ADCENCLK 若设为2 保留 保留 1 EVBENCLK 若设为0 EV AENCLK 若设为1,则使能EV A 外设中的高速时钟HSPCLK 。
该外设工作,从而降低DSP 功耗。所有位上电后均复位为0,即缺省状态为所有外设均不工作。
图2.5 系统控制和外设状态寄存器SCSR
位 名字 描述 中断状态位。反映了看门狗电路中WDINT 信号的状态。
15-3 保留 保留
2 WDINTS 看门狗1 WDENINT 如果设为1,看门狗复位WDRST 输出信号禁止,看门狗中断
WDINT 信号使能。如果为0,WDRST 输出信号使能,WDINT
时的缺省状态),
用户可以改变WDCR 看门狗控制 信号禁止。
0 WDOVERRIDE 如果为1(复位 寄存器中WDDIS 位的状态;如果写1清0,则用户不能修改 WDDIS 位。写0不起作用。如果清0,它就会保持现在的状态 不变直到下一次复位。
图2.6 高速外围时钟定标寄存器HISPCP
SYSCLKOUT 分频,产生高速外围时钟信号HSPCLK 。 位 名字 描述 15-3 保留 保留 2-0 HSPCLK 用于对 如果HISPCP 不为0,则HSPCLK=SYSCLKOUT/(HISPCP*2), 如果HISPCP 为0,则HSPCLK=SYSCLKOUT 。例如复位后 HISPCP 缺省值为001,则HSPCLK =SYSCLKOUT/2。 (HISPCP 指2-0位中的内容)
图2.7 低速外围时钟定标寄存器LOSPCP
位 名字 描述 SYSCLKOUT 分频,产生低速外围时钟信号LSPCLK 。 在图中,注解的含义为:R-0:只读且复位后为0,R-1:只读且复位后为1;R/W1C-1:2.4 振荡器和锁相环
F2812/F2810片内有一个基于锁相环PLL 该模块提供时钟信号,同时也可的X1/CLKIN 和X2脚,DSP 内部的
z 来自于输入到
15-3 保留 保留 2-0 LSPCLK 用于对 如果LOSPCP 不为0,则LSPCLK=SYSCLKOUT/(LOSPCP*2), 如果LOSPCP 为0,则LSPCLK=SYSCLKOUT 。例如复位后 LOSPCP 缺省值为010,则LSPCLK =SYSCLKOUT/4。 (LOSPCP 指2-0位中的内容)
可读写,写1清除,复位后为1;R/W-010可读写,复位后为010。后面类似。
的时钟模块。用于低功耗模式。基于PLL 的模块有两种工作方式:
z 晶振工作方式。该模式下,外部无源晶振连到DSP 振荡电路和无源晶振一起运行产生时钟,提供给DSP 作为时间基准。
外部时钟源工作方式。该模式下,内部振荡器不再使用,DSP 的时钟X1/CLKIN 脚的外部时钟信号,X2脚悬空。
图2.8描述了2812/2810内的OSC 和PLL
模块
图2.8 OSC 和PLL 模块
图2.8中可看到PLL 的几种配置模式,见表
2.6
LL SYSCLKOUT
P 模式 说明 PLL 禁止 若DSP 复位时XF_PLLDIS 低,则进入该模式,通往引脚为CPU 的时钟信号CLKIN 直接来自X1脚的时钟输入。 XCLKIN PLL 直通 将XCLKIN/2 如果PLL 没有被禁止,这就是复位后的缺省模式。内部X1脚时钟输入除2后再输出。
PLL 使能
值n ,可以产生n 倍频的XCLKIN*n/2
往PLLCR 寄存器内写入一个非零振荡信号,该信号除2后输出。
表2.6 锁相环的三种配置模式
图2.9 PLLCR 寄存器
位 名字 描述 控制PLL 是否直通并设置不直通时的PLL 倍频系数。
15-4 保留 保留 3-0 DIV DIV 位 0000 CLKIN=OSCCLK/2 (PLL 直通) 0001 CLKIN=OSCCLK*1/2 0010 CLKIN=OSCCLK*2/2 0011 CLKIN=OSCCLK*3/2 0100 CLKIN=OSCCLK*4/2 0101 CLKIN=OSCCLK*5/2 0110 CLKIN=OSCCLK*6/2 0111 CLKIN=OSCCLK*7/2 1000 CLKIN=OSCCLK*8/2
1001 CLKIN=OSCCLK*9/2 1010 CLKIN=OSCCLK*10/2 1011-1111 保留 下面是一个时钟模块和锁相环初始化C 语言编程的例子。 oid EALLOW; PLLCR = 0x0008; //初始化锁相环,例如本例为120MHz ; i++){ } x0000; //HSPCLK=SYSCLKOUT=120M K 1; ;
ADC ,参见后面章节 2.5 低功耗模式
F2812/F2810的低功耗模式LPM 和F240x 的相似。表2.7总结了各个功耗模式的区别。 281x 的睡眠(IDLE)模式和F240x 的不同。
在F281x 中,CPU 的时钟输出SYSCLKOUT 下,甚至在CPU 时钟(CLKIN)关掉的情况几种低功耗模式分别是: 的中断或NMI 信号可以使DSP 退出该模式。当LPMCR[1:0] z 悬停(HALT)模式:在悬停模式下,只有v InitSysCtrl(void) //系统初始化子程序 {
SysCtrlRegs. asm(" NOP "); //等待锁相环锁定 asm(" NOP ");
for(i= 0; i< 30000 SysCtrlRegs.HISPCP.all = 0 SysCtrlRegs.LOSPCP.all = 0x0002; //LSPCLK=SYSCLKOUT/4 SysCtrlRegs.PCLKCR.bit.EV AENCL =//使能EV A ,参见后面章节 SysCtrlRegs.PCLKCR.bit.EVBENCLK=1; //使能EVB ,参见后面章节 SysCtrlRegs.PCLKCR.bit.SCIENCLKA=1; //使能SCI_A ,参见后面章节 //SysCtrlRegs.PCLKCR.bit.SCIENCLKB=1; //不用的外围不使能, //SysCtrlRegs.PCLKCR.bit.MCBSPENCLK=1;//以降低功耗 //SysCtrlRegs.PCLKCR.bit.SPIENCLK=1; //SysCtrlRegs.PCLKCR.bit.ECANENCLK=1 SysCtrlRegs.PCLKCR.bit.ADCENCLK=1; //使能 EDIS; }
其中,最后一列表示在什么条件下或什么信号可使DSP 退出低功耗模式。这些信号必须保持足够长时间的低电平以便DSP 能响应它的中断申请,否则DSP 不会退出该低功耗模式。
F 一直有效,而在F240x 中SYSCLKOUT 关掉。
F281x 的备用(STANDBY)和悬停(HALT)模式下,JTAG 口都一直有效。 z 睡眠(IDLE)模式:任何被使能 位设为0,0后,DSP 进入该模式,此后LPM 模块停止执行任务。
XRS 和XNMI 信号可以唤醒DSP 。通往CPU /禁 多个信号将DSP 从备用模式下 的XNMI 输入在XNMICR 寄存器中有允许止位。
z 备用(STANDBY)模式:在LPMCR1寄存器中可以选用 唤醒。LPMCR0寄存器中可以设置被选择唤醒信号的采样的OSCCLK 时钟数。
表2.7 F2812/F2810低功耗模式
图2.10 低功耗模式控制0寄存器LPMCR0 位 名字 复STDBY 全1
设定输入信号采样的时钟数,用于将DSP 从备用模式下唤 65 OSCCLKS LPM 模式位仅仅在IDLE 指令执行后才有效。用户必须在执行IDLE 之前设置好LPM 位值 描述
15-8 保留
7-2 QUAL 醒,000000=2 OSCCLKS 000001=3 OSCCLKS …
111111=1-0 LPM 00 这些位设置DSP 的低功耗模式
模式位。
图2.11 低功耗模式控制1寄存器LPMCR1
在LPMCR1中,如果某个位设1,就允许被选择的信号将DSP 从备用模式下唤醒。如2.6 看门狗模块
2812/2810中的看门狗模块和24x 系列DSP 中的相似。一旦8位的看门狗计数器达到最 果该位被清除,则该信号无影响。
大计数值,看门狗模块就产生一个512 个OSCCLK 周期宽的脉冲,使DSP 复位。为了防止这种情况出现,用户必须禁止定时器工作,或者周期性地往看门狗关键字寄存器内写入0x55+0xAA 。图2.12 描述了看门狗模块的工作原理。
图2.12 看门狗模块
当DSP 处在在备用模式时,除了看门狗外的所有外设都被关掉。看门狗模块同时也关了 掉PLL 或振荡器的时钟。WDINT 信号送到了LPM 块,因此可将DSP 从备用模式下唤醒。在睡眠模式下,WDINT 可以申请中断(PIE 中的WAKEINT 中断)
,从而将CPU 拉出睡眠状态。在悬停模式下,振荡、PLL 和看门狗全部被关掉。看门狗寄存器见图2.13~2.15,它们全部受EALLOW 保护。
向
CPU
图2.13看门狗计数寄存器WDCNTR
名字
描述 下WD 计数器的值。该8位计数器按WDCLK 时钟频率 位15-8 保留 保留
7-0 WDCNTR 反映当 不断增计数,如果溢出,则引起DSP 复位。如果WDKEY 寄存
器写入了正确的数,则WDCNTR 清0。
图2.14 看门狗复位关键字寄存器WDKEY
名字 描述 0x55,再写入0xAA 就会使WDCNTR 清0。写入任何其 位15-8 保留 保留 7-0 WDKEY 先写入 它数则马上使DSP 复位。读操作返回的是WDCR 的值。
图2.15 看门狗控制寄存器WDCR
名字 描述 复位状态标志位。如果为1,表示看门狗复位;为0,表 在此处写入101,
写入任何其它值都会立即引 WDCLK : ,看门狗在下面几种情况下会表现不同: 挂。 恢复正常操作。 时中断时 位15-8 保留 保留
7 WDFLAG 看门狗 示是外部复位或上电复位。该位写1清除,否则状态一直保持。 6 WDDIS 写1屏蔽看门狗模块,写0使能看门狗模块。只有在SCSR 寄 存器中的WDOVERRIDE 位设为1后才能修改该位。复位后看 门狗模块使能。
5-3 WDCHK 用户无论何时都要 起复位(如果看门狗使能)。 2-0 WDPS 这些位用来配置看门狗的时钟 000 WDCLK =OSCCLK/512/1 001 WDCLK =OSCCLK/512/1 010 WDCLK =OSCCLK/512/2 011 WDCLK =OSCCLK/512/4 100 WDCLK =OSCCLK/512/8 101 WDCLK =OSCCLK/512/16 110 WDCLK =OSCCLK/512/32 111 WDCLK =OSCCLK/512/64 仿真时 CPU 悬挂: CPU 悬挂时,WDCLK 也悬 自由运行模式: CPU 处于自由运行模式时,看门狗 实时单步模式: CPU 处于实时单步模式时,WDCLK 悬挂。甚至在实 看门狗也保持悬挂
实时自由运行模式: CPU 处于实时自由运行模式时,看门狗正常操作。 等。这样81x ysCtrlRegs.WDCR= 0x0068; // SysCtrlRegs 为一个包含WDCR 的结构,参见后面章节 2.7 CPU 定时器
2812/2810除了有通用定时器GP TIMER 外,还增加了三个CPU 定时器T0、T1、T2。 一般DSP 和带有看门狗功能的EEPROM 如X5043配合使用,用于存储数据2自身的看门狗功能一般就不用。在系统初始化程序中加入下面一句话就可以屏蔽看门狗: S 上句一般加在系统初始化子程序InitSysCtrl()的最前面,而且InitSysCtrl()要在主程序中最先调用。因为281x 上电时看门狗是使能的,所以要尽快屏蔽,以免程序跑飞。上电后SCSR 寄存器中的WDOVERRIDE 位为1,即允许WDCR 寄存器中的WDDIS 位被修改,所以不用先对WDOVERRIDE 位操作就能修改WDDIS 位。
其中CPU 定时器T1和T2保留给实时操作系统(例如DSP -BIOS )使用,只有CPU 定时器T0 开放给用户使用。
图2.16 CPU 定时器
在2812/2810中,定时器中断信号(TINT0、TINT1、TINT2)向CPU 申请中断信号方
式如下图所示。
图2.17 CPU 定时器中断信号和输出信号
定时器使用方法为:向32位计数寄存器IMH :TIM 内载入计数值,该值放在周期寄器T 存PRDH :PRD 内。然后计数值按SYSCLKOUT 的频率衰减,减到零后,就有一个定时器中断信号输出。
图2.18 TIMERxTIM 寄存器(x=0,1,2) 位 名字
TIMH:TIM :TIM 寄存器含32位计数值 描述
15-0 TIM CPU 定时器计数寄存器 中的低16位。TIMH 寄存器含32位计数值中的高16位。每过 TDDRH :TDDR +1个时钟时TIMH:TIM 就减1。减到0时保存 在PRDH:PRD 寄存器中的周期值被重载入TIMH:TIM 寄存器,
同时产生定时器中断TINT 信号。
图2.19 TIMERxTIMH 寄存器(x=0,1,2)
TIMERxTIMH 寄存器用法参见TIMERxTIM 。
图2.20 TIMERxPRD 寄存器(x=0,1,2)
位 名字
描述
PRDH:PRD :
PRD 寄存器含32位周期值
15-0 PRD CPU 定时器周期寄存器 中的低16位。PRDH 寄存器含32位周期值中的高16位。 TIMH:TIM 减到0时,在下一个定时器输入时钟的开始,
PRDH:PRD :PRD 寄存器中的周期值重新载入TIMH:TIM 寄存 器。当定时器控制寄存器TCR 中的TRB 位置1时,重载也会发
生。
图2.21 TIMERxPRDH 寄存器(x=0,1,2)
TIMERxPRDH 寄存器用法参见TIMERxPRD 。
图2.22 TIMERxTCR寄存器(x=0,1,2)
位名字描述
15 TIF 定时器中断标志位,定时器每减到0后就变1,写1后清除。
14 TIE 定时器中断使能位。定时器减到0时该位置1,定时器发出中断请求。13-12 保留保留
11-10 FREE 定时器仿真模式,在高级语言调试环境下,如果遇到断点,这些位决定定 SOFT 时器的状态。在遇到软件断点后,如果FREE=1,定时器继续运行;如果FREE=0,且SOFT=0,定时器在TIMH:TIM寄存器下一次减操作
时立即停止;如果FREE=0,且SOFT=1,定时器在TIMH:TIM寄存
器减到0时才停止。
9-6 保留保留
5 TRB 定时器重载位。置1时,TIMH:TIM自动将PRDH:PRD的值载入,且
PSCH:PSC自动将TDDRH:TDDR的值载入。
4 TSS 定时器停止状态位。置1时定时器停止,置0时定时器开始工作。复位时
TSS为0,CPU定时器立即开始工作。
3-0 保留保留。
图2.23 TIMERxTPR寄存器(x=0,1,2)
位名字描述
15-8 PSC 定时器预定标计数器。当PSCH:PSC大于0时,每个时钟SYSCLKOUT 都使PSCH:PSC减1。减到0后的第一个时钟会使TDDRH:TDDR的
值载入PSCH:PSC,同时TIMH:TIM减1。当TRB由软件置1时重载
也会发生。PSCH:PSC的值不能由软件设置,只能由TDDRH:TDDR
载入。复位后PSCH:PSC为0。
7-0 TDDR CPU定时器分频数。每TDDRH:TDDR+1个SYSCLKOUT时钟会使TIMH:TIM减1。复位时TDDRH:TDDR清0。PSCH:PSC为0后的
第一个时钟,或软件将TCR寄存器中的TRB位置1时都会使TDDRH:
DDR的值重新载入PSCH:PSC。
图2.24 TIMERxTPRH寄存器(x=0,1,2)
TIMERxTPRH寄存器的用法参见TIMERxTPR寄存器。
下面是一个CPU定时器的使用实例。对CPU定时器的初始化过程放在子程序InitCpuTimers()和ConfigCpuTimer()中,这两个子程序可单独放在一个文件中,例如一般取名DSP28_CpuTimers.c。在主程序中,先要调用InitCpuTimers()对CPU定时器进行初始化,然后调用ConfigCpuTimer()对所需要的定时器进行周期等参数的设置。程序中涉及到的寄存器定义和头文件等部分由于篇幅限制此处略。
CPU定时器初始化文件DSP28_CpuTimers.c的内容:
//定义了许多常量和宏,并包含所有的头文件"DSP28_Device.h"
#include
struct CPUTIMER_V ARS CpuTimer0; //结构CpuTimer0中包含了所有相关寄存器
struct CPUTIMER_V ARS CpuTimer1;
struct CPUTIMER_V ARS CpuTimer2;
InitCpuTimers(void) //CPU定时器初始化子程序
void
{
// Initialize address pointers to respective timer registers:
&CpuTimer0Regs;
CpuTimer0.RegsAddr
=
&CpuTimer1Regs;
=
CpuTimer1.RegsAddr
&CpuTimer2Regs;
=
CpuTimer2.RegsAddr
CpuTimer0Regs.PRD.all = 0xFFFFFFFF; // Initialize timer period to maximum
CpuTimer1Regs.PRD.all = 0xFFFFFFFF;
CpuTimer2Regs.PRD.all = 0xFFFFFFFF;
CpuTimer0Regs.TPR.all = 0;// Initialize pre-scale counter to divide by 1 (SYSCLKOUT) CpuTimer0Regs.TPRH.all = 0;
CpuTimer0Regs.TCR.bit.TSS = 1; // Make sure timers are stopped:
CpuTimer1Regs.TCR.bit.TSS = 1;
CpuTimer2Regs.TCR.bit.TSS = 1;
CpuTimer0Regs.TCR.bit.TRB = 1; // Reload all counter registers with period values:
CpuTimer1Regs.TCR.bit.TRB = 1;
CpuTimer2Regs.TCR.bit.TRB = 1;
// CpuTimer0.InterruptCount = 0; // Reset interrupt counters:
}
// 下为配置CPU定时器子程序:参数Freq为频率,单位为 "MHz",period 为周期,单位// 为微秒,配置完后定时器处于停止状态,需在主程序中开放。
void ConfigCpuTimer(struct CPUTIMER_V ARS *Timer, float Freq, float Period)
{
Uint32 temp;
// Initialize timer period:
Freq;
Timer->CPUFreqInMHz
=
Timer->PeriodInUSec = Period;
temp = (long) (Freq * Period);
Timer->RegsAddr->PRD.all = temp;
// Set pre-scale counter to divide by 1 (SYSCLKOUT):
Timer->RegsAddr->TPR.all =
0;
Timer->RegsAddr->TPRH.all = 0;
// Initialize timer control register:
Timer->RegsAddr->TCR.bit.POL = 0; // 0 = Pulse Low
Timer->RegsAddr->TCR.bit.TOG =0; // 0 = No Toggle, POL bit defines action
Timer->RegsAddr->TCR.bit.TSS = 1; // 1 = Stop timer, 0 = Start/Restart Timer
Timer->RegsAddr->TCR.bit.TRB = 1; // 1 = reload timer
Timer->RegsAddr->TCR.bit.FRCEN = 0; // Force output enable (not used)
Timer->RegsAddr->TCR.bit.PWIDTH = 7; // 7+1 = 8 SYSCLKOUT cycle pulse width
1;
Timer->RegsAddr->TCR.bit.SOFT
=
Timer->RegsAddr->TCR.bit.FREE = 1; // Timer Free Run
Timer->RegsAddr->TCR.bit.TIE = 1; // 0 = Disable/ 1 = Enable Timer Interrupt
interrupt
counter:
Reset
Timer->InterruptCount
=
0; //
}
下为主程序调用实例,其中开放了CPU定时器T0的中断。关于中断请参考后面的章节。
#include "DSP28_Device.h"
// Prototype statements for functions found within this file.
interrupt void ISRTimer0(void);
void main(void)
{
InitSysCtrl();
//系统初始化,CPU时钟频率可配置,例如设为100MHZ,参见2.4节
GPIO的初始化,可先不管InitGpio(); //
//
DINT; //禁止中断
IER = 0x0000; //
IFR = 0x0000; //清中断
//PIE寄存器初始化,后面介绍
InitPieCtrl();
//PIE矢量表初始化,后面介绍
InitPieVectTable();
InitCpuTimers(); //CPU定时器初始化
EALLOW; // 允许访问EALLOW 保护的寄存器
&ISRTimer0; //CPU定时器0的中断矢量
PieVectTable.TINT0
=
EDIS; // 重新EALLOW保护
ConfigCpuTimer(&CpuTimer0, 100, 1000000); // 配置CPU-定时器0多长时间中断一次
// 100MHz CPU频率, 1秒周期(单位微秒)
//启动CPU定时器0
0;
=
CpuTimer0Regs.TCR.bit.TSS
IER |= M_INT1; // 使能INT1(CPU-Timer 0位于INT1.7 EINT; // 开放全局中断
章末总结 知识点一圆锥曲线的定义和性质 对于圆锥曲线的有关问题,要有运用圆锥曲线定义解题的意识,“回归定义”是一种重要的解题策略;应用圆锥曲线的性质时,要注意与数形结合思想、方程思想结合起来.总之,圆锥曲线的定义、性质在解题中有重要作用,要注意灵活运用. 例1已知双曲线的焦点在x轴上,离心率为2,F1,F2为左、右焦点,P为双曲线上一点,且∠F1PF2=60°,S△PF1F2=123,求双曲线的标准方程. 知识点二直线与圆锥曲线的位置关系 直线与圆锥曲线一般有三种位置关系:相交、相切、相离. 在直线与双曲线、抛物线的位置关系中有一种情况,即直线与其交于一点和切于一点,二者在几何意义上是截然不同的,反映在代数方程上也是完全不同的,这在解题中既是一个难点也是一个十分容易被忽视的地方.圆锥曲线的切线是圆锥曲线的割线与圆锥曲线的两个交点无限靠近时的极限情况,反映在消元后的方程上,就是一元二次方程有两个相等的实数根,即判别式等于零;而与圆锥曲线有一个交点的直线,是一种特殊的情况(抛物线中与对称轴平行,双曲线中与渐近线平行),反映在消元后的方程上,该方程是一次的.
例2 如图所示,O为坐标原点,过点P(2,0)且斜率为k的直线l交抛物线y2=2x于M(x1,y1),N(x2,y2)两点. (1)求x1x2与y1y2的值; (2)求证:OM⊥ON. 知识点三轨迹问题 轨迹是解析几何的基本问题,求解的方法有以下几种: (1)直接法:建立适当的坐标系,设动点为(x,y),根据几何条件直接寻求x、y之间的关系式. (2)代入法:利用所求曲线上的动点与某一已知曲线上的动点的关系,把所求动点转换为已知动点.具体地说,就是用所求动点的坐标x、y来表示已知动点的坐标并代入已知动点满足的曲线的方程,由此即可求得所求动点坐标x、y之间的关系式. (3)定义法:如果所给几何条件正好符合圆、椭圆、双曲线、抛物线等曲线的定义,则可直接利用这些已知曲线的方程写出动点的轨迹方程. (4)参数法:当很难找到形成曲线的动点P(x,y)的坐标x,y所满足的关系式时,借助第三个变量t,建立t和x,t和y的关系式x=φ(t),y=Φ(t),再通过一些条件消掉t就间接地找到了x和y所满足的方程,从而求出动点P(x,y)所形成的曲线的普通方程. 例3设点A、B是抛物线y2=4px (p>0)上除原点O以外的两个动点,已知OA⊥OB,OM⊥AB,垂足为M,求点M的轨迹方程,并说明它表示什么曲线? 知识点四圆锥曲线中的定点、定值问题 圆锥曲线中的定点、定值问题是高考命题的一个热点,也是圆锥曲线问题中的一个难点,解决这个难点没有常规的方法,但解决这个难点的基本思想是明确的,定点、定值问题必然是在变化中所表现出来的不变的量,那么就可以用变化的量表示问题的直线方程、数量积、比例关系等,这些直线方程、数量积、比例关系不受变化的量所影响的某个点或值,就是要求的定点、定值.化解这类问题难点的关键就是引进变化的参数表示直线方程、数量积、比例关系等,根据等式的恒成立、数式变换等寻找不受参数影响的量.
物流装备与技术习题与答案 (一)判断题(正确的用√表示,错误的用×表示) 1.实践证明,先进的物流技术和先进的物流管理提高物流能力推动现代物流迅猛发展的两个车轮,二者缺一不可。(√) 2.物流理念是物流系统水平先进与否的主要标志。(×) 3.汽车起重机属于一种专用起重机。(×) 4.建筑塔式起重机属于一种通用起重机。(×) 5.非连续运输机械一般沿着规定的方向,间断地进行物料输送,如振动输送机、各式给料机、锟式输送机。(×) 6.料仓、料斗、阀门、除铁器、计量装置、料位计属于装卸搬运技术装备的附属装置。(√) 7.额定起重量Q是指起重机能吊起的物料质量,单位为kg或t。(×) 8.桥式类起重机大车运行轨道中心线之间的水平线,称为幅度R,单位为米。(×)9.运输机械可按照用途、结构形式、工作原理等分为输送机械、装卸机械和给料机械。(√) 10.应用最广的运输机械是带式运输机,对各种离角度的输送都能适应。(√) 11.连续输送机有固定式和移动式两类,使用与运输重量很大的单量物品,可以自行取货。(×) 12.对于高层货架仓库用高货位拣选式叉车比较适合,其起升高度一般可达13米。(√)13.仓储技术装备按照作业方式分为搬运机械设备、起重吊装机械、存取设备。(√)14.低层型堆垛起重机的起升高度在5米——15米之间。(×) 15.高架叉车属于一种有轨堆垛机。(×) 16.普通叉车的作业灵活性高于有轨巷道堆起重机。(√) 18.无轨巷道堆起重机的灵活性高于有轨巷道堆起重机。(√) 19.普通叉车的自动化程度高于有轨巷道堆起重机。(×) 20.按库房高度分类,高架仓库可分为高层、中层和地层三种,一种认为10米——20米较佳。(√) 21.集装箱是为便于物品运送而专门设计的,在一种或多种运输方式中无须中途换装,集装箱具有耐久性而能反复使用,设有便于搬运和装卸的装置。(√) 22.罐式集装箱是专运散料的集装箱。(×) 23.集装箱的尺寸按国际标准化组织和国际标准分类,国际标准几转向系列共分13种。(√) 24.岸边集装箱装卸具有效率高、车船作业方便、使用性强的优点,是集装箱码头前言进行集装箱船舶装卸的主要专用机械。(√) 25.物流现代化的标志是集装单元化。(√) 26.包装呆板找在流通过程中的作用分为内销产品包装、出口产品包装和特殊产品包装。(×)
(物理必修一)第二章知识点总结
点通传奇专用第二章知识点总结 2.2匀变速直线运动的速度与时间的关系 一、匀变速直线运动 1.定义:沿着一条直线,且不变的运动. 2.匀变速直线运动的v t图象是一条. 分类:(1)速度随着时间的匀变速直线运动,叫匀加速直线运动. (2)速度随着时间的匀变速直线运动,叫做匀减速直线运动. 二、速度与时间的关系式 1.速度公式: 2.对公式的理解:做匀变速直线运动的物体,由于加速度a在数值上等于速度的变化量,所以at就是t时间内;再加上运动开始时物体的,就可以得到t时刻物体的. 一、对匀变速直线运动的认识 1.匀变速直线运动的特点 (1)加速度a恒定不变; (2)v t图象是一条倾斜的直线.
2.分类 匀加速直线运动:速度随着时间均匀增大,加速度a与速度v同向. 匀减速直线运动:速度随着时间均匀减小,加速度a与速度v同向. 二、对速度公式的理解 1.公式v=v0+at中各量的物理意义 v0是开始计时时的瞬时速度,称为初速度;v是经时间t后的瞬时速度,称为末速度;at是在时间t内的速度变化量,即Δv=at. 2.公式的适用条件:做匀变速直线运动的物体 3.注意公式的矢量性 公式中的v0、v、a均为矢量,应用公式解题时,一般取v0的方向为正方向,若物体做匀加速直线运动,a取正值;若物体做匀减速直线运动,a取负值. 4.特殊情况 (1)当v0=0时,v=at,即v∝t(由静止开始的匀加速直线运动). (2)当a=0时,v=v0(匀速直线运动). 针对训练质点在直线上做匀变速直线运动,如图222所示,若在A点时的速度是5 m/s,经过3 s 到达B点时的速度是14 m/s,若再经4 s到达C点,则在C点时的速度多大? 答案26 m/s 对速度公式的理解 1.一辆以12 m/s的速度沿平直公路行驶的汽车,因发现前方有险情而紧急刹车,刹车后获得大小为4 m/s2的加速度,汽车刹车后5 s末的速度为() A.8 m/s B.14 m/s C.0 D.32 m/s 答案 C 2.火车机车原来的速度是36 km/h,在一段下坡路上加速度为0.2 m/s2.机车行驶到下坡末端,速度增加到54 km/h.求机车通过这段下坡路所用的时间. 答案25 s 12.卡车原来以10 m/s的速度在平直公路上匀速行驶,因为路口出现红灯,司机从较远的地方立即开始刹车,使卡车匀减速前进.当车减速到2 m/s时,交通灯恰好转为绿灯,司机当即放开刹车,并且只用了减速过程一半的时间卡车就加速到原来的速度.从刹车开始到恢复原速的过程用了12 s.求: (1)卡车在减速与加速过程中的加速度; (2)开始刹车后2 s末及10 s末的瞬时速度. 12、(1)-1 m/s2 2 m/s2(2)8 m/s 6 m/s 2.3匀变速直线运动的位移与时间的关系 一、匀速直线运动的位移 做匀速直线运动的物体在时间t内的位移x=v t,在速度图象中,位移在数值上等于v t图象与对应的时间轴所围的矩形面积. 二、匀变速直线运动的位移 1.由v t图象求位移: (1)物体运动的速度时间图象如图232甲所示,把物体的运动分成几个小段,如图乙,每段位移≈每段起始时刻速度×每段时间=对应矩形面积.所以整个过程的位移≈各个小矩形.
《现代物流装备与技术实务》复习题库参考答案 一、单选题 1-10 DBDAB DADDD 11-20 DBACD ABBCC 21-30 CDACB BBDCA 31-40 BBDAA DABCA 41-50 CABDC DACCB 51-60 CCCDD CABBA 二、多项选择 1-5 ABCD ABC ABC ABD ABCD 6-10 ABCD ABCD AB CD ABC 11-15ABCD ABC BCD AC ABCD 16-20ABCD BCD ABC ABCD ABD 21-25 ABCD AD ABCD ABCD ABCD 26-30 ABCD AD CD ABC ABC 31-35 ABCD ABCD ABCD ABC ABCD 36-40 ABCD ABC ABCD AB BD 三、判断题 (对)1、公共仓储是公用事业的配套服务设施,专门为车站、码头等提供仓 储服务。 (错)2、仓库按照功能不同可以划分为通用仓库、专用仓库以及特种仓库。(错)3、自动化立体仓库出入库作业调度时要遵循入库任务优先执行原则。(对)4、货位分配时要坚持为取而存原则。 (错)5、集装箱至少应具有10立方米及以上的容积。 (对)6、仓储管理时必须根据货物的尺寸、货量、特性、保管要求来选择合 适的货位。 (对)7、合同没有约定时,货物的入库检验一般应该在入库的10天之内进行。(错)8、货物存放时,跺码、存放的货物的正面应该尽可能地背向通道,以 免货物碰坏。 (错)9、入库业务包括清点货物件数、查验货物单重、货物分拣、剔除残损、 办理交接等。 (错)10、催提是直接向已知的提货人发出提货通知,它只能用信件正式通知。
第一课:工具的使用 一、Photoshop 简介: Adobe 公司出品的Photoshop 是目前最广泛的图像处理软件,常用于广告、艺术、平面设计等创作。也广泛用于网页设计和三维效果图的后期处理,对于业余图像爱好者,也可将自己的照片扫描到计算机,做出精美的效果。总之,Photoshop 是一个功能强大、用途广泛的软件,总能做出惊心动魄的作品。 二、认识工具栏 1、 选框工具:用于选取需要的区域 ----选择一个像素的横向区域 ----选择一个像素的竖向区域
属性栏: 注:按shift 键+ 框选,可画出正方形或正圆形区域 2、 移动工具 : -----用于移动图层或选区里的图像 3、套索工具: ----用于套索出选区 ----用于套索出多边形选区 ----可根据颜色的区别而自动产生套索选区 4、魔术棒工具: ----根据颜色相似原理,选择颜色相近的区域。 注:“容差”,定义可抹除的颜色范围,高容差会抹除范围更广的像素。 5、修复工具: 且是 ----类似于“仿制图工具”,但有智能修复功能。 ----用于大面积的修复 一新 ----用采样点的颜色替换原图像的颜色 注:Alt+鼠标单击,可拾取采样点。 6、仿制图章工具----仿制图章工具从图像中取样,然后您可将样本应用到其它图像或同一图像的其它部分。 ----仿制图章工具从图像中取样,然后将样本应用到其它图像或同 一图像的其它部分(按Alt键,拾取采样点)。 ----可先自定义一个图案,然后把图案复制到图像的其它区域或其它图像上。
三、小技巧: ①、取消选区:【Ctrl +D 】 ②、反选选区:【Shif+F7】 ③、复位调板:窗口—工作区—复位调板位置。 ④、ctrl+[+、-]=图像的缩放 ⑤空格键:抓手工具 ⑥Atl+Delete = 用前景色填充 Ctrl+Delete = 用背景色填充 第二课:工具的使用二 一、工具栏 自由变换工具:【 Ctrl +T 】 2、使用框选工具的时候,按【Shift 】后再框选,则框选出正圆或正方形。 按【Alt 】后再框选,则选区以鼠标点为中心
《现代物流装备与技术实务》平时作业答案(4次) 一、单项选择题(共20分,每题2分) 1、货站、车站,转运站、终点站,港口、码头等,应该属于( C )。 A、物流载体 B、流通性节点 C、转运性节点 D、储存性节点 2、( A )具有公共设施性质,是宏观物流的基础。 A、物流基础性设施 B、物流功能性设施 C、物流技术装备 D、物流系统中的载体 3、目前世界上第一台自动引导车是由( A )开发成功的。 A、美国 B、英国 C、中国 D、日本 4、以下那种不属于包装的形式( D )。 A、充填 B、封口 C、捆扎 D、分拣 5、在经济合理区域范围内,根据用户要求,对物品进行拣选、加工、分割、包装组配等作业,并按时送达指定地点的物流活动。称为( B )。 A、流通加工 B、配送 C、包装 D、运输 6、最业高度大于12米的堆垛起重机是( A ) A、有轨巷道式堆垛起重机 B、有轨巷道式堆垛起重机 C、普通叉车 D、双立柱堆垛机 7、通用货架与专用货架的划分标准是( C )。 A、封闭程度 B、制造材料 C、适用性 D、结构特点 8、24小时塔的推出较好地解决了( B )问题,提高了配送效率,降低了配送成本。 A、B2C B、门到门 C、AS/RS D、BtoB 9、装卸堆垛机器人作业不具有的特点( A )。 A、专业性 B、生产柔性 C、自动性 D、准确性 10、冷藏仓库的温度一般控制在( A )之间。 A、0~50C B、-20~50C C、-10~100C D、-35~20C 11、下列属于散装货物装卸机械的是( C )。 A、轨行式起重机 B、自行式起重机 C、抓斗起重机 D、带式输运机 12、将起重机划分为轻小型起重设备、桥式类起重机和臂架类起重机的标准是(C )。 A、用途 B、使用场合 C、结构性能 D、特殊条件 13、起重速度可达70米/分的起重机械是( C )。
第二章 单元复习 一、知识点回顾: 1、电源、电源电动势; 1、闭合电路的欧姆定律; 2、闭合电路欧姆定律的应用; 3、电池组; 4、电阻的测量。 二、基本知识点: (一)、电源、电源电动势: 1、电源的概念: (1)电源是把其它形式的能转化为电能的一种装置。 (2)电源供电原理:在电源部非静电力做功,其它形式的能转化为电能,在电源的外部电路,电场力做功,电能转化为其它形式的能。 2、电源的电动势: (1)电源电动势大小等于没有接入电路时两极之间的电压,(电源电动势的大小可用阻极大的伏特表粗略测出) (2)电动势的符号:E ,国际单位是伏特(符号为V );是一个标量,但有方向,在电源部由负极指向正极。 (3)电动势的物理意义:表征电源把其它形式的能转化为电能的本领,电动势是由电源本身的性质决定的,电动势在数值上等于在把其它形式的能转化为电能的时,1C 电量所具有的电能的数值。 3、电压和外电压: (1)闭合电路的组成:电路:电源部的电路其电阻称为电阻,电阻所降落的电压称为电压; (2)外电路:电源外部的电路,其两端电压称为外电压或路端电压。 (3)、外电压的关系:E = U + U' 。 (4)注意:在电路闭合时U < E ; (二)、闭合电路的欧姆定律: 1、闭合电路的欧姆定律的容: (1)闭合电路里的电流,跟电源的电动势成正比,跟整个电路的电阻成反比。 公式:I = r R E ;
(2)从闭合电路欧姆定律中,还可导出电路功率的表达式: EI = U I + U'I = I 2R + I 2r 。 (3)、定律的适用条件:外电路为纯电阻电路。 2、闭合电路欧姆定律的应用: 路端电压变化的讨论: (1)当R 增大时,I 减小,U'=I r 减小,U 增大;当R 时,I = 0 ,U =E (最大); R 0 时 ,I = r E ,U = 0 ; (2)当R 减小时,U 减小,当3、闭合电路欧姆定律的应用(二) 应用闭合电路的欧姆定律分析电路中有关电压、电流、电功率的方法; (1)分析电路中的电压、电流、电阻时,一般先由闭合电路欧姆定律确定电路的总电流、路端电压,再结合部分电路的欧姆定律分析各部分电路的参数。 (2)分析电源的电动势、电阻时,可将(1)中的分析顺序逆进行。 (3)分析电路的功率(或能量)时可用公式EI = U I + U'I = I 2R + I 2r 其中EI 为电源的总功率(或消耗功率),U I= I 2R 为电源的输出功率(或外电路的消耗功率);U'I= I 2 r 为电源部损耗功率,要注意区分。 (三)电池组: 1、串联电池组: (1)连接方法:前一个电池的负极与后一个电池的正极相连依次连接而成。 (2)串联电池组的特点: 电动势E = E 1 + E 2+E 3+………; 电阻:r = r 1 + r 2+r 3 ………..; 当用相同电池串联时:E 串= nE ;r 串 = nr ; (3)注意:串联电池组允许通过的电流跟单个电池相同;串联时,不要部分电池接反;不要新旧电池混合串联。 (四)电阻的测量: 1、伏安法测电阻: (1)原理和方法:利用电压表和电流表测出电阻两端的电压U 和通过的电流I ,用欧
一、单项选择题(共20 道小题,共100.0 分) 1. 物流是()的流动储存活动。 A. 无形物品 B. 有形物品 C. 信息 D. 资金 知识点: 第一章物流管理信息系统概述 学生答 [B;] 案: 得分: [5] 试题分值: 5.0 提示: 2. 3. 运输管理信息系统是通过建立计算机网络和系统,实现对()的追踪 管理。 A. 车辆及所运货物 B. 人员 C. 仓库 D. 客户信息 知识点: 第一章物流管理信息系统概述 学生答 [A;] 案: 得分: [5] 试题分值: 5.0 提示: 4. 5. 下面关于物流信息的叙述不正确的是()。 A. 物流信息与运输、仓储等环节都有密切的关系,它在物流活动中起 着神经系统的作用。 B. 物流信息不能自动采集。 C. 物流信息按信息加工程度可分为原始信息和加工信息。 D. 在不同物流管理子系统中物流信息是不同的。 知识点: 第一章物流管理信息系统概述 学生答 [B;] 案: 得分: [5] 试题分值: 5.0 提示:
6. 7. 物流管理信息系统相关人员不包括()。 A. 物流系统开发人员 B. 物流管理人员 C. 企业高层领导 D. 人事管理人员 知识点: 第一章物流管理信息系统概述 学生答 [D;] 案: 得分: [5] 试题分值: 5.0 提示: 8. 9. 下面关于物流管理信息系统的叙述不正确的是()。 A. 物流信息系统工作内容非常复杂。 B. 物流管理信息系统常分为供应流子系统、产品物流子系统、库存和 运输物流子系统、销售物流子系统等。 C. 物流管理信息系统仅由软件构成。 D. 物流管理信息系统可以改善企业内部和企业间交流信息的方式,提 高办公自动化水平。 知识点: 第一章物流管理信息系统概述 学生答 [C;] 案: 得分: [5] 试题分值: 5.0 提示: 10. 11. 物流管理信息系统的构成不包括()。 A. 硬件 B. 软件 C. 车辆 D. 人员和制度 知识点: 第一章物流管理信息系统概述 学生答 [C;] 案: 得分: [5] 试题分值: 5.0 提示: 12.
第二章整式的加减 整式的概念: 单项式与多项式统称整式。(分母含有字母的代数式不是整式) 一、单项式:都是数或字母的积的式子叫做单项式。 1.单项式的系数:单项式中的数字因数。 2.单项式的次数:一个单项式中所有字母的指数的和。 注意 ①圆周率π是常数; ②只含有字母因式的单项式的系数是1或-1,“1”通常省略不写。 例:x2,-a2b等; ③单项式次数只与字母指数有关。例:23πa6的次数为。 ④单项式的系数是带分数时,应化成假分数。 ⑤单项式的系数包括它前面的符号。例:系数是。 ⑥单独的一个数字是单项式,它的系数是它本身;非零常数的次数是0。 考点: 1.在代数式:,3,,,,0中,单项式的个数有() A. 1个 B.2个 C.3个 D.4个 2.单项式-的系数与次数分别是() A. -2, 6 B.2, 7 C., 6 D., 7 3.的系数是_____________.
4.判断下列式子是否是单项式,是的√,不是的打X ; a ;;;;;; 0 ; ;;;;; 5.写出下列单项式的系数和次数 的系数是______,次数是______; 的系数是______,次数是______; a2bc3的系数是_____,次数是_____; 的系数是_____,次数是_____; 的系数是______,次数是______; 的系数是_____,次数是_____; 53x2y的系数是_____,次数是______; 6.如果是一个关于x的3次单项式,则b=_______;若是一个4次 单项式,则m=_____;已知是一个6次单项式,求的值。 7.写出一个三次单项式__________,它的系数是_______;写一个系数为3,含有两个字母a,b的四次单项式_______。 知识点回顾 1.单项式的定义:_________________________________叫做单项式。 2.单项式的系数:_________________________________叫做单项式的系数。 3.单项式的次数:_________________________________叫做单项式的次数
第一章:物流信息技术概述 一信息的特征 答:客观性、传递性、时效性、价值性、不对称性、共享性。 二物流信息的分类 答:(一)按物流来源分为:物流系统内信息和物流系统外信息。 (二)按物流功能分为:计划信息、控制及作业信息、统计信息和支持信息等。 (三)按管理层划分为:操作管理信息、知识管理信息、战术管理信息、战略管理信息。 (四)按物流活动领域分为:运输信息、仓储信息、装卸信息等。 (五)按信息稳定程度分为:静态信息、动态信息。 三物流信息的作用 答:1:物流信息有助于物流活动各个环节之间的联系。 2:物流信息有助于物流活动各个环节之间的协调与控制。 3:物流信息有助于提高物流企业科学管理和决策水平。 物流管理中存在以下基本决策问题: 答:位置决策、生产决策、库存决策、采购决策、运输配送决策。 四“四流”的相互关系 答:商流是物流、资金流和信息流的起点,也是物流、资金流和信息流的前提。 五物流信息技术的概念: 答:物流信息技术是指运用于物流领域的信息技术。它是建立在计算机、网络通信平台上的各种技术应用,包括硬件技术和软件技术,如计算机技术通信网络技术、全球卫星定位技术、地理信息技术、条码技术、射频技术,以及在这些技术手段支撑下的数据库技术,面向行业的管理信息系统和软件技术。
六物流信息系统的类型 答:1:按物流作业流程分类分为:进货管理系统、销售管理系统、库存管理系统。 2:按物流环节分类分为:仓库管理系统、出货作业系统、配送管理系统、运输管理系统。 3:按系统功能性质分类分为:操作型系统、决策型系统。 4:按系统配置分类分为:单机系统、计算机网络系统。 七物流信息系统的基本功能 答:信息处理功能、事务处理功能、预测功能、计划功能、控制功能、辅助决策和决策优化功能。 八物流信息化的内容 答:1:物流信息网络化 2:物流过程信息化 3:物流管理信息化 4:经营网络化 5:设施自动化 第二章条码技术 一条码的分类 答:1:按维数分类分为一维条码和二维条码。一维条码进可分为商品条码和物流条码。二维条码进可分为:行排式二维条码、矩阵式二维条码、邮政编码。 2:按码制分类分为:UPC码、EAN-13码、EAN-8码、ITF-14、ITF-16、EAN/UCC-128码、39码、库德巴码。 二国际上公认的物流领域的条码与标准
第一课:工具的使用 、 Photoshop 简介: Adobe 公司出品的 Photoshop 是目前最广泛的图像处理软件,常用于广告、艺术、平面 设计等创作。也广泛用于网页设计和三维效果图的后期处理,对于业余图像爱好者,也 可将自己的照片扫描到计算机,做出精美的效果。总之, Photoshop 是一个功能强大、 用途广泛的软件,总能做出惊心动魄的作品。 、认识工具栏 1、 选框工具 :用于选取需要的区域 选择一个像素的横向区域 选择一个像素的竖向区域
注:按 shift 键 +框选,可画出正方形或正圆形区域 可根据颜色的区别而自动产生套索选区 根据颜色相似原理,选择颜色相近的区域。 5、 修复工具 : 类似于“仿制图工具” ,但有智能修复功能。 用于大面积的修复 用采样点的颜色替换原图像的颜色 注: Alt+ 鼠标单击,可拾取采样点。 6、仿制图章工具 仿制图章工具从图像中取样, 然后您可将样本应用到其它图像或同一 图像的其它部分。 - 仿制图章工具从图像中取样,然后将样本应用到其它图像或同 一图像的其它部分(按 Alt 键,拾取采样点) 。 区域或其 它图像上。 2、 移动工具 : 3、 套索工具 : 用于移动图层或选区里的图像 - - 用于套索出选区 用于套索出多边形选 区 属性栏: 选区相交 单个选区 选区相加 选区相减 4、魔术棒工具 ,定义可抹除的颜色范围,高容差会抹除范围更广的像素。 且是 --------- -
三、小技巧: ①、取消选 区: 【Ctrl +D】 ②、反选选 区: 【Shif+F7 】 ③、 复位调 板: 窗口—工作区—复位调板位置。 ④、 ctrl+[+ 、 -]= 图像的缩放 ⑤空格键:抓手工具 ⑥ Atl+Delete = 用前景色填充 Ctrl+Delete = 用背景色填充 第二课:工具的使用二 模1、糊自工由具变换工具:【Ctrl +T】减淡工具 模糊工具 2、使用框选工具的时候,按【Shift 】后再框选,则框选出正圆或正方形。
第一课:工具的使用 一、Photoshop 简介: Adobe 公司出品的Photoshop 是目前最广泛的图像处理软件,常用于广告、艺术、平面设计等创作。也广泛用于网页设计和三维效果图的后期处理,对于业余图像爱好者,也可将自己的照片扫描到计算机,做出精美的效果。总之,Photoshop 是一个功能强大、用途广泛的软件,总能做出惊心动魄的作品。 二、认识工具栏 1、 选框工具:用于选取需要的区域 ----选择一个像素的横向区域 套索工具 移动工具 魔术棒工具 修复工具 仿制图章工具 选框工具 裁剪工具
----选择一个像素的竖向区域 属性栏: 注:按shift 键+框选,可画出正方形或正圆形区域 2、移动工具: -----用于移动图层或选区里的图像 3、套索工具: ----用于套索出选区 ----用于套索出多边形选区 ----可根据颜色的区别而自动产生套索选区 4、魔术棒工具: ----根据颜色相似原理,选择颜色相近的区域。 注:“容差”,定义可抹除的颜色范围,高容差会抹除范围更广的像素。 5、修复工具: 且是 ----类似于“仿制图工具”,但有智能修复功能。 ----用于大面积的修复 一新 ----用采样点的颜色替换原图像的颜色 注:Alt+鼠标单击,可拾取采样点。 6、仿制图章工具 ----仿制图章工具从图像中取样,然后您可将样本应用到其它图像或同一图像的其它部分。 ----仿制图章工具从图像中取样,然后将样本应用到其它图像或同 一图像的其它部分(按Alt 键,拾取采样点)。 单个选区 选区相加 选区相减 选区相交
----可先自定义一个图案,然后把图案复制到图像的其它区域或其它图像上。 三、小技巧: ①、取消选区:【Ctrl +D 】 ②、反选选区:【Shif+F7】 ③、复位调板:窗口—工作区—复位调板位置。 ④、ctrl+[+、-]=图像的缩放 ⑤空格键:抓手工具 ⑥Atl+Delete = 用前景色填充 Ctrl+Delete = 用背景色填充 第二课:工具的使用二 一、工具栏 二、小技巧 1、自由变换工具:【Ctrl +T 】 2、使用框选工具的时候,按【Shift 】后再框选,则框选出正圆或正方形。 画笔工具 历史记录画笔工具 渐变 / 油漆桶 工具 橡皮擦工具 模糊工具 减淡工具
物流信息技术各章习题及答案(一) 第一章 一、单项选择题 1、主要用于企业内部以及企业供应链上下游之间的信息共享的物流信息平台是:( A ) A企业物流信息平台 B国家物流公共信息平台 C地区物流公共信息平台 D行业物流公共信息平台 2、( A )对方案实施的结果已知,在一定条件下必然出现某个结果,在对影响因素充分掌握的基础上做出决策。 A确定型决策 B不确定型决策 C风险型决策 D错误型决策 3、根据管理层次的划分,物流信息分为( A )、战术管理信息、知识管理信息、操作管理信息。 A战略型管理信息 B外部信息C静态信息D动态信 息 二、名词解释 1、物流信息:是物流活动中各个环节生成的信息,一般是随着从生产到消费的物流活动产生,与物流过程中的运输、储存、装卸、包装等各种职能有机结合在一起。 2、物流信息技术:是指运用于物流各环节中的信息技术,包括:计算机技术、网络技术、分类编码技术、条码技术、射频识别技术、电子数据交换技术,地理信息技术和全球定位系统。
三、填空题 1、一般信息系统都具有输入、(输出)存储、加工和(传输)等功能。 信息系统功能:收集数据、传输数据、处理数据、储存数据、输出数据和人机交互。 2、信息系统的基本组成是(信息源)、信息接收者、(信息处理器)、信息管理器、信息传输通道。 四、论述题 1、说明信息与决策的关系。 答:关系表现为:信息经分析、处理形成决策,决策执行的结果又成为新的信息,如此循环。 确定型决策是对方案实施结果已知,在一定条件下必然出现的结果。 不确定型决策是对方案实施的结果未知,对方案实施的因素与结果之间缺乏认识。 风险型决策是对方案实施的结果未知,但了解由于某一因素的影响而出现某一结果的概率。 2、说明物流信息的特点、作用和分类。 答:物流信息的特点是:1)信息量大,分布广,种类多;2)动态性强、实施性高,时效性强,对建设性和灵活性提出很高要求;3)信息趋于标准化。 3、说明我国物流信息化的现状及趋势。
Photoshop基本操作介绍(图文介绍)
————————————————————————————————作者:————————————————————————————————日期:
第一课:工具的使用 一、Photoshop简介: Adobe公司出品的Photoshop是目前最广泛的图像处理软件,常用于广告、艺术、平面设计等创作。也广泛用于网页设计和三维效果图的后期处理,对于业余图像爱好者,也可将自己的照片扫描到计算机,做出精美的效果。总之,Photoshop是一个功能强大、 用途广泛的软件,总能做出惊心动魄的作品。 二、认识工具栏 1、选框工具:用于选取需要的区域 ----选择一个像素的横向区域 套索工具 移动工具 魔术棒工具 修复工具 仿制图章工具 选框工具 裁剪工具
----选择一个像素的竖向区域 属性栏: 注:按shift 键+框选,可画出正方形或正圆形区域 2、移动工具: -----用于移动图层或选区里的图像 3、套索工具: ----用于套索出选区 ----用于套索出多边形选区 ----可根据颜色的区别而自动产生套索选区 4、魔术棒工具: ----根据颜色相似原理,选择颜色相近的区域。 注:“容差”,定义可抹除的颜色范围,高容差会抹除范围更广的像素。 5、修复工具: 且是 ----类似于“仿制图工具”,但有智能修复功能。 ----用于大面积的修复 一新 ----用采样点的颜色替换原图像的颜色 注:Alt+鼠标单击,可拾取采样点。 6、仿制图章工具 ----仿制图章工具从图像中取样,然后您可将样本应用到其它图像或同一图像的其它部分。 ----仿制图章工具从图像中取样,然后将样本应用到其它图像或同 一图像的其它部分(按Alt 键,拾取采样点)。 单个选区 选区相加 选区相减 选区相交
物流设施与设备第二章 一.填空题 1.公路运输的主要特点:机动灵活,投资少,受自然条件限制少 , 能取货到家, 作为铁路、水运、空运的集散运输 2. 公路五个等级:高速公路、一级、二级、三级、四级 3. 公路行政级别:国道,省道,县道,乡道,专用公路 4. 货运站四种货运形式:整车货运,快速货运,零担货运,集装箱货运 5. 按运输组织方法分类:分为零担货物运输、整批货物运输、集装箱运输 6.高速公路的特点:车速高,运输效率高、通行能力大,车流量和运输量大、行车安全,交通事故率低、运输成本低 7.集装箱运输的特点:简化装卸作业过程,节省包装材料,减少货差货损,降低运输成本 8.影响飞机最大平飞速度的主要因素:发动机的推力、飞机的阻力9.航空运输的特点:快速性,机动性大,舒适、安全,基本建设周期短、投资少, 10. 车辆制动性能的评价指标:制动效能,制动效能的恒定性,制动时的方向稳定性 二.选择题 1.下面关于公路运输主要特点的论述中,错误的是( D) A、机动灵活,适应性强 B、可实现“门到门”直达运输 C、在中、短
途运输中,运送速度较快. D、运量较大,运输成本较低 2.VIN代表车辆的什么代码(B) A 车辆特征代码 B 车辆识别代码 C 世界制造厂商识别代码 D 车辆指示代码 3.(B)又称集装箱堆场,是指贮存和保管空、重箱的场地,是码头堆场中除前方堆场以外的部分。 A集装箱码头 B 后方堆场 C 集装箱 D 集装箱船泊 4. 我国铁路的标准轨距应为(C)。 A 1235mm B 1335mm C. 1435mm D 1535mm 5.(C)运输特别适合于运输长距离高价值的产品 A铁路B公路C航空D集装箱 6.集装箱的搬运和储存作业中,(C)是收费最主要的部分 A 出入库 B 库内移动 C 储存周期 D 遮盖 7. 主要用于装载一般包装、袋装、箱装和桶装的件杂货物的船舶称 ( A ) A.杂货船 B.散货船 C.滚装船 D.载驳船 8.集装箱减少了( B )作业。 A.运输 B.装卸和搬运 C.包装 D.储存 9.机车是铁路运输的基本动力,从原动力来看,机车可分为蒸汽机车、( A )和内燃机车。 A.电力机车 B.电瓶机车 C.柴油机车 D.柴电机车 10.一个20ft的实物集装箱等于( B )TEU。
章末总结 教材P14活动 1.这些说法是不全面的。它们忽视了旅游资源的内涵的某些方面。“旅游者参观游览的地方”所讲的范畴过大,而“自然风光加上文化古迹”既忽视了对旅游者的吸引力这一限制条件,又忽略了风土民情等一些文化现象。“凡能达到娱乐目的的一切自然资源和文化资源”则只强调了旅游的娱乐性,而忽视了购物、学习、疗养等旅游活动的存在。 2.如下表所示: 自然界、人类社会中的事物和因素是否旅 游资源 判断理由 可开展的旅游 活动 海市蜃楼是一种能吸引旅游者,并能被旅游业开发, 带来经济效益和社会效益的自然现象 观光旅游 自然灾害遗迹是能吸引有关科学人员前来考察,并能给当 地旅游业带来经济效益和社会效益 科学考察 古民居是能吸引旅游者,使之受到教育,并具有历 史文化价值,给旅游业带来经济效益和社 会效益 建筑文化旅游 龙舟竞渡是是具有地方特色的风土民俗,能吸引旅游 者,并给旅游业带来经济效益和社会效益 观光旅游 神话传说是对神话传说的向往吸引着旅游者,从而给 旅游业带来经济效益和社会效益 文化、观光旅 游 重要的体育盛会是吸引体育爱好者,并给当地旅游业带来经观看体育比赛
教材P16活动 1.本活动为一开放性题目,要完成该题目,一方面要了解当地有哪些旅游资源,另一方面要明确自然旅游资源与人文旅游资源是如何划分的,二者有什么区别。 2.区别:自然旅游资源是天然形成的自然事物和现象。自然旅游资源的形成历史,往往可以追溯到地质历史时期,以千百万年计算,一经形成,相对比较稳定,变化比较缓慢。自然旅游资源的体积一般较大,往往以构景地貌(如花岗岩构景地貌、喀斯特构景地貌、丹霞构景地貌等)作为构架,一般分布在野外。自然旅游资源的开发利用功能主要集中在观光、生态、探险、度假、体育等旅游领域。 人文旅游资源是人类创造的人文事物和现象。人文旅游资源的形成历史相对自然旅游资源较短,容易发生变化,也容易遭受天灾人祸的破坏,因此应重视濒危人文旅游资源的抢救和保护。人文旅游资源体积一般较小,要延长游客滞留时间比较困难,多集中在城市和其他居民点。人文旅游资源的开发利用主要集中在游览、生态、探秘、修学、休闲、度假、商务、会展等旅游领域。 教材P18思考 无论是自然界还是人类社会,事物和现象不但千差万别,且随着时间而千变万化,其中能吸引旅游者的事物和现象也极其丰富多彩,这就导致旅游资源的多样性。 旅游资源多样性的另一个原因是旅游者的旅游需求越来越广泛,原先不是旅游资源的事物和现象逐渐变成旅游资源。 教材P19思考 旅游资源不能随心所欲地创造。旅游资源具有非凡性特征,只有那些在同类中具有超凡脱俗特点的地理事物和现象才能吸引旅游者。如果盲目地重复兴建题材相同或相近的人文景观,失去了旅游资源的非凡性,会造成游人稀少、资金浪费的现象。因此,在创造旅游资源时,必须考虑使所创造的旅游资源具有非凡性,避免兴建与邻近地区题材相同或相近的人文景观。 教材P25活动 武夷山景区
物流装备与技术习题与答案(一)判断题(正确的用√表示,错误的用×表示) 1.实践证明,先进的物流技术和先进的物流管理提高物流能力推动现代物流迅猛发展的两个车轮, 者缺一不可。(√) 二2.物流理念是物流系统水平先进与否的主要标志。(×) 3.汽车起重机属于一种专用起重机。(×) 4.建筑塔式起重机属于一种通用起重机。(×) 5.非连续运输机械一般沿着规定的方向,间断地进行物料输送,如振动输送机、各式给料机、锟式 输送机。( ×) 6.料仓、料斗、阀门、除铁器、计量装置、料位计属于装卸搬运技术装备的附属装置。(√) 7.额定起重量Q 是指起重机能吊起的物料质量,单位为kg或t。(×) 8.桥式类起重机大车运行轨道中心线之间的水平线,称为幅度R,单位为米。(×) 9.运输机械可按照用途、结构形式、工作原理等分为输送机械、装卸机械和给料机械。(√)10.应用最广的运输机械是带式运输机,对各种离角度的输送都能适应。(√) 11.连续输送机有固定式和移动式两类,使用与运输重量很大的单量物品,可以自行取货。(×)12.对于高层货架仓库用高货位拣选式叉车比较适合,其起升高度一般可达13 米。(√) 13.仓储技术装备按照作业方式分为搬运机械设备、起重吊装机械、存取设备。(√) 14.低层型堆垛起重机的起升高度在 5 米—— 15 米之间。( ×) 15.高架叉车属于一种有轨堆垛机。(×) 16.普通叉车的作业灵活性高于有轨巷道堆起重机。(√)18.无轨巷道堆起重机的灵活性高于有轨巷道堆起重机。(√) 19.普通叉车的自动化程度高于有轨巷道堆起重机。(×) 20.按库房高度分类,高架仓库可分为高层、中层和地层三种,一种认为10 米—— 20 米较佳。(√) 21.集装箱是为便于物品运送而专门设计的,在一种或多种运输方式中无须中途换装,集装箱具有耐 久性而能反复使用,设有便于搬运和装卸的装置。(√) 22.罐式集装箱是专运散料的集装箱。(×) 23.集装箱的尺寸按国际标准化组织和国际标准分类,国际标准几转向系列共分13 种。(√) 24.岸边集装箱装卸具有效率高、车船作业方便、使用性强的优点,是集装箱码头前言进行集装箱船 舶装卸的主要专用机械。(√) 25.物流现代化的标志是集装单元化。(√) 26.包装呆板找在流通过程中的作用分为内销产品包装、出口产品包装和特殊产品包装。(×)27.我国联运托盘大多采用平托盘,以便于叉车、货架、仓库的标准化。(√) 28.平托盘的主要特点是防护能力强,可有效防止塌垛,防止货损。(×) (二)单选题 1.下列哪种情形下不体现物流技术装备配置的合理性原则( D )。 A.在机械化的过程中考虑系统目标和实际情况
第二章 单元复习 一、知识点回顾: 1、电源、电源电动势; 1、闭合电路的欧姆定律; 2、闭合电路欧姆定律的应用; 3、电池组; 4、电阻的测量。 二、基本知识点: (一)、电源、电源电动势: 1、电源的概念: (1)电源是把其它形式的能转化为电能的一种装置。 (2)电源供电原理:在电源内部非静电力做功,其它形式的能转化为电能,在电源的外部电路,电场力做功,电能转化为其它形式的能。 2、电源的电动势: (1)电源电动势大小等于没有接入电路时两极之间的电压,(电源电动势的大小可用内阻极大的伏特表粗略测出) (2)电动势的符号:E ,国际单位是伏特(符号为V );是一个标量,但有方向,在电源内部由负极指向正极。 (3)电动势的物理意义:表征电源把其它形式的能转化为电能的本领,电动势是由电源本身的性质决定的,电动势在数值上等于在把其它形式的能转化为电能的时,1C 电量所具有的电能的数值。 3、内电压和外电压: (1)闭合电路的组成:内电路:电源内部的电路其电阻称为内电阻,内电阻所降落的电压称为内电压; (2)外电路:电源外部的电路,其两端电压称为外电压或路端电压。 (3)内、外电压的关系:E = U + U' 。 (4)注意:在电路闭合时U < E ; (二)、闭合电路的欧姆定律: 1、闭合电路的欧姆定律的内容: (1)闭合电路里的电流,跟电源的电动势成正比,跟整个电路的电阻成反比。 公式:I = r R E ;
(2)从闭合电路欧姆定律中,还可导出电路功率的表达式: EI = U I + U'I = I 2R + I 2r 。 (3)、定律的适用条件:外电路为纯电阻电路。 2、闭合电路欧姆定律的应用: 路端电压变化的讨论: (1)当R 增大时,I 减小,U'=I r 减小,U 增大;当 R 时,I = 0 ,U =E (最大); R 0 时 ,I = r E ,U = 0 ; (2)当R 减小时,U 减小,当 3、闭合电路欧姆定律的应用(二) 应用闭合电路的欧姆定律分析电路中有关电压、电流、电功率的方法; (1)分析电路中的电压、电流、电阻时,一般先由闭合电路欧姆定律确定电路的总电流、路端电压,再结合部分电路的欧姆定律分析各部分电路的参数。 (2)分析电源的电动势、内电阻时,可将(1)中的分析顺序逆进行。 (3)分析电路的功率(或能量)时可用公式EI = U I + U'I = I 2R + I 2r 其中EI 为电源的总功率(或消耗功率),U I= I 2R 为电源的输出功率(或外电路的消耗功率);U'I= I 2r 为电源内部损耗功率,要注意区分。 (三)电池组: 1、串联电池组: (1)连接方法:前一个电池的负极与后一个电池的正极相连依次连接而成。 (2)串联电池组的特点: 电动势E = E 1 + E 2+E 3+………; 内电阻:r = r 1 + r 2+r 3 ………..; 当用相同电池串联时:E 串= nE ;r 串 = nr ; (3)注意:串联电池组允许通过的电流跟单个电池相同;串联时,不要部分电池接反;不要新旧电池混合串联。 (四)电阻的测量: 1、伏安法测电阻: (1)原理和方法:利用电压表和电流表测出电阻两端的电压U 和通过的电流I ,用欧姆定律R = U / I 算出电阻。