
220IEEE TRANSACTIONS ON AUTOMATION SCIENCE AND ENGINEERING,VOL.6,NO.2,APRIL2009 Dynamics Modeling and Analysis of a Swimming Microrobot for Controlled Drug Delivery Huaming Li,Student Member,IEEE,Jindong Tan,Member,IEEE,and Mingjun Zhang,Senior Member,IEEE
Abstract—Dynamics modeling and analysis of a tiny swimming robot,which is composed of a helix type head and an elastic tail,is presented in this paper.The microrobot is designed for controlled drug delivery.It is at the micrometer scale and suitable for a swim-ming environment under low Reynolds number(Re).The head of the swimming robot is driven by an external rotating magnetic ?eld,which enables it to be operated wirelessly.The spiral-type head accommodates communication and control units and serves as the base for the elastic tail.When a rotating magnetic?eld is applied,the head rotates synchronously with the?eld,generating and propagating driving torque to the straight elastic tail.When the driving torque reaches a threshold,dramatic deformation takes place on the elastic tail.The tail then transforms into a helix and generates propulsive thrust.The entire tail also serves as a drug reservoir.This paper focuses on analyzing the dynamics of the mi-crorobot using resistive force theory(RFT),and comparing the propulsion performance with other rigid-body microrobots. Note to Practitioners—In this paper,we present a swimming mi-crorobot which is designed to be small enough to be injected into a human body to perform controlled drug delivery.In order to safely inject microrobot into human bodies,the diameter of the microrobot needs to be or smaller than0.8mm,which makes the Reynolds number(i.e.,the ratio of inertial force to viscous force) very low.In such a low Re environment,traditional propulsive methods,such as?sh-like actuators,scallops and rigid oars which depend on reciprocal motions,cannot work ef?ciently or cannot function at all due to their underlying inertial forces propulsion mechanism.Inspired by the bacteria in nature,our design has the unique feature of integrating a spiral-type head and an elastic?a-gellum-like tail,which enables the microrobot move freely in a low Re environment.Driven by external magnetic?eld,the microrobot can be operated wirelessly.In the case of drug delivery,the elastic tail not only serves as a drug reservoir,but also generates propul-sive force when proper driving torque is provided and its deforma-tion is triggered.Therefore,the energy ef?ciency of the system is improved compared with other rigid-body microrobots carrying a sphere drug payload.
Index Terms—Biomedical microrobot,drug delivery,?agella propulsion,swimming microrobot.
Manuscript received January10,2007;revised July02,2007.First published April8,2008;current version published April01,2009.This paper was recom-mended for publication by Associate Editor T.C.Yih and Editor D.Meldrum upon evaluation of the reviewers’comments.This paper was presented in part at the IEEE International Conference on Robotics and Automation,2006.This work was supported in part by the National Science Foundation under Grant ECS#0528967,in part by the Army Research Laboratory under Contract ARL W911NF-06-2-0029and Contract CERDEC W15P7T-06-P228,and in part by the Air Force Research Laboratory under a DURIP Project.
H.Li and J.Tan are with the Department of Electrical and Computer Engineering,Michigan Technological University,Houghton,MI49931USA (e-mail:lhuaming@https://www.doczj.com/doc/5d16987216.html,;jitan@https://www.doczj.com/doc/5d16987216.html,).
M.Zhang is with the Department of Mechanical,Aerospace,and Biomedical Engineering,University of Tennessee,Knoxville,TN37996-2210USA(e-mail: mjzhang@https://www.doczj.com/doc/5d16987216.html,).
Color versions of one or more of the?gures in this paper are available online at https://www.doczj.com/doc/5d16987216.html,.
Digital Object Identi?er10.1109/TASE.2008.917137
I.I NTRODUCTION
G ENERATING potential new drugs and precisely de-
livering drugs to target tissues or organs for treatment are equally important for disease treatment.Drug delivery has drawn the attention of many researchers in the medical and engineering communities in recent years.Drug delivery is one of the fastest growing health sectors.Sales of the drugs that incorporate drug delivery systems are increasing at an annual rate of15%.By2003,the U.S.drug delivery market alone was worth$24billion.Controlled drug delivery aims to deliver the drug to the desired site directly,without affecting other tissues or organs,which helps to keep side effects to a minimum[17]. Examples of critical needs for controlled drug delivery are cancer,AIDS,and brain disease treatments.Controlled drug delivery can help parenteral,oral,and transdermal route drug delivery.For the conventional methods of drug administration, usually,drug delivery at a constant controlled rate is prefer-able.However,a better method may be in response to the physiological needs of the body.This kind of system has not been implemented yet for drug delivery,even though it is quite common for many engineering control systems.
Recent developments of microelectromechanical systems (MEMS)and nanoelectromechanical systems(NEMS)make it possible to fabricate miniature robots that can be implanted into human bodies to accomplish certain complex tasks,such as con-trolled drug delivery and minimally invasive surgery.In[18], three-dimensional helical nanostructures including nanospi-rals and nanocoils are fabricated using hybrid nanorobotic approaches.In[8],a biomimetic swimming microrobot for destroying kidney stones in real human bodies is proposed. Bene?tting from their miniature size and biocompatible proper-ties,microrobots are able to reach and function within regions that are unsuitable for traditional medical devices,which make them a good choice for controlled drug delivery carrier.
In order to safely inject microrobots into human bodies,the diameter of the microrobot needs to be or smaller than0.8mm [24].In this case,the Reynolds number(i.e.,the ratio of inertial force to viscous force)is very low(less than one)[25].The Reynolds number(Re)de?ned by the propulsive
velocity,, and the typical dimension of the
organism
is,
where is the kinematic viscosity of the liquid environment.The Re of a?ow is a dimensionless parameter that measures the relative signi?cance of inertial forces to viscous forces.When Re is low, the viscous force involved in propulsion is dominant and the inertial force often becomes negligible.
In a low Reynolds number environment,traditional propul-sive methods,such as?sh-like actuators,scallops,and rigid oars which depend on reciprocal motions,cannot work ef?ciently or cannot function at all due to their underlying inertial forces
1545-5955/$25.00?2008IEEE
LI et al.:DYNAMICS MODELING AND ANALYSIS OF A SWIMMING MICROROBOT FOR CONTROLLED DRUG DELIVERY221
propulsion mechanism.In the work of[6],the effect of the Re on propulsive performance of a?sh-like wiggling micromachine is numerically analyzed.When Re is between10and100,the decrement of Re reduces the propulsion ef?ciency and increases the power consumption.When Re is less than one,the microma-chine loses thrust force completely due to the increased friction and pressure around the micromachine.
Bacteria live in low Reynolds environments in nature.In order to gain the mobility for better living condition or food(chemo-taxis),they often evolve to develop certain kind of handedness which enables them to generate the propulsion needed for the mobility.Many micro-organisms use?exible rotating?agella to provide propulsion,such as the bacterium Escherichia Coli, Bacillus Megaterium,and Trichomonas[2].Their?agellum is known as the smallest rotary propeller that can function effec-tively under low Reynolds environment.A bacterium usually consists of a basal body with a rotary motor,a universal joint al-lowing for the transmission of rotary motion and the?agellum which convert the rotary motion into translational thrust. Inspired by the spirochaeta and?agella of many bacteria in nature,a swimming microrobot is presented in this paper.The unique feature of this microrobot is the integration of a spiral-type head and an elastic?agellum-like tail.The spiral-type head of the microrobot can carry control and communication units. It also serves as the base and provides driving torque for the attached elastic tail.Film magnet could be deposited on the spiral-type wire and magnetized.When put in a rotating mag-netic?eld,the head rotates synchronously with the external ?eld.The rotation arouses different liquid pressure distribution around the microrobot and generates driving torque and propul-sive thrust.The propulsive force is produced because the resis-tive force in the direction normal to the wire is larger than that in the tangential direction.
The elastic tail functions like the?agellum of bacteria.It transforms from a thin straight cylinder into helical geometry when enough driving torque is provided through the head and the dramatic deformation(i.e.,bifurcation)is triggered.After the deformation,helical waves diffuse from the base of the head to the open end of the elastic tail.Hydrodynamic friction con-verts the rotational motion into thrust to the opposite direction of the propagating helical wave along the helix axis.
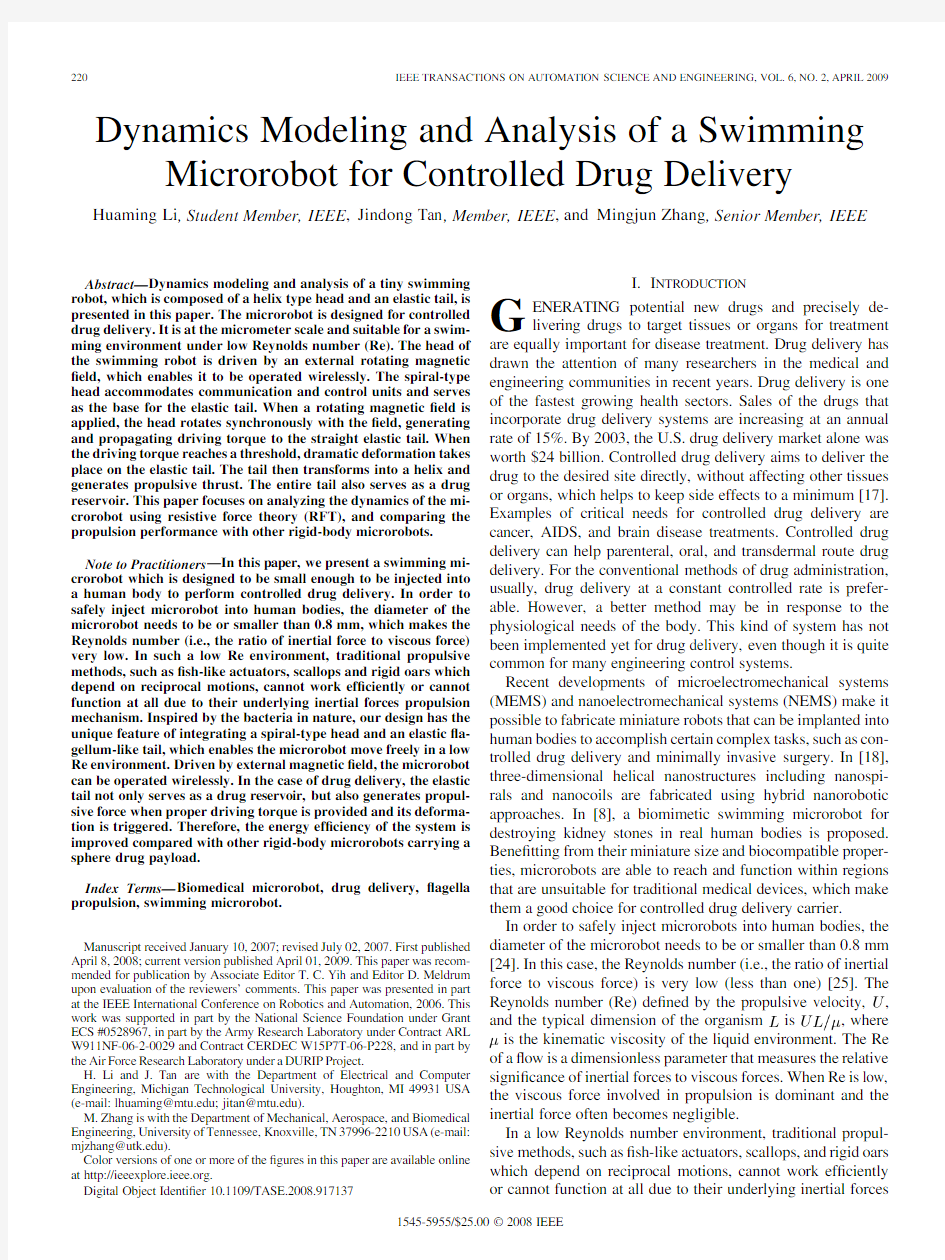
The swimming robot can be powered by an external rotating magnetic?eld which enables it to be operated wirelessly.It is designed to be in the micrometer scale so that it can swim in a human’s body freely.The special geometric feature makes it suitable for swimming under low Re environment.The schematic views of the microrobot(before and after the bifur-cation)are shown in Fig.1.This paper focuses on analyzing the dynamics of the microrobot,since it is crucial for further developing advanced controller and detailed implementation of the system.Resistive force theory is used to model and analyze the dynamics of the microrobot under two different situations when the elastic tail is with two different statuses.
II.R ELATED W ORKS
Inspired by the biology,several swimming microrobots were recently proposed.In[4],the authors present a?sh-like mi-crorobot which can swim with three degrees of freedom.It
is Fig.1.Schematic drawing of the spiral-type head and the elastic tail of the swimming microrobot:(a)before the bifurcation and(b)after the bifurcation. 45mm in length,10mm in width,and4mm in thickness. A3-mm swimming robot which is driven by Ferromagnetic polymer(FMP)actuators under magnetic?eld is developed in [5].The size of the swimming microrobot is3
mm2
mm 0.4mm.Since both of them use the propulsion mechanism relying on inertial force,they are not suitable for working under low Reynolds environments.In[6],numerical analysis for the effect of Re on propulsive performance of a submerged wiggling micromachine is given.Studies show that the decrease of Re deteriorates the propulsive performance
when.
When ,the thrust force from wiggling motion loses completely. In order to accommodate to the special low Re environ-ments,spiral-like microrobots which imitate bacteria have been proposed in several recent papers.A micro-machine that can operate under a wide-range of Re conditions is proposed by Ishiyama et al.in[7].The micro-machine contains a rigid cylindrical body and spiral blade.It is able to swim in a rotational magnetic?eld under different Re conditions from 430to
6.It demonstrates that the spiral-type design is a promising approach with a good adaptability to different Reynolds number.
In[8],a surgical microrobot that swims inside the human ureter to perform kidney stone destruction is proposed.The mi-crorobot uses multiwall carbon nanotubes which are driven into a helical shape to provide propulsion.Carbon nanotubes are grown vertically on a substrate which will provide the driving torque.While it gives the?uid mechanics modeling,the anal-ysis is limited to the situation that the conformation of the helical shape is done.
Behkam and Sitti present a swimming microrobot inspired by E.Coli in[9]and[10].An analytical model is developed to predict the thrust force,required torque,velocity and ef?-ciency.The research shows that all the parameters are only re-lated to geometrical characteristic.A scaled-up prototype for verifying the predicted values is also fabricated.The measured propulsive force of the prototype is in agreement with theoret-ical predictions.
222IEEE TRANSACTIONS ON AUTOMATION SCIENCE AND ENGINEERING,VOL.6,NO.2,APRIL2009 In the aforementioned research,the swimming microrobot
has a rigid cylindrical body with spiral blade,or a rigid
spiral-like body propelling a payload such as a sphere-like
head,or elastic tails which are grown from a rotating substrate
and shaped into helix to generate propulsion.
Compared with the rigid body microrobot,a microrobot with
an elastic tail which can generate the same thrust has several ad-
vantages.First,the microrobot can swim more easily in a con-
strained area of human bodies,due to the?exible dimensions.
Secondly,the elastic tail design makes it possible that several
tails form a bundle together to give larger thrust,which is very
hard for rigid body microrobots.In nature,bacteria often rely on
more than one?agellum to generate propulsion since one single
?agellum may not provide enough thrust.Finally,the tail itself
can be utilized as the drug reservoir in controlled drug delivery.
The tail containing the drug can be released directly to the tar-
geted area for best medical performance without affecting other
tissue or organs.The rigid head part can then be recycled to ac-
complish other missions.During the drug delivery mission,the
elastic tails makes the microrobot operate more ef?ciently be-
cause it provides helpful thrust as a propeller,rather than resis-
tive force as a pure payload.
Due to the feature of medical applications,wireless opera-
tion of the microrobots is always desired.RF energy is used in
[8].In this design,an elastic tail is attached to the spiral-type
head,whose wire is magnetized and enables the head to rotate
synchronously with an external rotating magnetic?eld.In this
way,the head can provide both the driving torque needed for the
elastic tail and the translational thrust needed for propelling the
microrobot.Furthermore,by changing the frequency and am-
plitude of the rotational magnetic?eld,the swimming velocity
of the microrobot can be controlled.The swimming direction
can also be controlled by changing the direction of the rotating
magnetic?eld.
Fabrication of nanocoils and coil-shaped carbon nanotubes
are proposed in[22]and[23].In the work of[18],3-D he-
lical nanostructures including nanocoils and nanospirals are
fabricated using hybrid nanofabrication approaches based
on nanorobotic manipulation.Processes that can effectively
handle,structure,and assemble these nanostructures into
NEMS are developed.Experiments also show that the radial
stiffness of the helical structure can be controlled.Those con-
trollable helical nanostructures could provide ideal building
blocks for the microrobot proposed in this paper.
III.N OMENCLATURE
For the convenience of the following discussion,typical vari-
ables used in this paper are listed as
follows.
Length of the head
part.
Length of the tail part before the bifurcation(contour
length).
Length of the tail part after the
bifurcation.
Helical amplitude of the head
part.
Helical amplitude of the tail part after the
bifurcation.
Viscosity.
Pitch of the helical
head.
Pitch of the tail after the
bifurcation.
Cross-sectional radius of the elastic
tail.
Cross-sectional radius of the wire of the helical
head.
Radius of the payload in the head
part.
Translational velocity of the swimming
microrobot.
Angular velocity of the swimming
microrobot.
Translational resistance coef?cient of a
sphere.
Rotational resistance coef?cient of a
sphere.
Translational resistance coef?cient of the elastic tail
(before the
bifurcation).
Rotational resistance coef?cient of the elastic tail
(before the
bifurcation).
RFT coef?cient along the direction normal to the body
center
line.
RFT coef?cient along the direction tangential to the
body center line.
IV.D YNAMICS M ODELING AND A NALYSIS
https://www.doczj.com/doc/5d16987216.html,erning Equations
Under low Reynolds number environment,the?ow of a?uid
is called Stokes?ow,where the viscous forces are much larger
than the inertial forces[16].The?uid in which the microrobot
swims is assumed to be incompressible.The Navier–Stokes
equations are the fundamental partial differentials equations
that describe the?ow of incompressible?uids.The equations
describing Stokes?ow are the Navier–Stokes equations with
the inertial and body force terms equal to
zero
(1)
where is the hydrostatic
pressure,is the constant viscosity
of the?uid,
and is the velocity vector.
Since any time-dependent terms which might account for any
imbalance in the Navier–Stokes equation are negligible,the dy-
namics can be considered to degenerate into a blend of kine-
matics and statics.The?uid acts on the swimming microrobot
with a system of forces that must effectively be in static equilib-
rium at all times[15].Following the governing law two sets of
balance equations can be set up:one is force balance,the other
is torque balance.
B.Tail Bifurcation
The dynamics modeling and analysis are divided into two
parts depending on the states of the elastic tail,before bifur-
cation and after bifurcation.Bifurcation is known as remark-
able deformation of rotating?laments.The studies of propulsive
performance and viscous dynamics of rotating elastic?laments
in[11]and[12]reveal that when applying increasing driving
torque to straight elastic polymers clamped on one end and open
the other,the polymer?lament exhibits a strongly discontinuous
shape deformation at a?nite torque
value and a?nite ro-
tation
frequency.
For a driving torque smaller
than or a rotation frequency
smaller
than,the?lament almost remains straight and the
generated propulsion is negligible.For a driving torque larger