习题答案 第1 1.简述典型实时数字信号处理系统组成部分。 答:包括:抗混叠滤波器( Anti-aliasing filter )、模数转换器 ADC ( Analog-to-Digital Converter )、数字信号处理、数模转换器 DAC ( Digital-to-Analog Converter )和抗镜像滤波器( Anti-image filter )。 2.简述X86 处理器完成实时数字信号处理的优缺点。 答:利用 X86 处理器完成实时数字信号处理。特点是处理器选择范围宽,主板及外设资源丰富,有多种操作 系统可供选择,开发、调试较为方便;缺点是数字信号处理能力不强,硬件组成较为复杂,系统体积、重量较大,功耗较高,抗环境影响能力较弱。 3.简述数字信号处理器的主要特点。 答:( 1)存储器采用哈佛或者改进的哈佛结构;(2)内部采用了多级流水;(3)具有硬件乘法累加单元;(4)可以实现零开销循环;( 5)采用了特殊的寻址方式;(6)高效的特殊指令;( 7)具有丰富的片内外设。 4.给出存储器的两种主要结构,并分析其区别。 答:存储器结构分为两大类:冯?诺依曼结构和哈佛结构。冯?诺依曼结构的特点是只有一个存储器空间、一套 地址总线和一套数据总线;指令、数据都存放在这个存储器空间中,统一分配地址,所以处理器必须分时访问程序和数据空间。哈佛结构程序存储器空间和数据存储器空间分开,具有多套地址、数据总线,哈佛结构是并行体系结构,程序和数据存于不同的存储器空间,每个存储器空间独立编址、独立访问。 5.简述选择数字信号处理器所需要考虑的因素。 答:应考虑运算速度、算法格式和数据宽度、存储器类型、功耗和开发工具。 6.给出数字信号处理器的运算速度指标,并给出其具体含义。 答:常见的运算速度指标有如下几种: (1)指令周期:执行一条指令所需的最短时间,数值等于主频的倒数;指令周期通常以ns (纳秒)为 单位。例如,运行在 200MHz 的 TMS320VC5510 的指令周期为 5ns。 ( 2) MIPS :每秒百万条指令数。 (3)MOPS :每秒百万次操作数。 (4)MFLOPS :每秒百万次浮点操作数。 (5)BOPS:每秒十亿次操作数。 (6)MAC时间:一次乘法累加操作花费的时间。大部分 DSP芯片可在一个指令周期内完成 MAC操作; (7)FFT 执行时间:完成 N 点 FFT 所需的时间。 FFT 运算是数字信号处理中的典型算法而且应用很广,因此该指标常用于衡量 DSP芯片的运算能力。 第2 1.TMS320C55x DSP 有哪些特征和优点?
第一章绪论 1.数字信号处理算法一般的实现方法有哪些?(详见课本 P2) 2.简述数字信号处理器的主要特点; 答:(1)存储器采用哈佛或者改进的哈佛结构;(2)内部采用了多级流水; (3)具有硬件乘法累加单元;(4)可以实现零开销循环;(5)采用了特殊的寻址方式;(6)高效的特殊指令;(7)具有丰富的片内外设。 3.举例请给出数字信号处理器的运算速度指标; 答:常见的运算速度指标有如下几种: (1)指令周期:执行一条指令所需的最短时间,数值等于主频的倒数;指令周期通常以ns(纳秒)为单位。例如,运行在200MHz的TMS320VC5510的指令周 期为5ns。 (2)MIPS:每秒百万条指令数。 (3)MAC时间:一次乘法累加操作花费的时间。大部分DSP芯片可在一个指令周期内完成MAC操作; (4)FFT执行时间:完成N点FFT所需的时间。FFT运算是数字信号处理中的典型算法而且应用很广,因此该指标常用于衡量DSP芯片的运算能力。 4. 简述哈佛结构的概念。 解:哈佛结构试验种将程序指令存储器和数据存储器分开的存储器结构。 哈佛机构是一种并行体系结构,它的主要特点是将程序和数据存储在不同的 存储空间中,即程序存储器和数据存储器是两个独立的存储器,每个存储器 独立编址,独立访问。 5. DSP与单片机,DSP与嵌入式处理器的主要区别是什么? 解:DSP运算能力强,擅长很多的重复数据运算,而MCU则适合不同信息 源的多种数据的处理诊断和运算,侧重于控制,速度并不如DSP。一般来说 MCU偏重于控制,DSP侧重于运算,MCU区别于DSP的最大特点在于它的通
用性,反应在指令集和寻址模式中。通常我们将的单片机和嵌入式芯片一般属于MCU,单片机8位和16位居多,ARM以32位居多。 6.TMS320C54x型DSP采用结构对程序存储器和数据存储器进行控制 7. DSP处理器按数据格式分为两类,分别是和 8. 从数据总线的宽度来说,TMS320C54x型DSP是位的DSP处理器 9.目前市场上DSP生产厂商位居榜首的是( D ) (5) A Motorola B ADI C Zilog D TI 第二章TMS320C54x的硬件结构 10. TMS320C54x DSP 芯片的存储器结构如何?(详见课本 P9) TMS320C54x 存储器由3 个独立的可选择空间组成:程序空间、数据空间和I/O 空间。程序存储器空间包括程序指令和程序中所需要的常数表格;数据存储器空间用于存储需要程序处理的数据或程序处理后的结果;I/O 空间用于与外部存储器映象的外设接口,也可以用于扩展外部数据存储空间。 C54x存储器空间通常可以分为3个可单独选择的空间: 64K程序空间、64K数据空间和64K I/O 空间。CPU状态寄存器的MP/MC、OVLY和 DROM位影响实际存储器的配置。 所有TMS320C54x 芯片都包括随机访问存储器(RAM)和只读存储器(ROM)。RAM可分成若干块,每一个块可以在一个机器周期内读两次或读一
第三章 DSP芯片开发工具的 特点及应用
§3.1 DSP开发环境 §3.2 通用目标文件格式COFF §3.3 编程工具特点及应用 §3.4 调试工具的特点及应用
XCHL
《DSP原理及应用》讲稿
1
宏源程序 文件
C语音 源文件 汇编语音 源文件
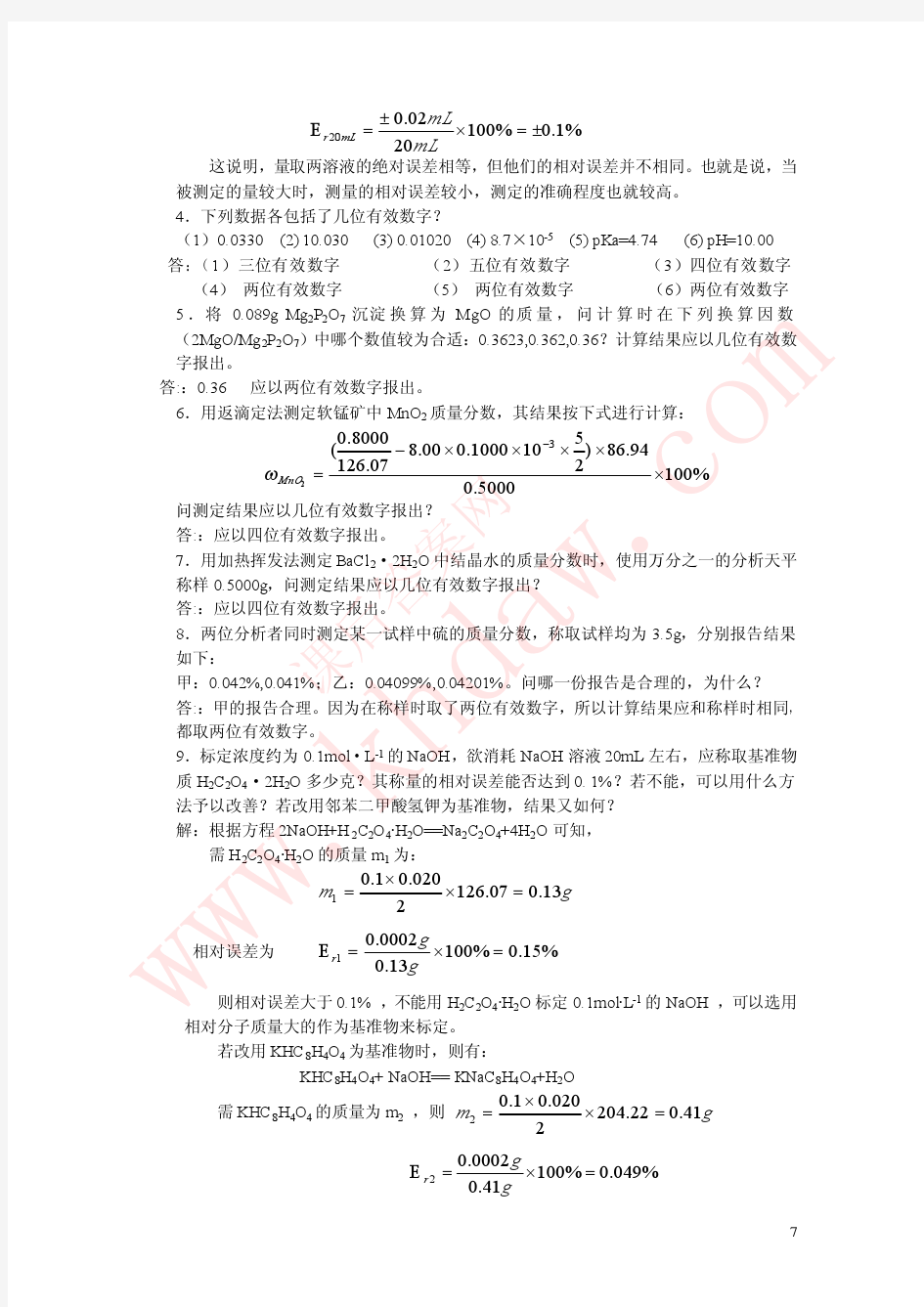
§3.1 DSP 开发环境
汇 编 语 音 开 发 流 程
归档器 宏文件库
C编译器 汇编语音 源文件 建库应 用程序 实时 支持库 Computer 调试工具
汇编器
归档器
COFF通用 目标文件
目标 文件库 十六进制 转换程序 EPROM中 的十六进制 代码程序 绝对 列表器
链接器 可执行的单个 COFF文件
交叉引用 TMS320C2XX 芯片 列表器 返回本章首页
2
XCHL
《DSP原理及应用》讲稿
§3.2 通用目标文件格式COFF
COFF文件格式是基于段(section)的概念建立的,即程序被分 解成各种段的组合体:如文本段、数据段等。这种文件格式便于 实现模块化程序设计,即程序员设计时只需基于代码段和数据段 等概念进行,不需关注每条命令或每个数据的具体目标地址。至 于它们的最终将处于存储器的哪个位置,将由链接器来安排。
? ? ? ? ? ?
段的概念及分类 段的创立 段的组合及其在存储器中的映象 程序重定位 COFF文件内的符号 COFF文件的装载
?
《DSP原理及应用》讲稿
返回本章首页
XCHL
3
第一章引言 1. 一个存储单元有哪两个属性?寄存器与存储器有什么不同? 一个存储单元的两个属性是:地址与值。寄存器是特殊的存储器,读写寄存器可引发相关电路的动作。 2. 由单片机构成的最小系统有哪几部分构成? 由单片机构成的最小系统包括电源和晶体振荡器。 3. DSP是哪三个英文词的缩写?中文意义是什么? DSP是Digital Signal Processor的缩写,中文意义是数字信号处理器。 4. 哈佛结构计算机与冯?诺伊曼结构计算机有什么差别? 哈佛结构计算机有独立的数据总线和程序总线,冯?诺伊曼结构计算机数据和程序共用一套总线。 5. 微控制器与微处理器有什么不同? 微控制器内部可固化程序,而微处理器内部不含程序。 6. TMS320LF24xA系列单片机有几套总线?分别起什么作用?总线中数据线和地址线分别有多少条?最 大可以访问多少存储单元?每个存储单元由多少位组成? TMS320LF24xA系列单片机有三套总线,分别是程序读总线、数据读总线和数据写总线。每套总线中各有16条数据线和16条地址线,最大可以访问64K个存储单元,每个存储单元由16位组成。 7. 什么是操作码?什么是操作数? 操作码用于表示指令所要执行的动作,操作数表示指令所涉及的数据。 8. 实现一条指令的功能要经过哪四个阶段?CPU为什么要采用流水线结构? 实现一条指令的功能要经过“取指”、“译码”、“取操作数”和“执行”四个阶段,CPU采用流水线结构可以同时使多条指令处于不同的处理阶段,实现并行处理,提高CPU的指令吞吐率。 第二章寻址方式与主要寄存器操作 1. 有哪三种寻址方式? 三种寻址方式是:立即数寻址、直接寻址和间接寻址。 2. 指令LACL #10与LACL 10有什么区别?各为什么寻址方式?含义是什么? 指令LACL #10将常数10装载到累加器,指令LACL 10将地址10(假设DP为0)处的值装载到累加器。前者是立即数寻值,操作数在指令中;后者是直接寻址,操作数的地址最低7位在指令中。 3. 指令LACC #1234h和LACC #0ABCDh执行后累加器ACC中为何值?与SXM 的状态有关吗? 指令LACC #1234h执行后累加器ACC中为0x00001234。
第三章习题答案 3.1 (1)非周期 (2)N=1 (3)N=10 (4)N=4 (5)N=20 3.2 02s f f ωπ =,1s s f T = (1)0153,2f ωπ== ;0.3s T =,05 f π = (2)010,25f ωπ==;0.3s T =,050 3 f = (3)0,0.55f πω==;0.3s T =,01 3 f = (4)03.5,8.75f ωπ==;0.3s T =,035 6 f = (5) ()() ()(){ } 0.20.2 1 0.20.2 0.20.2(0.2)(0.2) 1 c o s (0.2)() 2130.6c o s (0.2)() 1.8()0.6() 211.8 0.6()0. 6() 2110.910.610.6j n j n n n j n j n n n j n j n j j n e e F n u n F e e u n F e u n F e u n e e ππππππωπωπππ-+-----+=+?? ??-=-?+-??? ?? ? ????=-?-+-? ??? ?? =-+ ?++?? 3.3 function [X]=myDTFT(x, n, w) % 计算DTFT % [X]=myDTFT(x, n, w) %X=输出的DTFT 数组 %x=输入的有限长序列 %n=样本位置行向量 %w=频率点位置行向量 X=x*exp(-j*n ’*w) 3.4 (1) 7 ()10.3j j X e e ω ω -= - (2)20.51 ()(10.5)10.5j j j j e X e e e ωω ωω ---=--- (3)2()0.80.1610.4j j j e X e e ω ω ω --=??-
三、TMS320C54X的指令系统 TMS320C5000指令系统TMS320C54x的指令集 TMS320C54x的指令集有近两百条指令,按功能分为如下几类: ?算术运算指令?逻辑运算指令?程序控制指令?装入和存储指令 一、算术运算指令 算术运算指令可分为如下几类: ?加法指令?减法指令?乘法指令?乘加指令?乘减指令?双数/双精度指令?特殊操作指令定点DSP中数据表示方法 当它表示一个整数时,其最低位(D0)表示1,D1位表示2的1次方,次高位(D14)表示2的14方。 如果表示一个有符号数时,最高位(D15)为符号位,0表示正数,1表示负数。例如,7FFFH 表示最大的正数32767(十进制),而0FFFFH表示最大的负数-1(负数用2的补码方式显示)。实现16位定点加法 ‘C54X中提供了多条用于加法的指令,如ADD,ADDC,ADDM和ADDS。其中ADDS用于无符号数的加法运算,ADDC用于带进位的加法运算(如32位扩展精度加法),而ADDM专用于长立即数的加法。 1、加法指令 使用ADD完成加法 LD temp1, A ;将变量temp1装入寄存器A ADD temp2, A ;将变量temp2与寄存器A相加 ;结果放入A中 STL A, temp3 ;将结果(低16位)存入变量 ;temp3中。 注意:这里完成计算temp3=temp1+temp2,我们没有特意考虑temp1和temp2是整数还是小数,在加法和下面的减法中整数运算和定点的小数运算都是一样的。
利用ADDS实现32位数据装入: LD #0,DP ; 设置数据页指针LD 60H,16,A ; 将60H的内容装到A的高16位ADDS 61H, A ;将61H的内容加到A的低16位DLD 60H,B ; 直接装入32位到B寄存器 2、减法指令 TMS320C54x汇编指令集:符号与缩写:
3.9习题 1.计算下列各有限长序列的N 点离散傅立叶变换。 (1)0()11N x n n ≤≤-= (2))()(n n x δ= (3))()(0n n n x -=δ 100-≤≤N n (4))()(n R a n x N n = (5))()(0n R e n x N n j ω= (6))()cos()(0n R n n x N ω= (7))()(2n R e n x N mn N j π= 10-≤≤N m (8))()2sin( )(n R mn N n x N π= 10-≤≤N m 解 (1) 21 00()[()]010 N j kn N n k X k D F T x n e k N N k π--=≠?== =≤≤-?=?∑ (2)21 0[()]()101N j kn N n D F T x n n e k N πδ--== =≤≤-∑ (3)0 221 0[()]()01N j kn j kn N N n D F T x n n n e e k N ππδ---== -=≤≤-∑ (4)21 201[()]()011N N j kn n N N j k n N a D F T x n a R n e k N a e ππ---=-= = ≤≤--∑ (5)00021 2() 1[()]()011j N N j kn j n N N j k n N e D F T x n e R n e k N a e πωωπω--- =-= = ≤≤--∑ (6)21 00 [()]co s ()N j kn N N n D F T x n n R n e πω--== ∑ 00000021 22() () 1()2 1101 11N j kn j n j n N n j N j N j k j k N N e e e e e k N ae ae πωωωωππωω---=--+ = +--= + ≤≤---∑ (7)221 0[()]()01N j m n j kn N N N n k m D F T x n e R n e k N N k m ππ--=≠?= =≤≤-?=?∑
数字信号处理(方勇)第三章习题答案
3-1 画出) 5.01)(25.01() 264.524.14)(379.02()(2 1 1 211------+--+--=z z z z z z z H 级联型网络 结构。 解: 2 3-2 画出112112(23)(465) ()(17)(18) z z z H z z z z --------+= --+级联型网络结构。 解: () x n () y n 24 3-3 已知某三阶数字滤波器的系统函数为 12 11252333()111(1)(1) 322 z z H z z z z -----++= -++,试画出其并联型网 络结构。 解:将系统函数()H z 表达为实系数一阶,二阶子 系统之和,即:
()H z 1 1122111111322 z z z z ----+= +-++ 由上式可以画出并联型结构如题3-3图所示: ) 题3-3图 3-4 已知一FIR 滤波器的系统函数为 121()(10.70.5)(12) H z z z z ---=-++,画出该FIR 滤波器 的线性相位结构。 解: 因为1 21123()(10.70.5)(12)1 1.30.9H z z z z z z z ------=-++=+-+, 所 以由第二类线性相位结构画出该滤波器的线性相位结构,如题3-4图所示:
() x n 1-1 -1 z - 题3-4图 3-5 已知一个FIR 系统的转移函数为: 12345()1 1.25 2.75 2.75 1.23H z z z z z z -----=+--++ 求用级联形式实现的结构流图并用 MATLAB 画出其零点分布及其频率响应曲线。 解: 由转移函数可知,6=N ,且)(n h 偶对称,故 为线性相位系统,共有5个零点,为5阶系统,因而必存在一个一阶系统,即1±=z 为系统的零点。而最高阶5 -z 的系数为+1,所 以1-=z 为其零点。)(z H 中包含1 1-+z 项。所以: 11()()(1)H z H z z -=+。 1() H z 为一四阶子系统,设
第一章: 1、数字信号处理的实现方法一般有哪几种? (1) 在通用的计算机上用软件实现 (2) 在通用计算机系统中加上专用的加速处理机实现 (3) 用通用的单片机实现,这种方法可用于一些不太复杂的数字信号处理 (4) 用通用的可编程DSP 芯片实现,可用于复杂的数字信号处理算法 (5) 用专用的DSP 芯片实现 (6) 用基于通用dsp 核的asic 芯片实现 2、简单的叙述一下dsp 芯片的发展概况? 答:第一阶段,DSP 的雏形阶段(1980 年前后) 代表产品:S2811。主要用途:军事或航空航天部门 第二阶段,DSP 的成熟阶段(1990 年前后) 代表产品:TI 公司的TMS320C20 主要用途:通信、计算机领域第三阶段,DSP 的完善阶段(2000 年以后) 代表产品:TI 公司的TMS320C54 主要用途:各行业领域 3、可编程dsp 芯片有哪些特点? (1)采用哈佛结构:冯.诺依曼结构,哈佛结构,改进型哈佛结构 (2)采用多总线结构 (3)采用流水线技术 (4) 配有专用的硬件乘法-累加器 (5) 具有特殊的dsp 指令 (6) 快速的指令周期
(7) 硬件配置强 (8) 支持多处理器结构 (9) 省电管理和低功耗 4、什么是哈佛结构和冯.诺依曼结构?它们有什么区别? 哈佛结构:该结构采用双存储空间,程序存储器和数据存储器分开,有各自独立的程序总线和数据总线,可独立编址和独立访问,可对程序和数据进行独立传输,使取指令操作、指令执行操作、数据吞吐并行完成,大大地提高了数据处理能力和指令的执行速度,非常适合于实时的数字信号处理。 冯.诺依曼结构:该结构采用单存储空间,即程序指令和数据共 用一个存储空间,使用单一的地址和数据总线,取指令和取操作数都是通过一条总线分时进行。当进行高速运算时,不但不能同时进行取指令和取操作数,而且还会造成数据传输通道的瓶颈现象,其工作速度较慢。区别:哈佛:该结构采用双存储空间,程序存储器和数据存储器分开,有各自独立的程序总线和数据总线,可独立编址和独立访问,可对程序和数据进行独立传输,使取指令操作、指令执行操作、数据吞吐并行完成,大大地提高了数据处理能力和指令的执行速度,非常适合于实时的数字信号处理。 冯:当进行高速运算时,不但不能同时进行取指令和取操作数,而且还会造成数据传输通道的瓶颈现象,其工作速度较慢。 5、什么是流水线技术? 答:每条指令可通过片内多功能单元完成取指、译码、取操作数和执
第一章 1.简述典型实时数字信号处理系统组成部分。 答:包括:抗混叠滤波器(Anti-aliasing filter)、模数转换器ADC(Analog-to-Digital Converter)、数字信号处理、数模转换器DAC(Digital-to-Analog Converter)和抗镜像滤波器(Anti-image filter) 。 2.简述X86处理器完成实时数字信号处理的优缺点。 答:利用X86处理器完成实时数字信号处理。特点是处理器选择范围宽,主板及外设资源丰富,有多种操作系统可供选择,开发、调试较为方便;缺点是数字信号处理能力不强,硬件组成较为复杂,系统体积、重量较大,功耗较高,抗环境影响能力较弱。 3.简述数字信号处理器的主要特点。 答:(1)存储器采用哈佛或者改进的哈佛结构;(2)内部采用了多级流水;(3)具有硬件乘法累加单元;(4)可以实现零开销循环;(5)采用了特殊的寻址方式;(6)高效的特殊指令;(7)具有丰富的片内外设。 4.给出存储器的两种主要结构,并分析其区别。 答:存储器结构分为两大类:冯·诺依曼结构和哈佛结构。冯·诺依曼结构的特点是只有一个存储器空间、一套地址总线和一套数据总线;指令、数据都存放在这个存储器空间中,统一分配地址,所以处理器必须分时访问程序和数据空间。哈佛结构程序存储器空间和数据存储器空间分开,具有多套地址、数据总线,哈佛结构是并行体系结构,程序和数据存于不同的存储器空间,每个存储器空间独立编址、独立访问。 5.简述选择数字信号处理器所需要考虑的因素。 答:应考虑运算速度、算法格式和数据宽度、存储器类型、功耗和开发工具。 6.给出数字信号处理器的运算速度指标,并给出其具体含义。 答:常见的运算速度指标有如下几种: (1)指令周期:执行一条指令所需的最短时间,数值等于主频的倒数;指令周期通常以ns(纳秒)为单位。例如,运行在200MHz的TMS320VC5510的指令周期为 5ns。 (2)MIPS:每秒百万条指令数。 (3)MOPS:每秒百万次操作数。 (4)MFLOPS:每秒百万次浮点操作数。 (5)BOPS:每秒十亿次操作数。 (6)MAC时间:一次乘法累加操作花费的时间。大部分DSP芯片可在一个指令周期内完成MAC操作; (7)FFT执行时间:完成N点FFT所需的时间。FFT运算是数字信号处理中的典型算法而且应用很广,因此该指标常用于衡量DSP芯片的运算能力。
一、填空题 第一章 1.数字信号处理特点大量的实时计算(FIR IIR FFT),数据具有高度重复(乘积和操作在滤波、卷积和FFT中等常见)。 2.信号处理的作用信号改善;信号检测、估计等 3.信号处理的方法信号波形分析/变换、滤波、现代谱估计/分析、自适应滤波等。 4.信息系统包括采集、传输、处理、等。5.数字信号处理常用算法有FIR 滤波、IIR 滤波、离散傅里叶变换、卷积、离散余弦变换等 6.处理器速度的提高得益于器件水平、处理器结构、并行技术等。7.DSP结构特点包括采用哈佛结构体系、采用流水线技术、硬件乘法器、多处理单元、特殊的DSP指令。 8.DSP芯片按用途分为通用型DSP 、专用型DSP 。9.DSP芯片按数据格式分为浮点型、定点型。 第二章 1.C28x芯片具有C27X、C28X、C2XLP操作模式。2.C28x芯片模式选择由ST1中的AMODE和OBJMODE位组合来选定模式。 3.CPU内核由CPU、仿真逻辑、接口组成。 4.CPU主要特性是保护流水线、独立寄存器空间算术逻辑单元(ALU)、地址寄存器算术单元(ARAU)、循环移位器乘法器。 5.CPU信号包括存储器接口信号、时钟和控制信号、复位和中断信号、仿真信号。 6.TMS320F2812组成特点是32位、定点、改进哈佛结构、循环的寻址方式。7.存储器接口有3组地址总线。 8.存储器接口有3组数据总线。 9.存储器接口地址总线有PAB、DRAB、DWAB、 10.CPU中断控制寄存器有IFR 、IER 、DBGIER。 11.ACC累加器是32位的,可表示为ACC、AH、AL。12.被乘数寄存器是32 位的,可表示为XT、T、TL 。13.乘数结果寄存器是32位的,可表示为P 、PH、PL。14.数据页指针寄存器16 位的,有65536 页,每页有64个存储单元。数据存储空间容量是4M字。 15.堆栈指针复位后SP指向地址是0x000400h 。 第三章 1.DSP芯片内部包含存储器类型有片内双访问存储器(DARAM)、片内单访问程序/数据RAM(SARAM)、掩膜型片内ROM存储器、闪速存储器(Flash)一次性可编程存储器(OTP)。 2.C28x具有32 位的数据地址和22位的程序地址,总地址空间可达4G字(每个字16位)的数据空间和4M字的程序空间。 3.在程序地址中保留了64个地址作为CPU的32个中断向量。
第一章: 答:数字信号处理的实现是用硬件软件或软硬结合的方法来实现各种算法。 (1 在通用的计算机上用软件实现;(2 在通用计算机系统中加上专用的加速处理机实现; (3 用通用的单片机实现,这种方法可用于一些不太复杂的数字信号处理,如数字控制;(4 用通用的可编程DSP 芯片实现。与单片机相比,DSP 芯片具有更加适合于数字信号处理的软件和硬件资源,可用于复杂的数字信号处理算法;(5 用专用的DSP 芯片实现。在一些特殊的场合,要求的信号处理速度极高,用通用DSP 芯片很难实现(6)用基于通用dsp 核的asic 芯片实现。 答:第一阶段,DSP 的雏形阶段(1980年前后)。代表产品:S2811。主要用途:军事或航空航天部门。第二阶段,DSP 的成熟阶段(1990年前后)。代表产品:TI 公司的TMS320C20 主要用途:通信、计算机领域。第三阶段,DSP 的完善阶段(2000年以后)。代表产品:TI 公司的TMS320C54主要用途:各个行业领域。 答:1、采用哈佛结构(1)冯。诺依曼结构,(2)哈佛结构(3)改进型哈佛结构2、采用多总线结构3. 采用流水线技术4、配有专用的硬件乘法-累加器5、具有特殊的dsp 指令6、快速的指令周期7、硬件配置强8、支持多处理器结构9、省电管理和低功耗 答:哈佛结构:该结构采用双存储空间,程序存储器和数据存储器分开,有各自独立的程序总线和数据总线,可独立编址和独立访问,可对程序和数据进行独立传输,使取指令操作、指令执行操作、数据吞吐并行完成,大大地提高了数据处理能力和指令的执行速度,非常适合于实时的数字信号处理。冯。诺依曼结构:该结构采用单存储空间,即程序指令和数据共用一个存储空间,使用单一的地址和数据总线,取指令和取操作数都是通过一条总线分时进行。当进行高速运算时,不但不能同时进行取指令和取操作数,而且还会造成数据传输通道的瓶颈现象,其工作速
1. 利用DFT 矩阵计算序列()(0,1,2,3)x n =的4点DFT 。 2. 利用上述序列4点DFT 结果和频域内插公式计算该序列在频点 28π处的DTFT 结果;直接利用DFT 计算上述序列在 28π处DTFT 结果。 3. 以2400Hz 为采样频率对一模拟信号进行采样,得到序列()(1,1,1,1,1,1)x n =;已知序列 DTFT 结果在频点2 π 5400Hz 处的幅度;另,对序列作8点DFT ,求(2)X 。 4. 一FIR 数字滤波器,其传递函数为123()10.50.40.4H z z z z ---=+++;利用DFT 求该 系统在0.8π处的频率响应。 5. 对一实序列作8点DFT ,已知: (1) 1.7 1.5(3)0.2 4.1(6)2 X j X j X j =-=+= 求(2),(5),(7)X X X 。 6. 若()x n 为N 点实序列,且有()(())N x n x n =-,求证该类序列的N 点DFT 变换可按如下 方式完成: 10102()()cos 12()()cos N n N k nk X k x n N nk x n X k N N ππ-=-=== ∑∑ 7. 若1()x n 为N 点实序列,且有1()()x n jx n =;现对()x n 作N 点DFT ,并由()R X k 、() I X k 表示其实部和虚部,求证下列结果: 1101102()()sin 2()()cos N R n N I n nk X k x n N nk X k x n N ππ-=-===∑∑
8. 判断在下列序列中,哪些序列的DFT 为实序列;哪些序列的DFT 为纯复序列。 1233()(1,0.5,1,0,0,1,0.5) ()(1,0.5,1,1,0,1,1,0.5) ()(0,0.5,1,1,0,1,1,0.5) ()(1,2,0,0,1,0,0,2)x n x n x n x n ==--=---=- 9. 已知序列1()x n 的2点结果为(2,0),2()x n 4点DFT 结果为(3,1,1,1)-;令 12()()()y n x n x n =*,求(2)y 。 10. 有限长序列1()x n 在范围099n ≤≤之外为0;另,有限长序列2()x n 在范围1039 n ≤≤之外为0;现令()L y n 为两者的线性卷积结果,()C y n 为两者100点循环卷积结果;问n 取何值有()()L C y n y n =。 11. 从定义开始推导基2 DIT IFFT 变换算法,并画出8N =的流图。 12. 从定义开始推导基2 DIF IFFT 变换算法,并画出8N =的流图。 13. 开发一个基3 按时间抽选FFT 算法,其中2v N =,并画出9N =的流图。需要多少次 复数乘法?其中的操作可以原位完成吗? 14. 当算法为按频率抽取时,重做上题。 15. 考虑如下差分方程描述的IIR 系统: ()()()10,N M k k k k y n a y n k b x n k N M ===--+->∑∑ 描述使用FFT 算法计算频率响应2,0,1,,1H k k N N π??=- ???的步骤。 16. 已知()X k 和()Y k 分别是两个N 点时序列()x n 和()y n 的N 点DFT ,若要求() x n 和()y n ,为提高运算效率,试设计用一次N 点IFFT 来完成。 17. 设()x n 是长度为2N 的有限长时序列,()X k 为()x n 的2N 点DFT 。若已知()X k ,
第3章习题 1、下面哪条指令是端口地址寻址指令?C (A)LD #0,A (B)MVKD EXAM1,*AR5 (C)PORTR FIFO,*AR5 (D)READA 60H 2、请解释下列指令的功能并比较异同。 (1)LD #60H,A A=#60H (2)LD 60H,A A=60H (3)LD *(60H),A=地址60H里面存储的内容 3、指令解释。 (1)READA Smem 把A寻址的寄存器的值督导数据单元中(2)WRITA Smem 把数据单元中的值写到A寻址的寄存器中 4、程序中给出如下两条指令,请问实际寻址的数据存储器的16位地址是多少? LD #5,DP ;DP=#5 LD 60H,A ; A=60H 5、已知单操作数间接寻址指令LD *AR5,B,请问ARF=? 6、下面哪个间接寻址单操作数表示循环寻址?C (A)*AR2-0B (B)*AR2-0% (C)*AR2(5)(D)*+AR2(5) 7、下面哪条指令汇编时不会报错?B (A)MAC *AR1,*AR2,A
(B)MAC *AR2,*AR3,B (C)MAC *AR0,*AR1,A (D)MAC *AR5,*AR6,B 8.试分析下述指令执行后相应寄存器、状态位及数据存储器单元数据的变化。 (1)BANZ 2008h, *AR4- (2)EXP A (3)OR A, +3, B ( 4)CMPR 2, AR4 A B A B 指令执行前指令执行后A T A T 指令执行前指令执行后PC AR4 PC AR4 指令执行前指令执行后
(5)RND A, B A B A B 指令执行前指令执行后TC AR0 TC AR0 指令执行前指令执行后AR4 AR4
第三章习题 1. Consider a Wiener filtering problem characterized by the following values for the correlation matrix R of the tap-input vector x (n) and cross-correlation vector p between x (n) and the desired response d(n): ?? ????=??????=25.05.015.05.01P R (a) Suggest a suitable value for the step-size parameter μ that would ensure convergence of the method of steepest descent, based on the given value for matrix R . (b) Using the value proposed in part (a), determine the recursions for computing the elements )(1n w and )(2n w of the tap-weight vector w (n). For this computation, you may assume the initial values 0)0()0(21==w w . (c) Investigate the effect of varying the step-size parameter μ on the trajectory of the tap-weight vector w (n) as a varies from zero to infinity. 2. The error performance of a real-valued filter, using a single tap weight w , is defined by ,))(0(20min w w r J J -+= where r(0) is the autocorrelation function of the tap input x (n) for zero lag, min J is the minimum mean-square error, and o w is the Wiener solution for the optimum value of the tap weight w . (a) Determine the bounds on the step-size parameter μof the steepest-descent algorithm used to recursively compute the optimum solution o w . (b) Plot the curve for cost function of the filter. 3. Continuing with Problem 2, do the following: (a) Formulate the learning curve of the filter in the terms of its only
3-1 画出) 5.01)(25.01() 264.524.14)(379.02()(2 1 1 211------+--+--=z z z z z z z H 级联型网络结构。 解: 24 3-2 画出112112(23)(465) ()(17)(18) z z z H z z z z --------+=--+级联型网络结构。 解: () x n () y n 24 3-3 已知某三阶数字滤波器的系统函数为12 11252333()111(1)(1) 322 z z H z z z z -----++=-++,试画出其并联型网络结构。 解:将系统函数()H z 表达为实系数一阶,二阶子系统之和,即: ()H z 1 1122111111322 z z z z ----+= +-++ 由上式可以画出并联型结构如题3-3图所示:
) 题3-3图 3-4 已知一FIR 滤波器的系统函数为1 21()(10.70.5)(12)H z z z z ---=-++,画出该FIR 滤波器的线性相位结构。 解: 因为1 21123()(10.70.5)(12)1 1.30.9H z z z z z z z ------=-++=+-+,所以由第二类 线性相位结构画出该滤波器的线性相位结构,如题3-4图所示: () x n 1-1 -1 z - 题3-4图 3-5 已知一个FIR 系统的转移函数为: 12345()1 1.25 2.75 2.75 1.23H z z z z z z -----=+--++ 求用级联形式实现的结构流图并用MATLAB 画出其零点分布及其频率响应曲线。 解: 由转移函数可知,6=N ,且)(n h 偶对称,故为线性相位系统,共有5个零点,为5 阶系统,因而必存在一个一阶系统,即1±=z 为系统的零点。而最高阶5 -z 的系数为 +1,所以1-=z 为其零点。)(z H 中包含1 1-+z 项。所以:11()()(1)H z H z z -=+。 1()H z 为一四阶子系统,设1 2341()1H z bz cz bz z ----=++++,代入等式,两边相 等求得1 2341()10.2530.25H z z z z z ----=+-++,得出系统全部零点,如图3-5(b )
一.填空题(本题总分12 分,每空1 分) 1.累加器A 分为三个部分,分别为;;。 1.AG,AH,AL 2.TMS320VC5402 型DSP 的内部采用条位的多总线结构。 2.8,16 3.TMS320VC5402 型DSP 采用总线结构对程序存储器和数据存储器进行控制。 3.哈佛 4.TMS329VC5402 型DSP 有个辅助工作寄存器。 4.8 个 5.DSP 处理器TMS320VC5402 中DARAM 的容量是字。 5.16K 字 6.TI 公司的DSP 处理器TMS320VC5402PGE100 有个定时器。 6.2 7.在链接器命令文件中,PAGE 1通常指存储空间。 7.数据 8.C54x 的中断系统的中断源分为中断和中断。 8.硬件、软件 1.TI 公司DSP 处理器的软件开发环境是。 1.答:CCS(Code Composer Studio) 2.DSP 处理器TMS320VC5402 外部有根地址线。 2.答:20 根 3.直接寻址中从页指针的位置可以偏移寻址个单元。 3.答:128 4.在链接器命令文件中,PAGE 0 通常指存储空间。 4.答:程序 5.C54x 系列DSP 处理器中,实现时钟频率倍频或分频的部件是。 5.答:锁相环PLL 6.TMS320C54x 系列DSP 处理器上电复位后,程序从指定存储地址单元开始工作。 6.答:FF80h 7.TMS320C54x 系列DSP 处理器有个通用I/O 引脚,分别是。 7.答:2 个,BIO 和XF 8.DSP 处理器按数据格式分为两类,分别是;。 8.答:定点DSP 和浮点DSP 9.TMS329VC5402 型DSP 的ST1 寄存器中,INTM 位的功能是。 9.答:开放/关闭所有可屏蔽中断 10.MS320C54X DSP 主机接口HPI 是位并行口。 10.答:8 1.在C54X 系列中,按流水线工作方式,分支转移指令的分为哪两种类型:;。 1.答:无延迟分支转移,延迟分支转移 3.C54x 的程序中,“.bss”段主要用于。 3.答:为变量保留存储空间 4.从数据总线的宽度来说,TMS320VC5402PGE100 是位的DSP 处理器。 4.答:16 位 7.TMS320VC5402 型DSP 处理器的内核供电电压伏。 7.答:1.8v
D S P原理及应用课后 习题答案
简述DSP芯片的主要特点 哈佛结构----将程序和数据存储在不同的存储空间中,即程序存储器和数据存储器是两个相互独立的存储器,每个存储器独立编址,独立访问。 多总线结构---保证在一个机器周期内可以多次访问程序存储空间和数据存储空间。 指令系统的流水线操作--减少指令执行时间,增强处理器的处理能力。取址,译码,取操作和执行四个阶段。 专用的硬件乘法器--使乘法累加运算能在单个周期内完成。 特殊的DSP指令、快速的指令周期、硬件配置强。 详细描述冯诺依曼结构和哈佛结构,并比较不同? 冯诺依曼结构--数据和程序共用总线和存储空间,在某一时刻,只能读写程序或者读写数据。将指令、数据、地址存储在同一个存储器统一编址,依靠指令计数器提供的地址来区分是指令‘数据还是地址,取指令和取操作数都访问同一存储器,数据吞吐率低。 哈佛结构----将程序和数据存储在不同的存储空间中,即程序存储器和数据存储器是两个相互独立的存储器,每个存储器独立编址,独立访问。改进的还允许在程序存储空间和数据存储空间之间相互传送数据。 DSP系统的设计过程? 确定DSP系统设计的性能指标;进行算法优化与模拟;选择DSP芯片和外围芯片;进行硬件电路的设计;进行软件设计;进行软硬件综合调试。 请描述TMS320C54x的总线结构? C54X采用先进的哈佛结构并具有八组总线, 其独立的程序总线和数据总线允许同时读取指令和操作数,实现高度的并行操作。程序总线PB传送从程序存储器来的指令代码和立即数。 3组数据总线连接各种元器件。CB和DB总线传送从数据存储器读出的操作数,EB总线传送写入到存储器中的数据。(1分) 4组地址总线PAB\CAB\DAB\EAB传送执行指令所需的地址。 TMS320C54x片内存储器一般包括哪些种类?如何配置片内存储器? C54X片内存储器一般包括两种类型:ROM(只读存储器),RAM(随机访问存储器)。RAM又可分为双访问DARAM和单访问SARAM。 简述TMS320C54X芯片的CPU各组成部分及其功能。 CPU状态和控制寄存器:用于设置各种工作条件和工作方式的状态以及存储器配置状态和控制信息。 40位算术逻辑单元、40位累加器A和B:两者共同完成算术运算和逻辑运算。 桶形移位寄存器:使处理器能完成数字定标,位提取,对累加器进行归一化处理等操作。 乘法器/加法器单元:在单周期内完成一次乘法累加运算。 比较选择和存储单元:是专门为Viterbi算法设计的加法,比较,选择操作的硬件单元。 指数编码器:用于支持单周期指令EXP的专用硬件。 TMS320C54x存储器包括哪几个空间? 64k程序存储空间:程序指令和程序中所需的常数表格 64k数据存储空间:存储需要程序处理的数据或程序处理后的结果 64kI/O存储空间:存储与外部存储器映像的外设接口 TMS320C54x有几种状态和控制寄存器?它们的功能?