基于CAN总线的汽车电动车窗控制系
统设计毕业论文
目录
摘要............................................... 错误!未定义书签。ABSTRACT........................................... 错误!未定义书签。1绪论.. (2)
1.1 研究背景 (2)
1.2 汽车车载网络技术概述 (3)
1.3 电动车窗控制技术的发展概况 (4)
1.4 课题的主要内容和意义 (5)
1.4.1 课题的主要内容 (5)
1.4.2 课题的意义 (5)
1.5 本章小结 (5)
2 CAN总线 (6)
2.1 CAN简介 (6)
2.2 按照ISO/OSI参考模型CAN的分层结构 (7)
2.3 CAN总线数值的特性 (8)
2.4 CAN协议的报文帧结构形式 (9)
2.4.1 数据帧 (9)
2.4.2 遥控帧 (10)
2.4.3 错误帧 (11)
2.4.4 过载帧 (11)
2.4.5 帧间隔 (11)
2.5 报文接收和仲裁 (12)
2.6 CAN的数据错误检测 (12)
2.6.1 错误处理 (12)
2.6.2 错误状态种类 (14)
2.6.3 错误检测规则 (14)
2.7 位时序 (15)
2.8 本章小结 (16)
3电动车窗的硬件设计 (17)
3.1 主控节点的硬件设计 (17)
3.1.1 微控制器介绍 (17)
3.1.2 CAN模块 (19)
3.2 车窗节点的的设计 (25)
3.3 本章小结 (29)
4基于CAN的车窗控制系统软件设计 (30)
4.1 软件开发的环境 (30)
4.2 CAN模块 (31)
4.2.1 系统主程序 (31)
4.2.2 系统的初始化 (31)
4.2.3 CAN报文的发送 (32)
4.2.4 CAN报文接收 (33)
4.3 驱动模块 (34)
4.4 本章小结 (35)
5车窗防夹功能模拟测试与分析 (36)
6总结与展望 (38)
6.1 总结 (38)
6.2 展望 (38)
参考文献 (39)
致谢............................................... 错误!未定义书签。1绪论
1.1 研究背景
随着计算机技术、网络通讯技术、集成电路技术的飞速发展,以全数字式现场总线为代表的现场控制仪表、设备大量应用在汽车电子上。汽车电子的广泛应用,极大地提高了汽车的安全性、提高了汽车的节能性、改善了汽车的舒适性。在一些机械连接的物理特性达到极限的情况下,汽车性能的提升以及新车型的研发,越来越依赖于汽车电子,汽车领域70%的技术革新来自汽车电子产品。进入2000年以后我国汽车电子市场规模相当可观。2009年我国汽车电子市场总产值已经高达1800亿元,并仍处于快速上升阶段,今年可能会达到5000亿元。可见,我国汽车电子市场经济规模相当可观,而电动车窗控制系统是汽车电子范围内车身控制系统中非常重要的组成部分。因此,对电动车窗的深入研究不仅具有现实
的经济意义,对于增强我国汽车电子企业的竞争力有很大的意义。
汽车电子技术的发展大体分为三个阶段,第一阶段是20世纪60年代至70年代末,其重点是以改善汽车单个零部件的性能为主要目的,代表性的技术创新如利用硅整流代替电刷整流的发电机,利用晶体管无触点点火式代替机械式有触电点火技术,汽车装备电子钟收录机,开始采用电子控制燃油喷射,这些电子系统多由分立电子器件构成,体积大,可靠性不太高。
汽车电子技术发展第二阶段是70年代末至90年代中期,开始引入了自动控制理论,已解决单个机械零部件的各自控制而产生的协调配合上出现的问题。集成电路的发展在汽车上开始应用,这一时期产生如发动机电子管理系统、动力传动总成控制系统、防抱死制动系统、电子控制悬架、电子控制转向系统等,具有一定综合性的电子控制系统。
从90年代中期以来,汽车综合控制技术逐步形成了一个多科学相互交互的综合性新型技术,它以大规模集成电路和总显示控制器局域网为特征,其主要电子产品包括灵巧电源、智能传感器、总线控制器、总线收发器。这些设计一方面将原来的综合性电子控制系统扩大成汽车整体综合控制系统;另一方面与汽车外部道路、交通、通信条件联系起来,使汽车更自动化、智能化。
未来汽车电子化呈现六大趋势:一是功能集成化,如车身控制模块,将取代诸如中控门锁、防盗、雨刮、空调、座椅调节等单项控制系统;二是数字控制取代模拟控制;三是多微处理器协同工作,以实现既有独自运行、又有协同功能的数据共享和灵活组成的优势;四是无线与有线技术相结合,实现车内外信息传输智能化、高速化;五是硬件通用化、高速化,软件专业化,以软件功能提升硬件功能;六是在开发流程上,有“底层向上”模式演变为“由上向下”模式。
1.2 汽车车载网络技术概述
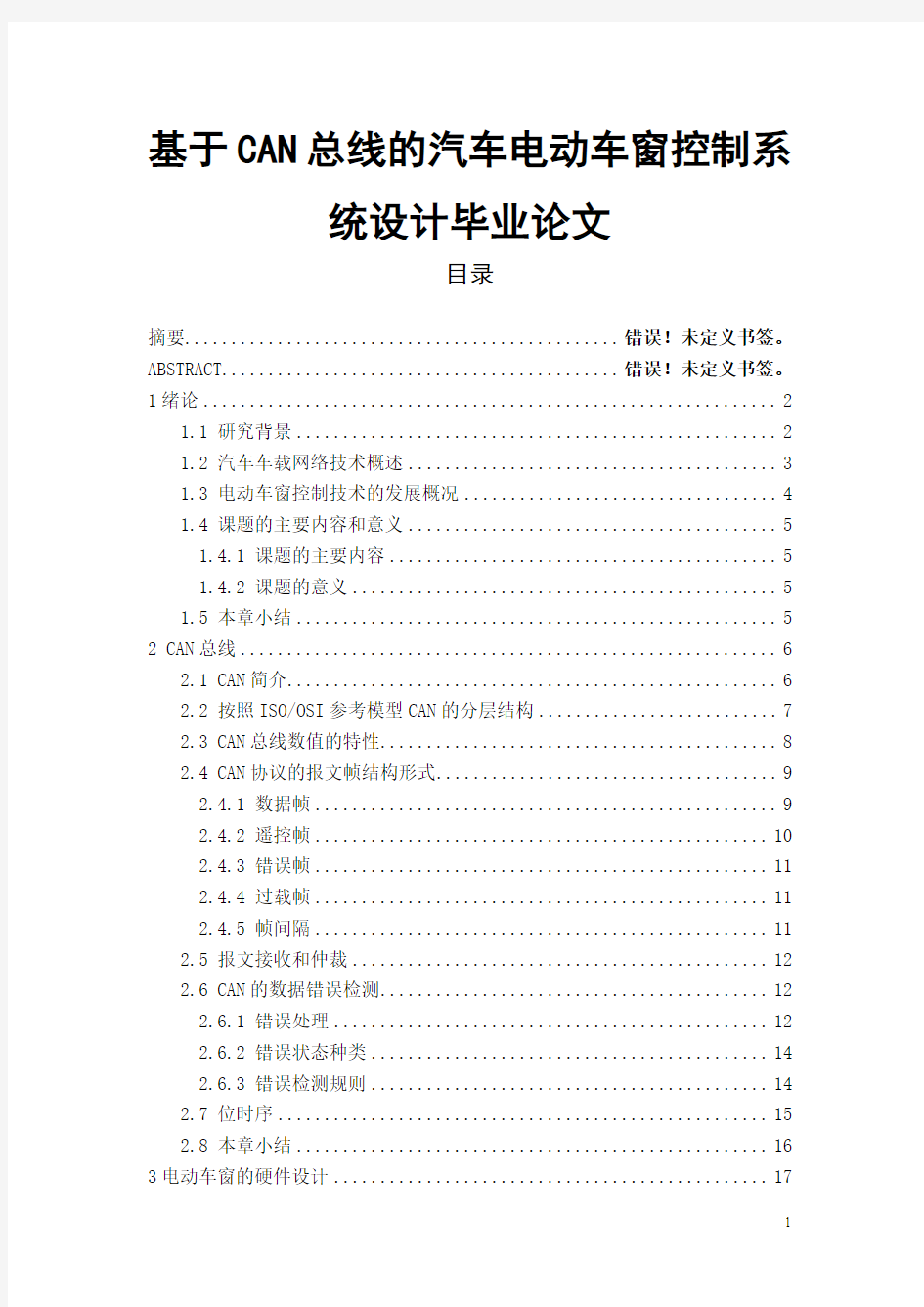
现在人们对汽车的安全性、舒适性、环保节能型等这些性能的要求也越来越高。目前,轿车上装备的各种传感器、执行器和电灯加起来一共多达数百个,其中仅驱动各种物理转动的电机就占一半左右。汽车上电子装置的增加,使连接用的电线束迅速膨胀,导致车体内线束愈来愈复杂,电子设备间的工作协调也越来越困难,为了摆脱这种困境,基于串行通信传输网络结构成为一种必然选择。因此,汽车控制系统网络化已经成为汽车电子今后发展的一个趋势。如图 1.1所示,汽车控制网络可以分为动力总承、底盘控制、车身控制和信息娱乐等子网络。每个子网络包含必要的电子设备,这些电子设备之间通过局域网总线实现通信。对多个次级网络之间的通信来说,就要用到网关,因为这些次级网络对运行速度要求的不同,各个次级网络可以采用各自的协议。在这种体系中,没有全局总线。这种特殊的结构完全消除了全局总线失效的瓶颈,并且为TV,视屏,DVD,
声控功能等增强可靠性,扩展了宽带。对信息娱乐网络来说,就是采用MOST技术;动力总承网络来说就采用Flexray总线,对底盘网络来说,就采用CAN总线。本课题研究的电动车窗系统就是图1-1中车身子网中的一个控制系统。
图1-1 汽车网络系统
1.3 电动车窗控制技术的发展概况
汽车自十八世纪末诞生以来,已经走过了一百多年的时间,在这段时间内,汽车车窗控制技术也有了巨大的变化。十九世纪八十年代,电动车窗逐渐兴起,电动车窗用伺服电机驱动玻璃的升降,取代了传统的转动摇柄升降玻璃,这种控制系统更安全、更便捷、更舒适,更符合人们的需求。
电动车窗的发展经历了两个阶段。第一阶段:这一阶段的电动车窗是一个独立的控制系统,它和驾驶员主控模板之间的连接是靠传统的点对点式连接,和其它控制系统之间没有信息交互。这时的车窗系统灵活性和安全性不高,更增加了维修和维护的难度。第二阶段:这时的电动车窗是搭载于车身控制网络之上的一个智能节点。它和其它控制系统一样,都以一个智能节点的形式搭载于串行总线上。这样整个系统便具备了和其它控制系统的通行能力,既能给其它模块提供信息,也可以从其它模块接受信息,使各个模块共同配合并及时对车窗做出正确控制。
目前,电动车窗是车身控制系统的一个研究热点。车窗控制系统主要是基于LIN总线和CAN总线。LIN总线以其低廉的价格在低端市场占据主导地位,但不能够完全胜任可靠、及时地传递信息,因此更多的是应用CAN总线。基于CAN 总线的车窗控制系统的主要特点是信息的传输速率快、安全性可靠性高。尤其在中、高档汽车的车身控制系统中,由于需要在车身网络传输的信息比较多,且要求车窗控制系统与其它模块通信的实时性较强,LIN总线已经不能满足要求,在这种情况下基于CAN的车窗系统便得到了更广泛的应用。本课题研究的对象就是
基于CAN总线的车窗控制系统。
1.4 课题的主要内容和意义
1.4.1 课题的主要内容
本课题研究的电动车窗控制系统是搭载于轿车车身控制网络的一个应用子系统。我根据电动车窗的功能要求和发展趋势,对基于CAN总线的电动车窗系统的设计,完成了对车窗的上升和下降的控制和防夹功能控制。对电动车窗控制系统完成了硬件设计和软件设计。
1.4.2 课题的意义
CAN总线对车窗系统进行控制有以下几方面的意义:
1、节省材料,系统扩展方便。传统的汽车供电系统线束多,改用多路总线传输系统以后,仅用一根动力线即可,动力线长度节省50%以上,当控制系统需要改变电路时,只要把线束延长即可,方便经济。
2、降低了设计制造成本,延长了使用寿命。
3、提高了系统的可靠性。用两根导线就可以实现车窗所有数据的传输,可靠性得到极大提高。
国内外汽车总线技术的自主开发正在高速发展中。本文所研究的车窗控制、车窗防夹控制对人们对车窗控制舒适性、安全性和操作方便的要求有一定的价值和意义。
1.5 本章小结
本章首先结合我国汽车产业市场规模叙述了汽车电子的产值概况,进而研究了电动车窗控制系统的研究价值,它是汽车电子的重要组成部分。之后,研究了汽车电子发展的一个趋势——网络化,概述了汽车控制网络中的各个子网络的功能和所使用的技术,并且着重说明了总线技术的应用对于汽车电子的重要性和其良好的发展前景。最后,结合电动车窗的发展现状,提出了本课题的主要内容。
2 CAN总线
本章将对CAN总线协议进行详细的阐述。1993年11月ISO正式颁布了CAN 的国际标准ISO11898,之后又追加了颁布了国际标准ISO11519。ISO11898是通过速率为125kbps~1Mbps的高速CAN总线协议标准,而ISO11519是通信速率为0kbps~125kbps的低速CAN总线协议标准。本课题研究的是CAN2.0B协议。
2.1 CAN简介
CAN (Controller Area Network)即控制器局域网,是一种先进的串行通信协议,属于现场总线范围。CAN总线是最初由德国Bosch公司在80年代初期,为了解决现代汽车中众多的控制与测试一起之间的数据交换而开发的一种串行
数据通信协议,目的是通过较少的信号线将汽车上的各种电子设备通过网络连接起来,并提高数据在网络中传输的可靠性,CAN总线具有较强纠错能力,支持差分收发,因而适合高噪声环境,并具有较远的传输距离,特别适合于中小型分布式测控系统,目前己在工业自动化、建筑物环境控制、机床、医疗设备等领域得到广泛应用。CAN总线具有以下几个重要特点:
1、结构简单,只有两根线与外部相连,且内部含有错误探测和管理模块。
2、通信方式灵活。可以多种方式工作,网络上任意一个节点均可在任意时刻主动的向网络上的其他节点发送信息,而不分主从。
3、可以点对点、点对多点及全局广播方式发送和接受数据。
4、网络上的节点信息可分成不同的优先级,可以满足不同的实时要求。
5、CAN通讯格式采用短帧格式,每帧字节数最多为8个,可满足通常工业领域中控制命令、工作状态和测试数据的一般要求。同时,8个字节也不会占用总线时间过长,从而保证了通讯的实时性。
6、采用非破坏性总线仲裁技术。当两个节点同时向总线上发送数据时,优先级低的节点主动停止数据发送,而优先级高的节点可以不受影响继续传输数据,这大大地节省了总线仲裁冲突时间,在网络负载很重的情况下也不会出现网络瘫痪。
7、直接通讯距离最大可达1k0率在5kb/S以下),最高通讯速率可达1Mbps(距离最长为40m)。节点数可达110个,通信介质可以是双绞线、同轴电缆或光导纤维。
8、CAN总线通讯接口中集成了CAN协议的物理层和数据链路层功能,可完成对通信数据的成帧处理,包括位填充、数据块编码、循环冗余检验、优先级判别等项工作。
9、CAN总线采用CRC检验并可提供相应的错误处理功能,保证了数据通信的可靠性。
2.2按照ISO/OSI参考模型CAN的分层结构
CAN协议对应ISO/OSI参考模型的数据链路层和物理层,其按ISO/OSI模型的分层结构如图2-1所示。
图2-1 CAN的分层结构
2.3 CAN总线数值的特性
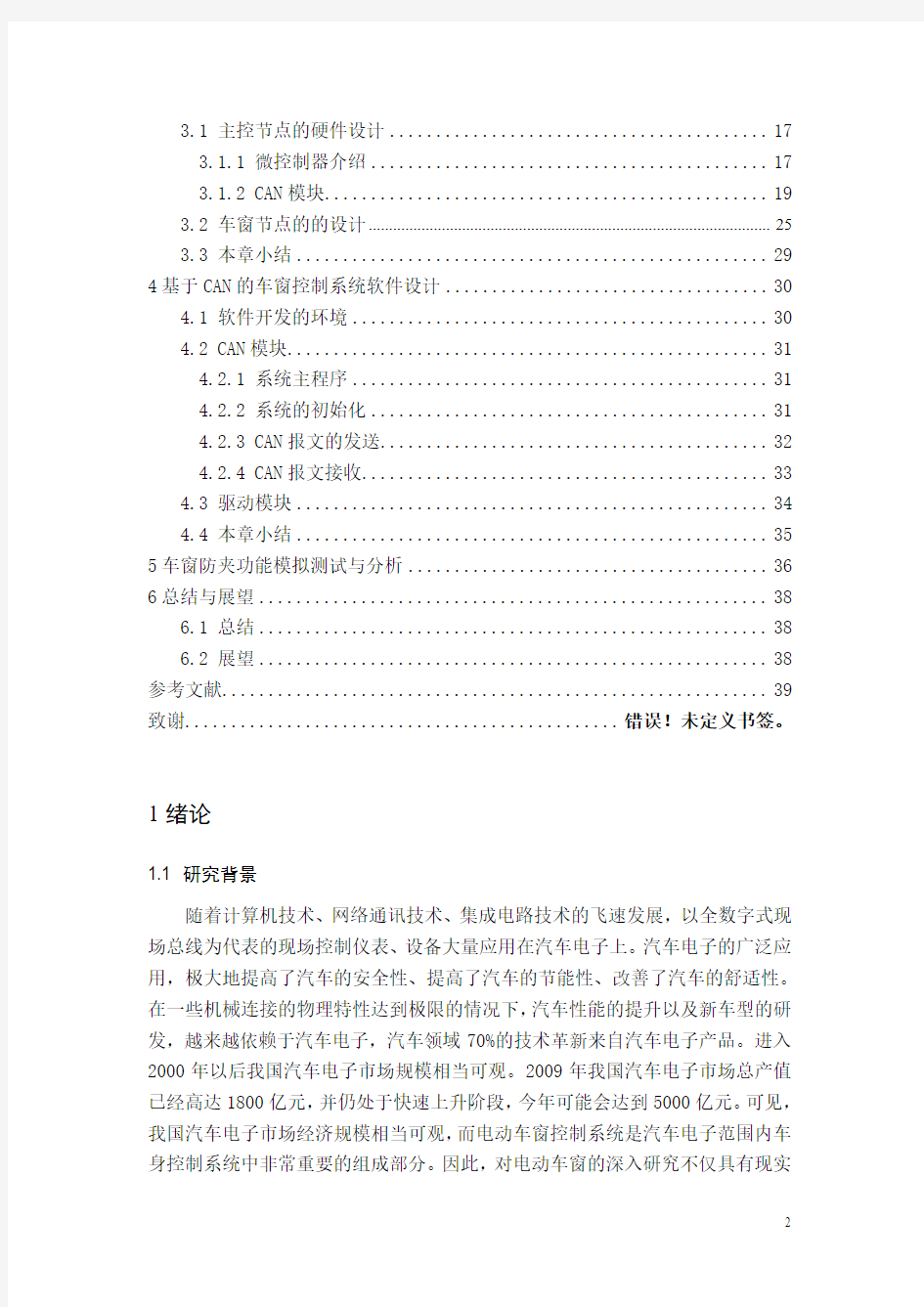
在物理层能使用很多物理介质,例如双绞线、光纤等,最常用的是双绞线。信号使用差分电压传送,两条信号线被成为CAN-H和CAN-L,静态时均是2.5V 左右。CAN-H和CAN-L高表示的逻辑“0”被称作“显性位”; CAN-L比CAN-H 高表示的逻辑“1”被称作“隐性位”。通常电压值为:VCAN-H=3.5V和VCAN-L=1.5V。
CAN总线发送的数据是由隐性位和显性位组成的。“显性”(Dominant)数值表示逻辑0,而“隐性”(Recessive)表示逻辑1。“显性”或“隐性”位同时发送时,最后总线数值将为“显性”。总线位的数值表示如图2-1所示。在“隐性”状态下,VCAN-H和VCAN-L被固定于平均电压点平,Vdiff近似为0。当一个节点发送的是隐性位,而检测到的是显性位,优先级不够高,数据会自动退出;当发送的是显性位而接受到的是隐性位,此节点会认为出错。因而,这种处理的机制就保证了网络中的各个节点在同时发送数据时,优先级低的节点会退出,节
省了大量的仲裁时间,提高了可靠性。
图2-2 CAN总线位的数据值表示
2.4 CAN协议的报文帧结构形式
CAN总线上传输信息的单位是报文,CAN总线的报文有五种不同类型的格式,它们分别是数据帧、遥控帧、错误帧、过载帧和帧间隔。表2-1描述了帧的种类和作用。
表2-1 帧的种类和用途
帧帧用途
数据帧用于发送单元接收单元传送数据的帧。
遥控帧用于接收单元向具有相同ID的发送单元请求数据的帧。
错误帧用于当检测出错误是向其它单元通知错误的帧。
过载帧用于接收单元通知其尚未做好接受准备的帧。
帧间隔用于将数据帧及遥控帧与前面的帧分离开来的帧。
2.4.1数据帧
数据帧由七种不同的位域(Bit Field)组成:帧起始(Start of )、仲裁域(Arbitration Field)、控制域(Control Field)、数据域(Data Field)、CRC域(CRC Field)、应答域(ACK Field)和帧结尾(End of )。数据域的长度可以为0~8个字节。
(1)帧起始(SOF):帧起始(SOF)标志着数据帧和远程帧的起始,仅由一个“显性”位组成。在CAN的同步规则中,当总线空闲时(处于隐性状态),才允许站点开始发送(信号)。所有的站点必须同步于首先开始发送报文的站点的帧起始前沿(该方式称为“硬同步”)。
(2)仲裁域:仲裁域由标识符和RTR位组成,标准帧格式与扩展帧格式的仲
裁域式不同。标准格式里,仲裁域由1l位标识符和RTR位组成。标识符位有ID28~IDl8。扩展帧格式里,仲裁域包括29位标识符、SRR位、IDE(Identifier Extension,标志符扩展)位、RTR位。其标识符有ID28~IDO。为了区别标准帧格式和扩展帧格式,CAN l.0~1.2版本协议的保留位r1现表示为IDE位。IDE 位为显性,表示数据帧为标准格式;IDE位为隐性,表示数据帧为扩展帧格式。在扩展帧中,替代远程请求(Substitute Remote Request,SRR)位为隐性。仲裁域传输顺序为从最高位到最低位,其中最高7位不能全为零。RTR的全称为“远程发送请求(Remote Transmission Request)”。RTR位在数据帧里必须为“显性”,而在远程帧里必须为“隐性”。
它是区别数据帧和远程帧的标志。
(3)控制域:控制域由6位组成,包括2个保留位(r0、r1同于CAN总线协议扩展)及4位数据长度码,允许的数据长度值为0~8字节。
(4)数据域:发送缓冲区中的数据按照长度代码指示长度发送。对于接收的数据,同样如此。它可为0~8字节,每个字节包含8位,首先发送的是MSB(最高位)。
(5)CC校验码域:它由CRC域(15位)及CRC边界符(一个隐性位)组成。CRC 计算中,被除的多项式包括帧的起始域、仲裁域、控制域、数据域及15位为0的解除填充的位流给定。此多项式被下列多项式X15+X14+X10+X8+X7+X4+X3+1除(系数按模2计算),相除的余数即为发至总线的CRC序列。发送时,CRC序列的最高有效位被首先发送/接收。之所以选用这种校验方式,是由于这种CRC 校验码对于少于127位的帧是最佳的。
(6)应答域:应答域由发送方发出的两个(应答间隙及应答界定)隐性位组成,所有接收到确的CRC序列的节点将在发送节点的应答间隙上将发送的这一隐性位改写为显性位。因此,发送节点将一直监视总线信号已确认网络中至少一个节点正确地接收到所发信息。应答界定符是应答域中第二个隐性位,由此可见,应答间隙两边有两个隐性位:CRC域和应答界定位。
(7)帧结束域:每一个数据帧或远程帧均由一串七个隐性位的帧结束域结尾。这样,接收节点可以正确检测到一个帧的传输结束。
2.4.2 遥控帧
和数据帧一样有两种格式,一种是标准遥控帧,另一种是扩展遥控帧。它们都是由帧起始、仲裁场、控制场、CRC场、ACK场和帧结束域这六个场组成。遥控帧的RTR位是隐性位,而且遥控帧没有数据域,所以DLC代码没有意义。
课程设计 题目汽车运动控制系统仿真设计学院计算机科学与信息工程学院班级2010级自动化班 姜木北:2010133*** 小组成员 指导教师吴
2013 年12 月13 日 汽车运动控制系统仿真设计 10级自动化2班姜鹏 2010133234 目录 摘要 (3) 一、课设目的 (4) 二、控制对象分析 (4) 2.1、控制设计对象结构示意图 (4) 2.2、机构特征 (4) 三、课设设计要求 (4) 四、控制器设计过程和控制方案 (5) 4.1、系统建模 (5) 4.2、系统的开环阶跃响应 (5) 4.3、PID控制器的设计 (6) 4.3.1比例(P)控制器的设计 (7) 4.3.2比例积分(PI)控制器设计 (9) 4.3.3比例积分微分(PID)控制器设计 (10) 五、Simulink控制系统仿真设计及其PID参数整定 (11) 5.1利用Simulink对于传递函数的系统仿真 (11) 5.1.1 输入为600N时,KP=600、KI=100、KD=100 (12) 5.1.2输入为600N时,KP=700、KI=100、KD=100 (12) 5.2 PID参数整定的设计过程 (13) 5.2.1未加校正装置的系统阶跃响应: (13) 5.2.2 PID校正装置设计 (14) 六、收获和体会 (14) 参考文献 (15)
摘要 本课题以汽车运动控制系统的设计为应用背景,利用MATLAB语言对其进行设计与仿真.首先对汽车的运动原理进行分析,建立控制系统模型,确定期望的静态指标稳态误差和动态指标搬调量和上升时间,最终应用MATLAB环境下的.m 文件来实现汽车运动控制系统的设计。其中.m文件用step函数语句来绘制阶跃响应曲线,根据曲线中指标的变化进行P、PI、PID校正;同时对其控制系统建立Simulink进行仿真且进行PID参数整定。仿真结果表明,参数PID控制能使系统达到满意的控制效果,对进一步应用研究具有参考价值,是汽车运动控制系统设计的优秀手段之一。 关键词:运动控制系统 PID仿真稳态误差最大超调量
毕业设计(论文) 汽车智能照明控制系统 学生姓名: 学号: 所在系部: 专业班级: 指导教师: 日期:二〇一七年五月
学位论文原创性声明 本人郑重声明:所呈交的学位论文是本人在导师的指导下独立进行研究所取得的研究成果。除了文中特别加以标注引用的内容外,本论文不包含任何其他个人或集体已经发表或撰写的成果作品。本人完全意识到本声明的法律后果由本人承担。 作者签名:年月日 学位论文版权使用授权书 本学位论文作者完全了解学院有关保管、使用学位论文的规定,同意学院保留并向有关学位论文管理部门或机构送交论文的复印件和电子版,允许论文被查阅和借阅。 本人授权省级优秀学士学位论文评选机构将本学位论文的全部或部分内容编入有关数据库进行检索,可以采用影印、缩印或扫描等复制手段保存和汇编本学位论文。 本学位论文属于 1、保密□,在年解密后适用本授权书。 2、不保密□。 (请在以上相应方框内打“√”) 作者签名:年月日 导师签名:年月日
摘要 在当今社会,人们生活得到了极大的提高,汽车拥有量也在不断增加。汽车作为快捷方便的交通工具,给我们的生活带来了诸多方便,同时也带来不少的交通安全问题。汽车照明系统作为现代汽车的必备安全系统之一,在安全性方面有很多值得改进的地方。大部分的汽车的照明系统目前还是以传统手动操作为主,因此,实现汽车照明的智能控制是非常有必要的。 本文首先对汽车智能照明控制系统的研究背景和国内外概况作了简要介绍,给出了设计任务要求和总体设计方案,并根据实际情况做了硬件设计。硬件设计部分包括主控部分、电源设计部分、数据采集部分和模拟车灯控制部分。本设计是通过STM32单片机对传感器采集到的数据进行分析后对模拟车灯进行控制,控制的具体步骤通过软件编程实现。本文还对实物模型的制作流程作了简单介绍,并给出了实物图。最后对现阶段的研究进行总结并得出了结论,最终结论表明该系统在实际应用中是可行的。 关键词:汽车车灯;STM32F103C8T6;传感器
信息科学与技术学院微机原理与接口技术 课程设计报告 题目名称:汽车车灯控制系统 学生姓名:吴权权 学号: 2009082190 专业年级:计科09-1班 指导教师:裘祖旗 时间: 2012-1-12
目录 1.题目及要求 (1) 1.1 题目 (1) 1.2 要求 (1) 2.功能设计 (1) 2.1 汽车图形 (1) 2.2 汽车左转 (1) 2.3 汽车右转 (1) 2.4 汽车前进 (1) 2.5 汽车倒退 (1) 2.6 汽车停止 (1) 2.7 响铃模块 (1) 3.主流程图 (2) 4.详细设计 (3) 4.1 汽车图形显示 (3) 3.2 汽车停止、转向、倒车的指示 (3) 5.结果显示 (4) 5.总结 (7) 6、程序代码 (8)
1.题目及要求 1.1 题目 汽车车灯控制系统 1.2 要求 1)实现停止时的指示灯; 2)实现汽车转向时指示 3)实现倒车指示 4)扩展功能:实现倒车的声音提示 2.功能设计 2.1 汽车图形 功能:用汇编语言在dos下实现一个汽车的图形,和四盏灯。 2.2 汽车左转 功能:按’A’键,实现汽车的左转,左前、左后指示灯亮,右前、右后指示灯灭。 2.3 汽车右转 功能:按’D’键,实现汽车的右转,左前、左后指示灯灭,右前、右后指示灯亮。 2.4 汽车前进 功能:按’W’键,实现汽车的向前行驶,并且四盏指示灯全灭。 2.5 汽车倒退 功能:按’S’键,实现汽车的倒退行驶,并且后面2盏指示灯全亮,前面2盏指示灯全灭。 2.6 汽车停止 功能:按’B’键,实现汽车的停止,并且四盏指示灯全亮和倒车提示音。 2.7 响铃模块 功能:汽车停止时,提供倒车提示音。
大众汽车车载CAN总线系统设计 摘要:随着汽车电子技术的持续发展,汽车上越来越多的应用电子设备,电子控制设备的联系更加复杂,而汽车的传统电气系统一般都是采用点对点的单一通信,联系较少,因此,庞大的布线系统之间的联系已经无法满足逐渐复杂的汽车控制系统的要求。 本文以大众汽车车载CAN总线车身控制系统为研究对象,介绍了国际汽车电子技术的现状和发展趋势,与目前主流的汽车网络技术相比,本文分析了目前流行的现场总线的性能及特点,研究了CAN总线的汽车车身控制系统。介绍了系统的硬件设计和开发过程。说明了每个节点的作用,说明了每个模块硬件电路结构。介绍了系统的软件设计和开发过程。该论文讲述了CAN通信模块的通信流程。通过本设计,大众汽车车载CAN 总线车身控制系统可以满足现代车身控制的需要。 关键词:车载网络;大众汽车车载CAN总线;车身控制系统
Volkswagen car CAN bus system design Abstract: with the continuous development of automobile electronic technology, more and more electronic equipment used in automobile, electronic control equipment is more and more complex, the relation between the traditional auto electrical system is mostly single point to point communication, connect with each other very few, so lead to the connection between the huge wiring system has far cannot satisfy the requirement of increasingly complex auto control system. Automobile LAN CAN bus, which are widely used in automotive electronic control system, in order to realize intelligent and networked control part provides effective ways and methods. This topic with CAN bus body control system as the research object, mainly to do the summary of a few aspects: introduce the current status and development trend of international automotive electronics technology, more mainstream in today's automotive network technology, a comprehensive analysis of the current popular features and performance of a variety of field bus, the further study of the CAN bus car body control system. Describes the hardware design and development of the system. According to the actual needs of the system, the design of each module of the system is determined. Detailed introduces the system function of each control node, describes the main control chip peripheral circuit, light control circuit, CAN communication module circuit, wiper control circuit, control circuit, window lock motor control circuit, the switch quantity detection circuit, electric rearview mirror control circuit hardware circuit for each module of the structure. Describes the software design and development process of the system. This article introduces the communication process for the CAN communication module. Key words: car network; vw vehicle CAN bus; Body control system;
汽 车 自 适 应 前 大 灯 控 制 系 统 设 计 同组成员:。。。 指导教师: 。。。
目录 1前言 (4) 2汽车AFS系统的国内外研究现状 (5) 3自适应前大灯研究的意义 (7) 4汽车自适应前大灯系统总体设计 (8) 4.1 汽车AFS系统的结构组成与基本功能 (8) 4.2 汽车AFS系统的基本原理 (10) 4.3汽车AFS系统建模 (10) 4.3.1线性二自由度汽车模型 (11) 4.3.2前大灯光轴水平方向模型 (11) 4.3.3步进电机模型 (13) 4.3.4前大灯光轴垂直方向调节模型 (13) 4.4PID控制 (14) 4.5云模型控制 (16) 5 汽车AFS控制系统硬件电路设计 (18) 5.1 STC12C5A60AD单片机 (18) 5.2车速信号调理电路 (18) 5.3方向盘转角信号调理电路 (18) 5.4步进电机驱动电路 (19) 5.5电源及断电保护电路 (20) 6汽车AFS控制系统软件设计 (21) 6.1系统软件功能分析 (21) 6.2系统软件设计 (21) 7结论 (23) 摘要:本设计主要完成以传感器作为检测器并通过软件的设计实现适时地对前
大灯灯光调节,从而实现对汽车灯光的自适应控制。这次设计是传感器技术和现代控制技术在汽车制造业中的应用,并且设计了控制系统的硬件电路设计,通过传感器检测到车速和方向盘转角,车身高度的变化,把信号输入单片机中通过程控步进电机执行组件的动作。步进电机的实际转动位置通过位置传感器回馈给MCU,MCU根据不仅电机目标位置与实际位置之差发出调节修正指令,完成调光过程。此设计能免去驾驶员对灯光的反复操作。提高了驾驶安全性和舒适性,减少由于驾驶员对灯光操作及灯光的阴影区多带来的交通事故,也大大挺高了汽车前大灯运行的可靠度。 关键词:汽车、自适应、控制;
: 汽车空调自动控制系统设计 摘要 随着现代汽车技术的发展,汽车的空调技术已经很发展的成熟,可是随着社会的进步,人们对舒适性的要求也越来越来高了。由于人们的要求提高了,从而反应出现代汽车空调系统的几大缺点,需要进行改进。本设计就是根据几大缺点进行的改进设计,设计提供一种8位单片机为控制核心的汽车自动控制系统。 本文针对现代汽车的不足之处进行改进,采用8位单片机为核心,以数字温度传感器、车速传感器、发动机转速传感器作为测量元件,并实时监测、显示车内温湿度、车速和发动机转速,通过控制电路的通断来达到对汽车空调自动控制功能。另外本文还加了一个延时电路,来控制风扇后关闭。本文还阐述了汽车空调及系统的组成及原理,并完成总体硬件设计和软件的编写。 关键词:汽车空调自动控制, 单片机, 传感器 , … 【
目录 ` 1 绪论 (1) 1.1 课题来源及产生背景 (1) 1.2 课题研究的目的及意义 (1) 1.3 课题研究的主要内容 (1) 1.4 本课题的主要任务 (1) 2 汽车空调及空调自动控制系统的概述 (2) 2.1 汽车空调的概述 (2) 2.2 汽车空调自动控制系统的工作原理 (3) ^ 3 汽车自动控制系统的总体设计方案 (4) 4 汽车空调控制系统的设计原则 (4) 5 主要设计硬件的选择 (5) 4.1 单片机AT89S52 (5) 4.1.1 主要性能 (5) 4.1.2 功能特性描述 (5) 4.1.3 引脚结构 (6) ' 4.1.4 方框图 (9) 4.2 数字温湿度传感器DHT11 (11) 4.2.1 DHT11的概述 (11) 4.2.2 传感器性能特点 (11)
实验七 对汽车控制系统的设计与仿真 一、实验目的: 通过实验对一个汽车运动控制系统进行实际设计与仿真,掌握控制系统性能的分析和仿真处理过程,熟悉用Matlab 和Simulink 进行系统仿真的基本方法。 二、实验学时:4 个人计算机,Matlab 软件。 三、实验原理: 本实验是对一个汽车运动控制系统进行实际设计与仿真,其方法是先对汽车运动控制系统进行建摸,然后对其进行PID 控制器的设计,建立了汽车运动控制系统的模型后,可采用Matlab 和Simulink 对控制系统进行仿真设计。 注意:设计系统的控制器之前要观察该系统的开环阶跃响应,采用阶跃响应函数step( )来实现,如果系统不能满足所要求达到的设计性能指标,需要加上合适的控制器。然后再按照仿真结果进行PID 控制器参数的调整,使控制器能够满足系统设计所要求达到的性能指标。 1. 问题的描述 如下图所示的汽车运动控制系统,设该系统中汽车车轮的转动惯量可以忽略不计,并且假定汽车受到的摩擦阻力大小与汽车的运动速度成正比,摩擦阻力的方向与汽车运动的方向相反,这样,该汽车运动控制系统可简化为一个简单的质量阻尼系统。 根据牛顿运动定律,质量阻尼系统的动态数学模型可表示为: ? ??==+v y u bv v m & 系统的参数设定为:汽车质量m =1000kg , 比例系数b =50 N ·s/m , 汽车的驱动力u =500 N 。 根据控制系统的设计要求,当汽车的驱动力为500N 时,汽车将在5秒内达到10m/s 的最大速度。由于该系统为简单的运动控制系统,因此将系统设计成10%的最大超调量和2%的稳态误差。这样,该汽车运动控制系统的性能指标可以设定为: 上升时间:t r <5s ; 最大超调量:σ%<10%; 稳态误差:e ssp <2%。 2、系统的模型表示
一、摘要 2 二、课程设计任务 3 1.问题描述 3 2.设计要求 3 三、课程设计内容 4 1、系统的模型表示 4 2、利用Matlab进行仿真设计 4 3、利用Simulink进行仿真设计 9 总结与体会 10 参考文献 10
本课题以汽车运动控制系统的设计为应用背景,利用MATLAB语言对其进行设计与仿真.首先对汽车的运动原理进行分析,建立控制系统模型,确定期望的静态指标稳态误差和动态指标搬调量和上升时间,最终应用MATLAB环境下的.m文件来实现汽车运动控制系统的设计。其中.m文件用step函数语句来绘制阶跃响应曲线,根据曲线中指标的变化进行P、PI、PID校正;同时对其控制系统建立Simulink进行仿真且进行PID参数整定。仿真结果表明,参数PID控制能使系统达到满意的控制效果,对进一步应用研究具有参考价值,是汽车运动控制系统设计的优秀手段之一。 关键词:运动控制系统 PID仿真稳态误差最大超调量
一、课程设计任务 1. 问题描述 如下图所示的汽车运动控制系统,设该系统中汽车车轮的转动惯量可以忽略不计,并且假定汽车受到的摩擦阻力大小与汽车的运动速度成正比,摩擦阻力的方向与汽车运动的方向相反,这样,该汽车运动控制系统可简化为一个简单的质量阻尼系统。 根据牛顿运动定律,质量阻尼系统的动态数学模型可表示为: ???==+v y u bv v m 系统的参数设定为:汽车质量m =1000kg , 比例系数b =50 N ·s/m , 汽车的驱动力u =500 N 。 根据控制系统的设计要求,当汽车的驱动力为500N 时,汽车将在5秒内达到10m/s 的最大速度。由于该系统为简单的运动控制系统,因此将系统设计成10%的最大超调量和2%的稳态误差。这样,该汽车运动控制系统的性能指标可以设定为: 上升时间:t r <5s ; 最大超调量:σ%<10%; 稳态误差:e ssp <2%。 2.设计要求 1.写出控制系统的数学模型。 2.求系统的开环阶跃响应。 3.PID 控制器的设计 (1)比例(P )控制器的设计 (2)比例积分(PI )控制器的设计 (3)比例积分微分(PID )控制器的设计 利用Simulink 进行仿真设计。 二、课程设计内容 1.系统的模型表示
汽车ECU电路分析 ECU电路解析 正如在本章开始时我们讲到的,不同厂商的汽车电脑在功能上不是完全相同的,但结构组成和要紧功能是差不多一样的,因此我们以有代表性的BOSCH MOTRONIC系统为例进行ECU的电路分析。 1、BOSCH MOTRONIC系统结构图 BOSCH MOTRONIC系统在电子燃油喷射系统中极具代表性,国内生产的大部分车型采纳的差不多上BOSCH电子喷射系统。图5.11为MOTRONIC系统框图,在此图中介绍了曲型电子燃油喷射系统的组成,各部分的联系情况,关于更好的了解电脑的工作过程,以至于分析故障与维修差不多上大有关心的。 图11 Motronic系统框图 1-燃油箱;2-燃油泵;3-燃油滤清器;4-燃油压力调节器;5-燃油脉动衰减器;6-电子操纵单元;7-分电器;8-喷油嘴;9-冷起动喷油嘴;10-节气门;11-节气门开关门;12-空气流量计;13-氧传感器;14-热敏开关;15-水温传感器;16-辅助空气阀;17-曲轴位置传感器;18-主继电器;19-燃油泵继电器
在图11中,电子操纵单元作为电控发动机的核心部分,由一8位/16位单片微机、集成电路和相关电子元件组成,英文表示为Electric control unit简称ECU。其作用是接收各种传感器送来的信息,以它们进行运算、处理、推断后再发出指令信号,经输出电路进行功率放大后驱动想应的执行单元,从而实现对发动机的各种工况的操纵。那个地点提级的ECU是各种操纵单元的统称,ECM/PCM则是发机操纵模组或动力操纵模组的缩写,是包含于ECU范围之内的。 2、BOSCH MOTRONIC1.3电路分析 汽车电子操纵单元(ECU),不论是BOSCH的MOTRONIC,福特的EEC IV、V,通用的P4、P6等,其最终的目的只有一个,让发动机工作的更出色,表现为动力更强劲,噪声小,污染低。这是针对发动机系统而言,其他系统也是一样,每个系统都有自己的目标,这就看起来是电视机一样,世界各国生产的电视机,不管是哪个厂家的,差不多上要以接收电视节目为目的。基于如此一种认识,我们能够把ECU抽样化的分成几个部分,见图12所示。
1绪论 1.1选题背景与意义 汽车已经成为人们日常生活不可缺少的代步交通工具,在汽车发达国家,旅客运输的60%以上,货物运输的50%以上由汽车来完成,汽车工业水平和家庭平均拥有汽车数量已经成为衡量一个国家工业发达程度的标志。进行汽车运动性能研究时.一般从操纵性、稳定性和乘坐舒适性等待性着手。但近年来.随着交通系统的日趋复杂,考虑了道路环境在内的汽车运动性能开始受到关注。因此,汽车运动控制系统的研究也显得尤为重要,在文中,首先对汽车的运动原理进行分析,建立控制系统简化模型,确定期望的静态指针(稳态误差)和动态指针(超调量和上升时间)。然后对汽车运动控制系统进行设计分析。从而确定系统的最佳静态和动态指针。 2 论文基本原理分析 2.1.1汽车运动横向控制 (1)绝对位置的获得方法 汽车横向方向的控制使用GPS(全球定位系统)的绝对位置信息。GPS信息的精度与采样周期、时间滞后等有关。为提高GPS的数据精度和平滑数据.采用卡尔曼滤波对采样数据进行修正。GPS的采样周期为200ms相对应控制的周期采用50ms。另外考虑通信等的滞后、也需要进行补偿,采用航位推测法(dead reckoning)解决此问题。通过卡尔曼滤波和航位推测法推算出的值作为汽车的绝对位置使用来控制车速、横摆角速度等车辆的状态量。GPS 的数据通过卡尔曼滤波减少偏差、通过航位推测法进行误差和迟滞补偿.提高了位置数据推算的精度。 (2)前轮转角变化量的算出方法 这里对前轮目标转角变化量(?δ)的算出方法作简要说明,横方向控制采用预见控制,可以从现在汽车的状态预测经过时间t p秒后的汽车位置,由t p秒后的预测位置和目标路径
实训报告 实训项目名称汽车空调控制系统 所属课程名称实训 实训日期 2015年1月5日~1月16日专业电子信息工程 班级电信12-1班 学号 姓名 成绩 工程实训
【实践目的及要求】 (1)学习怎样使用keil4以及AltiumDesignerSummer9软件; (2)学习设计汽车空调系统; (3)在设计过程中,完成如何利用软件实现仿真; (4)基于AT89C52控制3相6拍步进电动机,压缩机,4X4键盘,LCD 显示,DS18B20温度传感器,风机调速模块、鼓风机来实现汽车空调智能控制 【实践原理】 汽车空调系统是应用于汽车上的普遍的一个系统,而本次实训的目的就是实现汽车空调系统的基本功能,由于条件有限本次实训只是做出了一个基本的模型,他的基本原理是基于AT89C52芯片控制4X4按键、控制步进电机和鼓风机的制冷制热过程,读取安装在车、车外和蒸发器上的三个DS18B20温度传感器的实时感应三点温度,传到LCD显示车外温度。通过LCD 显示的菜单容来进行“制冷”、“制热”以及“自动调节”和“返回”来自己或者自动控制汽车室温度。 (一)、AT89C52的基本功能和参数指标 AT89C52是一个低电压,高性能CMOS 8位单片机,片含8k bytes的可反复擦写的Flash只读程序存储器和256 bytes的随机存取数据存储器(RAM),器件采用ATMEL公司的高密度、非易失性存储技术生产,兼容标准MCS-51指令系统,片置通用8位中央处理器和Flash存储单元。具体见图1。 图1 AT89C52单片机
汽车空调系统的主要模块有4X4键盘、LCD显示、DS18B20温度传感、3相6拍步进电机、压缩机以及风机调速模块控制下的鼓风机等,下面介绍上述各模块。 1.4X4键盘 4X4键盘的“5”“6”“7”“8”分别控制“制冷”“制热”“自动”“返回”。“1”对应“目标温度”即自己想要达到的温度。“2”和“3”则是对应目标温度的加减。具体见图2 图2 4X4键盘模块 2.LCD显示 车、车外和蒸发器上的三个DS18B20温度传感器的实时感应温度通过芯片显示在LCD上,还有我们根据实时温度需要做出一系列的操作,我们的操作指令也会显示在LCD上。由于ADS库没有LCD显示的器件,所以在这里我用LED的显示来代替。具体见图3。 图3 LCD显示模块
信息科学与技术学院微机原理与接口技术课程设计报告 题目名称:汽车车灯控制系统
目录 1.题目及要求 (1) 1.1 题目 (1) 1.2 要求 (1) 2.功能设计 (1) 2.1 汽车图形 (1) 2.2 汽车左转 (1) 2.3 汽车右转 (1) 2.4 汽车前进 (1) 2.5 汽车倒退 (1) 2.6 汽车停止 (1) 2.7 响铃模块 (1) 3.主流程图 (2) 4.详细设计 (3) 4.1 汽车图形显示 (3) 3.2 汽车停止、转向、倒车的指示 (3) 5.结果显示 (4) 5.总结 (7) 6、程序代码 (8)
1.题目及要求 1.1 题目 汽车车灯控制系统 1.2 要求 1)实现停止时的指示灯; 2)实现汽车转向时指示 3)实现倒车指示 4)扩展功能:实现倒车的声音提示 2.功能设计 2.1 汽车图形 功能:用汇编语言在dos下实现一个汽车的图形,和四盏灯。 2.2 汽车左转 功能:按’A’键,实现汽车的左转,左前、左后指示灯亮,右前、右后指示灯灭。 2.3 汽车右转 功能:按’D’键,实现汽车的右转,左前、左后指示灯灭,右前、右后指示灯亮。 2.4 汽车前进 功能:按’W’键,实现汽车的向前行驶,并且四盏指示灯全灭。 2.5 汽车倒退 功能:按’S’键,实现汽车的倒退行驶,并且后面2盏指示灯全亮,前面2盏指示灯全灭。 2.6 汽车停止 功能:按’B’键,实现汽车的停止,并且四盏指示灯全亮和倒车提示音。 2.7 响铃模块 功能:汽车停止时,提供倒车提示音。
3.主流程图 No Yes Yes RET No Yes RET No Yes RET No Yes RET No Yes RET No 非定义字符 RET Yes 开始 与W 比较 有无按健 退出 等待 与A 比较 与D 比较 调用DRAW_W 调用DRAW_A 调用DRAW_D 与S 比较 调用DRAW_S 和响铃函数 与B 比较 调用STOP 与空格比较
第一章概述 1完成本次循环工作后,停止在最初位置。其运动路线示意图如下图1-1所示。 如图1-1 小车运动路线示意图 第二章硬件设计 2.1 主电路图 如图2-1为小车循环控制的主电路原理图。该电路图利用两个接触器的主触点KM1、KM2分别接至电机的三相电源进线中,其中相对电源的任意两相对调,即可实现电机的正反转,也可达到小车左右运行的目的。假设接通KM1为正转(小车右行),则接通KM2为反转(小车左行)。
图2-1小车循环控制的主电路原理 2.2 I/O地址分配 如表2-1为小车循环运动PLC控制的I/O分配表。在运行过程中,这些I/O口分别起到了控制各阶段的输入和输出的作用,并且也使小车的控制过程更清晰明了,动作与结果显示更加方便直接。 表2-1
2.3 I/O接线图 如图2-2为小车循环运动PLC控制的I/O接线图。在进行调试过程时,在PLC模块上,当I0.0有输入信号,即按下SQ1;当I0.1有输入信号,也即按下SQ2,以此类推,I/O接线图就是把实际的开关信号变成调试时的输入信号。同理,输出信号也是利用PLC模块把小车的实际运动用Q0.0、Q0.1的状态表现出来。 图2-2小车循环运动PLC控制的I/O接线图 2.4 元件列表 如表2-2为小车循环运动PLC控制的元件列表。在本次设计中就是利用这些元件,用若干导线连接起来组成了我们需要的原理图、I/O接线图。 表2-2
第三章软件设计 3.1 程序流程图 如图3-1为小车循环运动PLC控制的程序流程图。小车在一个周期内的运动由4段组成。设小车最初在左端,当按下启动按钮,则小车自动循环地工作,若按下停止按钮,则小车完成本次循环工作后,停止在最初位置。 首先小车位于初始位置,按下SB1启动后,小车向右行驶;当碰到行程开关SQ4,小车转向,向左行驶;碰到行程开关SQ2,小车再一次转向,向右行驶;碰到行程开关SQ3,小车又向左行驶,直到再次碰到SQ1,然后开始依次循环以上过程。若不按下停止按钮SB2则小车一直进行循环运动,若此时按下停止按钮SB2,小车又碰到行程开关SQ1,则小车回到初始位置。
电动汽车控制系统设计设计
摘要 在当前全球汽车工业面临金融危机和能源环境问题的巨大挑战的情况下,发展电动汽车,利用无污染的绿色能源,实现汽车能源动力系统的电气化,推动传统汽车产业的战略转型,在国际上已经形成了广泛共识。 本课题以电动汽车他励电机控制器为例,以实现电动汽车的加、减速,起、制动等基本功能以及一些特殊情况下的处理。以开发出高可靠性、高性能指标、低成本并且具有自主知识产权的电动汽车电机驱动控制系统为目的。主要包括硬件电路板的设计,以及驱动系统的软件部分的仿真调试。 在驱动系统硬件设计中,这里主控制芯片采用ATMEL公司的ATmega64芯片。功率模块采用多MOSFET并联的方 37
式,有效的节约了成本。电源模块采用基于UC3842的开关电源电路。选用IR 公司的IR2110作为驱动芯片,高端输出驱动电流可到1.9A,低端输出驱动电流可到2.3A,能够提供7个MOSFET并联时驱动电流。对于电流检测模块,本文没有采用电流传感器或者是康铜丝,而是采用了一种基于MOSFET管压降的电流检测电路,这种方式即节约了成本也保证了检测精度。 驱动系统的软件设计中,主要实现的功能为:开关量的检测处理,故障检测,串口通讯,励磁、电枢控制,报警功能等。针对他励电机电动汽车的控制特性,提出了节能控制算法和最大转矩控制算法,用于提高电动汽车的续航里程和加速性能。 他励直流电动机驱动系统能够很 37
好的运行在电动汽车上,性能可靠、结构简 单,并且节约了成本,使电动汽车的性价比大大提高,有利于电动汽车的普及。 关键词:电动汽车,ATmega64,他励直流电机,PID模糊控制 37
郑州科技学院 《数字电子技术》课程设计 题目车灯控制系统的设计 学生姓名 专业班级 学号 院(系) 指导教师 完成时间 2016年月日
目录 1课程设计的目的 (1) 2课程设计的任务与要求 (1) 2.1设计任务 (1) 2.2设计要求 (1) 3设计方案与论证 (2) 3.1设计分析 (2) 3.2 设计方案简介 (3) 4设计原理及功能说明 (3) 4.1 设计系统的组成 (3) 4.2 系统的工作原理 (3) 5单元电路的设计(计算与说明) (4) 6硬件的制作与调试 (6) 7总结 (8) 参考文献 (10) 附录1:总体电路原理图 (11) 附录2:实物图 (12) 附录3:元器件清单 (13)
1 课程设计的目的 汽车技术的发展趋势是电子化、智能化、信息化和集成化当前国际汽车市场上,汽车电子化竞争非常激烈,电子控制系统的应用十分普遍。统计数据表明,在国外著名汽车制造厂商中,每辆汽车平均消耗电子产品费用占整车的百分之三十左右,其中光微处理器多达五十多个,越是高档汽车电子化程度越高。汽车电子最显著特征是向控制系统化推进。用传感器、微处理器MPU、执行器、数十甚至上百个电子元器件及其零部件组成的电控系统,正获得极其广泛的市场。汽车未来的发展趋势是:用电化学替代燃烧学,电子技术的比重将超过机械技术的比重(电子化),系统的运行由控制器群自动控制(智能化),控制群间的网络平台支持系统运行(信息化),采用高效紧凑的模块化设计(集成化和模块化)。 通过实验可以实现以学生自我训练为主的教学模式,更好的掌握试验原理、操作方法、步骤,全面了解仪器设备的性能并正确的使用仪器,锻炼学生思考问题、分析问题和解决问题的能力,提高学生的创新思维和实际动手能力,提高学生驾驭知识的能力,培养学生实事求是的科学态度,百折不挠的工作作风,相互协作的团队精神,勇于开拓的创新意识。通过开展这项工作,将有利于培养社会所需要的高素质、创新型人才。 2 课程设计的任务与要求 2.1设计任务 设计一个汽车灯光控制电路,用四个发光二极管模拟汽车左转弯尾灯、右转弯尾灯、刹车尾灯和夜间大灯,用开关选择控制汽车正常运行、左转弯、右转弯和刹车时尾灯的情况。 2. 2设计要求
汽车ECU电路分析ECU电路解析 正如在本章开始时我们讲到的,不同厂商的汽车电脑在功能上不是完全相同的,但结构组成和主要功能是基本一样的,因此我们以有代表性的BOSCHMOTRONIC系统为例进行ECU的电路分析。 1、BOSCH MOTRONIC系统结构图 BOSCH MOTRONIC系统在电子燃油喷射系统中极具代表性,国内生产的大部分车型采用的都是BOSCH电子喷射系统。图5.11为MOTRONIC系统框图,在此图中介绍了曲型电子燃油喷射系统的组成,各部分的联系情况,对于更好的了解电脑的工作过程,以至于分析故障与维修都是大有帮助的。 图11Motronic系统框图 1-燃油箱;2-燃油泵;3-燃油滤清器;4-燃油压力调节器;5-燃油脉动衰减器;6-电子控制单元;7-分电器;8-喷油嘴;9-冷起动喷油嘴;10-节气门;11-节气门开关门;12-空气流量计;13-氧传感器;14-热敏开关;15-水温传感器;16-辅助空气阀;17-曲轴位置传感器;18-主继电器;19-燃油泵继电器在图11中,电子控制单元作为电控发动机的核心部分,由一8位/16位单片微机、集成电路和相关电子元件组成,英文表示为Electric control unit 简称ECU。其作用是接收各种传感器送来的信息,以它们进行运算、处理、判断后再发出指令信号,经输出电路进行功率放大后驱动想应的执行单元,从而实现对发动机的各种工况的控制。这里提级的ECU是各种控制单元的统称,ECM/PCM则是发机控制模组或动力控制模组的缩写,是包含于ECU范围之内的。 2、BOSCH MOTRONIC1.3电路分析 汽车电子控制单元(ECU),不论是BOSCH的MOTRONIC,福特的EEC IV、V,通用的P4、P6等,其最终的目的只有一个,让发动机工作的更出色,表现为动力更强劲,噪声小,污染低。这是针对发动机系统而言,其他系统也是一样,每个系统都有自己的目标,这就好像是电视机一样,世界各国生产的电视机,无论是哪个厂家的,都是要以接收电视节目为目的。基于这样一种认识,我们可以把
毕业教学环节成果 (2012 届) 题目智能小车速度测量控制系统设计学院信息工程学院 专业电气自动化技术 班级 学号 姓名 指导教师 2012年5月17日
目录 摘要 (1) 英文摘要 (1) 引言 ................................................................. - 2 -1 方案设计与论证 .. (3) 1.1 主控系统 (3) 1.2 电机驱动模块 (3) 1.3 测速模块 (4) 1.4 显示模块 (4) 2 系统的硬件电路 (4) 2.1 总体设计 (4) 2.2 单片机控制系统设计 (5) 2.3 电机驱动电路设计 (6) 2.4 LCD显示电路设计 (7) 2.5 键盘电路设计 (8) 2.6 测速电路设计 (8) 2.7 电源电路设计 (8) 3 系统软件设计 (9) 3.1 测速程序 (10) 3.2 显示程序 (10) 4 调试 (12) 结论与谢辞 .......................................................... - 13 -参考文献 ............................................................ - 14 -附件1.程序清单..................................................... - 15 -附件2.整体原理图................................................... - 23 -
《单片机原理与应用》 课程大作业 项目名称:汽车灯光控制系统 专业班级:智能监控121 学号: 120516127 姓名:朱小柳 连云港职业技术学院信息工程学院 2013 年10 月27 日
随着单片机的日益发展,其应用也越来越广泛,通过对“汽车灯光控制系统”设计,可以对单片机的知识得到巩固。本设计是设计一个单片机控制系统。在汽车进行左右转向灯、前主灯、倒车灯、故障灯时,实现对各种信号指示灯的控制。本设计主要是对单片机的并行输入、输出口电路的应用,通过对I/O口控制发光二极管的亮、灭、闪烁,加上一些复位电路、按键电路、驱动电路来模拟汽车尾灯的功能。 关键词单片机;汽车信号灯;电路基础;
车灯是行车安全的必备件,除了具有照明作用,对行人和其他车辆还具有转向、会车、刹车等警示作用。其中汽车转向灯的控制就是一例。汽车转向和报警信号灯是汽车运动方向和车身状态的表示信号,关系着汽车的安全问题,因此基于单片机的汽车转向灯控制器的一直以来都是汽车电子设计中的一个十分重要的领域。 此次基于单片机的汽车转向灯的设计中,复位电路的设计、LED发光二极管的应用、4个按键开关、键盘扫描来控制LED灯点亮的方式都基本符合课程设计的要求。其中复位电路的作用是当单片机死机的情况下用来复位重启单片机,软件部分主要是用键盘扫描的方式来与程序中的设定值比较如果一致就执行该段子程序来实现LED的点亮方式。 汽车上的信号灯有:转向灯(左前灯、右前灯、仪表盘上的二个指示灯)。当汽车转弯、倒车、停靠时,转向灯发出不同的信号。目前国内广泛使用电热式闪光器产生闪光信号。闪烁频率在 50~110 次/ min,但是一般控制在 60~95 次min 之间。闪光器是通过调节镍铬丝的拉力和触点的间隙来满足频率要求的,灯泡功率的大小也会影响闪烁频率。因此在更换闪光器或灯泡时调整比较困难。同时,系统没有故检测,驾驶员无法知道车外的转向灯及示宽灯是否点亮,从而影响行车安全。到目前为止,我们还没有发现能检测灯丝断这种故障的有效方法。针对上述问题,我们用AT89C51单片机设计了一套汽车信号灯控制系统。用LED产生闪光信号,同时能自动检测信号灯故障。信号灯灯具的发展是随着汽车制造技术及电光源技术的发展而逐步完善的。它经历了机油(或煤油)灯、乙炔气灯到电光源灯的发展历程。现代汽车信号灯灯具已经开始使用发光二极管(LED)技术以及光导技术,这是信号灯灯具的一次飞跃。
2010年(第32卷)第1期 汽车工程 AutomotiveEngineering2010(V01.32)No。1 汽车CAN总线数字组合仪表设计木 2010019 曹晓琳1,王登峰1,车晓镭1,倪莹祥1,阮邵范2,宋连彬2 (1.吉林大学,汽车动态模拟国家重点实验室,长春130022;2.四平慧宇仪表电气有限公司,四平136001) [摘要】设计了CAN总线、步进电机驱动、液晶显示驱动和挡位与警示灯控制等仪表核心电路模块,完成了整个组合仪表硬件的研发,并编制了仪表的控制软件。检测结果表明,仪表指针指示正确、稳定,里程、报警和挡位显示准确。 关键词:汽车;CAN总线;数字仪表;设计 DesignofCANBus—basedAutomotiveDigitalClusterInstrument CaoXiaolinl,WangDengfen91,CheXiaoleil,NiYingxian91,RuanShaofan2&SongLianbin21.埘讯University,State研LaboratoryofAutomotiveDynamicSimulation,Changchun130022; 2.脚f昭HuiyuElectricInstrumentCo.,Ltd.,S/p/ng136001 [Abstract]Thecorecircuitmodulesofinstrumentaredesigned,includingmodulesforCANbus,steppermotordrive,liquid-crystaldisplaydriveandgearpositionindicator/alarmLEDscontrol,SOthehardwareandsoft?waredevelopmentofthewholeclusterinstrumentarecompleted.Thetestresultsshowthatthepointersofinstrumentindicatecorrectlyandstably,andthemileage,gearpositionandalarmLEDsdisplayaccurately.Keywords:vehicle;CANbus;digitalinstrument;design 日IJ舀 汽车仪表是汽车工作状态的信息显示中心,是驾驶员与汽车进行信息交流的平台,是保证汽车安全行驶的关键零部件之一…。近年来随着微电子技术、控制技术、网络通信技术的发展,CAN总线协议在车载电控系统中得到了广泛应用,因此汽车仪表可通过CAN总线直接在总线网络上读取所需的输人信号,无须专门布置传感器,从而可使汽车仪表系统得到大大简化,同时也显著降低了仪表的成本。因此,将CAN总线通信应用于汽车仪表已成为发展的必然趋势¨。-。 作者将CAN总线技术应用于汽车数字式组合仪表的开发,使仪表所需的发动机转速、车速、水温、挡位、警示信息等主要显示信号均通过其它车载电控系统的CAN协议接口直接读取,避免现有汽车数字式仪表每个信号均采用传感器到仪表点对点的信号获取与传输方式带来汽车线束多、质量大、故障率高的不足,减少了传感器和汽车线束的数量,降低了仪表成本,提高了系统工作可靠性。设计研制出了CAN总线数字仪表样品,并进行相应的试验验证。 1硬件设计 根据CAN2.0协议,采用4路CAN总线信号,可从CAN总线上接收到来自整车其它电控单元(ECU)的CAN信号,将标识符为240H的数据帧定义为发动机故障、制动器ABS故障、电瓶电量低和安全带未系等4个报警灯;标识符为280H的数据帧定义为转速表和水温表;标识符为2COH的数据帧定义为车速表和里程表;标识符为300H的数据帧定义为挡位信号。 硬件电路以飞思卡尔公司的MC9S12HZ256为 牵吉林省汽车产业发展专项基金(2006003)和长春市科技支撑计划项目(08KZl4)资助。