
1、填空题
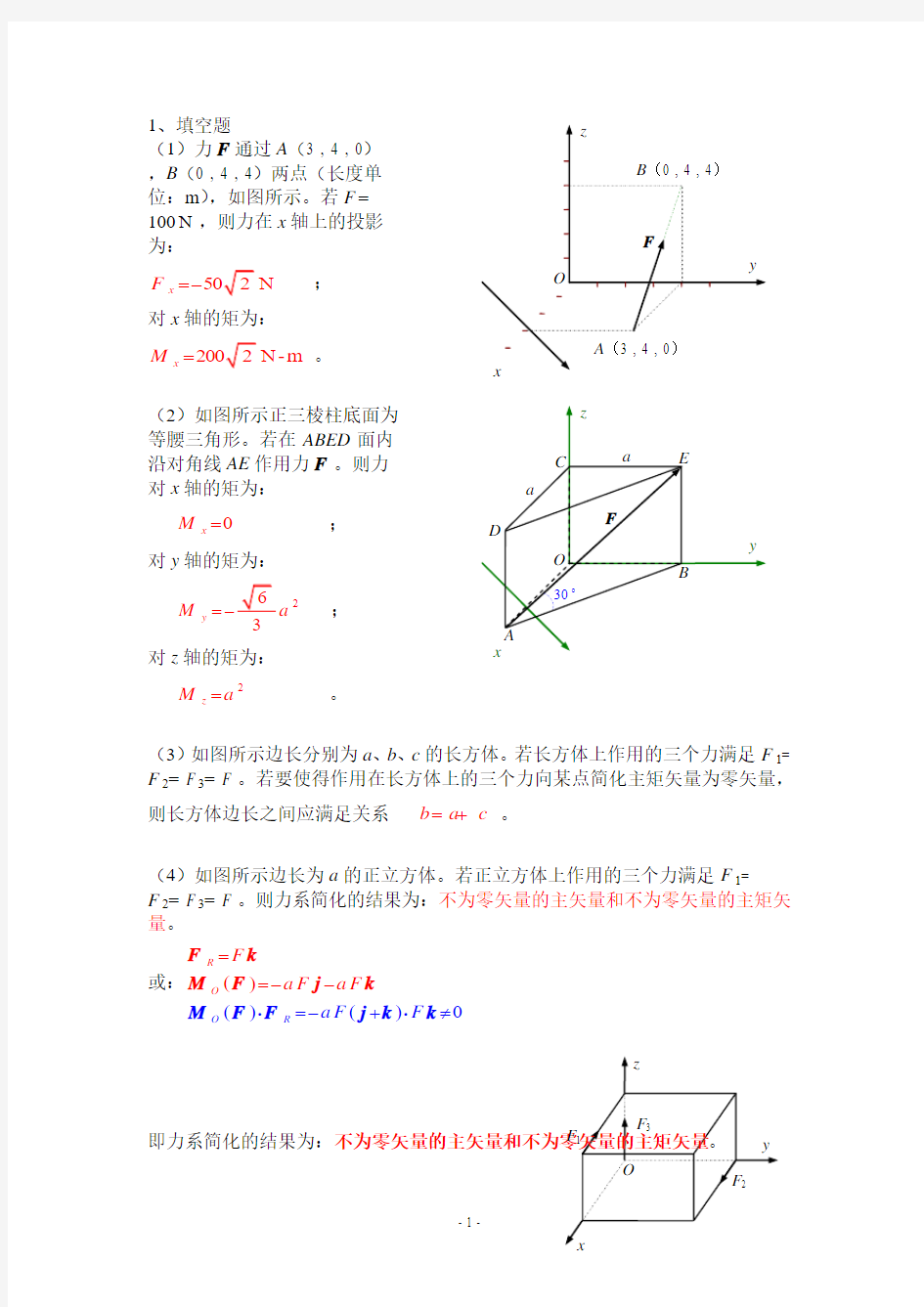
(1)力F 通过A (3 , 4 , 0) ,B (0 , 4 , 4)两点(长度单 位:m ),如图所示。若F = 100 N ,则力在x 轴上的投影 为:
502N x F =- ; 对x 轴的矩为:
2002N-m x M = 。
(2)如图所示正三棱柱底面为 等腰三角形。若在 ABED 面内 沿对角线AE 作用力F 。则力 对x 轴的矩为:
0x M = ; 对y 轴的矩为:
2
63y M a =- ;
对z 轴的矩为:
2z M a = 。
(3)如图所示边长分别为a 、b 、c 的长方体。若长方体上作用的三个力满足F 1= F 2= F 3= F 。若要使得作用在长方体上的三个力向某点简化主矩矢量为零矢量,则长方体边长之间应满足关系 b a c =+ 。
(4)如图所示边长为a 的正立方体。若正立方体上作用的三个力满足F 1= F 2= F 3= F 。则力系简化的结果为:不为零矢量的主矢量和不为零矢量的主矩矢量。
或:(()()0
)O R R O a F F F a F a F =-+=≠=--F k
M F F j k M F j k
k ??
即力系简化的结果为:不为零矢量的主矢量和不为零矢量的主矩矢量。
y
z
x
F
O
A (3 , 4 , 0)
B (0 , 4 , 4)
y
z x
O
a a
30 o
A
B
C D
E
F
y z
F 1 F 2
F 3
O
2、选择题
(1)如图所示边长为a 的正立方体框架,若沿对角线AB 作用F 1= F ,沿CD 作用F 2 = 3/3F 。则此力系向O 点简化的主矩矢量的大小为(D )
A .
6F a
B .3F a
C .
6/6F a
D .3/3F a
(2)如图所示。力F 的作用线在OABC 面内。则F 对坐标轴x 、y 、z 轴之矩为(B )
A .()0;()0;()0x y z M M M ≠≠≠F F F
B .()0;()0;()0x y z M M M ≠≠=F F F
C .()0;()0;()0x y z M M M ≠=≠F F F
D .()0;()0;()0x y z M M M =≠≠F F F
(3)如图所示沿六个棱边作用大小相等力F 的正立方体。则该力系简化的最终结果为(D )
A .主矢量
B .平衡
C .主矩矢量
D .力螺旋
显然结论D 正确。
F 1
F 2
O
A B C
D
x
y
z
O
A
B
C
F β
α
y x z
F 6
F 1
O D F 2 F 3 F 4
F 5
(4)如图所示沿六个棱边作用大小相等力F 的正立方体。则该力系向一点简化的最终结果为(D )
A .主矢量为零矢量,主矩矢量不为零矢量。
B .主矢量不为零矢量,主矩矢量不为零矢量。
C .主矢量不为零矢量,主矩矢量为零矢量。
D .主矢量为零矢量,主矩矢量为零矢量。
显然结论D 正确。 4、如图所示A 端固定刚架。已知均布载荷q 作用在平面内,分布集度q = 4 kN / m ;集中力F 1、F 2分别于x 、y 轴平行,且F 1 = 10 kN ,F 2 = 12 kN 。试求固定端A 处的约束反力。
解:
(1)受力分析:(如图所示)
(2)平衡方程:
1221120:00:00:40
0:5800:500:430x Ax y A y z Az x x y y z z F F F F F F F F q M M F q M M F M M F F ?=-=??
=-=??=-=???=+-=??
=-=??=++=??∑∑∑∑∑∑
(2)联立求解平衡方程:
10kN 12kN 16kN
28kN -m 50kN -m 76kN -m A x A y A z x y z F F F M M M ?=?
=??
=??=-?
=??
=-?
y x z
F 6
F 1 O D
F 2 F 3 F 4
F 5
y
x
z
5 m
4 m
3 m q
F 1
F 2
A
y
z
5 m
4 m
3 m
q
F 1
F 2
A
F A z M A x
5、如图所示扒杆。竖杆AB 由绳EB 、GB 、HB 及CED 杆和固定铰支座约束。试求 两绳GB 、HB 拉力和固定铰 支座A 处的约束反力。 解:
(1)受力分析:(如图所示)
(2)平衡方程联立求解:
202k 53
m 3()0:
35220022
()0:
N 28.284kN 202kN 28.2843522k 0N
2
AH
G AG
H G H F AG AH M
F A
G M
F AH F ----
----
----
----
====
=-?===-==∑∑F F
o o o
o o o
o o
o o
0:
cos 60cos 45cos 60cos 450
0:
cos 60sin 45cos 60sin 4500:0
2
(202)20kN 2
203(202)68.990k 20cos30os N
c 300x
Ax G H
y
A y G H
z A x
A y Az G
z
H A F F
F
F F F F
F F F F F F F
F =-+==--==-++===
?==+?=∑∑∑
3m
60 o
60
o 45 o
45
o 2m
2m
3m B
A
C
E
D
20kN G H
z y x
3m
60 o
60 o 45 o
45
o 2m
B
A C
G H
z y
x
F G
F H F A x
F A y
F A z
2m
3m E
D
20kN
45 o
6、如图所示起重机装置。电动机以转矩 通过皮带传动起吊重物。若r =10 cm ,R = 20 cm ,G =10 kN ,F 1 =
2 F 2 。试求平 衡状态时轴承A 、B 处的约束反力和皮带 的拉力。 解:
(1)受力分析:(如图所示)
(2)平衡方程联立求解:
21o 212o
12
o 121()0:
1020()0()0:
1000300600()sin 300
()0:
1000600()cos300()0:1000700400()sin 300
()05kN 10kN
1.5kN
93
kN 7.794kN 2
6kN
:
y x
B z
z
B x B
C A z
B D
B z
B x A z
M G F F M
F
G F F M
F
F F F
F
F
F F M F
G F F M
====+-==-+-==--+==-+-=-
=-=-==∑∑∑∑∑F F F F F o
121000400()cos3033kN 196k 0
5.N
A A x
x
F F F F
=-=-++=
30 o
30 o 300
300
400
F 1 F 2
M
x
y
z
G r
R
F A x
A
O
B F A z F B z F B x
C
D
30 o
30 o 300 300 400
F 1 F 2
M
x
y
z
G r
R A
O
B
7、均质等厚矩形板重200 N ,角 A 和角B 分别用止推轴承和向心 轴承支撑,另用一绳索EC (E 点 位于过A 点的铅垂线上)约束矩 形板维持矩形板在水平面内处于 平衡状态。试求绳索的张力和A 、B 处的轴承支反力。 解:
(1)受力分析:(如图所示)
(2)平衡方程联立求解:
()0:
()0:
()0:
1022220:31022
0:33
20
200N 3503kN
4
3150kN
()0:3302222
204
20N B y
B x
C C
A x C
A y AC z
y x C C x C
A x y C y z C A M
M
M F AC AC G or
F F F
F F F
M AC F AC
F F
F G F
F F F F
G F G ----------------
==??=????=-+==??-+=?
?
?
?
?????
?
=-
==-
======
====∑∑∑∑∑∑F F F F 100k 2
N 0:0C
A z A z F F
G F ==+
-=∑
30 o
30 o
G
B
x
y
z A
C
D E 30 o
30
o
G B x
y
z
A C
D F C
F A y F A z
F A x
E
F B y
F B x
9-1
、如图所示平面图形(尺寸标注单位:cm )。试求该平面图形的形心。
解:
建立如图所示坐标系(坐标系的建立具有任意性)。将T 形平面图形分为两个子图形(两个矩形)。
由于平面图形的对称性(坐标轴y 取在对称轴上)。显然形心必在对称轴上 ,即x C = 0 。
I I II II
I II
(306)33(306)15
24cm (306)(306)
C C C A y A y y A A +??+??=
=
=+?+?
9-2、如图所示均质材料构成的机器基础(尺寸标注单位:cm )。试求该机器基础的重心。
解:
I I II II I II I I II II
I II
I I II
II
I II
(441)6(486)2
2.3077cm
(441)(486)(441)2(486)4
3.8402cm
(441)(486)(441)0.5(486)3
2.807(441)(486)
C C C C C C C C C V x V
x x V V V y V
y y V V
V z V
z z V V
+???+???===+??+??+???+???==
=+??+??---???-???=
=
=-+??+??7cm
6 30 6 30 6 30 6 30 x
y II I
C 4 4 4 8 1 6 x
z y o 4
4
4
8 1 6 x z y
o I
II
本讲主要内容 1、空间任意力系向一点的简化及结果分析 2、空间任意力系的平衡方程及常见的空间约束 3、重心的计算
1、空间任意力系向一点的简化 及结果分析
(1) 空间任意力系向一点简化·主矢和主矩 F 1 F 2 F n 1 F ¢ 2F ¢ n F ¢ 1M 2 M n M 空间汇交力系与空间力偶系等效代替一空间任意力系. ) (i O i i i F M M F F ==¢及结果分析
主矢 汇交力系的合力 主矢大小方向作用点: 一般令其作用于简化中心上 2 2 2 R )()()(???++=¢iz iy ix F F F F R R ),cos(F F iz ¢= ¢?k F 1F ¢ 2F ¢n F ¢ 1 M 2 M n M k j i F F ????++==¢z y x i R F F F R F ¢R R ),cos(F F ix ¢= ¢?j F R R ),cos(F F ix ¢ = ¢?i F (与简化中心无关)
主矩 空间力偶系的合力偶矩 主矩大小方向作用位置: 刚体上任意位置 1 M 2 M n M ) (??==i O i O F M M M R F ¢O ),cos(M M x O ?= i M O M 由力对点的矩与力对轴的矩的关系,有 k j i M )()()(???++=i z i y i x O F M F M F M 2 2 2 ) ()()(???++=z y x O M M M M O ),cos(M M y O ?= j M O ),cos(M M z O ?= k M (一般与简化中心有关)
第五章 空间任意力系 习 题 5.1 托架A 套在转轴z 上,在点C 作用一力F = 2000 N 。图中点C 在Oxy 平面内,尺寸如图所示,试求力F 对x ,y ,z 轴之矩。 题5.1图 解:cos 45sin 60 1.22x F F KN == cos45cos600.7y F F KN == sin 45 1.4z F F KN == 6084.85x z M F mm KN mm ==? 5070.71y z M F mm KN mm ==? 6050108.84z x y M F mm F mm KN mm =+=? 5.2 正方体的边长为a ,在其顶角A 和B 处分别作用着力F 1和F 2,如图所示。求此两力在轴x ,y ,z 上的投影和对轴x ,y ,z 的矩。 x y z O a a a A B F 1 F 2 α βα题5.2图 F F z F xy F y F x
解:21sin cos sin x F F F αβα=- 1cos cos y F F βα=- 12sin cos z F F F βα=+ 12sin cos x z M F a aF aF βα==+ 1sin y M aF β= 121cos cos sin cos sin z y x M F a F a aF aF aF βααβα=-=--- 5.3 如图所示正方体的表面ABFE 内作用一力偶,其矩M = 50 kN·m ,转向如图。又沿GA 、BH 作用两力F 、F ′,F = F ′,a = 1 m 。试求该力系向C 点的简化结果。 解:两力F 、F ′能形成力矩 1M 1M Fa m ==? 11cos 45x M M = 10y M = 11sin 45z M M = 1cos 4550x M M KN m ==? 11sin 4550100z z M M M M KN m =+=+=? C M m ==?
第五章 空间任意力系 5.1解:cos 45sin 60 1.22x F F K N == c o s 45c o s 60 0.7 y F F K N == sin 45 1.4z F F K N == 6084.85x z M F m m K N m m ==? 5070.71y z M F m m K N m m ==? 6050108.84z x y M F m m F m m K N m m =+=? 5.2 解:21sin cos sin x F F F αβα=- 1c o s c o s y F F βα=- 12sin cos z F F F βα=+12sin cos x z M F a aF aF βα==+ 1sin y M aF β= 121cos cos sin cos sin z y x M F a F a aF aF aF βααβα=-=--- 5.3解:两力F 、F ′能形成力矩1M 1M Fa m ==? 11cos 45x M M = 10y M = 11sin 45z M M = 1c o s 4550x M M K N m == ? 11sin 4550100z z M M M M K N m =+=+=? C M m ==?63.4α= 90β= 26.56γ= 5.4 如图所示,置于水平面上的网格,每格边长a = 1m ,力系如图所示,选O 点为简化中心,坐标如图所示。已知:F 1 = 5 N ,F 2 = 4 N ,F 3 = 3 N ;M 1 = 4 N·m ,M 2 = 2 N·m ,求力系向O 点简化所得的主矢'R F 和主矩M O 。 题5.4图 解:' 1236R F F F F N =+-=
第四章 空间力系 一、要求 1、能熟练地计算力在空间直角坐标轴上的投影和力对轴之矩。 2、对空间力偶的性质及其作用效应要有清晰的理解。 3、了解空间力系向一点简化的方法和结果。 4、能应用平衡条件求解空间汇交力系、空间任意力系、空间平行力 系的平衡问题。 5、能正确地画出各种常见空间约束的约束反力。 二、重点、难点 本章重点:力在空间直角坐标轴上的投影和力对轴之矩。空间汇交力系、空间任意力系、空间平行力系的平衡方程的应用。各种常见的空间约束及约束反力。b5E2RGbCAP 2、本章难点:空间矢量的运算,空间结构的几何关系与立体图。 三、学习指导 1、空间力系的基本问题及其研究方法 空间力系研究的基本问题仍然是静力学的三个基本问题,即:物体的受力分析、力系的等效替换和力系的平衡条件。空间力系是力系中最普遍的情形,其它各种力系都是它的特殊情形。按由浅入深、由特殊到一般的认识规律研究空间力系,是从理论上对静力学作一个系统而完整的总结。p1EanqFDPw 与平面力系的研究方法相似,这里也采用力向一点平移的方法将空间任意力系分解为空间汇交力系和空间力偶系,再应用这两个力系
的合成方法来简化原力系,然后根据简化结果推导出平衡条件。由于空间力系各力作用线分布在空间,因而使问题复杂化。出现了力在坐标轴上的二次投影法、力对轴的矩以及用向量表示力对点的矩和力偶矩等新问题,简化的结果和平衡方程也复杂了。DXDiTa9E3d 2、各类力系的平衡方程 各类力系的独立的平衡方程的数目不变。但是平衡方程的形式可以改变。上表列出的是一般用形式。 解题指导
对于解力在直角坐标轴上投影或力沿直角坐标轴分解这类问题,重要的是确定力在空间的位置。一般解题的思路如下:RTCrpUDGiT 认清题意,仔细查看结构<或机构)的立体图,它由哪些部 件组成,各部件在空间的位置,以及它们和坐标轴的关系。 5PCzVD7HxA 认清力的作用线在结构<或机构)的哪个平面内,寻找它与 坐标面的交角,然后找力与坐标平面的夹角及力与坐标轴的 夹角。jLBHrnAILg (3)考虑用一次投影或二次投影的方法求解。 2、计算力对轴之矩,一般令矩轴位于一个坐标面内,寻找与矩轴垂直 的平面,然后按题意选择以下两种方法: 将力投影到垂直于轴的平面上,然后按平面上力对点的矩计 算。怎样将力投影到平面上呢?可先由力的作用点向平面作 垂线,再寻找力和垂线所在平面与该平面的交线,然后将力 向交线投影。xHAQX74J0X 将力沿直角坐标轴分解,然后根据合力之矩定理计算。怎样 选择分解方向呢?一般让两个分力在与矩轴垂直的平面内, 一个分力平行于矩轴。LDAYtRyKfE 3、空间力系的解题技巧有以下两点: 平衡力系在任意轴上的投影等于零,在选择三个投影轴时, 可不相交,可不相互垂直,但三轴不能共面,任意二轴也不 能平行。如果所选投影轴垂直于未知力或它所在的平面,则 可减少平衡方程中未知力的数量,便于求解方程。 Zzz6ZB2Ltk 平衡力系对任意轴的力矩都必须等于零,在选择三个力矩轴 时,可不相交。可不相互垂直。另外,用力矩方程也能保证 合力为零,可用力矩方程代替投影方程。因此,空间力系的 平衡方程可以有四矩式、五矩式、六矩式。如果所选取的矩
第五章 空间任意力系 解:cos 45sin 60 1.22x F F KN ==o o cos45cos600.7y F F KN ==o o sin 45 1.4z F F KN ==o 6084.85x z M F mm KN mm ==? 5070.71y z M F mm KN mm ==? 6050108.84z x y M F mm F mm KN mm =+=? 解:21sin cos sin x F F F αβα=- 1cos cos y F F βα=- 12sin cos z F F F βα=+12sin cos x z M F a aF aF βα==+ 1sin y M aF β= 121cos cos sin cos sin z y x M F a F a aF aF aF βααβα=-=--- 解:两力F 、F ′能形成力矩1M 1502M Fa KN m ==? 11cos 45x M M =o 10y M = 11sin 45z M M =o 1cos 4550x M M KN m ==?o 11sin 4550100z z M M M M KN m =+=+=?o 22505C z x M M M KN m =+=?63.4α=o 90β=o 26.56γ=o 如图所示,置于水平面上的网格,每格边长a = 1m ,力系如图所示,选O 点为简化中心,坐标如图所示。已知:F 1 = 5 N ,F 2 = 4 N ,F 3 = 3 N ;M 1 = 4 N·m,M 2 = 2 N·m,求力系向 O 点简化所得的主矢'R F 和主矩M O 。 题图
5-1 5-2.在图示正方体的表面ABFE内作用一力偶,其矩M=50KN·m,转向如图;又沿GA,BH作用两力、',R=R'=502KN;α=1m。试求该力系向C点简化结果。 解:主矢: ' R=ΣF i=0 主矩:M c=M+m(R,R') 又由M cx=-m(R,R')·cos45°=-50KN·m M cY=0 M cz=M-m(R,R')·sin45°=0 ∴M c的大小为 Mc=(M cx2+M cY2+M cz2)1/2 =50KN·m M c方向: Cos(M c,i)=cosα=M cx/Mc=-1,α=180°Cos(c,)=cosβ=M cY/Mc=0,β=90°Cos(c,)=cosγ=M cZ/Mc=0,γ=90°即c沿X轴负向
5-3.一个力系如图示,已知:F 1=F 2=F 3,M=F ·a ,OA=OD=OE=a ,OB=OC=2a 。试求此力系的简化结果。 解:向O 点简化,主矢'投影 Rx '=-F · 21 R Y '=-F ·2 1 R Z '=F ·2 '=-F ·21-F ·21+F ·2 主矩o 的投影: M ox =2 13Fa ,M oY =0,M oz =0 M o '=2 13Fa i R '·M o =-2 13aF 2≠0,R '不垂直M o 所以简化后的结果为力螺旋。 5-4曲杆OABCD 的OB 段与Y 轴重合,BC 段与X 轴平行,CD 段与Z 轴平行,已知:P 1=50N ,P 2=50N ;P 3=100N ,P 4=100N ,L 1=100mm ,L 2=75mm 。试求以B 点为简化中心将此四个力简化成最简单的形式,并确定其位置。
第四章 空间力系和重心 基本概念: 空间力系——作用于物体上各力的作用线不在同一平面内时,称为空间力 系。 ? ???????空间一般力系 空间汇交力系空间平作力系空间基本力系分类 §4-1 力在空间坐标轴上的投影 一.一次投影法 已知力F 与x 、y 、z 三个从标的正向夹角分别为γβα,,。 ?? ? ??===γβαcos cos cos F Z F Y F X F Z F Y F X ===γβαcos ,cos ,cos 二.二次投影法 先将F 投影到期xoy 平面内Fxy 。(Fxy 与x 夹角?)F 与Z 夹角γ。 ???? ???===γ ?γ?γcos sin sin cos sin F Z F Y F X F 可沿X ,Y ,Z 三轴分别为F x ,F y ,F z 。 §4-2 力对轴的矩 一.力对轴的矩:即此力在垂直于该轴的平面上的投影对轴与平面交点之矩。 表示力:()()d F F M F M S S O Z ?±=== 符号规定。
??? ? ?? ??????为负负向为正 正向轴的姆指力的转动方向四指右手螺旋法则M M :: 讨论:????? ?? ?????==. ,200:1面的交点的矩平面上的分力对轴和平的可以看成力在垂直于轴力时轴的矩平行相交当力与转轴共面时Z Z M M 二.合力矩定理 合力对任一轴的矩等于各分力对同一轴之矩的代教和, ()()Fi M R M Z Z ∑= 三.力对点之矩的矢量表示 1、矢量表达式()F r F M ?=0 2、判断表达式: ()Z Y X F F F z y x k j i F r F M ?=0 ()()()k yFx xFy j xFi zFx i zFy yFi -+-+-= 力矩在三个坐标轴上的投影 ()[]()()[]()()[]()??? ??=-==-==-=F m yF xF F M F m xF zF F M F m zF yF F M z x y z O y z x Y O x y z X O 即:力对点之矩在通过该点的任一轴上的投影等于该力对此轴之矩。 例4-1 (精讲) §4-3 空间系的平衡条件及其应用 一.空间力系向任一点消化结果 主矢: F R ∑=0 主矩: ()F M m 00∑= 用投影表示(常用) ??? ??∑=∑=∑=Z R Y R X R z y x 000 ??? ??∑=∑=∑=mz M my M mx M Z Y X 000 (三个坐标轴上的投影) (外力对轴之矩的代数和)
第四章 空间任意力系和重心 4-2.在边长为a 的正方体物体,沿对角线DA 方向作用一个 力F 。则该力对x 轴的力矩为。对z 轴的力矩为 0。对O 。 4-2水平圆盘的半径为r ,外缘C 处作用有已知力F 。力F 位于圆盘C 处的切平面内, 且与C 处圆盘切线夹角为60o ,其他尺寸如图所示。求力F 对x ,y ,z 轴之矩。 解:力F 的作用点C 的坐标为(,)2r r h 力F 沿三个坐标轴的投影为: 00cos60sin 60x F F F == 001 cos 60cos 604 y F F F =-=- 0sin 60z F F =-= 则有: 1()()(3)2244x z y F M yF zF r F h F h r =-= ?--?-=- ())2y x z r M zF xF h r h =-=-?=+ 1()242 z y x r Fr M xF yF F =-=?-=- x 图4-2
4-3 图示空间构架由三根无重直杆组成,在D 端用球铰链连接,如图所示。A ,B 和C 端则用球铰链固定在水平底板上。如果挂在D 端的物重P=10KN ,求铰链A ,B 和C 的 解:整体受力分析如图所示(空间汇交力系): 0 x F =∑;00cos45cos450A B F F -= 0 y F =∑;00000sin 45cos30sin 45cos30cos150A B C F F F +-= 0 z F =∑;00000sin 45sin30sin 45sin30sin150A B C F F F P +--= 解得:26.39A B F F kN ==,33.46C F kN = 4-4 图示六杆支撑一水平板,在板角处受铅直力F 作用。设板和杆自重不计,求各杆的 内力。 解:所有杆件均为二力杆,假设所有杆件均受拉,水平板受力如图所示: 对3杆所在的轴取矩: 3 0M =∑;4340F d ?= 即得:40F =(1,5杆与3杆平行,6杆与3杆相交) 对1杆所在的轴取矩: 1 0M =∑;6614410F d F d ?+?= 即得:60F =(3,5杆与1杆平行) 图4-4
第五章空间任意力系 5.1解:cos45sin 60 1.22x F F KN c o s 45c o s 60 0.7 y F F K N sin 45 1.4z F F KN 6084.85x z M F mm KN mm 5070.71y z M F mm KN mm 6050108.84 z x y M F m m F m m K N m m 5.2 解:21sin cos sin x F F F 1c o s c o s y F F 12sin cos z F F F 12sin cos x z M F a aF aF 1sin y M aF 121cos cos sin cos sin z y x M F a F a aF aF aF 5.3解:两力F 、F ′能形成力矩1 M 1 502M Fa KN m 11cos45x M M 10y M 11sin 45 z M M 1c o s 45 50x M M K N m 11sin 45 50 100z z M M M M KN m 2 2 505C z x M M M KN m 63.4 90 26.56 5.4 如图所示,置于水平面上的网格,每格边长a = 1m ,力系如图所示,选O 点为简化中 心,坐标如图所示。已知:F 1 = 5 N ,F 2 = 4 N ,F 3 = 3 N ;M 1 = 4 N ·m ,M 2 = 2 N ·m ,求力系 向O 点简化所得的主矢 ' R F 和主矩M O 。 题5.4图 解:' 1236R F F F F N
方向为Z 轴正方向 21232248x M M F F F N m 11 2 3 312y M M F F F N m 2 2 14.42O y x M M M N m 56.6333.990 5.5 解: 120,cos30cos300Ax Bx X F F T T 210,sin30 sin30 0Az Bz Z F F T T W 120,60cos3060cos301000 z Bx M T T F 120,3060sin30 60sin301000 x Bz M W T T F 2111 0,0 y M Wr T r Tr 20.78,13Ax Az F KN F KN 7.79, 4.5Bx Bz F KN F KN 1 2 10,5T KN T KN 5.6 题5.6图 2a ,AB 长为2b ,列出平衡方程并求解