海洋深水浮式平台现场监测研究进展?
屈衍1,季顺迎2,时忠民1
(1. 中海石油研究中心,北京 100027;2. 大连理工大学,辽宁大连 116023)
摘要:在深水油气田开发中,现场实时监测可为平台系统的作业生产提供实时的数据支持,并对平台设计方案进行校核与评估。平台监测系统已经逐步成为深水浮式平台完整性管理的重要系统之一。本文对国外已经开展的深水油气田开发中的浮式平台及立管、系泊系统的现场监测技术进行了归纳。选取了已有的浮式平台现场监测系统实例进行了分析。通过对国外深水油气开发中监测技术和经验的分析和归纳,对我国相关技术的应用将起到一定的促进作用。
关键词:现场监测;浮式平台;立管系统;系泊系统
1 前言
近年来,随着深水油气田开发的迅速发展,越来越多的深水浮式平台在美国墨西哥湾、欧洲北海、巴西海域和西非沿海等海域得到了应用。由于浮式平台结构形式复杂,发展历史相对较短,其设计,分析理论尚不完善。工程界对平台在实际海洋环境中的总体性能是否与设计结果相一致并没有完全的把握。在灾害海洋环境作用下,也发生了多起浮式平台破坏的事故。如墨西哥湾2005年Katrina和Rita飓风中,约16座浮式钻井平台发生平台移位及系泊系统损坏[1],TLP平台Typhoon在Rita飓风过后倾覆等。为了改进善这一现状,石油公司大力发展了浮式平台系统的完整性管理技术(FSIM,Floating System Integrity Management)。其主要任务是通过对平台系统现场监测和平台检测,得到平台在实际海况作用下的响应,进而制定符合现场情况的平台操作策略,改进新平台的设计方法,同时对平台在灾害环境下可能发生的风险进行更为准确的评估。[2 OTC 20137]
浮式平台系统的现场监测是完整性管理技术中的核心部分,其主要作用可以归纳为:为平台设施的安全操作提供数据;评估、校核平台的在位表现;缩短平台灾害环境下的关断时间,降低损失;准确评估平台未来可以承受的回接能力;为平台破坏后涉及法律事务提供数据支持[3 OTC 18626]。鉴于现场监测的重要性,目前,几乎所有的浮式平台系统都已经安装了现场监测系统。
我国海洋石油工程正处在由浅水到深水的跨越阶段,国家正在积极进行南海深水开发的技术储备,并已经开始建造针对南海的3000米水深半潜式钻井平台。鉴于南海目前仍没有深水作业的浮式平台,因此,需要同步发展浮式平台监测技术,对南海海洋环境作用下的浮式平台响应进行测量。为建立针对南海海域的浮式平台完整性管理系统进行技术积累。
考虑到深海现场监测的方案和部分设施需要在平台设计和建造前进行确定,以便在陆上进行前期工作。因此,在我国深海油气平台开发建造前就应对现场监测的方案、原理和技术进行深入系统的分析整理。为此,本文针对国际上深水浮式平台现场监测的主要工作进行了回顾,对现场监测的实施方案以及关键技术进行了分析总结,其目的主要是收集当前深水油气开发工程中的现场监测方案和技术、整理相关的监测经验,为我国开展深海油气中的现场实时监测技术提供依据。
本文首先对深水海洋环境、浮式平台结构系统、系泊系统、立管系统监测技术进行介绍,对IMMS系统及IRMS系统技术进行总结,并选取几个在浮式平台上开展的实际监测项目内容进行介绍。
2 浮式平台结构的现场实时监测
目前的深水浮式生产平台形式可以概括为三大类:张力腿平台(TLP)、深吃水立柱式平台(SPAR)、半潜式平台(SEMI)。对于深水浮式平台结构的实时监测主要是对运动和位置进行测量,以确定其与附属的立管、系泊/张力腿系统的相对运动和作用力。
对于平台的运动和位置一般测量其6个自由度上的运动响应,其中平台的平动分量通常采用3个线加速度计测量,转动分量用3个高精度角速度计进行测量。浮式平台的平动周期通常为20 s以上或者更高。
采用加速度传感器,安装的位置一般要避免平台振动的影响。
此外,GPS定位系统也一种有效的测量平台运动的有效方法。如果测量平台的准静态倾角,最精确的办法就是采用倾角仪\倾斜计。
由于结构动力特性的不同,因此在对平台结构进行运动和响应监测时应有针对性地选用不同特性的传
资助项目:国家重大专项课题资助项目(2006AA09ZX026-002).
作者简介:屈衍(1977-),男,辽宁辽阳人,博士,工程师,主要从事海洋工程和工程力学专业研究。
感器。例如,在墨西哥湾(GoM)的Allegheny Seastar TLP平台监测中,选用4 Hz频率采集6个上部张力腿的张力,选用1 Hz的GPS测量平台的运动情况。尽管GPS不能监测到波浪作用下的平台运动,但可识别出其平均运动情况[7]。此外,在平台甲板上安装了200 Hz的加速度传感器以测量平台振动情况。如果在每个张力腿上安装吃水计,这样平台的升降就可以由吃水计测量结果和潮汐表确定。
由于环境荷载对平台工作状态的重要性,对风、浪和流的作用荷载进行测量将会更加有效地获得作用力的大小。然而,由于以上环境要素作用力的特殊性,各环境荷载不易直接测量。它一方面可以通过安装在平台上的压强传感器进行局部荷载的测量,另外还可以通过构件间的内力进行推算。平台构件间的内力则通过测量其相对变形或局部应变进行确定。
通过对浮式平台结构的动力过程监测,可确定不同类型平台结构的动力特性,同时为分析平台结构与立管、系泊系统之间的耦合作用提供依据。
最早的深水现场监测系统是由BMT公司在1987年为CONOCO公司的Joliet TLWP平台开发的,随后不断发展和完善。Edwards et al.(2005)对当前浮式平台的综合性海洋监测系统(IMMS)进行了全面地分析,并指出现场监测的主要内容[3]。近年来,平台系统的整体性监测系统有了迅速的发展,并在深水油气开发中发挥着强有力的作用。
3 立管系统的现场监测
立管系统是指用来连接浮式平台和海底井口的传输管线,是深海油气开发工程中非常复杂的一部分。由于深水环境的不确定因素以及立管设计中的不足,使得现场实时监测更为重要。它在保障立管系统的完整性、制定现场操作方案、优化检验方法、制定维修方案以及改进设计等方面均起着重要的作用。
Chezhian et al.(2006)对当前不同类型立管的监测方法和技术进行了全面的总结和归纳,并指出在立管监测主要考虑如下两个问题:监测目的、位置、方法以及对平台和立管的重要性;如何利用测量结果提供反馈信息[8]。当前立管监测中的重点发展技术包括:提高立管角速度测量的精度、减小传感器的尺寸和重量、降低长周期应变测量的造价、立管内部流速监测、全长度光纤应变测量技术、深水光纤ROV安装、测量数据的存储和遥感传递等[8]。
目前,较广泛采用的立管系统主要包括顶部张紧立管(TTR)、柔性立管、钢悬链立管(SCR)和混合立管等4种。针对不同类型的立管类型,发展了不同的现场监测技术。
3.1 TTR监测
TTR主要用于干式采油树类型的浮式生产系统与海底系统的连接,并方泛地应用于TLP和Spar平台。由于TTR在与上部浮式平台和海底基础竖直相连处的转角受到约束,其在波浪和海流作用下对平台竖直运动非常敏感。如果顶部张力为负,TTR很容易发生屈曲现象。此外,涡激振动(VIV)导致的TTR疲劳损伤也是一个非常重要的问题。
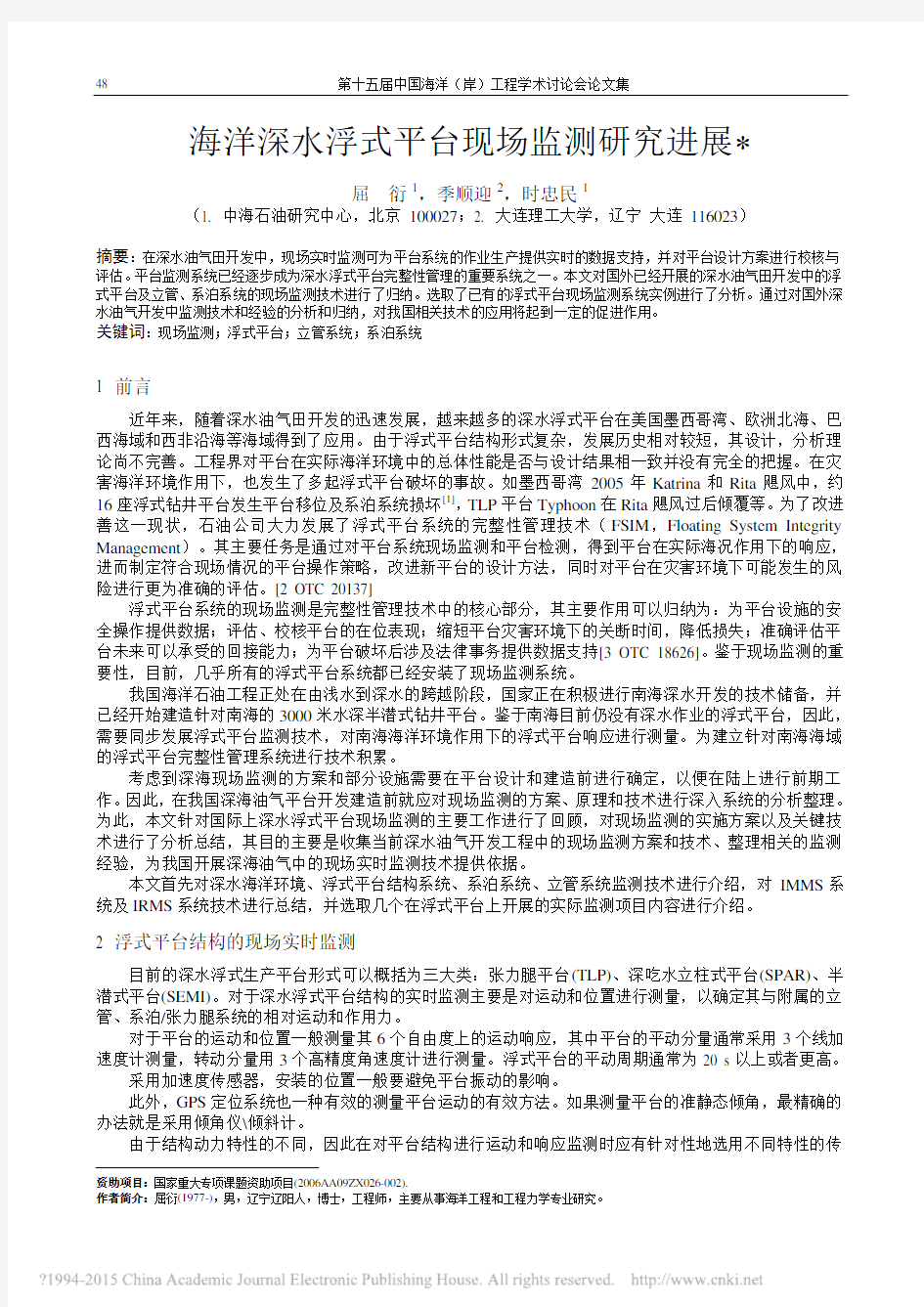
对于TTR立管,一般需要对其顶部的拉力和弯矩进行监测。例如,在GoM的一个SPAR平台上,Thethi et al. (2005) 为研究TTR的疲劳问题,采用2H Offshore 公司自行设计的自容式传感器进行了现场监测[9]。该传感器该测量仪里面设置三向加速度传感器和二向角速度计。它重约4 kg,内存128M,可适用于10 000 ft 水深测量。在TTR上的传感器分布及由水下机器人(ROV)安装过程如下图所示。此外,由于每个TTR立管均安装充满空气或氮气的浮桶,并通过立杆将采油树与平台底舱相连。在连接器处可以进行立管所受拉力和弯矩的测量。一般一个TTR立管监测系统由三个应变压力计组成。该压力计的使作寿命可达8年,其量程可根据不同情况而确定,一般可达1500 kips,其精度可达1%左右[3]。
在立管的VIV监测中,Natarajan et al. (2006)采用线性回归法进行了传感器位置的优化布置,以及传感器的数量及精度、深水声纳数据传输中的电力供应、加速度传感器的应变片和光纤测量技术及其温度补偿、长期监测中的仪器校对和稳定性。在立管监测中,传统的应变片传感器具有如下缺点:高温条件下粘接的寿命较短、焊点降低立管疲劳寿命、深水条件下的密封保护条件苛刻[10]。这时更多地采用光纤测量技术进行ROV安装,从而避免了对立管结构的损伤[11]。
在TTR立管中,对立管冲程的测量也是一个重要部分。它可通过立管与平台间的相对位置来判断其是否在可允许范围之,还还反映出立管浮桶是否提供了适当的浮力。冲程的测量一般通过安装在平台底部与立管间的一个位置转换器进行测量。
3.2 SCR立管监测
SCR集海底管线与立管于一身,将井口与浮式平台结构相连,具有成本低,无需顶部预张力,对浮体漂移和升沉容度大,适用于高温高压介质等优点,是深水油气开发的首选立管系统。1994年Shell公司在GoM的872 m水深处安装了第一条SCR,现已成功地应用于不同类型的浮式平台,其应用水深已超过3 000 m。目前,在深水油气开发中,已安装使用了100多条SCR[12]。
为了适应于不同水深的需要,SCR的概念不断发展和延伸,目前主要有4种类型的SCR系统:简单悬链式立管、浮力波/缓波悬链线立管、陡波悬链线立管和L型立管。缓波和陡波立管是为减小立管的顶部张力而设计的,其隆起部分由浮力实现。因此,它们可适用于更深海域。
图1 TTR测量仪分布及ROV安装过程示意图[9]
一般SCR的现场监测可包括:VIV、波浪及平台运动引起的SCR疲劳载荷、下接触点等特殊部位的极值载荷、立管与床基的作用特性等[13]。在柔性连接处,对相对和绝对的角度、运动的测量一般需要ROV 进行辅助。对于SCR立管的测量是相对非常困难和昂贵的。共有16家公司和协会等联合进行了SCR的完整性管理的联合工业项目(IM JIP),其目标主要有两个:一是建立一个系统的SCR现场整体性管理方法,二是研究当时适用于SCR检测和监测的最新技术[14]。
对于立管的VIV监测,一般采用加速度和应变传感器。为了测量VIV情况下立管的振动情况,传感器的布点位置需要进行优化设计,其间隔至少要低于1/4个波长。在下接触点处,由于立管的曲率最大,其所承受的弯矩也最大。因此,VIV引起的疲劳破坏也最易发生在下接触点处。Natarajan et al. (2007)对平台引起的SCR动力响应、VIV和SCR与海床地基相互作用进行了监测。根据SCR的响应情况,进行了传感器的型号选择、测点布置等方面的研究[13]。
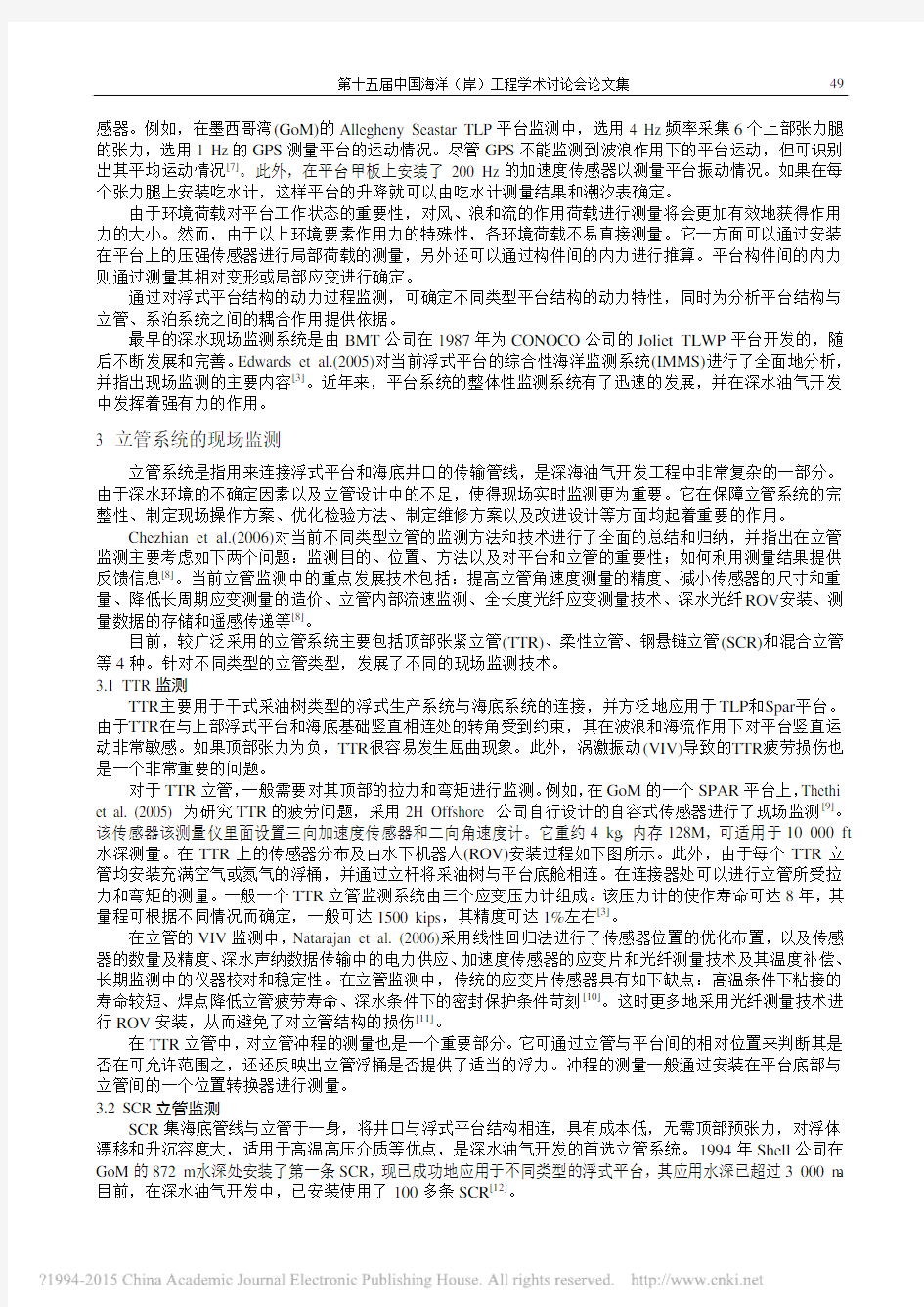
对于1998年安装在P-18半潜式平台上的SCR,为研究其VIV现象,对其曲率、张力、加速度响应和位移等信息进行了现场监测。该平台水深910 m,SCR长1 319 m,触地点距平台838 m。该立管外径27.31 cm,未安装VIV的抑制装置[15]。对于该立管的VIV测量,所采用的装置为2H Offshore公司自行设计的VIV 监测仪。此外,TDP的内力监测是通过安装在其附近的8个传感器进行的,它们相隔4 m。它通过在管线上安装应变计进行测量。测量结果每隔3小时记录900 s,可持续工作90天,可通过ROV进行置换。通过对该平台立管振动加速度的频率分析发现,波浪引起0.2 Hz频率的振动,VIV引起0.40 Hz频率的振动[15]。
图2 SCR立管测量系统示意图[15]
3.3 柔性立管监测
随着水深的增加,立管上部悬挂部位的拉力也不断加大,伴随着管内高压的影响,对立管系统设计提出了更严峻的挑战。柔性立管具有良好的柔性、可重复利用、较小的安装成本等优点[16]。柔性立管在20世纪90年代初已应用深水油气工程,目前已广泛地应用于海底管线与浮式平台、浮式平台之间,以及海
底管线间的流体传输。
对柔性立管的监测主要包括压强、轴向力、线型和温度等。测量方式可分为两种:单点监测和剖面监测。对于单点监测,有轴向力、内压、曲率、温度等。将应变或温度传感器安装于管线上就可以对以上内容进行测量。沿管线布置相当的测点,就可以获得所关注部分的信息。测量传感器可以在岸上、船上或通过ROV进行安装[17]。对于剖面传感器,可测量管线屈曲部分弯曲剖面、管线的free span和立管触底区。
对于整个管线的测量,光纤技术是一种合理的选择。由于光纤传感器不宜直接粘贴到立管上。这时可将光纤传感器预先封装在一个与管线外径相同的C型复合材料载体上,然后再将其粘接到管线上。该复合材料载体可以根据管线情况制作相应形状,且其具有良好的传递管线应变性能。该封装部件可以是自容式或外输式。该光纤测量装置最早应用于立管测量。Andersen et al. (2001)研制了采用光纤布拉格光栅(FBG)技术进行测量柔性立管内应变和温度的实验方案,并将FBG预布在立管内,并对不同曲率下的应变进行测量。
3.4 混合Hybrid立管监测
混合立管一般由一个钢质竖直立管与一个悬链式柔性管构成,最早应用于20世纪80年代,现已广泛地应用于不同深水油气开发中。最早安装于GoM的第一代混合立管造价高昂,以Girassol为代表的第二代混合立管在岸上建造,然后拖至开发海域。这两代立管的共同缺点是粘接设计中的复杂性、安装的风险性和现场开发中的低灵活性。2H Offshore公司最近研制了第三代混合立管(COR )以克服以上缺点。
针对西非Girassol 混合立管系统,发展了相关的监测系统[19]。它主要包括:锥形连接处的应力、浮筒运动、立管温度等。此外,还将进行浮筒的密封性、内部管线的失效和立管锚泊处的失效分析。在立管塔安装过程中以及投入使作后,它均进行测量以保障实际应力在可允许范围之内。此外,通过立管浮筒运动特性的监测还可获得浮体内部入水的信息。运动性能的测量内容主要包括:3个倾角测量、一个内置3方向加速度计。它通过ROV进行时隔6个月安装操作,每4 h记录20 min数据。对于立管温度主要进行了立管底部的测量,它也同样通过ROV进行定期的更换。
4 锚泊系统的现场监测
由于深水浮式平台系统需要在开发海域进行持续的长期作业,这就需要其系泊系统也能够长期保持正常工作。从以往平台结构失效情况来看,其中相当一部分来源于锚泊系统的失效。例如,在2004年Ivan 飓风中,在GoM有5座MODU是因为锚链的破开而发生破坏[20]。典型的锚泊线材料有锚链、金属绳、合成纤维绳。目前,在锚泊系统现场实时监测中,大多侧重于锚链和张力筋腱的测量。
4.1 锚链监测
锚链一般广泛地应用于两个特殊位置,一是与平台结构连接处,二是海底的下接触点。锚链可分为有肋锚链和无肋锚链两大类。锚链在正常工作状态下,一般只承受轴向力,并有很强的力学性能。但当其发生缠绕或扭转时,其整体工作性能就要发生影响,并可导致其发生破坏失效。
锚链在受拉作用下,其接触部位将产生很大的摩擦力,并可发生局部失效。在一定条件下会发生平面外弯曲失效。特别是在长期服役中,这种因摩擦引起的弯曲疲劳是非常显著的。例如,西非Girassol浮式平台的4根锚链在工作仅7个月后突然断裂,其原因就是锚链在与平台连接处发生平面外弯曲疲劳损伤,最终导致断裂[21]。
近年来,2H Offshore公司开发了一系列锚链监测技术,可进行锚链倾角和变形的测量(如图3所示),并由此可分析锚链张力。Brown et al. (2005) 对北海浮式平台的系泊系统进行了深入的现场监测,其目的是为系泊系统的设计和现场操作提供反馈信息,以改进设计方案和操作状态[20]。此外,有肋锚链的肋筋受损情况直接影响到锚链的安全性能。这方面的监测可以通过水下ROV的声学共振或水下摄像方法进行判别[20,22]。
图3 锚链倾角及变形监测示意图[22]
4.2 张力筋腱的监测
对于TLP平台,其张力腿与平台立柱数量是一一对应的。每个张力腿由2~4根张力筋腱/钢筋束组成,
上端固定在平台本体上,下端与海底基座模板相连,或直接连接在桩基顶端。张力腿在海流作用下的涡激振动现象以及TLP平台在海浪作用下的不规则运动均会引起张力腿内的交变应力。在交变应力作用下,拉索中的微小缺陷可能发生疲劳扩展。因此,TLP 张力筋腱的疲劳损伤是一个关键问题[23-24]。
为确定张力腿的受力状态以及平台上部荷载的分布情况,一般进行TLP张力腿筋腱张力测量。当张力接近0甚至为负,或者超过其张力的许用值时,均表明上部荷载或环境荷载超过了许用值。此外,通过对张力筋腱张力的频谱分析,还可以识别张力腿的VIV现象。该方面的监测,一般在张力腿上部安装一个张力测量系统。它主要由三个压力传感器组成,如图4所示。每个压力传感器均通过其内部弹性元件的应变来确定其所承受的压力。一般在TLP平台建造时就已将该张力测量系统安装上[3]。
图4 张力腿筋腱的张力测量系统[3]
2001年4月份在GoM的Allegheny Seastar TLP平台上监测了6个张力腿张力,并由此推断了张力腿在强烈海流作用下的VIV现象。通过对不同时刻张力的频谱分析,可清楚地发现不同时刻的结构振动情况。不同位置的监测结果表明:在海流达到最大值时易发生了VIV现象,并导致了平台甲板处的强烈振动[7]。
5 气象水文条件的现场监测
海洋气象和水文等环境因素是导致深水平台结构系统环境荷载的主要环境条件,其中对油气生产作业系统影响最严重的一般是风、波浪和海流。特别是在飓风等恶劣环境条件下,环境荷载对平台结构安全会带来具大的威胁,甚至造成平台结构的倾覆、立管或锚链的断裂等灾难性后果[25-26]。因此,对油气作业区进行气象水文要素的现场实时监测是保障深水平台系统安全运行的有效手段。
5.1 气象要素监测
气象要素主要包括风速、风向、气温、相对湿度、大气压、降水量、能见度等。它们一般通过安装在平台顶部的气象站进行长期连续监测,其技术已非常成熟。风速和风向的测量一般采用带有叶片的风速计,但在飓风条件下该风速计经常破坏,因此采用声学风速计是更为理想的选择[2]。浮式平台系统的气象要素监测已成为其运行期间的一个常规则性的监测内容。
5.2 波浪要素监测
在波浪监测系统中,它可通过安装在平台上的航海雷达进行波浪特性的监测。早在1994年就已在北海Ekofisk油田2/4K SPAR平台上采用的X-band WaMos II雷达进行全天候地监测海面波浪特性,如有效波高、波峰周期和长度、波浪方向等,并具有很高的测量精度[27]。如果测量波浪的剖面性质,可采用俯视水平/液面雷达。通过合成3个方向的波浪雷达可确定相应的波浪谱,由此可进一步确定出波浪的周期的频率。
此外,还可以通过安装在平台上的气隙传感器进行测量估算波高和周期,以及上浪情况。对于TLP和SEMI平台,采用空隙传感器对于估算波高和周期是非常有效的。但对于SPAR平台,由于海浪与平台的撞击影响,其误差较大。
5.3 海流剖面监测
在深海油气作业中,由于海流对平台结构,特别是立管系统、系泊系统有很强的作用力,甚至引发涡激振动(VIV)或涡激运动(VIM),因此对潮流的监测一直是现场监测的重要内容。由于海流速度随海水深度的变化较大,其在方向和数值上均是时间和深度的函数。
为获得不同深度的海流信息,一般采用多普勒声学剖面计(ADCP)进行海流剖面测量。当然,也有可在不同深度处布置单点机械式或电磁式海流计来获得海流剖面信息。如果采用ADCP,它们的测量范围在1000m以内。如果水深较深,则在平台底部安装一个向下探测的ADCP,在海底安装一个向上探测的ADCP。对于平台底部ADCP的安装,一般在建造平台时就制订相应的设计方案,并进行预制件的安装。对于坐底式仰视ADCP一般通过ROV进行安装。
目前,ADCP主要有如下3种类型:38kHz的Ocean Surveyor (OS), 75kHz的Long Ranger(LR), 300kHz
的Sentinel和Horizontal (H)-ADCP。38 kHz的Ocean Surveyor的量程可达1 100 m,一般安装在海底进行仰视测量。75 kHz和300 kHz的ADCP的控制器和声学探头集中在一起,一般量程较小,分别为650 m和100 m左右。H-ADCP一般用于测量结构物附近海水表面的水平剖面内流速。
以GoM工作水深为3330feet的Front Rummer桁架式Spar上的EPMS系统为例,它在平台的海面处安装了300 kHz的H-ADCP,在平台Hull底部分别安装了一个俯视75 kHz和仰视300 kHz的ADCP[28]。此外,Brown et al. (2005)也讨论了在3 000 m超深海海域采用类似的组合式ADCP进行全剖面海流的测量方案。它将75 kHz的ADCP安装于海底以进行底部海流的详细监测,将38 kHz的ADCP安装于平台底部和中部水深处,并通过16-21 kHz的中频率声学模式进行海面与海底的通信和数据传输。每20 min传递一组数据,每次通信时间为2 s。Garcia et al. (2006)则采用ADCP和单点海流计串联的方式在GoM进行了1 500 m 水深的流速、盐度、水温等要素的剖面测量。它将3个ADCP和2个海流计用锚链连接,如图5(a)所示[29]。Van den Boom et al. ( 2005)也介绍了一种海流剖面的组合测量方法同,如图5(b)所示[2]。
(a) (b)
图5 海流剖面ADCP测量的布点示意图[2,29]
5.4 内波监测
内波是由于海水密度变化而引起的浮力波,是一种大振幅的重力波,在暖水层和冷水层之间传播。内波可对海洋结构产生强烈的局部荷载和弯矩,对深水油气开发的危害是巨大的。内波的演化及内波间的相互作用,以及在水平面内的结构形式还很难理解,其深入的研究还尚待进行[30]。
尽管在深水海域已发现内波的存在,但对内波的监测非常困难。最近几年,人们开始通过卫星遥感图象进行内波的监测[31,32]。由于内波一般离海面较浅,并影响到海洋表面的粗糙度,因此一般通过低分辩率雷达图象或高精度的卫星光学图象进行识别。例如,Ho et al. (2005)在Sulu海通过合成孔径雷达卫星监测到的内波振幅为10~90 m,波长达5~16 km[31]。在位于菲律宾和马来西亚之间的Sulu海,就多次通过卫星图象观测到内波。在我国南海,也观测到内波的存在[32]。
6 完整性现场监测的典型实例
为保障浮式平台系统的安全作业,需要进行整体性现场监测,并主要进行进行风、浪、流等气象水文资料、平台位置和运动、立管和锚固系统等相关内容的全方位同步监测。通过对不同内容的监测,对结果进行实时直观显示、分析,进而对危害进行预警和有效处理。下面以Macro Polo – TLP平台系统的完整性监测为例进行介绍。
Macro Polo是一个典型的进行了JIP工作的TLP平台,位于美国墨西哥湾,水深1 300 m。该平台于2004年投产,其有效荷载为11 500 t。它附有6根13 3/8英寸TTR,1个12英寸输油SCR,一个18英寸输气SCR。该平台在2004年6月完成了JIP监测系统的设计和安装,并进行了为期3年的现场监测。其目的是检验深水TLP的设计方法、评估各环境荷载及平台运动[33]。该平台主要测量内容包括:3个波浪雷达、2个超声风速计、仰视和俯视ADCP、平台低频运动的DGPS、6个波浪频率传感器、立管张力、立管振动、张力腿张力。其测量系统布点图如图6所示。每隔10 min存储一组数据,所监测数据统一集中于数据采集系统,并直观显示出来为平台操作人员参考,同时再通过网络传送到陆上分析中心。
图6 Marco Polo TLP平台及其测量系统[2,33]
该平台采用应变计测量波浪引起的振动,采用差分GPS测量平台的低频运动。对风速和风向在两个层面上进行了声学测量。浪高和方向采用3个水平雷达进行测量,ADCP用于测量流速剖面。所有传感器的数据通过导线集中到带有UPS的中心处理器。
在该平台监测过程中经历了Ivan(2004年9月,最大风速120 nm)、Katrina(2005年8月,最大风速45 nm)和Rita(2005年9月,最大风速)飓风。尽管Macro Polo平台接近于飓风中心,其风速达138 mph,最大浪高达28 m,但其并未受到明显破坏。更为重要的是该平台在飓风过程中完整地监测了风、浪、流等重要环境条件以及平台响应情况。van Dijk et al.(2007)对飓风中实测的风速、波高、平台振动响应及低频运动情况进行了较为详细地分析和讨论,进而对该平台的JIP现场监测系统进行了综合性的评价[33]。这为检验飓风作用下的平台设计方案具有重要意义。作为JIP工作的一部分,该平台的测量数据主要用于检验TLP平台设计以及其后超深水的工程模式和方法。
7 结语
随着我国油气开发向深海及超深海域的推进,相关的深海油气开发技术也应不断地进行发展和完善。在深海油气开发中,海洋工程的现场实时监测具有重要的意义。为此,本文对国外深水油气开发中浮式平台、立管系统和系泊系统,以及相关的气象和水文要素的现场监测技术及实施情况进行了较为全面的归纳和整理。最后,对深水油气开发工程的整体性监测的一个典型实例进行了较为详细地介绍。通过对国外深水油气开发中现场实时监测工作的归纳与整理,将对我国相关研究有一定的借鉴意义,促进关键技术的发展。
参考文献:
1Malcolm Sharples, Post Mortem Failure Assessment of MODUs During Hurricane Ivan, Minerals Management Service Report, MMS Order No.: 0105PO39221,September 2004.
2张剑波. 半潜式钻井船典型节点疲劳可靠性分析. 船舶工程, 2006, 28(1): 36-40.
3Van den Boom H, Koning J, Aalberts P. Offshore monitoring, real world data for design, engineering and operation.
Proceedings of Offshore Technology Conference, OTC-17172, 2005, Houston, USA.
4Edwards R, Prislin I, Johnson T, et al. Review of 17 Real-time, environment, response, and integrity monitoring systems on floating production platforms in the deep waters of the Gulf of Mexico. Proceedings of Offshore Technology Conference, OTC-17650, 2005, Houston, USA.
5李润培, 谢永和, 舒志. 深海平台技术的研究现状与发展趋势. 中国海洋平台, 2003, 18(3):1-5.
6方华灿. 对我国深海油田开发工程中几个问题的浅见. 中国海洋平台, 2006, 21(4):1-8.
7张威, 杨建民, 胡志强, 肖龙飞. 深水半潜式平台模型试验与数值分析. 上海交通大学学报, 2007, 41(9): 1429- 1434.
8Leverette S, Rijken O, Dooley W. Analysis of TLP VIV responses to eddy currents. Proceedings of Offshore Technology Conference, OTC-15289, 2003, Houston, USA
9Chezhian M, Mork K, Meling T S. NDP review of state-of-the-art in riser monitoring: lessons learned. Proceedings of Offshore Technology Conference, OTC-17810, 2006, Houston, USA.
10Thethi R, Howells H, Natarajan S. A fatigue monitoring strategy & implementation on a deepwater top tensioned riser.
Proceedings of Offshore Technology Conference, OTC-17248, 2005, Houston, USA.
11Natarajan S, Howells H, Deka D, et al. Optimization of sensor placement to capture riser VIV response. Proceedings of 25th International Conference on Offshore Mechanics and Arctic Engineering, OMAE2006-92366, 2006, Hamburg, Germany.
12Cook H H, Dopjera D E, Thethi R, et al. Riser integrity management for deepwater developments. Proceedings of Offshore
Technology Conference, OTC-17891, 2006, Houston, USA.
13Song R, Stanton P. Advances in deepwater steel catenary riser technology state-of-the-art: Part I – design. Proceedings of 26th International Conference on Offshore Mechanics and Arctic Engineering, OMAE2007-29329, 2007, San Diego, USA.
14Natarajan S, Podskarbi M, Karayaka M, et al. Deepwater spar steel catenary riser monitoring strategy. Proceedings of 26th International Conference on Offshore Mechanics and Arctic Engineering, OMAE2007-29344, 2007, San Diego, USA.
15Quinn R, Kavanagh K. SCR integrity management – recent industry advance with a risk-based approach. Proceedings of Offshore Technology Conference, OTC-18310, 2006, Houston, USA.
16Franciss R, dos Santos, C P. Understanding the measured VIV data of a steel catenary riser installed at P-18 platform in Campos Basin. Proceedings of 23th International Conference on Offshore Mechanics and Arctic Engineering, OMAE2004-51177, 2004, Vancouver, Canada.
17Hill T, Zhang Y, Kolanski T. The future for flexible pipe riser technology in deep water: case study. Proceedings of Offshore Technology Conference, OTC-17768, 2006, Houston, USA.
18Roberts D. Subsea pipeline monitoring using fibre optic strain sensors. Proceedings of 26th International Conference on Offshore Mechanics and Arctic Engineering, OMAE2007-29412, 2007, San Diego, USA.
19Andersen M, Berg A. Development of an optical monitoring system for flexible risers. Proceedings of Offshore Technology Conference, OTC-13201, 2001, Houston, USA.
20Chapin G,. Inspection and monitoring of Girassol hybrid riser towers. Proceedings of Offshore Technology Conference, OTC-17696, 2005, Houston, USA.
21Browe D V, Abbassian F, Caballero C G. Real-time fatigue monitoring of deepwater risers using fiber-optic sensors.
Proceedings of ETCE/OMAE2000 Joint Conference: Energy for the New Millennium, OMAE2000/OSU OFT-4066, 2000, New Orleans, USA.
22Jean P, Goessens K, Hostis L. Failure of chains by bending on deepwater mooring system. Proceedings of Offshore Technology Conference, OTC-17238, 2005, Houston, USA.
23Hall A D. Cost effective mooring integrity management. Proceedings of Offshore Technology Conference, OTC-17498, 2005, Houston, USA.
24曾晓辉, 沈晓鹏, 吴应湘. 张力腿平台拉索的疲劳损伤. 船舶工程, 2006, 28(3):18-21.
25鲍莹斌, 李润培, 顾永宁. 张力腿平台系统疲劳可靠性研究. 上海交通大学学报, 2000, 34(1): 87-90.
26Perego R N, Li G, Beynet P A, et al. The Marlin TLP: Measured and Predicted responses during Hurricane Ivan. Proceedings of Offshore Technology Conference, OTC-17335, 2005, Houston, USA
27Sharples B P M, Buffington S. MODU performance in Hurricane Ivan. Proceedings of Offshore Technology Conference, OTC-18322, 2006, Houston, USA
28Reichert K, Hessner K, Dannenberg J, et al. X-Band radar as a tool to determine spectral and single wave properties.
Proceedings of 25th International Conference on Offshore Mechanics and Arctic Engineering, OMAE2006-92015, 2006, Hamburg, Germany.
29Campman C R, Gorgey S, Nolte J G. Fast track current profiling and response measurement on spars. Proceedings of Offshore Technology Conference, OTC-17474, 2005, Houston, USA.
30Garcia G C, Cortes R J J, Valle M O. Deep water current observations in Lankahuasa area in the Mexican Gulf of Mexico.
Proceedings of 25th International Conference on Offshore Mechanics and Arctic Engineering, OMAE2006-92644, 2006, Hamburg, Germany.
31Chakrabarti S K. Handbook of offshore engineering, Elsevier, 2005.
32Ho C, Su F, Kuo N. Detecting internal waves form satellite ocean color imagery. Proceedings of 25th International Conference on Offshore Mechanics and Arctic Engineering, OMAE2006-92177, 2006, Vancouver, Canada.
33Liu, A K, Hsu M K. Internal wave study in the South China Sea using Synthetic Aperture Radar (SAR). International Journal of Remote Sensing, 2004, 25(7-8): 1261-1264
34Van Dijk R, Van den Boom H. Full scale monitoring Marco Polo tension leg platform. Proceedings of 26th International Conference on Offshore Mechanics and Arctic Engineering, OMAE2007-29635, 2007, San Diego, USA.
海洋工程概述 作者:鲍柏文章来源:工学新闻网制作中心点击数:2771 更新时间:2006-8-10 12:50:21 热荐★★★ 主要内容 一般认为海洋工程的主要内容可分资源开发技术与装备设施技术两大部分。其中,资源开发技术主要包括:深海矿物勘探、开采、储运技术;海底石油、天然气钻探、开采、储运技术;海水资源与能源利用技术,包括淡化、提炼、潮汐、波力、温差等;海洋生物养殖、捕捞技术;海底地形地貌的研究等。而装备设施技术主要包括:海洋探测装备技术,包括海洋各种科学数据的采集、结果分析,各种海况下的救助、潜水技术;海洋建设技术,包括港口、海洋平台、海岸及海底建筑;海洋运载器工程技术,包括水面(各种船舶)、半潜(半潜平台)、潜水(潜器)、水下(水下工作站、采油装置、军用设施等)设备技术等。 主要种类 随着海运、海防、海洋开发事业的发展,各类海洋工程设施应运而生。主要的海洋平台的种类如下: 海洋平台:(1)移动式平台: 坐底式平台自升式平台钻井船 半潜式平台张力腿式平台牵索塔式平台 (2)固定式平台:导管架式平台重力式平台 图片选摘 图1、海洋平台系统
桩式平台是由承台(上部甲板)和桩基构成,按桩的材质又分为木桩平台、钢桩平台和钢筋混凝土桩平台。20世纪40年代末出现了导管架平台,它是先在陆上用钢管焊成一个锥台形空间框架,然后驳运或浮运至海上现场,就位后将钢桩从导管内打入海底,再在顶部安装甲板而成。70年代出现的塔架平台,是由一个垂直的导管架和若干组底桩构成,底桩沿导管架外围打入海底。桩式平台已广泛应用于建造海上码头、灯塔、雷达台、水文气象观测站等。其中导管架平台和塔架平台则多用于钻采海底石油或天然气。这种结构的主要优点是波浪及水流荷载小,但造价随水深成指数倍增长,使用水深受限制。 绷绳式平台亦称系索塔平台,是将一个预制的钢质塔身安放在海底基础块上,四周用钢索锚定拉紧而成。它适用于水深较大的海域。 重力式平台是靠平台自身重量稳坐在海底坚实土层之上。这种平台的底部是一个或多个钢筋混凝土沉箱组成的基座,基座上有钢立柱或钢筋混凝土立柱支撑上部甲板。由于整个结构比较大,一般先在岸边开挖的泥坞中建造基座,再拖往有掩护的深水区接高,然后浮运至现场,加载下沉。目前这种平台一般是作为海底贮油罐或用于钻采海底石油。其主要特点是抵御风暴及波浪袭击的能力强,结构耐久和维护费用低,但需开挖岸边坞坑,并要有近岸深水施工水域,结构高度因此受到限制。 浮式平台是一种大型浮体,有的可以迁移,有的不迁移。 可迁移的浮式平台又称活动平台,它是为适应勘探、施工、维修等海上作业必须经常更换地点的需要而发展起来的。现有的活动平台分坐底式、自升式、半潜式和船式4种(图2)。 ①坐底式平台(亦称沉浮式平台)多用于水深较浅的水域,其上部为工作甲板,下部为兼作沉垫的浮箱,中间用立柱或桁架支撑。作业时,往浮箱内注水使之座落海底;作业后,把箱内水抽出,平台依靠自身的浮力升起。②自升式平台适应水深范围较大,在漂浮状态时为一艘驳船,它的四侧装有若干根圆柱式或桁架式桩腿,用齿轮、齿条或液压机构控制升降。作业时,放下桩腿并插入海底一定深度,从而将船底托出水面,成为工作甲板。作业后,降下船体,拔起桩腿,即可拖航至新地点。桩腿底部带箱形沉垫的称沉垫自升式平台,不带沉垫的称插桩自升式平台。③半潜
基于物联网的 海洋生产大数据云计算分析系统
目录 一、前言 (1) 1、引言 (1) 2、系统概述 (3) 三、物联网部分 (4) 1、传感器部分 (4) 2、系统架构 (4) 3、系统硬件功能 (6) 4、所需设备 (9) 四、云计算部分 (11) 1、系统构架 (11) 2、系统功能 (11) 3、所需设备 (12) 五、大数据部分 (14) 1、系统构架 (14) 2、系统功能 (14) 3、所需设备 (17) 六、经济效益 (17) 七、综述 (17) 2
一、前言 1、引言 在渔业发展中,传统的养殖模式曾对我国水产品产量的快速增长起了重大作用。但随着人们消费水平和环保意识的增强,群众的饮食习惯和结构已发生了很大变化,绿色水产品越来越受到消费者的青睐。传统的养殖模式在生产实践中却存在种种弊端,所生产的水产品难以满足市场需求。具体表现在如下几方面: 1)、基础设施简陋、陈旧、经济基础脆弱 传统养殖企业缺乏现代化、高层次养殖生产所必需的物质条件和综合经营规模,导致经济效益低下。企业缺乏技术储备,无技术改造和扩大再生产资金,只能维持现状,在市场竞争中处于劣势。 图一:节虾养殖场 2)、产品养殖风险 水产养殖属于精细养殖产业,稍有不慎,死亡率会达到99%,由于恶劣天气、节气温度、水质、盐度等指标需要坐待非常精准,导致养殖业的风险增加,稍有不慎损失在40万元左右每亩。 3)、养殖水域环境条件不断恶化 我国人口稠密地区的水域绝大部分都富营养化,例如全国有水质监测的1200多条河流中,就有850条受到污染。海洋方面,自2000年以来,我国海域多次发生规模巨大、毒性极强的赤潮,给我国的海
国际浮式生产储油卸油船(FPSO)发展态势: FPSO(Floating Production Storage and Offloading)浮式生产储油卸油船,它兼有生产、储油和卸油功能,油气生产装置系统复杂程度和价格远远高出同吨位油船,FPSO装置作为海洋油气开发系统的组成部分,一般与水下采油装置和穿梭油船组成一套完整的生产系统,是目前海洋工程船舶中的高技术产品。 韩国船企对FPSO建造具有较强规模效应。如现代重工专门建有FPSO海洋项目生产厂,已交付了6艘大型FPSO;三星重工手中持有5艘大型FPSO订单;大宇造船海洋工程公司则是全球造船企业中建造海上油气勘探船最多的企业,2005年承接海洋项目设备订单计划指标是17亿美元。据海事研究机构(DW)预计,未来5年内FPSO新增需求将会达到84座,投资额约为210亿美元。 FPSO主要技术结构表: FPSO主要技术结构 FPSO主要结构功能 系泊系统:主要将FPSO系泊于作业油田。FPSO在海域作业时系泊系统多采用一个或多个锚点、一 根或多根立管、一个浮式或固定式浮筒、一座转塔或骨架。FPSO系泊方式有永久系泊和 可解脱式系泊两种; 船体部分:既可以按特定要求新建,也可以用油轮或驳船改装; 生产设备:主要是采油和储油设备,以及油、气、水分离设备等; 卸载系统:包括卷缆绞车、软管卷车等,用于连接和固定穿梭油轮,并将FPSO储存的原油卸入穿梭 油轮。其作业原理是通过海底输油管线把从海底开采出的原油传输到FPSO的船上进行处 理,然后将处理后的原油储存在货油舱内,最后通过卸载系统输往穿梭油轮。 配套系统:在FPSO系统配置上,外输系统是其关键的配套系统。 FPSO主要优点随着海洋油气开发、生产向深海不断进入,FPSO与其它海洋钻井平台相比,优势明显,主要表现在以下四个方面: (1)生产系统投产快,投资低,若采用油船改装成FPSO,优势更为显著。而且目前很容易找到船龄不高,工况适宜的大型油船。 (2)甲板面积宽阔,承重能力与抗风浪环境能力强,便于生产设备布置;
龙源期刊网 https://www.doczj.com/doc/5310529364.html, 基于谱分析法的深水海洋平台疲劳寿命分析作者:关放李开宇 来源:《名城绘》2017年第06期 摘要:导管架平台在服役期间受到海洋复杂载荷的作用而易产生节点疲劳破坏。由于交变应力的随机性,本文采用随机波浪谱和线性疲劳累积损伤理论对导管架式海洋平台在波浪荷载作用下的疲劳进行计算。波浪载荷则使用Morison方程计算,并结合所计算的关键节点的热点应力函数及P-M波浪谱得出疲劳累积损伤。本次分析同时考虑波浪长期随机性对结构疲劳强 度的影响。本文根据此理论使用SACS软件对南海海域某导管架平台进行了计算,所计算的疲劳寿命可为该海洋平台结构设计提供参考。 关键词:海洋平臺;谱分析法;疲劳损伤 目前工程界对海洋平台疲劳分析方法主要有简化疲劳分析方法、谱分析方法以及确定性方法。一般简化疲劳分析方法主要是基于疲劳应力的Weibull分布假设,用经验推荐的形状参数和计算得到的尺度参数代入拟合出该Weibull分布从而进行疲劳计算。谱分析法则是通过计算结构响应,结合波浪谱和波浪概率分布来计算应力长期分布,更为精确和直接,同时计算量也更大。确定性方法主要基于经验曲线进行疲劳寿命估算,精确性也不及谱分析法。海上平台作为海洋石油和天然气资源开发的基础设施,处于一个非常复杂和恶劣的环境中。它受到各种负载的影响,这些负载随时间和空间而变化。这些负荷的影响是长期连续和随机的。连续的周期性波动应力会对平台结构造成疲劳损伤,降低系统的可靠性,给经济安全带来诸多不利影响。因此,海洋平台结构的疲劳寿命分析变得越来越重要。波浪,海风和海流是作用于海上平台的主要载荷。由于风和电流影响平台结构的疲劳损伤相对较小,一般被忽略。本文主要考虑海上平台结构的波浪载荷。疲劳寿命影响作用。 工程行业的海洋平台疲劳分析方法主要包括简化的疲劳分析方法,光谱分析方法和确定性方法。一般简化疲劳分析方法主要基于疲劳应力的威布尔分布假设。经验推荐的形状参数和计算的尺度参数被替换以适合Weibull分布以进行疲劳计算。谱分析规则计算结构响应,结合波谱和波概率分布计算长期应力分布,更准确,更直接,计算量也更大。确定性方法基于疲劳寿命估计的经验曲线,精度不如光谱分析方法。 本文基于结构有限元分析软件SACS计算南海某平台的疲劳损伤度,以中国南海海领域中的一种新型深水固定平台是目标平台,平台结构更加复杂。采用热点应力谱分析方法,完成了主结构典型节点的疲劳强度分析。研究结果可为平台节点的详细设计和疲劳强度评估提供参考。 1谱分析疲劳理论简介 1.1波浪载荷
1)海洋平台按运动方式分为哪几类?列举各类型平台的代表平台? 固定式平台:重力式平台、导管架平台(桩基式); 活动式平台:着底式平台(坐底式平台、自升式平台)、漂浮式平台(半潜式平台、钻井船、FPSO); 半固定式平台:牵索塔式平台(Spar):张力腿式平台(TLP) 2)海洋平台有哪几种类型?各有哪些优缺点? 固定式平台。优点:整体稳定性好,刚度较大,受季节和气候的影响较小,抗风 暴的能力强。缺点:机动性能差,较难移位重复使用 活动式平台。优点:机动性能好。缺点:整体稳定性较差,对地基及环境条件有要求 半固定式平台。优点:适应水深大,优势明显。缺点:较多技术问题有待解决 3)导管架的设计参数有哪些?(P47) 1、平台使用参数; 2、施工参数; 3、环境参数:a、工作环境参数:是指平台在施工和使用期间经常出现的环境参数,以保证平台能正常施工和生产作业为标准;b、极端环境参数:指平台在使用年限内,极少出现的恶劣环境参数,以保证平台能正常施工和生产作业为标准 4、海底地质参数 4)导管架平台的主要轮廓尺寸有哪些?(P54) 1、上部结构轮廓尺度确定:a、甲板面积;b、甲板高程 2、支承结构轮廓尺度确定:a、导管架的顶高程;b、导管架的底高程;c、导管架的层间高程;d、导管架腿柱的倾斜度(海上导管架四角腿柱采用的典型斜度1:8);e、水面附近的构件尺度;f、桩尖支承高程 5)桩基是如何分类的? 主桩式:所有的桩均由主腿内打出; 群桩式:在导管架底部四周均布桩柱或在其四角主腿下方设桩柱 6)受压桩的轴向承载力计算方法有哪些?(P93) 1、现场试桩法:数据可靠,费用高,深水实施困难; 2、静力公式法:半经验方法,试验资料+经验公式,考虑桩和土塞 重及浮力,简单实用; 3、动力公式法:能量守恒原理和牛顿撞击定理,不能单独使用; 4、地区性的半经验公式法:地基状况差别,经验总结。 7)简述海洋平台管节点的设计要求?(P207) 1、管节点的设计应降低对延展性的约束,避免焊缝立体交叉和焊缝过度集中,焊缝的布置应尽可能对称于构件中心轴线; 2、设计中应尽量减少由于焊缝和邻近母材冷却收缩而产生的应力。在高约束的节点中,由于厚度方向的收缩变形可能引起的层状撕裂 3、一般尽量不采用加筋板来加强管节点,若用内部加强环,则应避免应力集中 4、一般受拉和受压构件的端部连接应达到设计荷载所要求的强度。
海洋平台的现状和发展趋势 作者:荆永良 引言 海洋平台对海洋资源的开发和空间利用的发展,以及工程设施的大量兴建,对人类文明的演化将产生不可估量的影响。 正文 1、海洋平台技术概述 海洋工程项目是一个庞大的科技系统工程,而主要针对海洋石油开采而言的海洋工程装备包括油气钻采平台、油气存储设施、海上工程船舶等。这其中的海洋平台是集油田勘测、油气处理、发电、供热、原油产品储存和运输、人员居住于一体的综合性海洋工程装备,是实施海底油气勘探和开采的工作基地。 海洋平台结构复杂、体积庞大、造价昂贵,特别是与陆地采油设备相比,它所处的海洋环境十分复杂和恶劣,台风、海浪、海流、海冰和潮汐还有海底地震对平台的安全构成严重威胁。与此同时,由于环境腐蚀、海生物附着、地基土冲刷和基础动力软化、构件材料老化、缺陷损伤扩大以及疲劳损伤累积等因素都将导致平台结构构件和整体抗力逐渐衰减,影响平台结构的服役安全性和耐久性。因此,海洋平台的设计与制造只有在一个国家的综合工业水平整体提高与进步的基础上才能完成。 2、海洋平台的类型分类 (1)、按运动方式可分为固定式与移动式两大类(如图) (2)、按使用功能的不同可分为钻井平台、生产平台、生活平台、储油平台、近海平台等。 3、海洋平台的发展及现状 3.1国内海洋平台的发展及现状 我国海洋工业开始于60 年代末期,最早的海洋石油开发起步于渤海湾地区,该地区典型水深约为20 m。到了80 年代末期,在南中国海的联合勘探和生产开始在100 m 左右水深的范围内进行,直到现在,我国的油气勘探和开发工作还没能突破400 m 水深。近年来,石油、石油化工装备工业以我国石油和石油化工工业为依托,取得了长足的发展。尤其是近年来世界各国对石油能源开发的重视和原油价格的飚升,更是极大拉动了国内海上平台设备制
海洋大数据实验与实训平台技术规格及要求 一、主要技术要求和指标: 海洋大数据实验与实训平台包括:海洋大数据实验平台1套、深度学习算法训练平台1套。其中,海洋大数据实验平台提供海洋大数据的存储、分析、统计和可视化展示等。深度学习算法训练平台提供相关海洋数据的读取、处理及深度学习算法的训练等。 1海洋大数据实验平台(1套) 1.1海洋大数据存储与下载 海洋大数据实验平台能够对各种海洋数据文件等进行存储,并提供海洋数据管理页面和数据下载页面。 1.2海洋大数据统计和分析 提供海洋数据的统计和分析工具并提供源码。 1.3数据可视化展示 能够对海洋各种数据的统计和分析结果进行直观的可视化展示。 2深度学习算法训练平台(1套) 深度学习算法训练平台,需搭建深度学习开发环境,搭载多个主流深度学习框架,预置主流数据科学工具包及显卡驱动等,预置深度学习算法的训练工程及预训练模型。 二、项目实施要求 1项目实施周期要求 中标方需在合同签订后60日内,完成设备采购、安装、调试,并且配合完成所有“海洋大数据实验与实训平台”的联合安装调试。 2项目实施工作要求 2.1供货 中标人须在不迟于合同签订后的60个工作日内完成所有招标设备到指定地点的供货。投标人应确保其技术建议以及所提供的设备的完整性、实用性,保证平台及时投入正常运行。本技术规格书所规定的技术细节是对设计方案的建议,卖方应该保证最终的效果达到规格书上的主要技术要求和指标,若出现因投标人提供的设备不满足
要求、不合理,或者其所提供的技术支持和服务不全面,而导致平台无法实现或不能完全实现的状况,达不到规格书规定技术指标时,投标人负相应责任。 2.2安装调试 中标单位必须提供安装、配线以及测试和调整,施工过程由专业的调试人员进行安装、检测和排除故障。 2.3验收 设备到货后,用户单位与中标单位共同配合有关部门对所有设备进行开箱检查,出现损坏、数量不全或产品不符等问题时,由中标单位负责解决。根据标书要求对本次所有采购设备的型号、规格、数量、外型、外观、包装及资料、文件(如装箱单、保修单、随箱介质等)进行验收。设备安装完成,由中标单位制定测试方案并经用户确认后,对产品的性能和配置进行测试检查,并形成测试报告,包括负载测试。 2.4验收内容及标准 1. 海洋大数据实验平台(1套),海洋大数据实验平台能够对各种海洋数据文件等 进行存储,并提供海洋数据管理页面和数据下载页面。提供海洋数据的统计和分析工具并提供源码。能够对海洋各种数据的统计和分析结果进行直观的可视化展示。 2. 深度学习算法训练平台(1套) 深度学习算法训练平台,需搭建深度学习开发环境,搭载多个主流深度学习框架,预置主流数据科学工具包。预置深度学习算法的训练工程及预训练模型。 三、付款条件: 货到付款。 四、售后服务要求 在保修期内,如有产品故障问题,投标方需免费提供上门协助服务。在保修期结束前,需由投标方工程师和用户代表进行一次全面检查,任何缺陷必须由投标方负责修理,在修理后,投标方应将缺陷原因、修理内容、完成修理及恢复正常的时间和日期等报告给用户。免费维护期满后,投标方必须继续提供7*24应急响应,费用另行协商。
海洋工程各种平台分类与介绍 下面图文并茂简单介绍下海洋平台分类、钻井船、FPSO SEVAN平台,纯属胡扯,各位看官不要喷我,海洋平台简单可以分为以下2大类 (1)固定式平台:导管架式平台重力式平台 (2)移动式平台: 坐底式平台自升式平台半潜式平台张力腿式平台牵索塔式平 台 SPAR平台 第一个 导管架平台(Jacket),适用于浅近海。导管架平台可以看作最原始,最直接的将钻井设备与海底连接起来的措施。钢桩穿过导管打入海底,并由若干根导管组合成导管架。导管架先在陆地预制好后,拖运到海上安装就位,然后顺着导管打桩,桩是打一节接一节的,最后在桩与导管之间的环形空隙里灌入水泥浆,使桩与导管连成一体固定于海底。
重力式(混凝土)钻井平台: 混凝土重力式平台的底部通常是一个巨大的混凝土基础(沉箱),用三个或四个空心的混凝土立柱支撑着甲板结构,在平台底部的巨大基础中被分隔为许多圆筒型的贮油舱和压载舱,这种平台的重量可达数十万吨,正是依靠自身的巨大重量,平台直接置于海底。
坐底式钻井平台是早期在浅水区域作业的一种移动式钻井平台。平台分本体与下体(即浮箱),由若干立柱连接平台本体与下体,平台上设置钻井设备、工作场所、储藏与生活舱室等。钻井前在下体中灌入压载水使之沉底,下体在坐底时支承平台的全部重量,而此时平台本体仍需高出水面,不受波浪冲击。
自升式钻井平台(Jack-up)又称甲板升降式或桩腿式平台。这种石油钻井装置在浮在水面的平台上装载钻井机械、动力、器材、居住设备以及若干可升降的桩腿,钻井时桩腿着底,平台则沿桩腿升离海面一定高度;移位时平台降至水面,桩腿升起,平台就像驳船,可由拖轮把它拖移到新的井位。
海洋深水浮式平台现场监测研究进展? 屈衍1,季顺迎2,时忠民1 (1. 中海石油研究中心,北京 100027;2. 大连理工大学,辽宁大连 116023) 摘要:在深水油气田开发中,现场实时监测可为平台系统的作业生产提供实时的数据支持,并对平台设计方案进行校核与评估。平台监测系统已经逐步成为深水浮式平台完整性管理的重要系统之一。本文对国外已经开展的深水油气田开发中的浮式平台及立管、系泊系统的现场监测技术进行了归纳。选取了已有的浮式平台现场监测系统实例进行了分析。通过对国外深水油气开发中监测技术和经验的分析和归纳,对我国相关技术的应用将起到一定的促进作用。 关键词:现场监测;浮式平台;立管系统;系泊系统 1 前言 近年来,随着深水油气田开发的迅速发展,越来越多的深水浮式平台在美国墨西哥湾、欧洲北海、巴西海域和西非沿海等海域得到了应用。由于浮式平台结构形式复杂,发展历史相对较短,其设计,分析理论尚不完善。工程界对平台在实际海洋环境中的总体性能是否与设计结果相一致并没有完全的把握。在灾害海洋环境作用下,也发生了多起浮式平台破坏的事故。如墨西哥湾2005年Katrina和Rita飓风中,约16座浮式钻井平台发生平台移位及系泊系统损坏[1],TLP平台Typhoon在Rita飓风过后倾覆等。为了改进善这一现状,石油公司大力发展了浮式平台系统的完整性管理技术(FSIM,Floating System Integrity Management)。其主要任务是通过对平台系统现场监测和平台检测,得到平台在实际海况作用下的响应,进而制定符合现场情况的平台操作策略,改进新平台的设计方法,同时对平台在灾害环境下可能发生的风险进行更为准确的评估。[2 OTC 20137] 浮式平台系统的现场监测是完整性管理技术中的核心部分,其主要作用可以归纳为:为平台设施的安全操作提供数据;评估、校核平台的在位表现;缩短平台灾害环境下的关断时间,降低损失;准确评估平台未来可以承受的回接能力;为平台破坏后涉及法律事务提供数据支持[3 OTC 18626]。鉴于现场监测的重要性,目前,几乎所有的浮式平台系统都已经安装了现场监测系统。 我国海洋石油工程正处在由浅水到深水的跨越阶段,国家正在积极进行南海深水开发的技术储备,并已经开始建造针对南海的3000米水深半潜式钻井平台。鉴于南海目前仍没有深水作业的浮式平台,因此,需要同步发展浮式平台监测技术,对南海海洋环境作用下的浮式平台响应进行测量。为建立针对南海海域的浮式平台完整性管理系统进行技术积累。 考虑到深海现场监测的方案和部分设施需要在平台设计和建造前进行确定,以便在陆上进行前期工作。因此,在我国深海油气平台开发建造前就应对现场监测的方案、原理和技术进行深入系统的分析整理。为此,本文针对国际上深水浮式平台现场监测的主要工作进行了回顾,对现场监测的实施方案以及关键技术进行了分析总结,其目的主要是收集当前深水油气开发工程中的现场监测方案和技术、整理相关的监测经验,为我国开展深海油气中的现场实时监测技术提供依据。 本文首先对深水海洋环境、浮式平台结构系统、系泊系统、立管系统监测技术进行介绍,对IMMS系统及IRMS系统技术进行总结,并选取几个在浮式平台上开展的实际监测项目内容进行介绍。 2 浮式平台结构的现场实时监测 目前的深水浮式生产平台形式可以概括为三大类:张力腿平台(TLP)、深吃水立柱式平台(SPAR)、半潜式平台(SEMI)。对于深水浮式平台结构的实时监测主要是对运动和位置进行测量,以确定其与附属的立管、系泊/张力腿系统的相对运动和作用力。 对于平台的运动和位置一般测量其6个自由度上的运动响应,其中平台的平动分量通常采用3个线加速度计测量,转动分量用3个高精度角速度计进行测量。浮式平台的平动周期通常为20 s以上或者更高。 采用加速度传感器,安装的位置一般要避免平台振动的影响。 此外,GPS定位系统也一种有效的测量平台运动的有效方法。如果测量平台的准静态倾角,最精确的办法就是采用倾角仪\倾斜计。 由于结构动力特性的不同,因此在对平台结构进行运动和响应监测时应有针对性地选用不同特性的传 资助项目:国家重大专项课题资助项目(2006AA09ZX026-002). 作者简介:屈衍(1977-),男,辽宁辽阳人,博士,工程师,主要从事海洋工程和工程力学专业研究。
海洋平台基础知识系列 0. 海洋工程是什么?(名词解释) Ocean engineering 海洋工程,从地理的角度来说,可分为海岸工程、近岸工程(又称离岸工程)和深海工程三大类。一般来说,位于波浪破碎带一线的工程,为海岸工程;位于大陆架范围内的工程,为近岸工程;位于大陆架以外的工程,为深海工程,但是在通常情况下,这三者之间又有所重叠。从结构角度来说,海洋工程又可分为固定式建筑物和系留式设施两大类。固定式建筑物是用桩或者是靠自身重量固定在海底,或是直接坐落在海底;系留式设施是用锚和索链将浮式结构系留在海面上。它们有的露出水面,有的半露在水中,有的置于海底,还有一种水面移动式结构装置或是大型平台,可以随着作业的需要在海面上自由移动。 海洋工程是指以开发、利用、保护、恢复海洋资源为目的,并且工程主体位于海岸线向海一侧的新建、改建、扩建工程。具体包括:围填海、海上堤坝工程,人工岛、海上和海底物资储藏设施、跨海桥梁、海底隧道工程,海底管道、海底电(光)缆工程,海洋矿产资源勘探开发及其附属工程,海上潮汐电站、波浪电站、温差电站等海洋能源开发利用工程,大型海水养殖场、人工鱼礁工程,盐田、海水淡化等海水综合利用工程,海上娱乐及运动、景观开发工程,以及国家海洋主管部门会同国务院环境保护主管部门规定的其他海洋工程。 1: 海洋平台的类型: 海洋平台:(1)移动式平台: 坐底式平台 自升式平台 钻井船 半潜式平台 张力腿式平台 牵索塔式平台 (2)固定式平台:导管架式平台 重力式平台固定平台又可以分为桩式海上固定平台、重力式海上固定平台、自升式海上固定平台 导管架型平台:在软土地基上应用较多的一种桩基平台。由上部结构(即平台甲板)和基础结构组成。上部结构一般由上下层平台甲板和层间桁架或立柱构成。甲板上布置成套钻采装置及辅助工具、动力装置、泥浆循环净化设备、人员的工作、生活设施和直升飞机升降台等。平台甲板的尺寸由使用工艺确定。基础结构(即下部结构)包括导管架和桩。桩支承全部荷载并固定平台位置。桩数、长度和桩径由海底地质条件及荷载决定。导管架立柱的直径取决于桩径,其水平支撑的层数根据立柱长细比的要求而定。在冰块飘流的海区,应尽量在水线区域(潮差段)减少或不设支撑,以免冰块堆积。对深海平台,还需进行结构动力分析。结构应有足够的刚度以防止严重振动,保证安全操作。并应考虑防腐蚀及防海生物附着等问题。导管架焊接管结点的设计是一个重要问题,有些平台的失事,常由于管结点的破坏而引起。管结点是一个空间结点,应力分布复杂;近年应用谱分析技术分析管结点的应力,取得较好的结果。 混凝土重力式平台的底部通常是一个巨大的混凝土基础(沉箱),用三个或四个空心的混凝土立柱支撑着甲板结构,在平台底部的巨大基础中被分隔为许多圆筒型的贮油舱和压载舱,这种平台的重量可达数十万吨,正是依靠自身的巨大重量,平台直接置于海底。现在已有大约20座混凝土重力式平台用于北海 钻井船是浮船式钻井平台,它通常是在机动船或驳船上布置钻井设备。平台是靠锚泊或动力定位系统定位。按其推进能力,分为自航式、非自航式;按船型分,有端部钻井、舷侧钻井、船中钻井和双体船钻井;按定位分,有一般锚泊式、中央转盘锚泊式和动力定位式。浮船式钻井装置船身浮于海面,易受波浪影口向,但是它可以用现有的船只进行改装,因而能以最快的速度投入使用。适用于深海钻井的主要是两种浮式钻
深水浮式平台的类型 深海有着强大的油气资源储备。不断涌现的各种新型采油平台技术促进着深海采油技术的高速发展,这些技术概括起来可分为四大类:张力腿式平台(TLP),单筒式平台(SPAR),半潜式平台(SEMI)和浮(船)式生产平台(FPSO)。在每一大类中,又有很多不同的技术概念。下面就不同型式的平台使用和特点分别做介绍。 图1:深水平台类型 一、深海张力腿平台的发展概况及发展趋势 图2:张力腿平台的发展
自1954年美国的P.D.Marsh提出采用倾斜系泊方式的索群固定的海洋平台方案以来,张力腿平台(TLP)经过近50年的发展,已经形成了比较成熟的理论体系。1984年第一座实用化TLP——Hutton平台在北海建成之后,TLP在生产领域的应用也越来越普遍,逐渐成为了当今世界深海采油领域的两大主力军之一(另一种当前广泛使用的深海采油平台是Spar,将在后面部分中进行详细介绍)。 进入上个世纪90年代之后,TLP平台的发展进一步加速,在生产区域方面,TLP的应用已经从北海和墨西哥湾扩展到了西非沿海;在平台种类方面,TLP已经在原有的传统类型TLP基础上,发展出了Mini-TLP、ETLP等多种新概念张力腿平台,加之不断地采用最新地科学技术,TLP平台在降低成本,提高适应性、稳定性和安全性地道路上取得了长足地进步。下面将简要介绍张力腿平台的总体结构,然后对1990年之后TLP平台的发展状况进行详细的论述。 1、张力腿平台总体结构简介 张力腿平台(Tension Leg platform,简称TLP)是一种典型的顺应式平台,通过数条张力腿与海底相连。张力腿平台的张力筋腱中具有很大的预张力,这种预张力是由平台本体的剩余浮力提供的。在这种以预张力形式出现的剩余浮力作用下,张力腿时刻处于受预拉的绷紧状态,从而使得平台本体在平面外的运动(横摇、纵摇、垂荡)近于刚性,而平面内的运动(横荡、纵荡、首摇)则显示出柔性,环境载荷可以通过平面内运动的惯性力而不是结构内力来平衡。张力腿平台在各个自由度上的运动固有周期都远离常见的海洋能量集中频带,一座典型的TLP,其垂荡运动的固有周期为2~4s,而纵横荡运动的固有周期为100~200s,这就避免了调和共振的发生,显示出良好的稳定性。 一座典型的TLP平台的总体结构,一般都是矩形或三角形,平台上体位于水面以上,通过4根或是3根立柱连接下体,立柱为圆柱型结构,主要作用是提供给平台本体必要的结构刚度。平台的浮力由位于水面之下的沉体浮箱提供,浮箱首尾与各立柱相接,形成环状结构。张力腿与立柱呈一一对应,每条张力腿由1~4根张力筋腱组成,上端固定在平台本体上,下端与海底基座模板相连,或是直接连接在桩基顶端。有时候为了增加平台系统的侧向刚度,还会安装斜线系泊索系统,作为垂直张力腿系统的辅助。海底基础将平台固定入位主要有桩基或是吸力式基础两种形式。中央井位于平台上体,可以支持干树系统,生产立管通过中井上与生产设备相接,下与海底油井相接。 张力腿平台的总体结构特点,使它在深海作业具有运动性能好,抗恶劣环境作用能
专题 2019^5 月8门 14:13:10 肋水深娈化门势 a 港口运维大数据辅助决策 在线管理平台数据中心(国华台电) 上煎片“廉1 ? //// OhM lbb/? -----3 ShH 166? 港口运维大数据辅助决策在线管理平台 国华电台已安全运行 :€?R 0 次 邦鑫打造海洋大数据平台系列项目 赋能智慧海洋产业 文丨《海洋与適业》记者孔一颖 o /X a 年丿东海洋 w u I 大数据产业 中有几件值得关注的大事,包括港口 运维大数据服务平台的应用,粤东沿 海海洋立体监测体系和网格化管理示 范应用,海洋牧场自动化监测等。这 些项目,均出自广东邦鑫勘测科技股 份有限公司(以下简称邦鑫)。与前几年热议的“互联网+”概 念相似,在邦鑫副总裁、总工程师曾 强博士看来,只要前端数据能够打通, “智慧海洋+”也就有着无限的应用 可能。例如邦鑫正在建设的港口运维 大数据服务平台,其可以通过对自有 数据和公开数据的分析,实现通航安 全辅助分析、优化船舶进出港安排、 提高港口利用率、科学制定疏浚方案 等,真正实现智慧港口运营。打造广东海洋大数据综合平台 2018年初举行的广东海洋大数 据建设圆桌峰会上,邦鑫广东海洋大 数据综合平台首次亮相:对此.曾强 博士解释说,所谓广东海洋大数据综 合平台.是基于陆海空天立体海洋物 联网感知监测体系.构建海洋环境大 数据云服务平台,充分整合海洋环境、 渔业、港口等信息资源,汇集海洋环 境、经济、管理等大数据.建立智慧 海洋分析、评价、应用、服务模型, 提升海洋行业科学决策能力与管理水 平.提高政府海洋政策文件编制的科 学性,促进海洋产业发展,增强行业 公众服务能力。 也就是说,广东海洋大数据综 合平台是通过整合数据,建立起智慧 海洋分析、评价、应用、服务模型, 以此满足各种工作需要: 目前,该平台完成了基础性支 撑服务、业务引擎、地图引擎的构建; 在国家海洋大数据框架体系的基础 上,初步形成了广东省海洋大数据资 源目录体系.通过许可、授权等方式 保证了数据的安全;构建了海洋数据 共享和交换平台.为海洋数据的ETL 过程.提供了自动化的处理过程,让 数据的转换、清洗和加工处理变得更 简单、更智能:此外,基于微服务的 系统架构体系,该平台还支持云端化 186
大数据时代海洋信息技术发展探究 作者:张春艳蔡梦凡 来源:《办公室业务(上半月)》 2018年第3期 文/东海信息中心张春艳蔡梦凡 【摘要】随着互联网技术的发展,我们逐步迈入了大数据时代,无疑给我们传统的生活和 工作带了巨大冲击,如何将人们从繁重的信息处理中解放出来将是一件刻不容缓的事情。笔者 凭借多年在东海信息中心的工作经验,对大数据时代如何提高工作效率和解放劳动力进行了分 析总结,旨在减轻档案信息管理者的工作压力。 【关键词】大数据时代;信息处理;效率提高;劳动力解放 海洋信息涵盖了海洋环境、海洋资源、海洋开发等其他与海洋有关的科学数据,包括影音、图片、文字等,其具有数据量大、种类繁多、分散严重(空间上或时间上)、实时性高等特点,传统的信息管理方式早已不堪重负。笔者从科学技术是第一生产力的指导思想出发,坚持与时 俱进,坚持数字化和网络化的海洋信息管理,对信息采集、筛选、入库、调取和分析等进行了 优化,并给出了以下管理意见。 一、大数据下的海洋信息管理 海洋信息数据主要来源于航空遥感、卫星遥感、海洋调查船、海洋台站和海洋数据浮标、 海床基等,多样化的探测手段增大了信息集中管理的难度,为将时间上或空间上分散的海洋信 息进行汇总,数据库的建立需注意以下原则: 数据要统一格式,使其简单、易读、便取用,对于来源不同的数据要统一格式,建立恰当 的数据接口。各数据库的关系应如人身一样,表面上各器官分布杂乱无章,实则彼此关联相辅 相成,各器官的有序配合,实现了身体这个机构的灵活运转。大数据下的海洋信息应做到如臂 使指一样轻松自如,随时为海洋管理决策者提供当下最新、最权威的海洋信息。 保持文件个体的独立性,移动过程中不会造成文件的缺失与损坏,对于关联文件一定要特 殊处理,如超链接、文内标注、调用全局通用信息等。为便于输送和保存,有时需对大文件进 行拆分,若能保持各文件较好的独立性,当某一部分数据缺失损坏时,我们不需要对全局所有 文件进行更新,只要找到错误文件位置,然后对坏掉部分像外科手术一样进行切除更换即可。 对必要的硬件设备进行更新,建立传感器与数据库的多通道自动传输,及时将传感器采集 到的海洋信息(温度、盐度、PH等)反馈回电脑,建立数据统计实时监控,根据局部采样建立 全局信息预测,实现大数据的实时、大规模、快速处理与交互分析。 二、大数据下的信息共享 海洋信息是为我国海洋业务发展而服务的,服务平台一方面要供管理人员维护更新,另一 方面,要为用户提供方便快捷的数据交互。数据的调用需建立多级共享渠道,避免数据在某一 渠道大量堆积,这样不利于信息的录入与调用,严重影响工作效率。此外,提到共享我们不得 重视与之密切相关的安全保密,信息安全是我们利益的保证。 个人建议将各部门工作都要用到的重要文件建立一个总的全局工作平台,将各文件设置保 密级别,个人凭借私人专用密码,一人一号进行调阅浏览,当用户的保密级别低于文件的保密 级别则不予调用。一旦发生文件泄密丢失,可以凭借个人账号浏览记录进行查询,或者对浏览
《深水海洋平台结构用钢板》 行业标准编制说明 《深水海洋平台结构用钢板》行业标准项目组 二〇一一年月
《深水海洋平台结构用钢板》 行业标准编制说明 1 工作概况 1.1 任务来源 工信部以工信厅科[2010]74号]工业和信息化部关于印发2010第一批行业标准制修订项目计划的通知》,为冶金行业标准--《深水海洋平台结构用钢板》。项目编号为“2010-0309T-YB”。由湖南华菱湘潭钢铁有限公司等单位承担制定。 1.2项目调研情况 海上石油钻井平台的类型很多,大体可以分为固定式(FPSO)和移动式2类。 固定式钻井平台包括桩基(导管见架)式和重力式;移动式钻井平台包括坐底式、自升式、半潜式和钻井船。 我国深度在300m以上的海域有关53万M2深海油气,目前只勘探16万M2深海油气,有90%还没有勘探,所以未来深渊油气开发将成为中国海洋油气的主战场。 目前,我国有14个海上油田采用了FPSO,拥有数量排名世界第2,是世界上拥有新FPSO数量最多的国家。与国际同行相比,我国自行研制了抗冰型、浅水型和抗台风型共8艘新FPSO,其整体研制水平为世人瞩目。 高强度海洋工程用钢板对钢材的性能有比较特殊的要求,首先,实际应用时厚板的需求量较多,同时要求厚板沿厚度尺寸性能要均匀,厚度效应要小,同时对Z向性能、疲劳、断裂性等都有严格的要求;其次,一般情况,钢板要求保证-40℃的冲击性能,如在严寒地区使用甚至要求-60℃的冲击韧性,在如此低温的条件下保证冲击性能,对材料的组织结构将会有更高的要求。 国外有EN10225欧盟标准规定了深水海洋平台用结构钢的化学成分、力学性能、焊接性能、无损探伤、CTOD等试验项目、技术要求。但目前国内暂没有生产厂按此标准生产和交货。 目前,我国湖南华菱湘潭钢铁有限公司、舞阳钢铁公司、鞍钢、宝钢等已能够生产适应国家近海深水油田开采所需的各类海洋平台用钢,并成功地应用于渤海油田、胜利油田、南海油田等海洋平台。他们所采取的技术措施主要有:1、低碳当量。在生产过程中制订了严格的碳当量范围,保证达到高强钢焊接碳当量小于0.43%的标准。2、微合金化。采用Nb、V、Ti等微合金化处理,充分发挥微合金元素细化晶粒和沉淀强化的作用,保证钢板具有足够的强度和良好的韧性。3、高纯净度。通过炉外精炼、真空处理等方法,使钢质洁净度达到P≤0.010%,S≤0.005%的水平,可确保钢板厚度方向断面收缩率≥35%,使钢板具有良好的抗层状撕裂性能。4、Ca处理。通过Ca处理,选择恰当的Ca/S比,使夹杂物球化,减轻夹杂物对钢板综合性能的不良影响。5、采用控制轧制、控制冷却工艺(TMCP工艺)。通过将控制轧制工艺与成分设计相配合,使组织充分细化,并通过形变诱导Nb、V、Ti的碳氮化物沉淀,提高基体的强度。 1.3标准编制的主要工作过程及工作计划 ⑴湘钢于2011年2月进行了起草标准的数据收集、情况调研、问题分析等准备工作,4月底前,形成行业标准(草案)。 ⑵2011年4月底前:发出标准征求意见稿--征求上级标准主管部门、生产和顾客行业代表企业及研究院所意见,根据反馈意见的汇总处理结果,确定征求意见(二稿)或(讨论稿)。 ⑶2011年6月底前:针对行业标准征求意见(二稿)的反馈意见,进行必要的修改工作,形成国内
海洋平台设计原理课程教学大纲 课程代码:74120610 课程中文名称:海洋平台设计原理 课程英文名称:Principles of Offshore Platform Design 学分:3.0 周学时:3.0-0.0 面向对象: 预修要求:统计学、结构力学 一、课程介绍 (一)中文简介 本课程就各式海洋平台特性,介绍其设计要点和设计程序,特别强调设计方法论,包括极限状态设计法、板壳结构之极限强度分析、海洋平台之波浪负荷分析;海洋平台的疲劳强度分析及可靠度设计法;设计分析中不确定因素的分类处理与机率方法;海洋平台的寿期安全设计法。透过课程的理论与方法学习和实践训练,使学生可系统地了解和掌握平台设计的结构强度、结构使用寿命和平台结构运营期间的安全可靠度。同时具备应用统计学和可靠度理论计算平台结构特征负荷的能力;应用结构力学知识分析平台结构极限强度和疲劳强度的能力;以及综合评估平台使用寿命和寿期可靠度的能力。 (二)英文简介 The main items and the procedure related to the design of various offshore platforms are demonstrated in the course.The design method dologies are particularly emphasized.Inwhich,the syllabus encompasses the limit-state method of design,the analysis theory of the ultimate of design,the analysis theory of the ultimate strength of plate and shell structures,analysis theory of characteristic wave loads sustained by offshore platforms,complete reliability design method in considering fatigue strength,categorization and probability method used in dealing with the uncertainty factors encountered in designs,and the life-cycle reliability design method. Through the theoretical and methodological studies and the practice of
xx平台技术的现状及发展方向 xx,xx,xx 摘要: 随着我国工业化进程的日益加快,社会各领域对能源资源的利用越来越多。为了缓解我国能源资源利用紧张的局面,国家加快了对海底油气资源的开发。在对海底资源进行开采施工时,必然会用到海洋钻井平台。为了实现对海洋油气资源的科学、高效和可持续性开发,海洋钻井平台技术的发展和改进就更具备必要性和迫切性。本文就在概述海洋钻井平台技术的基础上,对其现状、发展趋势以及一些新型平台进行着重地分析。 关键词: 海洋平台;技术现状;新型Spar平台;发展趋势 基于当前我国对陆上和海上油气资源 开采量严重不平衡的现状,加紧对xx油气 资源的开发和利用,不仅能缓解我国能源资 源利用紧张的现状,还能进一步完善我国的 能源开采结构。xx钻井平台技术的发展, 是xx能源开采的重要环节。完善钻井平台 技术,不仅能为实现采油的安全施工,还能 展现我国在xx技术应用方面的能力和技 术水平。所以,加强对钻井平台技术的现状 和发展趋势研究具有很大的现实意义。 当前,我国xx油气发展存在的三大
矛盾主要是: 加快发展速度与资源短缺的矛 盾;环境友好型社会与环境污染等问题的矛盾;提高国际竞争力与国内创新能力薄弱的矛盾。欲解决这三大矛盾,加快海上油气开发和发展xx石油装备工业已成为重要举措。国际油价的进一步攀高,使得油气资源供应不足阻碍经济发展的这一矛盾更加突出。提高油气资源的产量,xx油气的开发 已经成为我国实现能源可持续发展的战略重点。xx石油钻井装备产业是以资本密集和技术密集为主要特征,为xx油气资源开 发提供生产工具的企业集合,是xx油气 产业与装备制造业的有机结合体。 1xx平台技术概述 xx钻井平台是进行xx油气开采的 主要设备,在实际的应用中,主要是用来支撑和存放巨大的钻机、为钻井人员提供居住地点、对开采的原油进行存储等。相比较具体的油气存储设备以及诸多的海上工程船舶,xx钻井平台的存在更具基础性作用。