(二)地铁运行的宗旨
地铁运行是一个具有规律性的动态过程。这个动态过程中要避免各种不利因素影响和给正常运行造成不良后果。如人的因素、设备因素、环境因素等。每位参与地铁运行的工人员必须时刻牢记“安全第一、便民第一”的运营宗旨.确立安全行车和服务乘客的思想意识。
1 .强化行车安全思想意识
行车安全一般是指地铁列车在运送乘客的过程中对行车人员行车设备以及乘客产生作用和影响的安全。行车安全的质量指标成为衡量城市轨道交通管理水平的重要环节和内容。确保运行安全成为我们列车司机工作的重中之重,成为列车运行的永恒主题。2 .树立社会服务意识
由于地铁有着其他交通工具所无可比拟的优越性,地铁已经成为市民出行的重要交通工具。我们只有真正树立社会服务意识,真诚为乘客服务,才能树立良好的企业形象、增强企业的竞争力。
行车安全和服务社会是相辅相成、相互联系的。如果没有列车运行的安全,服务社会就将是一句空话;而如果没有真正树立社会服务意识,缺乏为乘客服务的思想观念,就不可能切实、完整地做好行车安全工作。
(三)影响行车安全的重要因素1 .违章行车的基本分类与危害性违章行车是指列车驾驶员在值乘、出勤或操纵列车运行过程中与有关安全规定、运行规定、行车纪律等的要求相违悖的行为。
(1)违章行车的基本分类按照违章行车实施时的意识倾向可以把违章分为有意识的和无意识的违章。有意识的违章一般是指列车驾驶员在明知其行为触犯有关规定的情况下,存在着侥幸心理而实施的违章;无意识的违章一般是指列车驾驶员由于在技术业务上或经验上的缺陷而产生的没有知觉的违章。按照违章行车的后果和程度可以分为严重违章和一般违章。严重违章是指在违章行为的实施过程中,可能或者已经对行车安全构成威胁和影响的违章;一般违章是指在违章行为的实施过程中,没有对行车安全产生直接威胁和影响并且情节比较轻微的违章。按照列车驾驶员值乘列车的过程可以把违章分为值乘准备阶段违章、操纵列车阶段违章和退勤阶段违章。值乘准备阶段的违章是指列车驾驶员在出勤后至列车动车前进行各种值乘准备过程中产生的违章行为;操纵列车阶段违章是指列车驾驶员在操纵列车运行过程中产生的违章行为;退勤收车阶段违章是指列车驾驶员在退出列车运行进行各项退勤以及收车辅助工作时产生的违章行为。
序号1:司机警惕试验按钮TDMPB(黑色)操作模式:列车静止,模式选择开关处于CM/RMF/WM/RMR位,连续按下按钮超过5秒钟:列车触发紧急制动。序号6:解钩按钮(UNPB),带白色灯,在当前司机室按下该按钮,该灯点亮,全自动钩打开。以RMR向后驱动列车,再次按下该按钮,按钮灯灭,然后停车。序号7:唤醒按钮(WUPB)。当列车处于休眠状态时,按下该按钮,电池回路接触器闭合,列车唤醒,启动自检。序号8:休眠带灯按钮(SPB)。当列车处于唤醒状态,司机首先将模式选择开关置于“OFF”位,降弓或断开车间电源插座(WOS),将司机控制钥匙KS置于“OFF”位后按下该按钮,黄色灯点亮20秒钟,后熄灭,列车进入休眠状态。
序号1:双针压力表(MNI),一个红的,一个白的。一个红色指针和一个白色指针,红指针指示主风缸的压力。白色指针指示A车前端转向架的平均制动缸压力,范围为0到16BAR。序号2:电压表(VMI)。司机可通过电压表查看蓄电池电压,范围为0到140V。序号6:所有常用制动缓解指示灯(ABAI)。施加时红灯亮。序号1:关A侧门(左侧门)带灯按钮(DCPB1—A)。(红色指示灯点亮时表示至少一个门未关上)序号2:带4个位置的受电弓控制开关(PCS),即:“无”(双弓处于降弓状态),“前”位(前弓升,后弓降),
“升双弓”位(前后受电弓升起),“后”位(前弓降,后弓升)。序号3:开A 侧门(左侧门)带灯按钮 (DOPB1—A )(ATP 允许开门时绿色指示灯亮,如果ATP 故障隔离开关处于“隔离”位时指示灯不亮)
序号7:公共广播激活按钮 (ACUPB3)按下个按钮可对所有的乘客广播信息。序号8:乘客应急通讯激活按钮 (ACUPB2)按下该按钮接受PECU 的对讲要求,然后按下PTTPB 对讲。序号9:司机室对讲按钮 (ACUPB1)按下该按钮启动或结束同另一个司机室的对话序号3:用于限制“RM ”模式按钮(红色) 当ATP 触发一个紧急制动后缓解紧急制动。
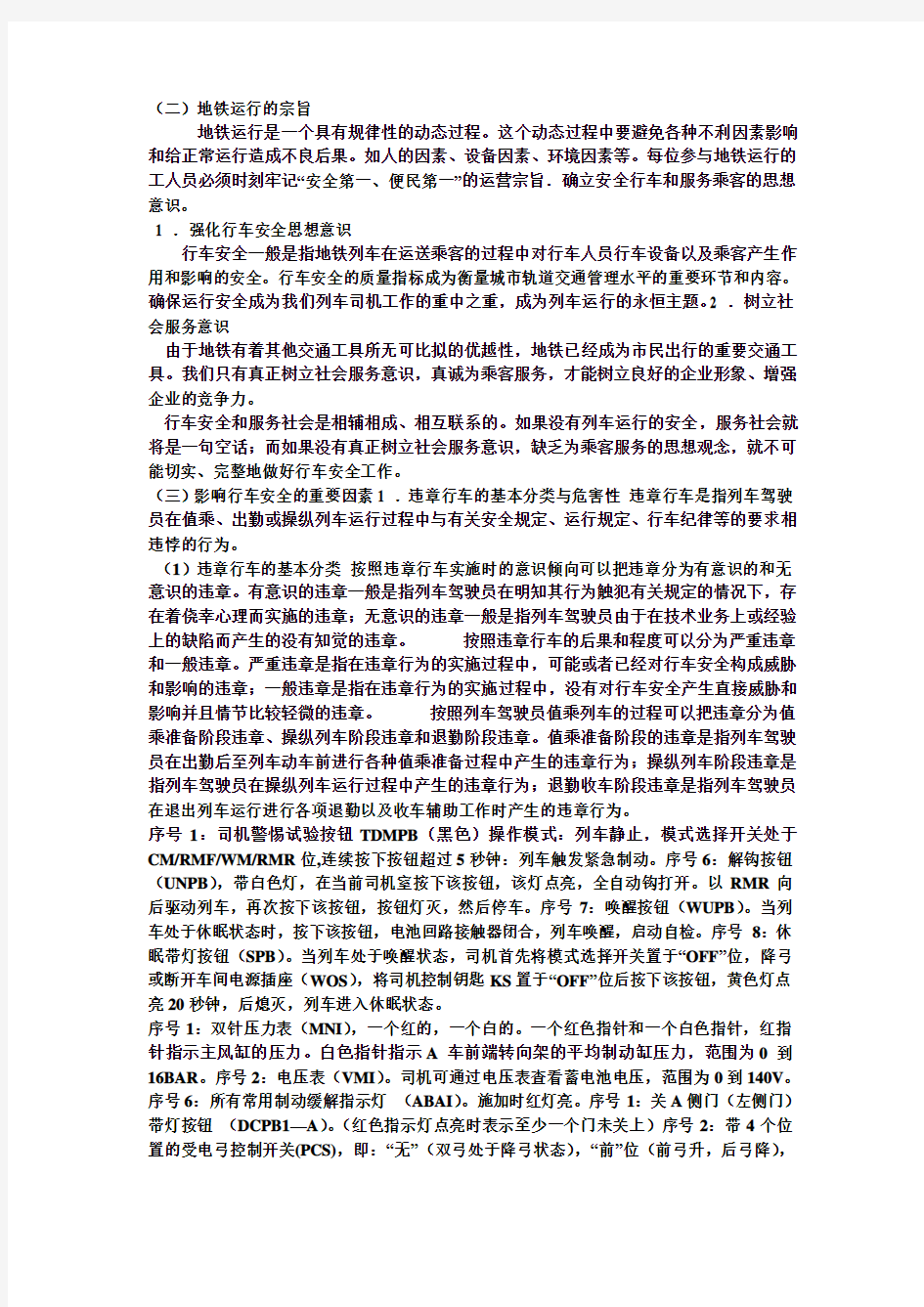
司机控制器,它是由列车运行模式选择的机械结构组成, 带ON/OFF 二个位置的司机控制钥匙: 一个解锁模式选择开关(MS )的电磁装置。模式选择开关(MS )。 驾驶控制手柄(DCH )
司机钥匙司机钥匙有两个位置:ON 和OFF . 如果两司机室的司机钥匙都在“OFF ”位,则MS 被锁于“OFF ”位,DCH 被锁于“惰行”位。当一个司机钥匙置于“ON ”位时,相应变为:在激活的当前司机室,“MS ”和“DCH ”解锁,同时另一司机室的“KS ”锁于“OFF ”位。对于在反向轨道上司机按下自动折返按钮后列车由ATC 监控并无人驾驶的情况下司机钥匙被旁路。 注意:在未激活的司机室,除下列功能外司机台的其它功能被锁。1紧急制动按钮。◆司机室灯开关。◆ 司机室空调开关。◆ 司机室间通讯。
模式选择开关 该设备有六个位置,分别为:“RMR ”、“OFF ”、“WM ”、“RMF ”、“CM ”和“ATO ”。司机可通过该设备选择不同驾驶模式和列车方向。
驾驶模式定义如下:ATO :所有牵引和制动功能都由车载ATO 设备根据速度曲线处理。 钥匙开关(KS)
(DCH)
司机的控制仅限于关门和乘客上车后发出牵引允许(ASPB按钮)。自动列车保护(ATP)设备执行列车限速,列车间安全距离和停站点。该模式是列车线路允许的主要模式。此时DCH被锁于惰行位。CM:司机根据司机室的指示控制列车但此时由车载ATP 设备连续监控,该模式会在一段时间内用于训练司机。CM位置需要限缓解紧急制动。RMF或RMR:司机在调车区域或车库根据线路旁信号控制列车。列车速度受限(对于限制向前RMF模式25公里/小时;对于限制向后RMR模式位10公里/小时)。如果ATP需要会触发紧急制动(如闯红灯)
WM:该模式用于车库联挂列车、洗车时移动列车,该模式速度由牵引控制系统限制在一个很低的数字(如3公里/小时)。
当列车处于运行状态时,可在没有触发紧急制动的情况下实现从“WM”模式向“RMF”,从“RMF”模式向“CM”,从“CM”模式向“ATO”,从“ATO”模式向“CM”,从“CM”模式向“RMF”,从“RMF”模式向“WM”间的转换;但从“WM”模式向“RMR”间转换必需经过“OFF”位,会触发紧急制动。
驾驶控制手柄DCH驾驶控制手柄DCH为滑动式,其手柄沿车辆的轴线的平行方向移动。当模式选择开关MS处于“OFF”位时,驾驶控制手柄DCH被机械闭锁不能移动,将驾驶控制手柄DCH向前推动就产生牵引要求,列车开始加速直到模式选择开关的限速。由前向后推将驾驶控制手柄DCH向后推过惰行位立即触发机械的和/或电气的制动,产生制动力。在制动区的末端,到达槽口位置就到达最大常用制动位。将驾驶控制手柄DCH推到最大常用制动槽口位就触发快速制动,在列车未停下之前可将驾驶控制手柄DCH从最大常用制动位移开。
在驾驶控制手柄DCH的上部部件就是司机警惕按钮(DMS)。除了停站和ATO驾驶模式外,如果司机将司机警惕按钮(DMS)放手超过2秒钟就自动触发紧急制动。
一、列车唤醒
1.列车通电以前的检查,确保高低压切除和停车制动施加。在列车送电前,必须警告
在列车上工作的所有人。
2.司机上司机室后,按唤醒列车控制按钮(WUPB)准备列车。
3.DDU初始化和自检开始。DDU初始通电期间,显示器是黑屏,一旦DDU初始化成
功,屏幕显示“Autotest Running”,同时DDU开始启动自检定时器。然后,从自检页面转到准备页面。
4.司机通过看列车“列车准备页面”显示,监控列车准备情况,所有连接在TIMS上
的设备然后自检。
5.几分钟后,如果发现故障,蜂鸣器响起,司机可查看故障类型,然后进入列车操作
菜单。找出故障部位,并利用“列车事件和故障”按钮找出相应的指导建议,司机必
须确认所有故障6.如果低压供电正常工作,DDU上显示出所有的“列车供电接触器”闭合。7.然后将主控制器钥匙转至“接通位”。8.当前司机室出现“列车准备”
菜单9.司机把受电弓控制按钮放到“升双弓”位。10.如果受电弓工作正常,那么几秒钟后在DDU上显示2个受电弓升起,并显示高压供电。11.如果辅助逆变器CVS 工作正常,中压在显示屏上显示“OK”。12.如果制动系统和门控系统正常工作,压力开关处于闭合状态,“所有制动施加”开关闭合,“所有门关到位”开关闭合。13.
将司机后面的面板上客室空调开关打开。现在列车准备就绪14.司机用ATC信号屏输入旅程号并在DDU上显示出来。
二、不同模式下的操纵
只有“关门”按钮灯熄灭和“所有门关到位”灯点亮,司机才允许开动列车。
1. MS 在ATO位
ATC分为带安全功能的ATP和不带安全功能的ATO。ATP监测ATO的工作。某些ATO 的功能与司机按钮和司机手柄的功能上并列的。ATC控制列车移动、指定开门侧和达到站台时发出允许开客室门功能。而且,它还提供零速信号和限速速度。
?此模式下警惕按钮旁路。
?司机必须关上客室门。
?ATO模式启动列车需3个条件:
a. 客室门关上并或锁上(“门关到位”指示灯点亮)。
b. ATO启动灯ASPB1 和ASPB2点亮绿色。
c. 司机按下ATO启动按钮(ASPB)的同时给出允许自动发车指令。
当列车在运行中不能定位(得不到位置信息)会触发紧急制动。一旦列车停下,司机必须:?按下限速模式RM按钮,缓解紧急制动。
?将模式开关MS置于“CM”位。
?将司机手柄DCH推到制动区。
?按下司机台N4板上的缓解列车紧急制动。
?将模式开关MS置于“ATO”位。
2 .MS 在CM手动位
?司机使用DCH减速和加速。目标速度显示在信号屏上。如果当前速度超过目标速度,那么ATP会启动告警。如果司机不采取减速,ATP将触发紧急制动。
?在列车运行期间,司机警惕按钮DMD必须工作正常且压下。如果司机警惕按钮释放超过3秒,将触发紧急制动。
?如果司机没有遵照轨道信号驾驶,ATP将施加紧急制动。
?当列车在运行中不能定位(得不到位置信息)会触发紧急制动。
3 降级模式:MS置于“RMF”
“RMF”为向前限速,ATP起作用。
该驾驶模式与“CM”模式相同,只不过在列车时度达到25公里时,牵引力取消。在带铅封的重大旁路控制开关VCBS置于车门安全回路旁路位置时,必须采用“RMF”和“RMR”驾驶模式。
允许打开哪侧车门由ATP给出。
在没有触发紧急制动的情况下可实现从“CM”模式到“RMF”模式,从“RMF”模式到“CM”模式的转换。
4.降级模式:MS置于“RMR
“RMR”为向后限速,ATP起作用。
司机警惕装置DMD起作用。
在列车时度达到10公里时,牵引力取消。在带铅封的重大旁路控制开关VCBS置于车门安全回路旁路位置时,必须采用“RMF”和“RMR”驾驶模式。
允许打开哪侧车门由ATP给出。
5. 降级模式:MS置于“WM”位
“WM”为洗车和联挂模式,牵引系统将列车时度限制在3公里,向前运行。
由司机保证与轨道信号的一致和距离。
ATP紧急制动被旁路。
允许打开哪侧车门和打开哪侧车门由司机控制。
另外,如果司机想开关门也可将MS置于“WM”位(在列车零速时)。
当重大控制旁路开关VCBS处于粘着制动旁路位置时必须使用“WM”洗车模式。
列车静止时,可在没有触发紧急制动的情况下实现从“CM”模式到“RMR”模式,从“RMR”模式到“CM”模式的转换。
6. RM模式
ATP可用但不能实现定位功能。
N6板上的“RM”按钮灯闪烁。司机按下并以“RMF”模式驾驶。
警惕按钮装置有效
司机确保遵照轨道信号和间隔驾驶
牵引系统将列车速度限制在25km/h。
RM模式转换成SM模式要经过两个“S”棒。
7. URM模式:在无ATP保护状况下限速运行,司机须人工保证车速及开门方向的正确性。
8. AR模式:折返模式,分为有人折返和DTRO无人折返,有ATP保护。
1.连挂
连挂和解钩操作时,为确保安全,请不要站在进行连挂的车辆之间或轨道上,操作者挂钩时必须有足够的安全距离(至少1米)。
执行联挂和解钩操作时,电气连接头自动伸出和缩回,同时保护盖打开和闭合。
2.解钩
模式开关MS置于“WM”位。司机按下“解钩”带灯按钮UNPB,该灯点亮,同时解钩电磁阀得电。移动司机手柄DCH,将列车向后移动大约1米。待解钩列车处于紧急制动状态,解钩列车上也施加紧急制动(待确认)。
再次按下“解钩”带灯按钮UNPB,解钩灯熄灭。
2.客车运行中的操作
①司机在小行基地与派班员办理客车出乘手续, 并按规定于客车出库前30分钟进行
整备作业。
②客车从小行基地出时,司机凭出小行基地开放的信号,采用RM模式驾驶,运行到
转换轨一度停车,与行调联系后转换自动驾驶模式进入小行车站。
③客车配一名司机,负责了望进路、操作客车相关设备,驾驶客车按规定速度运行。
④客车入小行基地时,司机在奥体中心站(小行站)广播通知乘客全部下车后关好车
门,以ATO或SM模式驾驶客车进入转换轨转换成RM模式,凭入小行基地信号机的显示驾驶进入小行基地。
⑤客车在车站停稳后,司机迅速打开驾驶室门,观察乘客上下车情况,根据DTI显示
及《列车运行时刻表》规定的时间关车门。当车门关闭后,确认无夹人夹物后进入驾驶室根据信号动车。
⑥客车进站停车,当未到停车标停车时,司机确认运行前方无异常后,迅速以RM(SM)
模式动车对位。
⑦客车进站停车头部越过停车标时,如驾驶室后第一个客室门对着站台,按规定开
门;客车停车位置越出站台3个车门以下时,司机切除越出的车门再打开其他车门。
客车在站区内停车位置超出站台3个车门及以上时,报告行调,按行调的指示执行。
如客车不开门继续运行到前方站时,行调应通知前方站,车站应及时对站台广播,作好乘客服务。
⑦《列车运行图》中没有规定通过车站或无行调命令,司机不得驾驶客车通过车站。
但当客车通过车站或清客时,司机应及时广播通知乘客。
⑧运营时间内,列车驾驶模式原则上由司机掌握,采用RM、URM模式驾驶时应经
行调同意。
⑨客车司机在运行中要掌握好各种速度,客车运行速度见表
二、正线运行
1.ATO模式
在ATC正常情况下,客车采用ATO模式驾驶(当停车精度不能满足要求时,采用SM模式驾驶)。行车凭证是车载信号ATC。
ATO模式下列车停止是自动的。对应启动列车,当“ATO启动”按钮为绿色稳定灯光时,司机只有在列车“门关到位”灯亮时才能开车,司机需按下“启动控制”按钮才能起动列车。
ATO模式自动驾驶(站间),自动折返(无人),车门自动打开,人工关门。
2.SM模式
ATP自动防护两列车间隔,最小50米,超速保护。
ATP用于保护列车。它提供客室开门侧信息,零速信息和限速。
司机使用DCH减速和加速。目标速度显示在信号屏上。如果当前速度超过目标速度,那么ATP会启动告警。如果司机不采取减速,ATP将触发紧急制动。
在列车运行期间,司机警惕按钮DMD必须工作正常且压下。如果司机警惕按钮释放超过3秒,将触发紧急制动。
如果司机没有遵照轨道信号驾驶,ATP将施加紧急制动。
SM模式为人工开关门,先上站台再开门。
3.RM模式:
限速向前模式,限速25K/h。
按下RM按钮,灯灭,建立RM模式,人为给定速度码。轨旁电路、轨道电路故障,ATP故障,车场等情况使用。
RM模式转换成SM模式要经过两个“S”棒。“S”棒是轨道上的信号装置,间隔几百米一个。
4.WM模式:
洗车模式,用于洗车机洗车或列车救援时的连接,限速3㎞/h。无ATP保护,无车门监控也可动车。
5.URM模式:
在无ATP保护状况下限速运行,司机须人工保证车速及开门方向的正确性。
2 有人折返
a) 列车以SM或ATO模式进入有折返轨的终端站站台,显示屏出现折返图标和AR符号,列车停稳后,自动折返灯亮;
b) 司机按下自动折返按钮;
c) 自动折返灯灭,显示屏上的折返图标出现黄色背景;
d) 关车门后,停车点取消,司机可用ATO或SM模式驾驶列车进入折返轨至停车点停车,关主控钥匙;
e) 另一驾驶室的自动折返灯闪亮,RM亮,司机开主控钥匙,自动折返灯灭,显示屏显示SM模式;
f) 信号机开放,停车点取消,司机可用ATO或SM驾驶列车到站台,有人自动折返完成。
3 无人折返
a) 列车以SM或ATO模式进入站台,显示屏出现折返图标和AR符号,列车停稳后,自动折返灯亮;
b) 司机按下自动折返按钮,使自动折返灯灭,显示屏上的折返图标出现黄色背景;
c) 清客,车门关好后,关主控钥匙;
d) 离开驾驶室到站台的无人折返钥匙开关处,操作“DTRO”开关;
e) 当进路准备好后,列车自动驶入、驶出折返轨,到达站台停下;
f) 司机进入下行端驾驶室(运行方向),此时自动折返灯闪亮,RM灯亮,司机开主控钥匙,自动折返灯灭,显示屏显示SM模式,无人折返完成。
三、救援列车的开行
1. 行调决定救援或接到司机(车长)的救援请求后,向有关车站、司机(检调、派班员)发布开行救援列车的命令,及时组织备用车上线。采用无ATP保护的列车救援或因挤岔、脱轨、线路故障等可能会影响后续列车行车安全的原因救援时,必须发布封锁线路的命令。
2. 已申请救援的列车严禁动车,司机(车长)应做好防护及救援准备工作。
3. 救援列车应距被救援车20m 外停车,以5km/h速度接近故障车3米处一度停车,听候救援负责人(被救援列车司机)的指挥连挂。故障车在连挂之前可继续排除故障,但不能动车,如故障排除则报告行调解除救援。
4.向封锁线路发出救援列车时,不办理行车闭塞手续,以行调命令作为进入该封锁线路的许可。
5. 在未接到开通封锁线路的调度命令前,不得将救援列车以外的其它列车开往该线路。
6. 运营期间客车救援的工程车应采用两辆内燃机车夹平板的固定编组,并加装过渡车钩。
7. 遇到发生人员伤亡、设备损坏时,应急处理和信息发布按《行车事故处理规则》中的有关规定执行。
5. URM模式驾驶的规定
1)采用电话闭塞法组织行车时,司机采用URM模式驾驶可不派监控员上车监督驾驶。
2)单个列车ATP车载设备故障时,列车URM运行行调应通知车站上监控员监督驾驶,当列车在区间无法上监控员时可限速40KM/H运行至前方站,监控员上车后按URM模式规定速度运行。
3)监控员应协助司机了望、监控速度表,提醒司机控制速度,必要时立即按压紧急停车按钮。
4)URM模式驾驶监控员添乘程序:
a)行调向有关车站、司机发布命令。“XX次列车在XX站至XX站采用URM模式驾驶,由XX站派监控员上车监控列车,添乘密码XXX(991—999),行调XXX。”
b) 车站派胜任人员携带800兆无线电台到站台。
c) 监控员向司机报添乘密码,司机核对后同意监控员进入驾驶室。
七、隧道内线路积水时的处理
1. 巡道、巡检人员在作业中发现隧道线路积水时,应立即报行调,行调要及时发布限速命令,司机按规定速度运行。
2. 当h≥180mm时(h为积水面距轨面高度,负值表示积水漫过轨面,h值的测量,以积
水最深处为准,以下同),允许列车以正常速度通过积水段。
3 . 当50mm≤h<180mm时,允许列车按25km/h速度通过积水段。
4 . 当h<50mm时,原则上列车不准通过积水段,必须通过时限速15km/h。
5. 当积水造成轨道电路短路时,司机应尽量以惰行方式通过积水区段。
4 受电弓不能升起
检查:
●没有使用车间电源(B车)
●紧急制动按钮位被压下。
●检查A车的PANTCB,B车的RPTCB和PTCB
5 辅助逆变器不能按顺序启动
●检查DDU上的1500V电压。
●检查车底的接地开关AICB是否处于接地位
7“门关好”无响应(在DDU上)
●检查DCPB_A和DCPB_B未点亮,所有左右侧的门已关到位。
●如果所有左右侧的门已关到位指示灯DCPB_A和DCPB_B都熄灭,用DCOS隔离
在DDU上指示处于打开状态的车门。
●所有左右侧的门已关到位指示灯DCPB_A和DCPB_B有一个熄灭检查紧急解锁开关
(DDU上显示箭头)
10 牵引指令无响应(CM)
列车已被唤醒,已选择当前司机室,MS处于“CM”位,推动DCH列车不启动。
检查:
●门关到位指示灯点亮。
●停放制动缓解指示灯点亮。
●紧急制动缓解(绿色指示灯点亮)。
●ENCCB未脱扣。
如果列车启动后,牵引指令取消2秒后,常用制动没有缓解,在DDU上检查对于的车辆。
11 紧急制动复位故障
●检查车钩装置没有被损坏。
●检查EBCB。
●列车静止时:按下RMPB缓解ATP紧急制动,将MS置于“CM”,将DCH推到制动
区并按下REBPB。
●如果仍然不成功,检查两司机室的EMPB是否释放并且主风管的压力大于8巴。
●如果发生问题,可用LMRGBS旁路压力开关。
●ATPFS可用于旁路包括紧急制动的所有ATP功能。
注意:该操作司机必须承担安全责任
电子商务模拟实验报告 班级姓名学号组号时间 一、试验目的 通过实验操作,根据所学理论知识熟悉并掌握电子商务交易过程中所使用的主要技术。通过消费者的实际操作,了解网上购物的流程。通过操作了解电子商务在B2B、B2C、C2C、B2G等交易模式的具体流程,明确电子商务在这些领域的重要作用。实验过程中需要小组成员的配合,培养团队合作意识,小组成员之间互相帮助,共同完成电子商务交易的全过程。 二、使用环境 本次上机实践使用《浙科电子商务模拟教学软件》,该软件采用模拟交互教学思想,用户在实验平台中,通过虚拟的网络环境和后台管理,与实验系统中的其他用户进行商务交互。在仿真的实践过程中,熟悉电子商务的流程,提高自身的操作能力,体会电子商务对不同的企业、对消费者所包含的不同内涵,最终达到实践教学的目的。 浙科电子商务模拟软件、Windows 2000/XP操作系统、IE6.0浏览器,服务器、学生机和学生机。 三、试验内容与步骤 系统分为管理端和实验端,其中实验端又包括厂家、商场、出口商、物流、银行及消费者六大主要角色。系统实验端还内置了贸易网、网上商城、门户网、搜索引擎、电子邮件系统以及厂家、商场等创建的企业网站等常见的电子商务开展平台,不同的用户可以在权限范围内自主操作和使用这些网络平台提供的服务项目,通过虚拟的网络环境开展各自的电子商务,从而为自己扮演的角色获得利润或满足需要。 实验前,6个角色都需要注册用户才能登陆操作。现在就对各个角色的具体操作做简要的总结:
厂家 系统中厂家角色的后台管理共包括生产管理、库存管理、销售管理、营销管理、客户关系管理、应收应付、资金管理、网络访问以及小秘书等模块。 1、进入http://10.16.136.244/ZKECom 把“显示属性”中的“设置”的“屏幕的 分辨率”改为1152×864像素 2、注册:吴素琴cj 密码123 3、基本资料设置、登陆 4、申请一个Email地址并设置到企业用户资料 5、按要求申请帐户(资金管理/柜台业务/对公业务/开立帐户) 6、待开立银行帐户审批通过后进行开户张好设置(资金管理/帐号设置) 7、在“生产管理”处进行产品生产,选择要生产的产品并填写好生产数量
列车的自动防护和自动驾驶技术The Automatic Train Protection&Automatic Train Operation Technology 南京电子技术研究所(南京210013) 蔡铭军 【摘要】 介绍在城市轨道交通中应用的先进列车自动防护系统和列车自动驾驶系统技术。 关键词:列车自动防护,列车自动驾驶,轨旁,车载,轨道电路 【Abstract】 T his article intr oduces advanced autom atic train pr otectio n&autom atic train oper ation system technolog y applied in m ass transit. Key words:ATP,ATO,wayside,carborne, track circuit 1 引言 随着工业化程度的提高,市区人口急剧膨胀,城市交通压力越来越大,轨道交通是解决现代城市交通拥挤的有效手段。为提高经济效益和社会效益,对城市轨道交通的运营能力(安全性和载客能力)也提出了越来越高的要求。 提高载客能力,有两种方法:一是增加列车的车辆数目和车辆的空间容量;二是缩短行车间隔,即缩短每两列列车的发车间隔时间,以在同样的线路、同样的车辆数目条件下使载客能力相应提高。在考虑到同样载客能力情况下,方法二可使运营的经济成本降低。正是基于这种考虑,世界上一些著名的轨道交通方面的大公司,如法国的阿尔斯通(ALST OM)、德国的西门子(SIEM ENS)、美国的联合道岔与信号公司(US&S)等相继推出了各自的先进列车自动控制系统(ATC),通过ATC系统来达到减少列车运行间隔时间的目的。列车自动控制系统在技术上日臻完善,已成为城市轨道交通的一个重要环节。 列车自动控制系统(AT C)包括三个子系统: 列车自动防护(AT P)系统——负责列车的安全运行; 列车自动驾驶(ATO)系统——负责列车的全部牵引/制动控制,控制列车的站间运行和站内停车; 列车自动监督(ATS)系统——负责列车的运行监督、控制及管理。 本文主要介绍列车自动防护系统和列车自动驾驶系统。 2 系统的组成及原理 在列车自动控制系统中,轨旁与车载之间信息传输的方式可分为点式传输和连续式传输两种。点式传输是在线路固定位置上放置一些信息传感器,即信标式地面应答器。列车驶过地面应答器上方时接收应答器事先存储的地面信息,由车载计算机计算出在收到下一应答器信息之前的运行曲线。这种传输方式成本低,容易实现,但不能进行实时连续控制。连续式传输是通过沿线敷设的电缆交叉环或多信息轨道电路或无线电台来实现地面与车上的通信。显然,连续式信息传输方式可实现信息的及时更新,车载计算机可实时地计算出运行曲线,比点式传输控制性能更佳,但成本比点式传输方式要高得多。由于连续式传输更适应时代的发展,所以现各大公司基本上均采用以无绝缘音频轨道电路为媒介的连续式信息传输。利用数字编码的无绝缘音频轨道电路作为信息传输通道的列车自动控制系统由车载设备、轨旁设备和控制中心设备三大部分组成,如图1所示。其中,控制中心主要实现A TS的功能,而AT P/ATO的功能则由车载和轨旁部分共同实现。 轨旁AT P系统将线路参数以及其它数据一起通过轨道电路传输给车载AT P系统,车载ATP系统根据线路参数和列车状况计算出列车的最大允许速度曲线,并将此最大允许速度与来自测距脉冲发生器的列车此时刻的实际速度相比较,若超过最大允许速度,则列车报警且启动制动装置。在司机驾驶台上给出了一系列必要的显示,如最大允许速度、 ? 30?
13.2.2.1列车驾驶模式 1)信号系统配置的列车ATC车载设备应具有多种驾驶模式,以便司机能根据列车或信号设备的状况选用。信号承包商所推荐的驾驶模式包括但不限于: ?自动驾驶模式--ATO模式; ?ATP监控下的人工驾驶模式--PM模式; ?限制人工驾驶模式--RM模式; ?非限制人工驾驶模式--NRM模式。 2)在ATO模式下,ATP子系统保证列车的运行安全,在线列车的启动、加速、巡航、惰行、制动、精确停车均由ATO子系统控制,不需司机操作。一旦进入ATO驾驶模式,系统设备正常,没有人为干预,此驾驶模式维持不变。系统应具备以下两种功能: ?自动开车门及屏蔽门,自动关闭车门及屏蔽门,在司机按压“发车”按钮后发车; ?自动开车门及屏蔽门,人工关闭车门及屏蔽门,在司机按压“发车”按钮后发车; ?人工开车门及屏蔽门,人工关闭车门及屏蔽门,在司机按压“发车”按钮后发车。 3)在PM模式下,ATP子系统确定列车运行的最大允许运行速度,司机驾驶列车在ATP保护的速度曲线下运行,ATP子系统实现列车自动防护的全部功能。站台停车以及车门及屏蔽门的开关均由司机人工控制。 4)在RM模式下,车载ATP限制列车在某一固定的低速(如25km/h)之下运行,司机根据调度命令和地面信号显示驾驶列车,列车运行超过该固定限速时,车载ATP设备对列车实施紧急制动,强迫列车停车。列车运行的安全由联锁设备、ATP车载设备、调度人员、司机共同保证。站台停车以及车门及屏蔽门的开关均由司机人工控制。 5)NRM驾驶模式为完全人工驾驶模式,ATC车载设备处于切除状态而不监控列车的运行,司机根据调度命令和地面信号的显示驾驶列车。列车运行的安全由联锁设备、调度人员、司机共同保证。站台停车以及车门及屏蔽门的开关均由司机人工控制。 6)由信号控制的列车折返方式应包括无人驾驶自动折返模式、ATO有人监督自动折返模式、ATP 监督下的人工折返模式、限制人工折返模式。 ?无人驾驶自动折返模式。当列车在折返站规定的停车时间结束及旅客下车完毕,车门和站台屏蔽门关闭后,经过必要的操作确认司机下车,由司机按压站台“无人自动折返”按钮后采用此模式。列车可在无人驾驶的情况下,从到达站台自动驾驶进入和折出折返线,最后进入发车股道自动打开车门和站台屏蔽门,在整个折返过程中无需司机在车上对列车进行操作。列车到达出发站台停稳,确保司机进入另一端驾驶室后方可启动列车。 ?ATO有人监督自动折返模式。当列车在折返站规定的停车时间结束及旅客下车完毕,车门和站台屏蔽门关闭后,由司机按压车上相关的“折返按钮”,列车自动驾驶进入和折出折返线,返回到发车站台后,自动打开车门和站台屏蔽门。司机在列车折返过程中任何时间均可关闭本端驾驶盘,开启反向端驾驶盘。 ?ATP监督下的人工折返模式。在此模式下,司机采用“控制手柄”控制列车运行,司机人工驾驶列车运行到折返线并停车,人工关闭本驾驶端驾驶盘和启动反向端驾驶盘,在ATP监督下人工驾驶列车进入发车股道并定位停车。司机按压开门按钮打开车门和站台屏蔽门。
北京市城轨电动列车司机安全技术 培训考核题库
一.选择(单选) 1. 按照信号的接收效果,可以将其分为:( C ) A视觉信号和车载信号B地面信号和手信号C视觉信号和听觉信号D地面信号和车载信号2. 按照信号机设置的位置不同,可以将其分为:( D ) A视觉信号和车载信号B地面信号和手信号C视觉信号和听觉信号D地面信号和车载信号 3. 车载信号设备安装在列车的( D ) A. 车下电气箱内 B. 动车轴头 C. 拖车轴头 D. 驾驶室 4. 城市轨道交通信号的基本要求:( A ) ??各种信号机的灯光排列顺序、颜色、外形尺寸应符合规定的标准 ??信号机的显示方式和表达的含义必须统一并且符合规定的要求 ??信号机的设置须能够进行实时检测、故障报警,为列车运行提供安全保障、正确指示??为了保证信号显示明确,防止行车有关人员误认,在地铁沿线及站内,禁止设置妨碍确认信号的红、黄、绿色装饰彩布、广告、标语和灯光。当车站内已装有妨碍确认信号的灯光设施时,应改装或采取遮光措施。另外,站内所装设施妨碍司机了望信号时,对该设施要采取移位或拆除 A????B?? C ??? D ??? 5. 通常地面信号机设置于隧道墙壁上,特殊情况(如受到设备限界、其他建筑物或线 路条件等影响时)可设于列车运行方向的或其他位置。( B ) A右侧B左侧C上侧D后侧 6. 城市轨道交通的信号的基本颜色为( B ) A. 红、绿 B. 红、绿、黄 C. 红、黄 D. 红、绿、黄、白 7. 城市轨道交通的信号中的月白色灯光主要用于( C ) A. 出站信号 B. 防护信号 C. 调车信号 D. 阻挡信号 8. 信号机防护的一方叫;信号机显示的一方叫( A ) A内方;外方B前方;后方
电子商务模拟实验报告 一、试验目的 通过软件模拟电子商务的交易过程,提高实践能力。系统模拟电子商务过程中涉猎到的众多网络背景,提供包括商贸网、网上商城、门户网站、搜索引擎、电子邮件系统等常见的网络服务平台,通过厂家、商场、物流企业、外贸公司、银行以及消费者六大主要角色之间的自主商务交互,集中展现电子商务主要的交易流程与核心理念,更深入地了解电子商务的实际流程,体悟电子商务的理论。 通过对软件的使用,把课本上的电子商务理论与具体实践相结合,加深对理论知识的认知,掌握实际应用的技能和电子商务理念,加强感性认识及实际操作的能力。通过软件学习电子商务各种交易模式的详细流程,并以不同的角色、从不同的角度参与其中,自主的开展和使用电子商务。 二、使用环境 1、通过Internet访问整个电子商务模拟环境。 2、与校园的内部网络相连。 3、电子商务实验室通过数据库服务器、文件服务器、Web服务器等建立整个电子商务模拟环境。 4、宽带网络:便于通过宽带网络方式与电子商务实验室联系。 5、操作系统:Microsoft Windows 98或更高版本;浏览器:Internet Explorer 5以上 6、浙科电子商务模拟教学软件 三、试验内容与步骤以及相关数据记录 由于整个电子商务实验系统分为六大角色——厂家、商场、物流、出口商、银行以及消费者,缺一不可,为了让学生实践每个角色,同时营造出接近现实的市场环境,所有参加实验的学生均分为六人一组,同一个学生在分别注册用户到相应的班级扮演不同的角色。 1.厂家 在《浙科电子商务模拟教学软件》的实验端,厂家角色是以产品最终供应商的身份存在的,系统中交易的所有商品(拍卖网除外)都是由厂家生产并供应的,而其他角色的商品都直接或间接的购买自厂家。系统中厂家角色的后台管理共包括生产管理、库存管理、销售管理、营销管理、客户关系管理、应收应付、资金管理、网络访问以及小秘书等几大主要模块,通过企业管理后台的这些能模块,厂家角色可以快捷有效的处理日常运作中遇到的各类事务。 厂家用户在补充完企业资料进入系统后,首先要为企业开始电子商务做好准备工作,这些准备工作包括:
火车是如何驾驶的? 火车怎么驾驶,为什么有的会出轨? 回答关注 (12) 邀请回答 微博 微信 QQ空间 8个回答 中国新年02-08 15:39 1110赞 踩 火车的驾驶不是简单能说完的,机务是一个非常专业的大工种,只能简要地讲一讲. 火车没有方向盘,线路和方向不用司机控制,所以他们只需要控制好速度,按规定停车就可以了.速度控制一般在操纵台上
体现为司机控制器,一般有级调速的是一个手轮,和方向盘差不多,上面有0-16一共17个档位.无级调速的多为一个手柄,上面是0\1\降\保\升5个档位.现在有些新车是有档无级的,比如DF11和DF8B.列车制动是靠两个闸来实现的,一个是单阀,用来机车制动,一个自阀,用于全列制动,这两个闸都在司机控制台上.总起来说,司机右手控制速度,左手负责制动,脚上踩的是风笛.所不同的是内燃机车的控制手柄控制的是柴油机转速,其他由联合调节器自动完成,电力机车控制的是牵引电流. 火车之所以能够在铁轨上行驶,就是因为火车的车轮有轮缘,在车轮的内侧,就是靠轮缘把火车紧紧地卡在铁轨上. 至于列车走哪条线路,是由各车站控制的,具体由车站值班员下达命令,由助理值班员或者信号员通过运转室的控制台来控制,这些都在信号楼内完成.现在国家铁路一般都是用的6502电气集中联锁,准备进路很容易,只需要按几个键,进路就会准备妥当,列车自然就会沿着开放好的进路通过或者停车.至于转线是靠道岔来完成的,道岔的作用就是是机车车辆由一条线路转望另一条线路或越过起交叉的一条线路.
为何有是会脱轨?有这么几种情况1、检修不到位,钢轨螺丝松脱。2、自然灾害泥石流冲夸路基。3、 超速行驶,特别是弯道超速更容易脱轨。4、列车追尾也是脱轨的主要原因!案例就是2011年7月23日20时30分05秒,甬温线浙江省温州市境内,由北京南站开往福州站的D301次列车与杭州站开往福州南站的D3115次列车发生动车组列车追尾事故,造成40人死亡、172人受伤,中断行车32 小时35分,直接经济损失19371.65万元。 181评论 分享 历史旅行者01-25 18:58 105赞 踩
实习总结 时光飞逝、一下子俩周的时间就过去了、这俩周我们在南院的模拟驾驶室中渡过、我们的指导老师是邓爱喜老师,感谢老师对我们这些调皮学生的容让和关心,以下是我的模拟驾驶的学习心得:地铁列车模拟驾驶器是计算机多媒体仿真技术、列车动力学和列车控制理论等相结合的产物。其基本原理是: 根据机车电路及气路控制关系、线路纵断面情况、司机操纵情况及列车运行动力学等建立数学模型,用计算机进行仿真运算和控制,复现真实列车的控制和运行规律。以往的列车驾驶模拟器功能简单、性能较低,主要侧重于司机在列车运行中的实际操纵训练和动力学分析,对训练环境的逼真程度要求不是很高,解决列车相关故障的培训也是在模拟驾驶器实物上完成,只能实现部分故障处理操作训练。地铁列车模拟驾驶器应用、CGI成像技术来完善其环境逼真程度,应用计算机多媒体仿真技术模拟列车故障处理系统,通过软件仿真完成无法在硬件上进行的故障排除操作。同时,列车模拟驾驶器应用虚拟仿真技术设计虚拟列车设备,对难以用硬件完成的列车部件进行全数字化仿真,实现了从硬件到软件完全覆盖列车运行中所遇到的各类故障的处理操作。列车模拟驾驶器不仅用于培养司机的操纵技术,更重要的是能培训司机的故障分析、判断及实时查找和排除能力。 一丶地铁列车模拟驾驶器故障处理功能的模拟方法 多媒体故障处理系统是地铁列车模拟驾驶器得以广泛应用的主 要因素之一,其逼真程度是衡量列车模拟驾驶器性能的主要指标。在
列车模拟驾驶器中,故障处理功能的模拟主要有配置实物模拟和计算机软件模拟等两种方法。 ( 1) 实物电器柜模拟: 通过人为的方法将实物电器柜和控制柜 的故障直接设置在相应的实物上,故障的判断和处理也是在实物上进行,训练方法几乎与实际一样。其优点在于具有极强的实用价值,不足在于占用的场地空间较大,无法进行破坏性故障的设置和突发故障的设置,系统的工作量大、可靠性较差,一旦实物电器柜自身故障或故障无法排除,列车驾驶模拟器的正常培训将难以继续。 ( 2) 计算机软件模拟: 借助于计算机多媒体软件技术,将实物电器柜以2 维或3 维模型方式展现给受训司机,将列车控制逻辑与模型相结合,允许司机在电器柜模型中通过交互方式查找、判断和排除故障。其优点在于设置故障的工作量小,可随意撤销或者设置故障,且可以作为理论教学辅助工具,不足在于软件设计需要机车制造商提供全面、详实的相关资料,开发周期相对较长,难度较大。 列车模拟驾驶器的多媒体故障处理可同时采用软件仿真与实物 配置模拟。即对司机室及其控制设备、电器柜、地铁列车塞拉门、屏蔽门等采用实物模拟,对逻辑控制较为简单的电路系统以及无法用硬件实做的车底设备、车顶设备、客室设备等采用计算机软件模拟。另外,多媒体故障处理可采用预置方式设置突发事件,采用即时产生方式设置电器电路故障,以最大限度地满足教与学的需要。 二丶多媒体故障处理系统的主要功能及其实现
飞行模拟器实习报告 本学期上海工程技术大学飞行学院举行了飞行模拟武器实习。作为飞行学院的一名大三学生,我参加了这次模拟机实习。本次实习分为三个阶段:1、陆总的《YGI概念型模拟器飞行操作教程》的讲座; 2、上机训练; 3、教员和老师的讲评。 此次实习的目的:本实习是飞行技术专业本科生的一项专业实习,其目的是通过对YGI概念型模拟器飞行操作教程的学习,加深对所学专业的理解,明确实习目的。要求学生通过上机训练,将课本所学的理论知识与实际操作相结合,掌握飞行的一般程序和基本操作方法,初步学会机组资源管理,考察学生的飞行综合能力,为后续去国外航校的飞行训练奠定基础。 一开始在没有学习专业课的时候,大一下学期我们也参加了一次飞行模拟器的飞行训练,但是由于什么都不知道,根本不知道也记不清楚当时我们学会了些什么,我们飞了些什么。这次实习前陆总给我上了一场讲座——《YGI概念型模拟器飞行操作教程》,介绍了上海工程技术大学飞行学院YGI概念型模拟器驾驶舱布局与设备和现代民用大型运输飞机的基本飞行操纵方法。其内容包括了设备及仪表、飞机的性能,正常飞行程序、非正常飞行程序和飞行检查单。在设备与仪表中,飞行姿态显示器是最重要的。它的功能是:显示了飞机的俯仰与坡度—飞行姿态;飞行速度;飞行高度;升降速率;显示航向还有ADF指针等等。飞机性能主要看以下几个数据:起飞速度,着陆速度,起飞滑跑距离,着陆滑跑距离,巡航速度,最大巡航速度等
等。让我记忆最深刻的是起飞速度,其中V1(决断速度其大小等于135海里/小时)、VR(抬轮速度138海里/小时)、V2(其大小为143海里/小时)很重要,起飞的时机要把握好。正常飞行程序分为:驾驶舱检查程序、发动机启动程序、滑行前程序、滑行程序、起飞前程序、起飞程序等等。在起飞前,这些程序都要一步一步做的,副驾驶配合机长完成,且必须做的眼到手到。这是为了检查飞机的状态是否能够安全起飞。非正常飞行程序虽然很少见,但是也有发生的,下面我来介绍一下非正常飞行程序。出现非正常情况有这些因素:中断起飞、一台发动机失效(V1后继续起飞)、单发目视进近、单发复飞、发动机发生火警、两台发动机失效、陆地迫降、起落架发生故障、襟翼发生故障。这些问题一旦出现就一定要执行非正常检查单,飞行员一定要冷静处理,相信自己的技术,因为我们的目标就是建立一个安全舒适的飞行环境。通过陆总的讲座以及我学习的专业课知识,以上便是我的一些学习心得。
城市轨道交通列车自动控制系统简介 、前言 随着城市现代化的发展,城市规模的不断扩大,城市轨道交通的发展已成为解决现代城市交通拥挤的有效手段,其最大特点是运营密度大、列车行车间隔时间短、安全正点。城市轨道交通列车自动控制系统是保证列车运行安全,实现行车指挥和列车运行现代化,提高运输效率的关键系统设备。 二、列车自动控制系统的组成 列车自动控制(ATC系统由列车自动防护系统(ATP、列车自动驾驶系统(ATO和列车自动监控系统(ATS三个子系统组成。 一列车自动防护( ATP-Automatic Train Protection 系统 列车自动控制系统中的ATP的子系统通过列车检测、列车间 隔控制和联锁(联锁设备可以是独立的,有的生产厂商的系统也可以包含在ATP系统中)控制等实现对列车相撞、超速和其他危险行为的防护。 二列车自动驾驶系统 ( AT0?CAutomatic Train Operation 列车自动驾驶子系统(ATO与ATP系统相互配合,负责车 站之间的列车自动运行和自动停车,实现列车的自动牵引、制动 等功能。ATP轨旁设备负责列车间隔控制和报文生成;通过轨道
电路或者无线通信向列车传输速度控制信息。ATP与ATO车载系 统负责列车的安全运营、列车自动驾驶,且给信号系统和司机提供接口。 三)自动监控(ATS-Automatic Train Super -vision )系统 列车自动监控子系统负责监督列车、自动调整列车运行以保证时刻表的准确,提供调整服务的数据以尽可能减小列车未正点运行造成的不便。自动或由人工控制进路,进行行车调度指挥, 并向行车调度员和外部系统提供信息。ATS功能主要由位于OCC 控制中心)内的设备实现。 三、列车自动控制系统原理 一)列车自动防护(ATP) ATP是整个ATC系统的基础。列车自动防护系统(ATP亦 称列车超速防护系统,其功能为列车超过规定的运行速度时即自动制动,当车载设备接收地面限速信息,经信息处理后与实际速度比较,当列车实际速度超过限速后,由制动装置控制列车制动系统制动。 ATP通过轨道电路或者无线GPS系统检测列车实际运行位 置,自动确定列车最大安全运行速度,连续不间断地实行速度监督,实现超速防护,自动监测列车运行间隔,以保证实现规定地行车间隔。防止列车超速和越过禁止信号机等功能。 按工作原理不同,ATP子系统可分为“车上实时计算允许速
城市轨道交通列车驾驶基本操作 列车司机在出乘前应按照相关管理办法、操作指南、司机手册等要求做好运行前的准备工作,在作业中应注意如下事项: 1、找到对应列车后,先做到“库内动车四确认”。 2、按《列车检查作业标准》做好列车静态检查和动态测试,并控制作业时间。 3、检车时遇到列车因故障而无法进行出库作业时,及时跟车场调度员联系。 4、在车站出乘与交班司机交接时,要清楚列车的技术状态及线路限速与施工情况。 一、投入蓄电池 按下司机操纵台上的蓄电池合按钮,蓄电池即投入使用,通过司机室右侧屏上的蓄电池表可观察到蓄电池电压应该为DC 110 V。 如果蓄电池亏电,即蓄电池电压低于DC 80 V,将司机室继电器柜中的蓄电池欠压强投开关转换到“强制”位,蓄电池即可强制投入使用,当蓄电池电压高于DC 89 V时欠压继电器恢复,蓄电池可以正常投入使用。 二、激活头车 根据实际运行方向,将运行方向前端司控器钥匙开关转换到“开”位,尾端保持在“关”位,通过司机操纵台上TMS显示屏观察到列车有司机室占用显示,表示4016车司机室被占用。 三、控制受电弓 观察司机操纵台上的风压表,如果总风压力高于450 kPa,按下司机室右侧屏上的升弓按钮并持续2 s后松开,车顶上受电弓在8 s内升弓到位,通过司机操纵台上TMS显示屏观察到Mp车受电弓升弓显示,并且电压显示为1 500 V,同时右侧屏的网压表显示为1.5 kV。 如果总风压力低于450 kPa,可以通过控制动车客室下部的受电弓电动气泵来打风。具体操作为:按下司机室右侧屏上的升弓泵按钮,两个动车的电动气泵开始工作;当风压力高于750 kPa时电动气泵停止工作,这时辅助风缸的压力值
汽车驾驶实习报告 时间:2013.01.14---2013.01.18 地点:土木楼模拟驾驶室、城市驾校 指导老师:龙琼老师 一.实习的目的和要求: 1.实习目的与任务 驾驶实习是交通工程专业教学计划的重要组成部分,是贯彻理论联系实际,培养全方位人才的重要实践环节,其目的与任务是:通过参观与讲解,了解汽车结构及工作原理; 通过冷车模拟热车模拟 ,掌握汽车驾驶程序及方法; 通过道路驾驶实习,初步掌握汽车起,停,转弯,会让车技术; 把所学的实际操纵贯通起来,为专业课学习打下基础。 2.实习具体要求 1)能够熟悉车辆构造及工作原理; 2)独立完成实习报告; 3)能够独立熟悉驾驶车辆。 2.驾驶姿势: 驾驶人的坐姿应该自然,不要紧张,身体过于紧张向前倾斜的坐姿会迅速使驾驶人疲劳,且有害于健康,过于自由放松的坐姿会分散注意力,以致遇有出事或撞人的危险时,不能迅速采取必要措施。 正确的坐姿是:端正自然,双手掌握转向盘,两眼向前平视,看远顾近,注意两旁,身靠后背垫,胸部挺起,两膝放开,脚放在离合器旁边和加速踏板上,初学者必须端正姿势,以养成正确驾驶的习惯。 二、实习的内容
(一)实习前的准备工作:通过上网,我了解到了汽车行驶的基本操作。 1.车辆的基础知识 通过观看视频,了解到了汽车动力系统,传动系统,控制系统,驾驶操作装置车架与车身等,并熟悉发动机的工作原理。 2.车辆的驾驶操作 1)冷车实验:掌握汽车档位,离合器,油门,刹车,仪表,指示灯,喇叭的正确使用方法及他们之间的配合。实验分为老师讲解和同学实际操作两大块。首次接触车辆未免有些手足无措,首先在老师讲解下了解了档位的设置情况以及如何操作;离合器,刹车,油门的分布情况;仪表的分布以及仪表的识别,了解其所反应的内容;了解指示灯的作用,分布和应该如何使用指示灯。在对驾驶基本知识有了一定了解后就是实质性的应用了,“上车了”分组分人次上车进行实际操作,点火,启动,加速,换挡,停车注意各各过程的联系与注意的相关事项。虽然不是实车但很真实也很有趣,虽然有游戏中的感觉但也确实领略到了驾驶的感觉。 3.起步 1)、踩下离合器踏板,将变速杆置于一档或二档的档位,以克服较大的静止惯性力; 2)、按喇叭、发出警告信号、放松手制动杆; 3)、松起离合器踏板,待动力与传动部分连接时,离合器踏板稍停,逐渐加油,待车辆平稳前进后,松开离合器踏板; 4)、如感到动力不足不能起步时,应迅速踩下离合器踏板,重新起步以防止熄火; 5)、坡道起步除上述动作外,为防止车辆后到,须再放松离合器踏板的同时踩下加速板,待离合器接合时(发动机声逐渐降低,车要开始向前移动),再放松手制动杆。 4.停车
文章编号:100021506(2002)0320036204 地铁列车自动驾驶系统分析与设计 黄良骥,唐 涛 (北方交通大学电子信息工程学院,北京100044) 摘 要:对地铁列车自动驾驶系统进行分析,并对列车自动驾驶系统的车载设备进行设计. 关键词:列车自动控制系统;列车自动驾驶系统;自动控制 中图分类号:U284.48 文献标识码:B System Analysis and Design of Autom atic T rain Operation on Metro HUA N G L iang-ji ,TA N G Tao (College of Electronics and Information Engineering ,Northern Jiaotong University ,Beijing 100044,China ) Abstract :In this paper ,the existing metro Automatic Train Operation (A TO )systems have been analyzed in China and the design of an onboard A TO system is proposed. K ey w ords :Automatic Train Control (A TC );Automatic Train Operation (A TO );Automatic Con 2 trol 对于城市轨道交通系统高效率高密度的要求来说,列车自动控制系统(A TC )是必不可少的.A TC 系统包括:列车超速防护子系统(A TP :Automatic Train Protection )、列车自动驾驶子系统(A TO :Automatic Train Operation )、列车自动监控子系统(A TS :Automatic Train Supervision ). A TS 子系统可以实现对列车运行的监督和控制,辅助行车调度人员对全线列车运行进行管理.A TP 子系统则根据地面传递的信息计算出列车运行的允许安全速度,保证列车间隔,实现超速防护.A TO 子系统根据A TS 提供的信息,在A TP 正常工作的基础上,实现最优驾驶,提高舒适度、降低能耗、减少磨损. 国外已研制了适用于高密度城市轨道交通的列车自动驾驶系统,并在城市轨道交通系统中广泛应用.我国在此项技术上研究较少,20世纪80年代以来,北京地铁、上海地铁、广州地铁均以巨额代价引进了国外的设备,近年来,为缓解市内交通紧张、减少空气污染发挥巨大作用.地铁的发展建设受到国家及各大中城市的普遍重视,许多城市的地铁正在设计建设,为降低地铁投资,迫切需要国内研究具有自主产权的适于城市轨道交通的列车自动驾驶设备. 1 ATO 系统分析 1.1 AT O 工作原理[1,2] A TO 子系统能保证运行时间与定点停车,还能提高运行效率,提高舒适度,减少能耗.但作为A TC 的一个子系统,它的功能是要依靠A TC 各子系统协调工作共同完成的,缺少A TP 与A TS 子系统,A TO 将无法正常工作. 从运行中所起作用来说,A TO 主要实现驾驶列车的功能,能进行车速的正常调整,给旅客传送信息,进行车门的开关作业,但这只是执行操作命令,不能确保安全,这就需要A TP 来进行防护.A TP 起监督功 收稿日期:2001209218作者简介:黄良骥(1978— ),男,广东普宁人,硕士生.em ail :hliangji @https://www.doczj.com/doc/5a8159567.html, 第26卷第3期2002年6月 北 方 交 通 大 学 学 报JOURNAL OF NORTHERN J IAO TON G UN IV ERSIT Y Vol.26No.3J un.2002
列车司机安全驾驶规定 一、列车司机安全作业基本要求 1、列车司机必须牢记“安全第一”的宗旨,学习和遵守有关的安全规定与运行规则,严格按照安全制度、行车规则执行乘务驾驶任务。 城市轨道交通是一个现代化程度很高的实体,必须由具有良好职业素质的人去完成各种行车任务,列车司机作为一线的列车操作者,必须有高度的安全意识和服务意识,并且要具有严格遵守规则的素质才能确保运行正常进行。通常把富有纪律性、严格执行规章制度的列车司机看作保证安全行车的基本因素之一,在人与技术设备的有机联系中,人是主要的方面,再精良的设备、再好的技术、再完美的规章,在实际操作层面也无法取代人自身的素质和责任心。对国内外历次事故的分析与调查都表明,由于人为失误造成事故的比例高于技术缺陷造成事故的比例。因此,行车人员树立安全意识、学习和遵守安全规定是十分重要的。 2、列车司机必须掌握列车的基本构造、性能,具有一般的故障处理能力,熟悉城市轨道交通线路和站场等基本设施情况,包括必须明确驾驶区段、站场线路纵断面情况。 列车司机必须对列车有一个较完整的了解,主要表现在对操纵列车技能的掌握和对主要部件构造、性能的了解方面,只有在此基础上,才能够使自己具备处理故障的能力。在列车运行中出现故障的情况具有经常性,特别是有关功能性的故障出现较多,所以能够及时、准确地排除故障实际上已经成为判定列车司机技术业务水平的重要指标。一名列车司机的技术业务水平还表现在对线路纵断面的熟悉程度方面,并在驾驶技术上得到具体体现。所谓线路纵断面,一般是指线路中心纵向垂直断面,它表示地形、状况、线路坡度、线路长度、里程、标高及线路周围情况等。经过学习和经验积累较好地掌握了线路纵断面状况后,就能得心应手地驾驶列车投入运营,应付各种运行过程中的突发事件。 鉴于列车司机在整个运行过程中的重要作用,城市轨道交通管理部门规定了列车司机上岗值乘的必要条件。首先是司机必须考取政府部门颁发的职业技能鉴定证,并通过公司上岗证考试;其次是脱离驾驶岗位6个月以上,如再需驾驶列车必须对业务知识和安全运行知识等进行再培训与考核并且合格;对司机的纪律性和身体状况、心理状况要由相关管理部门做出鉴定。符合以上几个必需条件时
erp模拟企业实训总结归纳 erp,初次听见这个词感觉很生疏,又感觉很新奇。所以,带着生疏和新奇的心情,我们开始了我们的erp实验。对于我们这些好没走出校园的人来说,这是件既让我们有点担忧,又有点兴奋得事情。在刚开始的时候,大家都是一样,都在担忧这该怎样经营下去,而不让企业破产。 erp刚开始的时候,我们是分组,6人一小组,其中ceo1,cfo1名,财务助理1名,负责采购1名,负责市场开发和营销1名,负责生产运营1名。当我被推选为担当采购经理一职时,我整个人就开始有点紧张。虽然只是模拟的生产经营,但还要和其他组竞争,同时也希望我们的企业能经营好,于是觉得自己有了一份责任。实验开始前,我们把我们公司的名字和宣传标志及口号商讨好。我们公司的名字很特殊,名为“万里牛”,这就韵语了比千里马跑的更快,同时又具备了牛身上稳重塌实的个性。公司整体规划制定好之后,一个非常重要的关键是组织好团队人员很好的施行我们的策略。我们团队的人员的学习能力都很强,并且都很用功,所以工作业务上手很快。对于各个成员的工作,首先要内部团结。我们团队从一开始到最后,都没有出现不愉快的事情。 其中财务总监是专门做公司财务,确保公司各项的财务不出差错。生产和采购总监共同负责生产和采购。两位营销总监负责市场营销兼和我共同商量一些公司策略.在实验过程,给我印象最深的是:以前总
是凭印象凭感觉做一些决定,很多情况下这样的决定是不科学,虽然凭着主观经验可以做的很好。在这个实验中,有教师的时刻提醒,终于让我的这种工作方式有了较大的改变。在实验中碰到一个决策我都会亲自计算一下这样决策后的效益,假如可行或者不可行,我都随时更正自己的决策,这样的决策到达的效果一般可以用完美来形容。比如说原材料采购的时候,公司可以做到不多一个原材料。这也是作为一个采购经理的职责。而对于企业经营之道的理解,终于不单单只是停留在了书本的理论之上,通过实际的操作,也初尝了其中的酸甜苦辣。实验就是要对企业的各项资源进行合理规划,这种规划不能只凭感觉去支配、决策,而是要根据所模拟的市场环境(即比赛中各项规则、市场预测表)、企业竞争力(即团队特点、经营状况)等进行预测,制定合理的经营目的,以及开展战略,做出决策。而每一步都通过数据的比较分析得出,真正做到用数据说话。不管在做实验时还是比赛时,我都深深领会到这种精准的预测计算不仅是短期经营稳定的保证,而且是准确制定开展路线,确定市场需求,赢得订单,扩展规模,减少损失,实现长期目的,求得权益最大化的一个关键。眼前的每一个步骤都与将来有着亲密的联络,不能做到准确计算预测,就不能把握企业的命运。比如营销工作中,每年都必须对下一年的市场需求和竞争环境做出预测,少投100万广告费可能就会拿不到所需的订单,而多投100万也可能会使权益造成无须要的减损。这一多一少往往影响到企业的财务指标,从而影响企业下一年的经营。又比如我们起初制定的开展方案也是凭经验想迅速扩张,然而通过实际演算,我
浅析全自动无人驾驶地铁列车在中国的发展 目前城市人口迅速膨胀,据世界铁路研究所预测,到2016年,全球将有500 多个城市的居民超过百万,随着城市人口增加带来的城市交通拥堵问题日益严重。城市轨道交通在解决城市交通拥堵中起到了显著作用,近年来世界范围内的城市地铁线路数量不断的在增长。而在此过程中轨道交通运行控制系统也经历了从人工驾驶到半自动驾驶再到地铁全自动驾驶的转变,轨道交通系统的安全性和自动化程度也得到了不断提高。但随着载客压力的不断增加,运行速度的不断提高,列车运行密度不断增加,使得地铁线路日益拥挤带来的运营安全挑战成为轨道交通发展的难题。而实现信号和地铁自动化将有效解决轨道交通网络饱和的问题,同时有效地提高城市运输能力,城市轨道交通正在向全自动无人驾驶的运行模式发展。 我们知道,现在中国的高铁技术在国际上已经处于领先地位,但是在城市轨道交通的技术方面还是相对落后的,特别是在全自动控制技术这一方面,与国际先进水平的差异比较大。近年来自动化地铁在全球轨道交通领域日渐升温。目前,巴黎、新加坡等城市全自动化地铁已正式投入运营,还有马赛、柏林等城市正在将原有的传统地铁改造为全自动化地铁。连接美国曼哈顿和布鲁克林的纽约地铁L号线经过改造,正式启用自动控制系统。迪拜地铁是阿联酋投巨资兴建的世界上最长的无人驾驶城市快速轨道交通系统。而在我国大陆地区轨道交通无人驾驶处于起步阶段。上海地铁10号线是我国第一条FAO(全自动无人驾驶系统)地铁线路,但在运营上,列车上还是会有司机人员,只是司机的职责不是控制列车,而是为乘客提供安全防范讲解以及紧急情况下的处理。据悉,未来北京将有6条地铁线路实现无人驾驶,而最近的一条全自动无人驾驶线路也将在2016年建成通车,它就是北京的燕房线。北京的燕房线列车通车后将实现“全无人驾驶”,最高运行速度为80千米/小时,最大载客量为1262人。列车采用IEC62267标准中规定的GOA4级全世界最高自动化等级进行研发设计,已经达到了国际领先水平。可以说全自动驾驶系统的地铁将是未来城市轨道交通发展的趋势。 全自动无人驾驶系统指的是完全没有司机和乘务人员参与,车辆在控制中心的统一控制下实现全自动运营,自动实现列车休眠、唤醒、准备、自检、自动运行、停车和开关车门,以及在故障情况下实现自动恢复等功能,包括洗车也能在
2014~2015学年第2学期 汽车服务实践《事故车辆模拟查勘》实习报告模版 闽AXXXXX事故车辆(轿车)的保险查勘定损报告 一、查勘定损材料 1、已发生交通事故、牌照号为闽AXXXXX的轿车 附:第一组环境照片2张 2、道路交通事故现场查勘照片。 附:第二组、第四组照片 3、机动车车辆信息复制件。 附:第三组照片中前2张照片,第九组中前2张照片。 二、查勘摘要 某某年某某月某某日某某时某某分,牌照号为闽AXXXXX的轿车在本市某某区某某路与某某路路段发生某某交通事故。 三、查勘过程 (一)客户出险后,公司于某某月某某日中午某某时派人前往查勘。 1、出险原因及经过:某某年某某月某某日某某时某某分许,被保险人某某驾驶某某车行驶至某某地点 因某某原因,造成了怎样的事故,车辆损失有哪些。 2、查勘处理意见:经我公司查勘,情况属实,事故责任认定情况,到达第一现场情况;如有受伤人员如何处理,事故车如何处理。
3、查勘时间:某某年某某月某某日某某时。 (二)车辆登记状况检验 标牌显示该车为???,生产日期为某某年某某月,车架号为某某某经验核,与该车车辆信息记录的后六位数相符。 (三)整车损坏情况查勘 附该车损伤照片:即第五组、第六组、第七组与第八组照片。 (四)事故现场示意图 手绘现场示意平面图: 道路平面图、中间白线、两车事故位置等。 四、鉴定与处理意见 事故责任认定与处理意见,文字描述 五、保险人信息 单方或双方:行驶证,驾驶证(即第三组第3张与第九组第3张) 如对方没有,可不粘贴 六、定损清单 例如: 建议维修地点:4S店或普通维修店(注意价格不一样) 定损价格:(例子)汽车前保险杆左侧损坏,保险杠多少钱,喷漆多少钱,工时费多少钱等,总计多少钱。
基于CBTC控制的列车全自动驾驶系统(FAO)的发展及应用 【摘要】主要介绍全自动驾驶(FAO)系统的发展和应用情况、系统的组成和特点。介绍了车-地通信方案,对国内外车-地通信方式进行了比较,对GSM-R 网络进行了详细的分析,并指出作为无线传输的GSM-R网络具有适应我国铁路运输特点的功能优势。 【关键词】全自动驾驶;基于通信的列车运行控制系统全自动驾驶系统;双向传输;车-地通信;GSM-R 1.引言 全自动无人驾驶系统是一种将列车驾驶员执行的工作,完全由自动化的、高度集中的控制系统所替代的列车运行模式。 目前,国内许多城市都在建设城市轨道交通网络,那些人口在千万以上的特大城市,其发展往往是跨越式的,要求建设的城市轨道交通在互联互通、安全、快捷、舒适性方面具有很高的水平。许多大城市如上海、北京和广州均有计划采用先进的、高可靠的、高安全的基于CBTC(Communication Based Train Contro,基于通信的列车控制系统)控制的全自动驾驶系统(Fully Automatic Operation,FAO)来达到以上要求。 2.FAO的系统结构 FAO系统实现列车的自动启动及自动运行、车站定点停车、全自动驾驶自动折返、自动出入车辆段等功能,同时对列车上乘客状况、车厢状态、设备状态进行监视和检测,对列车各系统进行自动诊断,将列车设备状况及故障报警信息传送到控制中心,对各种故障和意外情况分门别类,做出处置预案。 2.1 信号系统主要包括以下部分 (1)控制中心设备:中央自动列车监督系统(Automatic Train Supervision,ATS)、电力SCADA系统和综合监控系统。(2)轨旁设备:轨旁列车自动防护/列车自动驾驶系统(Automatic Train Protection and Automatic TrainOperation,ATP/ATO)、车站ATS系统、联锁CI系统、定位系统和综合维护系统。(3)车载设备:车载地车无线接收/发送单元、车载ATP/ATO设备、牵引和制动、列车定位系统。(4)地车信息传输系统:一般采用基于通信的多服务的冗余数据传输系统(Data Tansm issionSystem,DCS),实现地车的双向信息传输。目前主要的CBTC系统实现地车信息传输的方式有:交叉环线、泻漏波导/漏缆、无线传输等。(5)列车定位系统:车载速度传感器和雷达传感器对于FAO系统,实现列车安全控制和间隔控制与传统列车自动控制系统(Automatic Train Control,ATC)的基本组成、功能和安全性要求是一样的,特殊的是对这些相关系统的可靠性、可用性及应急预案处理的要求将大大提高